Изобретение относится к устройствам для получения изображений, специально предназначенным для фотографической съемки местности.
Известно достаточно много типов беспилотных воздушных судов (БВС), применяющихся для решения различных прикладных задач путем ведения аэрофотосъемки и видеонаблюдения подстилающей поверхности с помощью размещенной на их борту оптико-электронной аппаратурый видимого диапазона (фото- и телекамер) и (или) длинноволнового инфракрасного диапазона (тепловизоров). Среди них можно выделить БВС, разработанные в интересах проведения аэрофотосъемки, например, описанные в статье (Зинченко О.Н. Беспилотный летательный аппарат: применение в целях аэрофотосъемки для картографирования / О.Н. Зинченко. // (www.racurs.ru/www_download/articles/UAV_1.pdf)).
Как правило, аэрофотосъемка и видеонаблюдение подстилающей поверхности в условиях недостаточной освещенности (ночью) осуществляется с использованием оптико-электронной аппаратуры длинноволнового инфракрасного диапазона (тепловизоров). Недостатками этого способа аэрофотосъемки и видеонаблюдения являются:
- невозможность получения контрастных изображений объектов и (или) участков подстилающей поверхности, отличающихся от основного типа подстилающей поверхности величиной альбедо в видимом диапазоне, в случае, если все они характеризуются одинаковыми значениями температуры и одинаковыми излучательными способностями в длинноволновом инфракрасном диапазоне;
- возможность получения только монохромных или псевдоцветовых изображений объектов и подстилающей поверхности, что существенно затрудняет, а иногда делает невозможным их дешифрирование (в случае отсутствия базы эталонных изображений искомых объектов или отсутствия достаточного опыта у оператора).
Наиболее близким к заявляемому техническому решению является способ аэрофотосъемки подстилающей поверхности в условиях недостаточной освещенности (ночью) с помощью БВС семейства «Птеро» (Валиев А.В. Опыт применения БЛА «Птеро-Е» для поиска мест аварии на ЛЭП / А.В. Валиев // Кабель-news. - 2009. - №11. - С. 20-22.; Валиев А. Возможности диагностики состояния ВЛ с использованием беспилотной авиационной системы Птеро-G0 / А. Валиев // ЭЛЕКТРОЭНЕРГИЯ. Передача и распределение. - 2015. - №3. - С. 72-75.; Зинченко О.Н. Беспилотный летательный аппарат: применение в целях аэрофотосъемки для картографирования / О.Н. Зинченко. // (www.racurs.ru/www_download/articles/UAV_1.pdf)), заключающийся в том, что дополнительно к основной нагрузке (цифровой фотокамере) БВС оснащается фотовспышкой, работа которой синхронизирована с электронным затвором цифровой фотокамеры.
Недостатки данного способа аэрофотосъемки заключаются в:
- необходимости поиска компромисса между высотой полета БВС, зависящей от мощности фотовспышки (определяемой достаточной для фотосъемки величиной освещенности подстилающей поверхности) и потенциально полезным полетным временем БВС, зависящим от величины потребляемой энергии фотовспышкой от бортового источника питания (аккумуляторной батареи), так как:
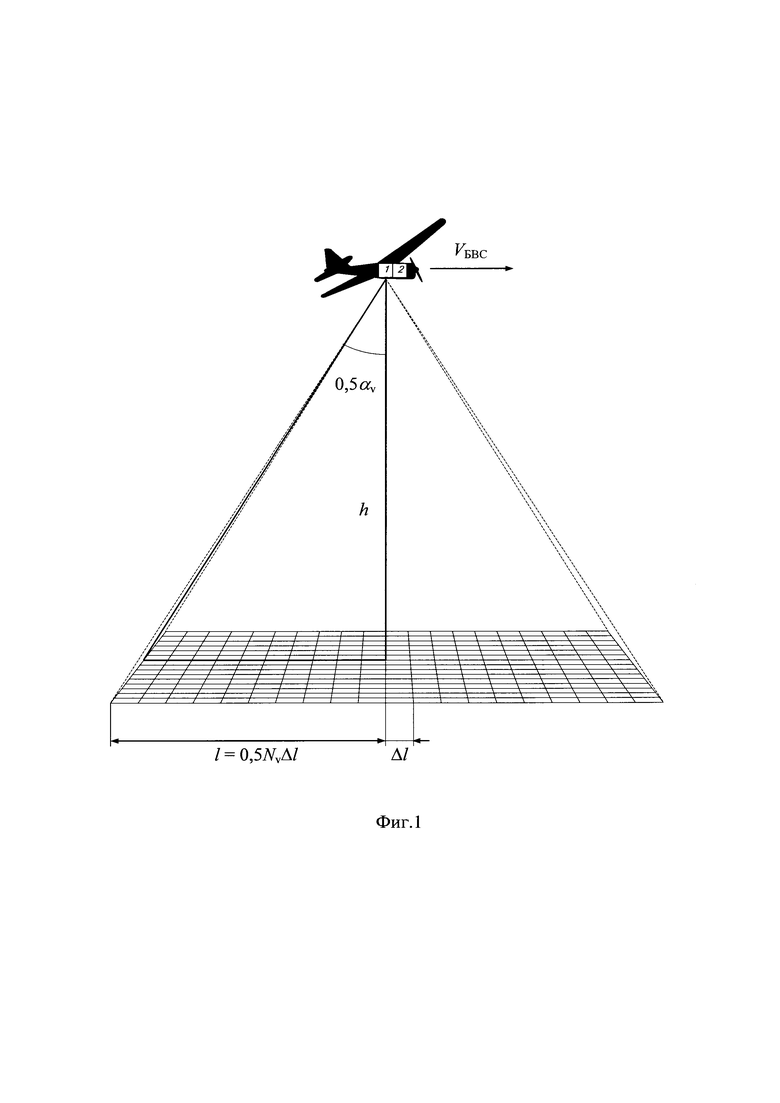
а) малые высоты полета БВС приводят к появлению «смазов» на фотоснимках, делая их непригодными для поиска изображений малоразмерных объектов или неоднородностей подстилающей поверхности ввиду того, что диапазон возможных скоростей полета БВС характеризуется некоторым минимальным значением, при котором еще возможен стабильный, управляемый полет. Для получения «несмазанных» фотоснимков подстилающей поверхности при съемке с БВС (фиг. 1) перемещение поля зрения фотокамеры за время экспонирования не должно превышать средней линейной величины протяженности элементарного участка подстилающей поверхности в центре кадра  , то есть должно выполняться условие:
, то есть должно выполняться условие:

где VБВС - скорость полета БВС;
tэ - время экспонирования фотокамеры;
 - протяженность участка подстилающей поверхности (в направлении полета БВС), изображение которого формируется на половине кадра матрицы;
- протяженность участка подстилающей поверхности (в направлении полета БВС), изображение которого формируется на половине кадра матрицы;
Nv - размерность матрицы фотокамеры (в направлении полета БВС);
h - высота полета БВС;
- протяженность элементарного участка подстилающей поверхности (в направлении полета БВС), изображение которого формируется одним субпикселем матрицы фотокамеры;
αv - величина углового поля зрения фотокамеры (в направлении полета БВС);
б) исходя из выражения для оценки величины энергетической освещенности подстилающей поверхности Eпп, создаваемой размещенной на борту БВС фотовспышкой:

где Iвс=Φвс/Ω - сила света, создаваемая импульсной лампой фотовспышки;
h - высота полета БВС;
Φвс=Qвс/tвс - световой поток;
Ω=2π(1-cos 0,5α) - телесный угол, образованный вращением плоского угла α, в котором распространяется световой поток от вспышки;
Qвс - энергии вспышки, создаваемая импульсной лампой фотовспышки;
tвс - длительность вспышки,
можно сделать вывод, что увеличение высоты полета БВС от некоторого значения, при котором фотовспышкой создается величина освещенности подстилающей поверхности, достаточная для фотосъемки, например, в 2 раза, ведет к необходимости увеличения энергии фотовспышки в 4 раза. Вследствие этого возрастает величина потребляемой фотовспышкой энергии от бортового источника питания (аккумуляторной батареи), чтобы обеспечить величину освещенности подстилающей поверхности, достаточную для фотосъемки. Следовательно, потенциально полезное полетное время БВС уменьшится ввиду более быстрого разряда аккумуляторной батареи;
- относительно малом расстоянии между оптическими системами цифровой фотокамеры и фотовспышки (определяемом геометрическими размерами БВС и особенностями их конструкции), что приводит к:
а) практически полному отсутствию на фотоснимках теней от объектов, имеющих незначительное превышение над уровнем подстилающей поверхности, затрудняющему обнаружение изображений объектов с камуфлированной раскраской (при условии совпадения величин альбедо объектов и подстилающей поверхности в видимом диапазоне);
б) возможности возникновения засветки приемника излучения (матрицы) цифровой фотокамеры отраженным в обратном направлении излучением фотовспышки вследствие его рассеяния на аэрозолях и гидрометеорах;
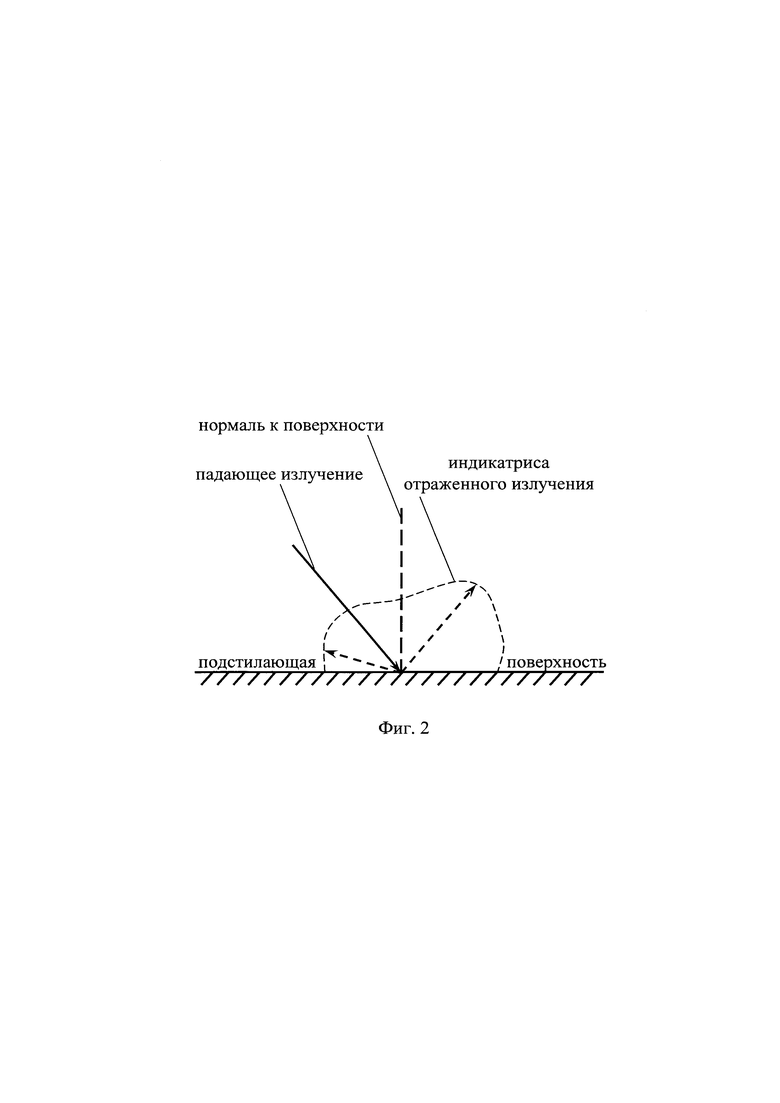
- возможности его использования, в основном, при проведении плановой аэрофотосъемки, обусловленной тем, что большинство подстилающих поверхностей характеризуются квазиортотропным характером отражения (фиг. 2) (Тимофеев Ю.М., Васильев А.В. Теоретические основы атмосферной оптики [Текст] / Тимофеев Ю.М., Васильев А.В. - СПб.: Наука, 2003. - 474 с. С. 248), так как при проведении перспективной аэрофотосъемки большая часть падающего излучения переотражается не в направлении фотокамеры: следовательно, при прочих равных условиях величина высоты, с которой получены фотоснимки при плановой аэрофотосъемке, будет превосходить величину наклонной дальности, при которой могут быть получены фотоснимки такого же качества при перспективной аэрофотосъемке.
Задачей, на решение которой направлено заявляемое изобретение, является разработка свободного от указанных недостатков способа аэрофотосъемки наземных объектов в условиях недостаточной освещенности с помощью БВС.
Техническим результатом, который достигается при решении данной задачи, является: возможность осуществления аэрофотосъемки наземных объектов с больших, чем у прототипа (100-150 м), высот; увеличение продолжительности потенциально полезного полетного времени БВС, осуществляющего аэрофотосъемку в условиях недостаточной видимости (ночью); повышение достоверности дешифрирования фотоснимков за счет использования демаскирующих признаков объектов - теней; увеличение наклонной дальности перспективной аэрофотосъемки, при которой могут быть получены фотоснимки такого же качества, как и при плановой аэрофотосъемке.
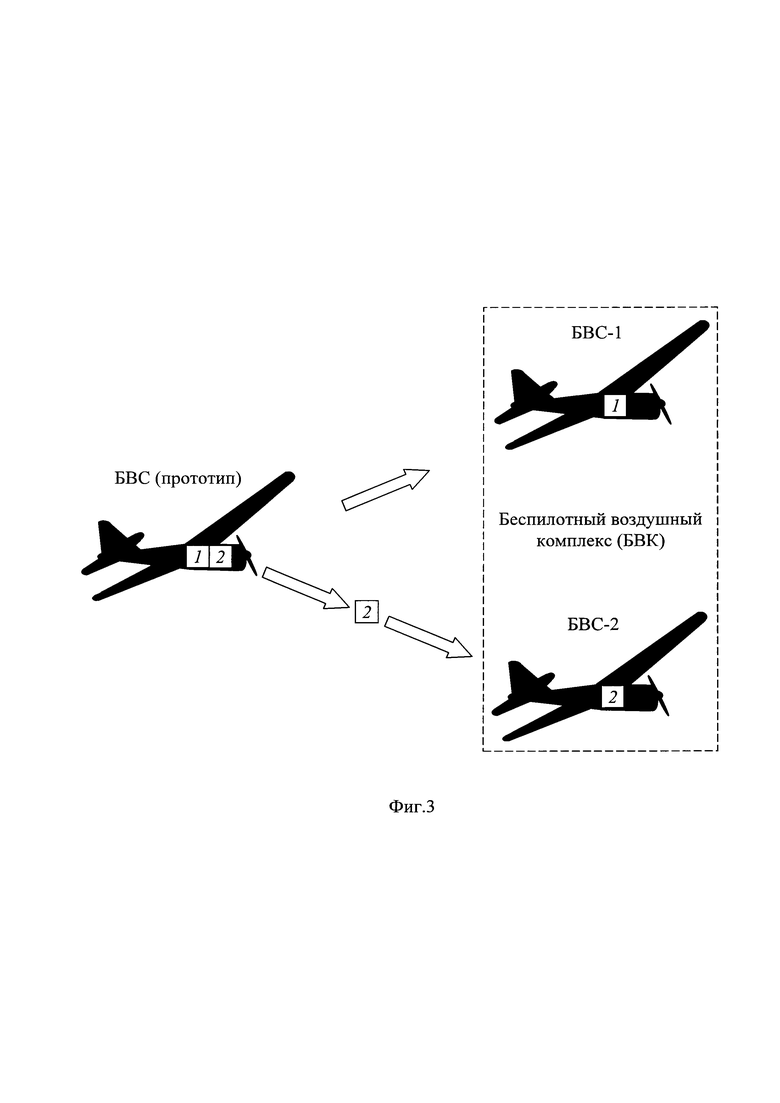
Данная задача решается за счет того, что часть полезной нагрузки БВС (прототипа), включающую в себя цифровую фотокамеру 1 и фотовспышку 2, разделяют и размешают (фиг. 3):
- на БВС-1 - цифровую фотокамеру 1;
- на БВС-2 - фотовспышку 2,
в результате чего получают беспилотный воздушный комплекс (БВК), включающий в себя два БВС с размещенными на их бортах разнородными нагрузками, совместное использование которых обеспечивает проведение аэрофотосъемки наземных объектов в условиях недостаточной освещенности (ночью).
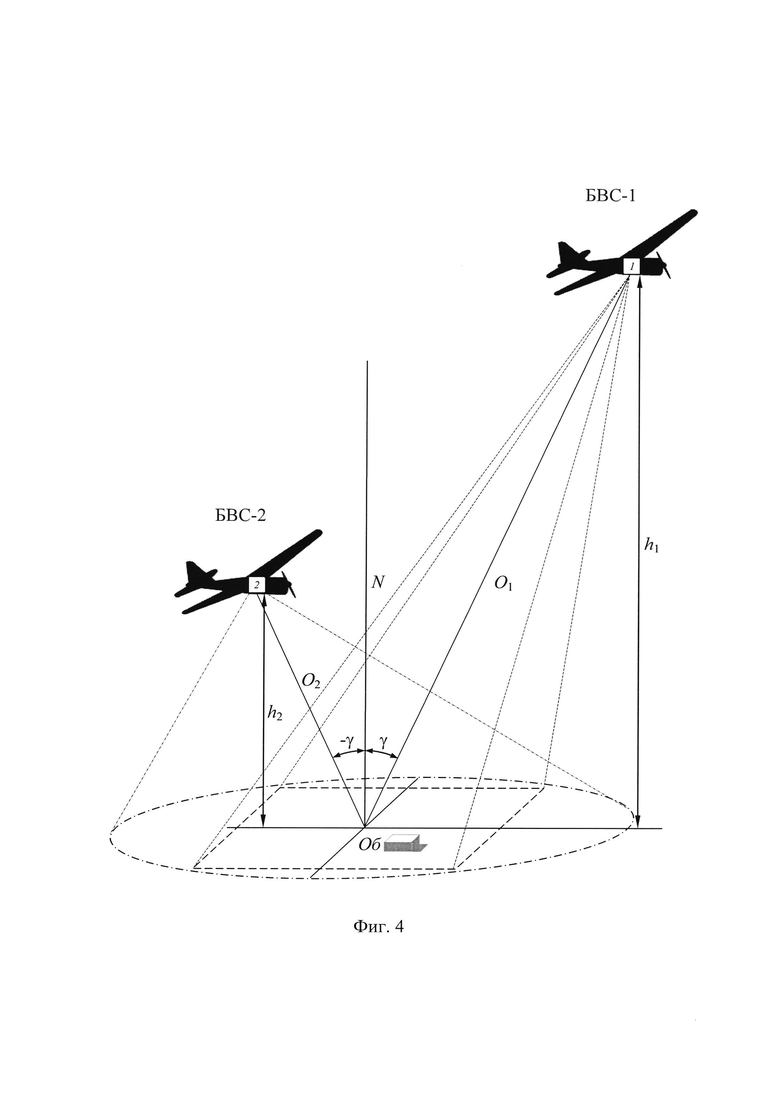
Принцип работы изобретения (фиг. 4).
Задают высоту полета БВС-1 h1, исключающую появление «смазов» на фотоснимках. Задают высоту полета БВС-2 h2, обеспечивающую создание фотовспышкой необходимый для аэрофотосъемки съемки уровень освещенности подстилающей поверхности (с учетом величины альбедо подстилающей поверхности и планируемой высоты полета БВС-1 h1).
При этом величина h1 может существенно превосходить величину h2, так как при выполнении условия существенного превосходства значением высоты полета h1 значения фокусного расстояние объектива ƒ':

справедливо выражение, связывающее освещенность в плоскости матрицы цифровой камеры Ем с величиной освещенности подстилающей поверхности Епп (Князев М.Г., Бондаренко А.В., Докучаев И.В. Расчет пороговых значений потока излучения и освещенности для ПЗС матриц Kodak KAI-1003M, Kodak KAI-1020 и Philips FTF3020M / М.Г. Князев, А.В. Бондаренко, И.В. Докучаев // (www.rastr.net/Download/Doc/KAI1003_KAI1020_FTF3020_v2.pdf)):

где τатм - коэффициент пропускания атмосферы на дистанции наблюдения h1,
τоб - коэффициент пропускания объектива цифровой камеры;
ρпп - альбедо подстилающей поверхности;
k - диафрагменное число объектива цифровой камеры,
из которого следует, что освещенность в плоскости матрицы цифровой камеры Ем не зависит от величины h1 - высоты полета БВС-1.
С помощью системы управления БВК в полете задают такое взаимное расположение БВС-1 и БВС-2 в пространстве, при котором обеспечивается их нахождение в одной плоскости, проходящей через оптическую ось цифровой фотокамеры (O1), оптическую ось фотовспышки (O2) и нормаль N к подстилающей поверхности в точке пересечения этих осей, а также обеспечивают синхронизацию работы затвора цифровой фотокамеры и фотовспышки.
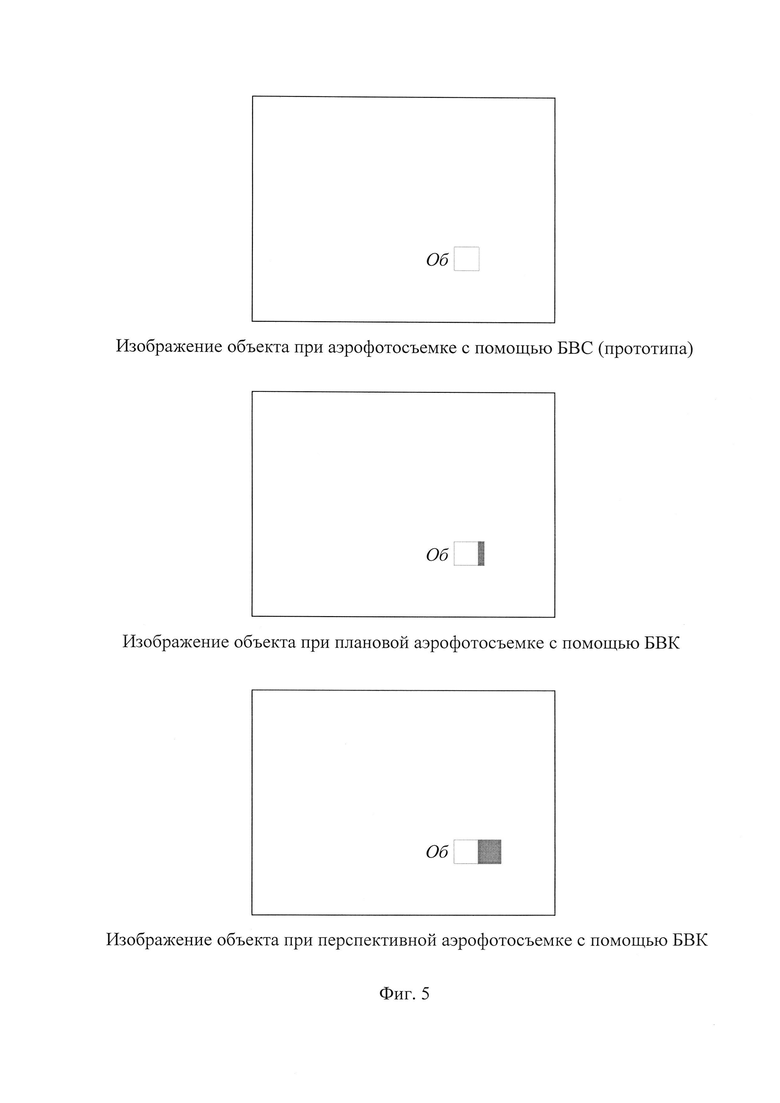
Величины углов наклона оптических осей цифровой фотокамеры (γ) и фотовспышки (-γ) относительно планеров, одинаковые по абсолютной величине, устанавливают перед запуском БВК или задают в процессе полета с помощью системы управления нагрузками БВК. При малых величинах углов наклона оптических осей цифровой фотокамеры (γ) и фотовспышки (-γ) осуществляют плановую аэрофотосъемку, при больших - перспективную: в обоих случаях на полученных фотоснимках присутствует изображение тени объекта (Об) (фиг. 5).
Таким образом, использование данного способа аэрофотосъемки наземных объектов с помощью БВК в условиях недостаточной освещенности (ночью) позволяет:
- сохранить продолжительность потенциально полезного полетного времени БВС с цифровой фотокамерой (БВС-1);
- увеличить высоту полета, с которой проводится фотосъемка;
- повысить достоверность дешифрирования фотоснимков за счет использования демаскирующих признаков объектов - теней объектов с камуфлированной раскраской (при условии совпадения в видимом диапазоне величин альбедо объектов и подстилающей поверхности);
- избежать возможности возникновения засветки приемника излучения (матрицы) цифровой фотокамеры отраженным в обратном направлении излучением фотовспышки вследствие его рассеяния на аэрозолях и гидрометеорах;
- применять его как для плановой, так и перспективной аэрофотосъемки.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| Способ мониторинга технического состояния объектов транспорта газа на основе геоинформационной системы | 2021 |
|
RU2780304C1 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
| Способ мониторинга состояния трассы магистрального трубопровода | 2018 |
|
RU2699940C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2741854C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ РОЗЫСКА РАНЕНЫХ | 2023 |
|
RU2823826C1 |
| Способ учета лосей и сибирской косули | 2022 |
|
RU2813766C2 |
| Универсальное мобильное устройство для выполнения аэрофотосъемки с применением различных пилотируемых воздушных средств | 2021 |
|
RU2795778C1 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2004 |
|
RU2264637C1 |
Изобретение относится к устройствам для получения изображений, специально предназначенным для фотографической съемки местности. Заявленный способ аэрофотосъемки наземных объектов в условиях недостаточной освещенности (ночью) с помощью беспилотных воздушных судов предусматривает использование беспилотного воздушного комплекса (БВК), включающего в себя два совершающих совместный полет беспилотных воздушных судна (БВС) с разнородными синхронно работающими нагрузками: БВС-1 - с цифровой фотокамерой; БВС-2 - с фотовспышкой. Технический результат заключается в обеспечении сохранения продолжительности потенциально полезного полетного времени БВС с цифровой фотокамерой (БВС-1), увеличении высоты полета, с которой проводится фотосъемка, в повышении достоверности дешифрирования фотоснимков за счет использования демаскирующих признаков объектов - теней объектов с камуфлированной раскраской (при условии совпадения в видимом диапазоне величин альбедо объектов и подстилающей поверхности), в избежании возможности возникновения засветки приемника излучения (матрицы) цифровой фотокамеры отраженным в обратном направлении излучением фотовспышки, вследствие его рассеяния на аэрозолях и гидрометеорах, в обеспечении возможности применении его как для плановой, так и перспективной аэрофотосъемки. 5 ил.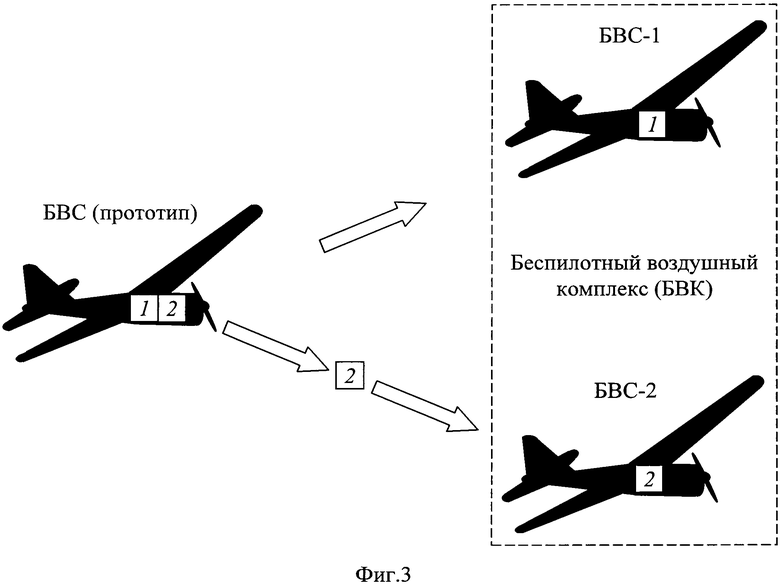
Способ аэрофотосъемки наземных объектов в условиях недостаточной освещенности (ночью) с помощью беспилотных воздушных судов, отличающийся тем, что предусматривает использование беспилотного воздушного комплекса (БВК), включающего в себя два совершающих совместный полет беспилотных воздушных судна (БВС) с разнородными синхронно работающими нагрузками: БВС-1 - с цифровой фотокамерой; БВС-2 - с фотовспышкой.
| CN 105973203 A, 28.09.2016 | |||
| СИСТЕМЫ И СПОСОБЫ ЗАХВАТА ИЗОБРАЖЕНИЙ БОЛЬШОЙ ПЛОЩАДИ ПО ЧАСТЯМ, ВКЛЮЧАЮЩИЕ В СЕБЯ КАСКАДНЫЕ КАМЕРЫ И/ИЛИ КАЛИБРОВОЧНЫЕ ПРИЗНАКИ | 2010 |
|
RU2562707C2 |
| Раздвижная обувная колодка | 1958 |
|
SU121055A1 |
| Приспособление для съемки тетрадей с проволокошвейной машины | 1938 |
|
SU54804A1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОВОЙ МОДЕЛИ РЕЛЬЕФА И/ИЛИ ОРТОФОТОПЛАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2216711C1 |

