Изобретение относится к зарядному узлу, содержащему подвижный аппарат и базу зарядки аккумуляторной батареи подвижного аппарата, и находит свое применение, в частности, в области робототехники. Изобретение относится также к способу зарядки аккумуляторной батареи с применением такого узла.
Поскольку подвижный аппарат работает от батареи, он в определенный момент требует подзарядки своей батареи. Подвижным аппаратом может быть, например, робот-гуманоид. Под роботом-гуманоидом следует понимать робот, имеющий сходство с человеческим телом. Речь может идти о верхней части корпуса или только о шарнирной руке, заканчивающейся захватом, похожим на человеческую кисть. В настоящем изобретении верхняя часть корпуса робота похожа на верхнюю часть человеческого туловища. Робот-гуманоид может более или менее сложным. Он может контролировать свое равновесие статически и динамически и ходить на двух конечностях, возможно, в трех измерениях, или просто катиться на основании. Он может принимать сигналы из окружающего пространства (звуковые, визуальные, осязательные и т.д.) и реагировать путем одного или нескольких более или менее сложных поведений, а также взаимодействовать с другими роботами или людьми либо при помощи речи, либо при помощи жестов. Для современного поколения роботов-гуманоидов программисты могут создавать более или менее сложные сценарии, такие как последовательные события в отношении робота и/или действия, осуществляемые роботом. Эти действия могут быть обусловлены определенным поведением людей, которые взаимодействуют с роботом. Однако в этих роботах-гуманоидах первого поколения программирование приложения осуществляют в одном инструменте разработки, и каждое приложение требует запуска путем включения, которое приводит к наступлению события, предусмотренного в приложении.
В области гуманоидной робототехники существует потребность в роботе-гуманоиде, способном на «автономную жизнь», наподобие человека, который может вести себя определенным образом в зависимости от окружающей его среды.
Как правило, такой робот получает питание электрической энергией от аккумуляторной батареи или аккумуляторных батарей или просто от батареи или батарей. Речь идет о наборе электрических аккумуляторов, соединенных между собой таким образом, чтобы образовать электрический генератор необходимой емкости. Прежде всего, батарея предназначена для обеспечения силы тока и напряжения, необходимых для перемещения робота. Батарею можно также использовать для питания установленной на роботе электронной аппаратуры.
При этом в определенный момент необходимо производить подзарядку батареи. Как правило, робот, работающий от батареи, способен двигаться, пока батарея заряжена, и становится обездвиженным в конце ее заряда. Поэтому необходимо внешнее вмешательство, например, чтобы установить робот на базу зарядки батареи. Некоторые роботы могут возвращаться на свою зарядную базу автономно, однако иногда они испытывают трудность при подключении к своей зарядной базе либо по причине плохого позиционирования робота на базе, либо по причине плохих контактов между соединителями робота и зарядной базой. Кроме того, при подключении робота к своей зарядной базе иногда между электрическими соединителями робота и зарядной базой возникают электрические дуги, что может привести к повреждению робота и/или базы.
Изобретение призвано устранить все или часть вышеупомянутых проблем и предложить для этого Зарядный узел, содержащий подвижный аппарат и базу зарядки батареи подвижного аппарата, а также способ с применением такого узла, позволяющий любому подвижному аппарату, такому как робот, автономно производить зарядку.
В связи с этим объектом изобретения является зарядный узел, содержащий подвижный аппарат и зарядную базу, имеющую форму, соответствующую форме подвижного аппарата, и выполненную с возможностью установки на ней подвижного аппарата и зарядки батареи подвижного аппарата, содержащего по меньшей мере одно колесо, при этом база выполнена с возможностью подключения к электрическому источнику, отличающееся тем, что база содержит:
- приемную поверхность и цокольную плоскость, предназначенную для размещения на опорной плоскости, при этом приемная поверхность и цокольная плоскость базы образуют острый угол,
- полусферическую полость, выполненную в виде выемки в приемной поверхности и предназначенную для размещения в ней упомянутого по меньшей мере одного колеса,
- по меньшей мере один электрический соединитель, расположенный таким образом, чтобы обеспечивать соединение базы с батареей во время опускания упомянутого по меньшей мере одного колеса в полусферическую полость.
Согласно варианту выполнения, зарядная база дополнительно содержит соединитель присутствия подвижного аппарата на базе, выполненный с возможностью активации после соединения электрического соединителя и батареи.
Согласно варианту выполнения, зарядная база содержит первую контрформу, расположенную на пересечении между приемной поверхностью и цокольной плоскостью и предназначенную для образования упора для второго колеса аппарата.
Согласно другому варианту выполнения, зарядная база содержит направляющую, выполненную в приемной поверхности между пересечением приемной поверхности и цокольной плоскости и полостью, при этом направляющая предназначена для направления упомянутого по меньшей мере одного колеса в сторону полости.
Предпочтительно, направляющая выполнена с возможностью обеспечения центровки колеса вокруг главного направления направляющей, и по мере приближения к полости точность центровки повышается.
Согласно еще одному варианту выполнения, полость имеет центр и полюс, при этом ось Z, проходящая через центр и полюс, является по существу перпендикулярной к опорной плоскости, и база содержит выемку, проходящую через базу от полюса полости и по существу параллельно оси Z.
Предпочтительно соединитель содержит контакт, подвижный в направлении, по существу перпендикулярном к цокольной плоскости.
Предпочтительно база имеет контур, который может соответствовать формам подвижного аппарата.
Объектом изобретения является также способ зарядки с применением базы по одному из предыдущих пунктов формулы изобретения и аппарата, выполненного с возможностью подзарядки на базе, отличающийся тем, что содержит следующие этапы:
- подвижный аппарат поступательно перемещают по опорной поверхности,
- упомянутое по меньшей мере одно колесо устанавливают в полусферическую полость и одновременно устанавливают контакт между соединителем базы и батареей подвижного аппарата.
Предпочтительно способ зарядки содержит этап активации зарядки батареи, включающий в себя следующие этапы:
- проверяют присутствие подвижного аппарата на зарядной базе по нажатию на соединитель присутствия,
- измеряют напряжение на клеммах батареи и измеренное напряжение сравнивают с минимальным значением и с максимальным значением напряжения,
- измеряют внутреннее сопротивление батареи и сопротивление сравнивают с минимальным значением и с максимальным значением сопротивления.
Способ может дополнительно содержать этап установки второго колеса в положение упора в контрформу.
Способ может содержать предварительный этап направления по меньшей мере одного колеса в сторону полости при помощи направляющей.
Подвижный аппарат является, например, роботом. Этот робот имеет по меньшей мере одно колесо для обеспечения его перемещения по опорной плоскости.
В альтернативном варианте подвижный аппарат может быть аппаратом любого типа, имеющим по меньшей мере одно колесо.
Объектом изобретения является также робот-гуманоид, содержащий заявленную зарядную базу.
Изобретение и его другие преимущества будут более очевидны из нижеследующего подробного описания варианта выполнения, представленного в качестве примера, со ссылками на прилагаемые чертежи, на которых:
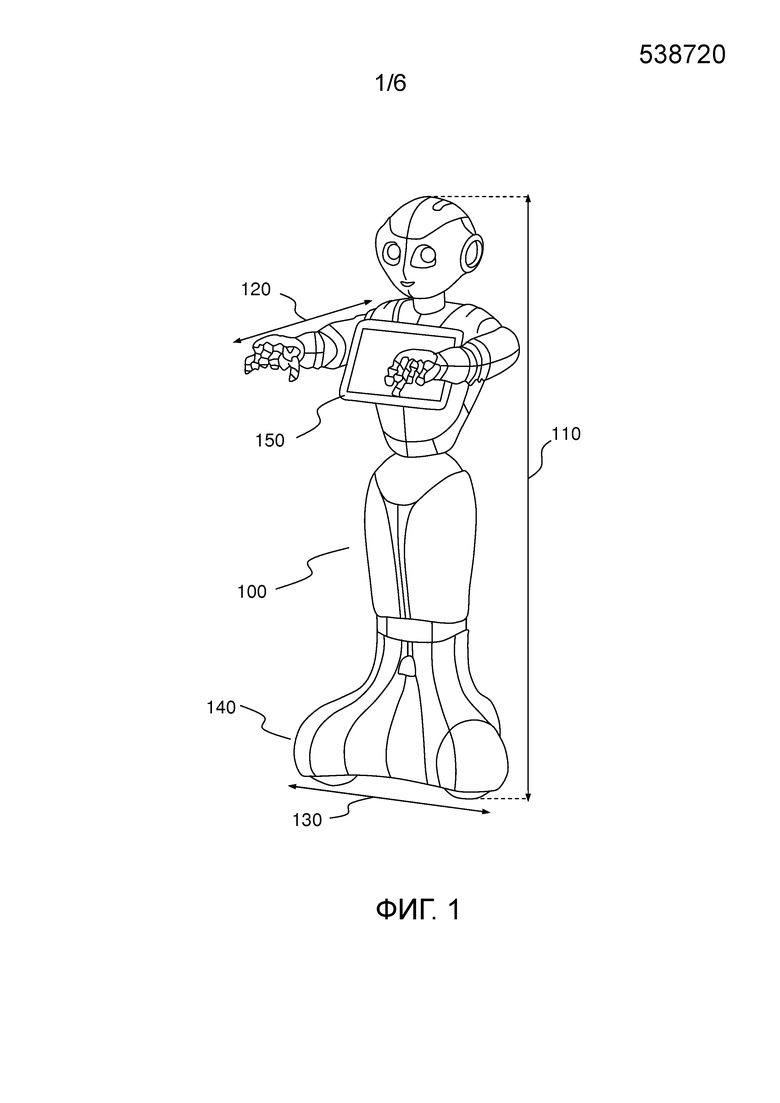
Фиг. 1 - робот-гуманоид, выполненный с возможностью подзарядки на заявленной зарядной базе.
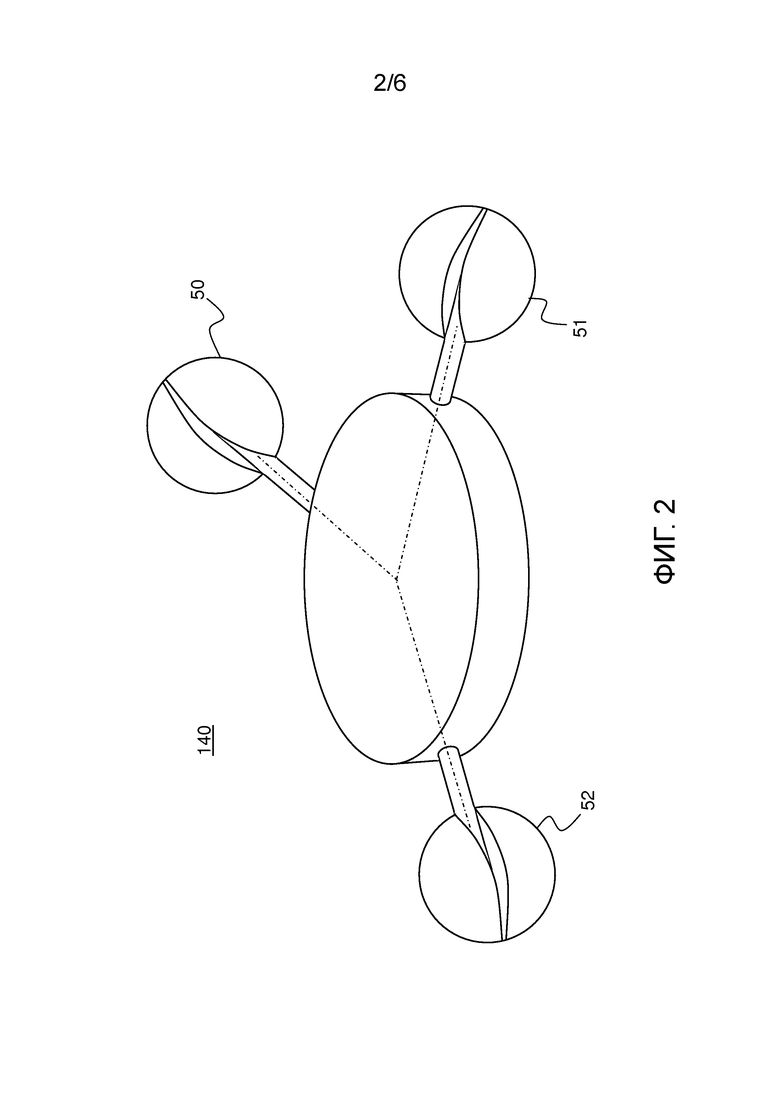
Фиг. 2 - пример цоколя, содержащего колеса, для робота-гуманоида, выполненного с возможностью подзарядки на заявленной зарядной базе.
Фиг. 3 - схематичный вид в разрезе заявленной зарядной базы.
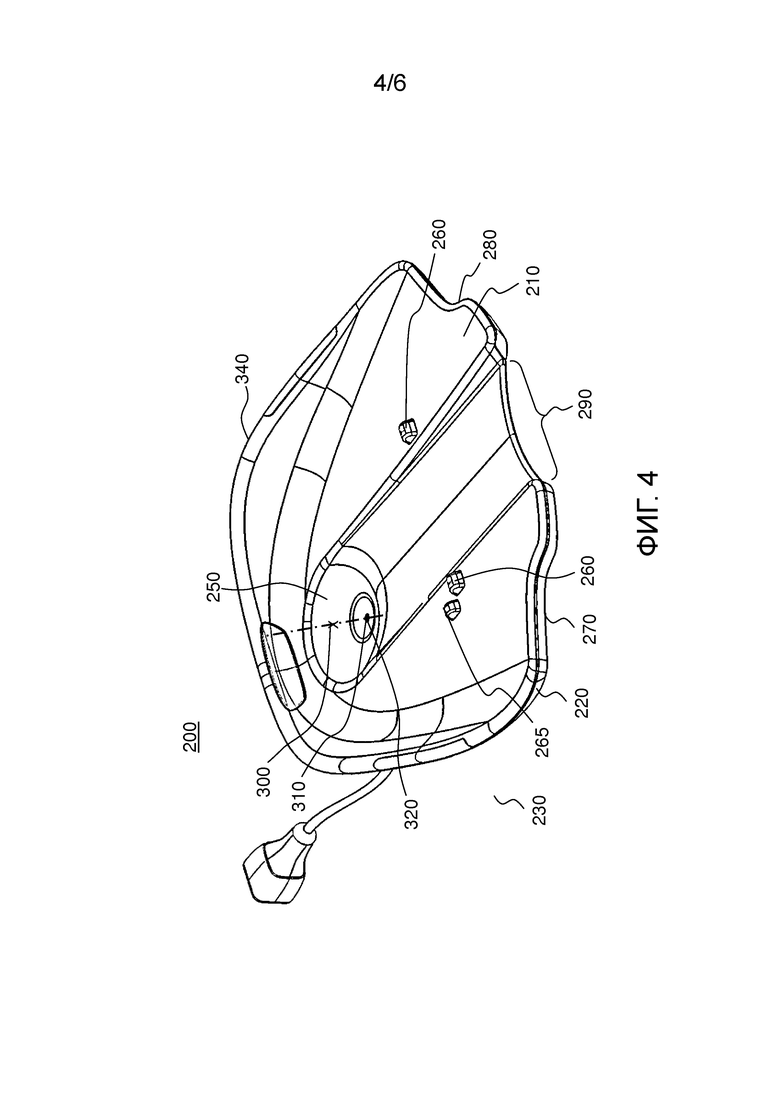
Фиг. 4 - вид заявленной зарядной базы.
Фиг. 5 - схема этапов заявленного способа зарядки.
Фиг. 6 - схема различных этапов, в ходе которых подвижный аппарат заезжает на заявленную зарядную базу.
Для большей ясности на различные фигурах одни и те же элементы имеют одинаковые обозначения.
Настоящее изобретение описано для примера робота, перемещающегося при помощи по меньшей мере одного колеса. Однако изобретение можно применять для любого подвижного аппарата, имеющего по меньшей мере одно колесо.
На фиг. 1 показан робот-гуманоид 100, выполненный с возможностью подзарядки на заявленной зарядной базе. Робот 100, показанный на фиг. 1, взят в качестве примера робота-гуманоида, выполненного с возможностью подзарядки на заявленной базе. Нижняя часть робота 100, показанного на фиг. 1, не обладает функцией ходьбы, но может передвигаться в любом направлении на своем цоколе 140, который катится по поверхности, на которой находится робот 100. В нашем примере робот 100 имеет высоту 110, которая может составлять около 120 см, глубину 120 около 65 см и ширину 130 около 40 см. В специальной конфигурации робот имеет планшет 150, при помощи которого он может обмениваться сообщениями (аудио, видео, страницы интернет) с окружающей его средой или принимать входящие сообщения от пользователей через сенсорный интерфейс планшета. Кроме процессора планшета робот использует также процессор своей собственной материнской платы, которая может быть, например, платой ATOMTM Z530 компании IntelTM. Предпочтительно робот имеет также процессор, предназначенный для потока данных между материнской платой и платами, на которых установлены магнитные вращающиеся датчики или сокращенно MRE от англо-саксонского термина Magnetic Rotary Encoders и датчики, контролирующие приводы шарниров в конечности и шары, которые робот использует в качестве колес в варианте выполнения изобретения. Приводы могут быть разного типа в зависимости от амплитуды максимального момента, необходимого для определенного шарнира. Например, можно использовать бесщеточные двигатели постоянного тока без сердечника e-minebeaTM (например, SE24Р2СТСА) или бесщеточные двигатели постоянного тока MaxonTM (например, EC455_70W). Магнитные вращающиеся датчики предпочтительно используют эффект Холла с точностью 12 или 14 бит.
В вариантах выполнения изобретения, робот, показанный на фиг. 1, тоже содержит различные типы датчиков. Некоторые датчики предназначены для контроля положения и движений робота. Это относится, например, к инерциальному блоку, расположенному в туловище робота и содержащему трехосный гироскоп и трехосный акселерометр. Робот может также содержать две цветные RGB камеры 2D в передней части робота (верх и низ) типа системы на кристалле (или SOC от англо-саксонского термина System On Chip), такие как Shenzen V-Vision Technology LtdTM *OV5640) с разрешением 5 мегапикселей на 5 изображений в секунду и с горизонтальным полем обзора (называемым также FOV от англо-саксонского термина Field Of View) около 57° по горизонтали и 44° по вертикали. Сзади глаз робота можно также установить датчик 3D, такой как датчик ASUS XTIONTM SOC с разрешением 0,3 мегапикселя на 20 изображений в секунду примерно с таким же полем обзора, что и у камер 2D. Робот можно также оснастить лазерными генераторами линий, например, тремя на уровне головы и тремя в основании, чтобы он мог определять свое относительное положение по отношению к предметам и/или людям в своей окружающей среде. В варианте выполнения в голове робота можно установить четыре микрофона чувствительностью 300 мВ/Па +/-3дБ на 1 кГц и с частотным диапазоном от 300 Гц до 12 кГц (-10дБ относительно 1 кГц). Робот может также включать в себя два датчика типа гидролокатора, в случае необходимости, расположенные спереди и сзади своего основания для измерения расстояния, которое отделяет его от предметов и/или людей в его окружающей среде. Робот может также содержать сенсорные датчики на своей голове или на своих кистях для обеспечения взаимодействия с людьми. Он может также иметь амортизаторы на своем основании для защиты от препятствий, который он встречает на своем пути.
Чтобы отображать свои эмоции и общаться с людьми в своей окружающей среде робот может также содержать:
- светодиоды LED, например, в глазах, ушах или на плечах;
- громкоговорители, например, в количестве двух, установленные в ушах.
Робот может сообщаться с базой или с другими роботами через связь Ethernet RJ45 или WiFi 802.11.
Робот может получать питание от литий-железо-фосфатной батареи с энергией около 400 ватт-час или от литий-полимерной трехкомпонентной батареи (литий-кобальт-марганец) примерно на 860 ватт-час. Робот может иметь доступ к зарядной базе, соответствующей типу содержащейся в нем батареи.
Положением и движениями робота управляют приводы с использованием алгоритмов, которые активируются цепями, находящимися в каждой конечности, и исполнительные механизмы, находящиеся в окончании каждой конечности, с учетом измерений датчиков.
На фиг. 2 представлен пример цоколя 140, содержащего колеса 51, 51, 52 для робота-гуманоида, выполненного с возможностью подзарядки на заявленной зарядной базе. В примере, представленном на фиг. 2, цоколь 140 содержит три колеса 50, 51, 52. Для осуществления подзарядки на заявленной зарядной базе цоколь 140 должен содержать по меньшей мере одно колесо 50. Разумеется, он может содержать несколько таких колес.
На фиг. 3 представлен схематичный вид в разрезе базы зарядного узла в соответствии с изобретением. Зарядная база 200 предназначена для зарядки батареи подвижного аппарата, содержащего по меньшей мере одно колесо 50. База 200 выполнена с возможностью подключения к электрическому источнику. База 200 содержит приемную поверхность 210 и цокольную плоскость 220, предназначенную для размещения на опорной плоскости 230. Приемная поверхность 210 и цокольная плоскость 220 образуют острый угол 240. База 200 содержит полусферическую полость 250, предназначенную для размещения в ней колеса 50. База содержит также электрический соединитель 260. Электрический соединитель 260 может, например, находиться на приемной поверхности 210. Соединитель 260 содержит контакт 330, подвижный в направлении, по существу перпендикулярном к цокольной плоскости 220. Подвижный контакт 330 может быть выполнен в виде пружины или любой другой детали, обладающей определенной упругостью.
База 200 содержит также соединитель 265 присутствия подвижного аппарата на базе 200 таким образом, чтобы он мог активироваться после соединения электрического соединителя 260 и батареи. Соединитель 265 присутствия имеет степень свободы в поступательном движении в направлении, по существу перпендикулярном к цокольной плоскости 220. Таким образом, когда подвижный аппарат заходит на зарядную базу 220 с целью подзарядки своей батареи, соединитель 265 присутствия перемещается поступательным движением под весом подвижного аппарата. Иначе говоря, соединитель 265 присутствия заглубляется в приемную поверхность 210 базы 200, когда подвижный аппарат находится на базе.
Электрический соединитель 260 и соединитель 265 присутствия слегка смещены. Таким образом, во время опускания колеса 50 в полусферическую полость 250 сначала происходит электрическое соединение между электрическим соединителем 260 и базой 200. Затем только после электрического соединения активируется, то есть заглубляется соединитель 265 присутствия по причине присутствия подвижного аппарата на зарядной базе 200. После этого происходит зарядка. Заглубление соединителя 265 присутствия в последнюю очередь позволяет избежать образования электрической дуги, которая может привести к повреждению деталей. После зарядки батареи и в момент, когда подвижный аппарат покидает базу, сначала, наоборот, происходит отсоединение соединителя 265 присутствия, что приводит к электрическому отключению. Затем происходит отсоединение электрического соединителя 260 от подвижного аппарата (то есть физическое отсоединение), так как подвижный аппарат покидает базу 200.
На фиг. 4 показана заявленная зарядная база 200. База 200 содержит первую контрформу 270, расположенную на пересечении между приемной поверхностью 210 и цокольной плоскостью 220. Первая контрформа 270 предназначена для выполнения функции упора для второго колеса 52 подвижного аппарата в случае, когда аппарат содержит два колеса. Если аппарат содержит три колеса 51, 51, 52, как показано на фиг. 2, база 200 содержит вторую контрформу 280, которая тоже образует упор для третьего колеса 51 подвижного аппарата.
База 200 содержит направляющую 290, выполненную в приемной поверхности 210 между пересечением приемной поверхности 210 и цокольной плоскости 220 и полостью 250. Направляющая 290 предназначена для направления колеса 50 к полости 250.
База 200 обеспечивает надежную установку на место подвижного аппарата для его подзарядки на базе 200. В случае подвижного аппарата, содержащего три колеса 50, 51, 52, колесо 50 заходит на направляющую 290, которая обеспечивает направление колеса 50 в сторону полусферической полости 250 зарядной базы 200. Иначе говоря, направляющая 290 выполнена с возможностью обеспечения центровки колеса 50 вокруг главного направления направляющей 290, при этом точность центровки повышается по мере приближения к полости 250. Во время своего поступательного перемещения по приемной поверхности 210 колесо 50 направляется по направляющей 290, в идеале по ее центру. Когда колесо 50 входит в контакт с полусферической полостью 250, колесо 50 следует по линии наибольшего наклона полости, чтобы колесо 50 заняло положение в центре полусферической полости 250. Иначе говоря, траектория колеса 50 соответствует подъему к полусферической полости 250, затем опусканию в полусферическую полость 250. Захождение колеса 50 в полость 250 происходит одновременно с установлением контакта между электрическим соединителем 260 и батареей подвижного аппарата.
Колесо 50 вошло в полость 250. Степень свободы поступательного перемещения подвижного аппарата оказалась заблокированной. Колеса 51, 52 пришли в положение упора в контрформы 270, 280. Степень свободы во вращении подвижного аппарата заблокирована. Таким образом, подвижный аппарат находится в идеальном положении на зарядной базе 200. При этом электрический соединитель 260 базы 200 входит в контакт с электрическим соединителем подвижного аппарата для обеспечения зарядки батареи подвижного аппарата. На фиг. 4 показаны два соединителя 260. Заявленная база 200 может содержать только один или более двух соединителей.
Полость 250 имеет центр 300 и полюс 310, при этом ось Z, проходящая через центр 300 и полюс 310, является по существу перпендикулярной к опорной плоскости 230. База 200 содержит выемку 320, проходящую через базу 200 от полюса 310 полости 250 по существу параллельно оси Z. Выемка 320 позволяет удалять воду или любое другое жидкое вещество, скапливающееся в полости 250 напрямую или опосредованно через колесо 50.
База 200 имеет контур 340, выполненный таким образом, что повторяет формы подвижного аппарата. Таким образом, после установки на зарядной базе 200 подвижный аппарат хорошо удерживается на базе. Контур 340 является также средством, позволяющим убедиться, что речь идет именно о подвижном аппарате, соответствующем своей базе, который зашел на зарядку.
На фиг. 5 в виде схемы представлены этапы заявленного способа зарядки. Согласно изобретению, способ зарядки содержит следующие этапы:
- по меньшей мере одно колесо 50 направляют в полусферическую полость 250,
- подвижный аппарат поступательно перемещают по приемной поверхности 210,
- по меньшей мере одно колесо 50 вводят в полусферическую полость 250 и одновременно устанавливают контакт между соединителем 260 базы и батареей подвижного аппарата,
- второе колесо 52 аппарата помещают в положение упора в контрформу 270.
Кроме того, способ дополнительно содержит этап активации зарядки, включающий в себя следующие этапы:
- проверяют присутствие подвижного аппарата на базе 200 по нажатию подвижного аппарата на соединитель 265 присутствия,
- измеряют напряжение на клеммах батареи и сравнивают измеренное напряжение с минимальным значением и с максимальным значением напряжения,
- измеряют внутреннее сопротивление батареи и сравнивают измеренное сопротивление с минимальным значением и с максимальным значением сопротивления.
Чтобы зарядка батареи могла быть активирована, необходимо осуществить все три вышеупомянутых этапа. Следовательно, необходимо убедиться, что подвижный аппарат нормально позиционирован на базе. Это проверяют по нажатию соединителя 265 присутствия. Поскольку база имеет форму, соответствующую подвижному аппарату, и имеет контур, которые повторяет формы подвижного аппарата, этот этап обеспечивает присутствие подвижного аппарата, предназначенного для подзарядки именно на этой зарядной базе.
Кроме того, необходимо, чтобы напряжение на клеммах батареи находилось в пределах между заранее определенными минимальным значением и максимальным значением напряжения. Например, для батареи с номинальным напряжением 25,4 В напряжение, измеряемое на клеммах батареи должно находиться в пределах от 17 до 26 В.
Наконец, необходимо, чтобы внутреннее сопротивление батареи находилось в пределах между заранее определенными минимальным значением и максимальным значением сопротивления. Это значение составляет несколько десятков кОм. Это измерение представляет собой меру безопасности, чтобы избежать любого прохождения тока в случае, когда на зарядной базе окажется человеческое тело.
После соблюдения этих трех условий происходит активация зарядки.
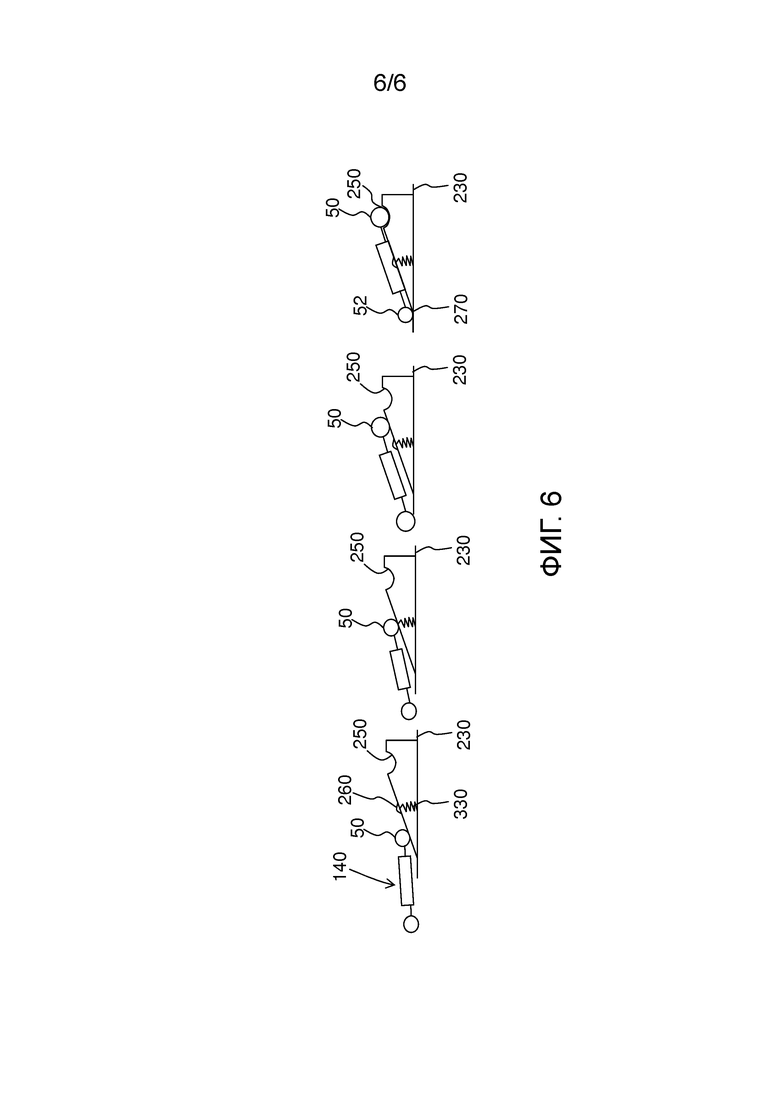
На фиг. 6а, 6b, 6c, 6d схематично показаны различные этапы, в ходе которых подвижный аппарат заходит на заявленную зарядную базу. Для упрощения фигур показан только цоколь 140 подвижного аппарата.
Как показано на фиг. 6а, подвижный аппарат приближается к своей зарядной базе 200. Для обнаружения своей базы 200 аппарат может содержать устройство обнаружения препятствия, содержащее по меньшей мере один излучатель электромагнитного пучка, который может образовать виртуальную плоскость, пересекающуюся с препятствием, по меньшей мере один датчик изображения, выполненный с возможностью получения изображения пересечения виртуальной плоскости и препятствия, средство анализа изображения, выполненное с возможностью определения препятствия и сравнения препятствия с контрольным изображением.
В частности, устройство обнаружения может содержать первый так называемый горизонтальный излучатель первого горизонтального пучка, проходящего в первой виртуальной плоскости, по существу параллельной опорной плоскости, и первый датчик изображения, выполненный с возможностью получения изображения пересечения первой виртуальной плоскости и препятствия.
Поскольку приоритетным направлением перемещения подвижного аппарата является первое направление вдоль оси Х, первая виртуальная плоскость образует угловой сектор вокруг оси Х, и устройство обнаружения препятствия дополнительно содержит второй так называемый горизонтальный излучатель второго горизонтального пучка, проходящего во второй виртуальной плоскости в первом направлении, образуя угловой сектор вокруг оси Y, перпендикулярной к оси Х и по существу параллельной опорной плоскости. Устройство обнаружения препятствия содержит второй датчик изображения, выполненный с возможностью получения изображения пересечения второй виртуальной плоскости и препятствия. Устройство обнаружения препятствия содержит третий так называемый горизонтальный излучатель третьего горизонтального пучка, проходящего в третьей виртуальной плоскости во втором направлении, противоположном первому направлению, образуя угловой сектор вокруг оси Y по существу параллельно опорной плоскости. Устройство обнаружения препятствия содержит третий датчик изображения, выполненный с возможностью получения изображения пересечения третьей виртуальной плоскости и препятствия.
Первый, второй и третий горизонтальные излучатели установлены на подвижном аппарате на определенной высоте от опорной плоскости. Виртуальные плоскости, соответственно образованные излучателями, могут пересекаться с препятствием, находящемся на высоте, превышающей эту высоту, или с препятствием, часть которого находится на уровне виртуальных плоскостей. Излучатели обеспечивают обнаружение препятствия, которое можно рассматривать как панорамное обнаружение.
Датчик изображения может также быть так называемым «широкоугольным» датчиком изображения, который может сам снимать все три горизонтальные виртуальные плоскости.
Устройство обнаружения препятствия содержит так называемый плоский излучатель плоского пучка, проходящего в виртуальной плоскости, которая может пересекаться с опорной плоскостью по прямой, перпендикулярной к оси Х. Первый датчик изображения выполнен с возможностью получения изображения прямой, являющейся результатом пересечения виртуальной плоскости и опорной плоскости. Виртуальная плоскость, образованная излучателем, может пересекаться с препятствием, находящимся на высоте, соответствующей расстоянию между виртуальной плоскостью и опорной плоскостью. Речь может идти о препятствии большого или небольшого размера, находящемся на опорной плоскости. В качестве примера можно указать отверстие или дверной упор.
Устройство обнаружения препятствия содержит так называемый наклонный излучатель первого наклонного пучка, проходящего в первой наклонной виртуальной плоскости в первом направлении вдоль оси и пересекающего опорную плоскость. Первый датчик изображения выполнен с возможностью получения изображения вокруг пересечения наклонных виртуальных плоскостей с опорной плоскостью.
Наклонные пучки могут пересекаться с небольшими препятствиями, отверстиями или препятствиями большого размера, с которыми горизонтальные пучки не смогли пересечься.
Таким образом, шесть пучков позволяют устройству обнаружения препятствия образовать пересечение с виртуальными плоскостями и любым препятствием, находящимся в ближайшей окружающей среде. В случае зарядной базы 200 пересечение между виртуальными плоскостями и базой 200 позволяет получить точное изображение, известное подвижному аппарату. Таким образом, подвижный аппарат может обнаружить базу 200 и направиться к ней для подзарядки своей батареи.
Колесо 50 направляется к полости 250 при помощи направляющей 290. Особенностью направляющей является возможность свободной центровки на уровне пересечения между цокольной плоскостью 220 и приемной поверхностью 210. Таким образом, колесо 50 может поступательно перемещаться по приемной поверхности 210 в направлении направляющей 290, даже если подвижный аппарат не идеально центрован с базой 200. Чем ближе направляющая 290 к полости 250, тем точнее центровка. Таким образом, в конце поступательного перемещения подвижного аппарата по приемной поверхности 210 подвижный аппарат оказывается точно на своей базе 200.
Во время поступательного перемещения подвижного аппарата по приемной поверхности 210, как показано на фиг. 6b, цоколь 140 проходит над соединителем 260, избегая любого трения между цоколем 140 и соединителем 260. Это позволяет предупредить повреждение соединителя. Кроме того, это позволяет избегать образования электрической дуги между соединителями базы 200 и аппаратом.
Следует отметить, что на фиг. 6b представлен вид в разрезе, при этом колесо 50 перемещается в направляющей 290 и не касается соединителя 260, находящегося за пределами направляющей 290.
Поступательное движение подвижного аппарата к полости 250 продолжается (см. фиг. 6с). Наконец, колесо 50 заходит в полость 250, следуя по линии наибольшего наклона полости 250, при этом колесо 52 приходит в положение упора в контрформу 270, и одновременно соединитель 260 базы 200 входит в контакт с положительным и отрицательным электрическими полюсами батареи подвижного аппарата под двойным действием опускания в полость и конца поступательного движения вдоль продольной оси направляющей 290. Подвижный аппарат идеально встал на свое место на зарядной базе 200. Хорошему контакту между соединителем 260 и батареей способствует двойное действие подвижного контакта 330 и давления, создаваемого за счет силы тяжести подвижного аппарата. Следует отметить, что направление опоры подвижного аппарата на соединитель 260 отличается от поступательного перемещения по опорной плоскости. Подвижный аппарат опирается на соединитель 260 поступательным движением, по существу перпендикулярным к опорной плоскости. Это позволяет установить контакт соединителя 260 с батареей (в частности, с клеммами батареи) точно в момент, когда может начаться зарядка, чтобы избегать любого трения в момент установления контакта и образования электрических дуг во время отсоединения батареи подвижного аппарата от базы 200.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАРЯДКИ БАТАРЕИ И СПОСОБ ЗАРЯДКИ, РЕАЛИЗУЮЩИЙ РАБОТУ ТАКОГО УСТРОЙСТВА | 2017 |
|
RU2692767C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАРЯДКОЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2420849C1 |
| Система зарядки мобильных устройств | 2017 |
|
RU2737311C1 |
| Система зарядки мобильных устройств | 2017 |
|
RU2645748C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ НА ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ И СПОСОБ ОБНАРУЖЕНИЯ С ПРИМЕНЕНИЕМ ТАКОГО УСТРОЙСТВА | 2015 |
|
RU2650098C1 |
| ПЕРЕЗАРЯЖАЕМОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2006 |
|
RU2378752C2 |
| БЕСПРОВОДНОЙ СПОСОБ ЗАРЯДКИ И ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2022 |
|
RU2789308C1 |
| ЗАРЯДНЫЙ ЧЕХОЛ ДЛЯ ЭЛЕКТРОННОГО УСТРОЙСТВА ДЛЯ ВЕЙПИНГА (ВАРИАНТЫ) | 2018 |
|
RU2762715C2 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2019 |
|
RU2777408C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ С ПАРКОВОЧНЫМ МОДУЛЕМ ДЛЯ РОБОТА-ПЫЛЕСОСА | 2010 |
|
RU2430672C1 |


Объектом изобретения является зарядный узел, содержащий подвижный аппарат и зарядную базу (20), имеющую форму, соответствующую форме подвижного аппарата, и выполненную с возможностью установки на ней подвижного аппарата и предназначенную для зарядки батареи подвижного аппарата, содержащего по меньшей мере одно колесо (50, 51, 52), при этом база (200) выполнена с возможностью подключения к электрическому источнику, отличающийся тем, что база (200) содержит приемную поверхность (210) и цокольную плоскость (220), предназначенную для размещения на опорной плоскости (230), при этом приемная поверхность (210) и цокольная плоскость (220) базы (200) образуют острый угол (240), полусферическую полость (250), выполненную в виде выемки в приемной поверхности (210) и предназначенную для размещения в ней упомянутого по меньшей мере одного колеса (50, 51, 52), по меньшей мере один электрический соединитель (260), расположенный таким образом, чтобы обеспечивать соединение базы (200) с батареей во время опускания упомянутого по меньшей мере одного колеса (50, 51, 52) в полусферическую полость (250). Объектом изобретения является также способ зарядки с применением заявленного зарядного узла. 2 н. и 8 з.п. ф-лы, 6 ил.
1. Зарядный узел, содержащий подвижный аппарат и зарядную базу (200), имеющую форму, дополняющую форму подвижного аппарата, и выполненную с возможностью установки на ней подвижного аппарата и предназначенную для зарядки батареи подвижного аппарата, содержащего по меньшей мере одно колесо (50, 51, 52), при этом база (200) выполнена с возможностью подключения к электрическому источнику, отличающийся тем, что база (200) содержит
- приемную поверхность (210) и плоскость (220) основания, предназначенную для размещения на опорной плоскости (230), при этом приемная поверхность (210) и плоскость (220) основания базы (200) образуют острый угол (240),
- полусферическую полость (250), выполненную в виде выемки в приемной поверхности (210) и предназначенную для размещения в ней упомянутого по меньшей мере одного колеса (50, 51, 52),
- по меньшей мере один электрический соединитель (260), расположенный таким образом, чтобы обеспечивать соединение базы (200) с батареей во время спуска упомянутого, по меньшей мере, одного колеса (50, 51, 52) в полусферическую полость (250),
причем приемная поверхность содержит направляющую (290), выполненную в приемной поверхности (210) между пересечением приемной поверхности (210) и плоскости (220) основания и полостью (250), при этом направляющая (290) предназначена для направления упомянутого по меньшей мере одного колеса (50, 51, 52) в сторону полости (250).
2. Узел по предыдущему пункту, отличающийся тем, что база дополнительно содержит соединитель (265) присутствия подвижного аппарата на базе (200), выполненный с возможностью своей активации после соединения электрического соединителя (260) и батареи.
3. Узел по одному из предыдущих пунктов, отличающийся тем, что база содержит первую контрформу (270), расположенную на пересечении между приемной поверхностью (210) и плоскостью (220) основания и предназначенную для образования упора для второго колеса (51, 52) аппарата.
4. Узел по одному из предыдущих пунктов, отличающийся тем, что направляющая (290) выполнена с возможностью обеспечения центровки колеса (50) вдоль главного направления направляющей (290), и тем, что по мере приближения к полости (250) точность центровки повышается.
5. Узел по одному из предыдущих пунктов, отличающийся тем, что полость (290) имеет центр (300) и полюс (310), при этом ось Z, проходящая через центр (300) и полюс (310), является, по существу, перпендикулярной к опорной плоскости (230), и тем, что база (200) содержит выемку (320), проходящую через базу (200) от полюса (310) полости (250) и, по существу, параллельно оси Z.
6. Узел по одному из предыдущих пунктов, отличающийся тем, что соединитель (260) содержит контакт (330), подвижный в направлении, по существу, перпендикулярном к плоскости (220) основания.
7. Узел по одному из предыдущих пунктов, отличающийся тем, что контур (340) повторяет формы подвижного аппарата.
8. Способ зарядки с применением зарядного узла по одному из пп. 2-7, отличающийся тем, что содержит следующие этапы:
- по меньшей мере одно колесо (50, 51, 52) направляют в полость (250) при помощи направляющей (290),
- подвижный аппарат поступательно перемещают по приемной поверхности (210) (этап 1010),
- упомянутое по меньшей мере одно колесо (50, 51, 52) устанавливают в полусферическую полость (250) и одновременно приводят электрический соединитель (260) базы (200) в контакт с батареей подвижного аппарата (этап 1020).
9. Способ зарядки по предыдущему пункту, отличающийся тем, что содержит этап активации зарядки батареи, включающий в себя следующие этапы:
- проверяют присутствие подвижного аппарата на базе (200) по нажатию подвижным аппаратом на соединитель (265) присутствия,
- измеряют напряжение на терминалах батареи и измеренное напряжение сравнивают с минимальным значением и с максимальным значением напряжения,
- измеряют внутреннее сопротивление батареи и измеренное сопротивление сравнивают с минимальным значением и с максимальным значением сопротивления.
10. Способ зарядки по п. 8, отличающийся тем, что дополнительно содержит этап (1030) установки второго колеса (51, 52) в положение упора в контрформу (270).
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| EP 1921523 A2 14.05.2008 | |||
| US 5926909 A 27.07.1999 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

