Область техники.
Изобретения относятся к области навигации летательных аппаратов и могут быть использованы для определения контрольных значений параметров пространственно-угловой ориентации самолета при летных испытаниях пилотажно-навигационного оборудования (ПНО) на основе комплексной обработки информации по полетным данным радионавигационных, автономных средств навигации с использованием цифровых методов фотограмметрии.
Уровень техники.
Известен способ определения действительных значений координат траектории и угловых параметров самолета при летных испытаниях систем, датчиков пилотажно-навигационного оборудования (ПНО), основанный на аналоговой аэрофотосъемке земной поверхности плановым аэрофотоаппаратом и наземной фотограмметрической обработке аэрофотокадров и включающий идентификацию фотокадров и соответствующих топографических карт, выбор на фотокадрах ориентиров или контуров, геодезически привязанных на топографических картах, измерение координат этих точек на фотокадрах на компараторе и на топокарте в масштабе карты и вычисление значений координат траектории и угловых параметров полета самолета с помощью зависимостей аналитической фотограмметрии (П.И. Власов, Н.В. Костиков, М.И. Тихомирова, А.А. Уколов. Исследование систем и датчиков ПНО. Летные исследования и испытания. Фрагменты истории и современное состояние. Научно-технический сборник, Москва, "Машиностроение", 1993 г., стр. 370-371).
Зависимость между координатами соответствующих точек местности и аэрофотоснимков в аналитической фотограмметрии при вычислении пространственного и углового положения фотокадра аэрофотоаппарата известны и приведены в анализе одиночного снимка (А.Н. Лобанов. Фотограмметрия. Москва, "Недра", стр. 134-151, аналог).
Один выбранный ориентир на фотокадре и топокарте порождает два уравнения, поэтому для определения трех пространственных и трех угловых параметров внешней ориентации фотокадра необходимо как минимум три хорошо опознаваемых ориентира.
Известен способ фотограмметрической калибровки фотокамер (патент RU 2308001 С1 от 18.01.2006 г., авторы: Малявский Б.К., Быков Л.В., Быков В.Л., Макаров А.П., аналог).
В этом способе вычисляют элементы внешнего ориентирования фотокадра, к которым относятся координаты центра фотографирования и углы наклона и поворота снимка. Для каждой точки составляют систему линейных уравнений. При использовании избыточной информации, например, если количество точек больше трех, может формироваться система нормальных уравнений. Системы уравнений решаются методом итераций к приближенно заданным параметрам внешнего ориентирования. Полученными в результате решения поправками исправляют приближенные значения неизвестных. Итерации повторяют до тех пор, пока величины поправок к элементам внешнего ориентирования не потеряют смысл.
В приведенных выше трех источниках показаны основные этапы фотограмметрического способа определения пространственно-угловой ориентации фотокадра аэрофотоаппарата, жестко связанного с самолетом, в полете и при наземной фотограмметрической обработке.
Этот способ хотя и обеспечивает достоверную и приемлемую точность на маршрутах в зависимости от масштаба используемой топографической карты (десятки метров по координатам и единицы угловых минут по угловым параметрам), однако большая трудоемкость фотограмметрических измерений на аналоговых фотокадрах, дискретность, зависимость от погодных условий и наличия топографических карт на трассы испытаний накладывают вполне определенные ограничения на его использование. В связи с развитием спутниковых технологий этот способ на определенное время потерял свою значимость.
Наиболее близкими к предлагаемым изобретениям является способ и система комплексной обработки информации радионавигационных и автономных средств навигации для определения действительных значений параметров самолетовождения (патент RU 2487419 С1 от 6 февраля 2012 г., автор Скрябин Е.Ф.). Способ заключается в том, что оценки координат, получаемые по полетным данным и в результате сопровождающего математического моделирования, объединяются по критериям однородности и принадлежности одной и той же генеральной совокупности и статистически обрабатываются.
Данный способ осуществляется в известной из того же патента блок-схеме системы, основанной на использовании измерительной информации инерциальной навигационной системы (ИНС), содержащей радионавигационный корректор - спутниковой навигационной системы (СНС) и автономный корректор данных ИНС - вычислительного блока корреляционно-экстремальной обработки информации. Наземная часть системы выполнена на персональной электронной вычислительной машине (ПЭВМ).
Система повышает автономность, надежность и точность определения действительных значений координат самолетовождения.
Система обеспечивает достаточную точность определения координат местоположения на трассах, приаэродромных зонах.
Однако использование этой системы как контрольного средства не всегда целесообразно для испытаний вновь создаваемых ПНО без использования цифровых методов фотограмметрии при комплексной обработке информации (КОИ) по полетным данным.
Современное развитие геоинформационных технологий по созданию цифровых топографических карт, планов и различных моделей местности включает разработку и применение для аэрофотосъемки технологичных цифровых топографических аэрокамер и использование цифровой фотограмметрии как новой технологии обработки фотокадров (Медведев Е.М., Данилин Е.М., Мельников С.Р. Лазерная локация Земли и леса. Красноярск: Институт леса им. В.Н. Сукачева СО РАН, 2005 г.).
В публикации "Аэрофотосъемка с БПЛА-ортофотоплан" (httm://umnand/ru/service/aerophoto.htm) приводится современная технология аэрофотосъемки земной поверхности для оперативного картографирования, включающая применение на борту БПЛА зеркальной фотокамеры с разрешением в десятки мегапикселей, тепловизора и видеокамеры с HD разрешением, при этом для привязки аэрофотокадров по координатам местоположения используются GPS-приемники, которые при совместной работе с наземными базовыми GPS-станциями в постобработке дают высокую точность. А для определения траектории самолета применяется метод совместной обработке GPS-данных и данных инерциальной системы.
Результатом цифровой аэрофотосъемки являются цифровые аэрофотоснимки, а также зафиксированные в полете элементы их внешнего ориентирования (линейные - координаты центра фотографирования и угловые, относительно горизонтальной системы координат).
Однако в этой технологии не предусмотрена фотограмметрическая обработка фотокадров методом аналитической фотограмметрии, т.к. точность навигации для создания ортофотоплана определяется точностью GPS навигации и особенностями систем автоматического управления БПЛА при выдерживании оси маршрута и углового положения между фотокадрами. Эта технология не предназначена для определения контрольных значений навигационно-пилотажных параметров летательного аппарата.
Современные геоинформационные технологии характеризуются, в основном, следующим:
- применение интегральных навигационных комплексов для оценки элементов внешнего ориентирования аэрофотокадров;
- цифровая аэрофотографическая информация и создаваемая картографическая информация легко представляется на электронных носителях в виде файлов в определенном формате;
- точность создаваемой картографической продукции: цифровых топографических карт, планов, моделей местности и рельефа и т.п. - достаточно высокая и составляет порядка 5-20 см;
- продолжительность послеполетной фотограмметрической обработки приближается к полетному времени и стремится к полной автоматизации;
- проводится бортовая лазерно-локационная съемка, причем в сочетании с цифровой фотосъемкой.
Все цифровые геоинформационные системы предназначены для создания картографической продукции: цифровых топографических карт и планов, цифровых моделей рельефа местности, ортофотопланов и т.д.
Но в процессе фотограмметрической обработки цифровых изображений местности, полученной при аэрофотосъемке, всегда происходит пространственная и угловая ориентация фотокадров, а именно определение 6-ти параметров: широты φ, долготы λ, абсолютной высоты Н абс. центра фотокадра и углового положения фотокадра, функционально связанного с углами курса ψ, крена γ и тангажа ϑ самолета. По существу, эти значения параметров фотокадра идентифицируются с параметрами носителя аэрофотоаппарата - самолета и могут использоваться потребителями как контрольные при испытаниях разрабатываемых ПНО.
Цифровые геоинформационные системы в практике летных исследований достаточно использовать только для этого промежуточного этапа обработки фотокадров.
Таким образом, прогресс в создании цифровых геоинформационных технологий и методов в создании картографической продукции, а именно: формирование и представление аэрофотограмметрической и картографической информации в цифровом виде на электронных носителях флеш-накопителях, высокая точность картографических материалов при использовании цифровой фотограмметрии, автоматизация и уменьшение продолжительности фотограмметрической обработки предопределяют задачу формирования качественно новых информационно-измерительных способов и систем определения контрольных значений навигационно-пилотажных параметров самолета.
Технический результат, на достижение которого направлены изобретения, заключается в повышении технологичности и достижении высокой точности, объективности, практической непрерывности определения контрольных значений параметров пространственно-угловой ориентации самолета, а также в малозатратности при эксплуатации и послеполетной обработке на маршрутах, специальных и приаэродромных зонах испытаний бортового оборудования путем использования цифровой геоинформационной системы и цифровых методов фотограмметрии.
Существенные признаки.
Для достижения этого технического результата в способе определения контрольных значений параметров пространственно-угловой ориентации самолета на трассах и в приаэродромных зонах при летных испытаниях пилотажно-навигационного оборудования (ПНО), включающем измерения инерциальной навигационной системы (ИНС), корректирование данных ИНС автономным средством и радионавигационное корректирование данных ИНС спутниковой навигационной системой (СНС) в стандартном или в дифференциальном режиме работы с использованием базовой корректирующей станции (БКС) или контрольной корректирующей станции (ККС), измерения высоты полета воздушным (аэрометрическим) датчиком или системой (ВДС), сигналы которых регистрируются на модифицированном комплексе бортовых траекторных измерений (КБТИ-М) для комплексной обработки информации (КОИ) в процессе полета, а именно для предварительной обработки измерительной информации в блоке (ПОИИ), формирования векторов измерений (ФВИ) с контролем для защиты фильтра Калмана, оценку погрешностей ИНС (ОП ИНС) при использовании модифицированного фильтра Калмана, вычисления навигационных параметров (ВНП) с одновременным подключением к нему второго выхода блока ПОИИ, а также наземную обработку исходной измеряемой информации от ИНС, СНС, БКС и данных ВДС, вычисление навигационных параметров (ВНП) с учетом измерительной информации, поступающей из ПОИИ, оценивание координат, получаемых по полетным данным, объединяемые по критериям однородности и принадлежности одной и той же генеральной совокупности и их статистическую обработку на персональной электронно-вычислительной машине (ПЭВМ), на борту в полете дополнительно производят аэрофотосъемку земной поверхности с задаваемым интервалом фотографирования топографическим среднеформатным кадровым цифровым аэрофотоаппаратом (ЦАФА). При этом сигналы срабатывания затвора ЦАФА записываются на КБТИ-М для синхронизации фотокадров с информацией от ИНС, СНС и ВДС. Фотокадры формируют в виде цифровых матриц изображений местности, которые записываются на электронные носители ЦАФА. После полета производят фотограмметрическую обработку цифровых изображений фотокадров, размещенных в блоке цифровой информации аэрофотокадров (ЦИАФ) ПЭВМ при использовании цифровых топографических карт местности крупного масштаба на зону полета (ЦТК), которые также представляются в цифровом формате и размещают в блоке ЦТК ПЭВМ с применением измерительного монитора, экран которого разделен на левую и правую измерительные части для вывода соответствующих цифровых изображений фотокадров и карт местности, их взаимной прокрутки, идентификации, выбора одних и тех же опознанных ориентиров или опорных точек на фотокадрах и карте местности, измеряют координаты этих точек на фотокадрах и картах в масштабах их изображения с использованием измерительных марок или маркеров с учетом размеров и количества пикселей измерительного монитора. Параметры пространственно-угловой ориентации самолета в моменты срабатывания затвора ЦАФА определяют на ПЭВМ с помощью вычислительного блока аналитического метода фотограмметрии (АМФГМ), адаптированного к цифровым данным, используемого в качестве автономного корректора данных ИНС. При этом значения координат опорных точек, измеренных на цифровых топографических картах местности (ЦТК), на правой части экрана (ПЧЭ) измерительного монитора (ИМ) поступают в блок преобразования измеренных координат (ПИК) АМФГМ, где происходит их последовательное преобразование из системы Гаусса-Крюгера через геодезические и геоцентрические координаты в горизонтальную систему координат, которые вместе со значениями координат изображений опорных точек на цифровом фотокадре (ЦИАФ), измеренными на левой части экрана (ЛЧЭ) ИМ, поступают в блок формирования системы нормальных уравнений (ФСНУ), где происходит формирование системы уравнений поправок для опорных точек по вычисленным и измеренным координатам в фотографической системе аэрофотоснимка, для определения координат центра проекции фотокадра, функционально связанных с координатами центра масс самолета и углов внешнего ориентирования фотокадра, функционально связанных с углами крена, тангажа и курса самолета, достаточно трех опорных точек на фотокадре, при большем количестве точек формируется система нормальных уравнений. В качестве первого приближения искомых координат пространственно-угловой ориентации фотокадров в блоке ФСНУ используют интерполированные на моменты срабатывания затвора ЦАФА значения геодезических координат и углового положения самолета, вычисленные в КОИ КБТИ-М по инерциальной и спутниковой информации, и интерполированные значения абсолютной высоты полета от ВДС или бароинерциальных измерений. При этом в блоке ПИК предварительно геодезические координаты самолета пересчитывают в горизонтальную систему координат. Систему нормальных уравнений решают в блоке способа наименьших квадратов (СНК), вычисленные поправки из которого поступают в блок вычисления значений пространственных координат (ВПК) самолета при реализации итерационного процесса, для реализации которого выполняется обратная связь от блока ВПК на блок ПИК, где проводится преобразование координат центра фотокадра из горизонтальной системы координат в систему координат Гаусса-Крюгера. Процесс итераций продолжается до тех пор, пока поправки к искомым параметрам станут меньше установленных допусков. Значения параметров, вычисляют в ВПК в блоке АМФГМ, а именно широты, долготы, абсолютной высоты и углов курса, крена и тангажа самолета для всего полета, которые затем используют как корректирующее средство инерциальной информации в КОИ ПЭВМ. Для чего фотограмметрическая информация по всем фотокадрам, полученным в полете, поступает в блок предварительной обработки измерительной информации ПОИИ КОИ одновременно с информацией от инерциальной системы, спутниковой навигационной системы и данных ВДС, поступающей из базы данных КБТИ-М. В блоке ФВИ формируют векторы измерений по спутниковой и фотограмметрической информации, состоящие из поправок к координатам и скоростям самолета по осям платформы ИНС и поправок к вертикали и курсу ИНС по фотограмметрической информации, в блоке ОП ИНС определяют погрешности параметров, измеряемой инерциальной системой, а практически непрерывные значения контрольных пространственно-угловых параметров самолета в зоне испытаний ПНО определяют в блоке вычисления навигационных параметров (ВНП) КОИ ПЭВМ с учетом поступающей измерительной информации из блока ПОИИ. Погрешность параметров определяемых в блоке ВНП сопоставима с погрешностью точных фотограмметрических измерений, вычисленные контрольные значения пространственно-угловой ориентации самолета записываются в базу данных (БД) ПЭВМ, затем сравнивают их с измеренными значениями аналогичных параметров других испытываемых ПНО и анализируют их погрешности, объединяют их по критериям однородности и принадлежности одной и той же генеральной совокупности для проведения последующей статистической обработки.
При отсутствии цифровой топографической карты местности в предлагаемом способе используют лазерный ортофотоплан местности, для чего на борт дополнительно устанавливают импульсный цифровой лазерный локатор (ЦДЛ), с помощью которого в процессе полета проводится лазерная съемка земной поверхности, информация от которого: лазерное изображение местности (ЦЛИ), значения измеренной наклонной дальности и угла, определяющего направление распространения зондирующего луча в системе координат локатора, записываются на электронные носители локатора, а затем могут быть представлены на флеш-накопителях. Моменты прихода отраженных сигналов от земной поверхности, существующих строений регистрируют на КБТИ-М для последующей синхронизации с инерциальной, спутниковой информацией и данных ВДС. При этом в послеполетной обработке на ПЭВМ по бортовым измерениям наклонной дальности, значениям углов отклонения лазерного луча от вертикали и координатам самолета, вычисленным на борту при комплексной обработке инерциальной и спутниковой информации в КБТИ-М, создается ортофотоплан местности на зону полета в геодезической системе координат (ВГК). Для получения визуально адаптированного для восприятия изображения местности и существующих строений лазерное изображение обрабатывается при использовании специальной программы (ОЛИ), а последующая фотограмметрическая обработка проводится с фотокадрами и лазерным ортофотопланом с использованием ИМ и ПЭВМ.
Для достижения названного технического результата в предлагаемой системе, содержащей бортовую и наземную части измерительной системы: включающую в бортовую часть - инерциальную навигационную систему (ИНС), приемник спутниковой навигационной системы (СНС) в стандартном или в дифференциальном режиме работы, радиосвязанной с наземной базовой корректирующей станцией (БКС) или контрольной корректирующей станцией (ККС), воздушный датчик или систему (ВДС), модифицированный комплекс бортовых траекторных измерений (КБТИ-М), отдельно подключенные выходами к входам системы комплексной обработки информации радионавигационных и автономных средств навигации самолета (КОИ), а именно к входам блока предварительной обработки измерительной информации (ПОИИ), выход которого соединен с последовательно связанными блоком формирования векторов измерений (ФВИ), блоком оценки погрешностей ИНС (ОП ИНС) при использовании модифицированного фильтра Калмана, блоком вычисления навигационных параметров (ВНП) с одновременным подключением к нему второго выхода блока ПОИИ, в наземную часть - базовую корректирующую станцию (БКС) или контрольную корректирующую станцию (ККС), персональную электронную вычислительную машину (ПЭВМ), с сформированными в ней системой комплексной обработки информации (КОИ), автономным корректором данных ИНС, флеш-накопителем для формирования базы данных, на борту самолета дополнительно установлен топографический цифровой кадровый аэрофотоаппарат (ЦАФА) с измеряемыми установочными углами по основным строительным осям самолета. Коммутация сигналов срабатывания затвора ЦАФА связана с входом модифицированного комплекса КБТИ-М, соответственно, в наземной части в базу данных ПЭВМ включены блок цифровой информации аэрофотокадров (ЦИАФ) и блок цифровых данных топографических карт (ЦТК). Дополнительно установлен измерительный монитор (ИМ), экран которого разделен на две измерительные части, входы левой и правой частей соединены соответственно с выходами ЦИАФ и ЦТК. ПЭВМ сформирована с автономным корректором данных ИНС в виде вычислительного блока аналитического метода фотограмметрии (АМФГМ), содержащим последовательно связанные: блок преобразования измеренных координат точек (ПИК) из системы Гаусса-Крюгера в горизонтальную систему координат и обратно; блок формирования системы нормальных уравнений (ФСНУ), количество опорных точек должно быть больше трех; блок решений сформированной системы нормальных уравнений способом наименьших квадратов (СНК) для определения поправок к приближенным координатам центра проекции фотокадра и поправок к углам внешней ориентации фотокадра, функционально связанных через установочные углы аэрофотоаппарата с углами курса, крена и тангажа самолета; блок итерационного вычисления пространственных координат (ВПК) пространственно-угловой ориентации самолета на моменты срабатывания затвора ЦАФА, первый выход которого подключен через обратную связь ко второму входу ПИК, а второй выход подключен к первому входу блока ПОИИ КОИ ПЭВМ, третий вход ПИК соединен с выходом флеш-накопителя КОИ КБТИ-М, размещенным в ПЭВМ, для использования в расчетах в качестве первого приближения координат центра проекции фотокадра и его углового положения, интерполированных на моменты срабатывания затвора ЦАФА. Выходы двух измерительных частей монитора левого ЛЧЕ и правого ПЧЭ соответственно соединены со вторым входом блока ФСНУ и первым входом в блок ПИК. Второй вход блока ПОИИ связан с флеш-накопителем базы данных КБТИ-М по инерциальной, спутниковой информации и данных ВДС, а выход ПОИИ через блок формирования векторов измерений по спутниковой и фотограмметрической информации (ФВИ), состоящей из поправок к координатам и скоростям самолета по осям платформы ИНС и поправок к вертикали: углам крена, тангажа и к курсу ИНС только по данным АМФГМ, связан с блоком определения оценки погрешностей ИНС (ОП ИНС), выход которого с одновременным подключением второго выхода блока ПОИИ соединен с блоком ВНП-вычислителем контрольных значений пространственно-угловой ориентации: значений геодезических координат, абсолютной высоты и углов крена, тангажа и курса самолета при использовании информации от корректоров АМФГМ и СНС, связанным с входом блока базы данных контрольных значений ПЭВМ.
Кроме того, при отсутствии цифровой топографической карты местности используют цифровой лазерный ортофотоплан местности, для чего дополнительно на борту устанавливают цифровой импульсный лазерный локатор (ЦДЛ), временная шкала измерений которого связана со входом КБТИ-М, соответственно, в наземную часть системы ПЭВМ введены блок данных цифровых лазерных изображений (ЦЛИ), координаты и угловые положения самолета, вычисленные в КОИ КБТИ-М, связанный с их выходами блок вычисления геодезических координат точек лазерного изображения местности по измеренным наклонным дальностям, углам отклонения от вертикали лазерного луча и координатам самолета (ВГК), выход которого через блок обработки лазерных изображений (ОЛИ) связан с входом правой части экрана (ПЧЭ) измерительного монитора для получения визуально-адаптированного изображения местности, а вход левой части (ЛЧЭ) соединен с выходом ЦИАФ.
Таким образом, использование технологичных цифровых: топографического аэрофотоаппарата и лазерного импульсного локатора, оперативное получение фотокадров и лазерного изображения местности и представление цифровых изображений карт (планов) крупного масштаба и фотокадров на флеш-накопителях, применение измерительного монитора для фотограмметрической обработки фотокадров и цифровых карт (или лазерного ортофотоплана), использование аналитического метода фотограмметрии, адаптированного под цифровые данные, а также комплексная обработка практически непрерывной инерциальной и спутниковой информации и высокоточной дискретной фотограмметрической информации в полной мере реализует техническое решение заявляемых изобретений, а именно повышение технологичности и достижении высокой точности, объективности, оперативности и практической непрерывности определения контрольных значений параметров пространственно-угловой ориентации самолета, а также в малозатратности при эксплуатации и послеполетной обработке на маршрутах, специальных и приаэродромных зонах испытаний бортового оборудования.
Предлагаемые изобретения иллюстрируются чертежами, на которых изображены:
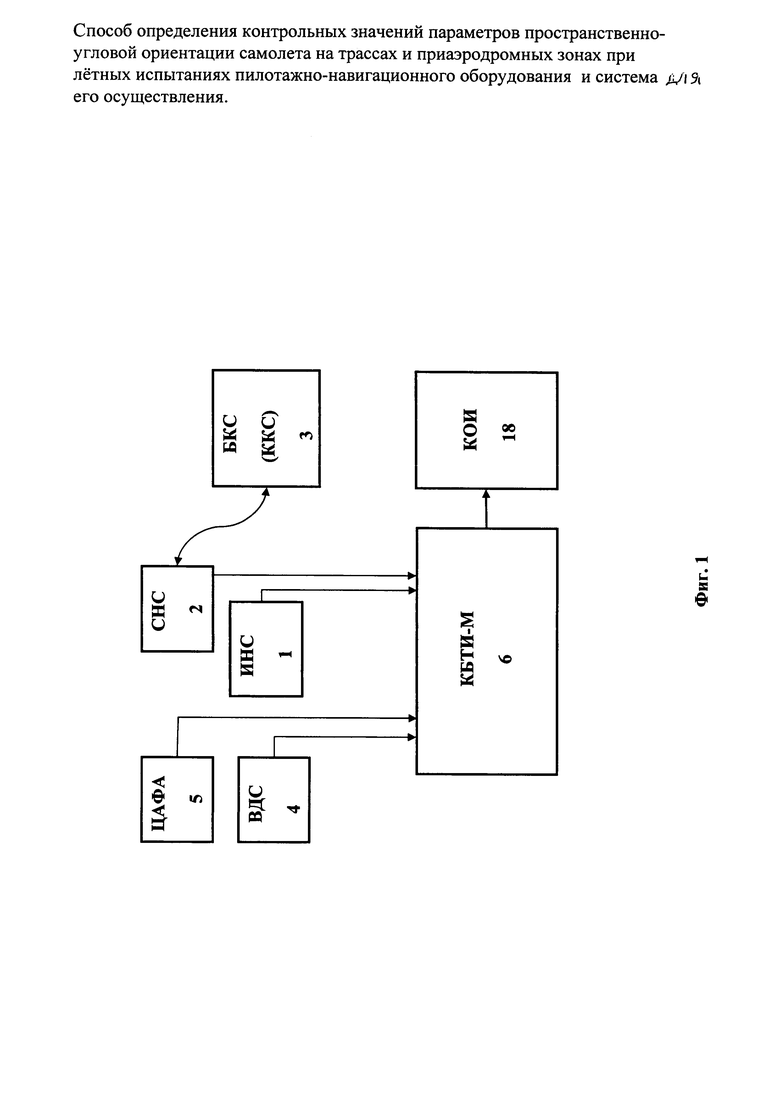
на фиг. 1 показана блок-схема регистрации информации на борту самолета во время полета с цифровым аэрофотоаппаратом;
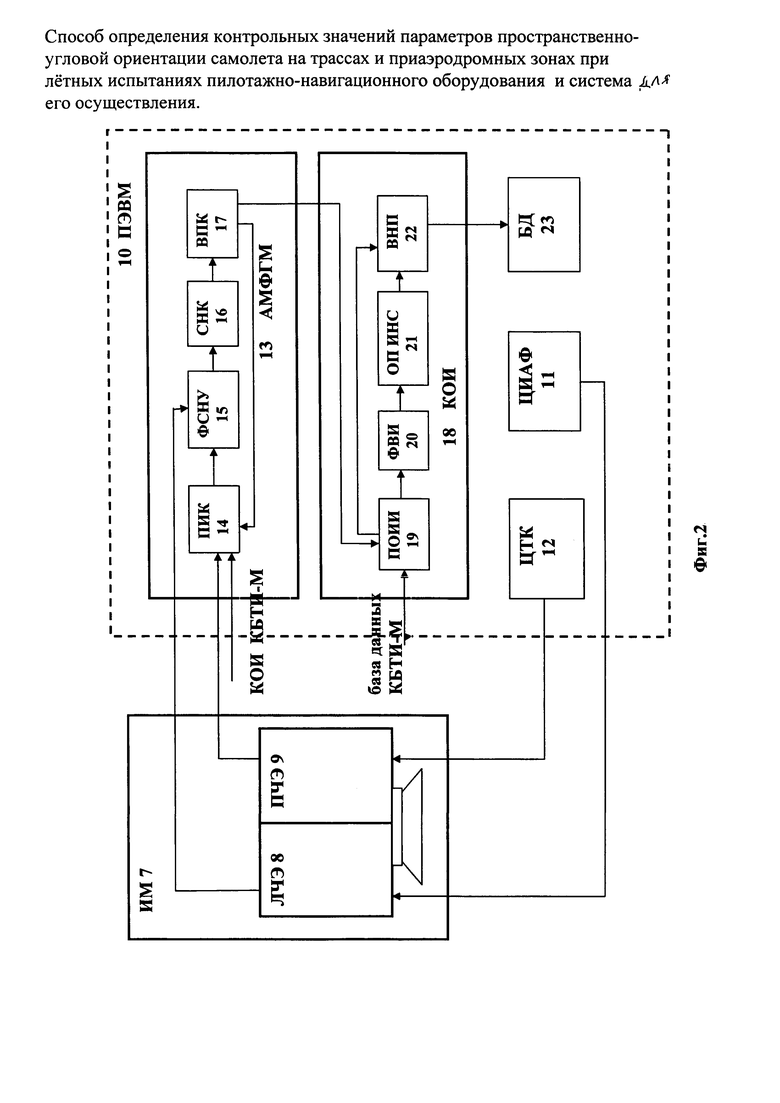
на фиг. 2 приведена блок-схема для послеполетной обработки информации, полученной во время полета самолета с цифровым аэрофотоаппаратом;
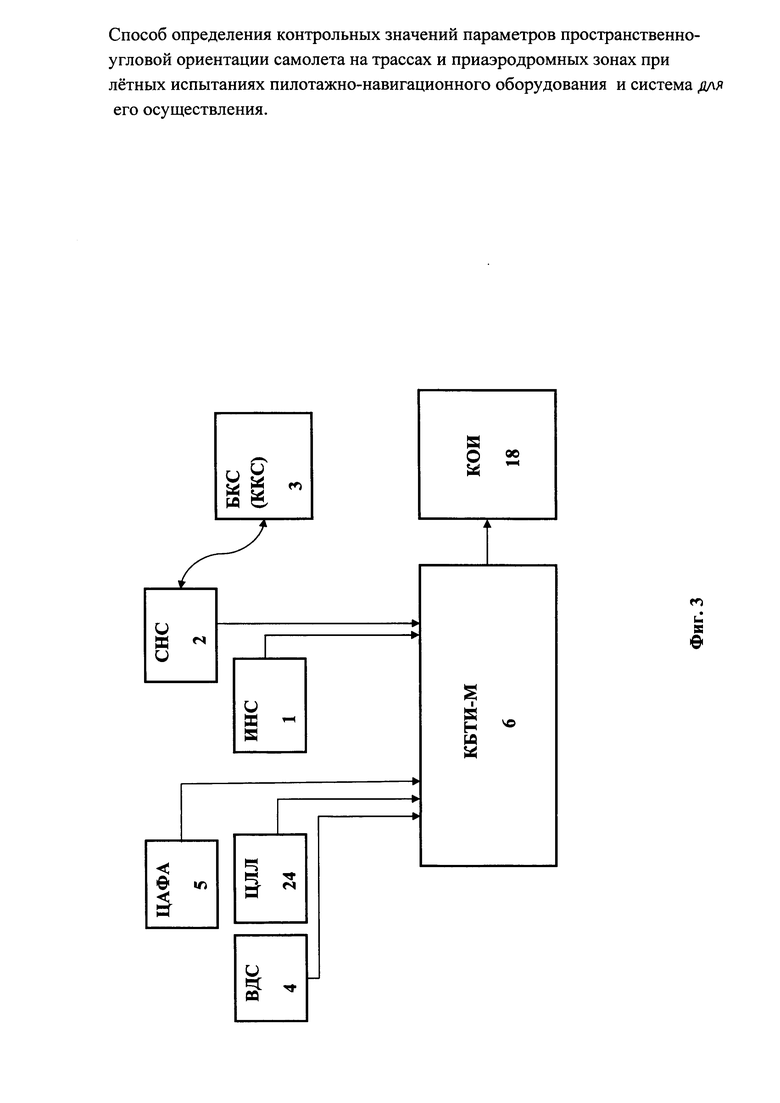
на фиг. 3 приведена блок-схема регистрации информации на борту самолета во время полета с цифровым аэрофотоаппаратом и цифровым лазерным локатором;
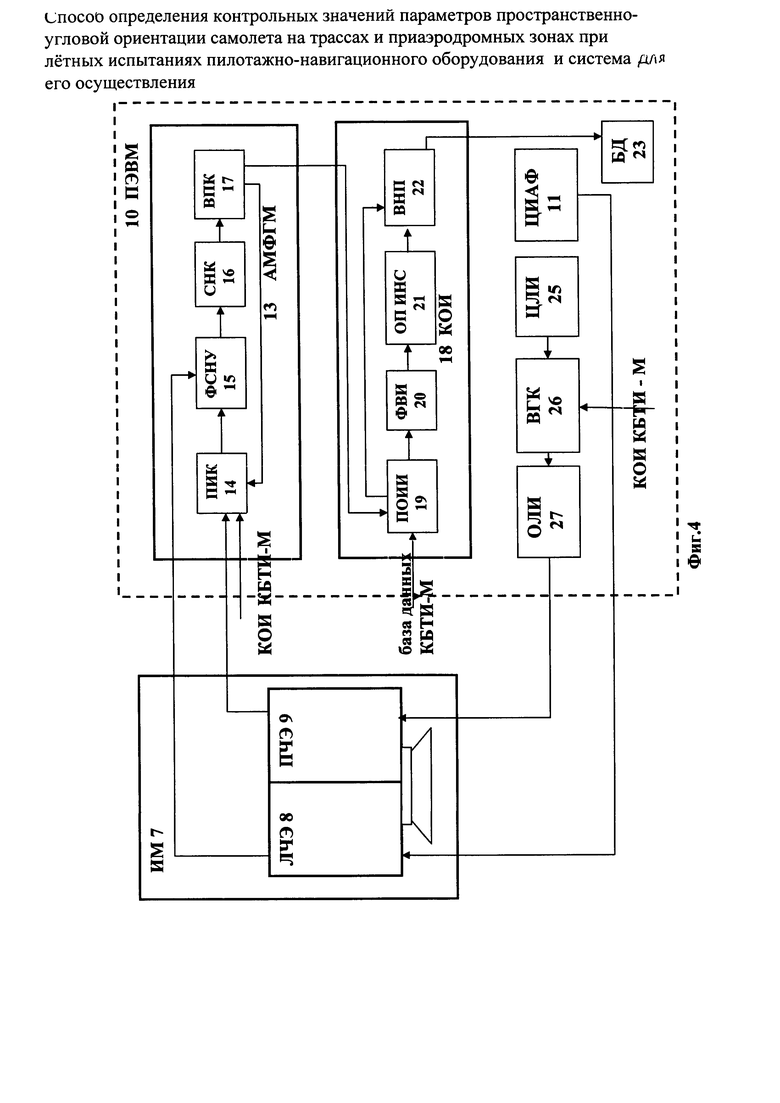
на фиг. 4 приведена блок-схема послеполетной обработки информации, полученной во время полета самолета с цифровым аэрофотоаппаратом и цифровым лазерным локатором.
Заявляемая система для определения контрольных значений параметров пространственно-угловой ориентации самолета на трассах и в приаэродромных зонах при летных испытаниях навигационно-пилотажного оборудования содержит (фиг. 1 и 2) бортовую и наземную части измерительной системы, включающая в бортовую часть - модифицированный комплекс бортовых траекторных измерений КБТИ-М 6 с системой комплексной обработкой информации (КОИ 18), схема КОИ не показана, связанные с его входами инерциальную навигационную систему ИНС 1, приемник спутниковой навигационной системы СНС 2 в стандартном и в дифференциальном режиме работы, радиосвязанный с наземной базовой корректирующей станции БКС 3 или контрольной корректирующей станцией ККС 3, воздушный датчик или систему ВДС 4. На борту устанавливают топографический цифровой кадровый аэрофотоаппарат (ЦАФА) 5 с измеряемыми установочными углами по основным строительным осям самолета, коммутация сигналов срабатывания затвора ЦАФА 5 связана со входом модифицированного комплекса КБТИ-М 6. В наземную часть - персональную электронную вычислительную машину ПЭВМ 10, базовую корректирующую станцию БКС 3 или контрольную корректирующую станцию ККС 3, базу данных КБТИ-М на флеш-накопителе, подключенным к входу второй системы комплексной обработки информации КОИ 18 ПЭВМ 10, а именно к входу блока предварительной обработки измерительной информации (ПОИИ) 19, выход которого соединен с последовательно связанными блоком формирования векторов измерений (ФВИ) 20, состоящих из поправок к координатам и скоростям самолета по осям платформы ИНС и поправок к вертикали и курсу ИНС, с контролем для защиты фильтра Калмана, блоком оценки погрешностей ИНС (ОП ИНС) 21 при использовании модифицированного фильтра Калмана, блоком вычисления навигационных параметров (ВНП) 22 с одновременным подключением к нему второго выхода блока (ПОИИ) 19.
Кроме того, в наземной части системы ПЭВМ 10 содержит автономный корректор ИНС, выполненный в виде вычислительного блока аналитического метода фотограмметрии (АМФГМ) 13, содержащим последовательно связанные блок преобразования измеренных координат точек (ПИК) 14 из системы Гаусса-Крюгера через геодезическую и геоцентрическую систему координат в горизонтальную систему координат и обратно; блок формирования системы нормальных уравнений (ФСНУ) 15, количество опорных точек должно быть больше трех; блок решений сформированной системы нормальных уравнений способом наименьших квадратов (СНК) 16 для определения поправок к приближенным координатам центра проекции фотокадра и поправок к углам внешней ориентации фотокадра, функционально связанных через установочные углы аэрофотоаппарата с углами курса, крена и тангажа самолета; блок итерационного вычисления пространственных координат (ВПК) 17 пространственно-угловой ориентации самолета на моменты срабатывания затвора ЦАФА 5, первый выход которого подключен через обратную связь ко второму входу ПИК 14, а второй выход подключен к первому входу блока ПОИИ 19 КОИ 18 ПЭВМ 10, третий вход ПИК 14 соединен с выходом КОИ 18 КБТИ-М 6, размещенным в ПЭВМ 10, для использования в расчетах в качестве первого приближения координат центра проекции фотокадра и его углового положения, интерполированных на моменты срабатывания затвора ЦАФА 5; выходы двух измерительных частей монитора левого ЛЧЕ 8 и правого ПЧЭ 9 соответственно соединены со вторым входом блока ФСНУ 15 и первым входом в блок ПИК 14; второй вход блока ПОИИ 19 связан с флеш-накопителем базы данных КБТИ-М 6 по инерциальной, спутниковой информации и данных ВДС 4, а выход ПОИИ 19 через блок формирования векторов измерений по спутниковой и фотограмметрической информации (ФВИ) 20, состоящей из поправок к координатам и скоростям самолета по осям платформы ИНС 1 и поправок к вертикали: углам крена, тангажа и к курсу ИНС 1 только по данным АМФГМ 13, связан с блоком определения оценки погрешностей ИНС (ОП ИНС) 21, выход которого с одновременным подключением второго выхода блока ПОИИ 19, соединены с блоком ВНП 22 - вычислителем контрольных значений пространственно-угловой ориентации: значений геодезических координат, абсолютной высоты и углов крена, тангажа и курса самолета при использовании информации от корректоров АМФГМ и СНС, связанным с входом блока базы данных контрольных значений ПЭВМ 10.
По второму варианту в заявляемой системе для определения контрольных значений параметров пространственно-угловой ориентации самолета на трассах и в приаэродромных зонах при летных испытаниях пилотажного-навигационного оборудования вместо карты местности используют цифровой лазерный ортофотоплан местности, для этого на самолете дополнительно установлен цифровой импульсный лазерный локатор (ЦДЛ 24) (фиг. 3 и 4), временная шкала измерений которого связана со входом КБТИ-М 6, и, соответственно, в наземной части в ПЭВМ 10 введены блок данных цифровых лазерных изображений (ЦЛИ) 25, координаты и угловые положения самолета, вычисленные в КОИ 18 КБТИ-М 6, связанный с их выходами блок вычисления геодезических координат точек лазерного изображения местности по измеренным наклонным дальностям, углам отклонения от вертикали лазерного луча и координатам самолета (ВГК) 26, выход которого через блок обработки лазерных изображений (ОЛИ) 27 связан с входом правой части экрана (ПЧЭ) 9 измерительного монитора (ИМ) 7 для получения визуально-адаптированного изображения местности, а вход левой части (ЛЧЭ) 8 соединен с выходом ЦИАФ 11.
Система работает следующим образом.
Пример 1.
Бортовая часть с установленным цифровым аэрофотоаппаратом функционирует следующим образом (фиг. 1):
- измеряемая информация о пространственно-угловых параметрах самолета от ИНС(1), СНС(2), ВДС(4), БКС (ККС)(3) (если используется дифференциальный режим СНС), а именно совокупность значений:
где
φинci, λинci, - значения координат широты, долготы, измеренные ИНС 1;
VNинci, VEинci - значения скорости по северному и восточному направлениям, измеренные ИНС 1;
ψинci, γинci, ϑинci - значения угла курса, крена и тангажа самолета, измеренные ИНС 1;
φcнci, λинci, VNcнci, VEcнci - значения соответственно широты, долготы и скорости самолета по северному и восточному направлениям, измеренные СНС 2;
Н абс.i - значения (абсолютной) высоты полета самолета от ВДС 4 или бароинерциальных измерений;
ΔD1i, …, ΔDni - поправки в псевдодальности от n спутников СНС 2 от БКС (ККС) 3;
регистрируются с частотой 1 Гц на КБТИ-М 6;
- сигналы срабатывания затвора ЦАФА 4 с заданным интервалом (≥2 с) также регистрируются на КБТИ-М 6;
- цифровые фотоизображения местности в процессе полета на ЦАФА 4 записываются на электронные носители аэрофотоаппарата и могут быть размещены на флеш-накопителях.
Наземная часть системы на борту функционирует следующим образом (фиг. 2):
- цифровые изображения аэрофотокадров и топографических карт (или планов) крупного масштаба на район полетов с соответствующими матрицам значений (в первом случае) координат пикселей в фотографической системе фотокадра, (а во втором случае) значений координат пикселей в системе Гаусса-Крюгера и высоты рельефа, записанные на флеш-накопителях, вводятся в ПЭВМ 10 и размещаются в соответствующих блоках, а именно: в ЦИАФ 11 ив ЦТК 12;
- в процессе фотограмметрической обработки цифровые изображения фотокадров из ЦИАФ 11 и карт из ЦТК 12 выводятся соответственно на ЛЧЭ 8 и ПЧЭ 9 ИМ 7;
- цифровые изображения фотокадров и карт могут прокручиваться вверх и вниз по отношению к друг к другу и перемещаться влево и вправо для сопоставления изображений, их идентификации в различных масштабах изображения на фотокадрах и карте, для выбора одинаковых контуров или опорных точек местности на фотокадрах и картах;
- с помощью светящихся маркеров (или марок) методом совмещения выбранных точек с перекрестием маркера и нажатием правой кнопки мыши производится измерение координат выбранных точек как на ЛЧЭ 8 в системе координат фотокадра, так и на ПЧЭ 9 в системе координат карты с учетом размера пикселей и их количества на экране ИМ 7. Значения измеренных координат, а именно:
xi, yi (i=1, …, n, где n=3, …, 6) - прямоугольные координаты опорных точек в фотографической системе аэрофотоснимка;
Xi, Yi, Hi (i=1, …, n, где n=3, …, 6) - прямоугольные координаты опорных точек с системе Гаусса-Крюгера, измеренные по карте и соответствующие им значения высоты рельефа над уровнем моря, поступают в вычислительный блок АМФГМ 13 (Книжников Ю.Ф., Гельман Р.Н. Компьютерная система для измерения цифровых стереопар при решении нетопографических задач и научных исследований. Геодезия и картография. 1999 г. №2 (стр. 136-149));
- в блоке ПИК 14 АМФГМ 13 ПЭВМ 10 происходит последовательное преобразование координат из системы Гаусса-Крюгера в горизонтальную систему координат и обратно по следующей схеме:
Xi, Yi, Hi↔φi, λi, H aбc.i↔Xгi, Yгi, Zгi↔Xгop.i, Yгop.i, Zгop.i;
где
Xi, Yi - прямоугольные координаты Гаусса-Крюгера;
φi, λi - геодезические координаты;
Hi - значения высоты рельефа над уровнем моря;
Н абс.i - значения абсолютной высоты;
Xгi, Yгi, Zгi - прямоугольные координаты в геоцентрической системе координат;
Хгор.i, Yгop.i, Zгop.i - прямоугольные координаты в горизонтальной системе координат.
а) Происходит последовательное преобразование измеренных на ПЧЭ 9 координат опорных точек на цифровой карте из системы Гаусса-Крюгера в горизонтальную систему координат по следующей схеме:
Xi, Yi, Hi↔φi, λi, H абс.i→Xгi, Yгi, Zгi→Xгop.i, Yгop.i, Zгop.i;
б) Происходит последовательное преобразование интерполированных на моменты срабатывания затвора ЦАФА 5 значений геодезических координат центра проекции фотокадров, вычисленные в блоке КОИ 18 КБТИ-М 6 при использовании инерциальной, спутниковой информации и значений абсолютной высоты полета от ВДС 4 или бароинерциальных измерений, по следующей схеме:
φц, λц, Н абс.ц→Хгц, Yгц, Zгц→Хгор.ц, Yгop.ц, Zгop.ц;
где
φц, λц - геодезические координаты центра проекции фотокадра;
Н абс.ц - абсолютная высота центра проекции фотокадра;
Хгц, Yгц, Zгц - геоцентрические координаты центра проекции фотокадра;
Хгор.ц, Yгор.ц, Zгop.ц - горизонтальные координаты центра проекции фотокадра.
Интерполяция указанных параметров производится локальными кубическими сплайнами.
в) Для получения при итерациях координат центра проекции фотокадров в системе координат Гаусса-Крюгера (Хц, Yц) осуществляется обратный переход по следующей схеме:
Xгор.ц, Yгор.ц, Zгор.ц→Хгц, Yгц, Zгц→φц, λц→Хц, Yц;
- в блоке ФСНУ 15 по расчетным координатам изображений опорных точек и по измеренным координатам (xi, yi i=1, …, n, где n=3, …, 6) в фотографической системе координат аэрофотоснимка происходит формирование системы уравнений поправок в виде:
ui=f(xi, Xгop.i, Yгop.i, Zгop.i, Хгор.ц, Yгop.ц, Zгop.ц, f,
a1, a3, b1, b3, c1, c3);
vi=f(yi, Xгop.i, Yгop.i, Zгop.i, Хгор.ц, Yгop.ц, Zгop.ц, f,
а2, а3, b2, b3, с2, с3);
(i=1, …, n, где n=3, …, 6);
где ui, vi - поправки к координатам опорных точек по осям фотографической системы координат аэрофотоснимка;
Хгор.ц, Yгop.ц, Zгop.ц - координаты центра фотокадра в горизонтальной системе координат;
f - фокусное расстояние цифрового аэрофотоаппарата;
ai, bi, ci (i=1, 2, 3) - направляющие косинусы углов ориентации фотокадра относительно горизонтальной системы координат.
На каждую опорную точку формируется два уравнения поправок. Для определения 6-ти параметров внешней ориентации фотокадра: координат центра фотокадра Хгор.ц, Yгop.ц, Zгop.ц и трех углов, функционально связанных с углами крена, тангажа и крена самолета, достаточно трех опорных точек на фотокадре. При избыточной информации (4-6 точек) формируется система нормальных уравнений.
- Сформированная система нормальных уравнений решается в блоке СНК 16 и вычисляются:
ΔХгор.ц, ΔYгop.ц, ΔZгop.ц - поправки к приближенным координатам центра проекции фотокадра;
Δα, Δω, Δκ - поправки к углам внешней ориентации фотокадра (α, ω, κ), функционально связанные через установочные углы аэрофотоаппарата с углами курса ψ, крена γ и тангажа ϑ самолета.
- В блоке ВПК 17 вычисляются значения параметров пространственно-угловой ориентации самолета на моменты срабатывания затвора ЦАФА 5 при использовании итерационного процесса, для реализации которого выполняется обратная связь от блока ВПК 17 на блок ПИК 14. Последующие значения параметров определяются, как сумма:
{X′гор.ц, Y′гор.ц, Z′гор.ц}={Xгор.ц, Yгор.ц, Zгор.ц }+
{ΔХгор.ц, ΔYгор.ц, ΔZгор.ц};
{α′, ω′, κ′}={α, ω, κ}+{Δα, Δω, Δκ}.
Процесс итераций продолжается до тех пор, пока поправки к неизвестным станут меньше заранее установленных допусков:
{|ΔXгор.ц|, |ΔYгор.ц|, |ΔZгор.ц|}≤ε1 (см);
{|Δα|, |Δω|, |Δк|}≤ε2 (угл.сек).
Пространственные координаты самолета в моменты фотографирования земной поверхности могут быть представлены в геодезической системе координат Красовского: φфгмi, λфгмi и Набс. фгмi - широта, долгота и абсолютная высота самолета, полученные фотограмметрическим методом.
Углы крена, тангажа и курса (ψфгмi, γфгмi, ϑфгмi) вычисляются с использованием направляющих косинусов ai, bi, ci (i=1, 2, 3) и установочных углов цифрового аэрофотоаппарата относительно связанной системы координат самолета.
Потенциальная точность определения пространственных координат самолета фотограмметрическим методом при использовании цифровых карт (или планов) крупного масштаба в моменты экспозиции будет составлять порядка 5-20 см, а угловых параметров: φфгмi, γфгмi, ϑфгмi - порядка 0,1угл. мин (Медведев Е.М., Данилин Е.М., Мельников С.Р. Лазерная локация Земли и леса. Красноярск: Институт леса им. В.Н. Сукачева СО РАН, 2005 г.);
- в ПОИИ 19 КОИ 18 ПЭВМ 10 измерительная информация от ИНС 1, СНС 2, ВДС 4 и АМФГМ 13 подвергается предварительной обработке, которая включает: синхронизацию и контроль параметров, а также при необходимости сглаживание и прореживание (данных ИНС 1 и СНС 2);
- в ФВИ 20 КОИ 18 ПЭВМ 10 из совокупности, поступающей из ПОИИ 19 практически непрерывной информации (1 Гц) от ИНС 1, СНС 2 и дискретной фотограмметрической информации (по всем фотокадрам полета), поступающей от АМФГМ 13, формируются векторы измерений, состоящие из поправок к координатам и скоростям самолета по осям платформы ИНС 1 при использовании информации от двух разнородных корректоров: СНС 2 и АМФГМ 13 и поправок в определении вертикали и курса по фотограмметрическим измерениям.
- в этом случае вектор измерений принимает вид:
Zk=[ΔSxcнci, ΔSycнci, ΔSxфгмj, ΔSyфгмj, ΔVxcнci, ΔVycнci, ΔVxфгмj,
ΔVyфгмj, θхфгмj, θyфгмj, θzфгмj],
где ΔSxcнci, ΔSycнci, ΔVxcнci, ΔVycнci - поправки соответственно по координатам и скоростям в осях платформы ИНС 1 по данным СНС 2;
ΔSхфгмj, ΔSуфгмj, ΔVхфгмj, ΔVуфгмj - поправки соответственно по координатам и скоростям в осях платформы ИНС 1 по данным АМФГМ 13;
θхфгмj, θуфгмj, θz фгмj - поправки в определении вертикали и курса ИНС 1 поданным АМФГМ 13;
(i→N, j→m, N>m).
- В блоке ОП ИНС 21 при использовании сформированных векторов измерений и комплексной обработки информации с помощью фильтра Калмана оцениваются погрешности ИНС 1, а именно совокупность параметров:
{ΔSx, ΔSy, ΔVx, ΔVy, θx, θy, θz, ωxx, ωxy, ωyz, ωyy, ωxn, ωyn, ωzn,
Δm1, Δm2};
где
ΔSx, ΔSy - составляющие погрешности ИНС 1 в определении координат (в горизонтальных осях платформы);
ΔVx, ΔVy - составляющие погрешности ИНС 1 в определении скоростей;
θх, θу, θz - угловые погрешности в определении вертикали и курса;
ωxx, ωxy, ωyz, ωyy - коэффициенты пропорциональности в составляющих скоростей дрейфов гироскопов, зависящих от ускорения;
ωxn, ωyn, ωzn - постоянные составляющие дрейфов гироскопов в осях приборного трехгранника;
Δm1, Δm2 - масштабные коэффициенты в погрешностях, зависящих от ускорения.
- в блоке ВНП 22 по оценкам погрешностей ИНС 1, полученным в ОП ИНС 21, и исходной инерциальной информации ПОИИ 19 вычисляется совокупность контрольных значений пространственно-угловых параметров ЛА при использовании избыточной информации от корректоров АМФГМ 13 и СНС 2 и угловых при использовании корректора АМФГМ 13.
При этом совокупность контрольных значений абсолютной высоты полета самолета вычисляются следующим образом:
где {ΔHj} - значения поправок к данным ВДС 4 или бароинерциальным измерениям высоты самолета в моменты фотографирования земной поверхности цифровым аэрофотоаппаратом;
Sp i {ΔHj} - интерполированные локальными кубическими сплайнами значения поправок на моменты регистрации ВДС 4 или бароинерциальной высоты (с частотой 1 Гц).
Вычисленные в блоке ВНП 22 значения параметров поступают в блок БД 23 КОИ 18. Значения параметров пространственно-угловой ориентации самолета, а именно совокупность контрольных значений:

где
φкi, λкi, Hкi - контрольные значения геодезических: широты, долготы и абсолютной высоты полета самолета;
ψкi, γкi, ϑкi - контрольные значения углов курса, крена и тангажа, согласно теории оптимальной комплексной обработки разнородной информации, должны обладать погрешностью меньшей или, по крайней мере, сопоставимой с погрешностью фотограмметрических измерений, при этом, сохраняя практическую непрерывность (1 Гц) контрольных значений пространственно-угловой ориентации ЛА на трассах испытаний ПНО.
В дальнейшем значения в БД 23 используются для сравнения при летных испытаниях с измерениями исследуемых ПНО:

где
{φпноi, λпнoi, Набс. пноi, γпноi, ϑпноi, ψпноi} - совокупность значений параметров пространственно-угловой ориентации исследуемого ПНО;
{Δφi, Δλi, ΔНабс.i, Δγi, Δϑi, Δψi} - оценки погрешностей измеренных параметров ПНО.
Оценки полученных погрешностей {Δφi, Δλi, ΔНабс.i, Δγi, Δϑi, Δψi} объединяются по критериям однородности и принадлежности одной и той же генеральной совокупности и проводится последующая статистическая обработка.
Пример 2.
Бортовая часть с установленными цифровым аэрофотоаппаратом и цифровым импульсным лазерным локатором функционирует следующим образом (фиг. 3):
- измеряемая информация о пространственно-угловых параметрах ЛА от ИНС(1), СНС(2), ВДС(4), БКС (ККС)(3) (если используется дифференциальный режим СНС), а именно совокупность значений:
где
φинсi, λинci, - значения координат широты, долготы, измеренные ИНС 1;
VNинci, VEинci - значения скорости по северному и восточному направлениям, измеренные ИНС 1;
ψинci, γинci, ϑинсi - значения угла курса, крена и тангажа самолета, измеренные ИНС 1;
φcнci, λснci, VNcнci, VEcнci - значения соответственно широты, долготы и скорости самолета по северному и восточному направлениям, измеренные СНС 2;
Н абс.i - значения (абсолютной) высоты полета самолета от ВДС 4 или бароинерциальных измерений;
ΔD1i, …, ΔDni - поправки в псевдодальности от n спутников СНС 2 от БКС (ККС) 3;
регистрируются (с частотой 1 Гц) на КБТИ-М 6;
- сигналы срабатывания затвора ЦАФА 4 с заданным интервалом (≥2 с) также регистрируется на КБТИ-М 6;
- цифровые фотоизображения местности в процессе полета на ЦАФА 5 записываются на электронные носители аэрофотоаппарата и могут быть размещены на флеш-накопителях;
- отраженные сигналы лазерных излучений ЦДЛ 24 регистрируются на временной шкале в КБТИ-М 6 (с частотой от 100 до 300 кГц);
- измеренные значения наклонной дальности лазерным лучом до земной поверхности, растительности и строений и значений угла, определяющего направление распространения зондирующего луча в системе координат локатора, записываются на электронный накопитель ЦДЛ 24 и могут быть размещены на флеш-накопителях.
Наземная часть системы, с установленными: цифровым аэрофотоаппаратом и цифровым импульсным лазерным локатором на борту, функционирует следующим образом (фиг. 4):
- цифровая информация аэрофотокадров и лазерное изображение местности крупного масштаба на район полетов, предварительно записанная на флеш-накопителях, вводится в ПЭВМ 10 и размещается в соответствующих файлах, а именно: ЦИАФ 11 и ЦЛИ 25;
- для каждой точки лазерного изображения в ВГК 26 вычисляются ее геодезические координаты и высота рельефа над уровнем моря:

где Di - значения измеренной наклонной дальности лазерным лучом до точки отражения;
αi, βi - углы отклонения лазерного луча от вертикали, функционально связанные с углами крена, тангажа и курса самолета, измеряемые ИНС 1 и значениями угла сканирующего луча локатора ЦЛЛ 24 в его системе координат;
φкоиj, λкоиj, Haбc.j - пространственные координаты самолета: широта и долгота, вычисленные в КОИ 18 КБТИ-М 6 при использовании инерциальной и спутниковой информации, а также значения абсолютной высоты полета от ВДС 4 или бароинерциальных измерений;
- для получения визуально адаптированного для восприятия изображения местности и строений лазерное изображение обрабатывается в блоке ОЛИ 27 по специальной программе;
- для фотограмметрической обработки цифровые изображения фотокадров из ЦИАФ 11 и адаптированное изображение лазерного ортофотоплана из ОЛИ 27 выводятся соответственно на ЛЧЭ 8 и ПЧЭ 9 ИМ 7;
- цифровые изображения фотокадров и лазерного ортофотоплана могут прокручиваться вверх и вниз по отношению к друг к другу и перемещаться влево и вправо для сопоставления изображений, их идентификации в различных масштабах изображения на фотокадрах и ортофотоплане для выбора одинаковых контуров или опорных точек местности на фотокадрах и ортофотоплане;
- последующее функционирование способа связано с измерениями на ЛЧЭ 8 и ЛЧЭ 9 ИМ 7 и вычислительным процессом в АМФГМ 13 и КОИ 18, таким же, как и при использовании цифровых карт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2543943C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| АВИАНАВИГАТОР | 2011 |
|
RU2457438C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
Изобретения относятся к области навигации летательных аппаратов (ЛА) и могут быть использованы для определения контрольных значений параметров пространственно-угловой ориентации ЛА при летных испытаниях пилотажно-навигационного оборудования (ПНО). Технический результат - расширение функциональных возможностей. Для этого при испытаниях ПНО осуществляют прием и обработку измерений инерциальной навигационной системы (ИНС), корректирование данных ИНС автономным средством и радионавигационное корректирование данных ИНС спутниковой навигационной системой (СНС) на основе базовой корректирующей станции (БКС) или контрольной корректирующей станции (ККС), измерения высоты полета воздушным датчиком или системой (ВДС), осуществляют аэрофотосъемку земной поверхности цифровым аэрофотоаппаратом, а также для формирования ортопланов при отсутствии топографических карт - лазерную съемку земной поверхности бортовым лазерным локатором. При этом для комплексной обработки информации (КОИ) в процессе и после полета, а именно, для предварительной обработки измерительной информации в блоке (ПОИИ), обеспечивают формирование векторов измерений (ФВИ) с контролем для защиты фильтра Калмана, оценки погрешностей ИНС (ОП ИНС) при использовании модифицированного фильтра Калмана, вычисления навигационных параметров (ВНП) с одновременным подключением к нему второго выхода блока ПОИИ. 2 н. и 2 з.п.ф-лы, 4 ил.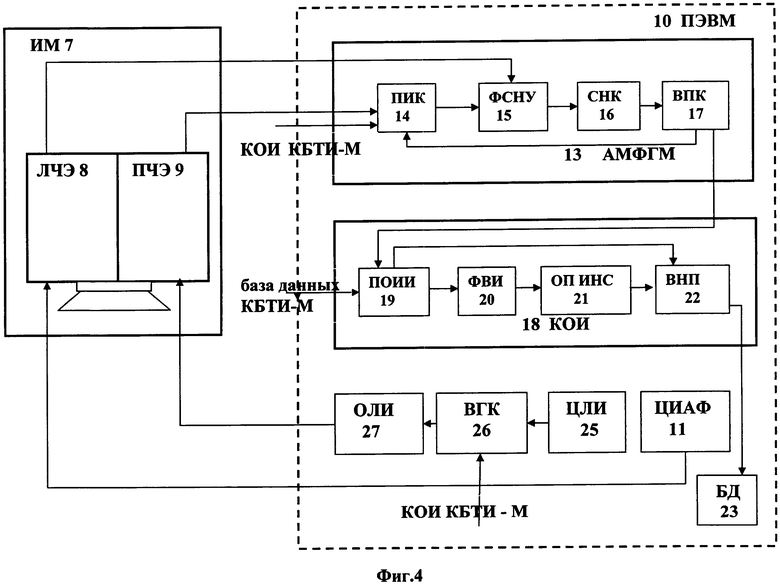
1. Способ определения контрольных значений параметров пространственно-угловой ориентации самолета на трассах и в приаэродромных зонах при летных испытаниях пилотажно-навигационного оборудования (ПНО), включающий измерения инерциальной навигационной системы (ИНС), корректирование данных ИНС автономным средством и радионавигационное корректирование данных ИНС спутниковой навигационной системой (СНС) в стандартном или в дифференциальном режиме работы с использованием базовой корректирующей станции (БКС) или контрольной корректирующей станции (ККС), измерения высоты полёта воздушным датчиком или системой (ВДС), сигналы которых регистрируются на модифицированном комплексе бортовых траекторных измерений (КБТИ-М) для комплексной обработки информации в системе (КОИ) в процессе полета, а именно для предварительной обработки измерительной информации (ПОИИ), формирования векторов измерений в блоке (ФВИ), оценки погрешностей инерциальной системы (ОП ИНС) при использовании модифицированного фильтра Калмана, вычисления навигационных параметров (ВНП) с одновременным подключением к нему второго выхода блока ПОИИ, а также наземную обработку исходной измеряемой информации от ИНС, СНС, БКС и данных ВДС, вычисление навигационных параметров (ВНП) с учетом измерительной информации, поступающей из ПОИИ, оценивание координат, получаемых по полётным данным, объединяемые по критериям однородности и принадлежности одной и той же генеральной совокупности и их статистическую обработку на персональной электронно-вычислительной машине (ПЭВМ), отличающийся тем, что на борту в полёте дополнительно производят аэрофотосъёмку земной поверхности с задаваемым интервалом фотографирования топографическим среднеформатным кадровым цифровым аэрофотоаппаратом (ЦАФА), при этом сигналы срабатывания затвора ЦАФА записываются на КБТИ-М для синхронизации фотокадров с информацией от ИНС, СНС и ВДС, фотокадры формируют в виде цифровых матриц изображений местности, которые записываются на электронные носители ЦАФА, после полёта производят фотограмметрическую обработку цифровых изображений фотокадров, размещенных в блоке цифровой информации аэрофотокадров (ЦИАФ) ПЭВМ при использовании цифровых топографических карт (ЦТК) местности крупного масштаба на зону полета, которые также представляются в цифровом формате и размещают в блоке ЦТК ПЭВМ с применением измерительного монитора (ИМ), экран которого разделен на левую и правую измерительные части для вывода соответствующих цифровых изображений фотокадров и топографических карт, их взаимной прокрутки, идентификации, выбора одних и тех же опознанных ориентиров или опорных точек на фотокадрах и карте местности, измеряют координаты этих точек на фотокадрах и топографических картах в масштабах их изображения с использованием измерительных марок или маркёров с учетом размеров и количества пикселей измерительного монитора, а параметры пространственно-угловой ориентации самолета в моменты срабатывания затвора ЦАФА определяют на ПЭВМ с помощью вычислительного блока аналитического метода фотограмметрии (АМФГМ), адаптированного к цифровым данным, используемого в качестве автономного корректора данных ИНС, при этом значения координат опорных точек, измеренных на ЦТК на правой части экрана (ПЧЭ) измерительного монитора (ИМ), поступают в блок преобразования измеренных координат (ПИК) АМФГМ, где происходит их последовательное преобразование из системы Гаусса-Крюгера через геодезические и геоцентрические координаты в горизонтальную систему координат, которые вместе со значениями координат изображений опорных точек на цифровом фотокадре (ЦИАФ), измеренными на левой части экрана (ЛЧЭ) ИМ поступают в блок формирования системы нормальных уравнений (ФСНУ), где происходит формирование системы уравнений поправок для опорных точек по вычисленным и измеренным координатам в фотографической системе аэрофотоснимка, для определения координат центра проекции фотокадра, функционально связанных с координатами центра масс самолета и углов внешнего ориентирования фотокадра, функционально связанных с углами крена, тангажа и курса самолета, достаточно трех опорных точек на фотокадре, при большем количестве точек формируют систему нормальных уравнений, в качестве первого приближения искомых координат пространственно-угловой ориентации фотокадров в блоке ФСНУ используют интерполированные на моменты срабатывания затвора ЦАФА значения координат и углового положения самолета, вычисленные в КОИ КБТИ-М по инерциальной и спутниковой информации и интерполированные значения абсолютной высоты полета от ВДС или от бароинерциальных измерений, при этом в блоке ПИК предварительно геодезические координаты самолета пересчитывают в горизонтальную систему координат, систему нормальных уравнений решают в блоке способа наименьших квадратов (СНК), вычисленные поправки из которого поступают в блок вычисления значений пространственных координат (ВПК) самолета при реализации итерационного процесса, для реализации которого выполняется обратная связь от блока ВПК на блок ПИК, где проводится преобразование координат центра фотокадра из горизонтальной системы в систему координат Гаусса-Крюгера, процесс итераций продолжается до тех пор, пока поправки к искомым параметрам станут меньше установленных допусков, значения параметров, вычисленные в ВПК в блоке АМФГМ для всего полета, а именно: широты, долготы, абсолютной высоты и углов курса, крена и тангажа самолета, которые затем используют как корректирующее средство инерциальной информации в КОИ ПЭВМ, для чего фотограмметрическая информация по всем фотокадрам, полученным в полете, поступает в блок предварительной обработки измерительной информации (ПОИИ) КОИ одновременно с информацией от инерциальной системы, спутниковой навигационной системы и ВДС, поступающей из базы данных КБТИ-М, в блоке ФВИ формируют векторы измерений по спутниковой и фотограмметрической информации, состоящие из поправок к координатам и скоростям самолёта по осям платформы ИНС и поправок к вертикали и курсу ИНС только по фотограмметрической информации, в блоке ОП ИНС определяют погрешности инерциальной системы с помощью фильтра Калмана, а практически непрерывные значения контрольных пространственно-угловых параметров самолета в зоне испытаний ПНО определяют в блоке вычисления навигационных параметров (ВНП) КОИ ПЭВМ с учётом поступающей измерительной информации из блока ПОИИ, погрешность параметров, определяемых в блоке ВНП, сопоставима с погрешностью точных фотограмметрических измерений, вычисленные контрольные значения пространственно-угловой ориентации самолета записываются в базу данных контрольных значений ПЭВМ, затем сравнивают их с измеренными значениями аналогичных параметров других испытываемых ПНО и анализируют их погрешности, объединённые по критериям однородности и принадлежности одной и той же генеральной совокупности для проведения последующей статистической обработки.
2. Способ определения контрольных значений параметров пространственно-угловой ориентации самолета на трассах и в приаэродромных зонах при летных испытаниях пилотажно-навигационного оборудования по п. 1, отличающийся тем, что при отсутствии цифровой топографической карты местности используют лазерный ортофотоплан местности, для чего на борт дополнительно устанавливают импульсный цифровой лазерный локатор (ЦЛЛ), с помощью которого в процессе полета проводится лазерная съемка земной поверхности, информация от которого: лазерное изображение местности (ЦЛИ), значения измеренной наклонной дальности и угла, определяющего направление распространения зондирующего луча в системе координат локатора, записываются на электронные носители локатора, а затем могут быть представлены на флеш-накопителях, а моменты прихода отраженных сигналов от земной поверхности, существующих строений регистрируются на КБТИ-М для последующей синхронизации с инерциальной, спутниковой информацией и данных ВДС, при этом в послеполетной обработке на ПЭВМ по бортовым измерениям наклонной дальности, углов отклонения лазерного луча от вертикали и координатам самолета, вычисленным на борту при комплексной обработке инерциальной и спутниковой информации в КБТИ-М, создается ортофотоплан местности на зону полёта в геодезической системе координат (ВГК), для получения визуально адаптированного для восприятия изображения местности и существующих строений лазерное изображение обрабатывается при использовании специальной программы (ОЛИ), а последующая фотограмметрическая обработка проводится с фотокадрами и лазерным ортофотопланом с использованием ИМ и ПЭВМ.
3. Система для определения контрольных значений параметров пространственно-угловой ориентации самолета на трассах и в приаэродромных зонах при летных испытаниях пилотажно-навигационного оборудования, содержащая бортовую и наземную части измерительной системы: включающая в бортовую часть - инерциальную навигационную систему (ИНС), приемник спутниковой навигационной системы (СНС), в стандартном или в дифференциальном режиме работы, радиосвязанной с наземной базовой корректирующей станции (БКС) или контрольной корректирующей станции (ККС), воздушный датчик или систему (ВДС), модифицированный комплекс бортовых траекторных измерений (КБТИ-М), отдельно подключённый выходами к входам системы комплексной обработки информации радионавигационных и автономных средств навигации самолёта (КОИ), а именно к входам блока предварительной обработки измерительной информации (ПОИИ), выход которого соединён с последовательно связанными блоком формирования векторов измерений (ФВИ), блоком оценки погрешностей ИНС (ОП ИНС) при использовании модифицированного фильтра Калмана, блоком вычисления навигационных параметров (ВНП) с одновременным подключением к нему второго выхода блока ПОИИ, в наземную часть - базовую корректирующую станцию (БКС) или контрольную корректирующую станцию (ККС), персональную электронную вычислительную машину (ПЭВМ), с сформированными в ней системой комплексной обработки информации (КОИ), автономным корректором данных ИНС, флеш-накопителем для формирования базы данных, отличающаяся тем, что на борту самолёта установлен топографический цифровой кадровый аэрофотоаппарат (ЦАФА) с измеряемыми установочными углами по основным строительным осям самолёта, коммутация сигналов срабатывания затвора ЦАФА связана со входом модифицированного комплекса КБТИ-М, соответственно, в наземной части включены блок цифровой информации аэрофотокадров (ЦИАФ) и блок цифровых данных топографических карт (ЦТК) в базу данных ПЭВМ, дополнительно установлен измерительный монитор (ИМ), экран которого разделен на две измерительные части, входы левой и правой частей соединены соответственно с выходами ЦИАФ и ЦТК; ПЭВМ сформирована с автономным корректором данных ИНС в виде вычислительного блока аналитического метода фотограмметрии (АМФГМ), содержащим последовательно связанные: блок преобразования измеренных координат точек (ПИК) из системы Гаусса-Крюгера в горизонтальную систему координат и обратно; блок формирования системы нормальных уравнений (ФСНУ), количество опорных точек должно быть больше трёх; блок решений сформированной системы нормальных уравнений способом наименьших квадратов (СНК) для определения поправок к приближённым координатам центра проекции фотокадра и поправок к углам внешней ориентации фотокадра, функционально связанных через установочные углы аэрофотоаппарата с углами курса, крена и тангажа самолёта; блок итерационного вычисления пространственных координат (ВПК) пространственно-угловой ориентации самолета на моменты срабатывания затвора ЦАФА, первый выход которого подключен через обратную связь ко второму входу ПИК, а второй выход подключён к первому входу блока ПОИИ КОИ ПЭВМ, третий вход ПИК соединён с выходом КОИ КБТИ-М, размещённым в ПЭВМ, для использования в расчетах в качестве первого приближения координат центра проекции фотокадра и его углового положения, интерполированных на моменты срабатывания затвора ЦАФА; выходы двух измерительных частей монитора левого ЛЧЕ и правого ПЧЭ соответственно соединены со вторым входом блока ФСНУ и первым входом в блок ПИК; второй вход блока ПОИИ связан с флеш-накопителем базы данных КБТИ-М по инерциальной, спутниковой информации и данных ВДС, а выход ПОИИ через блок формирования векторов измерений по спутниковой и фотограмметрической информации (ФВИ), состоящей из поправок к координатам и скоростям самолёта по осям платформы ИНС и поправок к вертикали: углам крена, тангажа и к курсу ИНС только по данным АМФГМ, связан с блоком определения оценки погрешностей ИНС (ОП ИНС), выход которого с одновременным подключением второго выхода блока ПОИИ, соединены с блоком ВНП-вычислителем контрольных значений пространственно-угловой ориентации: значений геодезических координат, абсолютной высоты и углов крена, тангажа и курса самолета при использовании информации от корректоров АМФГМ и СНС, связанным с входом блока базы данных контрольных значений ПЭВМ.
4. Система для определения контрольных значений параметров пространственно-угловой ориентации самолета на трассах и в приаэродромных зонах при летных испытаниях пилотажно-навигационного оборудования по п.3, отличающаяся тем, что при отсутствии цифровой топографической карты местности используют цифровой лазерный ортофотоплан местности, для чего дополнительно на борту устанавливают цифровой импульсный лазерный локатор (ЦЛЛ), временная шкала измерений которого связана со входом КБТИ-М, соответственно, в наземную часть системы ПЭВМ введены блок данных цифровых лазерных изображений (ЦЛИ), координаты и угловые положения самолёта, вычисленные в КОИ КБТИ-М, связанный с их выходами блок вычисления геодезических координат точек лазерного изображения местности по измеренным наклонным дальностям, углам отклонения от вертикали лазерного луча и координатам самолета (ВГК), выход которого через блок обработки лазерных изображений (ОЛИ) связан с входом правой части экрана (ПЧЭ) измерительного монитора для получения визуально-адаптированного изображения местности, а вход левой части (ЛЧЭ) соединён с выходом ЦИАФ.
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
| РИВКИН С.С | |||
| Теория гироскопических устройств", часть 1-я, Судпромгиз, Ленинград, 1962, с.273-275 | |||
| Исследование систем и датчиков ПНО | |||
| Летные исследования и испытания | |||
| Фрагменты истории и современное состояние | |||
| Научно-технический сборник/ П.И | |||
| ВЛАСОВ и др | |||
| М.: Машиностроение, 1993, с | |||
| Разборное колесо | 1921 |
|
SU370A1 |

