Изобретение относится к устройству для управления механизмами приводной системы рельсового транспортного средства, включающему вычислительный блок и блок памяти для сохранения по меньшей мере одного программного модуля управления приводом, причем этот модуль предназначен для выполнения вычислительным блоком по меньшей мере одной функции управления приводом.
Эксплуатация рельсового транспортного средства включает, в частности, управление приводным механизмом, предназначенным для создания в тяговом режиме приводного вращательного момента. Функции управления приводом реализует вычислительный блок, выполняющий соответствующие программы управления приводом. В приводном механизме с электродвигателями и соответствующими тяговыми преобразователями функция управления приводом заключается в реализации алгоритма переключения вентилей статического преобразователя тока для создания электрической мощности.
Эксплуатация рельсового транспортного средства включает наряду с выполнением управления приводом реализацию других аспектов, связанных с другими задачами управления.
В основу данного изобретения положено создание в соответствии с родовым понятием устройства, обеспечивающего возможность малых конструктивных затрат при реализации функций управления.
Для этого предложено, чтобы накопительный блок сохранял по меньшей мере один программный модуль управления тормозами, причем этот модуль предназначен для выполнения вычислительным блоком по меньшей мере одной функции управления тормозами тормозной системы рельсового транспортного средства. Это обеспечивает возможность особенно малых конструктивных затрат при реализации задач управления приводом и тормозами. Реализация по меньшей мере одной функции управления приводом и по меньшей мере одной функции управления тормозами единым вычислительным блоком обеспечивает возможность экономии монтажного пространства, стоимости и веса при конструировании рельсового транспортного средства. Кроме этого обеспечено снижение энергопотребления.
Под программным «модулем» управления приводом или тормозами необходимо понимать, в частности, по меньшей мере составную часть программы управления приводом или программы управления тормозами, предназначенную для выполнения определенной функции управления приводом или тормозами. Модуль программы управления приводом предназначен предпочтительно для реализации вычислительным блоком по меньшей мере одной функции управления приводом в тяговом режиме рельсового транспортного средства. В этом тяговом режиме управление приводным механизмом нацелено на создание приводного вращательного момента. Программа управления приводом и/или тормозами может включать только один модуль или несколько модулей, каждый из которых предназначен для реализации одной из многих функций управления.
Устройство предпочтительно функционально соединено с блоком, отдающим управляющие сигналы на приводной механизм и/или на тормозной механизм, причем реализация функции управления приводом или тормозами основана на этих управляющих сигналах. В частности, эти управляющие сигналы могут быть отданы вручную машинистом рельсового транспортного средства и/или автоматически системой управления рельсового транспортного средства.
Для реализации функции управления приводом и/или тормозами устройство предпочтительно соединено функционально с блоком, отдающим по меньшей мере один сигнал для по меньшей мере одного рабочего параметра рельсового транспорта. Блок выдает, например, сигнал с информацией о скорости, массе и т.п. рельсового транспортного средства, направляемый далее в устройство. Вычислительный блок - независимо от виртуальной связи физически независимых, самостоятельных, распределенных, в частности, по рельсовому транспортному средству блоков - является предпочтительно взаимосвязанным блоком, включающим, в частности, по меньшей мере процессор. Вычислительный блок включает, по меньшей мере, один процессор, выполненный как одноядерный процессор («Single-Core Processor») или как многоядерный процессор («Multi-Core Processor»).
Комбинированная реализация вычислительным блоком программного модуля управления приводом и программного модуля управления тормозами происходит с высокой производительностью, если вычислительный блок оснащен по меньшей мере двумя рабочими процессорами, причем по меньшей мере в одной рабочей фазе за программный модуль управления приводом и за программный модуль управления тормозами отвечает отдельный процессор. Если вычислительный блок оснащен одноядерным процессором, то блоки процессора выполнены предпочтительно с логическим и/или динамическим распределением памяти. Выполнение блоков процессора, в частности, зависит от статического или динамического распределения ресурсов для выполняемых модулей. Если вычислительный блок оснащен многоядерным процессором, то блоки процессора сформированы предпочтительно разными ядрами процессора.
Если тормозная система рельсового транспортного средства выполнена с пневмоуправлением, то вычислительный блок выполняет высокоприоритетную и объемную задачу управления тормозной системой с программным модулем управления тормозами для функции управления клапанами пневмотормозов. При этом устройство по данному изобретению функционально соединено предпочтительно по меньшей мере с системой клапанов тормозной системы, предназначенной для управления рабочим давлением сжатого воздуха для привода элементов тормозной системы.
Вычислительный блок выполняет также очень важную задачу управления тормозной системой, если программный модуль управления тормозами предназначен для функции противопробуксовочной защиты. При этом устройство по данному изобретению функционально соединено предпочтительно с системой датчиков, предназначенной для контролирования по меньшей мере соответствующей оси рельсового транспортного средства или по меньшей мере для регистрирования соответствующих параметров этой оси. Реализуемая вычислительным блоком функция противопробуксовочной защиты заключается в анализе этих параметров и полученных от входного сигнала рабочих параметров рельсового транспортного средства, в частности его скорости, и при необходимости в инициации соответствующего действия тормозной системы.
Если приводная система оснащена по меньшей мере одним электродвигателем и тяговым преобразователем для питания электродвигателя, то вычислительный блок выполняет высокоприоритетную и объемную задачу управления приводной системой с программным модулем управления приводом, предназначенным для управления тяговым преобразователем. Выполняемая программным модулем функция управления приводом, в частности в тяговом режиме, предпочтительно заключается при этом в реализации алгоритма переключения вентилей статического преобразователя тока для создания электрической мощности для по меньшей мере одного электродвигателя.
Вычислительный блок и по меньшей мере один компонент накопительного блока размещены в различных, автономных узлах рельсового транспортного средства. Однако можно обеспечить компактное выполнение устройства при размещении вычислительного и накопительного блока в одном корпусе.
Предпочтительно также оснащение устройства системой электропитания компонентов корпуса. Единая для компонентов корпуса система электропитания предпочтительно обеспечивает экономию монтажного пространства.
В одном из предпочтительных вариантов осуществления изобретения предложено оснащение устройства коммуникационным модулем, предназначенным для обмена данными с системой управления рельсовым транспортным средством. Коммуникационный модуль предпочтительно представляет собой коммуникационный интерфейс по меньшей мере одного компонента устройства, в частности его вычислительного блока, и информационной шины рельсового транспортного средства, через который данные и управляющие команды системы управления рельсовым транспортным средством поступают в этот компонент.
Изобретение основано также на способе управления приводной системой рельсового транспортного средства, при котором вычислительный блок реализует по меньшей мере одну функцию управления приводом.
Кроме того, предусмотрено выполнение вычислительным блоком по меньшей мере функции управления тормозами тормозной системы рельсового транспортного средства. Предпочтительный технический результат этого способа в целях избежания повторений указан в вышеприведенных обоснованиях устройства по данному изобретению.
Один из вариантов осуществления изобретения поясняется чертежами, на которых представлено следующее:
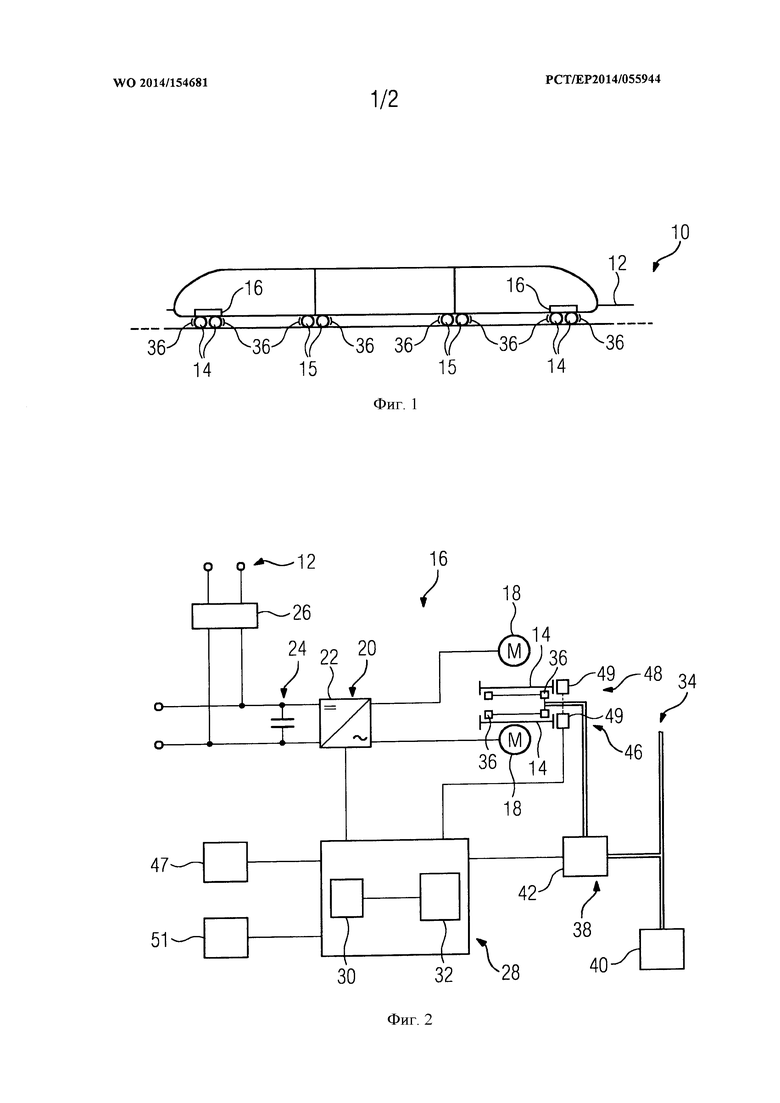
фиг. 1 - рельсовое транспортное средство с элементами приводной системы и с тормозной системой;
фиг. 2 - один из элементов приводной системы и тормозная система по фиг. 1 и устройство управления приводной системой и тормозной системой; и
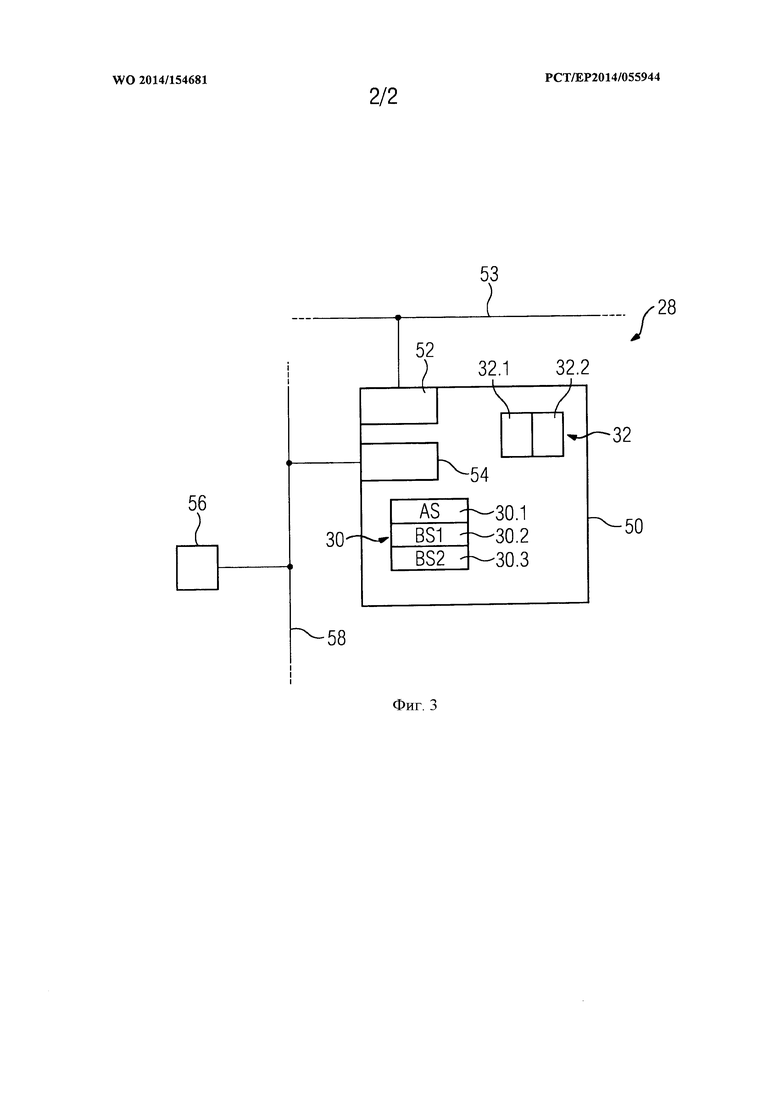
фиг. 3 - подробный вид устройства по фиг. 1 со схемой боковой проекции рельсового транспортного средства 10.
В рассмотренном варианте осуществления изобретения рельсовое транспортное средство 10 выполнено в виде мотор-вагонного подвижного состава с электроприводом, запитанным от сети электроснабжения через токоприемник. В частности, электроснабжение от сети поступает на выполненный в виде токоведущей шины сетевой источник электропитания 12, причем электропитанием служит, в частности, постоянное напряжение.
В другом варианте осуществления изобретения рельсовое транспортное средство 10 оборудовано для получения сетевого электроснабжения от воздушной линии электропередачи, причем электропитанием служит постоянный или переменный ток. Рельсовое транспортное средство 10 может быть также оборудовано электрогенератором, вырабатывающим электроэнергию с помощью двигателя на моторном топливе.
Рельсовое транспортное средство 10 включает ведущие оси 14 с возможностью привода от агрегатов 16 приводной системы, причем для каждой пары ведущих осей 14, установленных, в частности, на одной тележке, предназначен отдельный агрегат 16 приводной системы. При этом агрегаты 16 приводной системы оборудованы отдельным электродвигателем 18, предназначенным для каждой из соответствующих ведущих осей 14 (фиг. 2). Рельсовое транспортное средство 10 включает также неведущие оси, называемые также бегунковые оси 15. Вариант выполнения одного из агрегатов 16 приводной системы по фиг. 1 показан на фиг. 2.
Агрегаты 16 приводной системы включают электродвигатели 18, состыкованные с соответствующими ведущими осями 14 и включающие энергоснабжающий блок 20 для обеспечения в тяговом режиме электрической мощностью соответствующих электродвигателей 18. Показанный энергоснабжающий блок 20 включает предназначенный для пары электродвигателей 18 тяговый преобразователь 22. В альтернативном варианте осуществления изобретения каждый из предназначенных для соответствующего электродвигателя 18 энергоснабжающий блок 20 включает отдельный тяговый преобразователь 22.
Энергоснабжающий блок 20 в тяговом режиме получает электроэнергию от промежуточного контура 24 постоянного тока. Если рельсовое транспортное средство 10 в рассматриваемом варианте осуществления изобретения эксплуатируют с подключением постоянного тока, то промежуточный контур 24 постоянного тока запитывают, как показано, напрямую, т.е. минуя промежуточное подключение преобразователя напряжения, от потенциального входа, т.е. от сетевого источника питания 12. Между промежуточным контуром 24 постоянного тока и источником питания подключают дополнительные агрегаты, в частности, например, фильтр 26. Если рельсовое транспортное средство 10 эксплуатируют с подключением переменного тока, то между потенциальным входом и промежуточным контуром 24 постоянного тока подключают преобразователь напряжения, например, с трансформатором и выпрямителем, преобразующими входное напряжение в постоянный ток промежуточного контура 24 постоянного тока. Схема тягового преобразователя 22 включает, как известно, элементы, производящие из постоянного напряжения промежуточного контура 24 постоянного тока по определенному алгоритму включения электрический ток для питания электродвигателей 18, параметры которого соответствуют производимой мощности. Элементы схемы известны в кругу специалистов под понятием «вентили статистического преобразователя тока». Энергоснабжающим блоком 20 управляет устройство 28, функционально соединенное для реализации технологии управления с энергоснабжающим блоком 20. Устройство 28 вырабатывает, в частности, команды управления согласно алгоритму включения для элементов схемы по меньшей мере одного тягового преобразователя 22. Для реализации этой функции управления приводом, в частности функции управления тяговым преобразователем для энергоснабжающего блока 20, установлен по меньшей мере программный модуль управления приводом, причем этот модуль сохранен в накопительном блоке 30 с возможностью его выполнения вычислительным блоком 32 устройства 28. Устройство 28 в кругу специалистов известно под понятием «блок управления приводом» (ASG).
Рельсовое транспортное средство 10 включает также тормозную систему 34 со схематически показанными на фиг. 1 фрикционно-тормозными элементами 36. Эти элементы при начале процесса торможения приводит в действие пневматический исполнительный орган 36. Тормозная система 34 включает для этого, как известно, воздушный компрессор 40, обеспечивающий сжатым воздухом работу фрикционно-тормозных элементов 36. Фрикционно-тормозные элементы 36 приводит в действие система управления назначенного одному из этих фрикционно-тормозных элементов 36 клапана 42 пневматического исполнительного органа 38, управляющего давлением сжатого воздуха, необходимого для работы фрикционно-тормозных элементов 36.
На фиг. 2 показаны электродвигатели 18, соответствующие фрикционно-тормозным элементам 36, и клапан 42 для приведения в действие фрикционно-тормозных элементов 36. Устройство 28 предназначено для выполнения функции управления тормозами, в частности функции управления клапанами пневмотормозов, которая управляет назначенным фрикционно-тормозным элементам 36 клапаном 42. Для этого в накопительном блоке 30 сохранен соответствующий программный модуль управления тормозами, реализуемый вычислительным блоком 32. При реализации модуля устройство 28 выполняет функцию оборудования, известного в кругу специалистов под понятием «блок управления тормозами» (BSG).
Рельсовое транспортное средство 10 включает также противопробуксовочную систему 46. Она оборудована системой датчиков 48, предназначенной, в частности, для показанных на фиг. 2 ведущих осей 14. В рассматриваемом варианте осуществления изобретения система датчиков 48 образована тахометрическими датчиками 49. Сравнительный анализ зарегистрированного системой датчиков 48 параметра и рабочего параметра рельсового транспортного средства 10, в частности скорости транспортного средства, способствует регистрированию пробуксовки, контролируемой системой датчиков 48 оси 14 в режиме торможения, причем это регистрирование служит для команды на соответствующие контрмеры тормозной системы 34. Устройство 28 предназначено для выполнения функции противопробуксовочной защиты тормозной системой 34. При этом управление тормозной системой 34 основано на по меньшей мере одном зарегистрированном системой датчиков 48 параметре. Для этого устройство 28 функционально соединено с системой датчиков 48, а в накопительном блоке 30 сохранен программный модуль управления тормозами, исполняемый вычислительным блоком 32 для реализации функции противопробуксовочной защиты. Устройство 28 функционально соединено также с выходом блока 47, выдающим сигнал передачи информации о рабочем параметре, в частности скорости движения транспортного средства.
Устройство 28 функционально соединено также с выходом блока 51, выдающим команды управления на приводную систему 16 и/или тормозную систему 34, причем реализация функции управления приводом или функции управления тормозами основана на этих командах управления. Команды управления генерирует, в частности, вручную машинист рельсового транспортного средства и/или в автоматическом режиме система управления рельсового транспортного средства 10.
На фиг. 3 показан пример варианта выполнения устройства 28. Компоненты устройства 28 размещены в корпусе 50. В корпусе 50 размещен, в частности, вычислительный блок 32, выполненный в виде многоядерного процессора с по меньшей мере двумя процессорными блоками 32.1 и 32.2, образованными каждый отдельным ядром процессора. В альтернативном варианте выполнения вычислительный блок 32 выполнен в виде одноядерного процессора, причем блоки процессора 32.1 и 32.2 выполнены каждый в виде логических процессорных блоков.
Накопительный блок 30 включает несколько зон памяти 30.1, 30.2, 30.3, предназначенных, в частности, для хранения программного модуля AS управления приводом (например, вышеназванный модуль выполнения функции управления тяговым преобразователем), первого программного модуля BS1 управления тормозами (например, вышеназванного модуля выполнения функции управления клапанами пневмотормоза) или второго программного модуля BS2 управления тормозами для выполнения функции противопробуксовочной защиты. Процессорный блок 32.1 предназначен предпочтительно для программного модуля AS управления приводом, а процессорный блок 32.2. предназначен предпочтительно для программного модуля BS1 и/или BS2 управления тормозами. Если процессорные блоки 32.1 и 32.2 выполнены как логические процессорные блоки, то они образованы распределением объема памяти одноядерного процессора, причем одна область памяти предназначена для программного модуля AS управления приводом, а другая область памяти предназначена для программного модуля BS1 и/или BS2 управления тормозами. В корпусе 50 размещен также энергоснабжающий блок 52, называемый также «сетевой блок питания», обеспечивающий компоненты корпуса 50 электрическим напряжением. Энергоснабжающий блок 52 подключен, в частности, к бортовой сети 53 рельсового транспортного средства 10.
Установлен также коммуникационный модуль 54, предназначенный для обмена данными между компонентами устройства 28, в частности между вычислительным блоком 32 и системой управления 56 рельсового транспортного средства 10. Этот обмен данными происходит, в частности, по шине 58 рельсового транспортного средства 10, к которой подключены коммуникационный модуль 54 и система управления 36 рельсового транспортного средства. В рассматриваемом варианте осуществления изобретения коммуникационный модуль 54 размещен в корпусе 50. В кругу специалистов коммуникационный модуль 54 известен под понятием «шинное подключение». Система управления 56 рельсового транспортного средства выполнена, в частности, в виде центрального бока управления («ZSG»). Система управления 56 рельсового транспортного средства и вышеназванный блок 51 идентичны друг другу, выполнены частично как одно целое или отличны друг от друга.
На фигуре в накопительном блоке 30 показаны только вышеназванные программные модули AS, BS1 и BS2 управления приводом и управления тормозами. Однако накопительный блок 30 может хранить подавляющую долю всех программных модулей управления приводом и управления тормозами. Для накопительного блока 30 возможны следующие варианты выполнения и их комбинации:
- области памяти накопительного блока 30 выполнены как области физически единой памяти или как физически отдельные области памяти;
- накопительный блок 30 размещен в рассматриваемом варианте выполнения в корпусе 50, причем в альтернативном варианте выполнения по меньшей мере одна область памяти накопительного блока 30 или весь накопительный блок 30 размещены вне корпуса 50.
На фиг. 2 показано взаимодействие устройства 28 с механизмом 16 приводной системы и компонентом 34 тормозной системы определенной пары ведущих осей 14, т.е. определенной тележки. Устройство 28 предназначено также для выполнения функции управления компонентами тормозной системы непоказанных бегунковых осей 15. Показанный на фиг. 1 вариант выполнения рельсового транспортного средства 10 с двумя механизмами 16 приводной системы допускает наличие двух моторно-тяговых половин, причем каждая из них оснащена своим устройством 28. В этом случае оба устройства 28 соединены с агрегатом 16 приводной системы и компонентами тормозной системы соответствующей моторно-тяговой половины. В альтернативном варианте устройство 28 выполнено в виде центрального блока, соединенного по технологии управления со всеми механизмами 16 приводной системы и со всеми компонентами 34 тормозной системы рельсового транспортного средства 10. Однако возможны также и другие варианты компоновки.
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте для управления механизмами приводной системы рельсового транспортного средства. Устройство содержит вычислительный блок и накопительный блок для хранения по меньшей мере одного программного модуля управления приводом, причем модуль предназначен для реализации вычислительным блоком по меньшей мере одной функции управления приводом. Причем накопительный блок предназначен для хранения по меньшей мере одного программного модуля (BS1, BS2) управления тормозами, предназначенного для реализации вычислительным блоком по меньшей мере одной функции управления компонентами тормозной системы рельсового транспортного средства, при этом вычислительный блок предназначен для эксплуатации по меньшей мере двух процессорных блоков, причем по меньшей мере в одном рабочем режиме программному модулю управления приводом и программному модулю (BS1, BS2) управления тормозами выделен каждому отдельный процессорный блок. Достигается снижение энергопотребления и экономия монтажного пространства. 3 н. и 8 з.п. ф-лы, 3 ил.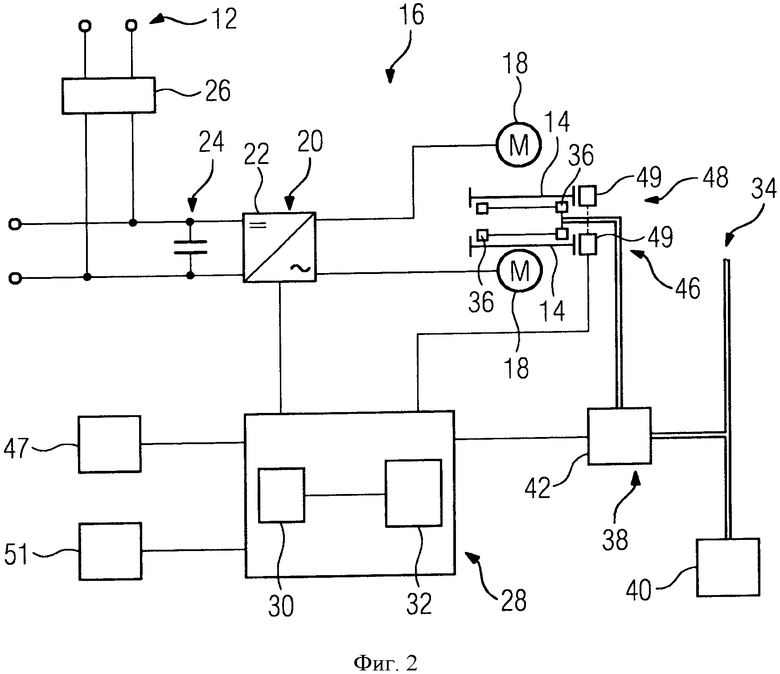
1. Устройство для управления механизмами (16) приводной системы рельсового транспортного средства (10), содержащее вычислительный блок (32) и накопительный блок (30) для хранения по меньшей мере одного программного модуля (AS) управления приводом, причем модуль (AS) предназначен для реализации вычислительным блоком (32), по меньшей мере, одной функции управления приводом,
отличающееся тем, что
накопительный блок (30) предназначен для хранения по меньшей мере одного программного модуля (BS1, BS2) управления тормозами, причем модуль (BS1, BS2) предназначен для реализации вычислительным блоком (32) по меньшей мере одной функции управления компонентами (34) тормозной системы рельсового транспортного средства (10), причем вычислительный блок (32) предназначен для эксплуатации по меньшей мере двух процессорных блоков (32.1, 32.2), причем по меньшей мере в одном рабочем режиме программному модулю (AS) управления приводом и программному модулю (BS1, BS2) управления тормозами выделен каждому отдельный процессорный блок (32.1, 32.2).
2. Устройство по п. 1, отличающееся тем, что программный модуль (BS1) управления тормозами предназначен для реализации функции управления клапанами пневмотормозов.
3. Устройство по п. 1, отличающееся тем, что программный модуль (BS2) управления тормозами предназначен для реализации функции противопробуксовочной защиты.
4. Устройство по любому из пп. 1-3, отличающееся тем, что программный модуль (AS) управления приводом предназначен для реализации функции управления тяговым преобразователем.
5. Устройство по любому из пп. 1-3, отличающееся тем, что содержит корпус (50), в котором размещены вычислительный блок (32) и накопительный блок (30).
6. Устройство по п. 5, отличающееся тем, что содержит энергоснабжающий блок (52), предназначенный для электроснабжения компонентов корпуса (52).
7. Устройство по любому из пп. 1-3, отличающееся тем, что содержит коммуникационный модуль (54), предназначенный для обмена данными с системой управления (56) рельсового транспортного средства.
8. Рельсовое транспортное средство по меньшей мере с механизмом (16) приводной системы, компонентом (34) тормозной системы и устройством (28) по любому из пп. 1-7.
9. Способ управления механизмом (16) приводной системы рельсового транспортного средства (10), при котором по меньшей мере одну функцию управления приводом реализует вычислительный блок (32), отличающийся тем, что по меньшей мере одну функцию управления компонентом (34) тормозной системы рельсового транспортного средства (10) реализует вычислительный блок (32), при этом вычислительный блок (32) предназначен для эксплуатации по меньшей мере двух процессорных блоков (32.1, 32.2), причем по меньшей мере в одном рабочем режиме программному модулю (AS) управления приводом и программному модулю (BS1, BS2) управления тормозами выделен каждому отдельный процессорный блок (32.1, 32.2).
10. Способ по п. 9, отличающийся тем, что вычислительный блок (32) предназначен для реализации функции управления клапанами пневмотормозов и функцию управления тяговым преобразователем.
11. Способ по п. 9 или 10, отличающийся тем, что вычислительный блок (32) предназначен для реализации функции противопробуксовочной защиты.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| Механизм для переключения кругового хода вязальной машины на качательный и обратно | 1934 |
|
SU39306A1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| WO 2008062512 A1, 29.05.2008 | |||
| US 5568023 A, 22.10.1996. | |||

