Изобретение относится к комбинации рельсовых транспортных средств, содержащей первую мотор-вагонную единицу и, по меньшей мере, одну вторую мотор-вагонную единицу, которые содержат соответственно приводное устройство и тормозное устройство, причем тормозные устройства, по меньшей мере, двух мотор-вагонных единиц содержат соответственно несколько тормозных узлов.
В современных системах железнодорожного сообщения все чаще используют мотор-вагонные единицы, которые по мере необходимой производственной мощности на определенных участках могут быть соединены между собой для формирования комбинации рельсовых средств и вновь рассоединены для автономной эксплуатации по отдельности. В процессе торможения в соединенном состоянии активацию тормозных устройств отдельных мотор-вагонных единиц производят одновременно.
Задача изобретения заключается в достижении гибкого использования мощностей тормозных устройств соединенных мотор-вагонных единиц при такой комбинации рельсовых транспортных средств.
Для этого предлагается, что в сопряженном состоянии комбинация рельсовых транспортных средств образована вышестоящая по отношению к тормозным устройствам, соединенная с ними система управления тормозным действием, которая предусмотрена для распределения тормозного действия на тормозные устройства, по меньшей мере, двух мотор-вагонных единиц. За счет этого в отношении распределения тормозного действия может быть достигнута особо высокая гибкость при использовании тормозных устройств сопряженных мотор-вагонных единиц.
Вышестоящая система управления тормозным действием содержит в целесообразном случае, по меньшей мере, один блок управления, который работает с использованием, по меньшей мере, одного алгоритма распределения. По сравнению с устройством управления тормозного устройства в мотор-вагонной единице, причем это управляющее устройство предусмотрено для управления тормозными устройствами этой мотор-вагонной единицы, это устройство управления играет вышестоящую роль. Например, блок управления системы управления тормозным действием может быть придан одному уровню иерархии управления, который является вышестоящим по сравнению с уровнями отдельных мотор-вагонных единиц. Блок управления системы управления тормозным действием предусмотрен, в частности, для координации эксплуатации управляющих устройств. Для этого блок управления находится в активном соединении в отношении передачи данных и/или техники управления с устройствами управления отдельных мотор-вагонных единиц. Кроме того, функция блока управления системы управления тормозным действием может быть заимствована, по меньшей мере, у одного из устройств управления, которое располагает соответствующим алгоритмом распределения.
Распределение тормозного действия по тормозным устройствам можно осуществлять, в частности, на базе данных, которые передают от тормозных устройств на систему управления тормозным действием. В целесообразном случае система управления тормозным действием оснащена интерфейсом, который принимает эти данные, причем для оценки этих данных предусмотрен модуль оценки алгоритма распределения. Эти данные могут содержать, например, информацию о наличии в распоряжении и/или максимально прикладываемой тормозной силы.
Под определением «мотор-вагонная единица» следует понимать выполненное в качестве моторного вагона рельсовое транспортное средство или компоновку рельсовых транспортных средств, которые пригодны для работы в автономном режиме относительно техники привода. С этой целью приводные устройства мотор-вагонных единиц целесообразным образом соответственно пригодны для автономной эксплуатации мотор-вагонных единиц после разъединения комбинации рельсовых транспортных средств. В частности, группирование образует неразъемную в эксплуатационном отношении единицу.
Под определением распределения «тормозного действия» можно понимать распределение тормозной силы, тормозной мощности, крутящего момента или иных характеристических величин, которое является представительной для тормозного действия. Процесс распределения целесообразным образом соответствует норме выдачи частичного тормозного действия общего тормозного действия системой управления тормозным действием на тормозные устройства мотор-вагонных единиц. Устройство управления тормозного устройства соответствующей мотор-вагонной единицы, к которой относится тормозное устройство, на которое передают частичное тормозное действие, управляет этим тормозным устройством для приложения этого частичного тормозного действия.
Под определением «соединенное состояние» комбинации рельсовых транспортных средств следует понимать эксплуатационное состояние, при котором возможна ее эксплуатация в качестве взаимосвязанной единицы поезда. Это может быть осуществлено за счет того, что комбинация рельсовых транспортных средств в соединенном состоянии подлежит на языке специалистов «автоматическому соединению».
В каждой мотор-вагонной единице соответствующее тормозное устройство содержит, по меньшей мере, одну тормозную систему, которая выполнена в качестве механической тормозной системы или электродинамической тормозной системы. В особо предпочтительном исполнении изобретения тормозное устройство оснащено одной механической и одной электродинамической тормозными системами. Электродинамическая тормозная система образована известным образом, по меньшей мере, частично, компонентами приводного устройства, в частности, приводных электродвигателей.
Один тормозной блок тормозного устройства может представлять собой комплектную тормозную систему тормозного устройства или подсистему этой тормозной системы. Если мотор-вагонные единицы выполнены соответственно в качестве группированных единиц транспортных средств, тормозной блок может быть определен, кроме того, в качестве структуры, которая придана одной единице транспортного средства группы. При этом особо эффективное распределение тормозной силы может быть достигнуто в случае, если единицам транспортных средств группы соответственно придан, по меньшей мере, один отличающийся тормозной блок соответствующего тормозного устройства. Если тормозное устройство оснащено различными тормозными системами и одна единица транспортного средства группы оснащена компонентами различных тормозных систем различных техник, то приданный этой единице транспортного средства тормозной блок может быть определен как логичное техническое сопряжение этих компонентов. В соответствии с этим тормозной блок может способствовать механическому и/или электродинамическому торможению.
В особо предпочтительном исполнении изобретения предлагается, что система управления тормозным действием предусмотрена для осуществления распределения тормозного действия для тормозного устройства второй мотор-вагонной единицы в зависимости от, по меньшей мере, одного параметра торможения тормозного устройства первой мотор-вагонной единицы. За счет этого может быть достигнуто оптимальное распределение тормозного действия, согласованное с особенностями первой мотор-вагонной единицы. Параметр торможения тормозного устройства может представлять собой наличие в распоряжении тормозного устройства, наличие в распоряжении, по меньшей мере, одного тормозного блока тормозного устройства, тормозное действие, оказываемое, по меньшей мере, одним тормозным блоком и т.д.
Предпочтительным является то, что система управления тормозным действием содержит соединенный с тормозными устройствами мотор-вагонных единиц информационный интерфейс, с помощью которого могут быть приняты параметры торможения от нескольких, в частности, всех тормозных блоков первой и второй мотор-вагонных единиц, и которое использует алгоритм распределения, который предусмотрен для назначения тормозного действия на базе параметров торможения, по меньшей мере, этим блокам торможения.
В качестве параметра торможения тормозного блока в целесообразном случае рассматривают, по меньшей мере, реализуемое тормозным блоком тормозное действие и подлежащую торможению массу. Это реализуемое тормозное действие является, в частности, тормозным действием, которое может быть реализовано соответствующим блоком торможения в соответственно актуальный момент эксплуатации. Особо предпочтительно оно может учитывать заранее заданные характеристики и/или актуальные условия эксплуатации, такие как, например, термические нагрузки. Эксплуатационные параметры отдельных блоков торможения предпочтительно накапливают через информационный интерфейс в системе управления тормозным действием и оценивают их с помощью его блока управления, выполняющего алгоритм распределения. В основу алгоритма распределения предпочтительно положен метод оптимизации. В соответствии с одним исполнением алгоритм распределения может быть предусмотрен для оптимизации параметрических значений износа. При этом частичные тормозные действия могут быть назначены с высоким приоритетом для электродинамических тормозных блоков, причем частичные тормозные действия назначают для механических тормозных блоков таким образом, что возникает максимально возможное равномерное нагружение механических тормозных блоков.
Кроме того, для оснащенных приспособлением противоскольжения тормозных блоков - в качестве параметра торможения этих тормозных блоков может быть соответственно использовано эксплуатационное состояние устройства противоскольжения. Это предпочтительно, в частности, при исполнении алгоритма распределения, в основу которого положена оптимизация использования коэффициента скольжения. При этом могут быть рассчитаны подлежащие назначению частичные тормозные действия для минимизации использованного коэффициента сцепления, причем тормозные блоки нагружают предпочтительно до определяемой границы коэффициента сцепления. В простейшем случае эксплуатационное состояние может характеризовать посредством извещений «активный» или «неактивный».
В этой взаимосвязи предлагается, что алгоритм распределения предусмотрен для того, чтобы при неактивных устройствах противоскольжения в мотор-вагонных единицах производить учет первой границы коэффициента сцепления для расчета подлежащих назначению частичных тормозных действий и при, по меньшей мере, одном активном устройстве противоскольжения производить учет второй границы коэффициента сцепления для расчета подлежащих назначению частичных тормозных действий, которые меньше первой границы коэффициента сцепления.
В особо предпочтительном исполнении изобретения предлагается, что система управления тормозным действием предусмотрена для того, чтобы при ошибочной эксплуатации тормозного устройства первой мотор-вагонной единицы назначить, по меньшей мере, одну часть компенсирующего тормозного действия, по меньшей мере, для одного тормозного блока второй мотор-вагонной единицы. За счет этого обеспечивают поддержание подлежащий исполнению с помощью неисправного тормозного устройства процесса торможения с помощью, по меньшей мере, одного тормозного блока второй мотор-вагонной единицы. При распределении подлежащего компенсации тормозного действия по тормозным блокам первой мотор-вагонной единицы и тормозным блокам второй мотор-вагонной единицы может быть достигнута щадящая тормозные устройства компенсация ошибочного тормозного действия.
Под подлежащим компенсации тормозным действием следует понимать тормозное действие, которое потеряно относительно безупречного режима вследствие ошибочной эксплуатации.
Кроме того, компенсация тормозного действия может быть достигнута особо щадяще и с помощью простого алгоритма распределения, если система управления тормозным действием предусмотрена для того, чтобы при полном отказе одного тормозного блока тормозного устройства первой мотор-вагонной единицы осуществлять равномерное распределение подлежащего компенсации тормозного действия по остальным тормозным блокам мотор-вагонных секций. Вышедший из строя тормозной блок в основном не нуждается в специальном обслуживании системой управления тормозным действием, так как этот случай может быть маркирован извещением о прилагаемом тормозном действии, которое равно нулю.
В предпочтительном усовершенствовании изобретения предлагается, что тормозные устройства, по меньшей мере, двух мотор-вагонных единиц содержат соответственно устройство управления, по меньшей мере, две мотор-вагонных единицы содержат техническую систему управления, причем технические системы управления в соединенном состоянии комбинации рельсовых транспортных средств соединены между собой, а система управления тормозным действием образована, по меньшей мере, устройствами управления, которые соединены друг с другом с помощью технических систем управления. За счет этого можно отказаться от встраивания узла, специально предусмотренного для функции системы управления тормозным действием, отдельного от устройств управления. При этом возможно предпочтительное использование существующего объединения в сеть устройств управления с приданными тормозными блоками соответствующей мотор-вагонной единицы, а также существующих технических систем управления. Это можно особо просто осуществить, если программирование, по меньшей мере, одного из устройств управления произведено с алгоритмом распределения. Далее может быть достигнуто предпочтительное резервирование при отказе одного из устройств управления.
Изобретение также относится к способу торможения комбинации рельсовых транспортных средств, который включает в себя одну первую мотор-вагонную единицу и, по меньшей мере, одну вторую мотор-вагонную единицу, которые содержат соответственно приводное устройство и тормозное устройство, причем тормозные устройства, по меньшей мере, двух мотор-вагонных единиц содержат соответственно несколько тормозных блоков.
Предлагается, что
- в соединенном состоянии комбинации рельсовых транспортных средств образуют вышестоящую по отношению к тормозным устройствам, соединенную с ними систему управления тормозным действием,
- с помощью системы управления тормозным действием тормозное действие распределяют по тормозным блокам, по меньшей мере, двух мотор-вагонных секций и
- выполняют процесс торможения в соответствии с распределением тормозного действия.
В отношении предпочтительных эффектов предложенного способа дается ссылка на указанные выше исполнения относительно состава рельсовых транспортных средств.
Примеры исполнения изобретения поясняются чертежами, на которых представлено следующее:
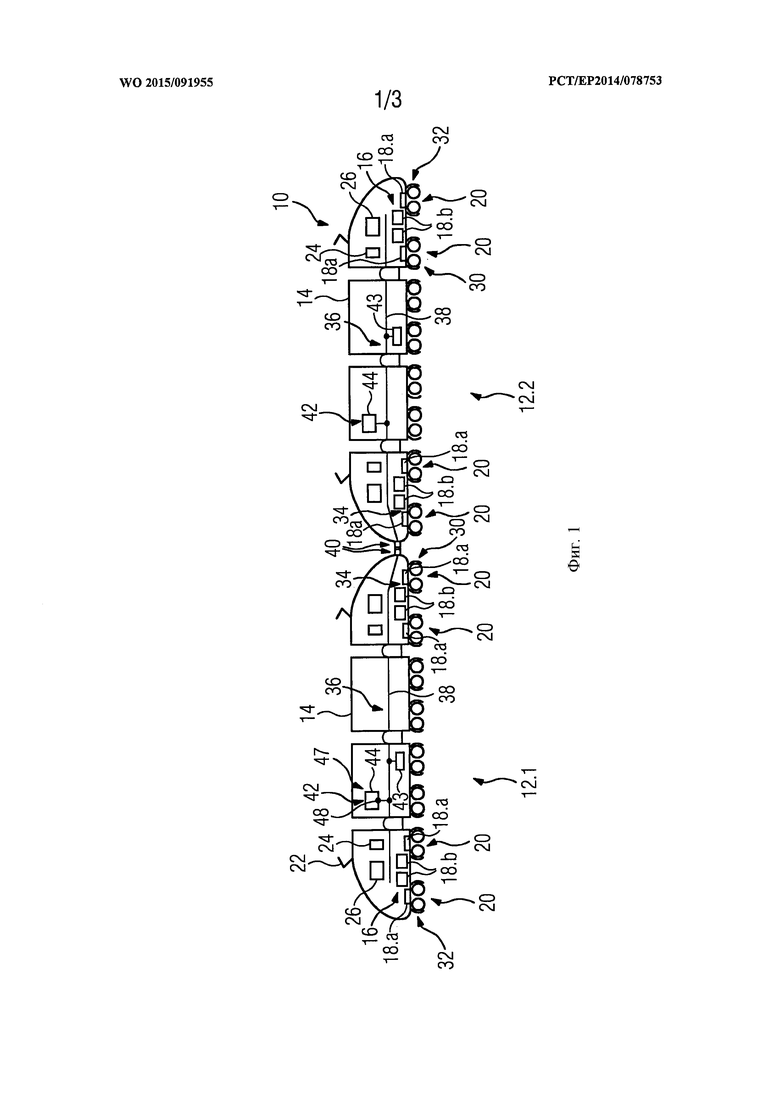
фиг. 1 - схематичный вид сбоку комбинации рельсовых транспортных средств с двумя мотор-вагонными единицами;
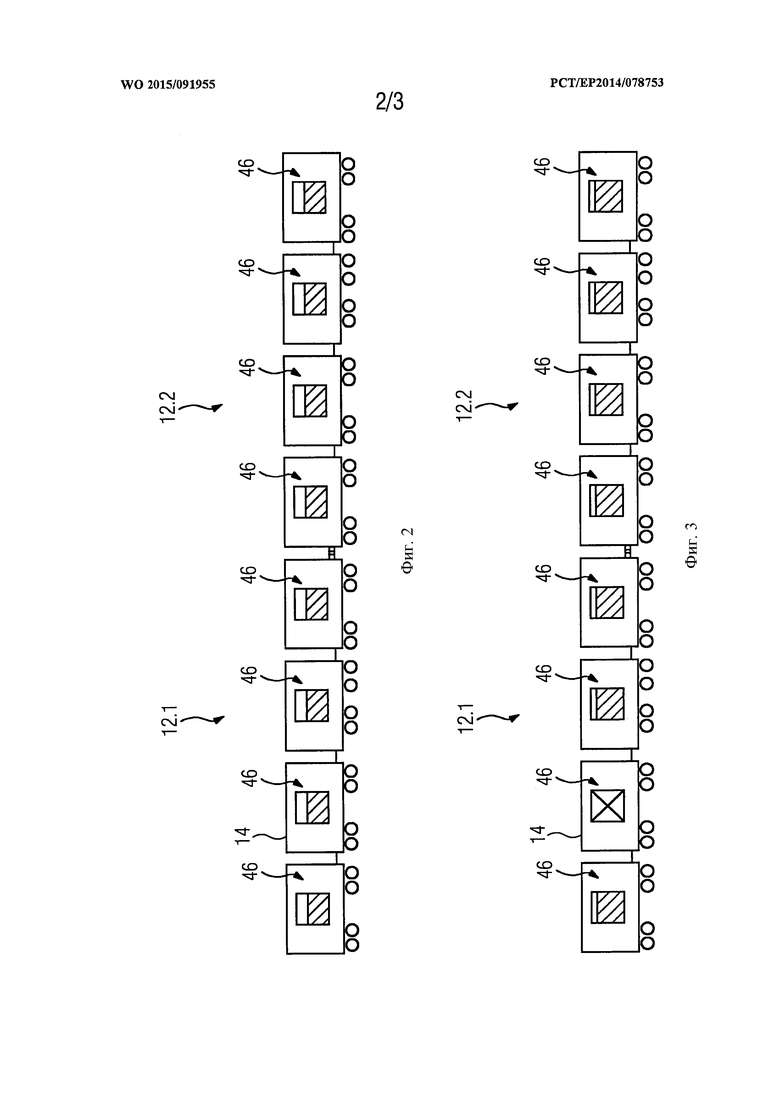
фиг. 2 - осуществляемое на тормозных блоках состава распределение тормозного действия в нормальном режиме;
фиг. 3 - осуществляемое на тормозных блоках состава распределение тормозного действия в ошибочном режиме;
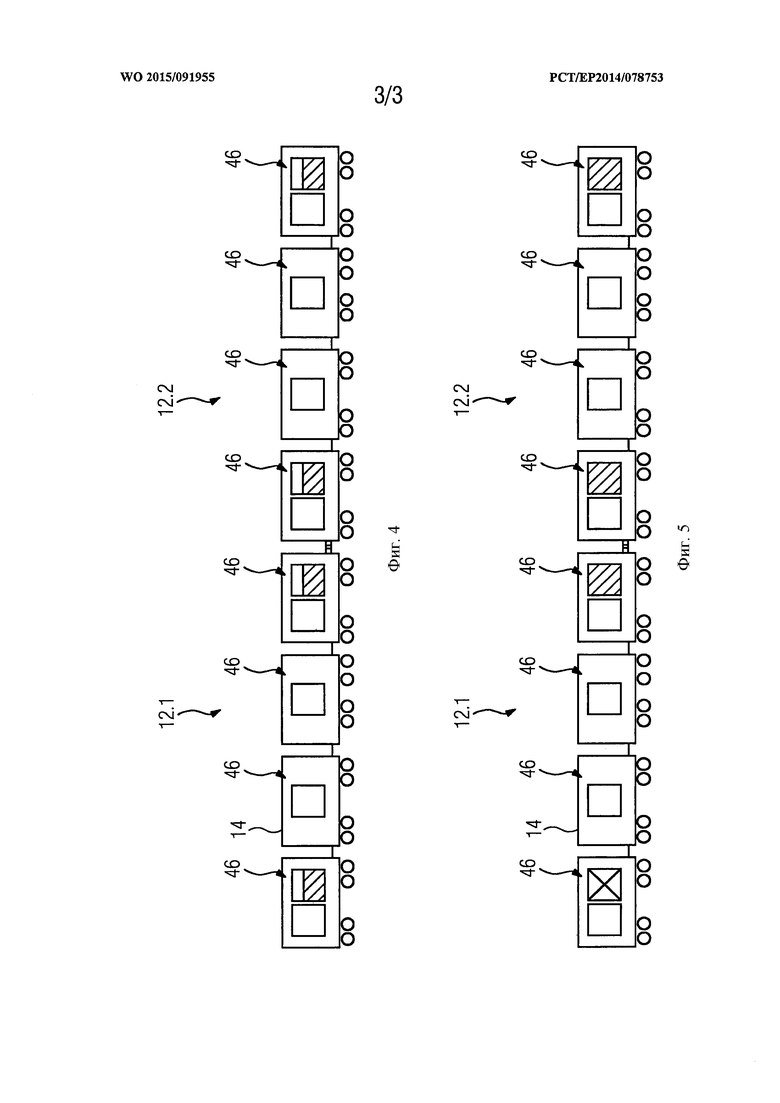
фиг. 4 - альтернативное, осуществляемое на тормозных блоках состава распределение тормозного действия в нормальном режиме;
фиг. 5 - альтернативное, осуществляемое на тормозных блоках состава распределение тормозного действия в ошибочном режиме.
Фиг.1 показывает в схематическом виде сбоку комбинацию 10 рельсовых средств. В рассматриваемом исполнении комбинация 10 рельсовых транспортных средств выполнена в качестве группы из двух мотор-вагонных единиц 12.1 и 12.2. Также представляются возможными другие исполнения с более чем двумя мотор-вагонными единицами.
В частности, каждая мотор-вагонная единица 12 выполнена для транспортировки пассажиров. Каждая мотор-вагонная единица 12 содержит несколько соединенных между собой, выполненных в качестве вагонов единиц 14 транспортных средств, которые соответственно оснащены пассажирским салоном. Кроме того, каждая мотор-вагонная единица 12 выполнена применительно к технике привода в качестве автономного моторного вагона. За счет этого мотор-вагонные единицы 12.1, 12.2 могут быть отдельными друг от друга и эксплуатироваться отдельно друг от друга. Соединение или разъединение мотор-вагонных единиц 12.1, 12.2 для формирования или разъединения комбинации 10 рельсовых транспортных средств производят в зависимости от потребной вместительности для транспортировки пассажиров.
Каждая мотор-вагонная единица 12 содержит, по меньшей мере, одно приводное устройство 16, которое обеспечивает возможность автономного привода соответствующей мотор-вагонной единицы 12. При этом приводное устройство 16 первой мотор-вагонной единицы 12.1, по меньшей мере, при разъединенном состоянии комбинации 10 рельсовых транспортных средств является независимым от приводного устройства 16 второй мотор-вагонной единицы 12.2 и наоборот. В рассмотренном исполнении приводное устройство 16 мотор-вагонных единиц 12.1, 12.2 содержит приводные компоненты 18.а, 18.b. Приводные компоненты 18.а выполнены соответственно в виде приводного двигателя, который размещен на поворотном шасси 20 соответствующей мотор-вагонной единицы 12. Приводные компоненты 18.b выполнены соответственно в качестве устройства снабжения мощностью, в частности, в форме инвертора, который снабжает электрической энергией приданный приводной двигатель.
В соответствии с показанным исполнением приводные компоненты 18 приводного устройства 16 расположены в двух мотор-вагонных единицах сосредоточенно. При этом речь идет о головном вагоне. Также представляется возможным сосредоточение приводного устройства 16 в одном или нескольких расположенных в центре вагонах. Возможно также следующее исполнение, при котором компоненты 18 приводного устройства 16 распределены по нескольким мотор-вагонным единицам 14. Головные вагоны в рассматриваемом исполнения выполнены соответственно в качестве моторных вагонов, содержащих пассажирские салоны. Представляется возможным альтернативное исполнение в качестве моторного вагона, который не предусмотрен для транспортировки пассажиров.
Для снабжения приводного устройства 16 электрической энергией в каждой мотор-вагонной единице предусмотрены соответственно, по меньшей мере, один токосъемник 22, главный выключатель 24 и подвод 26 тока для преобразованного снятого с помощью токосъемника 22 на стороне сети постоянного или переменного напряжения (соответственно в схематическом изображении). Подвод 26 тока питает не изображенную более подробно промежуточную цепь, из которой приводное устройство 16 и при необходимости вспомогательное устройство обеспечения эксплуатации получают электрическую энергию.
Далее каждая мотор-вагонная единица 12 оснащена тормозным устройством 30. Каждое тормозное устройство 30 выполнено для автономной эксплуатации соответствующей мотор-вагонной единицы 12 в разъединенном состоянии состава 10 рельсовых транспортных средств. В частности, тормозные устройства 30 соответственно отвечают всем предписанным требованиям безопасности, так что каждая мотор-вагонная единица 12.1 или 12.2 допущена с учетом этих требований для эксплуатации отдельно от следующих мотор-вагонных единиц 12.
Каждое тормозное устройство 30 содержит, по меньшей мере, две тормозных системы 32, 34, которые отличаются друг от друга в отношении технологии торможения. В рассматриваемом исполнении первая тормозная система 32 выполнена в качестве фрикционного тормоза. В качествен второй тормозной системы 34 предусмотрен электродинамический тормоз, который образован, по меньшей мере, составными частями соответствующего приводного устройства 16, в частности, приводным компонентом 18.а. Конструкция и принцип действия фрикционного тормоза и электродинамического тормоза для рельсового транспортного средства являются общеизвестными и не поясняются здесь более подробно.
Мотор-вагонные единицы 12 оснащены, кроме того, соответственно системой 36 технического управления. Она предусматривает, в частности, объединение в сеть применительно к данным и техническим параметрам управления подлежащих управлению конечных функциональных элементов и соответствующих блоков управления соответствующей мотор-вагонной единицы 12 с помощью, по меньшей мере, одной системы 38 шин. Это также общеизвестно и не поясняется здесь более подробно. Стандартизированная архитектура для коммуникации на протяжении всего состава описана, например, в стандарте TCN (или «Train Communication Network»).
В соединенном состоянии комбинации 10 рельсовых транспортных средств производят соединение между собой обеих систем 36 технического управления применительно к технике данных и технике управления мотор-вагонных единиц 12.1, 12.2. В частности, для этого соответствующие системы 38 шин соединяют между собой с помощью интерфейсов 40. Они расположены, в частности, в области междувагонного соединения мотор-вагонных единиц 12. В частности, интерфейсы 40 расположены соответственно в известной под определением «передняя муфта» сцепной муфте соответствующей мотор-вагонной единицы 12.1 или 12.2.
Тормозное устройство 30 в каждой мотор-вагонной единице 12 содержит, по меньшей мере, один блок 42 управления торможением, который предусмотрен для управления соответствующими тормозными системами 32, 34. Блок 42 управления торможением содержит комплект распределено расположенных в единицах 14 транспортных средств, локальных блоков 43 управления, которые служат соответственно для локального управления тормозными компонентами тормозных систем 32, 34. Для повышения наглядности фигуры для этих блоков 43 управления в единице 14 транспортного средства показан исключительно один локальный блок управления. Далее, устройство 42 управления торможением содержит центральное, вышестоящее по сравнению с локальными блоками 43 управления устройство 44 управления, которое соединено с ними с помощью системы 38 шин.
Посредством локальных блоков 43 управления и центрального устройства 44 управления создана иерархическая система управления торможением, которая пояснена ниже. Описание относится в общем к мотор-вагонной единице 12, однако используется также для обеих мотор-вагонных единиц 12.1, 12.2 рассматриваемого примера исполнения.
В каждой мотор-вагонной единице 12 каждой единице 14 транспортного средства придан тормозной блок 46 (см. фиг. 2). Он образован локальными тормозными компонентами тормозных систем 32, 34 и локальным блоком 43 управления или локальными блоками 43 управления. Это назначение осуществляют независимо от локального оснащения единиц 14 транспортных средств, в частности, независимо от того, содержит ли соответствующая единица 14 транспортного средства приводные компоненты 18.а, 18b приводного устройства 16 или же только компоненты тормозной системы 32. Единица 14 транспортного средства оснащена компонентами тормозной системы 32 и/или тормозной системы 34, причем приданный тормозной блок 46 предусмотрен для механического или электродинамического торможения. Комплект тормозных блоков 46 образует нижний -уровень иерархической системой управления торможением, которая содержит в расположенном выше, среднем уровне центральное устройство 44 управления.
Одна функция центрального устройства 44 управления заключается, в частности, в сборе данных, которые поступают в распоряжение от локальных блоков 43 управления. Эти данные базируются на параметрических величинах, которые распознают в единицах 14 транспортных средств, и, по меньшей мере, являются репрезентативными для фактического состояния соответствующего тормозного блока 46. Репрезентативными могут быть, например, данные для мгновенного тормозного действия, которое может быть реализовано в зависимости от местных условий тормозным блоком 46.
В центральное устройство 44 управления может быть имплементирован алгоритм распределения, который на базе заранее заданного, подлежащего приложению тормозным устройством 30 заданного тормозного действия и собранных данных распределяет это заданное тормозное действие на частичные тормозные действия, которые назначают соответственно для одного из различных тормозных блоков 46 мотор-вагонной единицы.
В соединенном состоянии комбинации 10 рельсовых транспортных средств за счет соединения соответствующих систем 38 шин возникает соединение тормозных устройств 30 - в частности, блоков 42 управления торможением - обеих мотор-вагонных единиц 12.1, 12.2. Это физическое соединение используют с целью создания уровней управления на протяжении всего состава, которые являются вышестоящими по отношению к блокам 42 управления торможением. Это производят с помощью центральных устройств 44 управления, которые соответственно подготовлены с взаимодействием через тормозную систему 38 для образования этого простирающегося на протяжении всего состава верхнего уровня управления.
Относительно распределения тормозного действия устройствами 44 управления, которые соединены между собой через выполняющие функции технического управления системы 36, образована охватывающая всю комбинацию система 47 управления тормозным действием. Функция системы 47 управления тормозным действием заключается, в частности, в распределении тормозного действия по тормозным блокам 46 мотор-вагонных единиц 12.1, 12.2. В рассматриваемом исполнении устройство 44 управления первой мотор-вагонной единицы 12.1 выполнена в качестве блока управления системы 47 управления тормозным действием. Для этого она оснащена соответствующим алгоритмом распределения. В альтернативном исполнении представляется возможным выполнение этой функции устройством 44 управления второй мотор-вагонной единицы 12.1 или во взаимодействии обоих устройств 44 управления.
Блок управления системы 47 управления тормозным действием оценивает - при исполнении программы в соответствии с алгоритмом распределения - параметры торможения, которые поступают от тормозных блоков 46 обеих мотор-вагонных единиц 12.1, 12.2. Прием этих данных производится с помощью информационного интерфейса 48 (см. фиг. 1). В качестве параметров торможения тормозного блока 46 используют, в частности мгновенное тормозное действие - то есть, которое может быть приложено в актуальный момент времени эксплуатации - и подлежащую торможению массу. Если тормозной блок 46 выполнен с приспособлением противоскольжения (на фигуре не показано), то сформирован следующий эксплуатационный параметр этого тормозного блока 46 в качестве эксплуатационного состояния устройства противоскольжения.
Специальный случай использования показан теперь на фиг. 2 и 3. Они показывают единицы 14 транспортных средств мотор-вагонных единиц 12.1, 12.2. В каждой единице 14 транспортного средства с помощью линии изображено частичное тормозное действие, которое назначено центральным устройством 44 управления соответствующей мотор-вагонной единицы 12.1 или 12.2 соответствующему тормозному блоку 46. В рассматриваемом примере по фиг. 2 можно заключить, что в нормальном случае в каждой мотор-вагонной единице 12 заданное тормозное действие равномерно распределено по тормозным блокам 46.
В показанной на фиг. 3 эксплуатационной ситуации один тормозной блок 46 в первой мотор-вагонной единице 12.1 сигнализирует центральному устройству 44 управления о невозможности выработки тормозного действия, например, вследствие технической неисправности. После этого производят новое распределение заданного тормозного действия, которое должно быть реализовано обоими тормозными устройства 30, по тормозным блокам 46 комбинации 10 рельсовых транспортных средств. Это осуществляют с помощью системы 47 управления тормозным действием, которая на базе данных всех тормозных блоков 46 состава 10 рельсовых транспортных средств назначает для этих тормозных блоков 46 частичные тормозные действия. Сбор данных, а также распределение и назначение частичных тормозных действий можно производить с помощью центральных устройств 44 управления или на основании их взаимодействия, а передачу данных можно производить с помощью соединенных между собой систем 38 шин. За счет простирающегося на протяжении всей комбинации распределения можно производить простирающуюся на протяжении всего состава компенсацию тормозного действия, которое не может быть реализовано неисправным тормозным блоком 46, на тормозных блоках 46 всего состава 10 рельсовых транспортных средств. Это компенсационное тормозное действие в рассматриваемом исполнении равномерно распределяют по работоспособным тормозным блокам 46 всего состава 10 рельсовых транспортных средств. При нежелательном ограничении компенсации применительно к мотор-вагонной единице 12.1, которая работает в ошибочном режиме, по сравнению с распределением в соответствии с фиг. 3 произошло бы более высокое нагружение тормозных блоков 46 этой мотор-вагонной единицы 12.1.
В изображениях по фиг. 2 и 3 не делают различия между механическим и электродинамическим торможением.
Фиг. 4 и фиг. 5 показывают в следующем случае использования опять же с помощью линий распределение частичных приводных действий по тормозным блокам 46, причем для головного вагона, который соответственно оснащен приводными компонентами 18 приводного устройства 16, делают различие между механической долей (соответственно левая линия) и электродинамической долей (соответственно правая линия).
Как показано на фиг. 4, для нормального случая эксплуатации при назначении частичных тормозных действий определяют приоритет малоизношенных генераторных компонентов тормозного устройства 30. В изображенном случае в каждой мотор-вагонной единице 12 осуществляют равномерное распределение заданного тормозного действия по генераторным компонентам тормозных узлов 46.
В изображенной на фиг. 5 эксплуатационной ситуации от тормозного блока 46 первого головного вагона первой мотор-вагонной единицы 12.1 поступает сообщение о невозможности выдачи тормозного действия генераторными компонентами тормозного блока 46, например, в результате технической неисправности. После этого производят повторное распределение заданного тормозного действия, которое должно быть выработано обоими тормозными устройства 30, по тормозным блокам 46 состава 10 рельсовых транспортных средств. Это происходит в охватывающем всю длину комбинации управляющем уровне с помощью системы 47 управления тормозным действием, которая на основании данных всех тормозных блоков 46 комбинации 10 рельсовых транспортных средств назначает частичные тормозные действия этим тормозным блокам 46. При этом далее производят определение приоритета генераторных компонентов тормозных блоков 46. Сбор данных, а также распределение и назначение частичных тормозных действий можно осуществлять с помощью одного из центральных устройств 44 управления или на основании взаимодействия их друг с другом и с помощью передачи данных, осуществляемой через соединенные друг с другом системы 38 шин. За счет распределения на протяжении всей комбинации можно осуществлять на протяжении всего состава компенсацию отсутствующего тормозного действия, которое не может быть выполнено неисправным тормозным блоком 46, на пригодных для электродинамического торможения тормозных блоках 46 общей комбинации 10 рельсовых транспортных средств. При неблагоприятном ограничении компенсации для мотор-вагонной единицы 12.1, которая работает в ошибочном режиме, по сравнению с распределением в соответствии с фиг. 5 потребовалось бы более высокое нагружение других, оснащенных генераторными компонентами тормозных блоков 46 и/или активация механических компонентов тормозных блоков 46 этой мотор-вагонной единицы 12.1.
В рассматриваемом примере исполнения в основу алгоритма распределения дополнительно положена оптимизация коэффициента сцепления. При этом подлежащие назначению частичные тормозные действия могут быть рассчитаны для минимизации используемого коэффициента сцепления, причем нагружение тормозных блоков 46 производят предпочтительно до определенной предельной величины коэффициента сцепления. Если ни один из тормозных блоков 46, которые оснащены устройством противоскольжения, не сигнализирует об активном эксплуатационном состоянии приданного устройства противоскольжения, то алгоритм распределения учитывает первое определенное предельное значение коэффициента сцепления. Если, по меньшей мере, один из этих тормозных блоков 46 выдает сообщение об активном эксплуатационном состоянии приданного устройства противоскольжения, то алгоритм распределения учитывает второе определенное, меньшее граничное значение коэффициента сцепления. Таким образом распределение тормозного действия может быть несложным образом согласовано алгоритмом распределения с плохими условиями рельсового пути.
Группа изобретений относится к области транспортного машиностроения. Комбинация рельсовых транспортных средств включает в себя одну первую мотор-вагонную единицу и вторую мотор-вагонную единицу, содержащие соответственно приводное устройство и тормозное устройство. Тормозные устройства двух мотор-вагонных единиц содержат соответственно несколько тормозных блоков. В соединенном состоянии образована вышестоящая в отношении тормозных устройств, соединенная с ними система управления тормозным действием, которая предусмотрена для распределения тормозного действия по тормозным блокам двух мотор-вагонных единиц. Достигается возможность гибкого использования производственных мощностей соединенных мотор-вагонных единиц. 2 н. и 6 з.п. ф-лы, 5 ил.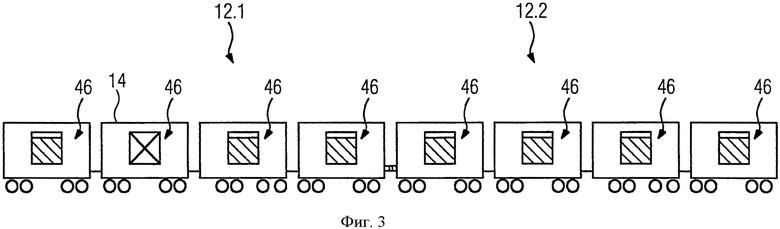
1. Комбинация рельсовых транспортных средств, содержащая одну первую мотор-вагонную единицу (12.1) и, по меньшей мере, одну вторую мотор-вагонную единицу (12.2), которые содержат соответственно приводное устройство (16) и тормозное устройство (30), причем тормозные устройства (30), по меньшей мере, двух мотор-вагонных единиц (12.1, 12.2) содержат соответственно множество тормозных блоков (46), отличающаяся тем, что
- в соединенном состоянии образована вышестоящая по сравнению с тормозными устройствами (30), соединенная с ними система (47) управления тормозным действием, которая предназначена для распределения тормозного действия по тормозным блокам (46), по меньшей мере, двух мотор-вагонных единиц (12.1, 12.2),
- система (47) управления тормозным действием содержит соединенный с тормозными устройствами (30) мотор-вагонных единиц (12.1, 12.2) информационный интерфейс (48), с помощью которого производится сбор параметров торможения множества тормозных блоков (46) мотор-вагонных единиц (12.1, 12.2),
- система (47) управления тормозным действием оснащена алгоритмом распределения, который предназначен для распределения соответственно частичного тормозного действия тормозным блокам (46) на базе параметров торможения,
- тормозные блоки (46) оснащены устройством противоскольжения, причем в качестве параметра торможения этих тормозных блоков (46) соответственно используют эксплуатационное состояние устройства противоскольжения, и
- алгоритм распределения предназначен для учета при неактивных устройствах противоскольжения в мотор-вагонных единицах (12.1, 12.2) одного первого предельного значения коэффициента сцепления для расчета подлежащих распределению частичных тормозных действий и при, по меньшей мере, одном активном устройстве противоскольжения - для учета второго предельного значения коэффициента сцепления для расчета подлежащих распределению частичных тормозных действий, которое меньше, чем первое предельное значение коэффициента сцепления.
2. Комбинация рельсовых транспортных средств по п. 1, отличающаяся тем, что мотор-вагонные единицы (12.1, 12.2) выполнены соответственно в качестве группы единиц (14) транспортных средств, причем единицам (14) транспортных средств соответственно придан, по меньшей мере, один различный тормозной блок (46) соответствующего тормозного устройства (30).
3. Комбинация рельсовых транспортных средств по п. 1, отличающаяся тем, что система (47) управления тормозным действием предназначена для распределения тормозного действия для тормозного устройства (30) второй мотор-вагонной единицы (12.2) в зависимости от, по меньшей мере, одного параметра торможения тормозного устройства (30) первой мотор-вагонной единицы (12.1).
4. Комбинация рельсовых транспортных средств по п. 1, отличающаяся тем, что в качестве параметров торможения тормозного блока (46) используют, по меньшей мере, тормозное действие, которое реализуется с помощью тормозного блока (46), и подлежащую торможению массу.
5. Комбинация рельсовых транспортных средств по п. 3, отличающаяся тем, что система (47) управления тормозным действием предназначена для распределения, по меньшей мере, одной части подлежащего компенсации тормозного действия, по меньшей мере, одному тормозному блоку (46) второй мотор-вагонной единицы (12.2) при ошибке эксплуатации тормозного устройства (30) первой мотор-вагонной единицы (12.1).
6. Комбинация рельсовых транспортных средств по п. 5, отличающаяся тем, что система (47) управления тормозным действием предназначена для равномерного распределения подлежащего компенсации тормозного действия на прочие тормозные блоки (46) мотор-вагонных единиц (12.1, 12.2) при полном выходе из строя тормозного блока (46) тормозного устройства (30) первой мотор-вагонной единицы (12.1).
7. Комбинация рельсовых транспортных средств по любому из пп. 1-6, отличающаяся тем, что тормозные устройства (30), по меньшей мере, двух мотор-вагонных единиц (12.1, 12.2) содержат соответственно устройство (44) управления, причем, по меньшей мере, две мотор-вагонные единицы (12.1, 12.2) содержат соответственно каждая систему (36) технического управления, причем системы (36) технического управления в состоянии соединения соединены между собой, при этом система (47) управления тормозным действием образована, по меньшей мере, устройствами (44) управления, которые соединены между собой с помощью систем (36) технического управления.
8. Способ торможения комбинации (10) рельсовых транспортных средств, включающей в себя одну первую мотор-вагонную единицу (12.1) и, по меньшей мере, одну вторую мотор-вагонную единицу (12.2), которые содержат соответственно приводное устройство (16) и тормозное устройство (30), причем тормозные устройства (30), по меньшей мере, двух мотор-вагонных единиц (12.1, 12.2) содержат соответственно множество тормозных блоков (46), отличающийся тем, что
- в соединенном состоянии комбинации (10) рельсовых транспортных средств образована вышестоящая по сравнению с тормозными устройствами (30), соединенная с ними система (47) управления тормозным действием,
- с помощью системы (47) управления тормозным действием осуществляют распределение тормозного действия по тормозным блокам (46), по меньшей мере, двух мотор-вагонных единиц (12.1, 12.2), причем система (47) управления тормозным действием содержит соединенный с тормозными устройствами (30) мотор-вагонных единиц (12.1, 12.2) информационный интерфейс (48), с помощью которого производят сбор параметров торможения множества тормозных блоков (46) мотор-вагонных единиц (12.1, 12.2), с помощью системы (47) управления тормозным действием посредством алгоритма распределения на базе собранных параметров торможения распределяют соответственно частичное тормозное действие тормозным блокам (46) мотор-вагонных единиц (12.1, 12.2), причем тормозные блоки (46) оснащены устройством противоскольжения, и в качестве параметра торможения этих тормозных блоков (46) соответственно используют эксплуатационное состояние устройства противоскольжения, с помощью алгоритма распределения при неактивных устройствах противоскольжения в мотор-вагонных единицах (12.1, 12.2) учитывают одно первое предельное значение коэффициента сцепления для расчета подлежащих распределению частичных тормозных действий, а при, по меньшей мере, одном активном устройстве противоскольжения - для учета второго предельного значения коэффициента сцепления для расчета подлежащих распределению частичных тормозных действий, которое меньше, чем первое предельное значение коэффициента сцепления, и
- процесс торможения осуществляют в соответствии с распределением тормозного действия.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Линия отделки щитовых деталей лакокрасочными материалами | 1984 |
|
SU1266814A1 |
| Способ монтажа башенных кранов | 1961 |
|
SU152300A1 |
| Способ определения мгновенной полярности одной цепи переменного тока по отношению к другой | 1949 |
|
SU78154A1 |

