Изобретение относится к зарядному устройству, содержащему объект и вилку для подзарядки подзаряжаемой батареи объекта. Изобретение может быть применено в любой области, требующей подзарядки батареи, например, в телефонии или в робототехнике. Изобретение относится также к способу подзарядки подзаряжаемой батареи, реализующему работу такого устройства.
Объект, работающий на батарее, в какой-то момент требует подзарядки своей батареи. В таком случае этот объект подключают к источнику питания через специальное устройство, позволяющее подзарядить его батарею.
Тем не менее, может случиться так, что при подключении объекта к зарядному устройству возникают трудности, - либо из-за плохого позиционирования устройства относительно объекта, либо из-за плохих контактов между разъемами объекта и устройства. Кроме того, может быть так, что при подключении объекта к зарядному устройству между электрическими разъемами объекта и зарядного устройства возникают электрические дуги, которые потенциально могут повредить объект и (или) устройство.
Объект также может быть мобильным транспортным средством, точнее "моторным" транспортным средством, то есть перемещающимся самостоятельно. Мобильное транспортное средство может снабжаться электричеством от одной или более аккумуляторных батарей или, в более общем смысле, - от одной или более батарей. Это относится к набору электрических аккумуляторных батарей, соединенных между собой таким образом, чтобы при этом образовался генератор электрического напряжения требуемой емкости. Первое назначение этой батареи - обеспечивать ток и напряжение, величиной, необходимой для движения транспортного средства. Эта батарея может также использоваться для питания встроенных в транспортное средство электронных устройств.
Затем в определенный момент становится необходимо подзарядить батарею объекта или транспортного средства. Вообще говоря, транспортное средство, работающее от батареи, способно двигаться до тех пор, пока батарея заряжена и становится неподвижным по окончании ее заряда. После этого необходимо "внешнее вмешательство", например, - установка транспортного средства на станцию для подзарядки батареи. При этом могут возникать те же самые проблемы, что и указанные выше: трудности электрического соединения транспортного средства с его станцией и (или) возникновение нежелательных электрических дуг.
Кроме того, во время подзарядки транспортное средство, которое должно при этом оставаться на этой станции, в течение времени, необходимого для подзарядки батареи, является неработающим. Что касается какого-либо объекта, то когда подзаряжается, он должен оставаться на своей станции зарядки, что исключает его перемещение.
Задачей изобретения является устранение всех или некоторых из указанных выше проблем предложением заряжающего устройства, включающее в себя объект, имеющий батарею, при этом объект может быть неподвижным объектом или мобильным транспортным средством, а также разъем, предназначенный для подзарядки батареи объекта, вилку, которая может быть подключена к источнику питания, а также способа, реализующего работу такого устройства, что позволяет любому объекту подзаряжаться с упрощенным соединением между вилкой и объектом. Кроме того, зарядное устройство в соответствии с изобретением выполнено с возможностью разрешения мобильному транспортному средству перемещаться, даже если его батарея подзаряжается.
С этой целью объектом изобретения является зарядное устройство, содержащее объект, содержащий батарею, вилку, предназначенную для подзарядки батареи, причем, вилка имеет возможность подсоединения к источнику питания, при этом объект содержит базу, имеющую возможность приема в себя вилки, содержащей первый электрический разъем, первый магнитный разъем, имеющий возможность позиционирования вилки относительно базы, при этом вилка содержит контактную поверхность с формой, комплементарной форме поверхности базы, второй электрический разъем, выполненный с возможностью входа в контакт с первым электрическим разъемом, чтобы обусловить электрический контакт между первым и вторым электрическими разъемами, когда контактная поверхность помещена на поверхность базы, второй магнитный разъем, расположенный вблизи контактной поверхности, притягивающий первый магнитный разъем, так чтобы обусловить взаимную выставку первого и второго магнитных разъемов и обеспечить электрический контакт во время подзарядки батареи, при этом один из первого и второго электрических разъемов является поверхностным разъемом, а другой из первого и второго электрических разъемов является точечным разъемом, выполненным с возможностью расположения относительно поверхностного разъема с несколькими совершенно определенными ориентациями контактной поверхности на базе.
Поверхностный разъем, предпочтительно, имеет круглую форму.
Зарядное устройство, предпочтительно, содержит также детектор присутствия, способный определять контакт между контактной поверхностью и поверхностью базы.
В соответствии с одним вариантом осуществления точечный разъем образует первую точку контакта с контактной поверхностью, при этом устройство сконфигурировано таким образом, что один из первого и второго электрических разъемов имеет степень свободы перемещения относительно контактной поверхности вдоль первой оси по существу под прямыми углами к контактной поверхности, проходящей через первую точку контакта.
Устройство, предпочтительно, сконфигурировано с возможностью создания усилия вдоль первой оси по существу под прямыми углами к контактной поверхности, проходящей через первую точку контакта, для обеспечения надежного электрического контакта во время подзарядки батареи.
В соответствии с другим вариантом осуществления вилка может быть подсоединена к источнику питания посредством электрического кабеля, при этом вилка содержит корпус, к которому прикреплены второй электрический разъем и второй магнитный разъем, и часть, которая является вращательно-подвижной относительно корпуса, причем кабель закреплен на подвижной части и электрически связан с разъемами гибкими проводами, допускающими поворот подвижной части.
В соответствии с другим вариантом осуществления база содержит полость, имеющую форму, комплементарную форме сферической чашки, имеющую первый полюс и первый радиус, при этом вилка имеет форму сферической чашки, имеющей второй полюс и радиус, по существу равный первому радиусу, и при этом поверхностный разъем центрирован на окружности, центром которой является первый полюс.
Вилка, предпочтительно, содержит третий электрический разъем, расположенный на втором полюсе вилки, при этом база содержит четвертый электрический разъем, расположенный на первом полюсе базы с возможностью входа в контакт с третьим электрический разъемом, для того чтобы - когда контактная поверхность расположена на базе, - допускать электрический контакт между третьим и четвертым электрическими разъемами.
Источник питания, предпочтительно, является источником питания постоянного тока с положительным полюсом и с отрицательным полюсом, при этом третий электрический разъем подсоединен к отрицательному полюсу источника питания, и при этом второй электрический разъем подсоединен к положительному полюсу источника питания.
В соответствии с другим вариантом осуществления контактная поверхность содержит гибкую зону, имеющую некоторую степень свободы перемещения вдоль второй оси по существу под прямыми углами к первой оси, предназначенную для облегчения контакта второго электрического разъема с первым электрическим разъемом, когда контактная поверхность расположена на базе.
Другой объект изобретения представляет собой способ подзарядки, реализующий работу такого зарядного устройства, включающий в себя следующие этапы:
- позиционирование контактной поверхности на поверхности базы,
- взаимная выставка первого и второго электрических разъемов.
Способ подзарядки, предпочтительно, включает в себя также этап активизации подзарядки, включающий в себя следующие этапы:
- проверка наличия вилки на объекте посредством детектора присутствия,
измерение напряжения на выводах батареи и сравнение измеренного напряжения с минимальной величиной напряжения и с максимальной величиной напряжения,
измерение внутреннего сопротивления батареи и сравнение измеренного сопротивления с минимальной величиной сопротивления и с максимальной величиной сопротивления.
Способ подзарядки, предпочтительно, включает в себя также этап окончания подзарядки, включающий в себя следующие этапы, выполняемые в нижеследующем порядке:
отсоединение второго электрического разъема и первого электрического разъема,
отсоединение четвертого электрического разъема и третьего электрического разъема.
Объектом может быть любой объект, имеющий батарею, которая может подзаряжаться. Он может быть таким объектом как телефон, игрушка, или же он может относиться к мобильному объекту, такому как "моторное" транспортное средство, то есть, так сказать объект, который перемещается самостоятельно, например, робот.
Изобретение будет более понятно, и при этом станут очевидны его другие преимущества - после прочтения подробного описания, приведенного в качестве примера варианта исполнения, причем это описание проиллюстрировано прилагаемыми чертежами, в которых:
- фигура 1 схематично представляет вилку зарядного устройства по настоящему изобретению,
- фигура 2 представляет пример поверхности базы зарядного устройства по настоящему изобретению,
- фигура 3 схематично представляет вид спереди контактной поверхности вилки зарядного устройства по настоящему изобретению,
- фигура 4 представляет вид спереди поверхности базы, которая может принимать представленную на фигуре 3 вилку зарядного устройства по настоящему изобретению,
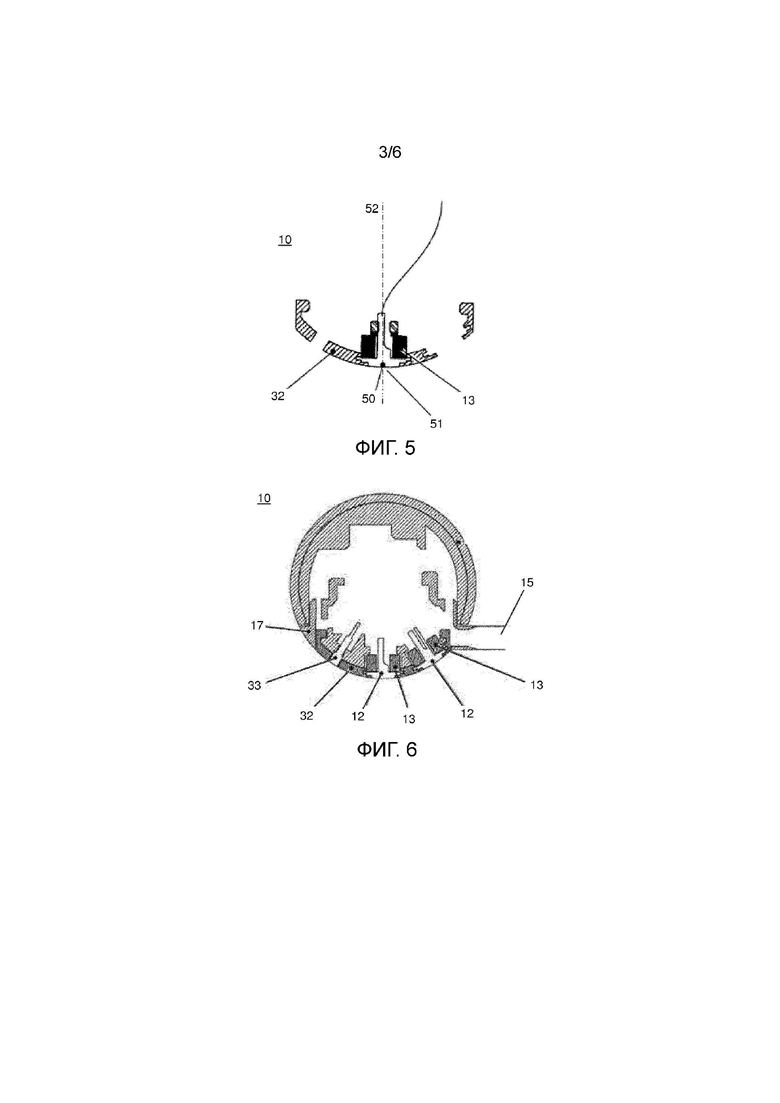
- фигура 5 схематично представляет поперечное сечение электрического разъема вилки зарядного устройства по настоящему изобретению,
- фигура 6 схематично представляет поперечное сечение вилки зарядного устройства по настоящему изобретению,
- фигура 7 схематично представляет поперечное сечение вилки зарядного устройства по настоящему изобретению, причем контактная поверхность вилки находится в контакте с поверхностью базы объекта,
- фигура 8 схематично представляет вид поперечного сечения объекта зарядного устройства по настоящему изобретению,
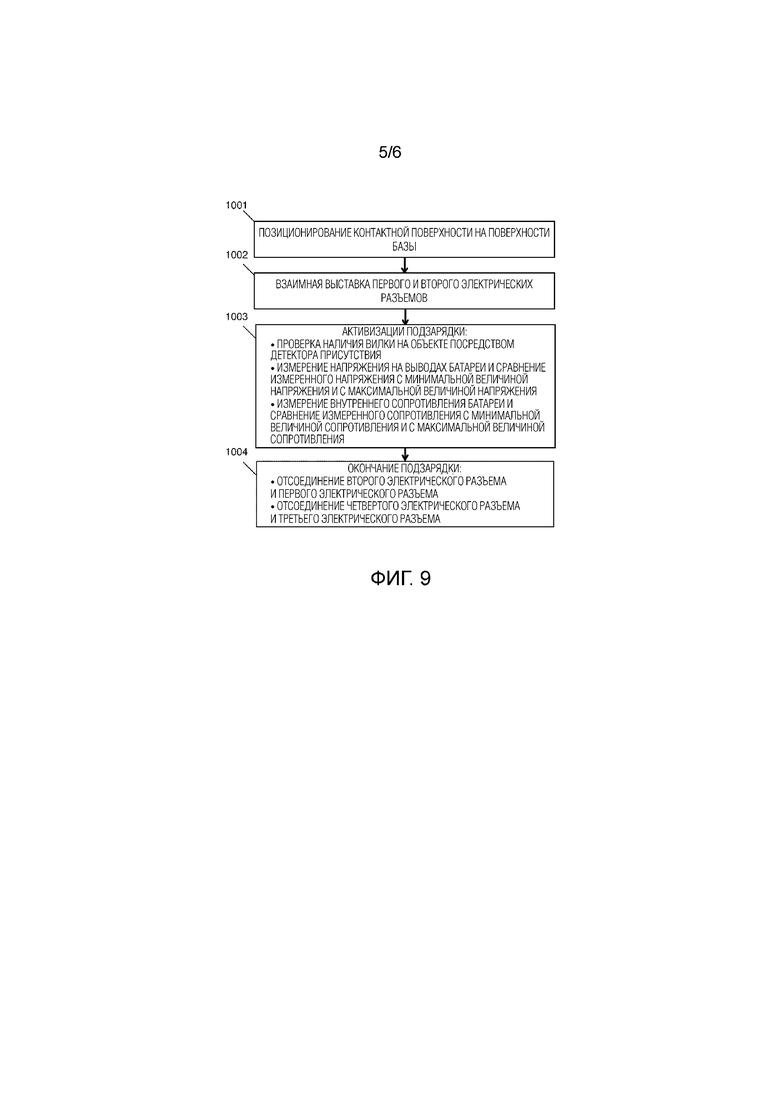
- фигура 9 иллюстрирует этапы способа подзарядки, реализующего работу зарядного устройства по настоящему изобретению,
- фигура 10 представляет робота-гуманоида, выполненного с возможностью его подзарядки, используя вилку зарядного устройства в соответствии с изобретением.
Для ясности на разных фигурах одни и те же элементы будут обозначены одними и теми же ссылочными позициями.
В данном описании изобретение описано на примере некоего объекта. Однако настоящее изобретение применимо к любому другому объекту, стационарному или подвижному, то есть к любому подвижному транспортному средству, имеющему батарею, которую можно заряжать.
Фигура 1 схематично представляет вилку 10 зарядного устройства 100 по настоящему изобретению.
Фигура 2 представляет пример поверхности объекта 20 зарядного устройства 100 по настоящему изобретению.
Зарядное устройство 100 содержит объект 20, содержащий батарею и вилку 10, предназначенную для подзарядки батареи. Вилка 10 может быть подсоединена к источнику электропитания.
Как можно видеть на фигуре 2, объект 20 содержит базу 21, способную принимать вилку 10. База 21 содержит первый электрический разъем 22 и первый магнитный разъем 23 (на фигуре 2 не виден), способный устанавливать вилку 10 относительно базы 21.
В этом приложении разъем, электрический или магнитный, следует понимать как контактный элемент, то есть, точку или поверхность, делающую возможным создание соединения, соответственно, - электрического или магнитного.
Как можно видеть на фигуре 1, вилка 10 содержит контактную поверхность 11 с формой, комплементарной форме поверхности базы 21. Вилка содержит второй электрический разъем 12, выполненный таким образом, чтобы входить в контакт с первым электрическим разъемом 22 для обеспечения электрического контакта между первым и вторым электрическими разъемами 22, 12, когда контактная поверхность 11 расположена на поверхности базы 21. Вилка 10 содержит второй магнитный разъем 13 (на фигуре 1 не виден), расположенный вблизи контактной поверхности 11, притягивающий первый магнитный разъем 23, так чтобы обуславливать взаимную выставку первого и второго электрических разъемов 22, 12, а также электрический контакт во время зарядки батареи.
В соответствии с изобретением один из первого и второго электрических разъемов 22, 12 является поверхностным разъемом 24, а другой из первого и второго электрических разъемов 22, 12 является точечным разъемом 14, выполненным с возможностью расположения относительно поверхностного разъема 24 с несколькими совершенно определенными ориентациями контактной поверхности 11 на базе 21.
Поскольку контактная поверхность 11 имеет форму, комплементарную форме поверхности базы 21, содержащей первый электрический разъем 22, то во время зарядки батареи обе поверхности находятся во взаимном контакте. Два магнитных разъема 23, 13 расположены, соответственно, вблизи поверхности базы 21 и контактной поверхности 11. Притягивая первый магнитный разъем приложением вилки 10 к базе 21, два магнитных разъема 23, 13 оказывают друг на друга притягивающее усилие. Эти два магнитных разъема 23, 13 расположены таким образом, что когда они оказывают друг на друга притягивающее усилие, два электрических разъема 22, 12 входят в контакт друг с другом.
Изобретение описано для конфигурации с магнитным разъемом в вилке 10 и с магнитным разъемом в базе 21, но оно также включает в себя конфигурации, в которых вилка 10 содержит нескольких магнитных разъемов 13, а база 21 содержит нескольких магнитных разъемов 23, - предпочтительно, но не обязательно - то же самое количество магнитных разъемов, что и вилка.
Магнитные разъемы 13, 23 позволяют поддерживать оптимальный электрический контакт электрических разъемов 12, 22 между собой. Кроме того, они также служат в качестве поляризаторов и обеспечивают автоматическую взаимную выставку вилки 10 и базы 21.
Согласно предпочтительному варианту осуществления поверхностный разъем 24 имеет круглую форму.
Кроме того, один из электрических разъемов 22, 12 является поверхностным разъемом 24, а другой является точечным разъемом 14, выполненным с возможностью входа в контакт с поверхностным разъемом 24, а поскольку один или более магнитных разъемов распределены, соответственно, в вилке 10 и в базе 21, можно устанавливать электрический контакт между вилкой 10 и базой 21 независимо от ориентации контактной поверхности 11 вилки 10 относительно базы 21, и делать это можно для нескольких различных ориентаций контактной поверхности 11 относительно поверхности базы 21. Например, при поверхностном разъеме 24 в виде кольца, как это показано на фигуре 2, точечный разъем 14 может входить в контакт с поверхностным разъемом 24 независимо от ориентации контактной поверхности 11 вилки 10 и базы 21. Другими словами, контактная поверхность 11 может принимать любое положение в диапазоне поворота на 360° относительно поверхности базы 21. Если рассматривать ось, которая проходит через центр кольца и направлена по существу под прямыми углами к плоскости, содержащей периметр кольца, то вилка 10, а, значит, и ее контактная поверхность 11 может принимать начальное положение, но, кроме того, - и выполнять поворот вокруг упомянутой оси относительно поверхности базы 21 на любой угол в диапазоне от 0 до 360°, и при этом, независимо от величины угла, точечный разъем 14 будет находиться в контакте с поверхностным разъемом 24. Это относится также и к случаю, когда поверхностный разъем 24 имеет многоугольную форму, например прямоугольную. Один и тот же точечный разъем 14 может образовывать электрический контакт с упомянутым поверхностным разъемом 24 при нескольких определенно различных ориентациях контактной поверхности 11 относительно базы 21.
Такая конфигурация благоприятна как тогда, когда вилку 10 прилагают к объекту 20 при положении вилки 10 на базе 21, поскольку при этом нет необходимости в том, чтобы соблюдать определенное выравнивание контактной поверхности 11 вилки 10 относительно поверхности базы 21, чтобы установить контакт между двумя электрические разъемы 12, 22, так и тогда, когда батарея заряжается, поскольку после того, как между двумя электрическими разъемами 12, 22 установился контакт, - вилка может сохранять лишь небольшую возможность поворота без разрыва каким-либо образом электрического контакта между двумя электрическими разъемами 12, 22. Действительно, как только электрический контакт установлен, внешнее воздействие может сместить вилку 10, слегка сдвинув ее по поверхности базы 21. В результате контакта между поверхностным разъемом 24 и точечным разъемом 14 при допустимой степени их взаимного поворота электрический контакт может сохраняться
Поверхностный разъем 24 может быть круглой формы. На фигуре 2 он - кольцо. Изобретение относится также к поверхностному разъему 24, образующему круг, иными словами, кольцо очень малой толщины. Изобретение относится также к поверхностному разъему 24, который является участком круга или участком кольца. В этом случае указанный ранее угол больше не лежит между 0 и 360°. Например, если участок круга или участок кольца является полукругом или полукольцом, то угол лежит в диапазоне от между 0 и 180°. Если участок круга или участок кольца представляет собой четверть круга или четверть кольца, то угол лежит между 0 и 90°.
Изобретение позволяет устранить связь между механическим контактом и электрическим контактом. Таким образом, существует полная свобода от допусков на расположение между электрическими контактами и механической конструкцией, что позволяет осуществлять позиционирование вилки 10 относительно базы 21. Другими словами, изобретение позволяет установить электрический контакт между электрическими разъемами для нескольких различных ориентаций вилки по отношению к базе. Поэтому одиночный точечный разъем 14 может обеспечить электрический контакт с поверхностным разъемом 24 для множества положений вилки 11 на базе 21.
Как пояснялось ранее, один из электрических разъемов 22, 12 благоприятно является поверхностным разъемом 24, а другой точечным разъемом 14. На фигурах 1 и 2 первый электрический разъем 22 является поверхностным разъемом 24, а второй электрический разъем 12 - точечным разъемом 14. Это есть конфигурация, в которой поверхностный разъем 24 находится на базе 21, а точечный разъем 14 - на контактной поверхности 11 вилки 10. Тем не менее, изобретение включает в себя и конфигурацию, в которой поверхностный разъем 24 находится на контактной поверхности 11 вилки 10, а точечный разъем 14 - на базе 21.
Изобретение также включает конфигурацию, в которой имеется несколько точечных разъемов 14. Использование нескольких точечных разъемов 14 позволяет снизить риски короткого замыкания между контактной поверхностью 11 и базой 21.
В предпочтительном варианте исполнения, а также, как это представлено на фигурах 1 и 2, база 21 содержит полость, имеющую форму, комплементарную форме сферической чашки, имеющей первый полюс 30 и первый радиус 31. Вилка 10 имеет форму сферической чашки, имеющей второй полюс и радиус, по существу равный первому радиусу 31, а поверхностный разъем 24 центрирован на окружности, центром которой является первый полюс 30.
Эта конфигурация особенно преимущественна для создания электрического контакта. Таким образом, поверхностный разъем 24 образует часть поверхности, осуществляющей контакт либо на контактной поверхности 11, либо на поверхности базы 21, а точечный разъем 14, организованный на поверхности либо базы 21, либо на контактной поверхности 11, может образовывать электрический контакт с поверхностным разъемом 24, - какой бы ни была эта точка, в которой осуществляется этот контакт с поверхностным разъемом 24.
Поэтому данная конфигурация позволяет осуществлять идеальное позиционирование вилки на базе для обеспечения взаимного выравнивания электрических разъемов и электрического контакта, необходимой для удержания протекающего тока зарядки батареи. Формы сферических участков вилки и базы позволяют им прилегать одна к другой, при этом база 21 полностью соответствует форме вилки 10.
Можно заметить, что вилка в форме сферически чашки и база, имеющая форму, комплементарную форме сферической чашки, представляют собой особенно благоприятную конфигурацию, как это объяснялось ранее и будет пояснено также ниже. Тем не менее, изобретение аналогичным же образом применимо к двум плоским поверхностям (контактной поверхности 11 и поверхности базы 21), которые прижаты одна к другой, или к кубической вилке с базой комплементарной формы для приема этой кубической вилки, или даже вилки восьмиугольного сечения с базой комплементарной формы, или, в более общем смысле, - вилки, имеющей овальное или многоугольное сечение с базой комплементарной формы, и в каждой из этих конфигураций точечный разъем прижимается к поверхности разъема. Другими словами, контакт между точечным разъемом и поверхностным разъемом осуществляется по поверхности элемента (базы или контактной поверхности), содержащего поверхностный разъем. Поэтому точечный разъем находится в контакте с поверхностью элемента (базы или контактной поверхностью вилки в зависимости от выбранной конфигурации), содержащей поверхностный разъем (на фигуре 2 - это база), и этот физический контакт точечного разъема с поверхностью элемента также соответствует контакту между точечным разъемом и поверхностным разъемом.
Зарядное устройство 100 может также благоприятным образом содержать детектор 33 присутствия, способный обнаруживать контакт между контактной поверхностью 11 и поверхностью базы 21. Детектор 33 присутствия делает возможным определение присутствия контактной поверхности 11 у поверхности базы 21. После того, как этот контакт установлен, может начаться зарядка батареи.
На фигуре 1 детектор 33 присутствия находится на контактной поверхности 11. Так же, как и в случае с точечным разъемом, изобретение включает в себя также конфигурацию, в которой на поверхности базы 21 находится детектор присутствия, когда на контактной поверхности 11 вилки 10 находится поверхностный разъем 24.
Фигура 1 показана с тремя детекторами 33 присутствия. Аналогичным же образом, изобретение применимо также только к одному, двум, трем или к более, чем трем детекторам присутствия.
Количество детекторов 33 присутствия, преимущественно, равно количеству точечных разъемов 14, при этом детекторы 33 присутствия и точечные разъемы 14 расположены попеременно по окружности поверхности, то есть на участке контактной сферы.
Фиг. 3 схематично представляет вид спереди контактной поверхности 11 вилки 10 зарядного устройства 100 в соответствии с изобретением. Вилка 10 может быть подключена к источнику питания посредством электрического кабеля 15. Вилка 10 содержит корпус 16, к которому прикреплены второй электрический разъем 12 и второй магнитный разъем 13. Кроме того, вилка 10 содержит также часть 17, которая является вращательно подвижной относительно корпуса 16, причем, кабель 15 прикреплен к подвижной части 17 и электрически связан с разъемами 12 посредством гибких проводов, разрешающих вращение подвижной части 17. Этот признак обладает преимуществом с точки зрения безопасности для объекта (стационарного или неподвижного) и для находящихся поблизости людей, в то время, когда батарея заряжается. Действительно, когда батарея заряжается, объект связан с ней кабелем, и при этом существует вероятность того, что человек, переходящий расположенный на его пути электрический кабель, случайно упадет и (или) свалит этот объект. Однако в силу того, что часть 17 является подвижной относительно корпуса 16, если что-то (или кто-то) касается кабеля, то в зависимости от типа контакта, подвижная часть 17 может совершить вращательное движение относительно корпуса 16, не отсоединяясь от базы 21, и даже не требуя перемещения какой-либо части базы или вилки. Другими словами, даже во время подзарядки электрический кабель 15 может совершать непрерывное вращательное движение на 360° относительно базы 21. Если же этот контакт порождает большие усилия, то вилка 10 в таком случае может отсоединиться от базы 21.
Вращательная подвижность подвижной части 17 может иметь место вокруг вилки, а также и вокруг оси кабеля.
Фигура 4 представляет вид спереди поверхности базы 21, которая может принимать в себе вилку 10 представленного на фигуре 3 зарядного устройства 100 по настоящему изобретению. Согласно другому варианту осуществления вилка 10 может содержать третий электрический разъем 35, расположенный на втором полюсе вилки 10. В этом случае база 21 может содержать четвертый электрический разъем 45, расположенный на первом полюсе базы 21 с тем, чтобы вступать в контакт с третьим электрическим разъемом 35, допуская электрический контакт между третьим и четвертым электрическими разъемами 35, 45, когда контактная поверхность 11 расположена на базе 21. В том случае, когда вилка 10 выполнена в виде сферической чашки, а база 21 имеет комплементарную ей форму, четвертый электрический разъем 45 образует центральный блок, расположенный в центре поверхностного разъема 24. При этом поверхностный разъем 24 и четвертый электрический разъем 45 благоприятно концентричны.
Фигура 5 схематично представляет вид поперечного сечения электрического разъема штепсельной вилки 10 зарядного устройства 100 по настоящему изобретению. Это - точечный разъем 50. Точечный разъем 50 образует первую точку контакта 51 с контактной поверхностью 11. Согласно изобретению устройство 100 сконфигурировано таким образом, что один из первого и второго электрических разъемов имеет степень свободы поступательного перемещения относительно контактной поверхности 11 вдоль первой оси 52 по существу под прямыми углами к контактной поверхности 11, проходящей через первую точку контакта 51. Это относится к каждому из точечных разъемов. Эта степень свободы разрешает небольшое радиальное и независимое перемещение каждого точечного разъема. Со своей стороны, детекторы присутствия установлены жестко и непосредственно подвержены воздействию усилий, принимаемых на себя кабелем. Движения кабеля передаются на один или более детекторов присутствия, которые, будучи распределены по поверхности части сферы, поднимаются и разрывают физический контакт между вилкой и базой. Гибкость установки электрических разъемов, связанная с силой, удерживающей магнитные разъемы по месту, вводит задержку в разрыв контакта, в отличие от детекторов присутствия, которые реагируют мгновенно. Эта последовательность позволяет детекторам присутствия "информировать" зарядное устройство о неизбежном выдергивании вилки и делать это в фазе, предшествующей разрыву электрического контакта. В этом случае подаваемое электропитание может быть выключено, с тем, чтобы избежать образования электрических дуг между электрическими разъемами.
Контактная поверхность 11 преимущественно содержит гибкую зону 32, имеющую некоторую степень свободы перемещения вдоль второй оси по существу под прямыми углами к первой оси 51, предназначенную для облегчения контакта второго электрического разъема 12 с первым электрическим разъемом 22, когда контактная поверхность 11 расположении на базе 21. Эта гибкая зона 32 дает электрическим разъемам вилки 11 некоторую свободу, для того чтобы гарантировать соответствующий контакт с вилкой 11 и базой 21. Таким образом, гибкость гибкой зоны 32 позволяет благоприятно ориентировать второй электрический разъем 12 вдоль оси под прямыми углами к поверхности базы 21.
Альтернативное распределение электрических разъемов и связанных с магнитными разъемами детекторов присутствия имеет преимущество, связанное с отсутствием необходимости в системе точного выравнивания, и оно работает независимо от положения точечных разъемов на поверхностном разъеме.
В соответствии с вариантом осуществления источник питания представляет собой источник постоянного напряжения с положительным полюсом и с отрицательным полюсом. Третий электрический разъем 35, преимущественно, подсоединен к отрицательному полюсу источника питания, а второй электрический разъем 12 подсоединен к положительному полюсу источника питания. Благодаря гибкой зоне 32 и центральному расположению третьего электрического разъема 35, в том случае, если происходит непреднамеренное выдергивания вилки 10, третий разъем 35 отсоединяется от базы последним, что позволяет избегать образования электрической дуги. Третий электрический разъем 35 может быть установлен, например, на пружине или на элементе, выполненном из эластомера, или на любом другом элементе, обладающим определенной эластичностью. По такому же принципу, когда вилку 10 вставляют в базу 21, третий электрический разъем 35 есть электрический разъем, который подсоединяется первым.
Дополнительно зарядное устройство может быть сконфигурировано таким образом, чтобы создавать усилие вдоль первой оси 52 по существу под прямыми углами к контактной поверхности 11, проходящей через первую точку 51 контакта, для обеспечения надежного электрического контакта во время подзарядки батареи.
Фигура 6 схематично представляет вид поперечного сечения вилки 10 зарядного устройства 100 в соответствии с изобретением. Этот вид поперечного сечения позволяет представить одну возможную конфигурацию детектора 33 присутствия на контактной поверхности 11 вилки 10. Аналогичным же образом, магнитные разъемы 13 расположены попеременно с электрическими разъемами 12, с тем, чтобы обеспечить хорошее выравнивание электрических разъемов 12 с электрическим разъемом 22 базы 21.
Фигура 7 схематично представляет вид поперечного сечения вилки 10 зарядного устройства 100 в соответствии с изобретением, причем контактная поверхность 11 вилки 10 находится в контакте с поверхностью базы 21 объекта 20. Магнитные разъемы 13, 23 исключают любое механическое наведение, и когда вилка 10 подносится к базе 21, работают без приоритетной оси. Никакого специального механического наведения не требуется потому, что в этом варианте осуществления никакую одну часть не вводят в другую. Для правильного позиционирования базы 21 достаточна лишь относительно невысокая точность движения.
Кроме того, сферическая конфигурация электрических разъемов исключает необходимость ориентации в плоскости контактов и не обуславливает какую-либо специальную ориентацию электрических разъемов при захвате вилки 10 для ее позиционирования на базе 21.
Фигура 8 схематично представляет вид поперечного сечения объекта 20 зарядного устройства 100 в соответствии с изобретением. Такой вид поперечного сечения позволяет представить одну возможную конфигурацию четвертого электрического разъема 45, расположенного в центре поверхности базы 21. Электрический разъем базы 21 в этой конфигурации является поверхностным разъемом 24. Как и на фигуре 6, магнитные разъемы 23 расположены поочередно с электрическими разъемами 45, 24, так чтобы способствовать хорошего взаимного выравнивания электрических разъемов 12 с электрическими разъемами базы 21.
Фигура 9 показывает этапы способа зарядки, реализующего работу зарядного устройства 100 по настоящему изобретению. Способ включает в себя этап 1001 позиционирования контактной поверхности 11 вилки 10 на базе 21 и этап 1002 выравнивания первого и второго электрических разъемов 22, 12.
Способ может также включать в себя этап активизации 1003 подзарядки, включающий в себя следующие этапы:
проверка наличия вилки 10 на объекте посредством детектора 33 присутствия,
измерение напряжения на выводах батареи и сравнение измеренного напряжения с минимальной величиной напряжения и с максимальной величиной напряжения,
измерение внутреннего сопротивления батареи и сравнение измеренного сопротивления с минимальной величиной сопротивления и с максимальной величиной сопротивления.
Способ также в себя включает этап 1004 окончания подзарядки, включающий в себя следующие этапы, выполняемые в указанном порядке:
отсоединение второго электрического разъема 12 и первого электрического разъема 22,
отсоединение четвертого электрического разъема 45 и третьего электрического разъема 35.
Фигура 10 представляет гуманоидного робота, выполненного с возможностью его подзарядки с помощью вилки 10 зарядного устройства 100 в соответствии с изобретением. Робот 200 на фигуре 10 взят в качестве примера гуманоидного робота, выполненного с возможностью подзарядки с помощью вилки 10 зарядного устройства 100 в соответствии с изобретением. Нижняя часть робота 200 на фигуре 10 для ходьбы не пригодна, но он может двигаться в любом направлении на своем постаменте 140, который катится по поверхности, на которой расположен робот 200. В данном примере робот 200 имеет высоту 110, которая может составлять приблизительно 120 см, глубину 120 приблизительно в 65 см и ширину 130 приблизительно в 40 см. В специальной конфигурации робот имеет планшет 150 с помощью которого он может связываться посредством сообщений (аудио, видео, интернет-страницы) со своим окружением или же получать пользовательские входные сигналы потребителя через сенсорный интерфейс планшета. В дополнение к процессору планшета робот также использует процессор своей собственной материнской платы, которая может например быть платой ATOMТМ Z530 от компании IntelТМ. Робот, благоприятно, имеет также процессор, предназначенный для обработки потоков данных между материнской платой и платами, поддерживающие магнитные датчики угла поворота, сокращенно МВД ("магнитный вращательный кодировщик"), а также датчики, управляющие двигателями суставов в конечностях, и шары, которые в варианте осуществления изобретения робот использует в качестве колес. Моторы могут быть различных видов в зависимости от амплитуды требуемого для определенного сочленения максимального вращающего момента. Например, могут использоваться коллекторные двигатели постоянного тока от компании е-minebeaТМ (например, SE24P2CTCA), или бесколлекторные двигатели постоянного тока от компании MaxonТМ (например, EC45_70W). Магнитные датчики угла поворота, предпочтительно, используют эффект Холла, с точностью в 12 или 14 битов.
Робот, показанный на фигуре 10, может содержать также датчики различных типов. Некоторые датчики используются для управления положением и перемещениями робота. Таким является, например, расположенный в туловище робота инерциальный блок, содержащий 3-осевой гироскоп и 3-осевой акселерометр. Робот может также включать в себя две двухмерных цветные RGB-фотокамеры на передней части робота (вверху и внизу) типа "система-на-чипе" (SOC), такие как фотокамеры OV5640 от компании Shenzen V-Vision Technology Ltd™, с разрешением 5 мегапикселей с частотой съемки пять кадров в секунду и с углом поля зрения приблизительно 57° по горизонтали и 44° по вертикали. Кроме того, за глазами робота может быть установлен трехмерный датчик изображения типа SOC, такой как ASUS XTION™ с разрешением 0,3 мегапикселя с частотой съемки 20 изображений в секунду и приблизительно с таким же полем зрения, что и поле зрения двухмерных фотокамер. Кроме того, робот может быть оснащен также лазерными генераторами опорных линий, например, тремя генераторами на уровне головы и тремя генераторами в основании, так чтобы он мог определять свое положение по отношению к объектам и (или) к людям в окружающем пространстве. Робот может также содержать микрофоны, чтобы иметь возможность определять звуки в своем окружении. В одном варианте осуществления в голову робота могут быть встроены четыре микрофона с чувствительностью 300 мВ/Па +/-3 дБ на частоте 1 кГц в диапазоне частот от 300 Гц до 12 кГц (-10 дБ относительно 1 кГц). Робот может также включать в себя 2 сонарных датчика, расположенных, как вариант, спереди и сзади его основания для измерения расстояния, которое отделяет его от окружающих объектов и (или) от людей. Робот может также включать в себя сенсорные датчики на голове и руках, чтобы обеспечивать взаимодействие с людьми. Он также может содержать бамперы в своем основании, чтобы защищать себя от препятствий, с которыми он сталкивается на своем пути.
Для того чтобы выражать свои эмоции и общаться с окружающими людьми, робот может также включать в себя:
- светодиоды или светоизлучающие диоды, например в глазах, в ушах и на плечах;
- динамики, например два динамика, расположенные у него в ушах.
Робот может сообщаться со своей базой или с другими роботами посредством локальных сетей Ethernet RJ45 или WiFi 802.11.
Робот может получать электропитание от литий-железо-фосфатной аккумуляторной батареи с зарядом приблизительно 400 Вт⋅ч или от литиевой полимерной трехкомпонентной (литий-кобальт-марганцевой) аккумуляторной батареи с зарядом приблизительно 400 Вт⋅ч. Робот можно подключать к зарядному устройству, соответствующему типу аккумуляторной батареи который он содержит.
Положение и движения робота управляются его двигателями, с использованием алгоритмов, которые активируются цепями, определенными в каждой конечности, и исполнительными элементами, определенными по концам каждой конечности, с учетом измерений от датчиков.
Для подзарядки посредством зарядного устройства 100 по настоящему изобретению робот 200 содержит базу 21, способную принимать в себя вилку 10. Он действует здесь как пример объекта, к которому может быть применимо зарядное устройство 100.




Изобретение относится к электротехнике. Зарядное устройство содержит объект, включающий в себя батарею и вилку (10), имеющую возможность подсоединения к источнику питания. Объект содержит базу, принимающую в себя вилку (10), содержащую первый электрический разъем и первый магнитный разъем, для позиционирования вилки (10) относительно базы. Вилка (10) содержит контактную поверхность, форма которой комплементарна форме поверхности базы, второй электрический разъем (12) для входа в контакт с первым электрическим разъемом, что обеспечивает электрический контакт между первым и вторым (12) электрическими разъемами, когда контактная поверхность помещена на поверхность базы (21), и второй магнитный разъем, расположенный вблизи контактной поверхности, притягивающий первый магнитный разъем. Технический результат заключается в обеспечении взаимного выравнивания первого и второго магнитных разъемов и поддержания надежного электрического контакта во время подзарядки батареи. 2 н. и 10 з.п. ф-лы, 10 ил.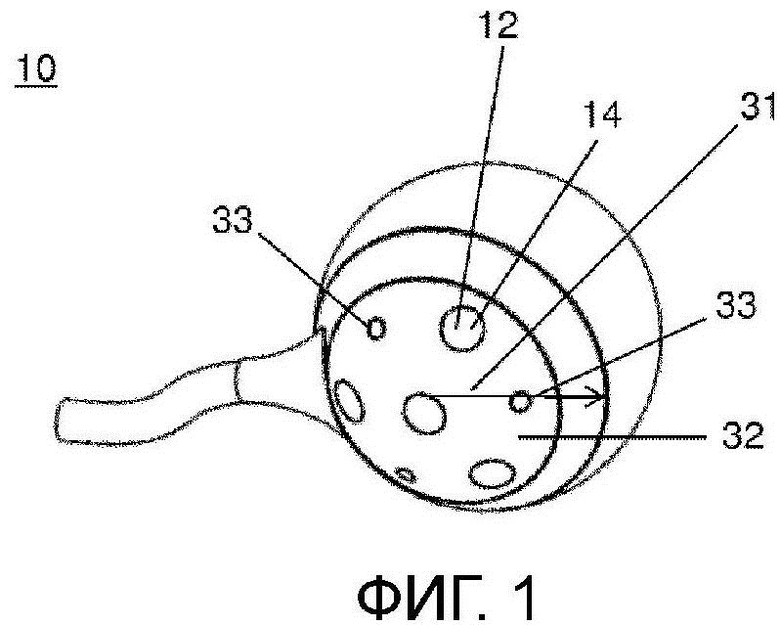
1. Зарядное устройство (100), содержащее
- объект (20), содержащий батарею,
- вилку (10), предназначенную для подзарядки батареи, причем вилка (10) имеет возможность подсоединения к источнику питания,
отличающееся тем, что объект (20) содержит
- базу (21), имеющую возможность приема в себя вилки (10), содержащей
первый электрический разъем (22),
первый магнитный разъем (23), имеющий возможность позиционирования вилки (10) относительно базы (21),
а также тем, что вилка (10) содержит
- контактную поверхность (11) с формой, комплементарной поверхности базы (21),
- второй электрический разъем (12), выполненный с возможностью входа в контакт с первым электрическим разъемом (22), чтобы обусловить электрический контакт между первым и вторым электрическими разъемами (21, 12), когда контактная поверхность (11) помещена на поверхность базы (21),
- второй магнитный разъем (13), расположенный вблизи контактной поверхности (11), с возможностью притягивания первого магнитного разъема (23), так чтобы обусловить взаимное выравнивание первого и второго магнитных разъемов (23, 13) и обеспечить электрический контакт во время подзарядки батареи,
а также тем, что один из первого и второго электрических разъемов (21, 22) является поверхностным разъемом (24), а другой из первого и второго электрических разъемов (22, 12) является точечным разъемом (14), выполненным с возможностью расположения относительно поверхностного разъема (24) с несколькими совершенно определенными ориентациями контактной поверхности (11) на базе (21),
а также тем, что вилка (10) является подсоединяемой к источнику питания посредством электрического кабеля, и тем, что вилка (10) содержит
корпус (16), к которому прикреплены второй электрический разъем (12) и второй магнитный разъем (13),
подвижную часть (17), которая является вращательно-подвижной относительно корпуса (16) для совершения непрерывного вращательного движения на 360° относительно вилки (10), причем кабель (15) закреплен на подвижной части (17) и электрически связан с разъемами (12) гибкими проводами, допускающими поворот подвижной части (17).
2. Зарядное устройство (100) по п. 1, отличающееся тем, что поверхностный разъем (24) имеет круговую форму.
3. Зарядное устройство (100) по любому из предыдущих пунктов, отличающееся тем, что оно содержит также детектор (33) присутствия, способный определять контакт между контактной поверхностью (11) и поверхностью базы (21).
4. Зарядное устройство (100) по любому из предыдущих пунктов, в котором точечный разъем (14) образует первую точку контакта (51) с контактной поверхностью (11), отличающееся тем, что устройство (100) сконфигурировано таким образом, что один из первого и второго электрических разъемов (22, 12) имеет степень свободы перемещения относительно контактной поверхности (11) вдоль первой оси (52) по существу под прямыми углами к контактной поверхности (11), проходящей через первую точку контакта (51).
5. Зарядное устройство (100) по любому из предыдущих пунктов, в котором точечный разъем (14) образует первую точку контакта (51) с контактной поверхностью (11), отличающееся тем, что устройство (100) сконфигурировано с возможностью создания усилия вдоль первой оси (52) по существу под прямыми углами к контактной поверхности (11), проходящей через первую точку (51) контакта, для обеспечения надежного электрического контакта во время подзарядки батареи.
6. Зарядное устройство (100) по любому из предыдущих пунктов, отличающееся тем, что база (21) содержит полость, имеющую форму, комплементарную форме сферической чашки, имеющую первый полюс (30) и первый радиус (31), тем, что вилка (10) имеет форму сферической чашки, имеющей второй полюс и радиус, по существу равный первому радиусу (31), и тем, что поверхностный разъем (24) центрирован на окружности, центром которой является первый полюс (30).
7. Зарядное устройство (100) по п. 6, отличающееся тем, что вилка (10) содержит третий электрический разъем (35), расположенный на втором полюсе вилки (10), тем, что база (21) содержит четвертый электрический разъем (45), расположенный на первом полюсе (30) базы (21) с возможностью входа в контакт с третьим электрический разъемом (35), для того чтобы, когда контактная поверхность (11) расположена на базе (21), допускать электрический контакт между третьим и четвертым электрическими разъемами (35, 45).
8. Зарядное устройство (100) по п. 7, отличающееся тем, что источник питания является источником питания постоянного тока с положительным полюсом и с отрицательным полюсом, тем, что третий электрический разъем (35) подсоединен к отрицательному полюсу источника питания, и тем, что второй электрический разъем (12) подсоединен к положительному полюсу источника питания.
9. Зарядное устройство (100) по любому из предшествующих пунктов, отличающееся тем, что контактная поверхность (11) содержит гибкую зону (32), имеющую некоторую степень свободы перемещения вдоль второй оси по существу под прямыми углами к первой оси (52), предназначенную для облегчения контакта второго электрического разъема (12) с первым электрическим разъемом (22), когда контактная поверхность (11) расположена на базе (21).
10. Способ подзарядки, реализующий работу зарядного устройства (100) по любому из пп. 1 - 9, отличающийся тем, что он включает в себя следующие этапы:
позиционирование контактной поверхности (11) на поверхности базы (21) (этап 1001),
взаимное выравнивание первого и второго электрических разъемов (22, 12) (этап 1002).
11. Способ подзарядки по п.10, реализующий работу зарядного устройства (100) по любому из пп. 3 - 10, отличающийся тем, что он включает в себя также этап (1003) активизации подзарядки, включающий в себя следующие этапы:
проверка наличия вилки (10) на объекте (20) посредством детектора (33) присутствия,
измерение напряжения на выводах аккумуляторной батареи и сравнение измеренного напряжения с минимальной величиной напряжения и с максимальной величиной напряжения,
измерение внутреннего сопротивления аккумуляторной батареи и сравнение измеренного сопротивления с минимальной величиной сопротивления и с максимальной величиной сопротивления.
12. Способ подзарядки по любому из пп. 10 и 11, реализующий работу зарядного устройства (100) по любому из пп. 7 - 9, отличающийся тем, что он включает в себя также этап (1004) окончания подзарядки, включающий в себя следующие этапы, выполняемые в нижеследующем порядке:
отсоединение второго электрического разъема (12) и первого электрического разъема (22),
отсоединение четвертого электрического разъема (45) и третьего электрического разъема (35).
| ВЕРТОЛЁТ | 2013 |
|
RU2533374C1 |
| CN 104485546 A, 01.04.2015 | |||
| US 2014213072 A1, 31.07.2014 | |||
| ПОВОРОТНЫЙ ЭЛЕКТРИЧЕСКИЙ ШТЕПСЕЛЬНЫЙ РАЗЪЕМ | 2004 |
|
RU2395882C2 |

