Предложенное изобретение относится к автоматическим системам уборки помещений посредством роботизированной техники.
Из уровня техники широко известны различные автоматические системы уборки помещений с использованием роботов-пылесосов.
В патенте РФ №2357644, публикация 10.06.2009, описана роботизированная система чистки, принятая за наиболее близкий аналог. Известная система содержит робот-пылесос, предназначенный для выполнения уборки при автоматическом перемещении по очищаемой поверхности, а также зарядную станцию, выполненную с возможностью соединения с роботом-пылесосом для зарядки электроэнергией аккумулятора, установленного в роботе-пылесосе. Система дополнительно обеспечивает беспрепятственное преодоление порогов роботом-пылесосом независимо от их высоты.
Роботы-пылесосы и их зарядные станции могут иметь различные варианты конструктивного выполнения, а также рабочие характеристики. При этом зарядные станции могут быть как стационарными, так и мобильными.
В патенте РФ №2350252, публикация 27.03.2009, описан способ зарядки робота-пылесоса, при котором обеспечивается возможность выявления неправильного соединения между контактными и зарядными клеммами и предотвращения неправильной установки робота-пылесоса относительно зарядного устройства при зарядке робота-пылесоса вручную.
В патенте РФ №2338639, публикация 20.11.2008, описаны система и способ возвращения робота-пылесоса к зарядному устройству. Система возвращения робота-пылесоса к зарядному устройству содержит передатчик сигналов самонаведения, приемник системы самонаведения сигналов и устройство управления. Приемник системы самонаведения сигналов установлен в роботе-пылесосе и принимает, по меньшей мере, один сигнал, переданный от передатчика сигналов самонаведения. Устройство управления предназначено для распознавания указанного одного сигнала и для управления роботом с обеспечением его возвращения к зарядному устройству. Робот-пылесос принимает инфракрасный сигнал, переданный от зарядного устройства, обнаруживает его местоположения и осуществляет стыковку с зарядным устройством с обеспечением зарядки робота-пылесоса.
В патенте РФ №2321879, публикация 10.04.2008, предложен мобильный робот-уборщик, способный распознавать изображение, и система для его наведения, содержащая зарядное устройство, на которое напечатан образ наведения стыковки.
В патенте РФ №2311868, публикация 10.12.2007, описана система автоматизированной уборки помещений. Система содержит видеокамеры и робот-мусорщик. Видеокамеры расположены в верхних углах помещения и через блок видеозахвата и первый приемопередатчик радиоканалом связаны со вторым приемопередатчиком робота-мусорщика. Робот-мусорщик содержит также приемопередающую антенну, микропроцессор, аккумуляторные батареи, электродвигатели шасси, электродвигатели захвата и сам механический захват, мусорный отсек. Видеокамеры расположены стационарно с секторами обзора в сумме перекрывающих всю поверхность контролируемого пола, а число видеокамер выбрано из условия полного обзора поверхности пола.
В патенте РФ №2303387, публикация 27.07.2007, описана автоматизированная система уборки и способ возврата робота-уборщика к внешнему зарядному устройству. Система содержит внешнее зарядное устройство, содержащее зарядную опору с зарядными клеммами, и множество передающих частей, предназначенных для посылки сигналов с различными кодами и мощностями. Робот-уборщик содержит аккумуляторную батарею, соединительные клеммы для соединения с зарядными клеммами для подачи электроэнергии в аккумуляторную батарею, приемную часть для получения сигналов от передающих частей и управляющую часть для управления перемещением робота-уборщика с использованием сигналов, принятых приемной частью.
Автоматическая система уборки помещений с роботом-уборщиком и зарядной станцией известна также из опубликованной заявки US 2009/0049640, публикация 26.02.2009. Зарядная станция дополнительно обеспечивает выгрузку мусора из робота-уборщика в отдельный контейнер.
Также автоматические системы уборки помещений известны из опубликованной заявки ЕР 1842474, 10.10.2007, опубликованной заявки GB 2414167, 23.11.2005, патента US 7332890, 19.02.2008, патента US 7555363, 30.06.2009, опубликованной заявки JP 2007-181656, 19.07.2007.
В качестве наиболее близкого аналога для предложенной системы рассмотрена система по патенту РФ №2357644.
Общими признаками известной и предложенной системы роботизированной уборки помещения являются наличие робота-пылесоса, зарядной станции и системы управления.
Все известные системы автоматической уборки помещений с роботами-пылесосами имеют существенный недостаток, заключающийся в необходимости выделения дополнительного места в помещении, а также открытого размещения зарядной станции и робота-пылесоса.
Задачей предложенного изобретения является создание системы автоматической уборки помещения с парковочным модулем, обеспечивающим экономию внутреннего пространства помещения, интеграцию с дизайном помещения, а также исключение нежелательного несанкционированного контакта детей и домашних животных со сложной дорогостоящей роботизированной техникой.
Для решения поставленной задачи предложена автоматическая система уборки помещения с парковочным модулем для робота-пылесоса, содержащая робот-пылесос, зарядную станцию, а также парковочный модуль для робота-пылесоса, объединенные единой системой управления, обеспечивающей синхронизацию работы основных элементов. Отличием предложенной системы является то, что парковочный модуль содержит корпус, обеспечивающий закрытое размещение в нем робота-пылесоса и зарядной станции, и фронтальную крышку с управляемым приводным механизмом, обеспечивающим открытие/закрытие указанной фронтальной крышки по команде от системы управления.
Парковочный модуль позволяет интегрировать его в цокольную часть мебели, сохраняя дизайн помещения, что обеспечивается размерами и используемыми материалами парковочного модуля.
Управление роботом-пылесосом и приводным механизмом (например, электромеханическим приводом) фронтальной крышки парковочного модуля обеспечивается посредством единой системы управления, что повышает удобство эксплуатации предложенной системы.
Система управления состоит из нескольких элементов и объединяет в единую цепь все элементы предложенной автоматической системы уборки помещения с парковочным модулем. Создание и программирование такой системы управления на основе известных средств и методов не составляет труда.
Робот-пылесос и приводной механизм фронтальной крышки парковочного модуля выполнены с возможностью совместного и/или раздельного способа подачи рабочих команд от системы управления, при этом система управления обеспечивает раздельное и/или совместное управление роботом-пылесосом и приводным механизмом.
Приводной механизм питается от контроллера и имеет возможность управления по радиочастотному и/или гальваническому каналу связи.
Система управления содержит программируемый модуль, обеспечивающий хранение и обработку команд управления, а также синхронизированное управление роботом-пылесосом, зарядной станцией и приводным механизмом фронтальной крышки, для этого указанные элементы, как правило, имеют соответствующие контроллеры, датчики и приемопередатчики. В любом случае система управления содержит модули подачи сигналов команд управления роботу-пылесосу, зарядной станции и контроллеру электромеханического привода фронтальной крышки парковочного модуля, а указанные устройства содержат элементы, обеспечивающие выполнение команд от системы управления.
Система управления содержит, по меньшей мере, один радиочастотный дистанционный пульт управления с обеспечением приема и передачи команд на рабочие элементы предложенной автоматической системы уборки помещений.
Предпочтительно, чтобы система управления была выполнена на базе зарядной станции и/или на базе робота-пылесоса, также система управления может быть выполнена отдельным блоком.
Дополнительно предложенная система может содержать звуковой и/или светодиодный модуль сигнализации о выполнении рабочих команд и/или заданных режимов работы.
Преимущества и варианты выполнения предложенной системы более подробно описаны ниже, однако не ограничиваются описанием и должны быть рассмотрены с привлечением известного уровня техники.
Предложенное техническое решение предназначено для инсталляции парковочного места для бытовых автоматических систем уборки - роботов-пылесосов, обладающих возможностью радиочастотного управления, главным образом в цокольные ниши стандартного размера практически любого мебельного гарнитура, предпочтительно кухонного.
Предложенный автоматический парковочный модуль представляет собой электронно-механический бокс, встраиваемый в стандартные цокольные ниши мебельного гарнитура или иное специально отведенное место, обеспечивающий уникальное эргономичное размещение и функционирование робота-пылесоса в бытовых условиях, с сохранением дизайна помещения, что является важным фактором для потребителя.
Робот-пылесос с зарядной станцией может быть продукцией любого известного производителя данной техники и не является самостоятельным предметом настоящего изобретения.
Устройство парковочного модуля содержит следующие основные модули и блоки:
- Корпус, выполненный, например, из ламинированного ДСП, пластика или дерева, с фронтальной откидной крышкой, предпочтительно с вертикальным способом открывания, выполненной, например, из алюминия или пластика. Стандартные внешние размеры корпуса составляют, как правило, 600×540×120 мм либо 600×540×150 мм.
- Приводной механизм фронтальной откидной крышки, например, электрический линейный актуатор (электромеханический привод).
- Контроллер управления приводным механизмом крышки; при этом способ передачи команд управления может быть радиочастотный или гальванический (проводной), а также любой другой возможный.
- Зарядную базу робота-пылесоса (может быть штатной из комплекта робота-пылесоса или дополнительной).
- Сетевой источник питания - штатный из комплекта робота-пылесоса или дополнительный.
- Систему управления зарядной станцией, роботом-пылесосом и приводным механизмом фронтальной крышки парковочного модуля.
- Радиочастотный брелок для автономного управления контроллером парковочного модуля (как правило, с дополнительным автономным радиочастотным каналом).
- Радиочастотный пульт дистанционного управления роботом - может быть штатный.
Сетевой адаптер представляет собой штатный импульсный блок питания робота-пылесоса. Напольная зарядная база представляет собой штатное устройство для навигации и автоматической зарядки робота-пылесоса. Канал связи - радиочастотный, способ навигации - инфракрасный. Способ контакта зарядной станции с роботом-пылесосом при парковке - гальванический. Питание системы может осуществляться от штатного сетевого адаптера.
Радиочастотный пульт управления представляет собой, как правило, штатное устройство для активации и управления роботом-пылесосом и программирования индивидуального еженедельного графика уборки.
Контроллер управления приводным механизмом фронтальной крышки парковочного модуля представляет собой, например, доработанный стандартный блок автосигнализации, с силовым выходом управления электрическими замками и наличием функции программирования длительности управляющего импульса на замки.
Электромеханический привод для открывания/закрывания фронтальной крышки может быть выполнен на основе известных из уровня техники средств и не представляет сложности. В частности, принцип действия линейного электромеханического привода аналогичен автоматическим гаражным воротам, управляемым с пульта дистанционного управления.
Контроллер привода может быть снабжен вторичным источником питания и/или подключаться непосредственно к штатному источнику питания робота-пылесоса.
Радиочастотные брелоки представляют собой дополнительный автономный канал управления контроллером привода и необходимы для принудительного дистанционного управления открыванием/закрыванием фронтальной крышки. Когда робот-пылесос находится на зарядной базе (фронтальная крышка закрыта) команды от дополнительных брелоков блокируются. Это обеспечивает защиту от возможного сбоя электромеханической синхронизации. Электромагнитная совместимость радиочастотных брелоков соответствует ГОСТ Р 50789-95 и ГоСТ Р 41.97.
Радиочастотный автономный канал управления контроллером привода используется в следующих ситуациях:
А) для первичной синхронизации работы парковочного модуля и робота при инсталляции комплекса и подключении его к сети;
Б) при необходимости - для открывания и закрывания передней створки модуля при возникновении нештатных ситуаций (аккумуляторная батарея робота разряжена, либо когда робот потерял гальваническую связь с напольной зарядной базой и он находится внутри, когда робот находится вне паркинга.
Гальванический канал используется всегда при успешной парковке робота на зарядную базу и фактически является каналом передачи по кабелю команды открывания/закрывания передней створки модуля. Например, наличие потенциала +12В на выходе зарядной базы - признак «присутствия» робота в парковочном модуле, что является командой закрывания; 0B - признак «отсутствия» робота на зарядной базе, что является командой открывания.
Для управления роботом-пылесосом существуют три возможных способа:
A) ручной способ активации режима парковки - нажатием на соответствующую кнопку панели управления (когда робот находится вне парковочного модуля);
Б) активация режима парковки и выхода с помощью радиочастотного пульта управления;
B) активация режима парковки автоматически при разряде аккумуляторной батареи в процессе уборки с обязательным использованием штатных координаторов движения для осуществления точной навигации робота при поиске зарядной базы, например, в условиях уборки нескольких помещений;
Г) активация режима уборки по сигналу встроенного таймера согласно заранее заданному пользователем индивидуальному графику уборки.
Работает предложенная система следующим образом.
Корпус парковочного модуля размещается в заранее подготовленной цокольной нише, например кухонного гарнитура, с соответствующими размерами полезного объема. Как пример, для этого необходимо вырезать в мебельном цоколе проем с тем, чтобы обеспечить зазоры слева и справа, необходимые для свободного открывания фронтальной крышки парковочного модуля и установки пластиковых заглушек на торцевые срезы материала.
Сетевой адаптер подключается через гнездо задней стенки парковочного модуля и размещается в цокольном пространстве мебели. Наличие и свечение сигнального светодиода на фронтальной крышке может служить индикатором наличия питания и исправности сетевого адаптера.
С помощью радиочастотного пульта или дополнительного брелока приводят фронтальную крышку в открытое положение для обеспечения навигации и парковки робота на зарядную базу, размещенную во внутреннем объеме парковочного модуля.
Следует иметь в виду, что для точной навигации и парковки робота целесообразно использовать инфракрасный канал (ИК) связи как наиболее точный и помехоустойчивый. Поскольку ИК сигнал эффективно работает только в зоне прямой видимости, то желательно обеспечить свободное пространство в радиусе 1 м перед парковочным модулем, необходимое для маневра робота при парковке.
Для успешной парковки робота из соседнего с базой помещения необходимо применять штатные средства навигации робота пылесоса, заранее размещенные в помещениях согласно рекомендациям производителя.
Для активации пылесоса дистанционным способом предварительно осуществляют синхронизацию робота-пылесоса, зарядной станции, парковочного модуля и системы управления.
Подать команду парковки можно с помощью штатного пульта либо непосредственно с клавиатуры робота-пылесоса.
В процессе работы робот-пылесос принимает и обрабатывает сигналы координаторов движения (если они имеются и активированы) и напольной зарядной базы, оптическим способом корректирует свою траекторию движения для точной стыковки с парковочным модулем. Успешная парковка робота на зарядную станцию может подтверждаться светозвуковой сигнализацией.
Через несколько секунд после гальванического контакта робота с зарядной базой фронтальная крышка парковочного модуля автоматически плавно закрывается, обеспечивая скрытое эргономичное размещение и постоянный контролируемый заряд робота-пылесоса.
Очередной выход робота-пылесоса из парковочного модуля активируется либо по команде встроенного таймера согласно заранее запрограммированному графику уборки, либо по команде с радиочастотного пульта управления.
Выезд робота-пылесоса из парковочного модуля упреждается синхронным открыванием фронтальной створки и может сопровождаться звуковым и световым сигналом, например мелодией.
По окончании цикла уборки одного или нескольких помещений либо при нормативном разряде встроенного аккумулятора робот-пылесос автоматически возвращается в парковочный модуль на зарядную базу без человеческого участия для подзарядки и занимает свое место на зарядной станции, автоматически закрыв за собой «дверку», что предотвращает несанкционированный контакт с техникой.
Для владельца подобной автоматизированной системы уборки дома уход за роботом сводится к очистке контейнера-пылесборника и щеток от волос и мусора. При этом очистка контейнера-пылесборника также может быть выполнена автоматической, в этом случае пользователю останется только осуществлять регулярное сервисное обслуживание системы.
В результате дети и домашние животные не имеют доступа к роботу-пылесосу в момент зарядки. Робот-пылесос убирает всю видимую зону квартиры, так как отсутствует мертвая зона, существующая вокруг зарядного устройства. Робот-пылесос не занимает места в видимой зоне (что важно для небольших квартир) и не нарушает стилевого решения интерьера.
Процедура синхронизации между роботом-пылесосом и парковочным модулем представляет собой несколько простых операций и производится при инсталляции парковочного модуля, например, в составе мебельного гарнитура. Необходимость повторной процедуры может потребоваться в процессе эксплуатации комплекса при возникновении внештатных ситуаций, связанных либо с отключением электроэнергии, либо выходом из строя робота-пылесоса, заменой элементов питания пульта дистанционного управления. Синхронизация может быть автоматической (запрограммированной) либо полуавтоматической (с набором пользователем необходимых команд).
Пример последовательности выполнения операций синхронизации:
1. Перед инсталляцией парковочного модуля необходимо обеспечить зарядку и электропитание необходимых элементов системы, а также взаимодействие штатных устройств робота-пылесоса.
2. Поместить парковочный модуль в заранее подготовленную цокольную нишу мебельного гарнитура, подключить адаптер к сети, убедившись в свечении контрольного светодиода адаптера.
3. С помощью радио-брелока или дистанционно привести фронтальную крышку модуля в открытое состояние для обеспечения беспрепятственной парковки робота на штатную зарядную базу, размещенную внутри корпуса.
4. Робот-пылесос разместить на расстоянии перед открытым парковочным модулем, обеспечив необходимое пространство для маневра. Активировать робот-пылесос, затем подать команду парковки с пульта дистанционного управления, либо вручную.
5. После успешной парковки робота на зарядную станцию прозвучит тональная мелодия и фронтальная крышка плавно закроется. Яркое свечение диода фронтальной крышки является индикатором исправности питания модуля и наличием робота на зарядной станции внутри парковочного модуля.
На этом процедура синхронизации считается успешно выполненной. Для выхода робота-пылесоса на уборку в удобное для пользователя время при желании можно запрограммировать индивидуальный еженедельный график уборки.
Предложенная система автоматической уборки помещения с парковочным модулем для робота-пылесоса, несомненно, выгодно отличает ее от существующих в мире аналогов.
На чертеже приведена логическая схема работы системы.
Перечень основных элементов парковочного модуля: корпус; электромеханический привод передней створки; контроллер электромеханического привода с двумя каналами передачи команд управления - радиочастотный и гальванический канал; напольная зарядная база; соединительные кабели; светодиоды индикации состояния; радиочастотные брелоки; радиочастотный пульт дистанционного управления; сетевое зарядное устройство.
Предложенный вариант организации привода передней створки парковочного модуля с помощью электрического линейного актуатора отличается простотой, надежностью и точностью выполнения команд. К его недостаткам можно отнести относительно высокую стоимость привода и ощутимый уровень шума при работе двигателя.
Могут быть рассмотрены следующие альтернативные примеры способов открывания передней створки парковочного модуля:
1. Использование в качестве исполнительного механизма пневматического поршневого привода.
Этот способ выгодно отличается по шумности работы механики, но вакуумный насос при работе также создает сопоставимый с электромеханическим приводом уровень шума, что нивелирует его преимущества. Кроме того, точность выполнения операций уступает электрическому линейному актуатору, а стоимость пневматики сопоставима с используемым приводом.
2. Вариант конструкции с использованием шагового электрического двигателя с тросиковым приводом и применением роликовых механизмов. Конструктивно он менее надежен, чем электрический линейный актуатор, что не позволяет отдать ему предпочтение. Единственным преимуществом является относительно низкая стоимость.
3. Вариант конструкции с использованием газового пружинного мебельного амортизатора совместно с электрическим соленоидом (например, от автосигнализации), который выполняет функцию электрозамка. Плавное механическое открывание производит пружинный механизм амортизатора.
Такое техническое решение отличается относительно низкой стоимостью, но позволяет осуществить только одну автоматическую операцию - плавное открывание передней крышки модуля, закрывание в этом варианте производится вручную, что не отвечает в полном объеме поставленной задаче.
Таким образом, выбранный разработчиком вариант технического решения привода фронтальной крышки с использованием электрического линейного актуатора, является оптимальным, и он в полном объеме и с высокой надежностью выполнения операций отвечает поставленной задаче.
Использование указанного парковочного модуля и его конструктивное выполнение обеспечивают улучшение эргономики автоматической системы уборки помещений, экономию внутреннего пространства помещения с сохранением его дизайна, а также исключение нежелательного контакта детей и домашних животных со сложной дорогостоящей роботизированной техникой.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| СИСТЕМА С ПОДВИЖНЫМ РОБОТОМ И СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТАКИМ РОБОТОМ | 2006 |
|
RU2320020C1 |
| МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА С НЕСКОЛЬКИМИ СМЕННЫМИ РАБОЧИМИ МОДУЛЯМИ И СПОСОБ УПРАВЛЕНИЯ ЭТОЙ СИСТЕМОЙ | 2006 |
|
RU2313442C1 |
| Робот-уборщик и способ очистки | 2019 |
|
RU2775535C1 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833538C2 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833996C2 |
| САМОДВИЖУЩИЙСЯ КОМПЛЕКС ПОЖАРОТУШЕНИЯ НА БАЗЕ САМОХОДНОГО РОБОТА | 2020 |
|
RU2755461C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС | 2013 |
|
RU2538473C2 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2019 |
|
RU2777408C1 |
Предложенное изобретение относится к автоматическим системам уборки помещений с парковочным модулем. Предложена автоматическая система уборки помещения, содержащая робот-пылесос, зарядную станцию, систему управления, а также парковочный модуль для робота-пылесоса. Парковочный модуль содержит корпус, обеспечивающий размещение в нем робота-пылесоса и зарядной станции, фронтальную крышку с управляемым приводным механизмом, обеспечивающим открытие и закрытие указанной фронтальной крышки по команде от системы управления. Наличие указанного парковочного модуля и его конструктивное выполнение обеспечивают улучшение эргономики автоматической системы уборки помещений, экономию внутреннего пространства помещения с сохранением дизайна помещения, а также исключение нежелательного контакта детей и домашних животных со сложной дорогостоящей роботизированной техникой. 9 з.п. ф-лы, 1 ил.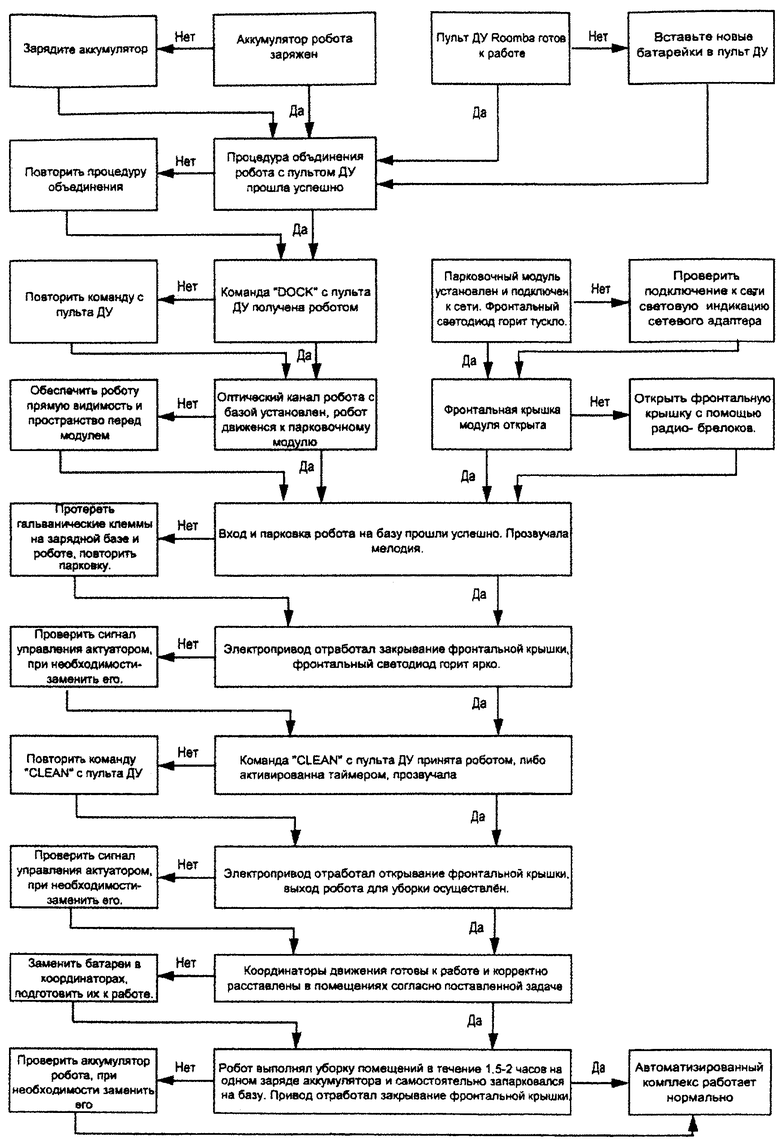
1. Автоматическая система уборки помещения, содержащая робот-пылесос, зарядную станцию, систему управления, а также парковочный модуль для робота-пылесоса, отличающаяся тем, что парковочный модуль содержит корпус, обеспечивающий размещение в нем робота-пылесоса и зарядной станции, фронтальную крышку с управляемым приводным механизмом, обеспечивающим открытие/закрытие указанной фронтальной крышки по команде от системы управления, поступающей на контроллер приводного механизма.
2. Система по п.1, отличающаяся тем, что конструкция парковочного модуля обеспечивает возможность его установки в цокольной части мебели.
3. Система по п.1, отличающаяся тем, что управление роботом-пылесосом, зарядной станцией и приводным механизмом фронтальной крышки парковочного модуля обеспечивается посредством единой системы управления.
4. Система по п.1, отличающаяся тем, что приводной механизм фронтальной крышки парковочного модуля выполнен с возможностью управления по радиочастотному и/или гальваническому каналу связи.
5. Система по п.1, отличающаяся тем, что система управления содержит программируемый модуль, обеспечивающий хранение и обработку команд управления.
6. Система по п.1, отличающаяся тем, что система управления содержит модули приема и передачи сигналов команд управления роботу-пылесосу, зарядной станции и контроллеру приводного механизма фронтальной крышки парковочного модуля.
7. Система по п.1, отличающаяся тем, что система управления содержит, по меньшей мере, один радиочастотный дистанционный пульт управления.
8. Система по п.1, отличающаяся тем, что система управления выполнена на базе зарядной станции и/или на базе робота-пылесоса.
9. Система по п.1, отличающаяся тем, что дополнительно содержит звуковой и/или светодиодный модуль сигнализации о выполнении рабочих команд и/или заданных режимов работы системы.
10. Система по п.1, отличающаяся тем, что приводной механизм выполнен в виде линейного электромеханического привода.
| WO 2004004534 A1, 15.01.2004 | |||
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ (ВАРИАНТЫ) | 2007 |
|
RU2357644C2 |
| WO 9928800 A1, 10.06.1999 | |||
| US 20090044370 A1, 19.02.2009. | |||

