ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к области авиационных систем, а именно беспилотным авиационным системам и может быть использована для проведения аэрофотосъемки или других видов авиационных работ в режиме реального времени.
УРОВЕНЬ ТЕХНИКИ
Известен КОМПЛЕКС ВЗЛЕТА, ПИЛОТИРОВАНИЯ И ПОСАДКИ АВТОМАТИЗИРОВАННЫХ ВОЗДУШНЫХ СУДОВ (патент на изобретение RU 2376203), помимо ABC, входят один или несколько пультов дистанционного управления командира, один или несколько аэродромов и один или несколько пультов дистанционного управления полезной нагрузкой, причем все они объединяются единым информационным полем. Может присутствовать авиадиспетчерская служба с системой связи, включающей аппаратуру управления воздушным движением. В качестве полезной нагрузки могут применяться фото - и видеокамеры, контейнеры с лекарствами, почтовые отправления, доставляемые адресату; средства организации мобильных сетей связи с удаленным объектом; датчики засоренности или задымленности атмосферы и др.
Недостатком известной системы является ограниченная грузоподъемность.
Известна МНОГОФУНКЦИОНАЛЬНАЯ БПЛА «КУГУАР», Россия [https://avia.pro/blog/kuguar-tehnicheskie-harakteristiki-foto]. Силовая часть аппарата «Кугуар» представлена одним поршневым двигателем внутреннего сгорания, автономность полета БПЛА составляет 4 ч. Аппарат предназначен для дистанционного мониторинга местности в зоне до 70 км в любое время суток в режиме времени близком к реальному. Ретрансляция данных - на расстояние до 70 км. Летательный аппарат не оборудован собственной системой шасси, запуск его осуществляется при помощи разгонной катапульты.
Недостатком известной системы является ограниченное время полета БПЛА.
Известна МАЛОГАБАРИТНАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА (патент на полезную модель RU 127717), включающая наземную станцию управления, бортовые и наземные средства радиосвязи, навигации и управления полетом и несущий полезную нагрузку разборный беспилотный летательный аппарат, содержащий фюзеляж цилиндрической формы, в носовой части которого размещена полезная нагрузка, в задней части - двигатель с толкающим винтом, и крыло, имеющее трапециевидную форму и состоящее из двух частей, левой и правой, прикрепленных к фюзеляжу разъемным соединением посредством узлов крепления и фиксации, отличающаяся тем, что крыло имеет прямую форму и выполнено со стреловидностью 3° по передней кромке, за крылом в задней части фюзеляжа закреплена хвостовая балка, несущая Т-образное хвостовое оперение, причем горизонтальное оперение установлено под углом -2° относительно горизонтальной строительной плоскости самолета с возможностью отсоединения при хранении и транспортировке, и на его задней кромке установлен руль высоты, а вертикальное оперение закреплено неподвижно.
Недостатком известной системы является ограниченная грузоподъемность.
Наиболее близкое техническое решение, выбранное в качестве прототипа, БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА КОМПАНИИ «ПТЕРО», Россия [http://ptero.ru/download/information/ptero_uas.pdf], включающая, силовую установку (одноцилиндровый четырехтактный двигатель внутреннего сгорания (ДВС), установленную на борт полезную нагрузку. Система способна нести полезную нагрузку общей массой до 10 кг. Время нахождения в воздухе со стандартной полезной нагрузкой массой 2 кг - до 8 ч, за это время аппарат может преодолеть до 800 км.
Недостатком известной системы является ограниченная грузоподъемность и продолжительность полета.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Техническим результатом является увеличение грузоподъемности беспилотного воздушного судна при одновременном увеличении продолжительности полета, что в свою очередь позволяет проводить дистанционное зондирование земли, аэрофотосъемку, мультиспектральную, тепловизионную, магнитометрическую, гравитационную, а также другие виды авиационных работ (доставку грузов, мониторинг) на больших территориях и протяженных объектах.
Технический результат достигается следующим образом. Разработана беспилотная авиационная система, состоящая из наземной станции управления; пусковой установки; беспилотного воздушного судна, включающего силовую установку на базе двигателя внутреннего сгорания, оснащенное полезной нагрузкой, бортовые и наземные средства радиосвязи, навигации и управления полетом,
по изобретению,
беспилотное воздушное судно, содержащее носовую, среднюю и хвостовую части,
носовая часть оснащена стабилизатором,
в средней части, в состав беспилотного воздушного судна, введены надирный фотоаппарат высокого разрешения, тепловизор, мультиспектральная камера, бокс для грузов,
хвостовая часть содержит силовую установку, оснащенную виброгасящей моторамой и стартер-генератором,
виброгасящая моторама выполнена с возможностью крепления на фюзеляже,
стартер-генератор размещен на валу двигателя внутреннего сгорания,
Беспилотное воздушное судно выполнено по аэродинамической схеме «утка».
Двигатель внутреннего сгорания объемом 40 см3 и мощностью 3,7 л.с.
Беспилотное воздушное судно выполнено с возможностью выполнения вертикального взлета и посадки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сущность изобретения поясняется чертежами, где
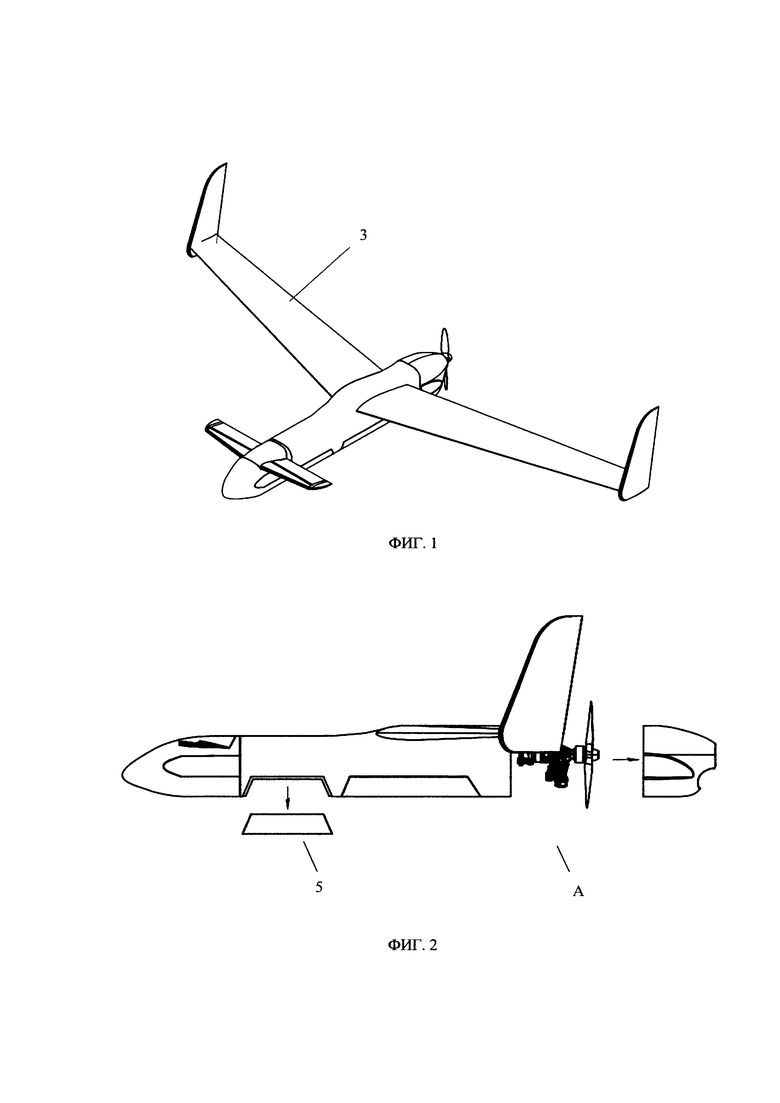
на фиг. 1 представлен общий вид беспилотного воздушного судна;
на фиг. 2 представлен вид сбоку;
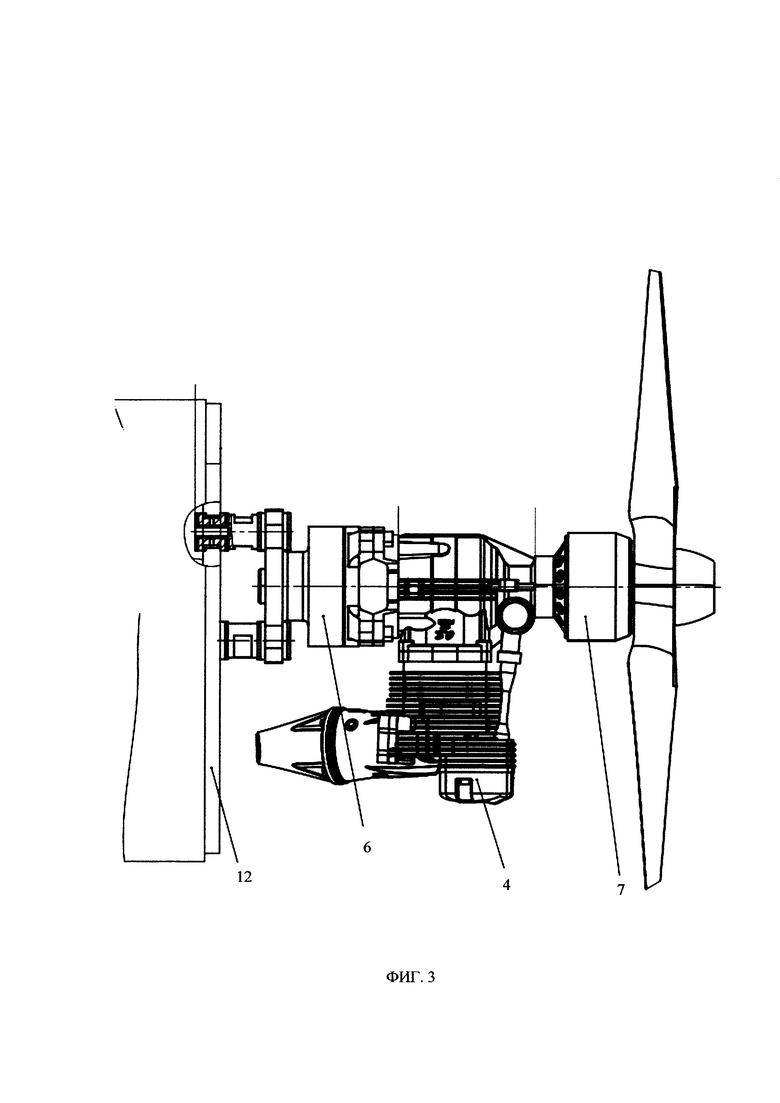
на фиг. 3 представлен хвостовой участок в разрезе.
Беспилотная авиационная система, состоит из: наземной станции управления - 1 (на фиг. не представлена); пусковой установки - 2 (на фиг. не представлена); беспилотного воздушного судна - 3, включающего силовую установку - 4 на базе двигателя внутреннего сгорания (ДВС), оснащенное полезной нагрузкой - 5. Силовая установка 4 оснащена виброгасящей моторамой - 6 и стартер-генератором - 7. В состав беспилотного воздушного судна 3 введены надирный фотоаппарат - 8 высокого разрешения (блок полезной нагрузки), тепловизор - 9 (блок полезной нагрузки), мультиспектральная камера - 10 (блок полезной нагрузки), бокс для грузов - 11, шпангоут - 12.
Вал ДВС размещен внутри статора стартер-генератора.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Беспилотная авиационная система (условное название ДИАМ-20) работает следующим образом.
Беспилотная авиационная система в транспортном положении располагается в двух контейнерах.
Первый контейнер с разборной пусковой установкой. Для разгона используется эластичный резиновый жгут.
Второй контейнер предназначен для БВС.
Для запуска БВС нужна не подготовленная инженерная площадка размером 100×100 м. Не допускается наличие на площадки деревьев, столбов линии электропередач, высоких строений. Не допускается наличие высоких предметов высотой более 20 м на удалении 100 м от места старта
Взлет и посадка производиться строго против ветра. Осуществляется сбор пусковой установки. Определяется направления взлета в зависимости от направления ветра.
Производиться сборка БВС, пристыковываются левая и правая консоль, стабилизатор, кили устанавливаются на концах консолей. Производиться заправка БВС горючим (бензиновая масляная смесь). Заправка горючим производиться при помощи заправочной канистры в специальную заправочную горловину, расположенную на фюзеляже.
Производиться включение БВС посредством вставного ключа. После включения БВС происходит автоматическое подключение всех систем БВС (навигационной системы, полезной нагрузки, системы воздушных сигналов (СВС), системы электропитания, связи, аварийного маяка).
Подключается БВС к наземной станции управления через радиоканал. На наземной станции управления формируется полетного задания.
Полетное задание в зависимости от задач содержит следующие обязательные элементы:
- Взлет. Набор высоты после с хода с пусковой установки до 100 м, переход на автоматический полет.
- Точка ожидания или точка измерения ветра. В точке ожидания производиться полет по кругу в заданном интервале времени или в ожидании команды оператора. Точка измерения ветра, предназначена для измерения направления и определения скорости ветра перед началом маршрута.
- Перелет. Режим полета необходим для подлета к месту выполнения работ и возврату к месту посадки.
- Линейная АФС (аэрофотосъемка) предназначена для сьемки линейных объектов, такие как дороги, ЛЭП, береговая линия и т.д.
- Площадная АФС предназначена для аэрофотосъемки площадных объектов.
В зависимости от типа и вида полезной нагрузки при выполнении работ по АФС или ДДЗ устанавливается превышение полета над земной поверхности, продольное и поперечное перекрытие маршрутов полета.
Режим ручного векторного и ручного управления. Режим векторного управления позволяет оператору изменять направления полета и высоту, осуществлять посадку в горной местности. Режим ручного управления позволяет оператору изменять направления полета, высоту при отсутствии сигналов спутниковой навигации. Этот режим позволяет выйти из зоны подавления систем спутниковой навигации.
Посадка. Посадка выполняется против ветра. Режим посадка предназначен для плавного снижения высоты и скорости перед выпуском парашюта. Происходит снижение высоты с текущей до 120 м, последующей остановкой мотора, выбросом парашюта надувание амортизационной подушки. После приземление происходит автоматический отцеп парашюта для обеспечения безопасности БВС.
После приземление осуществляется съем информации с полезной нагрузки для последующей обработки.
Экспериментальные испытания позволили выявить следующие основные тактико-технические характеристики беспилотной авиационной системы:
Основные масса-габаритные характеристики:
Максимальная взлетная масса до 29 кг.
Размах крыла 3600-4000 мм.
Длина 2000 мм.
Масса полезной нагрузки 3-5 кг.
Скоростные характеристики:
Максимальная скорость полета 40 м/с (144 км/ч).
Крейсерская скорость полета 22-24 м/с (80-90 км/ч).
Тактические характеристики
Максимальная продолжительность полета 10 часов.
Максимальная дальность полета 800 км.
Максимальная высота полета 4000 м.
Режим взлета - с пусковой установки.
Режим посадки - на парашюте.
Ограничения на скорость ветра не более 15 м/с.
Температурный диапазон окружающей среды от - 30 до +60°С.
Предложенная беспилотная авиационная система позволяет увеличить грузоподъемность беспилотного воздушного судна при одновременном увеличении продолжительности полета, что в свою очередь позволяет проводить дистанционное зондирование земли, аэрофотосъемку, мультиспектральную, тепловизионную, магнитометрическую, гравитационную, а также другие виды авиационных работ (доставку грузов, мониторинг) на больших территориях и протяженных объектах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоцелевой комбинированный беспилотный летательный аппарат | 2024 |
|
RU2831435C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| Беспилотное воздушное судно-перехватчик | 2024 |
|
RU2840166C1 |
| БПЛА из унифицированных деталей и узлов, изготовленных методом литья под давлением, и способ его изготовления | 2023 |
|
RU2814641C1 |
| МАЛОГАБАРИТНАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2473455C2 |
| Воздушная транспортная система | 2021 |
|
RU2764036C1 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| КОМПЛЕКС СРЕДСТВ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2023 |
|
RU2813215C1 |
Беспилотная авиационная система содержит наземную станцию управления, пусковую установку. Беспилотное воздушное судно содержит фюзеляж c носовой, средней и хвостовой частями. Носовая часть содержит стабилизатор. Средняя часть содержит надирный фотоаппарат высокого разрешения, тепловизор, мультиспектральная камера, бокс для грузов, а хвостовая часть содержит силовую установку на базе двигателя внутреннего сгорания, виброгасящую мотораму, закрепленную на фюзеляже, стартер-генератор, размещенный на валу двигателя внутреннего сгорания. Обеспечивается увеличение грузоподъемности и продолжительности полета беспилотного воздушного судна. 3 з.п. ф-лы, 3 ил.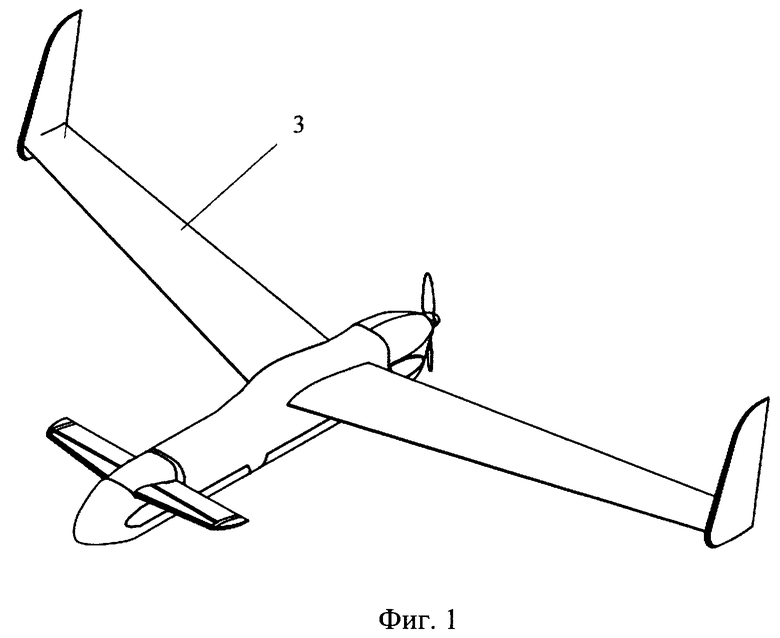
1. Беспилотная авиационная система, состоящая из наземной станции управления; пусковой установки; беспилотного воздушного судна, содержащего фюзеляж, силовую установку на базе двигателя внутреннего сгорания, оснащенного полезной нагрузкой, бортовые и наземные средства радиосвязи, навигации и управления полетом,
отличающаяся тем, что:
в беспилотном воздушном судне, содержащем носовую, среднюю и хвостовую части, носовая часть оснащена стабилизатором,
в средней части, в состав беспилотного воздушного судна, введены надирный фотоаппарат высокого разрешения, тепловизор, мультиспектральная камера, бокс для грузов,
хвостовая часть содержит силовую установку, оснащенную виброгасящей моторамой и стартер-генератором,
виброгасящая моторама выполнена с возможностью крепления на фюзеляже,
стартер-генератор размещен на валу двигателя внутреннего сгорания.
2. Беспилотная авиационная система по п. 1, отличающаяся тем, что беспилотное воздушное судно выполнено по аэродинамической схеме «утка».
3. Беспилотная авиационная система по п. 1, отличающаяся тем, что двигатель внутреннего сгорания выполнен объемом 40 см3 и мощностью 3,7 л.с.
4. Беспилотная авиационная система по п. 1, отличающаяся тем, что беспилотное воздушное судно выполнено с возможностью выполнения вертикального взлета и посадки.
| Эксцентриковая передача для преобразования вращательного движения в качательное | 1933 |
|
SU41295A1 |
| 0 |
|
SU162771A1 | |
| Устройство к карусельной кокильной машине для отливки металлических деталей | 1953 |
|
SU111835A1 |
| US 20200055596 A1, 20.02.2020 | |||
| CN 206394885 U, 11.08.2017 | |||
| RU 2018111761 A, 04.10.2019. | |||

