Изобретение касается тормозной системы рельсового транспортного средства, имеющей по меньшей мере один электродинамический тормоз, который включает в себя приводной агрегат, имеющий по меньшей мере один приводной двигатель и блок снабжения мощностью для снабжения приводного двигателя в тяговом режиме приводного агрегата.
Известны рельсовые транспортные средства, у которых тормозная сила создается электрическими двигателями. Преобразуемая во время торможения двигателями в режиме генератора в электрическую энергию энергия движения транспортного средства преобразуется, например, посредством тормозного реостата в тепло или возвращается в сеть электроснабжения железной дороги или же в мобильный аккумулятор.
Наряду с электродинамическим, генераторным тормозом, рельсовые транспортные средства обычно имеют также полноценный фрикционный тормоз, у которого тормозное действие достигается пневматическим, гидравлическим и/или механическим способом.
Обычно у тормозных систем различают виды торможения «рабочее торможение» и «экстренное торможение» (также называемое «быстрое торможение» или, соответственно, «аварийное торможение»). В то время как рабочее торможение служит для уменьшения скорости поезда, в частности, до состояния останова, от экстренного торможения, кроме этого требования, рестриктивно требуется обеспечивать наибольшую возможную безопасность пассажиров, персонала и третьих лиц. Обычно для рабочего торможения предпочтительно применяется электродинамический тормоз.
При экстренном торможении генераторный тормоз, как правило, не применяется без одновременного приведения в действие фрикционного тормоза. Причина этого заключается в более низкой до сих пор отказоустойчивости электродинамического тормоза по сравнению с электропневматическим или электрогидравлическим фрикционным тормозом, так что до сих пор наибольшая возможная надежность торможения может достигаться только посредством фрикционных тормозов.
Однако в экстремальном случае, который обычно имеет место у поездов метро, это означает, что моторный вагон поезда, снабженный фрикционным тормозом и электродинамическим тормозом, имеет, в принципе, два полноценных тормозных устройства, при этом каждое в отдельности в широком диапазоне скорости движения может создавать достаточно большой тормозной момент, чтобы соблюдать заданные тормозные пути, так что в этом отношении одно тормозное устройство могло бы использоваться вместо другого.
Эти два тормозных устройства обладают различными преимуществами. В то время как фрикционный тормоз обеспечивает большую надежность в случае экстренного торможения, генераторный тормоз обладает экономическими преимуществами. Так, например, не наступает износ тормозных накладок и тормозных дисков. Кроме того, возможно частичное использование преобразованной кинетической энергии.
В основе изобретения лежит задача, повысить надежность электродинамического тормоза.
Для этого предлагается, чтобы тормозная система рельсового транспортного средства имела по меньшей мере два блока управления торможением, при этом в первом режиме торможения первый блок управления торможением в активном состоянии управляет блоком снабжения мощностью для обеспечения тормозного действия; первый блок контроля тормозного действия и блок переключений, который служит для того, чтобы, в зависимости от показателя тормозного действия в первом режиме торможения, осуществлять переключение во второй режим торможения, в котором второй блок управления торможением в активном состоянии управляет блоком снабжения мощностью для обеспечения тормозного действия. При этом может предоставляться рельсовое транспортное средство, которое обладает высокой надежностью в отношении неправильного функционирования электродинамического тормоза, так как обеспечивается предпочтительная редундантность в управлении приводным агрегатом в его режиме торможения. С помощью предлагаемой тормозной системы рельсового транспортного средства надежность электродинамического тормоза может достигать надежности традиционного фрикционного тормоза.
Блок снабжения мощностью имеет предпочтительно управляемые электронные элементы, управление которыми осуществляется в тяговом режиме в соответствии со стратегией управления - в отношении определенного достигаемого приводного момента - для снабжения приводного двигателя соответствующей электрической мощностью. Управляемые элементы выполнены, в частности, в виде переключающих или клапанных элементов, которые посредством процессов переключения соответственно стратегии переключения создают силовой ток с согласованным напряжением, частотой и/или силой тока, с помощью которого осуществляется привод приводного двигателя. В частности, блок снабжения мощностью может быть выполнен в виде инвертора, который в тяговом режиме получает необходимую энергию из промежуточного контура, например, промежуточного контура постоянного напряжения.
В режиме торможения электродинамического тормоза управление блоком снабжения мощностью или, соответственно, его управляемыми элементами целесообразным образом осуществляется посредством предусмотренного блока управления торможением таким образом, что посредством приводного двигателя, находящегося в активном соединении с блоком снабжения мощностью, создается передаваемый на ось рельсового транспортного средства тормозной момент.
Под «показателем тормозного действия» должен пониматься, в частности, показатель, посредством которого может получаться по меньшей мере одно данное о тормозном действии электродинамического тормоза. Это тормозное действие может представлять собой тормозное действие, достигнутое посредством электродинамического тормоза, или тормозное действие, достижимое посредством функционирования блока управления торможением. В первой из названных альтернатив блок контроля тормозного действия может включать в себя сенсорный блок, посредством которого может регистрироваться по меньшей мере один касающийся рельсового транспортного средства рабочий параметр, такой как, например, мгновенный показатель скорости, мгновенный показатель ускорения, показатель тормозной силы и т.д. В последней из названных альтернатив блок контроля тормозного действия может осуществлять аналитическую обработку созданных активным блоком управления торможением сигналов управления для управления блоком снабжения мощностью, чтобы определять достигаемое с помощью этих сигналов управления тормозное действие. Под «тормозным действием» может, в частности, пониматься тормозная сила или тормозной момент, который может передаваться на колесную пару рельсового транспортного средства.
Дополнительный выигрыш в надежности может достигаться за счет того, что сенсорный блок, который предусмотрен для регистрации показателя тормозного действия и используется несколькими независимыми системами, применяется без обратного действия. Это может, например, достигаться за счет того, что провода между сенсорным блоком и различными системами гальванически разделяются, чтобы эти системы оставались независимыми друг от друга.
Во втором режиме торможения может также продолжать эксплуатироваться первый блок управления торможением, при этом второй блок управления торможением подключается посредством блока переключений. При этом посредством второго блока управления торможением должно компенсироваться недостающее тормозное действие. В одном из предпочтительных вариантов осуществления изобретения, однако, предлагается, чтобы первый блок управления торможением во втором режиме торможения находился в неактивном состоянии. Благодаря этому могут устраняться нежелательные воздействия неправильного функционирования первого блока управления торможением. Блок переключений при этом целесообразным образом осуществляет переключение между двумя блоками управления торможением.
Повышенная надежность функционирования электродинамического тормоза может, кроме того, достигаться, когда первый блок контроля тормозного действия служит для контроля первого блока управления торможением, и когда по меньшей мере один второй блок контроля тормозного действия предусмотрен для контроля по меньшей мере второго блока управления торможением.
В этой связи предлагается, чтобы тормозная система рельсового транспортного средства имела другое тормозное устройство и переключающее устройство, при этом, в зависимости от показателя тормозного действия во втором режиме торможения, это другое тормозное устройство приводится в действие посредством переключающего устройства. Благодаря этому при неправильном функционировании второго блока управления торможением может обеспечиваться дополнительное тормозное действие посредством другого тормозного устройства.
В одном из конструктивно простых вариантов осуществления предлагается, чтобы это тормозное устройство было выполнено в виде стояночного тормоза.
Кроме того, можно предусмотреть альтернативные тормоза для реализации другого тормозного устройства, которые, в частности, имеют более высокую мощность, чем стояночный тормоз. Так, например, для получения достаточного тормозного действия могут применяться тормоза, которые отходят от генераторного принципа электродинамического тормоза и осуществляют свое тормозное действие посредством повышения давления в пневматических или гидравлических тормозных цилиндрах. Кроме того, в качестве дополнительного тормозного устройства может применяться магниторельсовый тормоз, который работает при пневматическом, гидравлическом и/или механическом приведении в действие исполнительного элемента в комбинации с создаваемым током магнитным полем. Кроме того, возможна тормозная система, основанная на принципе вихревого тока. Подключение или повышение тормозных действий посредством по меньшей мере одного дополнительного тормозного устройства может осуществляться до тех пор, пока не будут полностью подключены все имеющиеся тормоза.
В другом варианте осуществления изобретения предлагается, чтобы блоки управления торможением отличались друг от друга по своей конструктивной и/или алгоритмической реализации. Благодаря применению различных технологий для блоков управления торможением может достигаться особенно высокая надежность, так как может создаваться система с разнесенной редундантностью. Особенно предпочтительно может предотвращаться распространение специфической для определенной технологии возможной систематической ошибки от первого блока управления торможением на второй блок управления торможением или, соответственно, цепь других устройств управления торможением. Термин «конструктивный» относится предпочтительно к применяемым для блока управления торможением аппаратным средствам, а термин «алгоритмический» относится предпочтительно к реализации по меньшей мере одной функции управления блока управления торможением посредством программных средств. Различия в конструктивном исполнении и/или в алгоритмическом исполнении касаются предпочтительно функций блоков управления торможением, которые релевантны для настройки блока снабжения мощностью или, соответственно, его управляемых элементов. В этом предлагаемом варианте осуществления блоки управления торможением - при исполнении блока снабжения мощностью с переключающими или клапанными элементами - могут управлять переключающими или клапанными элементами по второй отличающейся стратегии переключения. При этом стратегия переключения первого блока управления торможением отлична от стратегии переключения второго блока управления торможением.
В отношении алгоритмического исполнения в этой связи предлагается, чтобы программные средства для реализации по меньшей мере одной функции управления во втором блоке управления торможением были реализованы иначе, чем в первом блоке управления торможением. Под «различной реализацией» может, в частности, пониматься, что программные средства первого блока управления торможением отличаются от программных средств второго блока управления торможением в отношении алгоритма и/или кода программирования. При этом предпочтительно, если программные средства первого и второго блоков управления торможением составляются посредством различных инструментов проектирования. Кроме того, предпочтительно, если программные средства устройств управления торможением разрабатываются разными лицами.
Относительно конструктивного исполнения, кроме того, предлагается, чтобы один из блоков управления торможением был выполнен в виде чисто аппаратного управления. Под этим в частности, должно пониматься, что релевантное для настройки блока снабжения мощностью аппаратное управление осуществляется без применения программных средств.
Для повышения надежности электродинамического тормоза в другом варианте осуществления изобретения предлагается, чтобы тормозная система рельсового транспортного средства имела тестовый режим, в котором тестируется блок переключений.
Кроме того, предлагается, чтобы тормозная система рельсового транспортного средства имела разъем для провода экстренного торможения транспортного средства, посредством которого может включаться экстренное торможение с помощью электродинамического тормоза. При том уровне надежности, который достижим при предлагаемом исполнении тормозной системы рельсового транспортного средства, в частности, при высокой редундантности блоков управления электродинамического тормоза, может получаться рельсовое транспортное средство, снабженное устройством экстренного торможения, при этом экстренное торможение может осуществляться исключительно посредством электродинамического тормоза с достаточным уровнем надежности. Благодаря этому можно обойтись без полноценного дополнительного фрикционного тормоза. Для более низких скоростей в качестве фрикционного тормоза может сохраняться только стояночный тормоз, например, в виде тормоза с пружинным приводом, который посредством пружинного привода препятствует скатыванию поставленного на стоянку транспортного средства с откоса. Тем самым может достигаться значительное сокращение штучных цен компонентов тормоза и веса рельсового транспортного средства.
В одном из предпочтительных усовершенствований изобретения предлагается, чтобы тормозная система рельсового транспортного средства включала в себя по меньшей мере один второй электродинамический тормоз, который включает в себя приводной агрегат, имеющий по меньшей мере один приводной двигатель и блок снабжения мощностью для снабжения приводного двигателя в тяговом режиме приводного агрегата, и по меньшей мере один блок регулирования торможения, который имеет соответствующий блок снабжения мощностью и по меньшей мере один блок управления торможением, который в первом режиме торможения управляет соответствующим блоком снабжения мощностью для обеспечения тормозного действия, при этом блоки управления торможением представляют собой по меньшей мере компоненты предусмотренного для второго тормоза устройства контроля торможения. Благодаря этому для второго тормоза может получаться устройство контроля торможения, которое независимо от блока регулирования торможения второго тормоза. При этом реализованные в устройстве контроля торможения процессы аналитической обработки и выбора решения выполняются блоками управления торможением другого тормоза, так что эти процессы независимы от процессов блока регулирования торможения второго тормоза. Благодаря независимости устройства контроля торможения второго тормоза от его блока регулирования торможения может достигаться предпочтительное разделение функций управления и функций контроля второго тормоза, при этом может достигаться высокая надежность в отношении распространения систематических ошибок от блока управления или, соответственно, регулирования к блоку контроля. Устройство контроля торможения для второго тормоза включает в себя также по меньшей мере два устройства контроля в виде блоков управления торможением, так что может достигаться предпочтительная разнесенная редундантность устройства контроля торможения.
Кроме того, предлагается, чтобы по меньшей мере блок регулирования торможения второго тормоза образовывал предусмотренное для первого тормоза устройство контроля торможения. При этом может достигаться предпочтительно двусторонний, в частности, перекрестный контроль электродинамических тормозов.
Один из примеров осуществления изобретения поясняется с помощью чертежей. Показано:
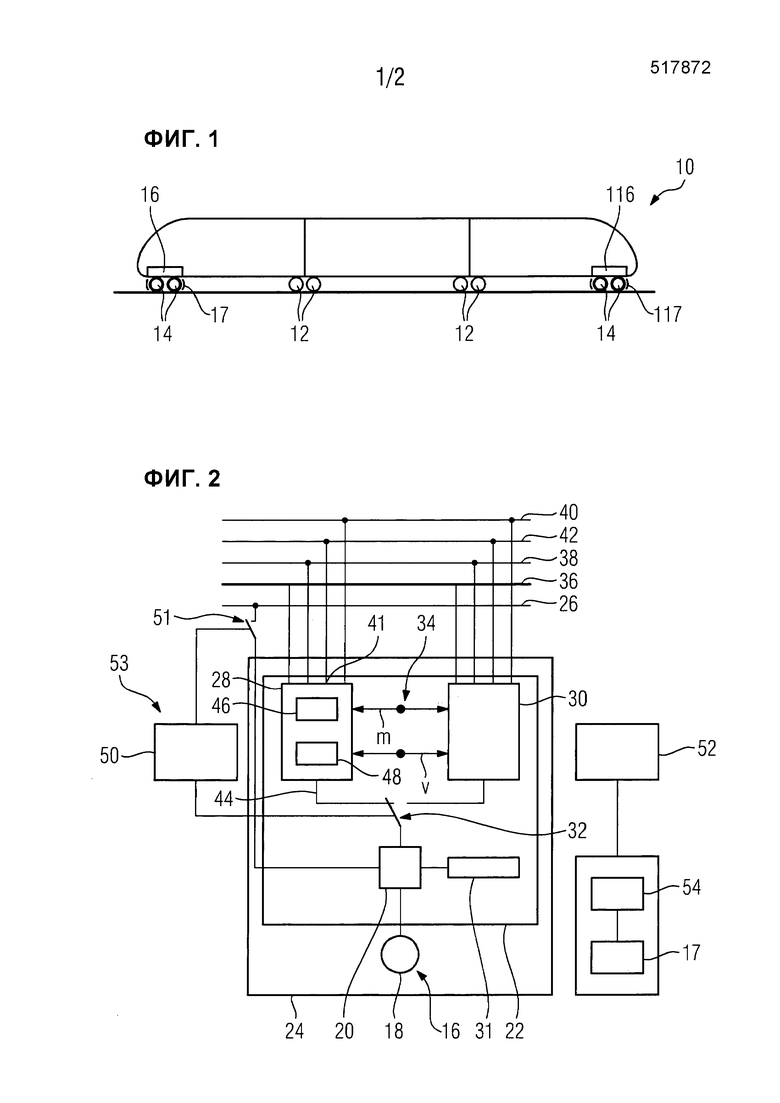
фиг. 1: рельсовое транспортное средство, имеющее ведущие оси и предусмотренные для них приводные агрегаты;
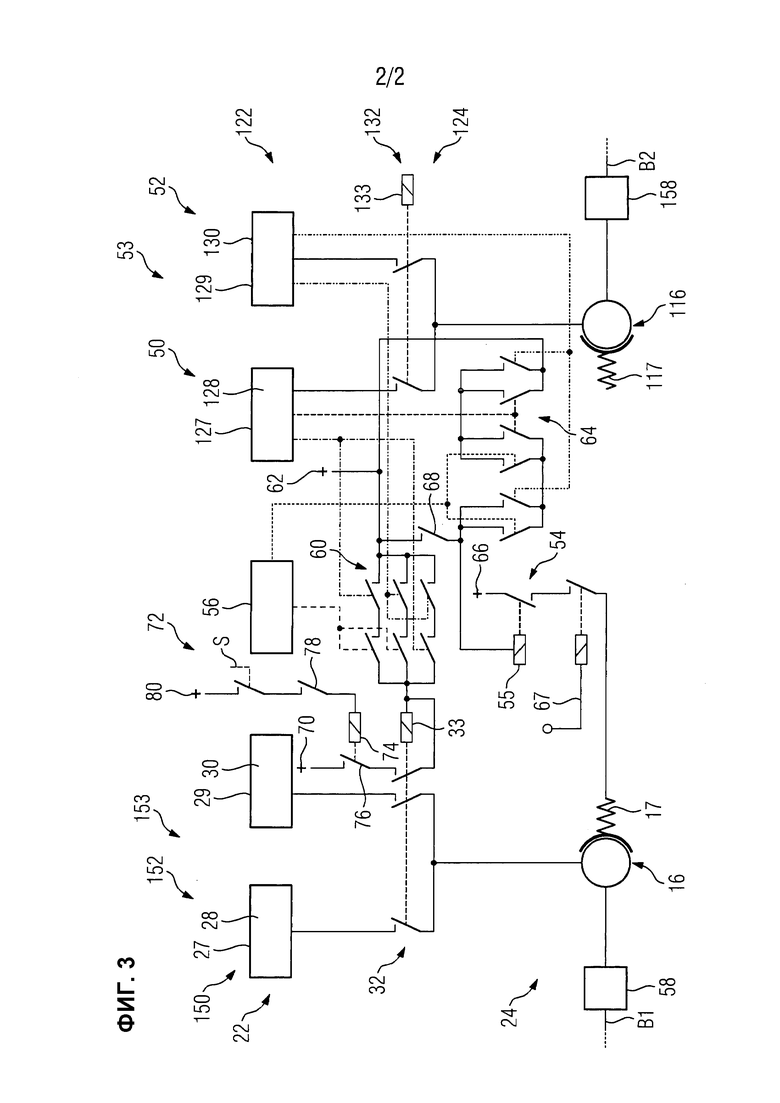
фиг. 2: схема управления для управления приводным агрегатом в режиме торможения, имеющая два различных блока управления торможением, и
фиг. 3: схема управления с фиг. 2 и другая схема управления, которая снабжена функцией контроля.
На фиг. 1 показано выполненное в виде тяговой единицы подвижного состава рельсовое транспортное средство 10 на сильно схематизированном виде сбоку. Оно имеет бегунковые оси 12 и ведущие оси 14, привод которых в тяговом режиме осуществляется посредством приводных агрегатов 16, 116. Процесс торможения рельсового транспортного средства 10 осуществляется посредством приводных агрегатов 16, 116, которые при этом имеют каждый функцию электродинамического тормоза. Для процессов торможения при низких скоростях в каждом случае предусмотрено другое тормозное устройство 17, 117, которое выполнено в виде схематично изображенного на фигуре стояночного тормоза, выполненного в виде тормоза с пружинным приводом.
Управление приводным агрегатом 16 как компонентом электродинамического тормоза поясняется подробнее с помощью фиг. 2. Приводной агрегат 16 имеет по меньшей мере один приводной двигатель 18, который может быть выполнен в виде трехфазной машины. Для снабжения приводного двигателя 18 электрической мощностью приводной агрегат 16 включает в себя также находящийся в активном соединении с приводным двигателем 18 блок 20 снабжения мощностью. В не показанном варианте осуществления приводной агрегат 16 может иметь несколько приводных двигателей, которые снабжаются от одного и того же блока 20 снабжения мощностью. Блок 20 снабжения мощностью известен из уровня техники и имеет не изображенный подробно инвертор, который в тяговом режиме приводного агрегата 16 посредством настройки электронных переключающих элементов, также называемых «клапанами», исходя от промежуточного контура постоянного напряжения, создает варьируемый по напряжению и частоте ток в соответствии с предоставляемой мощностью для приводного двигателя 18. Имеющаяся в распоряжении в промежуточном контуре постоянного напряжения энергия получается из высоковольтной сети снабжения 26, которая через другие, не изображенные электрические преобразующие устройства, такие как, в частности, трансформатор или преобразователь напряжения, выпрямитель и т.д. находится в активном соединении с сетью снабжения железной дороги. В тяговом режиме приводного агрегата 16 управление переключающими элементами инвертора осуществляется в соответствии со стратегией переключения, для создания посредством приводного двигателя 18 приводного момента на предусмотренных ведущих осях 14.
Приводной двигатель 18 вместе с блоком 22 управления торможением образует электродинамический тормоз 24. Блок 22 управления торможением включает в себя, наряду с блоком 20 снабжения мощностью, два блока 28 и 30 управления торможением, которые предусмотрены каждый для того, чтобы в активном состоянии управлять блоком 20 снабжения мощностью для процесса торможения посредством электродинамического тормоза 24. Блоки 28 и 30 управления торможением предусмотрены каждый для того, чтобы в режиме торможения приводного агрегата 16 управлять переключающими элементами инвертора блока 20 снабжения мощностью в соответствии со стратегией переключения таким образом, чтобы со стороны приводного двигателя 18 тормозной момент действовал на предусмотренную приводную ось 14. При процессе торможения посредством электродинамического тормоза 24 приводной двигатель 18 действует как генератор, при этом энергия, преобразуемая в процессе торможения в электрический ток, посредством тормозного реостата 31 преобразуется в тепло. Альтернативно или дополнительно эта энергия может запитываться обратно в высоковольтную сеть 26 снабжения, использоваться в транспортном средстве или аккумулироваться в мобильном аккумуляторе.
Первый блок 28 управления торможением через блок 32 переключений, функция которого поясняется ниже, находится в активном соединении с блоком 20 снабжения мощностью. Наряду с разъемом для блока 20 снабжения мощностью, блок 28 управления торможением имеет другие разъемы, посредством которых оно находится в активном соединении с сенсорным блоком 34. Сенсорный блок 34 служит для того, чтобы регистрировать показатель v скорости и показатель m массы, которые представляют собой входные сигналы для создания сигналов управления блоком 28 управления торможением. Через другие разъемы блок 28 управления торможением находится также в активном соединении с техникой управления рельсового транспортного средства, так как он соединен с шиной 36 данных рельсового транспортного средства 10, и с главным воздуховодом 38 рельсового транспортного средства. Через эти другие разъемы могут получаться другие входные параметры для блока 28 управления торможением, такие как, в частности, показатель, который представляет собой тормозное действие, задаваемое в случае рабочего торможения машинистом транспортного средства или автоматическим управлением транспортного средства. Блок 28 управления торможением посредством бортовой сети 40 снабжения снабжается электрической энергией и, кроме того, через разъем 41 находится в активном соединении с проводом 42 экстренного торможения транспортного средства, посредством которого может включаться экстренное торможение рельсового транспортного средства 10.
На основании вышеназванных входных параметров блок 28 управления торможением в первом режиме торможения, в котором он находится в активном состоянии, создает сигналы 44 управления, которые управляют блоком 20 снабжения мощностью соответственно определенному достигаемому тормозному действию, в частности, соответственно определенному достигаемому тормозному моменту. Для этого блок 28 управления торможением имеет по меньшей мере один вычислительный блок 46 и блок 48 памяти, в котором сохранены программные средства. В этих программных средствах, в частности, запрограммирована стратегия переключения режима торможения для переключающих элементов инвертора.
Для блока 28 управления торможением предусмотрен первый блок 50 контроля тормозного действия первого устройства 53 контроля торможения, которое предусмотрено для того, чтобы контролировать тормозное действие, достигнутое или достижимое посредством электродинамического тормоза 24. Для этого используется показатель тормозного действия, в частности, показатель тормозного момента, который сравнивается с номинальным значением. Показатель тормозного действия может, например, регистрироваться посредством сенсора ускорения и/или определяться посредством аналитической обработки показателя v скорости. Альтернативно или дополнительно показатель тормозного действия может определяться посредством контроля создаваемых блоком 28 управления торможением сигналов 44 управления. В качестве примера регистрация показателя тормозного действия, который обозначен ссылочным обозначением B1, схематично изображена на фиг. 3 в виде сенсорного блока 58 или, соответственно, 158.
Блок 22 регулирования торможения включает в себя, как уже упомянуто выше, второй блок 30 управления торможением. Он предусмотрен для того, чтобы выполнять по меньшей мере описанную выше для первого блока 28 управления торможением функцию управления для управления блоком 20 снабжения мощностью во втором режиме торможения приводного агрегата 16. Оно служит, в частности, для того, чтобы осуществлять управление блоком 20 снабжения мощностью при неправильном функционировании первого блока 28 управления торможением.
Если посредством первого блока 50 контроля тормозного действия распознается, что созданное или, соответственно, достижимое электродинамическим тормозом 24 тормозное действие недостаточно, блок 28 управления торможением считается неисправным, и в качестве восстанавливающего воздействия посредством блока 32 переключений осуществляется переключение во второй режим торможения электродинамического тормоза 24, в котором второй блок 30 управления торможением в его активном состоянии управляет блоком 20 снабжения мощностью для обеспечения тормозного действия. В этом втором режиме торможения первый, неисправный блок 28 управления торможением включается в неактивное состояние.
Для предотвращения привода во время работы второго блока 30 управления торможением во втором режиме торможения предпочтительно, если с переключением посредством блока 32 переключений происходит также отсоединение от высоковольтной сети 26 снабжения. Это осуществляется посредством сетевого разъединителя 51.
Для второго блока 30 управления торможением предусмотрен второй блок 52 контроля тормозного действия устройства 53 контроля торможения. Блоки 50, 52 контроля тормозного действия могут быть образованы физически отделенными друг от друга блоками, или они могут быть по меньшей мере частично образованы одной общей структурой. В частности, блоки 50, 52 контроля тормозного действия могут быть полностью образованы одной и той же структурой. Второй блок 52 контроля тормозного действия предусмотрен для того, чтобы посредством электродинамического тормоза 24 в его втором режиме торможения контролировать достигнутое или, соответственно, достижимое вторым блоком 30 управления торможением тормозное действие. Для этого, как уже описано выше, регистрируется или, соответственно, определяется показатель тормозного действия, в частности, показатель тормозного момента, и сравнивается с номинальным значением. Этот показатель тормозного действия может, в частности, соответствовать показателю B1 тормозного действия.
Если посредством второго блока 52 контроля тормозного действия распознается, что созданное или, соответственно, достижимое электродинамическим тормозом 24 тормозное действие недостаточно, блок 30 управления торможением считается неисправным, и в качестве восстанавливающего воздействия посредством управляемого вторым блоком 52 контроля тормозного действия переключающего устройства 54 приводится в действие другое тормозное устройство 17.
Блоки 28, 30 управления торможением основаны на различных технологиях. Под технологией понимается конструктивное, или аппаратное, и/или алгоритмическое, или программное, исполнение. В примерной конфигурации первый блок 28 управления торможением может быть выполнен в виде сигнального процессора (называемого также «SIP»), при этом алгоритмическая реализация может соответствовать регулированию с полевой ориентацией. Второй блок 30 управления торможением может быть выполнен в виде Field Programmable Gate Array (FPGA) или «программируемой пользователем вентильной матрицы», при этом алгоритмическая реализация может соответствовать регулированию с ориентацией на переключение.
По одному из альтернативных вариантов осуществления второй блок 30 управления торможением выполнен таким образом, что настройка блока 20 снабжения мощностью осуществляется исключительно посредством функциональности, реализованной с помощью аппаратных средств, без применения программных средств, в то время как первый блок 28 управления торможением основан на аппаратной и программной реализации функций управления.
Если оба блока 28, 30 управления торможением основаны на программной реализации по меньшей мере одной функции управления, соответствующие программные средства реализованы в блоках 28, 30 управления торможением различным образом. При этом отличаются, в частности, предусмотренные для выполнения функций управления коды программирования, так как эти коды, например, составляются разными лицами и/или с помощью разных инструментов.
Вследствие различных исполнений блоков 28, 30 управления торможением управление переключающими элементами инвертора блока 20 снабжения мощностью у первого блока 28 управления торможением осуществляется в соответствии с первой стратегией переключения, а у второго блока 30 управления торможением в соответствии со второй стратегией переключения, отличающейся от первой стратегии переключения.
Чтобы переключение с одного блока управления торможением на другой происходило надежно, предусмотренный для приводного агрегата 16 блок 32 переключений с регулярными и достаточно короткими интервалами обследуется на работоспособность. Например, при останове рельсового транспортного средства 10, например, во время оснащения или испытания тормозов, осуществляется настройка переключающих элементов инвертора по определенному тестовому образцу одним из блоков 28, 30 управления торможением. Для этого предусмотрен по меньшей мере один сенсорный блок, который, например, имеет преобразователь фазного тока и/или преобразователь напряжения промежуточного контура и который регистрирует воздействие настройки. После выполнения теста с первым блоком 28 управления торможением посредством блока 32 переключений второй блок 30 управления торможением включается в его активное состояние, и тест повторяется, предпочтительно по другой схеме тестирования. Если обнаруживается ожидаемая реализация данной схемы тестирования, блок 32 переключений считается исправным.
Приведенное выше описание находит применение также в отношении приводного агрегата 116, который является компонентом второго электродинамического тормоза 124 рельсового транспортного средства 10. Блок снабжения мощностью приводного агрегата 116 образует с блоками 128, 130 управления торможением блок 122 регулирования торможения, как изображено на фиг. 3. Блоки 22, 122 регулирования торможения рельсового транспортного средства 10, каждый со своими блоками управления торможением и своим блоком снабжения мощностью, рассчитаны на то, чтобы они во взаимодействии могли осуществлять экстренное торможение ведущих осей 14 рельсового транспортного средства 10 посредством предусмотренных для них приводных двигателей 18. Формулируя иначе, блоки 22, 122 регулирования торможения рассчитаны на то, чтобы во взаимодействии по меньшей мере на ведущих осях 14 создавать тормозной момент, необходимый для выполнения экстренного торможения.
Примерная реализация устройства 53 контроля торможения с его блоками 50, 52 контроля тормозного действия теперь описывается с помощью фиг. 3.
На фиг. 3 с левой стороны показан приводной агрегат 16, который, как описано выше, включает в себя по меньшей мере приводной двигатель 18 и блок 20 снабжения мощностью (см. фиг. 2). Кроме того, изображены блоки 28, 30 управления торможением, которые вместе с блоком 20 снабжения мощностью образуют блок 22 регулирования торможения. Блок 22 регулирования торможения вместе с приводным двигателем 18 образует электродинамический тормоз 24, который ниже называется «первым электродинамическим тормозом 24».
Блок 22 регулирования торможения имеет блок 32 переключений, которое для выполнения восстанавливающего воздействия первого тормоза 24 предусмотрен для того, чтобы осуществлять переключение между первым режимом торможения блока 22 регулирования торможения, в котором первый блок 28 управления торможением управляет блоком 20 снабжения мощностью для обеспечения тормозного действия, и вторым режимом торможения блока 22 регулирования торможения, в котором второй блок 30 управления торможением управляет блоком 20 снабжения мощностью для обеспечения тормозного действия. На фиг. 3 изображен исполнительный элемент 33 для приведения в действие блока 32 переключений.
Рельсовое транспортное средство 10 имеет, как также изображено на фиг. 1, другой приводной агрегат 116. Приводной агрегат 116, который, как и приводной агрегат 16, имеет по меньшей мере один приводной двигатель и блок снабжения мощностью, является компонентом электродинамического тормоза 124, который выполнен практически, в частности, совершенно идентично электродинамическому тормозу 24. Поэтому во избежание ненужных повторов ссылаемся на описание электродинамического тормоза 24, приведенное выше.
Электродинамический тормоз 124, который ниже называется «вторым электродинамическим тормозом 124», имеет приводной двигатель приводного агрегата 116 и блок 122 регулирования торможения. Он включает в себя блок снабжения мощностью приводного агрегата 116 и два блока 128, 130 управления торможением, которые предусмотрены каждый для того, чтобы в активном состоянии управлять этим блоком снабжения мощностью для процесса торможения электродинамического тормоза 124. Блок 122 регулирования торможения имеет блок 132 переключений, снабженный исполнительным элементом 133, который имеет такую же функцию, что и блок 32 переключений в первом электродинамическом тормозе 24: он предусмотрен для того, чтобы для выполнения соответствующего восстанавливающего воздействия осуществлять переключение между первым режимом торможения блока 122 регулирования торможения, в котором первый блок 128 управления торможением управляет блоком снабжения мощностью приводного агрегата 116 для обеспечения тормозного действия, и вторым режимом торможения блока 122 регулирования торможения, в котором второй блок 130 управления торможением управляет этим блоком снабжения мощностью для обеспечения тормозного действия.
Кроме того, изображены механическое тормозное устройство 17, которое предусмотрено для первого электродинамического тормоза 24, и другое, предусмотренное для электродинамического тормоза 124, механическое тормозное устройство 117.
Описанный выше с помощью фиг. 2 контроль первого электродинамического тормоза 24 осуществляется в рассматриваемом примере осуществления по меньшей мере посредством блока 122 регулирования торможения второго электродинамического тормоза 124. При этом предусмотренное для первого тормоза 24 устройство 53 контроля торможения образовано по меньшей мере блоком 122 регулирования торможения второго тормоза 124.
Изображенное на фиг. 2 устройство 53 контроля торможения образовано блоками 128, 130 управления торможением блока 122 регулирования торможения второго тормоза 124, а также другим, отдельным от них блоком 56 контроля.
Устройство 53 контроля торможения оснащено первой функцией контроля, в частности, запрограммировано, при которой это устройство 53 контроля торможения, наряду с описанными выше задачами управления блоками 128, 130 управления торможением для управления блоком снабжения мощностью приводного агрегата 116, выполнено в виде первого блока 50 контроля тормозного действия, который предусмотрен для того, чтобы контролировать первый тормоз 24 в его первом режиме торможения.
Эта функция контроля основана на описанной ниже задаче контроля, которая выполняется каждым из блоков 128, 130 управления торможением и блоком 56 контроля параллельно и практически, в частности совершенно независимо. Эти блоки находятся каждый в активном соединении с сенсорным блоком 58, который предусмотрен для регистрации или, соответственно, для определения первого показателя B1 тормозного действия для первого режима торможения первого электродинамического тормоза 24.
Показатель B1 тормозного действия может быть, в частности, показателем тормозного момента, при этом сенсорный блок 58, например, может быть механически соединен с осью 14, приводимой в движение приводным двигателем 18, и, например, выполнен в виде сенсора крутящего момента. Сенсорный блок 58 изображен схематично и может состоять из одного или нескольких сенсоров, при этом сенсорный блок 58 получает показатель B1 тормозного действия из одного или, соответственно, нескольких измеренных величин.
В другом варианте осуществления с помощью сенсорного блока 58 могут регистрироваться несколько показателей тормозного действия, которые отличаются друг от друга по своему виду и аналитически обрабатываются каждый различным блоком устройства 53 контроля торможения, как подробнее описано ниже.
Как уже описано выше, блоки 28, 30 управления торможением первого тормоза 24 основаны на различных технологиях. Это относится соответственно к блокам 128, 130 управления торможением. Под технологией понимается конструктивное, или аппаратное, и/или алгоритмическое, или программное, исполнение. В примерной конфигурации первый блок 128 управления торможением может быть выполнен в виде сигнального процессора (называемого также «SIP»), при этом алгоритмическая реализация может соответствовать регулированию с полевой ориентацией. Второй блок 130 управления торможением может быть выполнен в виде Field Programmable Gate Array (FPGA) или «программируемой пользователем вентильной матрицы», при этом алгоритмическая реализация может соответствовать регулированию с ориентацией на переключение.
По одному из альтернативных вариантов осуществления второй блок 130 управления торможением выполнен таким образом, что настройка блока снабжения мощностью приводного агрегата 116 осуществляется исключительно посредством функциональности, реализованной с помощью аппаратных средств, без применения программных средств, в то время как первый блок 128 управления торможением основан на аппаратной и программной реализации функций управления.
Если оба блока 128, 130 управления торможением основаны на программной реализации по меньшей мере одной функции управления, соответствующие программные средства реализованы в блоках 128, 130 управления торможением различным образом. При этом отличаются, в частности, предусмотренные для выполнения функций управления коды программирования, так как эти коды, например, составляются разными лицами и/или с помощью разных инструментов.
Вследствие этих различий, которые имеют место для функции управления блоками управления торможением в данном режиме торможения, каждый из блоков 128, 130 управления торможением может контролировать тормозное действие первого тормоза 24 в его первом режиме торможения всегда по индивидуальному методу, который отличается от методов другого блока управления торможением. Соответственно этому блоки 128, 130 управления торможением блока 122 регулирования торможения второго тормоза 124 по исполнению функций контроля соответствуют двум устройствам 127, 129 контроля устройства 53 контроля торможения, которые отличаются друг от друга описанными выше признаками. В частности, они отличаются друг от друга в отношении их конструктивного и/или алгоритмического исполнения. Когда они имеют каждый программные средства для исполнения функций контроля, эти программные средства реализованы различным образом.
Блок 56 контроля основан на технологии, которая отличается от технологий блоков 128, 130 управления торможением или, соответственно, устройств 127, 129 контроля. Например, блок 56 контроля может быть основан на технологии CPLD («Complex Proframmable Logic Device», сложное программируемое логическое устройство). Контроль создаваемого первым тормозом 24 тормозного действия может соответственно этому осуществляться по методу, который отличается от методов блоков 128, 130 управления торможением или, соответственно, устройств 127, 129 контроля.
Выполняемая каждым блоком 128, 130 управления торможением и блоком 56 контроля задача контроля заключается в том, чтобы на основе показателя B1 тормозного действия определять, достаточно ли тормозное действие, создаваемое первым тормозом 24 в его первом режиме торможения. Вследствие различных технологий в рассматриваемом примере осуществления механизм контроля, которым оснащены блоки 128, 130 управления торможением и блок 56 контроля для выполнения первой функции контроля, в каждом случае реализован иным образом или, соответственно, у каждого из этих блоков различен. В частности, различные механизмы контроля могут быть реализованы посредством различных программных средств контроля. Поэтому задача контроля решается в каждом случае посредством различного метода, т.е. посредством различной реализации этой задачи этими блоками практически по отдельности, в частности, совершенно по отдельности.
Как упомянуто выше, в одном из особых вариантов осуществления посредством сенсорного блока 58 могут регистрироваться несколько показателей тормозного действия, которые отличаются друг от друга по своему виду и аналитически обрабатываются каждый посредством различного блока устройства 53 контроля торможения. При этом вид показателей движения определяется технологией каждого блока устройства 53 контроля торможения.
Блоки 128, 130 управления торможением второго тормоза 124, т.е. устройства 127, 129 контроля и блок 56 контроля, предусмотрены каждый для того, чтобы при выполнении этой задачи контроля, в зависимости от первого показателя B1 тормозного действия, или, соответственно, от данного показателя тормозного действия, подавать сигнал о неисправности. Этот сигнал подается каждым из этих блоков, когда аналитическая обработка показателя B1 тормозного действия или, соответственно, данного показателя тормозного действия соответствующим блоком приводит к тому результату, что считается обнаруженным недостаточное тормозное действие первого тормоза 24 в его первом режиме торможения. Вследствие различной реализации задачи контроля в каждом из вышеназванных блоков может осуществляться практически независимая, в частности совершенно независимая подача сигнала о неисправности блоками устройства 53 контроля торможения.
Приведение в действие блока 32 переключений, как описано выше, осуществляется только тогда, когда подаются по меньшей мере два сигнала о неисправности. Для этого служит пусковое устройство 60, которое, как компонент первого устройства 53 контроля торможения, находится в активном соединении с выходом блоков 128, 130 управления торможением (или устройств 127, 129 контроля) и блока 56 контроля, с одной стороны, и с блоком 32 переключений, в частности с исполнительным элементом 33, с другой стороны. Пусковое устройство 60 (называемое также «селекторным» устройством) имеет три включенных параллельно друг другу провода, которые могут электрически соединяться с одним общим источником 62 напряжения и вместе с исполнительным элементом 33. В каждом проводе установлены по два выключателя, при этом выключатели во время выполнения задачи контроля блоками 128, 130 управления торможением и блоком 56 контроля, и соответственно этому в первом режиме торможения первого тормоза 24, находятся в разомкнутом положении. Благодаря этому электрическое соединение между источником 62 напряжения и исполнительным элементом 33 разомкнуто. Это электрическое соединение может создаваться при замыкании двух выключателей по меньшей мере в одном проводе, вследствие чего приводится в действие блок 32 переключений. Выключатели замыкаются каждый посредством сигнала о неисправности, который имеется на выходе блока устройства 53 контроля торможения. В каждом проводе выключатели всегда находятся в активном соединении с его различным блоком, так что замыкание двух выключателей в этом проводе и, таким образом, приведение в действие блока 32 переключений может осуществляться только тогда, когда сигнал о неисправности подается двумя различными блоками устройства 53 контроля торможения.
Задача контроля, а именно, индивидуальная аналитическая обработка показателя B1 тормозного действия или, соответственно, данного показателя тормозного действия блоками 128, 130 контроля торможения и блоком 56 контроля, выполняется, как описано выше, этими блоками практически независимо друг от друга. Функция контроля включает в себя эту задачу контроля и выполняется с приведением в действие блока 32 переключений посредством взаимодействия блоков устройства 53 контроля торможения, т.е. устройств 127, 129 контроля и блока 56 контроля, в частности, посредством комбинирования результатов индивидуальных задач контроля.
С приведением в действие блока 32 переключений при недостаточном тормозном действии первого электродинамического тормоза 24 в его первом режиме торможения предпринимается восстанавливающее воздействие, которое соответствует описанному выше осуществлению управления блоком 20 снабжения мощностью вторым блоком 30 управления торможением.
Устройство 53 контроля торможения оснащено второй функцией контроля, в частности, запрограммировано, при которой оно, наряду с описанными выше задачами управления блоками 128, 130 управления торможением для управления блоком снабжения мощностью приводного агрегата 116, выполнено в виде второго блока 52 контроля тормозного действия (см. фиг. 2), который предусмотрен для того, чтобы контролировать первый тормоз 24 в его втором режиме торможения.
Эта вторая функция контроля основана на задаче контроля, которая выполняется каждым из блоков 128, 130 управления торможением и блоком 56 контроля практически отдельно и идентична задаче контроля первой функции контроля. Вторая функция контроля отличается от первой функции контроля применением дополнительного пускового устройства 64, которое, как компонент устройства 53 контроля торможения, находится в активном соединении с выходом блоков 128, 130 управления торможением или, соответственно, блока 56 контроля, с одной стороны, и с блоком 54 переключений (см. также фиг. 2), в частности с его исполнительным элементом 55. Пусковое устройство 64 (называемое также «селекторным» устройством) имеет три включенных последовательно пары параллельных проводов, которые могут электрически соединяться с общим источником 62 напряжения и вместе с исполнительным элементом 55. Для каждой пары проводов в двух проводах установлено по выключателю, при этом выключатели во время выполнения задачи контроля блоками 128, 130 управления торможением и блоком 56 контроля, и соответственно этому во время второго режима торможения первого тормоза 24, находятся в замкнутом положении. Благодаря этому создано электрическое соединение между источником 62 напряжения и исполнительным элементом 55. Это электрическое соединение может прерываться при размыкании двух выключателей по меньшей мере в одной паре проводов, вследствие чего приводится в действие блок 54 переключений.
Выключатели размыкаются каждый посредством сигнала о неисправности, который имеется на выходе блока устройства 53 контроля торможения. В каждой паре проводов выключатели всегда находятся в активном соединении с различным блоком, так что размыкание двух выключателей в этой паре проводов и, таким образом, приведение в действие переключающего устройства 54, может осуществляться только тогда, когда сигнал о неисправности подается двумя различными блоками устройства 53 контроля торможения.
Во время второго режима торможения первого тормоза 24 блок 54 переключений находится в замкнутом положении, благодаря чему создано электрическое соединение между источником 66 напряжения и тормозным устройством 17. При этом подается сигнал «отключение тормозного устройства 17». Когда приводится в действие блок 54 переключений, это электрическое соединение размыкается, вследствие чего создается сигнал «включение тормозного устройства 17».
На фигуре, кроме того, изображен провод 67 управления, с помощью которого тормозное устройство 17 в любое время может приводиться в действие посредством команды машиниста транспортного средства.
Задача контроля, а именно, индивидуальная аналитическая обработка показателя B1 тормозного действия или, соответственно, данного показателя тормозного действия блоками 128, 130 контроля торможения, а также блоком 56 контроля, как описано выше, выполняется этими блоками практически независимо друг от друга. Функция контроля включает в себя эту задачу контроля и выполняется с приведением в действие блока 54 переключений посредством взаимодействия этих блоков, в частности, посредством комбинирования результатов индивидуальных задач контроля.
С приведением в действие блока 54 переключений при недостаточном тормозном действии первого электродинамического тормоза 24 в его втором режиме торможения предпринимается восстанавливающее воздействие, которое соответствует описанному выше приведению с действие механического тормоза 17. Второй режим торможения должен продолжать действовать, пока не закончится процесс торможения.
При осуществлении первого режима торможения, при котором первая функция контроля может выполняться посредством пускового устройства 60, предусмотренное для второй функции контроля пусковое устройство 64 неактивно, так как создано постоянное, независимое от конфигурации пускового устройства 64 электрическое соединение между источником 62 напряжения и исполнительным элементом 55. Это электрическое соединение при переходе во второй режим торможения прерывается выключателем 68, который при приведении в действие блока 32 переключений размыкается исполнительным элементом 33. Тогда электрическое соединение продолжает существовать только лишь через пусковое устройство 64, которое, таким образом, приводится в активное состояние.
При осуществлении второго режима торможения, при котором вторая функция контроля может осуществляться посредством пускового устройства 64, предусмотренное для первой функции контроля пусковое устройство 60 неактивно, так как создано постоянное, независимое от конфигурации пускового устройства 60 электрическое соединение между источником 70 напряжения и исполнительным элементом 33. Для блока 32 переключений, кроме того, предусмотрено возвратное устройство 72, которое служит для того, чтобы снова приводить в действие первый блок 28 управления торможением по окончании второго режима торможения или, соответственно, по окончании процесса торможения посредством тормозного устройства 17. Это осуществляется посредством сигнала S, который приводит в действие исполнительный элемент 74, посредством которого выключатель 76 размыкает электрическое соединение исполнительного элемента 33 с источником 70 напряжения. При этом размыкании происходит активирование исполнительного элемента 33, который выполняет следующие процессы переключения: блок 32 переключений возвращается в исходное состояние, так что блок 28 управления торможением снова приводится в активное соединение с блоком 20 снабжения мощностью, выключатель 68 приводится в действие, так что создается электрическое соединение источника 62 напряжения с исполнительным элементом 55 и при этом деактивируется пусковое устройство 64; выключатель 78 размыкает электрическое соединение между источником 80 напряжения и исполнительным элементом 74, так что возвратное устройство 72 деактивируется или, соответственно, не может осуществляться приведение в действие выключателя 76 с помощью исполнительного элемента 74 посредством сигнала S. Приведение в действие выключателя 78 для активирования возвратного устройства 72 предполагает окончание того состояния, которое привело к срабатыванию контроля.
Первая и вторая функции контроля, которые выполняются устройством 53 контроля торможения, относятся к первому режиму контроля тормозного устройства рельсового транспортного средства 10, в котором контролируется первый тормоз 24. При этом контролирующую роль для оказания одного из описанных выше восстанавливающих воздействий, касающихся первого тормоза 24, берет на себя второй тормоз 124, в частности, его блок 122 регулирования торможения.
Тормозная система рельсового транспортного средства 10 предусмотрена со вторым режимом контроля, в котором контролируется второй тормоз 124. В рассматриваемом примере осуществления контролирующую роль для оказания одного из описанных выше восстанавливающих воздействий, касающихся второго тормоза 124, берет на себя первый тормоз 24, в частности, его блок 22 регулирования торможения. Блок 22 регулирования торможения первого тормоза 24 образует вместе с блоком 56 контроля второе устройство 153 контроля торможения, которое предусмотрено для того, чтобы учитывать показатель B2 тормозного действия для оказания восстанавливающего воздействия, касающегося второго тормоза 124. Устройство 153 контроля торможения, как и устройство 53 контроля торможения, оснащено двумя функциями контроля, которые предусмотрены каждая для контроля второго тормоза 124 при осуществлении его первого режима торможения или, соответственно, второго режима торможения. Блоки 28, 30 управления торможением при выполнении функций контроля выполнены в виде устройств 27, 29 контроля устройства 153 управления торможением. При выполнении первой функции контроля и второй функции контроля устройство 153 контроля торможения выполнено в виде блока 150 или, соответственно, 152 контроля тормозного действия для первого или, соответственно, второго режима торможения блока 122 регулирования торможения второго тормоза 124. Этот контроль осуществляется независимо от второго показателя B2 тормозного действия или от нескольких, отличающихся друг от друга по своему виду показателей тормозного действия, регистрируемого или, соответственно, регистрируемых сенсорным блоком 158. Приведенное выше описание сенсорного блока 58 относится соответственно к сенсорному блоку 158.
В одном из особых вариантов осуществления сенсорные блоки 58 и 158 в отношении аппаратных средств могут быть по меньшей мере частично образованы одной и той же сенсорной структурой.
В целях наглядности на фиг. 3 изображен только контроль первого тормоза 24 вторым тормозом 124. Приведенное выше описание выполняемых устройством 53 контроля торможения функций контроля находит соответствующее применение для первого тормоза 24 в отношении контроля второго тормоза 124. При этом соответствующие функции контроля выполняются блоками 28, 30 управления торможением при их функционировании в качестве устройств 27, 29 контроля во взаимодействии с блоком 56 контроля.
Блок 56 контроля в рассматриваемом примере осуществления представляет собой общий компонент первого устройства 53 контроля торможения и второго устройства 153 контроля торможения.
Выполнение функций контроля в блоках 28, 30, 128, 130 контроля торможения при их функционировании в качестве устройств 27, 29, 127, 129 контроля может осуществляться в каждом случае посредством вычислительного блока, который выполнен идентично или отлично от вычислительного блока, предусмотренного для осуществления режима торможения.
С помощью разъема для провода 42 экстренного торможения транспортного средства может включаться экстренное торможение посредством электродинамических тормозов 24, 124. При том уровне надежности, который достижим при предлагаемом исполнении тормозной системы рельсового транспортного средства, в частности, при исполнении блоков регулирования торможения по меньшей мере с двумя блоками управления торможением, может получаться рельсовое транспортное средство, снабженное устройством экстренного торможения, при этом экстренное торможение может осуществляться исключительно посредством электродинамических тормозов с достаточным уровнем надежности. Благодаря этому можно предпочтительно обойтись без полноценного дополнительного фрикционного тормоза. Для более низких скоростей в качестве фрикционного тормоза может сохраняться только стояночный тормоз, например, в виде тормоза с пружинным приводом, который посредством создаваемой пружинным приводом силы трения препятствует скатыванию поставленного на стоянку транспортного средства с откоса. Тем самым может достигаться значительное сокращение цен компонентов тормоза и веса рельсового транспортного средства.
В показанном на фиг. 3 примере осуществления приводные агрегаты 16 и 116 могут быть предусмотрены для одной и той же тележки рельсового транспортного средства 10 или отдельных тележек. В показанном на фиг. 1 варианте осуществления приводные агрегаты 16, 116 предусмотрены каждый для различной тележки. При этом привод каждой из ведущих осей 14 одной и той же тележки осуществляется собственным приводным двигателем, при этом оба приводных двигателя снабжаются одним и тем же блоком снабжения мощностью. Кроме того, у показанной на фиг. 3 тормозной системы в этом варианте осуществления электродинамические тормоза 24, 124 предусмотрены каждый для различных тележек и, таким образом, для нескольких ведущих осей. Соответственно этому с помощью устройств 53, 153 контроля торможения может достигаться локализация потери тормозного действия для каждой тележки, и восстанавливающее воздействие в отношении каждой тележки может производиться дифференцированно.
В одном из альтернативных вариантов осуществления для каждой приводной оси тележки предусмотрен приводной двигатель, при этом для каждого приводного двигателя этой тележки предусмотрено по одному различному блоку снабжения мощностью. Соответственно этому, в этом варианте осуществления для каждой приводной оси тележки предусмотрено по одному отдельному электродинамическому тормозу. Кроме того, у показанной на фиг. 3 тормозной системы в этом варианте осуществления электродинамические тормоза 24, 124 предусмотрены для одной и той же тележки или, соответственно, каждый для различной ведущей оси в этой тележке. Соответственно этому, с помощью устройств 53, 153 контроля торможения может достигаться локализация потери тормозного действия для каждой оси, и восстанавливающее воздействие в отношении каждой ведущей оси может производиться дифференцированно.
Группа изобретений относится к электродинамическим тормозным системам для транспортных средств. Тормозная система рельсового транспортного средства содержит по меньшей мере один первый электродинамический тормоз (24), который включает в себя приводной агрегат (16), имеющий приводной двигатель (18) и блок (20) снабжения мощностью приводного двигателя (18) в тяговом режиме. Также тормозная система содержит два блока (28; 30) управления торможением. Причем в первом режиме торможения первый блок (28) торможения управляет блоком (20) снабжения мощностью для обеспечения тормозного действия. Первый блок (50) контроля тормозного действия и блок (32) переключений, в зависимости от показателя тормозного действия в первом режиме торможения, осуществляют переключение во второй режим. Во втором режиме торможения второй блок (30) торможения управляет блоком (20) снабжения мощностью. Вторым объектом является способ торможения рельсового транспортного средства. Технический результат изобретений заключается в повышении надежности электродинамического тормоза. 2 н. и 12 з.п. ф-лы, 3 ил.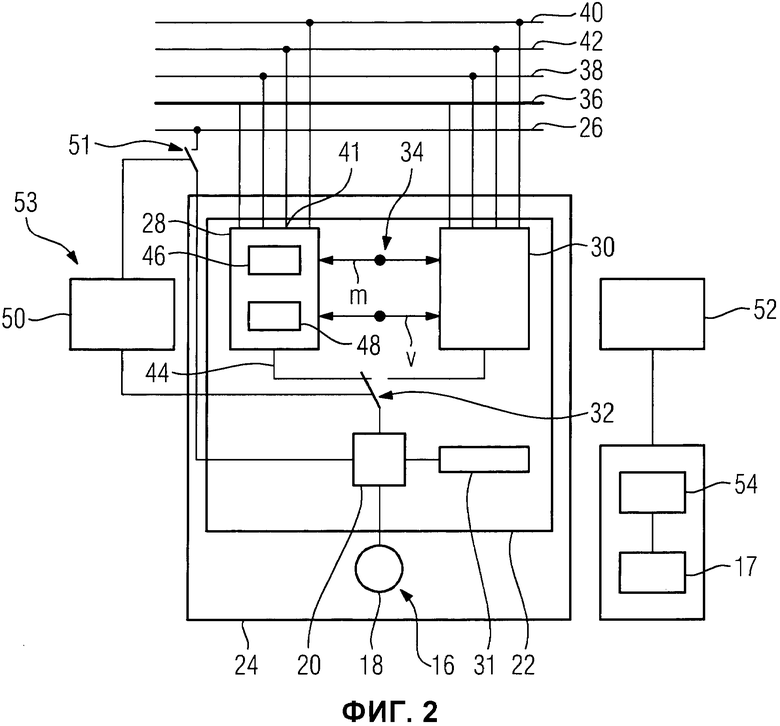
1. Тормозная система рельсового транспортного средства, имеющая по меньшей мере один электродинамический тормоз (24), который включает в себя приводной агрегат (16), имеющий по меньшей мере один приводной двигатель (18) и блок (20) снабжения мощностью для снабжения приводного двигателя (18) в тяговом режиме приводного агрегата (16),
отличающаяся
по меньшей мере двумя блоками (28, 30) управления торможением, причем в первом режиме торможения первый блок (28) управления торможением в активном состоянии управляет блоком (20) снабжения мощностью для обеспечения тормозного действия; первый блок (50) контроля тормозного действия и блок (32) переключений, который служит для того, чтобы, в зависимости от показателя тормозного действия в первом режиме торможения, осуществлять переключение во второй режим торможения, в котором второй блок (30) управления торможением в активном состоянии управляет блоком (20) снабжения мощностью для обеспечения тормозного действия.
2. Тормозная система рельсового транспортного средства по п. 1, отличающаяся тем, что первый блок (28) управления торможением во втором режиме торможения находится в неактивном состоянии.
3. Тормозная система рельсового транспортного средства по п. 1 или 2, отличающаяся тем, что первый блок (50) контроля тормозного действия служит для контроля первого блока (28) управления торможением и что по меньшей мере один второй блок (52) контроля тормозного действия предусмотрен для контроля по меньшей мере второго блока (30) управления торможением.
4. Тормозная система рельсового транспортного средства по п. 3, отличающаяся другим тормозным устройством (17) и переключающим устройством (54), при этом, в зависимости от показателя тормозного действия во втором режиме торможения, это другое тормозное устройство (17) приводится в действие посредством переключающего устройства (54).
5. Тормозная система рельсового транспортного средства по п. 4, отличающаяся тем, что тормозное устройство (17) выполнено в виде стояночного тормоза.
6. Тормозная система рельсового транспортного средства по п. 1, отличающаяся тем, что блоки (28, 30) управления торможением отличаются друг от друга по своему конструктивному и/или алгоритмическому исполнению.
7. Тормозная система рельсового транспортного средства по п. 6, отличающаяся тем, что программные средства для выполнения по меньшей мере одной функции управления во втором блоке (30) управления торможением реализованы иначе, чем в первом блоке (28) управления торможением.
8. Тормозная система рельсового транспортного средства по п. 6, отличающаяся тем, что один из блоков управления торможением выполнен в виде чисто аппаратного управления.
9. Тормозная система рельсового транспортного средства по п. 1, отличающаяся тестовым режимом, в котором тестируется блок (32) переключений.
10. Тормозная система рельсового транспортного средства по п. 1, отличающаяся разъемом (41) для провода (42) экстренного торможения транспортного средства, посредством которого может включаться экстренное торможение с помощью электродинамического тормоза (24).
11. Тормозная система рельсового транспортного средства по п. 1, отличающаяся по меньшей мере одним вторым электродинамическим тормозом (124), который включает в себя приводной агрегат (116), имеющий по меньшей мере один приводной двигатель и блок снабжения мощностью для снабжения приводного двигателя в тяговом режиме приводного агрегата (116), и по меньшей мере один блок (122) регулирования торможения, который имеет соответствующий блок снабжения мощностью и по меньшей мере один блок (128, 130) управления торможением, который в первом режиме торможения управляет соответствующим блоком снабжения мощностью для обеспечения тормозного действия, при этом блоки (28, 30) управления торможением представляют собой по меньшей мере компоненты предусмотренного для второго тормоза (124) устройства (153) контроля торможения.
12. Тормозная система рельсового транспортного средства по п. 11, отличающаяся тем, что по меньшей мере блок (122) регулирования торможения второго тормоза (124) образует предусмотренное для первого тормоза (24) устройство (53) контроля торможения.
13. Способ торможения рельсового транспортного средства (10) посредством электродинамического тормоза (24), который включает в себя приводной агрегат (16), имеющий по меньшей мере один приводной двигатель (18) и блок (20) снабжения мощностью для снабжения приводного двигателя (18) в тяговом режиме приводного агрегата (16), при котором
- в первом режиме торможения управление блоком (20) снабжения мощностью для обеспечения тормозного действия осуществляют первым блоком (28) управления торможением;
- в первом режиме торможения регистрируют показатель тормозного действия;
- в зависимости от показателя тормозного действия, осуществляют переключение во второй режим торможения, в котором второй блок (30) управления торможением управляет блоком (20) снабжения мощностью для обеспечения тормозного действия.
14. Способ по п. 13, отличающийся тем, что
- во втором режиме торможения регистрируется показатель тормозного действия;
- в зависимости от показателя тормозного действия во втором режиме торможения, посредством переключающего устройства (54) приводится в действие другое тормозное устройство (17).
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ С ЭЛЕКТРОПРИВОДОМ (ВАРИАНТЫ) | 2000 |
|
RU2192974C2 |
| Агрегат непрерывного действия для посола измельченного мяса | 1958 |
|
SU116413A1 |
| US 2009125170 A, 14.05.2009 | |||
| DE 102006043892 A1, 27.03.2008 | |||
| Устройство для электрического торможения электроподвижного состава постоянного тока | 1977 |
|
SU709416A1 |

