Изобретение относится к военной технике, использующей способы прицеливания управляемых ракет в системах наведения, применяемых в прицельных комплексах бортового вооружения вертолетов. Совершенствование прицельных комплексов позволяет повысить эффективность применения управляемых ракет с многоспектральными головками самонаведения на выбранные оператором цели.
Известен способ "двух лучей" для прицеливания и наведения ракеты на цель, который использовался в обзорно-прицельной оптико-электронной системы (ОПС) первых поколений управляемых ракет класса "воздух-поверхность", размещаемых на вертолетах, "Способ наведения управляемой ракеты (патент РФ №2436031)" [1]. Этот способ, заключающийся в наведении оператором на цель линии прицеливания, и управлении ракеты до совмещения ее целью с помощью глазомерного измерения отклонения положения ракеты от цели, имеет очевидные недостатки: невысокую скорость движения ракеты, а следовательно, большое время полета (20-25 с), наличие непоражаемой зоны перед огневой позицией глубиной 300-600 м, утомляемость оператора и др. Дальнейшее совершенствование этого подхода было связано с тем, что слежение за ракетой, измерение ее отклонения от линии прицеливания, выработка и передача команд на борт летящей ракеты, а затем на ее органы управления, было возложено на автоматическую систему наведения. Последующие изменения свелись к использованию второй системы наведения, которая должна была заменить действия оператора.
Любое совершенствование обзорно-прицельной оптико-электронной системы (ОПС) носителя, обеспечивающей экипаж всей необходимой информацией для ведения боевых операций, является следствием развития управляемых ракет "воздух-поверхность" как нового класса высокоточного оружия. Одна из первых таких прицельных систем, получившая название «Кайра» (Микоян, Гуревич МиГ-27, "Уголок неба", 2009) [2], использовала способ лазерного прицеливания. При его применении летчик должен удерживать ракету после пуска в поле зрения и в створе радиолуча вплоть до попадания в цель в условиях, когда приходится совершать противозенитное маневрирование, увеличивающее нагрузку на оператора. Кроме того, использование радиолуча для автоматического обнаружения и сопровождения малозаметной цели, как это реализуется для воздушных целей, оказалось невозможным из-за невысокой радиоконтрастности цели на фоне местности, где обнаружение цели в сложных метеоусловиях осложняется складками рельефа и маскирующей растительностью.
Применение новых технологий, микроэлектроники и оптико-электронной техники, использование принципов телевизионного слежения за целью с лазерным каналом целеуказания обеспечило дальнейшее развитие ОПС. В этом случае поиск цели осуществлялся с помощью дневного телевизионного канала. Типовую цель типа танк "Кайра" была способна обнаружить с расстояния до 5 км. Телевизионный канал "Кайры" был связан с лазерным дальномером, осуществляющим измерение дальности до цели и ее подсветку лазерным лучом. Обнаружив цель и произведя операцию ее целеуказания, летчик обеспечивал с помощью системы синхронную координатную привязку лазерного луча к объекту атаки. Ракета наводится на подсвеченную лазерным излучением цель с помощью БЦВМ по специально разработанной программе (программно-корректируемое слежение (ПКС)), где учитывается направление луча, скорость ракеты, перемещение носителя.
Последующие испытания показали, что режим ПКС оказался неэффективным. Вычислительный комплекс из-за ограниченного быстродействия и недостатков алгоритмов не успевал отслеживать перемещение цели при маневрах самолета. Чтобы добиться точного удержания перекрестья на цели, летчику приходится корректировать наведение.
В настоящее время в ведущих странах мира проводятся работы, направленные на совершенствование оптических и оптоэлектронных координаторов, тепловизионных и радиолокационных головок самонаведения (ГСН), а также устройств коррекции для систем управления тактическими ракетами, что неизбежно затрагивает и ОПС. В современных системах ОПС производит поиск, обнаружение и сопровождение целей по их тепловому излучению под любым ракурсом цели на фоне земли и водной поверхности в дневное и ночное время, при наличии организованных помех, производит измерение дальности до целей лазерным дальномером.
Известен способ прицеливания в комбинированной головке самонаведения с полуактивным лазерным, тепловизионным и активным радиолокационным каналами, которой намечено оснастить перспективную УР JCM, предназначенную для ударных вертолетов типа AH-64D "Апач Лонгбоу" и OH-58D [3]. В комплексе реализован способ прицеливания и наведения по волоконно-оптической линии связи (ВОЛС). В этом случае на ракете установлена теплотелевизионная камера, с которой передается наблюдаемое изображение оператору ОПС на носителе и он ведет управление ракетой. Конструктивно оптоэлектронный блок приемников ГСН и радиолокационная антенна выполнены в единой следящей системе, что обеспечивает их раздельную либо совместную работу в процессе наведения. В ГСН реализован принцип комбинированного самонаведении в зависимости от типа цели (контрастной в видимой области спектра, контрастной в тепловой области спектра или радиоконтрастной) и условий применения, в соответствии с которыми автоматически выбирается оптимальный метод наведения в одном из режимов работы ГСН, а остальные используются для формирования контрастного отображения цели при расчете точки прицеливания. Иллюстрацией может служить комплекс Spike-ER (Израиль), предназначенный для поражения бронированной и другой номенклатуры целей на небольших дальностях и размещаемый на ударных вертолетах АН-1 Cobra, SA 330L Puma и др. [4]. Эффективная дальность стрельбы комплекса - 8 км, максимальная скорость полета ракеты - 180 м/с, средняя - 160 м/с, время полета ракеты на 8 км - 50 с, вероятность поражения цели типа «танк» - 0,6-0,7.
Указанный комплекс содержит ОПС с теплотелевизионным прицелом, систему отображения информации (видеомониторы), вычислитель, пульт управления комплексом и пусковую установку с ракетами, а также теплотелевизионную ГСН, блок электроники, рулевой привод и катушку ВОЛС, размещенные на ракете. В комплексе используются два режима управления ракетой: автономное самонаведение в случае захвата ГСН цели до пуска и комбинированное ручное управление по ВОЛС с участием оператора (при отсутствии захвата ГСН цели до пуска) при последующем захвате ГСН цели и самонаведение на конечном участке.
Основными недостатками прицельного комплекса, обусловленными заложенными в него способами прицеливания и наведения, являются:
- не обеспечивается залповая стрельба ракетами по нескольким целям на дальностях более 4-5 км из-за ручного наведения оператором ракеты по ВОЛС;
- не обеспечивается эффективная стрельба по движущимся наземным целям на больших дальностях вследствие низкой скорости и большого времени полета ракеты;
- наличие ручного наведения с участием оператора требует значительного снижения скорости ракеты, при этом возрастает вероятность поражения вертолета средствами ПВО противника.
В качестве примера комплекса наведения, где не используется управление по ВОЛС, можно отметить "вертолетный комплекс высокоточного оружия ближнего действия" (изобретение (19)RU(11) 2351508(13) С1) [5], в котором прицеливание и наведение ракеты ведется через управление лазерным лучом от лазерно-лучевого блока, установленного в ОПС, и управляемого оператором в процессе всего этапа наведения.
Последние десятилетие ознаменовались глубоким проникновением в современные комплексы наведения управляемого оружия принципа "пустил и забыл", при котором после пуска ракеты, последняя автоматически наводится на цель без участия оператора, а носитель свободен в своих действиях. Реализация этого принципа нашла свое воплощение, прежде всего при внедрении пассивных телетепловизионных систем самонаведения, которые имеют на сегодняшний день наилучшие характеристики по пространственному разрешению, обеспечивая тем самым высокую точность попадания в цель. Впервые подобные системы нашли применение в организации процесса пуска ракет (AGM-114 «Хеллфайр» и AGM-65 «Мейверик», [6]) в, так называемом, способе прицеливания "из-под крыла", при котором оператор непосредственно управляет линией визирования телетепловизионных системы, по изображению, получаемому с ее датчика в момент пуска. В этом случае, оператор, при обнаружении с помощью ОПС потенциальной цели, через пульт управления управляет гиростабилизированной платформой ракеты так, чтобы линия визирования (оптическая ось) теплотелевизионной камеры, установленной на платформе гирокоординатора ракеты, была направлена на цель. Изображение с камеры передается на монитор ОПС и позволяет оператору произвести целеуказание и перевести систему автосопровождения ракеты на автосопровождение цели, и только после этого возможен пуск ракеты.
В качестве прототипа для сравнения с заявляемым принят способ прицеливания "из-под крыла". Производимая последовательность действий оператора имеет очевидные недостатки, что обусловлено рядом объективных факторов. Характеристики теплотелевизионного прицела ОПС (угол зрения, формат фотоприемника его камеры) имеют лучшие значения, чем характеристики теплотелевизионной камеры, установленной на ракете. Это обусловлено тем, что для того, чтобы не заходить в зону поражения, ОПС должна иметь сложную высокоточную оптическую систему для обнаружения целей на предельных дальностях. Однако подобную оптическую систему из-за ее габаритных характеристик невозможно установить в ракету. Если при этом учесть, что всегда имеется расхождение между векторами направлений осей оптических систем ОПС и ракеты, обусловленное инструментальными ошибками юстировки обеих оптических систем, ошибками угловых датчиков, механическими колебаниями мест подвески ракет и т.д., то целеуказание по изображению только от ОПС неизбежно приводит к ошибочному захвату цели и конечному промаху. Чтобы этого не происходило, оператор должен производить целеуказание по изображению от теплотелевизионной камеры, установленной на ракете, приводящее к увеличению времени на захват цели и уменьшению рабочей дальности, что, в конечном счете, равноценно увеличению вероятности поражения вертолета средствами ПВО.
Предлагаемый способ автоматизации прицеливания призван устранить указанные недостатки, обеспечивает оперативность целеуказания и высокую точность наведения тактической ракеты по стационарным и подвижным целям при соблюдении принципа "пустил и забыл" и повысить живучесть носителя, что достигается эффективным использованием информации, получаемой от обзорно-прицельной системы (ОПС) вертолета, на этапах прицеливания, пуска и управления управляемой ракеты в процессе ее полета.
Необходимо отметить, что предлагаемый способ работает с изображением, полученным от любого источника видеосигнала: от телевизионной камеры, работающей в видимом диапазоне, либо от тепловизионной камеры, работающей в средней или дальней инфракрасных областях спектра. Поэтому в дальнейшем описании при упоминании теплотелевизионного источника сигнала (как это указано в прототипе) следует рассматривать общий вид оптико-электронной системы, имеющий в своем составе тот или иной тип сигнала.
Способ прицеливания на вертолетном комплексе, включающий формирование точки целеуказания при наблюдении изображения сцены на видеомониторе ОПС с теплотелевизионным прицелом и наведению линии визирования тепловизионной камеры гирокоординатора на цель, используя пульт управления, привода наведения и информацию с датчиков углов поворота ОПС, отличающийся тем, что
- что оператор задает точку целеуказания по цифровому изображению сцены (кадру), полученному тепловизионной камерой теплотелевизионного прицела; в соответствии с протоколом обмена цифровое изображение через аппаратуру информационного обмена поступает в блок формирования эталонов для его автоматической обработки, с учетом углов полей зрения и разрешения чувствительной матрицы камер теплотелевизионного прицела и тепловизионной камеры гирокоординатора ракеты (далее гирокоординатора) производят его сжатие в цифровое изображение, используемое как эталонное с метрическими характеристиками, совпадающими с аналогичными характеристиками изображения тепловизионной камеры гирокоординатора;
- метрическая корректировка изображения учитывает характеристики мгновенных полей теплотелевизионного прицела Rтп и тепловизионной камеры гирокоординатора Rткг, и сводится к его сжатию по формуле:
Net=K*Nтп,
где Net - формат формируемого сжатого эталонного изображения,
K=(Ртп*Nткг)/(Nтп*Рткг);
Ртп - поле зрения тепловизионной камеры прицела;
Рткг - поле зрения тепловизионной камеры гирокоординатора;
Nтп - формат фотоприемника камеры прицела;
Nткг - формат фотоприемника камеры гирокоординатора;
- запоминаются сжатое и фрагмент исходного несжатого цифрового изображения, сформированный вокруг точки, указанной оператором в момент целеуказания; сжатое цифровое изображение считается как первое эталонное, а фрагмент несжатого цифрового изображения, полученное в момент целеуказания, как второе эталонное;
- первое эталонное изображение и текущее изображение с тепловизионной камеры гирокоординатора обрабатываются региональными градиентными операторами для представления этих изображений в виде полей яркостных аномалий; осуществляется процесс привязки, реализующий функцию нормированной кросс-корреляции для поиска в текущем изображении места, соответствующего эталонному сжатому изображению (первому эталонному изображению);
- по координатам найденного места производится автоматическое целеуказание для системы автосопровождения ГСН ракеты;
- в процессе полета ракеты и автоматического слежения за целью по сигналу от инерциально-навигационной системы (ИНС) ракеты, вычисляющей дальность до цели, при дальности, когда метрические характеристики текущего изображения, получаемого с тепловизионной камеры гирокоординатора совпадают с метрическими характеристиками несжатого изображения от теплотелевизионного прицела, занесенного в память (второму эталонному изображению), запускается последующий процесс привязки по второму эталонному изображению;
- для этого из памяти осуществляется выборка второго эталонного изображения; второе эталонное изображение и текущее изображение с тепловизионной камеры гирокоординатора обрабатываются региональными градиентными операторами для представления этих изображений в виде полей яркостных аномалий;
- осуществляется процесс привязки, реализующий функцию нормированной кросс-корреляции для поиска в текущем изображении тепловизионной камеры гирокоординатора места расположения цели, соответствующего второму эталону;
- по координатам на растре вновь найденного уточненного места расположения цели производится новое целеуказание и перевод автосопровождения на уточненное место расположения цели.
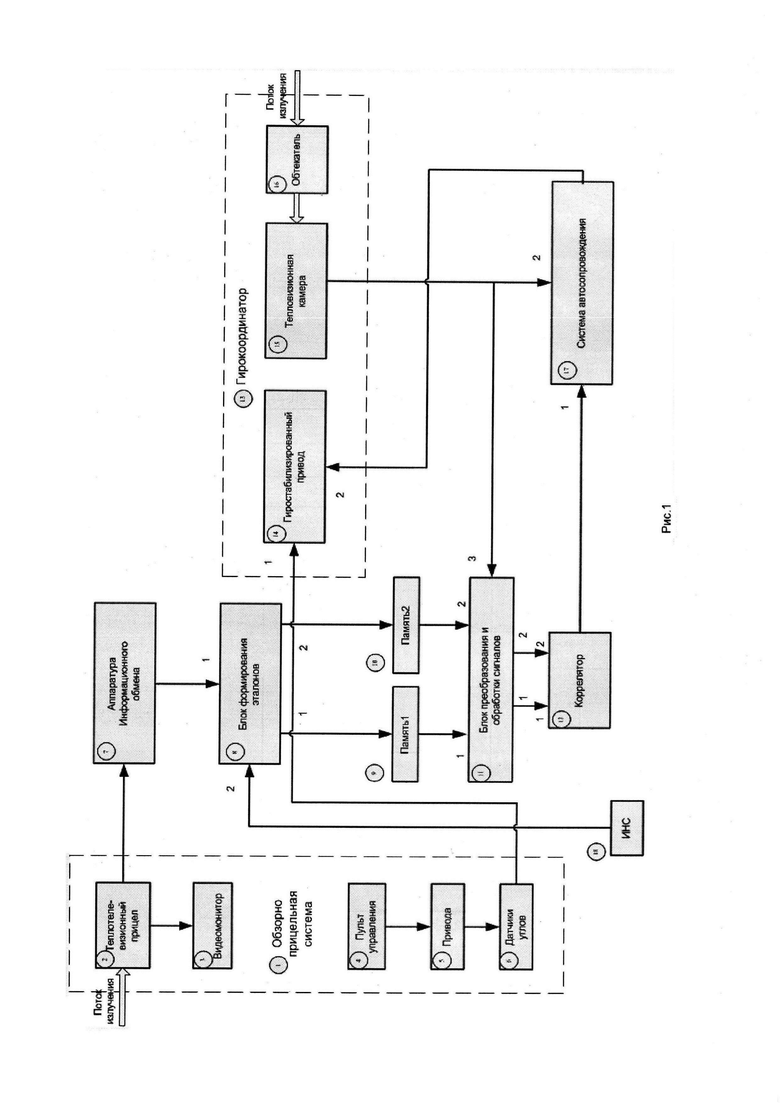
На рис. 1 представлена блок-схема предлагаемого способа, содержащая основные функциональные блоки, иллюстрирующие последовательность необходимых действий для его реализации.
Введены следующие обозначения по функциональным блокам:
1 - Обзорно-прицельная система (ОПС), в составе:
2 - теплотелевизионный прицел
3 - видеомонитор
4 - пульт управления
5 - привода
6 -датчики углов
7 - Аппаратура информационного обмена
8 - Блок формирования эталонов
9 - Память 1
10 - Память 2
11 - Блок преобразования и обработки сигналов
12 - Коррелятор
13 - Гирокоординатор, в составе
14 - гиростабилизированный привод
15 - тепловизионная камера
16 - обтекатель
17 - Система автосопровождения
18 - Информационо-навигационная система (ИНС)
Предлагаемый способ прицеливания реализуется следующим образом. Оператор ОПС вертолета, наблюдая на мониторе (3) сцену, видимую через теплотелевизионный прицел (2), содержащий узкопольную оптическую систему, производит поиск цели. При обнаружении объекта-цели оператор с помощью пульта управления (4) и сопряженных приводов (5) направляет ось линии визирования прицела на цель. Считываемые с датчиков углов (6) пространственного положения линии визирования прицела данные поступают на гиростабилизированный привод (14) гирокоординатора (13), который ориентирует ось линии визирования широугольной тепловизионной камеры ракеты (15) в направлении на цель. Однако это направление, как отмечалось выше, отличается от направления, которое дает тепловизионный прицел. Возникающая ошибка не позволяет произвести надежный захват малоразмерных целей. Кроме того, при работе на предельных дальностях, малоразмерная цель может быть не видна на изображении с широугольной тепловизионной камеры ракеты. Поэтому цифровое изображение сцены (кадр), полученное тепловизионной камерой теплотелевизионного прицела с координатами точки целеуказания, заданной оператором, в соответствии с протоколом обмена через аппаратуру информационного обмена (7) поступает в блок формирования эталонов (8) для его автоматической обработки. Из принятого цифрового изображения выбирается участок вокруг точки, указанной оператором в момент целеуказания и запоминается в памяти 2 (10) как второе эталонное изображение. Кроме этого, с этим изображением проводится операция сжатия с целью свести его метрические характеристики к метрическим характеристикам тепловизионной камеры гирокоординатора. Для этого используются значения характеристики мгновенных полей обеих камер
Коэффициент сжатия K определяется как
K=Rтп/Rткг=(Ртп*Nткг)/(Nтп*Рткг);
Тогда формат Net формируемого сжатого эталонного изображения определяется формулой
Net=K*Nтп,
Сжатое изображение считается первым эталонным и запоминается в памяти 1 (9). Первое эталонное, извлеченное из памяти 1, и текущее изображение с тепловизионной камеры гирокоординатора, полученное в момент целеуказания, поступают в блок преобразования и обработки сигналов (11), где с помощью обработки региональными градиентными операторами эти изображения представляются в виде полей яркостных аномалий. Последующей операцией является обработка в корреляторе (12), где осуществляется процесс привязки, реализующий функцию нормированной кросс-корреляции. В результате действий производится поиск в текущем изображении места, имеющее наилучшее соответствие первому эталонному изображению, в центре которого находится объект-цель, указанная оператором ОПС.
По координатам найденного места производится автоматическое целеуказание для системы автосопровождения (17) за целью, по сигналам управления с которой в процессе последующего полета производится управление гиростабилизированным приводом (14) гирокоординатора (15) и коррекция полета ракеты.
В процессе полета ракеты с бортовой информационно-навигационной системы (ИНС) (18) считывается информация о дальности до объекта-цели. При дальности, когда метрические характеристики текущего изображения, получаемого с тепловизионной камеры гирокоординатора, совпадают с метрическими характеристиками несжатого изображения от теплотелевизионного прицела, занесенного в память 2 (второго эталона), запускается еще один процесс привязки.
Второе эталонное (несжатое) изображение извлекается из памяти 2. Второе эталонное изображение и текущее изображение с тепловизионной камеры гирокоординатора поступают в блок преобразования и обработки сигналов (11), где обрабатываются региональными градиентными операторами для представления этих изображений в виде полей яркостных аномалий. Последующей операцией является их обработка в корреляторе (12), где осуществляется процесс привязки, реализующий функцию нормированной кросс-корреляции, осуществляющий новый процесс привязки для коррекции точки целеуказания. По координатам вновь найденного уточненного места производится новое целеуказание и перевод автосопровождения на уточненную точку целеуказания, соответствующую целеуказанию оператора в момент прицеливания. Вырабатываемые при этом сигналы управления корректируют направление линии визирования гирокоординатора и направление полета ракеты.
1. Способ наведения управляемой ракеты (патент РФ №2436031)
2. Микоян, Гуревич МиГ-27, "Уголок неба", 2009
3. "Зарубежное военное обозрение" №1, 2006 г., стр. 40-44.
4. Military Technology, 1998, №4, рр. 26-28; Compendium by Armada, Anti-Armour Weapons, 2000, pp. 1-30.
5 Вертолетный комплекс высокоточного оружия ближнего действия изобретение (19)RU(11) 2351508(13) С1
6. Дмитриев В. "Управляемая ракета "Мейверик" с тепловизионной головкой самонаведения", Зарубежное военное обозрение, N3, 1983
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ РАКЕТЫ | 2023 |
|
RU2826814C1 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОКОРАБЕЛЬНОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2771076C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 2020 |
|
RU2751433C1 |
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
| СПОСОБ ВОЗДУШНОЙ РАЗВЕДКИ НАЗЕМНЫХ (НАДВОДНЫХ) ОБЪЕКТОВ С ЦЕЛЬЮ ТОПОГЕОДЕЗИЧЕСКОГО, МЕТЕОРОЛОГИЧЕСКОГО И ДРУГИХ ВИДОВ ОБЕСПЕЧЕНИЯ ПУСКОВ (СБРОСОВ) УПРАВЛЯЕМЫХ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННЫХ ГОЛОВОК САМОНАВЕДЕНИЯ | 2020 |
|
RU2771965C1 |
| Зенитный ракетный комплекс | 2017 |
|
RU2651533C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
Способ относится к военной технике, в части прицельных комплексов бортового вооружения вертолетов, использующих различные способы прицеливания систем наведения управляемых ракет. Согласно способу прицеливания на вертолетном комплексе, при использовании оптико-электронной системы ОПС, оператор способен наблюдать сцену и обнаруживать цели на больших дальностях и при лучшей разрешающей способности, нежели, если бы он осуществлял наблюдение с помощью оптико-электронной системы, установленной на самой ракете, имеющей худшее угловое разрешение. Пересчитывают с учетом метрики изображение с ОПС (изображение_1, в дальнейшем - эталон) к изображению, снимаемому с датчика камеры ракеты (изображение_2), то изображение_1 окажется лишь только фрагментом изображения_2, с сохранением (хотя и грубым) всех особенностей участка сцены в виде неких яркостных аномалий как самой цели, так и ее ближайшего окружения. Затем производят операции по метрическому согласованию этих двух изображений, учитывая тот факт, что оба изображения получены в одно время и из одного места (хотя и с разных датчиков), то можно утверждать, что эти изображения весьма схожи. Различия наблюдаются в яркостной картине и уровне шумов. Последующая обработка градиентным региональным оператором контрастирует яркостные аномалии обоих изображений, что позволяет с помощью средств корреляционного сопоставления изображений с применением функции нормированной кросс-корреляции найти положение этого фрагмента (эталона) на изображении_2 и указать точку целеуказания. Техническим результатом способа является сокращение времени на захват цели оператором и увеличение рабочей дальности пуска ракеты, что в конечном счете равноценно уменьшению вероятности поражения вертолета средствами объектового ПВО. 1 ил.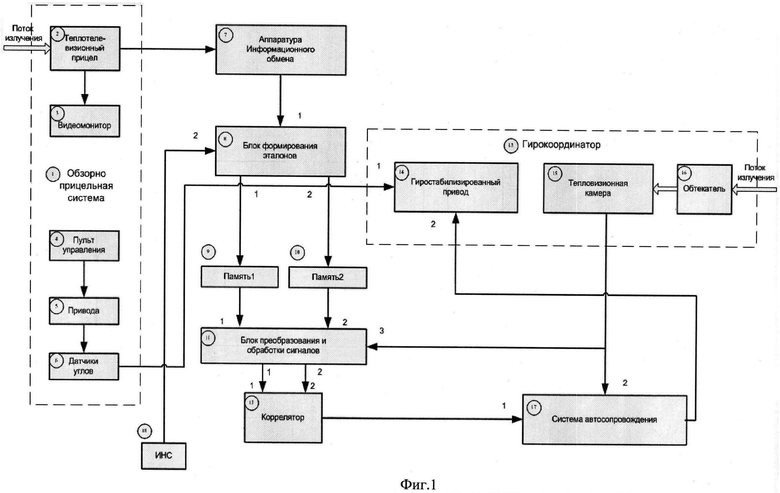
Способ прицеливания на вертолетном комплексе, заключающийся в том, что точка целеуказания задается оператором по изображению, наблюдаемому им на мониторе обзорно-прицельной системы (ОПС) с оптико-электронной системой (ОЭС) прицела, работающей в видимой, средней и дальней инфракрасных областях спектра, оператор производит электронный захват цели и передачу функции последующего слежения за ней на систему автосопровождения за целью по изображению от ОЭС камеры, установленной на гирокоординаторе ракеты, имеющей значения угла поля зрения и разрешения чувствительной матрицы камеры иные, чем значения этих характеристик для ОЭС прицела, отличающийся тем, что из цифрового изображения сцены с ОЭС прицела вырезается и запоминается фрагмент изображения вокруг точки целеуказания, а полное цифровое изображение сцены с ОЭС прицела сжимается для получения соответствия метрических характеристик ОЭС прицела и камеры гирокоординатора, фрагмент и сжатое изображение обрабатываются региональным градиентным оператором, получаемые от ОЭС камеры изображения, также обрабатываются тем же региональным градиентным оператором, используя сжатое и обработанное изображение от прицела, производится операция сопоставления его с несжатым изображением от ОЭС камеры средствами функции нормированной кросс-корреляции для нахождения точки целеуказания на изображении ОЭС камеры, координаты найденной точки передаются в систему автосопровождения для дальнейшего слежения за целью, при дальности, когда метрика запомненного фрагмента совпадает с метрикой текущего изображения от ОЭС камеры гирокоординатора, производится повторная нормированная кросс-корреляция этого фрагмента с некоторой областью изображения (обработанной градиентным оператором) около текущей точки слежения для ее коррекции.
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ КООРДИНАТНЫХ СМЕЩЕНИЙ ОБЪЕКТА СЛЕЖЕНИЯ В ПОСЛЕДОВАТЕЛЬНОСТИ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2460135C1 |
| US 9829279 B1, 28.11.2017. | |||

