Предлагаемое изобретение относится к области аэрокосмической съемки, в частности для проведения аэрофотосъемных геодезических, фотограмметрических, земельно-кадастровых и картографических работ. Оно предназначено для получения планов участков местности, цифровой аэрофотосъемки, фотограмметрической обработки и вывода информации на цифровые и твердые носители для конечных пользователей.
Учитывая особенности аэросъемочного полета, используемый для этих целей самолет должен отвечать ряду специальных требований:
- обеспечивать устойчивый горизонтальный полет и разворот с одного курса на другой на высотах 250-5000 м, при этом иметь достаточный диапазон скоростей и необходимую дальность полета, обеспечивающую беспосадочное время работы не менее 2-4 часов.
- обладать хорошей продольной и путевой устойчивостью, в режиме установившегося горизонтального полета углы крена, тангажа и рысканья не превышать ±1 градуса, а время для ввода и вывода самолета в вираж должно быть минимальным;
- быть оснащенным высокоточным навигационным оборудованием, позволяющим выполнять автоматизированный полет по заданному маршруту с высокой точностью в разных геомагнитных и широтных условиях;
- иметь удобное, с хорошим обзором местности, место для штурмана, а также соответствующее место для установки аэрофотооборудования, работы бортинженера и хранения фотоматериала.
Очевидно, что предъявление тех или иных требований, а следовательно, использование того или иного носителя связано с масштабом съемки, с размером и расположением снимаемого района и требованиями к качеству аэрофотосъемочного материала.
В настоящее время для выполнения воздушного фотографирования применяют самолеты ТУ-134, АН-30, АН-2 и вертолеты К-26, МИ-8.
Аэрофотографирование земной поверхности с летательного аппарата, предусматривающего получение аэрофотоснимков для создания фотографических карт и планов, называют топографической аэрофотосъемкой. Оно выполняется на конкретном объекте, под которым понимают участок земной поверхности, подлежащий фотографированию. Границы объекта задаются номенклатурой топографических карт и совпадают с их рамками. Большие по площади объекты разбиваются на съемочные участки, подлежащие аэрофотосъемке за один-два вылета. Размеры наименьших съемочных участков зависят от масштаба создаваемой карты. Средняя длина съемочного участка (в км) определяется по формуле L=2m/1000, где m - знаменатель масштаба аэрофотосъемки. Наименьшие съемочные участки объединяются в один при условии, что размеры его не будут превышать средних размеров, а разность высот средних уровней, трапеций, входящих в участок, не превышать: для равнины 0,1Нф, для горной местности 0,2 Нф.
Если фотографирование выполняется при среднем положении оптической оси аэрофотоаппарата, то такая аэрофотосъемка называется плановой.
Элементы, характеризующие геометрические условия съемки, называются параметрами плановой топографической аэрофотосъемки.
Одним из основных параметров является перекрытие аэрофотоснимков, под которым понимают участки смежных снимков с изображением одного и того же участка местности, сфотографированного с разных точек. Различают продольное и поперечное перекрытие аэрофотоснимков. Продольное перекрытие Р - перекрытие смежных аэрофотоснимков одного маршрута в направлении полета летательного аппарата. Поперечное перекрытие Р - перекрытие аэрофотоснимков двух смежных маршрутов в направлении, перпендикулярном к направлению полета.
Для получения заданной величины перекрытий при выполнении аэрофотосъемки необходимо выдерживать соответствующий базис фотографирования.
Расстояние между двумя последовательными положениями носителя на одном маршруте в момент экспонирования называется продольным базисом фотографирования - Вф расстояние между двумя осями двух смежных маршрутов - поперечным базисом фотографирования - Ву.
Аэросъемочные маршруты прокладываются таким образом, чтобы отклонение осей маршрутов от заданного положения на карте не превышало на снимках определенных величин, а продольное перекрытие должно лежать в некоторых пределах. Поперечное перекрытие рассчитывается в зависимости от масштаба фотографирования и рельефа и не должно отклоняться от заданного.
Элементы, характеризующие траекторию полета носителя относительно сторон света и уровенной поверхностью, называют навигационными элементами полета. К ним относят угловые величины, характеризующие направление полета, и линейные, определяющие траекторию полета носителя в вертикальной и горизонтальной плоскостях. Одним из важных элементов, определяющих масштаб аэрофотоматериала, является высота полета. Под высотой полета понимают расстояние по вертикали от от уровня, взятого на начало отсчета до самолета. В зависимости от уровня начало отсчета в практике самолетовождения различают высоты полета: абсолютную истинную: относительную - Ни; барометрическую - Нб; фотографирования - Нф.
Одним из основных требований к топографической аэрофотосъемке является получение аэрофотоснимков, покрывающих эту территорию без пропусков и разрывов. Это требование является определяющим при выборе траектории полета носителя.
На аэрофотосъемочном маршруте самолет находится в режиме горизонтального, прямолинейного полета с выдерживанием постоянной скорости и высоты. Маневр носителя, связанный с переходом его с пройденного маршрута на очередной съемочный маршрут, называется заходом. Заход есть важный элемент траектории, так как от него зависит точность выхода носителя на ось очередного съемочного маршрута, а следовательно, и точность выдерживания поперечного перекрытия.
Применение спутниковых систем навигации в настоящее время является актуальным и перспективным направлением при выполнении аэросъемочных работ в различных отраслях народного хозяйства.
Известен способ магнитометрической разведки с помощью поискового аппарата (см. патент РФ №2075097, G01V 3/16). Этот способ включает в процесс движения поискового аппарата по заданному маршруту измерение горизонтальной и вертикальной составляющей геомагнитного поля, причем в ходе этого осуществляют предварительную подготовку, в процессе которой фиксируют измерительные оси магнитометра относительно строительных осей аппарата.
Известен способ магнитометрической разведки с помощью подвижного поискового аппарата (см. патент РФ №2075097, G01V 3/16), при котором осуществляют в процессе движения поискового аппарата по заданному маршруту измерение горизонтально и вертикальной составляющей геомагнитного поля. Недостатком его является низкая точность определения составляющих геомагнитного поля.
Из всех способов аналогичного назначения самым близким по технической сущности является тот, который известен как система ASCOT, принятый за прототип (см. газету «ARCREVIEW» 2002, №3), разработанная фирмой LH System для решения следующих задач:
1) Планирование съемки - выполняется в интерактивном режиме с использованием дигитайзера или мыши.
Планирование может осуществляться в географической или локальной системе координат с возможностью редактирования блока, программа оперирует понятиями блока дочек линий и использует достаточно сложный алгоритм оптимального расчета покрытия линиями блока. Результат работы программы - подготовленный к исполнению в автоматическом режиме план полета.
2) Выполнение полета. Производится по подготовленному плану. С контролем выполнения по внешним данным от GPS приемника и гироплатформы РАУЗО. Система полностью синхронизирована с камерой, навигационным приемником и гироплатформой для сбора навигационных во время съемки и аннотирования кадров (рис.4).
В систему, кроме бортового компьютера промышленного компьютера, входят также специальный дисплей для пилота и терминал оператора (рис.5). Информация, отображаемая пилоту, существенно облегчает «заход» на съемку и контроль полета в рамках определенного коридора движения.
Оператор на терминале «видит» и контролирует в реальном масштабе и времени весь процесс аэросъемки, текущую траекторию полета, отклонения от программы работы, азимут, скорость и количество отснятых кадров и т.д.
2) Анализ результатов может производиться сразу по нескольким полетам возможностями экспорта в графические форматы и дальнейшего использования в будущих съемках. Пользователь может проанализировать статистические параметры полета (вариации высоты, количества кадров, вариации масштаба съемки, вариации перекрытий и другие параметры).
3) Указанный способ позволяет осуществлять аэрофотосъемку местности, однако обладает определенными недостатками. Полет обеспечивается на реальном самолете с участием летчика, штурмана и оператора. Для развертывания и подготовки комплекса к работе требуется около трех часов, что затрудняет возможность перемещения на новые площадки и снижает производительность труда. Роль человеческого фактора при заходе на точки съемки существенно влияет на точность выполнения съемки, что ухудшает качество изображения при позиционировании и наложения снимков. Кроме того, большой расход горючего на реальном самолете увеличивает стоимость производимой аэросъемки. Таким образом, в прототипе не обеспечивается технический результат, выраженный в повышении производительности труда и повышении качества при аэрофотосъемке.
Указанный технический результат достигается тем, что в известном способе аэрофотосъемки, состоящем в том, что прокладывают маршрут, выполняют полет, выходят на район съемки, реализуют маршрутное задание, производят съемку полученные данные фиксируют, производят их обработку, прокладку маршрута выполняют путем ввода географических координат местности в бортовую ЭВМ, рассчитывают координаты точек съемки и интервалы времени съемки, реализацию маршрутного задания производят с учетом корректировки внешних факторов.
Известно устройство дистанционного зондирования подпочвенных слоев почвы (см.патент РФ №2154845, G01V 3/15, G01V 3/17). Оно содержит последовательно включенные синхронизатор, передатчик, антенный коммутатор и антенную систему, причем в него дополнительно введены два дифференцирующих блока, три квадратора, нормирующий блок, два перемножителя и два блока извлечения квадратного корня. Известно устройство дистанционного зондирования подпочвенных слоев (см. свид №1,684.770,001, VG01V 3/1671989). Указанное устройство использует обычную модель радиолокационного сигнала и метод его обработки, основанные на интегральном преобразовании Фурье. Однако такой метод усредняет и сглаживает отраженный сигнал в окрестностях точек разрыва, которые несут информацию о начале и конце отклика от цели, позволяют раздельное наблюдение откликов от различных неоднородностей, находящихся в подпочвенных слоях почвы. Интервал в районе точки разрыва для сверхширокополосного (сверхкороткого) радиолокационного сигнала сравним с длительностью самого сигнала, что приводит к заметным ошибкам и к ухудшению разрешающей способности по глубине. Из всех устройств наиболее близким к предлагаемому изобретению является аэрофотосъемочный комплекс, предлагаемый фирмой LH System, принятый за прототип (см.газету «ARCREVIEW», 2002, №3). Он состоит из следующих составных частей: Аэрофотокамера - RC 30 с объективами - 15.4 UAG-S или 30.4 и Гиростабилизированной платформой - PAV 30 (система управления фотокамерой);
Система управления и контроля съемки - ASCOT с самолетной GPS Антенной (система управления полетом);
Программное обеспечение пост-обработки данных - Flykin Suite+; Наземная опорная GPS станция (система наземного оборудования);
Однако данное устройство обладает большими габаритами и массой и имеет стоимость свыше 1 миллиона долларов. Кроме того, его развертывание и подготовка к работе занимает около 3 часов, в то время как для подготовки к аэрофотосъемке комплекса по предлагаемому изобретению необходимо 30 минут, а стоимость его составляет около 10000 долларов.
Таким образом, в нем не обеспечивается технический результат, выраженный в снижении стоимости комплекса и уменьшении времени для его подготовки к работе.
Указанный технически результат достигается тем, что в известном комплексе для реализации способа аэрофотосъемки, содержащем передатчики GPS, систему наземного оборудования, связанную через систему ввода данных с бортовой ЭВМ, которая связана с системой управления полетом и системой управления фотокамерой, установленной на гироплатформу, в систему наземного оборудования введен блок ввода информации, связанный с наземной ЭВМ, кроме того, в комплекс дополнительно введены связанные с бортовой ЭВМ блоки, причем блок памяти расчетных координат, блок памяти программ коррекции полета, блок памяти данных съемки, блок памяти программ полета введены в систему ввода данных, блок корректировки введен в систему управления полетом и связан с блоком управления двигателем, блоком управления высотой, блоком управления поворотом, блоком управления высотой, блоком управления поворотом, блок управления интервалом съемки введен в систему управления фотокамерой и связан с фотокамерой.
В процессе проведенного поиска по источникам научно-технической и патентной информации не было найдено способа и устройства, совокупность существенных признаков которых совпадала бы с совокупностью существенных признаков способа и устройства по предлагаемому изобретению с обеспечением заявленного технического результата. Таким образом, можно сделать вывод, что предлагаемое изобретение отвечает условию патентоспособности, так как представляет собой техническое решение задачи, являющееся новым, обладающее изобретательским уровнем и промышленной применимостью.
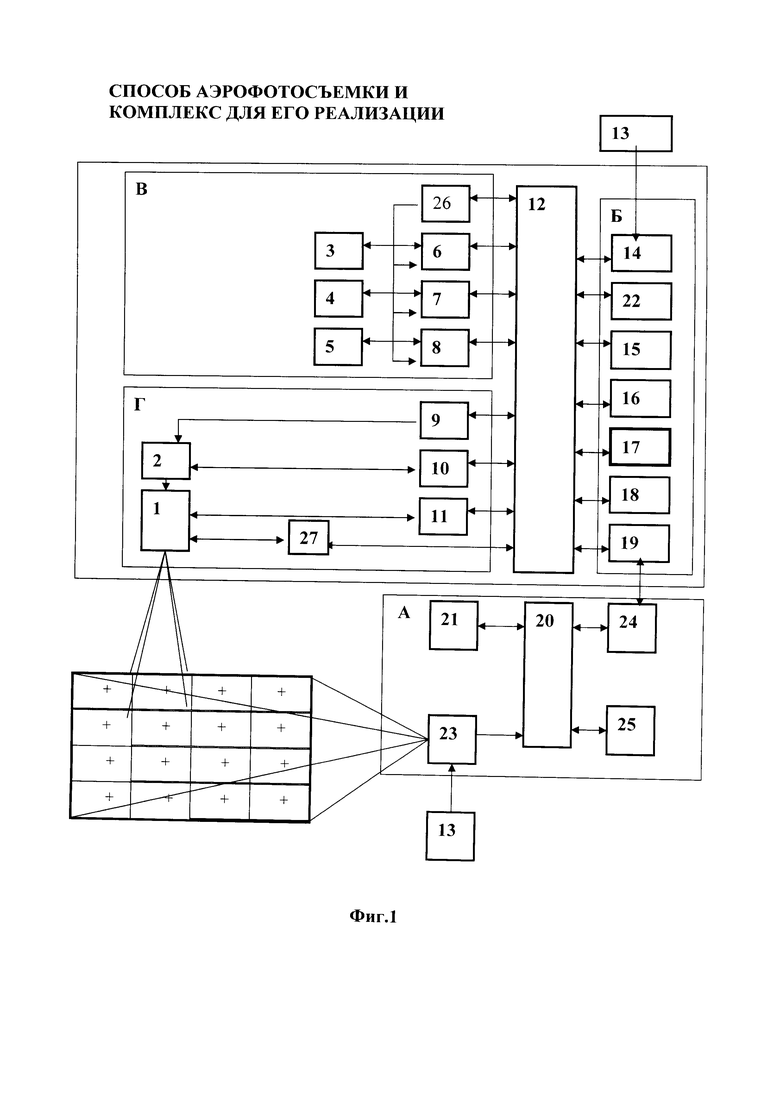
На фиг.1 показана блок-схема комплекса для реализации способа аэрофотосъемки.
На фиг.2 показан пример конкретного исполнения блока коррекции.
На фиг.3 показан пример конкретного исполнения блока управления интервалом съемки.
Комплекс по предлагаемому изобретению имеет следующий состав. Он содержит систему систему А (наземного оборудования), систему Б (ввода данных), систему В (управления полетом), систему Г (систему управления фотокамерой), бортовую ЭВМ и передатчики GPS (спутниковой)навигации). Система А содержит наземную ЭВМ 20, с которой связаны передатчик GPS 13 через приемник, GPS 23, с наземной ЭВМ 20 связаны также блок 25 ввода информации, наземное приемопередающее устройство 24 и транспортно-пусковая установка 21.
Система Б содержит связанные с бортовой ЭВМ 12 баровысотомер 22, блок 15 памяти расчетных координат, блок 16 памяти программ коррекции полета, блок 17 памяти данных съемки, блок 18 памяти программы полета, бортовое приемопередающее устройство 19, связанное с наземным приемопередающим устройством 24. С бортовой ЭВМ 12 связан также передатчик GPS 13 через приемник GPS 14 в составе системы Б. Система В содержит соответственно связанные с бортовой ЭВМ 12: двигатель 3 - через блок 6 управления двигателем, руль 4 поворота -через блок 7 управления поворотом, руль 5 высоты - через блок 8 управления высотой. Кроме того, с бортовой ЭВМ 12 связан блок 26 корректировки, выходы которого подключены соответственно, к блоку 6 управления двигателем, блоку 7 управления поворотом, блоку 8 управления высотой. Система Г содержит фотокамеру 1, установленную на гироплатформу 2. Фотокамера 1 соответственно, через блок 9 управления гироплатформой по координате X и блок 10 управления гироплатформой по координате У, связана с бортовой ЭВМ 12. От нее через блок 27 управления интервалом съемки идет сигнал на фотокамеру 1, от которой после съемки через блок 14 передачи изображения поступает сигнал для преобразования в бортовой ЭВМ 12, после чего данные фиксируются в блоке 17 памяти данных съемки. Комплекс по предлагаемому изобретению работает следующим образом. С помощью переносного наземного приемника GPS 23 измеряют четыре географические координаты участка местности (как указано на фиг.1) и вводят в наземную ЭВМ 20. В ней рассчитываются параметры программы полета летательного аппарата (ЛА);
Координаты маршрута, координаты точек съемки, интервалы времени между спуском затвора фотокамеры 1. Через блок 25 (выполненный виде клавиатуры) вручную вводят формулу расчета полета, сформулированную на основе полетного задания. Там задают число маршрутов, число кадров на маршруте, расчетное полетное время, интервалы съемки. Эти данные с помощью наземного приемопередающего устройства 24 поступают через бортовое приемопередающее устройство 19 в бортовую ЭВМ 12, где преобразуются в двоичные коды координат и заносятся в блок 15 памяти расчетных координат. Аналогичным образом данные программы полета в бортовой ЭВМ 12 преобразуются в двоичные коды и фиксируются в блоке 18 памяти программы полета. На основании данных из блока 15 памяти расчетных координат и блока 18 памяти полета с помощью бортовой ЭВМ 12 происходит формирование кодов коррекции в блоке 16 памяти программ коррекции полета. Затем эти данные поступают в блок 26 корректировки системы В управления полетом. По командам наземной ЭВМ 20 запускается двигатель 3 и транспортно-пусковая установка 21 отправляет ЛА в полет. На основе данных баровысотомера 22 и бортового приемника GPS 14 определяют текущие координаты ЛА и производят изменение параметров полета с помощью блока 26 корректировки, воздействующего на блок 6 управления двигателем, блок 7 управления высотой, блок 8 управления полетом. По сигналам от бортовой ЭВМ 12 с помощью блока 9 идет управление гироплатформой 2 по координате X с помощью блока 10 - по координате У. Соответственно, через блок 27 управления интервалом съемки обеспечивают срабатывание затвора фотокамеры 1 в расчетных точках полета.
От нее через блок 27 управления интервалом съемки идет сигнал на фотокамеру 1, от которой после съемки через блок 11 передачи изображения поступает сигнал для преобразования в бортовой ЭВМ 12, после чего данные фиксируются в блоке 17 памяти данных съемки. С этого блока после выполнения полета данные через бортовое приемопередающее устройство и наземное приемопередающее устройство 24 поступают на наземную ЭВМ20. В дальнейшем эти данные используются для создания ортофотоплана местности известными способами. Пример реализации данного комплекса показывает, что его стоимость составляет примерно 10000 долларов.
Способ по предлагаемому изобретению реализует следующим образом. Для применения комплекса для реализации аэрофотосъемки с использованием беспилотного ЛА должна быть сформулирована задача на его применение. Оно должно содержать формализованную координатную информацию и указание по графику работы для расчета комплекса.
Состав формализованной координатной информации для постановки задачи на применение комплекса:
- координаты стартовой позиции комплекса;
- высота полета беспилотного ЛА на маршруте к району картографирования и обратно;
- высота съемки района картографирования;
- размеры и ориентация района картографирования;
- коэффициент перекрытия фотоснимков;
- формализованная координатная информация предназначена для ввода в бортовую ЭВМ беспилотного ЛА. Эта информация служит для автоматического вывода беспилотного ЛА в район картографирования автоматического построения галсов, и управление беспилотного ЛА и его цифровым фотоаппаратом в районе картографирования, а также для возвращения к месту старта.
Указания по графику работы должны содержать разрешенные времена начала и окончания полета беспилотного ЛА. Продолжительность разрешенного интервала должна быть достаточна для выполнения поставленной задачи. Оценку для потребного для выполнения задачи времени можно получить с помощью программно-математического обеспечения по формализованной координатной информации и ожидаемым скорости и направлению ветра.
Требование к стартовой позиции.
Стартовая позиция для применения комплекса должна отвечать следующим требованиям:
- наличие свободного пространства не менее 200 метров для разгона беспилотного ЛА после старта при соблюдении условий пуска беспилотного ЛА против ветра.
- наличие ровной свободной горизонтальной площадки.
- Идеальными местами для размещения стартовой позиции являются придорожный луг или поле, свободное от посевов. В условиях средней полосы России проблемы с выбором места для стартовой позиции не возникают.
Развертывание комплекса
Развертывание комплекса проводят по прибытию комплекса на выбранную стартовую позицию. Развертывание комплекса считается завершенным, когда беспилотный ЛА готов к пуску. По практическим результатам время развертывания составляет примерно 30 минут.
Съемка района картографирования
При подлете беспилотного ЛА к району картографирования бортовая ЭВМ беспилотного ЛА на расчетной высоте обеспечивает полное покрытие заданного района картографирования фотоснимками с заданным коэффициентом перекрытия.
Для полного покрытия заданного района картографирования развороты выносятся за пределы района. Благодаря высокоточной навигации и автоматическому управлению беспилотного ЛА обеспечивается сплошная фотосъемка заданного района с тщательностью, не достижимой для пилотируемого ЛА. Таким образом обеспечивается аэрофотосъемка, для получения плана местности в масштабе M1:500, что трудно реализуемо при использовании других комплексов и летательных аппаратов.
Возвращение и посадка беспилотного ЛА
После выполнения фотосъемки заданного района бортовая ЭВМ переходит к управлению беспилотного ЛА с целью его возврата к точке старта.
Управление на маршруте возврата полностью идентично управлению на маршруте к району картографирования. Отличие заключается только в том, что вместо координат точки съемки бортовая ЭВМ использует координаты места старта.
При приближении беспилотного ЛА к стартовой позиции комплекса бортовая ЭВМ выдает команды на снижение беспилотного ЛА и выводит его на глиссанду снижения и приземляет.
Свертывание комплекса
Передача и использование первичной информации. Передачу первичной информации (отснятых цифровых фотоснимков и аннотируемой координатной информации) от беспилотного ЛА производят, как правило, в месте постоянной дислокации. Для передачи фотоснимков из запоминающего устройства беспилотного ЛА в ЭВМ используется универсальный последовательный интерфейс USB. При продолжительной работе комплекса и производстве большого числа полетов первичную информацию, доставляемую с беспилотного ЛА, сохраняют на съемных накопителях.
Каждый цифровой фотоснимок, сделанный с беспилотного ЛА, аннотируется координатами точки съмки и вектором путевой скорости по GPS, а также ориентацией оптической оси относительно местной вертикали фотоаппарата по тангажу и крену.
В качестве примеров конкретного исполнения можно указать следующее.
Фотоаппарат может быть использован фирмы Rolleimetric D30 (Германия). Летательный аппарат может быть типа дистанционно пилотируемого « Грант» фирмы «Новик» (Москва).
Для вновь вводимых блоков можно использовать комплектующие фирмы. Octagon System (США):
- блок корректировки
- блок управления интервалом съемки
- блок памяти расчетных координат
- блок памяти данных съемки
- блок памяти программы коррекции полета
- блок памяти программ полета.
Таким образом, как видно из описанного выше, именно совокупность существенных признаков способа по предлагаемому изобретению позволяет обеспечивать повышение производительности труда и повысить качество при аэрофотосъемке. Аналогично в процессе проведенных испытаний выяснилось, что совокупность существенных признаков устройства по предлагаемому изобретению обеспечивает снижение стоимости комплекса и уменьшение времени на его подготовку к работе. Кроме того, возможность использования в качестве летательного аппарата беспилотного летательного аппарата позволяет исключить субъективный фактор в полете, влияющий на точность захода на точки съемки, выполнение снимков и в дальнейшем на качество изображения и получаемый план местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| Универсальное мобильное устройство для выполнения аэрофотосъемки с применением различных пилотируемых воздушных средств | 2021 |
|
RU2795778C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
| Способ мониторинга технического состояния объектов транспорта газа на основе геоинформационной системы | 2021 |
|
RU2780304C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНТРОЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ ПРОСТРАНСТВЕННО-УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЁТА НА ТРАССАХ И ПРИАЭРОДРОМНЫХ ЗОНАХ ПРИ ЛЁТНЫХ ИСПЫТАНИЯХ ПИЛОТАЖНО-НАВИГАЦИОННОГО ОБОРУДОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584368C1 |
| МОДЕРНИЗИРОВАННАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ АЭРОФОТОСЪЕМКОЙ ДЛЯ ПИЛОТИРУЕМЫХ ВОЗДУШНЫХ СУДОВ (МБСУ АФС) | 2016 |
|
RU2646539C1 |
| Способ построения трехмерной модели местности вдоль полотна железнодорожного пути | 2020 |
|
RU2726256C1 |
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОБЪЕМОВ СЫПУЧИХ МАТЕРИАЛОВ НА ОТКРЫТЫХ СКЛАДАХ С ПРИМЕНЕНИЕМ ВОЗДУШНОГО ОПТИЧЕСКОГО СКАНИРОВАНИЯ С БЕСПИЛОТНЫХ АВИАЦИОННЫХ КОМПЛЕКСОВ | 2016 |
|
RU2646538C1 |

Изобретение относится к области аэрокосмической съемки, в частности для проведения аэрофотосъемных, геодезических, фотограмметрических, земельно-кадастровых и картографических работ. Технический результат - расширение функциональных возможностей. Для этого прокладку маршрута выполняют путем ввода географических координат местности в бортовую ЭВМ, рассчитывают координаты точек съемки и интервалы времени съемки, реализацию маршрутного задания производят с учетом корректировки внешних факторов. При этом введен блок ввода информации, связанный с наземной ЭВМ, кроме того, в комплекс дополнительно введены связанные с бортовой ЭВМ блоки, причем блок памяти расчетных координат, блок памяти коррекции полета, блок памяти данных съемки, блок программы полета введены в систему ввода данных, блок корректировки введен в систему управления полетом и связан с блоком управления двигателем, блоком управления высотой, блоком управления поворотом, блок управления интервалом съемки введен в систему управления фотокамерой. 3 ил.
Беспилотный мобильный комплекс, содержащий передатчики GPS, систему наземного оборудования, связанную через систему ввода данных с бортовой ЭВМ, которая связана с системой управления полетом и системой управления фотокамерой, установленной на гироплатформу, отличающийся тем, что в систему наземного оборудования введен блок ввода информации, связанный с наземной ЭВМ, кроме того, в комплекс дополнительно введены связанные с бортовой ЭВМ блоки, причем блок памяти расчетных координат, блок памяти программ коррекции полета, блок памяти данных съемки, блок памяти программы полета введены в систему ввода данных, блок корректировки введен в систему управления полетом и связан с блоком управления двигателем, блоком управления высотой, блоком управления поворотом, блок управления интервалом съемки введен в систему управления фотокамерой и связан с фотокамерой.
| Способ определения пространственных координат центров проектирования аэрофотоснимков | 1990 |
|
SU1739196A1 |
| Спосб изготовления напильников | 1958 |
|
SU123393A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ КАРТОГРАФИЧЕСКОГО ОТОБРАЖЕНИЯ ДВУХМЕРНЫХ РАСПРЕДЕЛЕНИЙ, ЗАДАННЫХ В ЦИФРОВОЙ ФОРМЕ | 2011 |
|
RU2484427C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |

