Изобретение относится к области исследования материалов с помощью технических средств, а именно, к неразрушающему контролю материалов и изделий активным тепловым методом и может быть использовано для сплошного автоматизированного контроля подповерхностных дефектов в крупногабаритных плоских изделиях, выполненных из композиционных материалов и сотовых структур, относящихся к авиационной, ракетной и космической отраслям промышленности.
Известно устройство для активного теплового контроля крупногабаритных цилиндрических изделий [RU 2697437 С1, МПК G01N 25/72 (2006.01), опубл. 14.08.2019], содержащее устройство вращения объекта контроля, тепловизор и источник нагрева, подключенные к компьютеру. Тепловизор и источник нагрева закреплены на роботизированном манипуляторе, подключенном к компьютеру, и расположены с наружной стороны объекта контроля. Роботизированный манипулятор установлен на линейных направляющих, параллельно которым на роликах размещен объект контроля, к одному ролику подключен электрический привод, соединенный с блоком управления вращением. Источник нагрева содержит корпус-отражатель, в котором установлен трубчатый электрический нагреватель, соединенный с блоком управления нагревом. К корпусу-отражателю жестко прикреплен один конец первой штанги, к другому концу которой с помощью подвижного шарнира присоединен конец второй штанги, на другом конце которой закреплен тепловизор. К компьютеру подключены блок управления нагревом, блок управления вращением и датчик положения, расположенный вблизи поверхности контролируемого изделия.
Перемещение источника нагрева и тепловизора вдоль поверхности плоских крупногабаритных объектов контроля с использованием роботизированного манипулятора является технически сложной и экономически затратной процедурой.
Наиболее близким к заявляемому изобретению является устройство тепловизионного контроля крупногабаритных плоских объектов [Wheeled robot dedicated to the evaluation of the technical condition of large-dimension engineering structures. J. Domin,  R. Bialecki, J. Zajac, K. Grzyb, P. Kielan, W. Adamczyk, Z. Ostrowski, P. Wienchol, K. Lamkowski, J. Kaminski, M. Doledutko, R. Rosiek. Robotics. 2020. 9(2). 28. https://doi.org/10.3390/robotics9020028, Figure 19-21], содержащее несущий корпус, к углам нижней части которого прикреплены четыре приводных системы. В корпусе каждой приводной системы установлен оснащенный энкодером электрический двигатель, на вал которого посажена ведущая коническая шестерня, соединенная в редукторе с ведомой конической шестерней, на вал которой посажено колесо Илона. Электрические двигатели подключены к микропроцессору управления. Снизу к несущему корпусу прикреплен секционный корпус-отражатель, в каждой секции которого установлен трубчатый оптический галогенный нагреватель, излучение которого направлено на поверхность объекта контроля. Трубчатые оптические галогенные нагреватели через твердотельное реле подключены к микропроцессору управления. Сзади к несущему корпусу прикреплен кронштейн, на котором установлен тепловизор, так, что поле его зрения направлено на часть поверхности объекта контроля, расположенной за несущим корпусом. На верхней поверхности несущего корпуса установлен лазерный сканирующий измеритель расстояния с углом обзора в 360°, подключенный к микропроцессору управления. Тепловизор и микропроцессор управления подключены к микрокомпьютеру, соединенному по беспроводной связи с компьютером. Микропроцессор управления и микрокомпьютер расположены внутри несущего корпуса.
R. Bialecki, J. Zajac, K. Grzyb, P. Kielan, W. Adamczyk, Z. Ostrowski, P. Wienchol, K. Lamkowski, J. Kaminski, M. Doledutko, R. Rosiek. Robotics. 2020. 9(2). 28. https://doi.org/10.3390/robotics9020028, Figure 19-21], содержащее несущий корпус, к углам нижней части которого прикреплены четыре приводных системы. В корпусе каждой приводной системы установлен оснащенный энкодером электрический двигатель, на вал которого посажена ведущая коническая шестерня, соединенная в редукторе с ведомой конической шестерней, на вал которой посажено колесо Илона. Электрические двигатели подключены к микропроцессору управления. Снизу к несущему корпусу прикреплен секционный корпус-отражатель, в каждой секции которого установлен трубчатый оптический галогенный нагреватель, излучение которого направлено на поверхность объекта контроля. Трубчатые оптические галогенные нагреватели через твердотельное реле подключены к микропроцессору управления. Сзади к несущему корпусу прикреплен кронштейн, на котором установлен тепловизор, так, что поле его зрения направлено на часть поверхности объекта контроля, расположенной за несущим корпусом. На верхней поверхности несущего корпуса установлен лазерный сканирующий измеритель расстояния с углом обзора в 360°, подключенный к микропроцессору управления. Тепловизор и микропроцессор управления подключены к микрокомпьютеру, соединенному по беспроводной связи с компьютером. Микропроцессор управления и микрокомпьютер расположены внутри несущего корпуса.
Однако, расположение тепловизора снаружи несущего корпуса снижает достоверность результатов контроля за счет негативного влияния помех, вызванных тепловым излучением окружающих предметов. Использование колес Илона обеспечивает малую площадь контакта с поверхностью объекта контроля, что приводит к «сползанию» устройства в процессе контроля объекта, расположенного даже под небольшим углом к горизонту. Оборудование каждого колеса Илона электродвигателем и редуктором сложно с технической точки зрения. Использование только тепловизора в качестве инструмента контроля повышает вероятность обнаружения ложных дефектов, а также вероятность пропуска истинных дефектов, что связанно с трудностью интерпретации температурных сигналов, зависящих от равномерности коэффициента поглощения, технологических выступов и посторонних предметов, в том числе, от загрязнения поверхности объекта контроля.
Техническим результатом предложенного изобретения является создание сканирующего тепловизионного дефектоскопа, обеспечивающего неразрушающий автоматизированный контроль подповерхностных дефектов в крупногабаритных плоских изделиях с высокой производительностью и достоверностью.
Сканирующий тепловизионный дефектоскоп, так же как в прототипе, содержит два электродвигателя, два ведущих колеса, корпус-отражатель, формирующий поток излучения, установленного в нем трубчатого оптического галогенного источника нагрева, на поверхность объекта контроля, тепловизор, поле зрения которого направлено на поверхность объекта контроля, лазерный сканирующий измеритель расстояния с углом обзора в 360° и компьютер.
Согласно изобретению, в качестве электродвигателей использованы шаговые двигатели, которые прикреплены к внутренней поверхности поперечины, соединяющей два лонжерона несущей П-образной рамы в ее передней части. На валах шаговых двигателей, пропущенных через отверстия в лонжеронах, закреплены ведущие колеса. На внешней стороне каждого из лонжеронов на равном расстоянии от ведущего колеса и друг от друга закреплены валы, на которые с помощью подшипников посажены натяжные ролики и ведомое колесо. Ведущие и ведомые колеса равных размеров снабжены выступами на их образующей и расположены на разных концах лонжеронов, причем на каждую пару ведущего и ведомого колес с натягом надет замкнутый армированный ремень, имеющий на его внутренней поверхности впадины так, что натяжные ролики, размещенные между ними, касаются внутренней поверхности ремня, внешняя поверхность которого соприкасается с поверхностью объекта контроля. К поперечине П-образной рамы прикреплен контроллер управления, к которому подключены шаговые двигатели. Сверху на лонжеронах закреплен кожух в виде усеченной пирамиды, на верхней поверхности которой установлен лазерный сканирующий измеритель расстояния. Внутри кожуха параллельно его верхней поверхности установлены направляющие, на которых закреплена оптическая камера, поле зрения которой направлено на поверхность объекта контроля. На направляющих с возможностью продольного перемещения по ним установлен тепловизор, поле зрения которого направлено вертикально вниз на поверхность объекта контроля. На внутренней боковой поверхности кожуха закреплен источник светодиодной подсветки, который соединен с контроллером управления. К поперечине П-образной рамы с помощью выступающих вперед кронштейнов прикреплен корпус-отражатель, внутри которого установлен трубчатый галогенный источник нагрева. На корпусе-отражателе закреплены вентиляторы принудительного охлаждения и блок управления нагревом, соединенные между собой. Тепловизор, оптическая камера, лазерный сканирующий измеритель расстояния, контроллер управления и блок управления нагревом соединены с компьютером.
Предложенное расположение тепловизора внутри кожуха обеспечивает низкий уровень температурных шумов, связанных с излучением окружающих предметов. Использование оптической камеры, а также источника светодиодной подсветки зоны контроля, работающего на длине волны вне спектрального диапазона тепловизора, не приводит к образованию температурных помех, а обеспечивает повышение достоверности результатов контроля.
Предложенная конструкция обеспечивает плавность хода и маневренность передвижения дефектоскопа, а также достаточный контакт с контролируемой поверхностью, необходимый для исключения его «сползания» с объекта контроля, расположенного под небольшим углом к горизонту. Шаговые двигатели позволяют регулировать скорость перемещения дефектоскопа, что обеспечивает выявление дефектов, расположенных на различных глубинах от поверхности объекта контроля. Расположение тепловизора на направляющих внутри кожуха позволяет устанавливать требуемое расстояние от края полосы нагрева поверхности объекта контроля до края зоны наблюдения тепловизором. Такая регулировка является дополнительной к регулировке скорости перемещения дефектоскопа и позволяет выявлять дефекты, расположенные на различных глубинах и создающие температурные сигналы в различные моменты времени после начала нагрева. Это повышает качество неразрушающего контроля. Использование оптической камеры обеспечивает верификацию выявленных тепловизором тепловых аномалий, которые могут быть связаны с конструктивными и излучательными особенностями объекта контроля, а не с наличием внутренних дефектов.
Предложенное устройство позволяет проводить непрерывное сканирование, что обеспечивает высокую производительность тепловизионного контроля плоских объектов, например, крупногабаритных пластин из угле- и стеклопластиков, а также сотовых структур.
В процессе контроля дефектоскоп обеспечивает непрерывную запись термограмм, что облегчает процедуру «сшивки» результатов сканирующего тепловизионного контроля, а также обеспечивает равномерность температурного поля «сшитой» панорамной термограммы всей проконтролированной поверхности объекта контроля. Одновременное использование тепловизора и оптической камеры позволяет повысить качество контроля внутренних дефектов за счет исключения регистрации ложных дефектов.
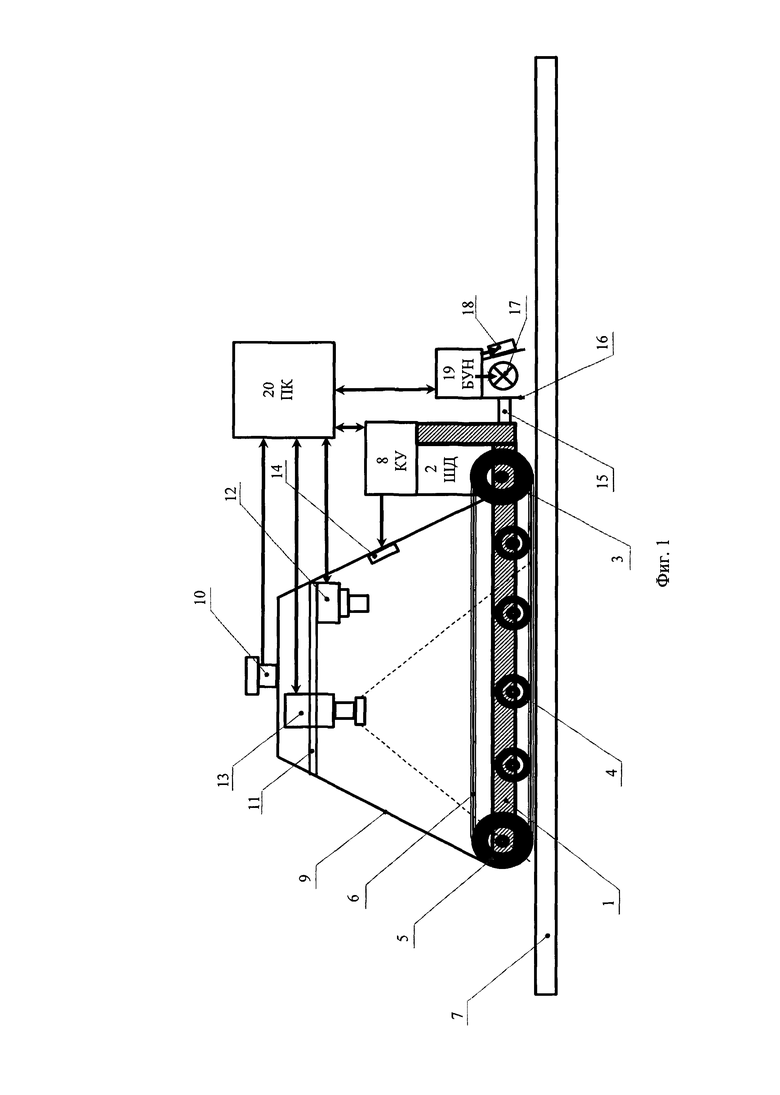
На фиг. 1 показан сканирующий тепловизионный дефектоскоп, вид сбоку.
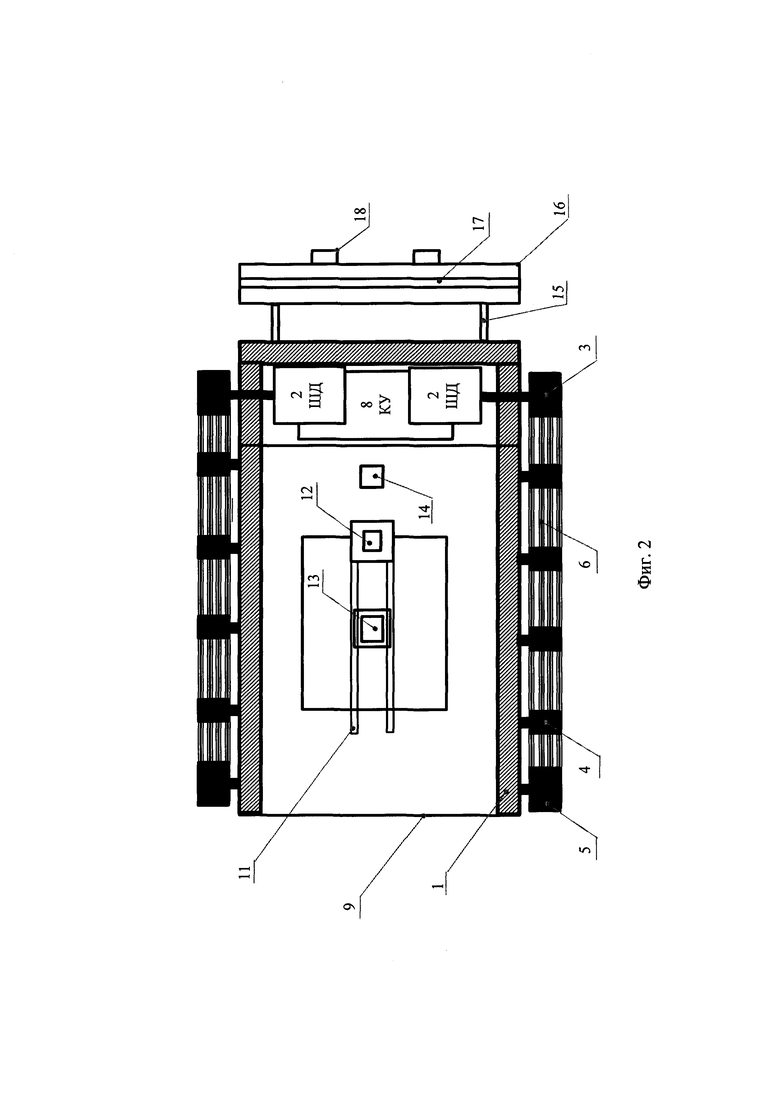
На фиг. 2 показан сканирующий тепловизионный дефектоскоп, вид снизу.
Сканирующий тепловизионный дефектоскоп содержит несущую П-образную раму 1, два лонжерона которой в передней части соединены поперечиной. К внутренней поверхности поперечины прикреплены два шаговых двигателя 2 (ШД), на валах которых, пропущенных через отверстия в лонжеронах, закреплены ведущие колеса 3. На внешней стороне каждого из лонжеронов на равном расстоянии от ведущего колеса и друг от друга закреплены валы, на которые с помощью подшипников посажены натяжные ролики 4 и ведомое колесо 5. Ведущие колеса 3 и ведомые колеса 5 снабжены выступами на их образующих, имеют равные размеры и расположены на разных концах лонжеронов. На каждую пару ведущего 3 и ведомого 5 колес с натягом надет замкнутый армированный ремень с впадинами 6 так, что натяжные ролики 4, размещенные между ними, касаются внутренней поверхности ремня 6, внешняя поверхность которого соприкасается с поверхностью объекта контроля 7.
К поперечине П-образной рамы 1 прикреплен контроллер управления 8 (КУ), к которому подключены шаговые двигатели 2 (ШД).
Сверху на лонжеронах П-образной рамы 1 закреплен кожух 9 в виде усеченной пирамиды, на верхней поверхности которой установлен лазерный сканирующий измеритель расстояния 10 с углом обзора 360°. Внутри кожуха 9 параллельно его верхней поверхности установлены две направляющие 11, на которых закреплена оптическая камера 12, поле зрения которой направлено на поверхность объекта контроля 7. Тепловизор 13 установлен на направляющих 11 с возможностью продольного перемещения по ним так, чтобы поле зрения тепловизора 13 было направлено вертикально вниз на поверхность объекта контроля 7. На внутренней боковой поверхности кожуха 9 закреплен источник светодиодной подсветки 14, который соединен с контроллером управления 8 (КУ).
К поперечине прикреплены выступающие вперед кронштейны 15, на которых установлен корпус-отражатель 16. Трубчатый оптический источник нагрева 17 расположен внутри корпуса-отражателя 16, направляющего излучение на поверхность объекта контроля 7. На корпусе-отражателе 16 закреплены блок управления нагревом 19 (БУН) и вентиляторы принудительного охлаждения 18, расположенные на равном расстоянии друг от друга. Блок управления нагревом 19 (БУН) соединен с вентиляторами 18 и оптическим источником нагрева 17.
Контроллер управления 8 (КУ), лазерный сканирующий измеритель расстояния 10, оптическая камера 12, тепловизор 13 и блок управления нагревом 19 (БУН) соединены с компьютером 20 (ПК).
П-образная рама 1 может быть изготовлена из металлического уголка с плечом 25 мм. В качестве шаговых двигателей 2 (ШД) могут быть использованы шаговые двигатели PL42H48-D5 с моментом 5,5 кг-см. Контроллер управления 8 (КУ) - плата Arduino Nano. Использован лазерный сканер расстояния с углом обзора 360° фирмы YDLIDAR X2L. В качестве оптической камеры 12 может быть использована камера FLIR Blackfly со спектральным диапазоном 0,4-0,7 мкм, а в качестве тепловизора 13 - тепловизионный модуль FLIR A325sc с температурной чувствительностью 0,06°С, матрицей размером 320×240 и частотой записи термограмм 10 Гц. Источник светодиодной подсветки 14 - светодиодный модуль мощностью 1 Вт, работающий в диапазоне от 0.4-0.9 мкм. Трубчатый оптический источник нагрева 17 - галогенная лампа мощностью 1 кВт. В качестве вентиляторов 18 могут быть использованы кулеры DeepCool XFAN 20. В качестве блока управления нагревом 19 (БУН) может быть использован модуль Ke-USB24R с набором реле, управляющим высоковольтными нагрузками через USB интерфейс.Замкнутые армированные ремни 6 - вариаторные ремни шириной 47 мм и толщиной 12 мм фирмы Continental.
Сканирующий тепловизионный дефектоскоп помещают на поверхность объекта контроля 7, например, на крупногабаритную панель крыла самолета, изготовленную из композиционных материалов. На объекте контроля 7 устанавливают с помощью присосок метки в виде конусов, ограничивающих зону проводимых исследований.
С помощью программы теплового контроля, установленной на компьютере 20 (ПК), посылают команду для запуска лазерного сканирующего измерителя расстояния 10, который определяет положение дефектоскопа относительно положения меток. После этого задают траекторию движения дефектоскопа для контроля всей поверхности объекта контроля 7 таким образом, чтобы избежать влияния нагрева ранее проконтролированной полосы на соседнюю полосу контроля и проводить контроль со смещением через одну полосу нагрева. Задают величину перекрытия соседних полос контроля на 10% от ширины полосы контроля, которая зависит от длины оптического источника нагрева 17 и направления потока излучения, формируемого корпусом-отражателем 16.
В зависимости от теплофизических характеристик объекта контроля 7, его толщины, а также коэффициента излучения его поверхности, с помощью компьютера 20 (ПК) устанавливают скорость перемещения сканирующего теплового дефектоскопа посредствам изменения частоты вращения роторов шаговых двигателей 2 (ШД), приводящих в движение ведущие колеса 3. Выступы на образующих ведущих колес 3 приходят в зацепление с впадинами на внутренней поверхности замкнутых армированных ремней 6, в результате чего ремни 6 приводят во вращение ведомые колеса 5, выступы на образующих которых также приходят в зацепление с впадинами замкнутых армированных ремней 6. Натяжные ролики 4 находятся в контакте с внутренней поверхностью замкнутых армированных ремней 6, обеспечивая натяжение замкнутых армированных ремней и предотвращая их проскальзывание на ведущих колесах 3, а также сползание с ведущих 3 и ведомых 5 колес. С помощью компьютера 20 (ПК) устанавливают частоты записи термограмм тепловизором 13 и изображений оптической камерой 12. В кожухе 9 на направляющих 11 регулируют положение тепловизора 13 таким образом, чтобы в его поле зрения попадали точки на поверхности объекта контроля 7, нагретые с помощью трубчатого оптического источника нагрева 17 через заданное оператором время.
После этого с помощью компьютера 20 (ПК) подают сигнал на контроллер управления 8 (КУ) для запуска шаговых двигателей 2 (ШД) и начала движения сканирующего теплового дефектоскопа по заданной траектории, а также включения источника светодиодной подсветки 14. Одновременно с этим с помощью компьютера 20 (ПК) подают сигнал на блок управления нагревом 19 (БУН) для запуска оптического источника нагрева 17 и вентиляторов принудительного охлаждения 18.
После начала движения сканирующего теплового дефектоскопа, компьютер 20 (ПК) посылает сигнал на тепловизор 13 для начала непрерывной регистрации температурных полей поверхности объекта контроля 7 с заданной частотой для формирования последовательности инфракрасных термограмм, непрерывной передачи записанных термограмм в компьютер 20 (ПК) и их сохранения. Одновременно с этим компьютер 20 (ПК) посылает сигнал на оптическую камеру 12 для начала непрерывной регистрации изображений поверхности объекта контроля 7 с заданной частотой, а также их последующего сохранения.
В течение всей процедуры исследований лазерный сканирующий измеритель расстояния 10 с углом обзора 360° передает данные о текущем расстоянии до меток в компьютер 20 (ПК), который сравнивает текущее положение сканирующего теплового дефектоскопа с ожидаемым положением согласно заданной траектории движения, и в случае их расхождения посылает сигнал в контроллер управления 8 (КУ) для изменения частоты вращения ротора соответствующего шагового двигателя 2 (ШД), корректируя траекторию движения.
После регистрации температурных полей всей поверхности объекта контроля 7, компьютер 20 преобразует сохраненные термограммы каждой полосы контроля в панорамные карты дефектов, а затем сшивает в результирующую карту дефектов объекта контроля 7. За счет реализации тепловизионного контроля методом сканирования панорамные карты дефектов характеризуются равномерным температурным полем, на котором надежно выявляются температурные аномалии, обусловленные внутренними дефектами. После этого, с помощью программы, установленной на компьютер 20 (ПК) верифицируют выявленные дефекты в виде температурных аномалий по зарегистрированным оптической камерой 12 изображениям с соответствующими координатами. Например, выявленные тепловизором 13 тепловые аномалии могут быть связаны с неравномерным распределением коэффициента излучения по поверхности объекта контроля, либо с наличием посторонних предметов или конструктивных элементов на контролируемой поверхности. В случае, если тепловая аномалия на термограмме совпадает с соответствующим видимым изображением, то эта аномалия является ложной дефектной отметкой.
Сканирующий тепловизионный дефектоскоп обеспечивает непрерывный контроль подповерхностных дефектов с производительностью до 15 м2/ч при длине трубчатого оптического источника нагрева 0,25 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕПЛОВИЗИОННЫЙ ДЕФЕКТОСКОП | 2015 |
|
RU2580411C1 |
| ТЕПЛОВОЙ ДЕФЕКТОСКОП | 2018 |
|
RU2696933C1 |
| УСТРОЙСТВО ДЛЯ ТЕПЛОВОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КРУПНОГАБАРИТНЫХ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 2018 |
|
RU2697437C1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| СПОСОБ ТЕПЛОВОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КРУПНОГАБАРИТНЫХ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 2021 |
|
RU2774040C1 |
| Способ дефектоскопии в полимерных конструкциях с сотовым заполнителем с применением термографии | 2024 |
|
RU2835766C1 |
| ТЕПЛОВИЗИОННАЯ СИСТЕМА ДЛЯ ПРОВЕДЕНИЯ НАРУЖНОЙ ТЕПЛОВИЗИОННОЙ СЪЕМКИ | 2014 |
|
RU2575798C1 |
| ТЕРМОГРАФИЧЕСКИЙ СПОСОБ КОНТРОЛЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670186C1 |
| ТЕРМОГРАФИЧЕСКИЙ СПОСОБ КОНТРОЛЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2659617C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ НАРУЖНОЙ ДИАГНОСТИКИ ТРУБОПРОВОДА И АВТОМАТИЗИРОВАННЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2757203C1 |
Изобретение относится к исследованию материалов, а именно, к неразрушающему контролю материалов и изделий активным тепловым методом и может быть использовано для сплошного автоматизированного контроля подповерхностных дефектов в крупногабаритных плоских изделиях, выполненных из композиционных материалов и сотовых структур и относящихся к авиационной, ракетной и космической отраслям промышленности. Сканирующий тепловизионный дефектоскоп содержит два шаговых двигателя, которые прикреплены к внутренней поверхности поперечины, соединяющей два лонжерона несущей П-образной рамы в ее передней части. На валах шаговых двигателей, пропущенных через отверстия в лонжеронах, закреплены ведущие колеса. На внешней стороне каждого из лонжеронов на равном расстоянии от ведущего колеса и друг от друга закреплены валы, на которые с помощью подшипников посажены натяжные ролики и ведомое колесо. Ведущие и ведомые колеса равных размеров снабжены выступами на их образующей и расположены на разных концах лонжеронов, причем на каждую пару ведущего и ведомого колес с натягом надет замкнутый армированный ремень, имеющий на его внутренней поверхности впадины так, что натяжные ролики, размещенные между ними, касаются внутренней поверхности ремня, внешняя поверхность которого соприкасается с поверхностью объекта контроля. К поперечине П-образной рамы прикреплен контроллер управления, к которому подключены шаговые двигатели. Сверху на лонжеронах закреплен кожух в виде усеченной пирамиды, на верхней поверхности которой установлен лазерный сканирующий измеритель расстояния с углом обзора в 360°. Внутри кожуха параллельно его верхней поверхности установлены направляющие, на которых закреплена оптическая камера, поле зрения которой направлено на поверхность объекта контроля. На направляющих с возможностью продольного перемещения по ним установлен тепловизор, поле зрения которого направлено вертикально вниз на поверхность объекта контроля. На внутренней боковой поверхности кожуха закреплен источник светодиодной подсветки, который соединен с контроллером управления. К поперечине П-образной рамы с помощью выступающих вперед кронштейнов прикреплен корпус-отражатель, внутри которого установлен трубчатый галогенный источник нагрева. На корпусе-отражателе закреплены вентиляторы принудительного охлаждения и блок управления нагревом, соединенные между собой. Тепловизор, оптическая камера, лазерный сканирующий измеритель расстояния, контроллер управления и блок управления нагревом соединены с компьютером. Технический результат - неразрушающий автоматизированный контроль подповерхностных дефектов в крупногабаритных плоских изделиях с высокой производительностью и достоверностью. 2 ил.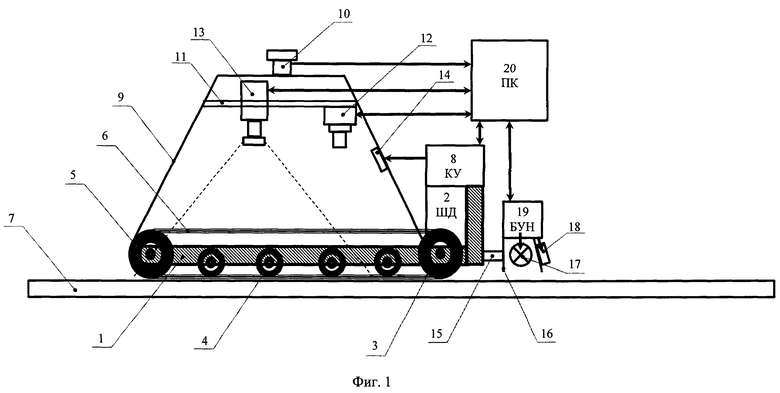
Сканирующий тепловизионный дефектоскоп, содержащий два электродвигателя, два ведущих колеса, корпус-отражатель, формирующий поток излучения, установленного в нем трубчатого оптического галогенного источника нагрева, на поверхность объекта контроля, тепловизор, поле зрения которого направлено на поверхность объекта контроля, лазерный сканирующий измеритель расстояния с углом обзора в 360° и компьютер, отличающийся тем, что в качестве электродвигателей использованы шаговые двигатели, которые прикреплены к внутренней поверхности поперечины, соединяющей два лонжерона несущей П-образной рамы в ее передней части, причем на валах шаговых двигателей, пропущенных через отверстия в лонжеронах, закреплены ведущие колеса, на внешней стороне каждого из лонжеронов на равном расстоянии от ведущего колеса и друг от друга закреплены валы, на которые с помощью подшипников посажены натяжные ролики и ведомое колесо, ведущие и ведомые колеса равных размеров снабжены выступами на их образующих и расположены на разных концах лонжеронов, на каждую пару ведущего и ведомого колес с натягом надет замкнутый армированный ремень с впадинами на его внутренней поверхности так, что натяжные ролики, размещенные между ними, касаются внутренней поверхности ремня, внешняя поверхность которого предназначена для взаимодействия с поверхностью объекта контроля, при этом к поперечине П-образной рамы прикреплен контроллер управления, к которому подключены шаговые двигатели, сверху на лонжеронах закреплен кожух в виде усеченной пирамиды, на верхней поверхности которой установлен лазерный сканирующий измеритель расстояния, внутри кожуха параллельно его верхней поверхности установлены направляющие, на которых закреплена оптическая камера, поле зрения которой направлено на поверхность объекта контроля, на направляющих с возможностью продольного перемещения по ним установлен тепловизор, поле зрения которого направлено вертикально вниз на поверхность объекта контроля, на внутренней боковой поверхности кожуха закреплен источник светодиодной подсветки, который соединен с контроллером управления, к поперечине с помощью выступающих вперед кронштейнов прикреплен корпус-отражатель, внутри которого установлен трубчатый галогенный источник нагрева, на корпусе-отражателе закреплены вентиляторы принудительного охлаждения и блок управления нагревом, соединенные между собой, тепловизор, оптическая камера, лазерный сканирующий измеритель расстояния, контроллер управления и блок управления нагревом подключены к компьютеру.
| J | |||
| Domin, R | |||
| Bialecki, J | |||
| Zajac et al, "Wheeled robot dedicated to the evaluation of the technical condition of large-dimension engineering structures", Robotics, 2020, 9(2), 28 | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| Чулков А | |||
| О | |||
| Вавилов В | |||
| П | |||
| Нестерук Д | |||
| А | |||
| Ширяев В | |||
| В., "УСТАНОВКА И РЕЗУЛЬТАТЫ АКТТИВНОГО | |||

