Изобретение относится к устройству обнаружения препятствий, установленному на подвижном аппарате, и находит свое применение, в частности, в области навигации. Изобретение относится также к способу обнаружения препятствий с применением такого устройства.
Во время перемещения подвижного аппарата, такого как робот, желательно избегать любого столкновения между подвижным аппаратом и препятствием, находящимся в окружающей среде, в которой перемещается подвижный аппарат, например, чтобы не повредить подвижный аппарат и/или препятствие.
В случае любого подвижного аппарата и, следовательно, робота, выполненного с возможностью передвижения, очень важно принимать во внимание безопасность подвижного аппарата и элементов в окружающей его среде. В частности, безопасность аппарата и элементов его окружения предусматривает обнаружение препятствий в окружающей среде и предупреждение столкновения с препятствиями. Существуют разные способы, позволяющие избегать столкновений. Большинство этих способов требует больших расходов по разработке и значительной вычислительной мощности, например, чтобы определять положение робота в определенной системе координат. Другие существующие способы являются очень дорогими и, следовательно, не подходят для применения в роботе.
Изобретение призвано решить все или часть вышеупомянутых проблем и предложить устройство обнаружения препятствий, находящихся в окружающей среде подвижного робота, а также способ, в котором применяют такое устройства.
В связи с этим объектом изобретения является устройство обнаружения препятствий, предназначенное для оснащения подвижного аппарата параллельно опорной плоскости, отличающееся тем, что содержит:
- так называемый первый горизонтальный излучатель первого горизонтального электромагнитного пучка, проходящего в первой виртуальной плоскости, по существу параллельной опорной плоскости,
- первый датчик изображения, выполненный с возможностью охвата поля, предназначенного для пересечения с первой виртуальной плоскостью, образуя поверхность обнаружения,
- средство анализа изображения, выполненное с возможностью обнаружения присутствия препятствия посредством обнаружения присутствия изображения на поверхности обнаружения.
Согласно варианту выполнения, аппарат имеет приоритетное направление перемещения в первом направлении вдоль оси Х, и устройство дополнительно содержит так называемый первый косой излучатель первого косого пучка, проходящего в первой виртуальной косой плоскости в первом направлении вдоль оси Х, пересекающейся с опорной плоскостью, и так называемый второй косой излучатель второго косого пучка, проходящего во второй виртуальной косой плоскости в первом направлении вдоль оси Х, пересекающейся с опорной плоскостью. Устройство содержит также первый датчик изображения, выполненный с возможностью получения изображения вокруг пересечения первой и второй виртуальных косых плоскостей с опорной плоскостью.
Согласно варианту выполнения, устройство содержит так называемый первый горизонтальный излучатель первого горизонтального электромагнитного пучка, проходящего в первой виртуальной плоскости, по существу параллельной опорной плоскости, и первый датчик изображения, выполненный с возможностью получения изображения пересечения первой виртуальной плоскости и препятствия.
Согласно другому варианту выполнения, первая виртуальная плоскость образует угловой сектор вокруг оси Х, и устройство дополнительно содержит так называемый второй горизонтальный излучатель второго горизонтального пучка, проходящего во второй виртуальной плоскости в первом направлении, образующей угловой сектор вокруг оси Y, перпендикулярной к оси Х и по существу параллельной опорной плоскости. Устройство содержит второй датчик изображения, выполненный с возможностью получения изображения пересечения второй виртуальной плоскости и препятствия. Устройство содержит так называемый третий горизонтальный излучатель третьего горизонтального пучка, проходящего в третьей виртуальной плоскости во втором направлении, противоположном первому направлению, образующей угловой сектор вокруг оси Y, по существу параллельной опорной плоскости, и третий датчик изображения, выполненный с возможностью получения изображения пересечения третьей виртуальной плоскости и препятствия.
Предпочтительно угловой сектор, образованный первым горизонтальным пучком, отстоит от угловых секторов, образованных вторым и третьим горизонтальным пучками, на заранее определенный угол.
Предпочтительно угловой сектор равен 120°.
Согласно другому варианту выполнения, устройство дополнительно содержит средства позиционирования горизонтальной виртуальной плоскости, предназначенные для позиционирования упомянутой горизонтальной виртуальной плоскости таким образом, чтобы она не пересекалась с опорной плоскостью.
Средства позиционирования могут представлять собой схему обратной связи, выполненную с возможностью определения углового положения так называемой горизонтальной виртуальной плоскости относительно опорной плоскости и передачи нового углового положения в горизонтальный излучатель, формирующий горизонтальную плоскость.
Средства позиционирования могут также представлять собой положительный угол между горизонтальной виртуальной плоскостью и опорной плоскостью.
Согласно другому варианту выполнения, устройство дополнительно содержит так называемый наклонный излучатель наклонного пучка, проходящего в виртуальной плоскости, которая может пересекаться с опорной плоскостью вдоль прямой, перпендикулярной к оси Х, и первый датчик изображения, выполненный с возможностью получения изображения прямой.
Предпочтительно пучок или пучки являются лазерными пучками.
Предпочтительно устройство содержит средства управления, выполненные с возможностью выборочной деактивации излучателей и датчиков в зависимости от направления перемещения аппарата.
Предпочтительно устройство дополнительно содержит схему обработки, выполненную с возможностью управления частотностью излучений пучков излучателями и синхронизации излучений пучков с захватом изображений датчиками.
Объектом изобретения является также аппарат, в котором применяют такое устройство.
Объектом изобретения является также способ обнаружения препятствий с применением такого устройства, отличающийся тем, что содержит следующие этапы:
- излучение пучка, формирующего виртуальную плоскость, которая может пересекаться с препятствием,
- захват и формирование изображения пересечения виртуальной плоскости и препятствия,
- анализ изображения и определение препятствия.
Согласно варианту осуществления, заявленный способ может также содержать следующие этапы:
- запоминание первого изображения пересечения виртуальной плоскости, образованной наклонным пучком, с опорной плоскостью,
- запоминание второго изображения пересечения виртуальной плоскости, образованной наклонным пучком, с опорной плоскостью,
- сравнение первого и второго изображений, чтобы определить место нахождения препятствия.
Подвижный аппарат является, например, роботом. Этот робот может иметь колеса для обеспечения своего перемещения по опорной плоскости. Изобретение можно также применять для робота-гуманоида, перемещающегося при помощи ног.
В альтернативном варианте подвижный аппарат может быть аппаратом любого типа, перемещающимся параллельно опорной плоскости либо в контакте с опорной плоскостью, либо на воздушных подушках.
Объектом изобретения является также робот-гуманоид, содержащий заявленное устройство обнаружения.
Под роботом-гуманоидом следует понимать робот, имеющий сходство с человеческим телом. Речь может идти о верхней части корпуса, или только о шарнирной руке, заканчивающейся захватом, похожим на человеческую кисть. В настоящем изобретении верх корпуса подобен верхней части человеческого туловища. Заявленное устройство обнаружения позволяет определять препятствия в окружающей среде робота.
Изобретение и его другие преимущества будут более очевидны из нижеследующего подробного описания варианта выполнения, представленного в качестве примера, со ссылками на прилагаемые чертежи, на которых:
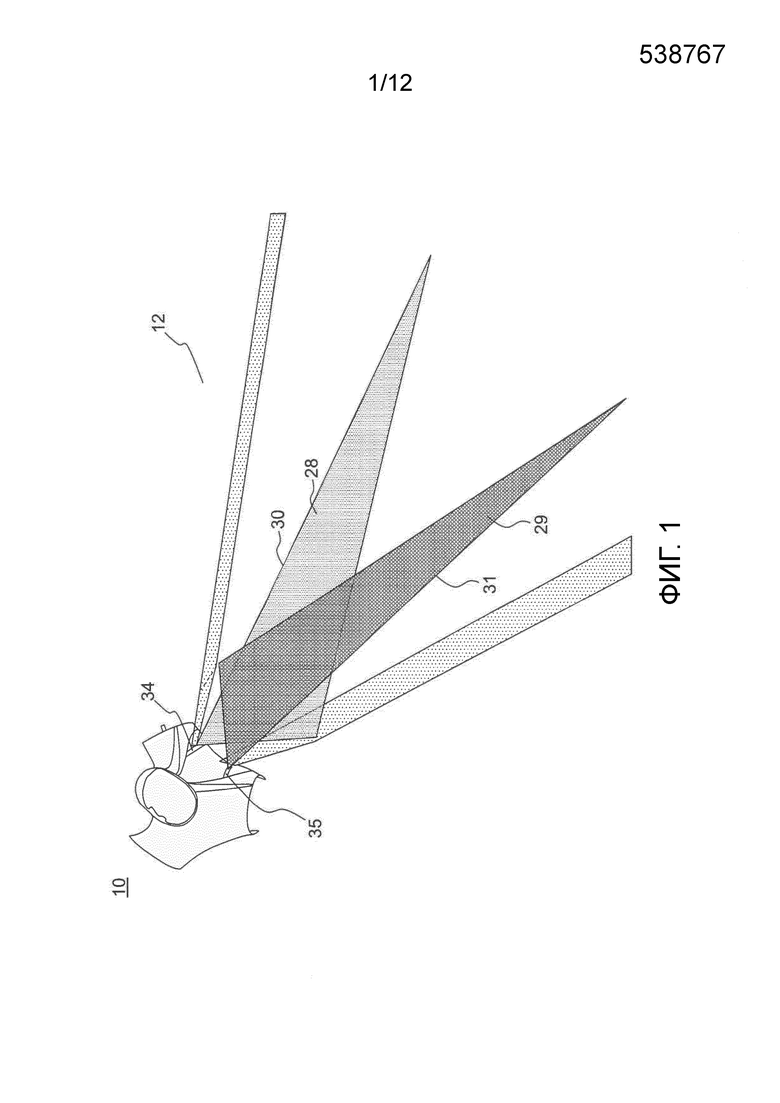
Фиг. 1 - виртуальные плоскости, образованные пучками.
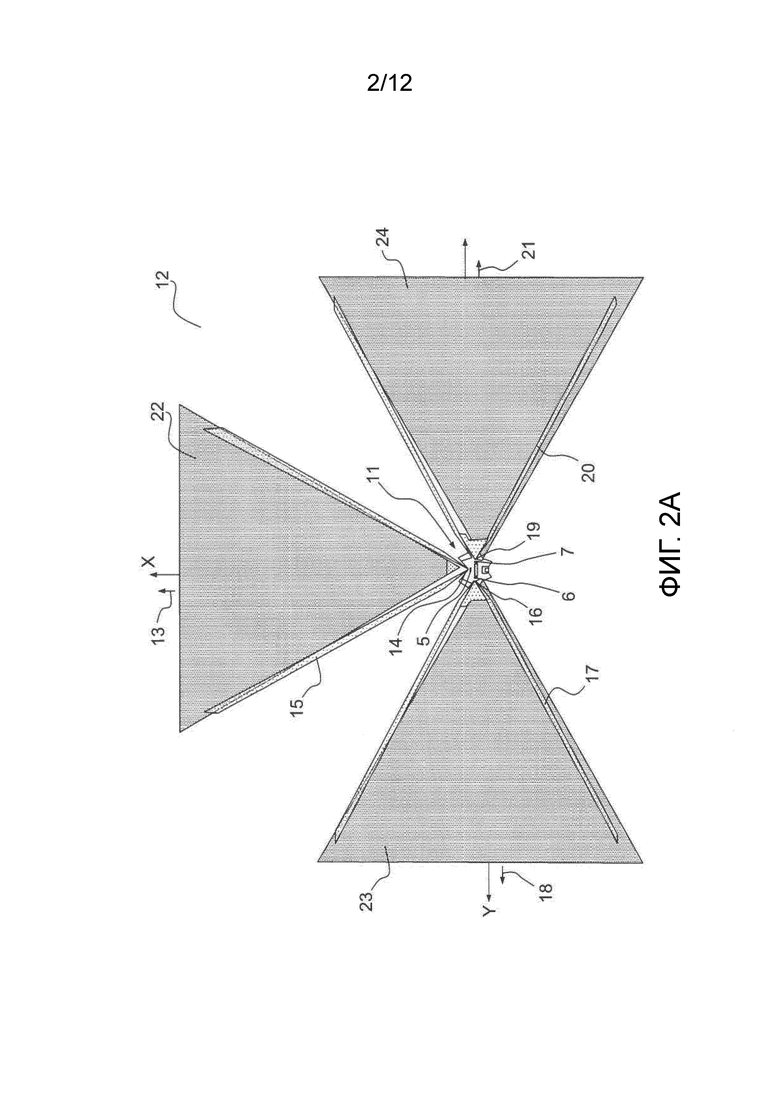
Фиг. 2а - вид сверху заявленного устройства с показом виртуальных плоскостей пучков, параллельных опорной плоскости.
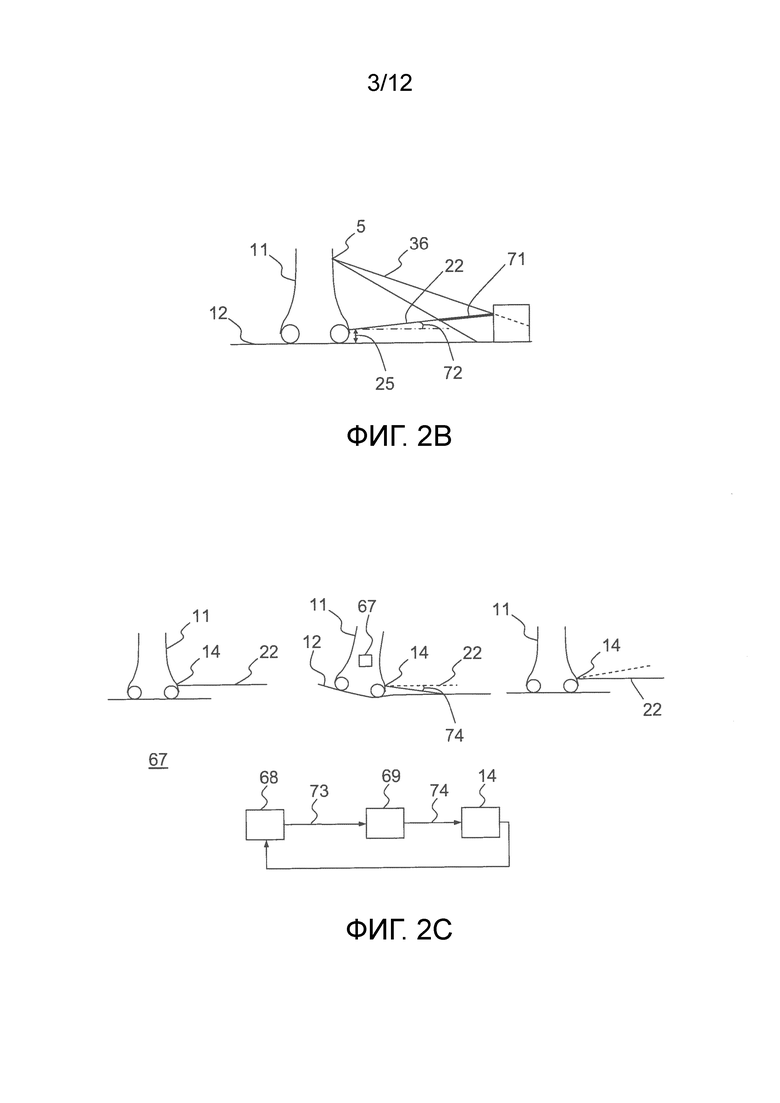
Фиг. 2b - вид в разрезе заявленного устройства с показом виртуальной плоскости пучка, по существу параллельной опорной плоскости.
Фиг. 2с - схема обратной связи, позволяющая корректировать угловое положение виртуальной плоскости относительно опорной плоскости.
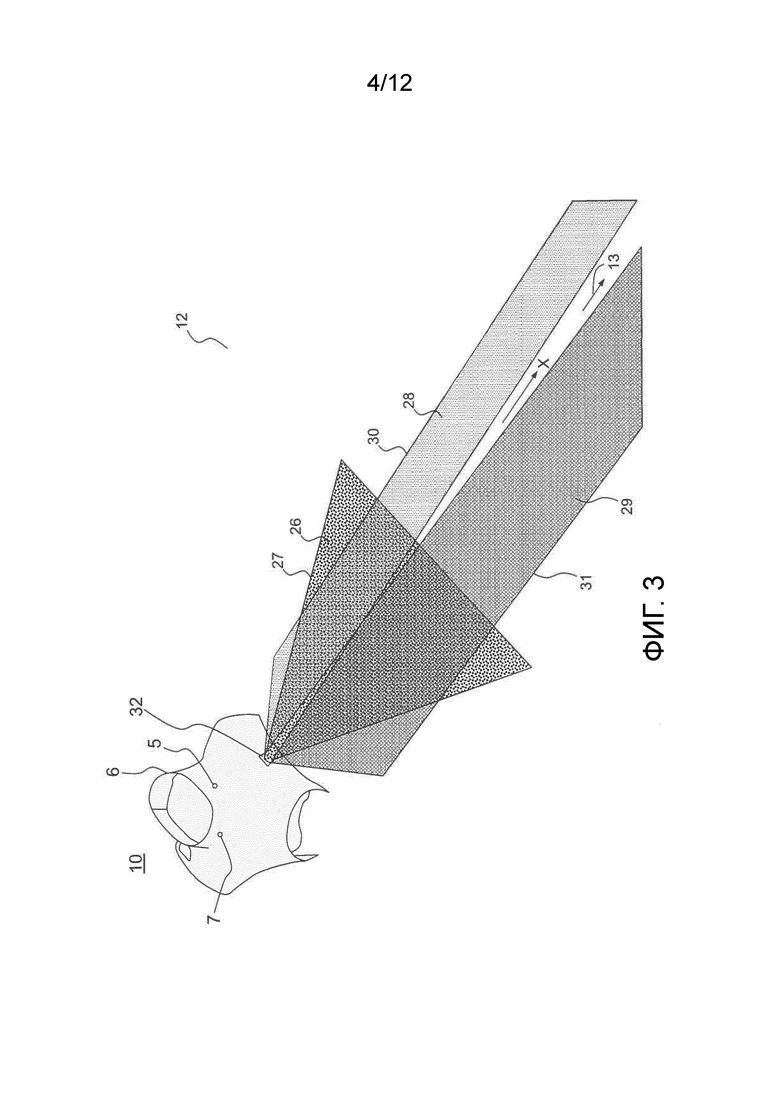
Фиг. 3 - виртуальная плоскость, образованная одним пучком, и виртуальные плоскости, образованные двумя пучками.
Фиг. 4а,4b,4с - пересечение виртуальной плоскости с препятствием в соответствии с изобретением.
Фиг. 5 - виртуальные плоскости, образованные пучками, а также поле, охватываемое аппаратом захвата изображений.
Фиг. 6 - излучатель пучка, образующего виртуальную плоскость.
Фиг. 7 - робот-гуманоид, в котором применяют заявленное устройство обнаружения препятствий.
Фиг. 8 - пример цоколя, содержащего колеса, для робота-гуманоида, в котором применяют заявленное устройство обнаружения препятствий.
Фиг. 9 - схема процессора, обеспечивающего функции обработки и синхронизации излучений пучков и захваченных изображений.
Фиг. 10 - схема этапов заявленного способа обнаружения препятствий.
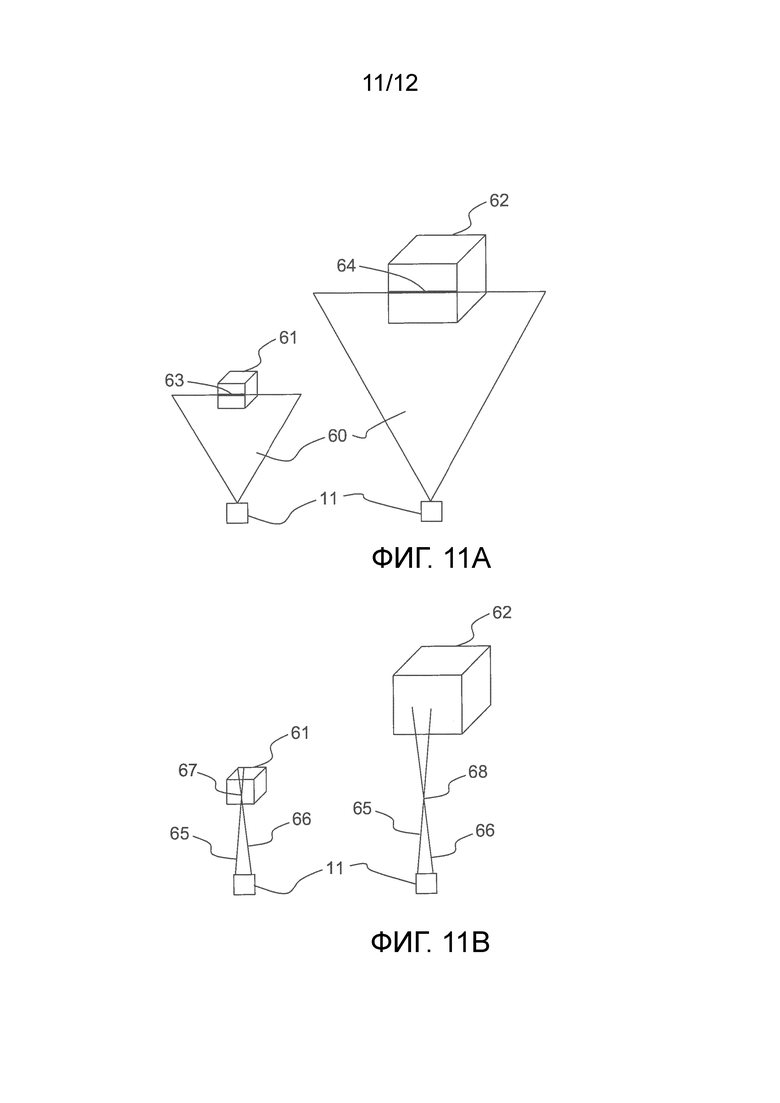
Фиг. 11а и 11b - две конфигурации обнаружения препятствий.
Фиг. 12 - вид сбоку заявленного устройства с показом горизонтальных, косой и наклонной виртуальных плоскостей.
Для большей ясности одни и те же элементы на разных чертежах имеют одинаковые обозначения.
В рамках заявки изобретение описано на примере применения для робота, в частности для робота, перемещающегося при помощи колес. Однако изобретение можно применять для любого подвижного аппарата. Подвижный аппарат 11 имеет приоритетное направление перемещения в первом направлении вдоль оси Х.
На фиг. 1 показано заявленное устройство 10. Устройство 10 обнаружения препятствий, предназначенное для оснащения подвижного аппарата 11 параллельно опорной плоскости 12, содержит по меньшей мере два излучателя 34, 35 электромагнитного пучка, выполненных с возможностью формирования двух виртуальных плоскостей в двух разных направлениях, которые могут пересекаться с возможным препятствием, по меньшей мере один датчик 5 изображения (на фиг. 1 не показан), выполненный с возможностью получения изображения пересечения виртуальных плоскостей и препятствия, средство 66 анализа изображения (на фиг. 1 не показано), выполненное с возможностью определения препятствия и сравнения изображения с контрольным изображением. Иначе говоря, образованные виртуальные плоскости пересекают опорную плоскость 12 и образуют, таким образом, прямую линию. В присутствии препятствия линия деформируется, и эта деформация линии свидетельствует о присутствии препятствия. Таким образом, проецируют виртуальную плоскость, наблюдают полученное изображение и обнаруживают препятствие по деформации линии пересечения между виртуальной плоскостью и препятствием.
На фиг. 1 показаны виртуальные плоскости 28, 29, полученные при помощи так называемых косых излучателей 34, 35. Устройство содержит первый косой излучатель 34 первого косого пучка 30, проходящего в первой косой виртуальной плоскости 28 в первом направлении вдоль оси Х, пересекающейся с опорной плоскостью 12. Устройство 10 содержит второй косой излучатель 35 второго косого пучка 31, проходящего во второй косой виртуальной плоскости 29 в первом направлении вдоль оси Х, пересекающейся с опорной плоскостью 12. Первый датчик 5 изображения выполнен с возможностью получения изображения вокруг пересечения косых виртуальных плоскостей 28, 29 с опорной плоскостью 12.
На фиг. 2а, где представлен вид сверху заявленного устройства, показаны виртуальные плоскости пучков, параллельных опорной плоскости 12.
Устройство 10 содержит первый так называемый горизонтальный излучатель 14 первого горизонтального пучка 15, проходящего в первой виртуальной плоскости 22, по существу параллельной относительно опорной плоскости 12, и первый датчик 5 изображения, выполненный с возможностью получения изображения пересечения первой виртуальной плоскости 22 и препятствия.
Поскольку подвижный аппарат 11 имеет приоритетное направление движения в первом направлении вдоль оси Х, первая виртуальная плоскость 22 образует угловой сектор вокруг оси Х, и устройство 10 дополнительно содержит второй так называемый горизонтальный излучатель 16 второго горизонтального пучка 17, проходящего во второй виртуальной плоскости 23 в первом направлении, образующей угловой сектор вокруг оси Y, перпендикулярной к оси Х, и по существу параллельной опорной плоскости 12. Устройство 10 содержит второй датчик 6 изображения, выполненный с возможностью получения изображения пересечения второй виртуальной плоскости 23 и препятствия. Устройство 10 содержит третий так называемый горизонтальный излучатель 19 третьего горизонтального пучка 20, проходящего в третьей виртуальной плоскости 24 во втором направлении, противоположном первому направлению, образующей угловой сектор вокруг оси Y и по существу параллельной опорной плоскости 12. Устройство 10 содержит третий датчик 7 изображения, выполненный с возможностью получения изображения пересечения третьей виртуальной плоскости 24 и препятствия.
Предпочтительно угловой сектор 22, образованный первым горизонтальным пучком 15 отстоит от угловых секторов 23, 24, образованных вторым и третьим горизонтальными пучками 17, 20, на заранее определенный угол.
Угловой сектор может быть равен 60°, а заранее определенный угол - 30°. Можно также получить угловой сектор 90°. Предпочтительно угловой сектор равен 120°, а заранее определенный угол - 0°. Эта конфигурация обеспечивает полный охват окружающего пространства вокруг подвижного аппарата 11.
Первый, второй и третий горизонтальные излучатели 14, 16, 19 расположены на подвижном аппарате 11 на определенной высоте 25 от опорной плоскости 12 (см. фиг. 2b). Высота 25 может составлять, например, 15 см или 10 см. Чтобы обнаруживать небольшие препятствия высота 25 должна составлять 5 или 3 см. Виртуальные плоскости 22, 23, 24 формируемые излучателями 14, 16, 19 могут пересекаться с препятствием, находящимся на высоте, превышающей высоту 25, или с препятствием, часть которого находится на уровне виртуальных плоскостей 22, 23 или 24. Излучатели 14, 16, 19 обеспечивают обнаружение препятствий, которое можно назвать панорамным обнаружением.
Датчик 5 изображения может быть так называемым «широкоугольным» датчиком изображения, обеспечивающим самостоятельно захват трех виртуальных плоскостей 22, 23, 24.
На фиг. 2b представлен вид в разрезе заявленного устройство, где показана виртуальная плоскость 22 пучка 15, по существу параллельная опорной плоскости 12. В данном случае описана виртуальная плоскость 22, но это же относится и к виртуальным плоскостям 23 и 24.
Предпочтительно заявленное устройство обнаружения содержит средства 67 таким образом, чтобы виртуальная плоскость 22 всегда находилась над опорной плоскостью 12 в поле 36, охватываемом датчиком 5 изображения.
Средства 67, обеспечивающие, чтобы виртуальная плоскость 22 всегда находилась над опорной плоскостью 12 в поле 36, могут представлять собой схему обратной связи, которая позволяет ориентировать излучатель 14 пучка 15 таким образом, чтобы ориентировать виртуальную плоскость 22 в зависимости от ее ориентации, когда подвижный аппарат 11 находится в движении. Таким образом, если подвижный аппарат 11 передвигается по опорной плоскости, содержащей неровности, как показано на фиг.2с, виртуальная плоскость 22 будет пересекать опорную плоскость 12. Гироскоп 68 может определять угловое положение 73 виртуальной плоскости 22 относительно опорной плоскости 12. Средство анализа 69 в схеме обратной связи получает эту информацию, передает новое угловое положение 74 в излучатель 14, который при этом ориентируется таким образом, чтобы расположить виртуальную плоскость 22 над опорной плоскостью 12. Когда подвижный аппарат 11 опять перемещается по абсолютно плоской поверхности, средства 69 анализа передают в излучатель 14 новое угловое положение, чтобы виртуальная плоскость 22 опять расположилась по существу параллельно опорной плоскости 12.
Согласно другой конфигурации, средства позиционирования представляют собой угол 72 между горизонтальной виртуальной плоскостью 22 и опорной плоскостью 12. Таким образом, виртуальная плоскость 22 может быть слегка ориентирована вверх. Иначе говоря, она образует положительный угол 72 с опорной плоскостью 12. Таким образом, виртуальная плоскость 22 никогда не пересекается с опорной плоскостью 12, даже если подвижный аппарат 11 находится в движении. Датчик 5 изображения выполнен с возможностью получения изображения пересечения виртуальной плоскости 22 и возможного препятствия.
Таким образом, можно получить поверхность 71 обнаружения, которая соответствует пересечению виртуальной плоскости 22 и конуса, образованного полем, охватываемым датчиком 5 изображения. Виртуальная плоскость 22 может сама пересекаться с возможным препятствием, которое приблизительно имеет высоту, превышающую или равную высоте 25, и которое может находиться в бесконечности. С учетом положительного угла 72 и поля 36 датчика 5 изображения, поверхность 71 обнаружения находится вблизи подвижного аппарата 11. Следовательно, обнаружение возможного препятствия соответствует обнаружению появления изображения на уровне поверхности 71 обнаружения.
Косые пучки 30, 31 могут пресекаться с небольшими препятствиями, выемками или препятствиями большего размера, с которыми горизонтальные пучки 15, 17, 20 не могли бы пересечься.
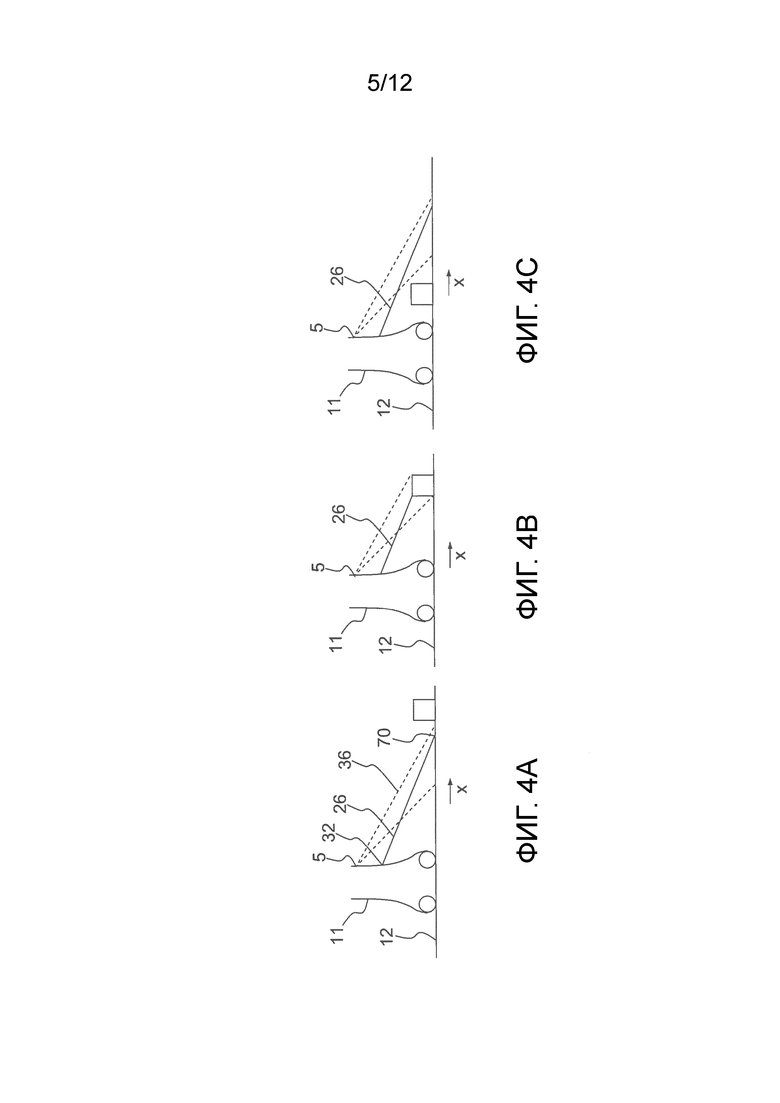
На фиг. 3 показана виртуальная плоскость 26, образованная наклонным пучком 27, излучаемым так называемым наклонным излучателем 32. Устройство 10 содержит так называемый наклонный излучатель 32 наклонного пучка 27, проходящего в виртуальной плоскости 26, которая может пересекаться с опорной плоскостью 12 по прямой, перпендикулярной к оси Х. Первый датчик 5 изображения выполнен с возможностью получения изображения прямой, получаемой при пересечении виртуальной плоскости 26 и опорной плоскости 12. Виртуальная плоскость 26, формируемая излучателем 32, может пересекаться с препятствием, находящимся на высоте, соответствующей расстоянию 33 между виртуальной плоскостью 26 и опорной плоскостью 12. Речь может идти о препятствии большого размера или небольшого размера, находящемся на опорной плоскости 12. Особый интерес это представляет для препятствий, высота который меньше высоты 25, отделяющей опорную плоскость 12 от горизонтальной виртуальной плоскости. В качестве примера препятствий можно указать выемку или дверной упор.
На фиг. 4а, 4b и 4с показано пересечение виртуальной плоскости 26 с препятствием в соответствии с изобретением. Аппарат 11 движется параллельно опорной плоскости 12. Наклонный излучатель 32 наклонного пучка 27 расположен в виртуальной плоскости 26. Виртуальная плоскость 26 может пересекаться с опорной плоскостью 12 по прямой 70, перпендикулярной к оси Х, как показано на фиг. 4а.
Иначе говоря, виртуальная плоскость 26, образованная наклонным пучком 27, может осуществлять сканирование опорной плоскости 12. Датчик 5 изображения выполнен с возможностью получения изображения прямой 70. Средство анализа изображения выполнено с возможностью определения присутствия препятствия, при этом средство анализа выполнено также с возможностью сравнения изображения, снятого датчиком 5, с контрольным изображением. Таким образом, речь идет о проекции линии на опорную плоскость 12 в поле 36 датчика 5 изображения. Использование виртуальной плоскости 26 в моментальном режиме позволяет обнаружить в присутствии препятствия деформацию линии 70. Кроме того, можно сохранить в памяти все, что находится в объеме между виртуальной плоскостью 26 и опорной плоскостью 12. Таким образом, при использовании в сочетании со временем (то есть с последовательными положениями подвижного аппарата 11) и с запоминанием известно, когда препятствие оказывается в окружающей среде подвижного аппарата 11. Иначе говоря, можно сохранить в памяти первое изображение и второе изображение в разные моменты пересечения виртуальной плоскости 26, образованной наклонным пучком 27, с опорной плоскостью 12. Для определения места нахождения препятствия производят сравнение первого и второго изображений. Определение места нахождения препятствия можно осуществлять в неподвижной системе координат или в системе координат, связанной с подвижным аппаратом 11. Это обнаружение и определение места нахождения препятствия можно осуществлять, когда подвижный аппарат перемещается в первом направлении вдоль оси Х, а также в направлении, противоположном первому направлению (то есть перемещается передним ходом или задним ходом). При этом можно замедлить движение подвижного аппарата 11, остановить его до столкновения с препятствием или отклонить его траекторию. Наконец, в крайнем случае исчезновения линии 70 это значит, что подвижный аппарат находится вблизи обрыва или ступеньки лестницы, так как датчик 5 изображения больше не может получать изображение прямой 70, которая в этом случае находится ниже относительно опорной плоскости 12. Напротив, как только датчик 5 изображения получает возможность снять изображение, то есть излом виртуальной плоскости 26, это значит, что либо подвижный аппарат 11 может двигаться вперед или назад по опорной плоскости 12, не рискуя свалиться вниз (обрыв, лестница,…), либо подвижный аппарат 11 находится в присутствии препятствия поблизости.
Следует отметить, что наклонный пучок можно использовать отдельно, независимо от других косых и горизонтальных пучков. Точно так же, можно использовать только косые пучки. Наконец, можно использовать несколько пучков одновременно, например, наклонный пучок с горизонтальным пучком, наклонный пучок с косым пучком, косой пучок с горизонтальным пучком или любую другую комбинацию из 2 или нескольких пучков.
Таким образом, шесть пучков 15, 17, 20, 27, 30, 31 позволяют устройству 10 получить пересечение с виртуальными плоскостями и любым препятствием, находящимся в ближайшем окружении.
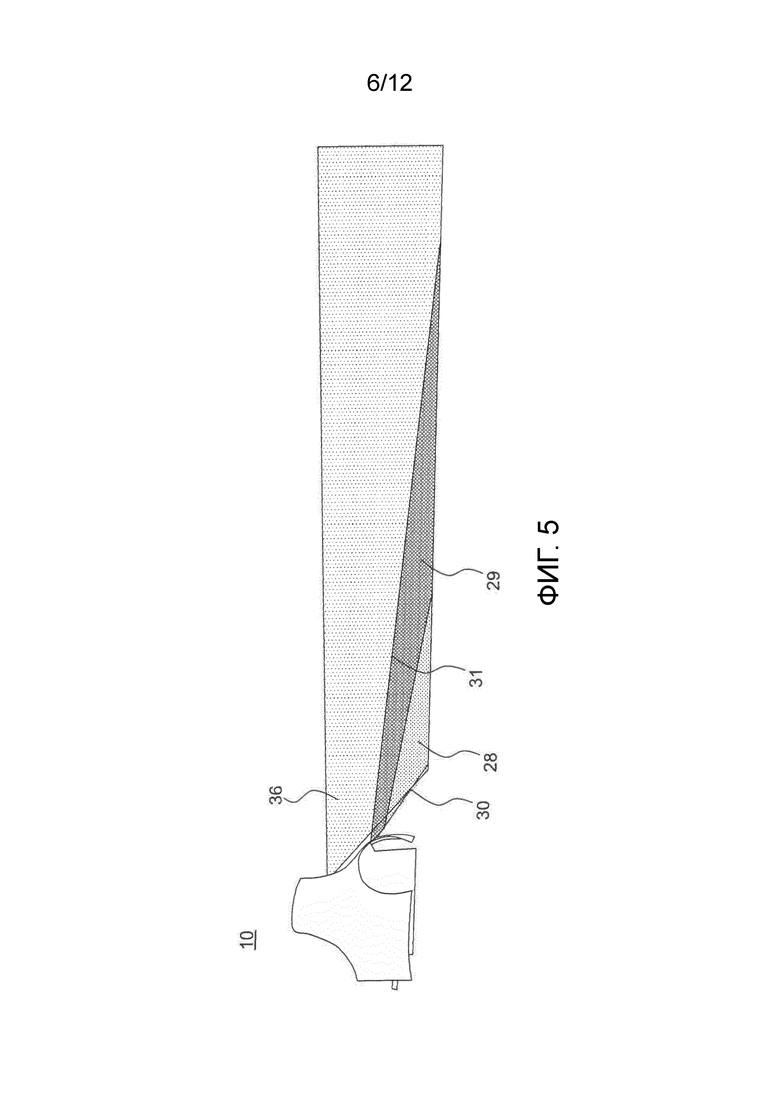
На фиг. 5 показан вид сбоку виртуальных плоскостей 28, 29, образованных косыми пучками 30, 31, а также поле 36, охватываемое датчиком 5 изображения. Виртуальные плоскости 28, 29, образованные соответственно пучками 30, 31, могут пересекаться с препятствием. При этом датчик 5 изображения может получить изображение пересечения виртуальной плоскости или виртуальных плоскостей 28, 29 с препятствием. Средство анализа изображения (на фигуре не показано) выполнено с возможностью определения препятствия и с возможностью сравнения полученного изображения с контрольным изображением.
В частности, виртуальные плоскости 26, 28, 29 пересекаются с контрольной плоскостью 12 (которая соответствует в большинстве случаев земле, по которой перемещается подвижный аппарат 11) и образуют, таким образом, прямую линию. В присутствии препятствия образованная таким образом линия искажается, и это искажение линии является свидетельством присутствия препятствия.
Необходимо отметить, что датчик 5 изображения, который является, например, камерой, предпочтительно синхронизирован с излучателями пучков, что позволяет активировать излучатели пучков только в течение времени экспонирования датчика 5 изображения. Следует также учитывать разницу между моментом принятия решения об экспонировании (например, при помощи процессора PROC, расположенного в подвижном аппарате 11), и моментом, когда датчик изображения может действительно снять изображение.
Предпочтительно также управлять частотностью всех приборов, излучающих пучки, при помощи общего импульса. Эта синхронизация позволяет избежать интерференций между различными пучками, что могло привести к получению ненадлежащей информации прибором захвата изображения и анализа изображения.
Для этого, как показано на фиг. 9, устройство 10 содержит средства 8 управления, выполненные с возможностью выборочной деактивации излучателей и датчиков в зависимости от направления перемещения аппарата 11. Это позволяет снизить потребление энергии устройством 10.
Устройство 10 содержит также схему 9 обработки, выполненную с возможностью управления частотностью излучений пучков излучателями и синхронизации излучений пучков с захватом изображений датчиками. Таким образом, пучки излучаются один за другим или одновременно в зависимости от конфигурации, в которой находится подвижный аппарат 11. При каждом излучении пучка соответствующий датчик изображения производит захват. Например, для получения панорамного обзора окружающей среды подвижного аппарата 11, все три пучка 15, 17, 20 излучаются одновременно, и все три датчика 5, 6, 7 изображения получают, каждый, изображение. Если требуется осуществить обзор приоритетного направления перемещения вдоль оси Х, излучение первого горизонтального пучка можно осуществить до излучения так называемого наклонного пучка, и соответствующий датчик 5 изображения активируют с такой частотностью, чтобы произвести первый захват одновременно с излучением горизонтального пучка, затем второй захват одновременно с излучением наклонного пучка.
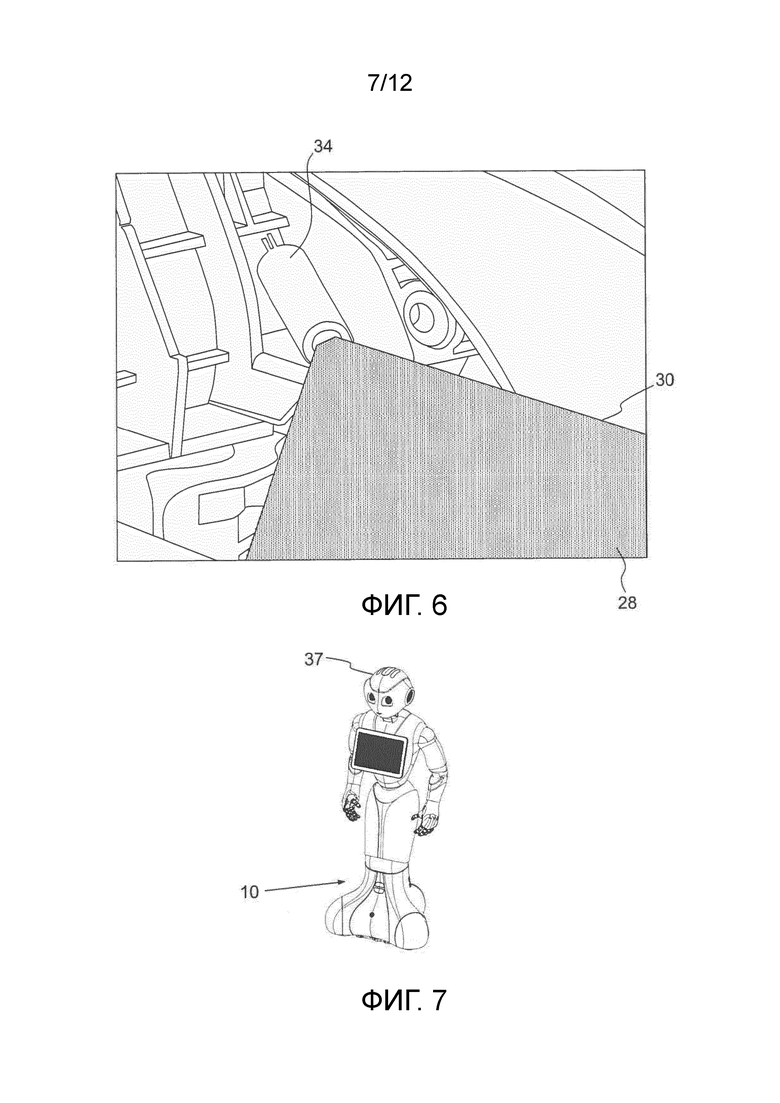
На фиг. 6 показан излучатель 34, излучающий пучок 30, который может образовать виртуальную плоскость 28. Предпочтительно излучатели пучков закреплены на подвижном аппарате 11, чтобы избежать присутствия подвижных деталей в и/или на подвижном аппарате 11. Крепление излучателей пучков обеспечивает надежность во время транспортировки подвижного аппарата 11 и позволяет избегать вибраций детали во время движения.
Предпочтительно пучок или пучки являются лазерными пучками.
Заявленное устройство 10 может также содержать средство контроля экспозиции, которое может представлять собой алгоритм улучшения контраста между светом излучаемого пучка и окружающей средой. Такое средство контроля позволяет, в частности, устройству 10 рассматривать только так называемую зону безопасности в ближнем окружении подвижного аппарата 11. Это позволяет повысить точность определения препятствия.
Поскольку деталь невозможно выполнить с исключительно точными геометрией и размерами, то, чтобы деталь могла при этом выполнять свои функции в механизме, определяют допуски (размерные, геометрические). Эти допуски могут влиять на точность измерений. Устройство 10 может иметь механизм калибровки угла наклона датчика 5 изображения и угла наклона излучателей 14, 16, 19 пучков 15, 17, 20. Как правило, такой механизм калибровки применяют в известной окружающей среде, и он обеспечивает высокую точность измерений и, следовательно, определения препятствия.
На фиг. 7 показан робот-гуманоид 37, в котором применяют заявленное устройство 10 обнаружения препятствий.
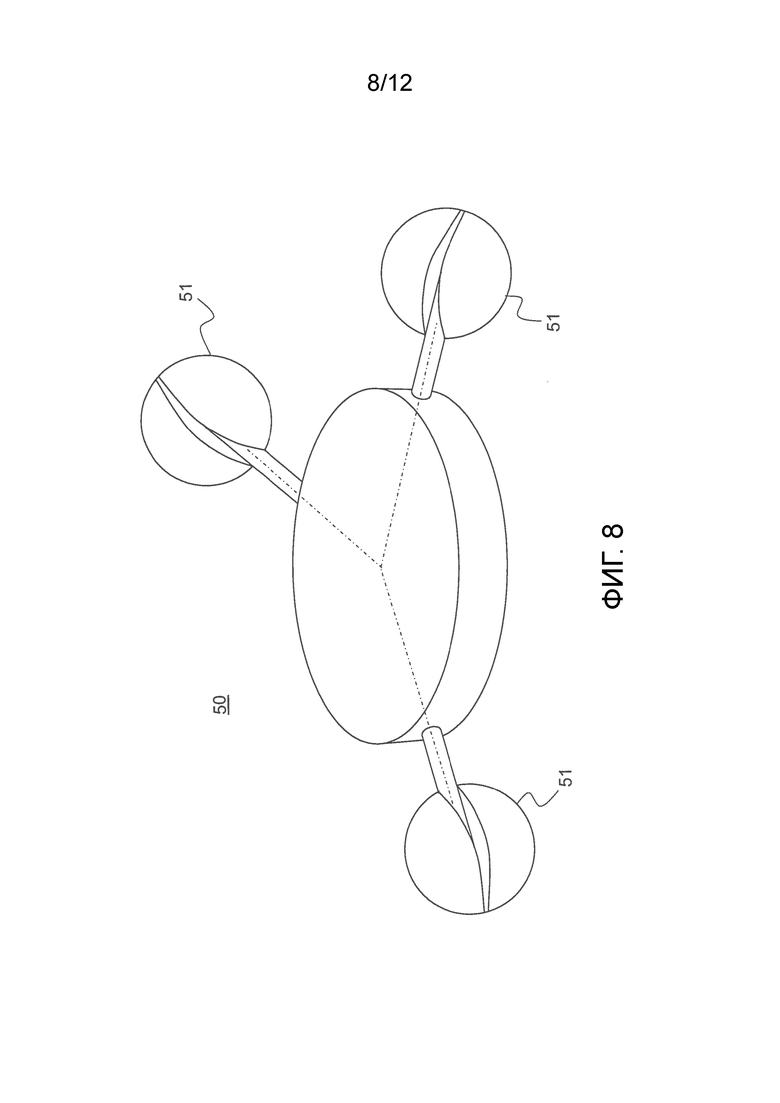
На фиг. 8 показан пример цоколя 50, содержащего колеса 51, для робота-гуманоида, в котором применяют заявленное устройство 10 обнаружения препятствий.
На фиг. 9 показана схема процессора PROC, обеспечивающего функции обработки и синхронизации излучений пучков и захватов.
На фиг. 10 показана схема этапов заявленного способа обнаружения препятствий. Способ обнаружения использует описанное выше устройство обнаружения. Он содержит следующие этапы:
- Излучение пучка, который может образовать виртуальную плоскость, пересекающуюся с препятствием (этап 100),
- Захват и формирование изображения пересечения виртуальной плоскости и препятствия (этап 110),
- Анализ изображения и определение препятствия (этап 120).
Кроме того, способ содержит следующие этапы:
- запоминание первого изображения пересечения виртуальной плоскости (26), образованной наклонным пучком (27), с опорной плоскостью (12) (этап 130),
- запоминание второго изображения пересечения виртуальной плоскости (26), образованной наклонным пучком (27), с препятствием (этап 130),
- сравнение первого и второго изображений (этап 140), чтобы определить место нахождения препятствия (этап 150).
На фиг. 11а и 11b показаны две конфигурации обнаружения препятствий. На фиг. 11а с препятствием пересекается только одна виртуальная плоскость 60. На фиг. 11b две виртуальные плоскости 65, 66 пересекаются между собой и с препятствием при применении заявленного устройства обнаружения. В обеих конфигурациях присутствуют два подобных препятствия 61, 62 (два куба в представленном примере): одно препятствие 61 является небольшим и находится близко к подвижному аппарату 11, второе препятствие 62 является большим и удалено дальше от подвижного аппарата 11. На фиг. 11а виртуальная плоскость 60 пересекается с малым кубом 61. Точно так же, виртуальная плоскость 60 пересекается с большим кубом 62. Пересечение 63 между виртуальной плоскостью 60 и малым кубом 61 и пересечение 64 между виртуальной плоскостью 60 и большим кубом 62 образуют, каждое, линию. Несмотря на разницу размера двух кубов 61, 62 и на удаление большого куба 62 по сравнению с малым кубом 61 относительно подвижного аппарата 11, датчик изображения воспринимает обе линии пересечения 63, 64 одинаково. На фиг. 11b две виртуальные плоскости 65, 66 пересекаются между собой и с малым кубом 61, ближним к подвижному аппарату 11, образуя линию пересечения 67. Две виртуальные плоскости 65, 66 тоже пересекаются между собой, но не пересекаются с большим кубом 62, слишком удаленным, чтобы пересечение 68 между двумя виртуальными плоскостями 65, 66 совпало с пересечением с большим кубом 62. Таким образом, обнаружение препятствия при помощи двух виртуальных плоскостей, проходящих в разных направлениях и пересекающихся между собой, позволяет точнее обнаруживать препятствие.
После определения препятствия (этап 120) подвижный аппарат 11 может произвести новое действие. Например, можно указать действие навигации с изменением траектории или остановку. Заявленное устройство 10 может также содержать библиотеку контрольных изображений. Эти контрольные изображения соответствуют заранее определенным изображениям, позволяющим, кроме обнаружения препятствий, распознавать препятствия путем сравнения изображения, полученного датчиком 5 изображения, с контрольным изображением. Осуществляемый таким образом анализ изображения позволяет подвижному аппарату 11 распознать свою базу зарядки и направиться к ней, чтобы подзарядить свою батарею.
На фиг. 12 представлен вид сбоку заявленного устройства 10 с показом горизонтальных (показана только плоскость 22), косых 28, 29 и наклонной виртуальных плоскостей.
Предпочтительно после захвата и определения препятствия (этап 110) место нахождения препятствия передают в виде декартовых координат в системе координат, содержащей оси Х и Y. Это позволяет уплотнить передаваемые данные.
Наконец, можно уменьшить разрешение изображений, снимаемых датчиком изображения, чтобы снизить стоимость устройства 10. Можно также управлять всеми излучателями пучков и датчиками изображения при помощи только одного процессора, что тоже позволяет снизить стоимость устройства 10.



Изобретение относится к области навигации. Устройство и способ обнаружения препятствий предназначено для оснащения подвижного аппарата, перемещающегося параллельно опорной плоскости, и содержит: три горизонтальных излучателя электромагнитных пучков, проходящих в трех виртуальных плоскостях; три датчика изображений, выполненных с возможностью охвата поля. Первый датчик изображения выполнен с возможностью охвата поля, предназначенного для пересечения с первой виртуальной плоскостью, которая образует угловой сектор вокруг оси Х. Второй горизонтальный излучатель второго горизонтального пучка проходит во второй виртуальной плоскости в первом направлении, образующей угловой сектор вокруг оси Y, перпендикулярной к оси Х, и, по существу, параллельно опорной плоскости. Третий горизонтальный излучатель третьего горизонтального пучка проходит в третьей виртуальной плоскости во втором направлении, противоположном первому направлению, образующей угловой сектор вокруг оси Y, по существу, параллельно опорной плоскости. Также имеется средство анализа изображения, выполненное с возможностью определения присутствия препятствия посредством обнаружения присутствия изображения на поверхности обнаружения. Технический результат – обеспечение возможности обнаружения препятствий в окружающей среде и предупреждение столкновения с препятствиями. 3 н. и 11 з.п. ф-лы, 12 ил.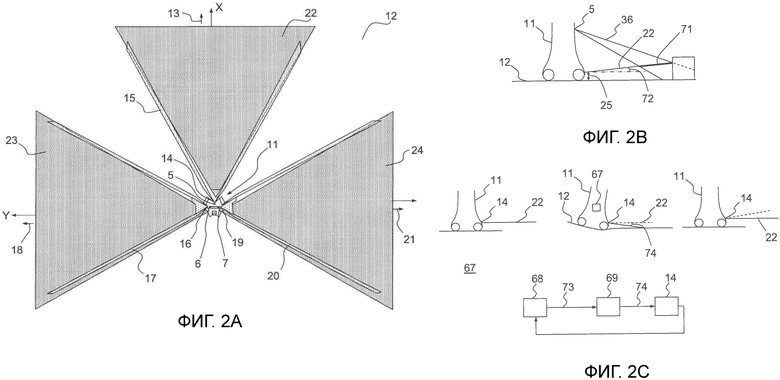
1. Устройство (10) обнаружения препятствий, предназначенное для оснащения подвижного аппарата (11), имеющего приоритетное направление перемещения в первом направлении вдоль оси Х, параллельно опорной плоскости (12), отличающееся тем, что содержит:
первый горизонтальный излучатель (14) первого горизонтального электромагнитного пучка (15), проходящего в первой виртуальной плоскости (22), по существу параллельной опорной плоскости (12),
первый датчик (5) изображения, выполненный с возможностью охвата поля (36), предназначенного для пересечения с первой виртуальной плоскостью (22), образуя поверхность (71) обнаружения,
средство анализа изображения, выполненное с возможностью определения присутствия препятствия посредством обнаружения присутствия изображения на поверхности (71) обнаружения,
тем, что первая виртуальная плоскость (22) образует угловой сектор вокруг оси Х, и тем, что устройство (10) дополнительно содержит:
второй горизонтальный излучатель (16) второго горизонтального пучка (17), проходящего во второй виртуальной плоскости (23) в первом направлении, образующей угловой сектор вокруг оси Y, перпендикулярной к оси Х, и, по существу, параллельно опорной плоскости (12),
второй датчик (6) изображения, выполненный с возможностью формирования изображения пересечения второй виртуальной плоскости (23) и препятствия,
третий горизонтальный излучатель (19) третьего горизонтального пучка (20), проходящего в третьей виртуальной плоскости (24) во втором направлении, противоположном первому направлению, образующей угловой сектор вокруг оси Y, по существу, параллельно опорной плоскости (12),
третий датчик (7) изображения, выполненный с возможностью формирования изображения пересечения третьей виртуальной плоскости (24) и препятствия.
2. Устройство (10) по п. 1, отличающееся тем, что аппарат (11) дополнительно содержит:
первый косой излучатель (34) первого косого пучка (30), проходящего в первой виртуальной косой плоскости (28) в первом направлении вдоль оси Х, пересекающейся с опорной плоскостью (12),
второй косой излучатель (35) второго косого пучка (31), проходящего во второй виртуальной косой плоскости (29) в первом направлении вдоль оси Х, пересекающейся с опорной плоскостью (12),
и тем, что первый датчик (5) изображения выполнен с возможностью формирования изображения вокруг пересечения первой и второй виртуальных косых плоскостей (28,29) с опорной плоскостью (12).
3. Устройство (10) по одному из предыдущих пунктов, отличающееся тем, что угловой сектор (22), образованный первым горизонтальным пучком (15), отстоит от угловых секторов (23,24), образованных вторым и третьим горизонтальными пучками (17,20), на заданный угол.
4. Устройство (10) по п. 3, отличающееся тем, что угловой сектор равен 120°.
5. Устройство (10) по одному из пп. 1-4, отличающееся тем, что дополнительно содержит средства позиционирования горизонтальной виртуальной плоскости (22), предназначенные для позиционирования упомянутой горизонтальной виртуальной плоскости (22) таким образом, чтобы она не пересекалась с опорной плоскостью (12).
6. Устройство (10) по п. 5, отличающееся тем, что средства позиционирования представляют собой схему обратной связи, выполненную с возможностью определения углового положения (73) горизонтальной виртуальной плоскости (22) относительно опорной плоскости (12) и передачи нового углового положения (74) в горизонтальный излучатель (14), формирующий горизонтальную виртуальную плоскость (22).
7. Устройство (10) позиционирования по п. 5, отличающееся тем, что средства позиционирования представляют собой ориентацию излучателя (14) пучка (15) таким образом, чтобы ориентировать горизонтальную виртуальную плоскость (22) для получения положительного угла (72) между горизонтальной виртуальной плоскостью (22) и опорной плоскостью (12).
8. Устройство (10) по одному из пп. 1-7, при этом аппарат (11) имеет приоритетное направление перемещения в первом направлении вдоль оси Х, отличающееся тем, что дополнительно содержит:
так называемый наклонный излучатель (32) наклонного пучка (27), проходящего в виртуальной плоскости (26), которая может пересекаться с опорной плоскостью (12) вдоль прямой, перпендикулярной к оси Х,
средство анализа изображения,
тем, что первый датчик (5) изображения выполнен с возможностью формирования изображения прямой, и тем, что средство анализа изображения выполнено с возможностью определения присутствия препятствия посредством обнаружения деформации прямой.
9. Устройство (10) по одному из пп. 1-8, отличающееся тем, что содержит средства (8) управления, выполненные с возможностью выборочной деактивации излучателей (14, 16, 19, 32, 34, 35) и датчиков (5) в зависимости от направления перемещения аппарата (11).
10. Устройство (10) по одному из пп. 1-9, отличающееся тем, что дополнительно содержит схему (9) обработки, выполненную с возможностью управления частотностью излучений пучков (15, 17, 20, 27, 30, 31) излучателями (14,16,19,32,34,35) и синхронизации излучений пучков (15, 17, 20, 27, 30, 31) с захватом изображений датчиками (5, 6, 7).
11. Устройство (10) по одному из предыдущих пунктов, отличающееся тем, что пучок или пучки (15, 17, 20, 27, 30, 31) являются лазерными пучками.
12. Аппарат (11), отличающийся тем, что содержит устройство (10) обнаружения препятствия по одному из предыдущих пунктов.
13. Способ обнаружения препятствий с применением устройства (10) по одному из пп. 1-11, отличающийся тем, что содержит следующие этапы:
излучение пучка (15, 17, 20, 27, 30, 31), формирующего виртуальную плоскость (22, 23, 24, 26, 28, 29), которая может пересекаться с препятствием,
захват и формирование изображения пересечения виртуальной плоскости (22, 23, 24, 26, 28, 29) и препятствия,
анализ изображения и определение препятствия.
14. Способ по п.13, отличающийся тем, что дополнительно содержит следующие этапы:
запоминание первого изображения пересечения виртуальной плоскости (26), образованной наклонным пучком (27), с опорной плоскостью (12),
запоминание второго изображения пересечения виртуальной плоскости (26), образованной наклонным пучком (27), с препятствием,
сравнение первого и второго изображений, чтобы определить место нахождения препятствия.
| US 5040116 A, 13.08.1991 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 1998 |
|
RU2143708C1 |
| Способ переработки серно-мышьяковокислых растворов, содержащих цветные металлы | 1987 |
|
SU1504276A1 |

