Способ трассировки маршрута движения автоматического транспортного средств (АТС) относится к способам организации движения автоматически управляемых транспортных средств, и может быть использован в любой отрасли народного хозяйства для автоматизированных перевозок различных грузов и пассажиров.
Трассировка - процесс описания маршрута и его особенностей, например, нанесенной дорожной разметки, связанных с изменением режима движения транспортных средств (ТС), соотносящиеся с изменением рельефа маршрута (углов наклона или подъема ТС на дорожном полотне, что в авиации называется углами тангажа) и его пространственного направления в плоскости движения ТС по дорожному полотну (что в авиации называется углами рыскания, в том числе и от случайных факторов, произвольных, вызванных наличием люфтов в соединениях деталей рулевых механизмов ТС или неровностями на дорожном полотне).
Известен способ трассировки маршрута движения (см. патент США №US 5097329 «Process for judging a runway», заявитель HONDA MOTOR CO LTD (HONDA GIKEN KOGYO KABUSHIKI KAISHA), опубл. 17. 03.1992), включающий получение изображения маршрута на двумерном отображении изображения, его обработку путем применения математического метода с использованием операторов Собеля, позволяющих получить градиентные границы, и на их основе оценивают изменение пространственной формы дорожного маршрута.
При этом сложно соотнести линейные размеры маршрута и их пространственное положение особенно с учетом возможности наличия на нем уклонов или подъемов. Полученные таким путем данные о дорожном маршруте сложно использовать для управления движением автономного ТС, так как будет сложно определить его пространственное положение и прогнозировать его длительное движение. При этом для длительного движения необходимо анализировать большой объем графической информации.
Известен способ оценки маршрута движения (см. патент США №US 5379353 «Apparatus and method for controlling a moving vehicle utilizing a digital differential analysis circuit», заявитель HONDA MOTOR CO LTD (HONDA GIKEN KOGYO KABUSHIKI KAISHA), опубл. 03.01.1995) включающий получение изображения маршрута на двумерном отображении изображения, его обработку путем применения математического метода с использованием преобразования Хафа или преобразования Хока и получения прямых или иных линий на указанном изображении, описывающих форму дорожного маршрута.
Основным недостатком известного способа является то, что он сложен в реализации из-за большого объема математических операций и полученные таким путем данные о дорожном маршруте сложно хранить и использовать для управления движением ТС, так же будет сложно определить его пространственное положение на дорожном маршруте.
Известен способ оценки маршрута движения (см. патент США №US 8224031 «Road line recognition apparatus», заявитель SAITO TORU; FUJI HEAVY IND LTD (SAITO TORU, FUJI JUKOGYO KABUSHIKI KAISHA) опубл. 17.07.2012) включающий получение с основной стерео камеры стерео кадров, их преобразование путем использования аффинного преобразования для выполнения коррекции изображения.
Метод очень сложный и требует исключительно сложного и дорогостоящего оборудования.
Известен способ оценки маршрута движения автоматического транспортного средства, включает сканирование дорожного полотна, имеющего разметку, по меньшей мере, одним линейным фоточувствительным прибором (ЛФП), с одновременным определением углового размера контрастных элементов и расстояния до них и их границ, соответственно ЛФП направленным на участки дорожного полотна, расположенные на различном расстоянии от ТС (см. заявку США №, US 2013202155, заявитель KARANAM GOPAL GUDHUR, опубл. 08.08.2013) включающий определение математическими методами границ.
Основным недостатком известной конструкции для реализации способа является сложность использования и потребность в больших вычислительных возможностях бортового компьютера.
Известен способ оценки маршрута движения (см. патент США №9047518, METHOD FOR THE DETECTION AND TRACKING OF LANE MARKINGS, заявитель DELPHI TECHNOLOGIES, INC), опубл. 02.06.2015) включающий получение методом XAAPa структуры разметки.
Известный метод сложен и требует больших вычислительных возможностей бортового компьютера.
Известен способ оценки маршрута движения (см. патент США №8462988, METHOD AND SYSTEM FOR UNIVERSAL LANE BOUNDARY DETECTION, заявитель VALEO SCHALTER UND SENSOREN GMBH и BOON CATHY, опубл. 06.11.2013) включающий вычисление расстояние до элементов разметки и их истинных размеров в виде двух мерной матрицы. В которой происходит поиск элементов полосы движения и определение возможности аварийного выхода из нее и корректирования положения ТС на дорожном полотне.
Основным недостатком способа является обработка двумерных матриц (аналогов визуального кадра) для выявления элементов разметки. Это требует большой оперативной памяти устройства и высокопроизводительного процессора, так как двумерные матрицы (визуальные кадры) меняются с большой частотой, соразмерной с частотой развертки и смены кадра.
Известен способ оценки маршрута движения (см. патент США №5835028, Lane marker position sensor and alarm, заявитель BENDER, LEE, WOOD, J. RODGER, опубл. 10.11.1998) включающий накопление сканов в реальном размере дорожного полотна, необходимых для создания изображения дорожного полотна из линейны сканов и последующего сравнения их с реальным изображением, получаемым с видео камеры.
Предложенный способ требует компьютера с большой производительностью для сравнения реальных изображений, получаемых из видео камеры с формируемым из сканов изображением.
Известен способ оценки маршрута движения и управления автоматическим ТС (см. патент США №. 5414625, System and method for providing steering control for autonomous vehicle, заявитель NISSAN MOTOR CO., LTD, опубл. 1995-05-09) включающий на основании имеющихся сканов построение и нанесение на дорожный маршрут направляющей линии, по которой совместно с разметкой полосы движения происходит автоматическое управление ТС.
Основным недостатком известного способа управления является необходимость нанесения дополнительной направляющей линии. Это значительно усложняет процесс управления и подготовки транспортного маршрута.
Известен способ трассировки маршрута движения автоматического транспортного средства, (см. патент США US 8755997 А1, заявитель HONEYWELL INTERNATIONAL INC, опубл. 17.06.2014) который включает непрерывное сканирование дорожного полотна лазерным сканером, имеющего дорожную разметку, по меньшей мере, двумя фоточувствительными приборами (ФП), установленными на транспортном средстве (ТС) располагаемыми на заданной высоте над дорожным полотном, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, преобразуют элементы изображения в единый одинаковый размер, получают смасштабированное непрерывное изображения дорожного полотна, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, например методом RANSAC (процесс консенсуса случайной выборки), выявляют элементы дорожной разметки, определяют положение осевой линии дорожного полотна и элементов разметки на сканах и оценивают их пространственную форму, а по положению в пространстве элементов дорожной разметки и осевой линии, определяют положение и отклонение ТС на полосе движения, при необходимости корректируют соответствующий скан, полученные данные записывают в долговременную память.
Основным недостатком известного способа является сканирование поверхности дорожного полотна лазерным лучом методом построчечной развертки. Узкий лазерный луч охватывает малую часть поверхности. При этом или требуется слишком большой объем памяти для хранения информации об отсканированной поверхности дорожного полотна или информация о ней будет частичной с пропусками между зигзагообразными проходами лазерного луча.
Известен способ трассировки маршрута движения автоматического транспортного средства, (см. опубликованную заявку США US 8723660, заявитель AUTOMOTIVE RESEARCH & TEST CENTER, опубл. 13.05.2014) который включает непрерывное сканирование дорожного полотна, имеющего дорожную разметку, по меньшей мере, двумя фоточувствительными приборами (ФП), установленными на транспортном средстве (ТС) располагаемыми на заданной высоте над дорожным полотном и соответственно направленными на два разных участка дорожного полотна, расположенные на двух различных расстояниях от ТС, соответственно ближнем и дальнем, полученные синхронно фоточувствительными приборами изображения математически обрабатывают по методу Собеля, выявляют элементы дорожной разметки, определяют положение осевой линии дорожного полотна и элементов разметки на сканах, а по положению в пространстве элементов дорожной разметки и осевой линии, определяют положение и отклонение ТС на полосе движения, при необходимости корректируют соответствующий скан, а полученные данные записывают в долговременную память.
Недостатком известного способа является невозможность определения пространственной формы дорожного полотна.
Известен способ трассировки маршрута движения автоматического транспортного средства, (см. патент США US 8422736, заявитель TOMTOM GLOBAL CONTENT B.V, опубл. 16.04.2013), который включает непрерывное сканирование дорожного полотна, имеющего дорожную разметку, по меньшей мере, двумя фоточувствительными приборами (ФП), установленными на транспортном средстве (ТС) располагаемыми на заданной высоте над дорожным полотном, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, преобразуют элементы изображения в единый одинаковый размер, получают смасштабированное непрерывное изображения дорожного полотна, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, например методом ортотрансформирования, выявляют элементы дорожной разметки, определяют положение осевой линии дорожного полотна и элементов разметки на сканах и оценивают их пространственную форму, а по положению в пространстве элементов дорожной разметки и осевой линии, определяют положение и отклонение ТС на полосе движения, при необходимости корректируют соответствующий скан, а полученные данные записывают в долговременную память.
Основным недостатком известного способа является сложный для реализации способ геокодированного ортотрансформированного преобразования изображений и привязка их реальному дорожному полотну путем использования инструмента, который представляет собой одометр, измеряющий расстояние, пройденное автомобилем путем измерения количества оборотов одного или нескольких колес.
Известен способ трассировки маршрута движения автоматического транспортного средства, (см. патент США US 8594380 B2, заявитель NEC CORPORATION, опубл. 26.11.2013), который включает непрерывное получение изображения дорожного полотна, имеющего дорожную разметку, по меньшей мере, двумя фоточувствительными приборами (ФП), установленными на транспортном средстве (ТС) располагаемыми на заданной высоте над дорожным полотном, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, выявляют элементы дорожной разметки, определяют положение осевой линии дорожного полотна и элементов разметки на сканах и оценивают их пространственную форму, по положению в пространстве элементов дорожной разметки и осевой линии, определяют положение и отклонение ТС на полосе движения, при необходимости корректируют соответствующий скан, а полученные данные записывают в долговременную память.
Известный метод является очень сложным и требует дорогостоящего специализированного аппаратного оборудования и программного обеспечения.
Известен способ трассировки маршрута движения автоматического транспортного средства, (см. патент США №8364334, заявитель HONEYWELL INT INC, опубл 29.01.2013) который включает непрерывное сканирование дорожного полотна, имеющего дорожную разметку, по меньшей мере одним лазерным локатором, установленным на транспортном средстве (ТС) располагаемыми на заданной высоте над дорожным полотном и соответственно направленными на участок дорожного полотна, полученные сканы математически обрабатывают, преобразуют элементы изображения в единый одинаковый размер, получают смасштабированное непрерывное изображения дорожного полотна, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, выявляют элементы дорожной разметки, определяют положение осевой линии дорожного полотна и элементов разметки на сканах и оценивают их пространственную форму, по положению в пространстве элементов дорожной разметки и осевой линии, определяют положение и отклонение ТС на полосе движения, при необходимости корректируют соответствующий скан, а полученные данные записывают в долговременную память.
Основным недостатком известного способа является узкий лазерный луч сканирования, требующий достаточной частоты развертки, и при движении с определенной скоростью частоты развертки будет недостаточно для получения полного изображения дорожного полотна. Кроме этого постоянное измерение и запись данных сканирования, таких как дальность расположения каждой точки сканируемой поверхности требует большого объема оперативной и долговременной памяти процессора и для построения формы поверхности потребуется процессор с большой производительностью.
Известен способ трассировки маршрута движения автоматического транспортного средства и оценки состояния дорожного полотна и обнаружения предметов на нем, (см. патент США №8723660, DUAL-VISION DRIVING SAFETY WARNING DEVICE AND METHOD THEREOF, заявители CHEN YU-SUNG, SU YI-FENG, CHEN CHIA-TSENG и AUTOMOTIVE RESEARCH & TEST CENTER, опубл. 13.05.2014), который включает непрерывное сканирование дорожного полотна, имеющего дорожную разметку, по меньшей мере, двумя фоточувствительными приборами (ФП), установленными на транспортном средстве (ТС) располагаемыми на заданной высоте над дорожным полотном и соответственно направленными на два разных участка дорожного полотна, расположенные на двух различных расстояниях от ТС, соответственно ближнем и дальнем, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, например методом Собеля, выявляют элементы дорожной разметки, и по динамическому изменению размеров предмета, движущегося относительно ТС, по сравнению со стандартными элементами разметки и попаданию его в зону ближнего ФП определяют опасность ситуации.
Основным недостатком известного способа является получение и анализ каждой двумерной матрицы пиксельного изображения скана, что приводит к большому объему анализируемой визуальной информации. При этом способ не учитывает реальный профиль и форму дорожного полотна, то есть отклонение реального положения сканов и разметки дорожного полотна в реальности на различном расстоянии от каждого из двух фоточувствительных приборов, так как оценка расстояний проводится приблизительными методами, на пример по углу схождения в перспективе положения элементов разметки и это приводит к невозможности учета пространственной формы дорожного полотна и из-за отклонения реального расстояния до элементов дорожной разметки от идеализированного расчетного получается незапланированная ошибка в определении расстояний и размеров дорожной разметки, так как при одном и том же угле сканирования реальное расстояние до разметки может отличаться от расстояния по горизонтали.
Известен способ трассировки маршрута движения автоматического транспортного средства, (см. патент США US 8755997 B2, заявитель HONEYWELL INT INC, опубл. 17.06.2014) который включает непрерывное сканирование дорожного полотна, имеющего дорожную разметку, по меньшей мере, двумя фоточувствительными приборами (ФП), установленными на транспортном средстве (ТС) располагаемыми на заданной высоте над дорожным полотном, полученные фоточувствительными приборами изображения математически обрабатывают, преобразуют элементы изображения в единый одинаковый размер, получают смасштабированное непрерывное изображения дорожного полотна, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, например методом RANSAC, выявляют элементы дорожной разметки, определяют положение осевой линии дорожного полотна и элементов разметки на сканах и оценивают их пространственную форму.
На основании обработки данных методом RANSAC определяют пространственную форму дорожного полотна. Известный метод требует большого числа математических действий, что не всегда возможно обработать с достаточной быстротой, из-за необходимости использования большого объема постоянной памяти ЭВМ. Это затрудняет оперативное использование полученных данных в реальной практике управления движением автономного TC.
Известен способ трассировки маршрута движения автоматического транспортного средства, (см. опубликованную заявку США US 2013202155 A1, заявитель KARANAM GOPAL GUDHUR, опубл. 08.08.2013) который включает непрерывное сканирование дорожного полотна, имеющего дорожную разметку, по меньшей мере, двумя фоточувствительными приборами (ФП), установленными на транспортном средстве (ТС) располагаемыми на заданной высоте над дорожным полотном и соответственно направленными на два разных участка дорожного полотна, расположенные на двух различных расстояниях от ТС, соответственно ближнем и дальнем, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, преобразуют элементы изображения в единый одинаковый размер, получают смасштабированное непрерывное изображения дорожного полотна, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, например методом Хафа, выявляют элементы дорожной разметки, определяют положение осевой линии дорожного полотна и элементов разметки на сканах и оценивают их пространственную форму, а по положению в пространстве элементов дорожной разметки и осевой линии, определяют положение и отклонение ТС на полосе движения, при необходимости корректируют соответствующий скан, а полученные данные записывают в долговременную память.
Основным недостатком является отсутствие синхронизации полученных сканов по времени и их расположения в пространстве, что не позволяет однозначно определить величину, размеры и форму в пространстве дорожного полотна и разметки на нем из-за отсутствия точной привязки их взаимного положения в пространстве.
Известен способ трассировки маршрута движения автоматического транспортного средства, (см. патент США №.7415335, Mobile data collection and processing system and methods, заявитель HARRIS CORPORATION, опубл. 19.08.2008), который включает непрерывное сканирование дорожного полотна, имеющего дорожную разметку, по меньшей мере, двумя линейными фоточувствительными приборами (ФП), установленными на транспортном средстве (ТС), располагаемыми на заданной высоте над дорожным полотном, при этом дополнительно определяют полученные синхронно фоточувствительными приборами изображения математически обрабатывают, преобразуют в стерео пару с элементами изображения в едином одинаковом смаштабированным размере, получают смасштабированное непрерывное изображения дорожного полотна, полученные синхронно фоточувствительными приборами изображения математически обрабатывают, выявляют элементы дорожной разметки, определяют положение осевой линии дорожного полотна и элементов разметки на сканах и оценивают их пространственную форму, а по положению в пространстве элементов дорожной разметки и осевой линии, определяют положение и отклонение ТС на полосе движения, при необходимости корректируют соответствующий скан, а полученные данные записывают в долговременную память в виде изображений линейного сканирования и связанных с ними соответствующих им данных о их пространственном положении и времени сканирования.
Основным недостатком известного способа является весьма сложный метод определения формы поверхности дорожного полотна по методу стерео пары, так как используется при этом сложная процедура фотограмметрии (см. изображений линейного сканирования и связанных с ними данных о их пространственном положении и времени сканирования требуют большого объема оперативной и долговременной памяти ЭВМ.
Известный способ имеет наибольшее число совпадающих и/или аналогичных действий, а также наиболее близок по достигаемому техническому результату и решаемой задаче. По этой причине принимаем его в качестве прототипа.
Задачей предлагаемого способа является упрощение процесса и повышение качества трассировки и последующего управления ТС на дорожном полотне в условиях воздействия помех от света, отраженного от блестящей поверхности, например, растаявшего битума, воды, стекла и т.п., а также при изменении формы и пространственного положения дорожного полотна, в том числе количества полос движения на нем, появления уклонов, подъемов, ответвлений, изменения направления и т.д.
При решении задачи техническими средствами достигаются нижеследующие технические результаты.
Как и в известном способе трассировки маршрута движения автоматического транспортного средства, который принят нами в качестве прототипа, при котором проводят непрерывное сканирование дорожного полотна с дорожной разметкой, по меньшей мере, двумя линейными фоточувствительными приборами (ЛФП), установленными на транспортном средстве (ТС) располагаемыми на заданной высоте над дорожным полотном и соответственно направленными на два разных участка дорожного полотна, расположенные на двух различных расстояниях от ТС, соответственно ближнем и дальнем, позиционированных в пространстве и привязанных к их положению относительно дорожного полотна, полученные синхронно линейными фоточувствительными приборами изображения обрабатывают геометрически, то есть преобразуют элементы изображения в единый одинаковый размер, получают смасштабированное в едином масштабе непрерывное изображение дорожного полотна, полученные синхронно фоточувствительными приборами смасштабированное изображение повторно математически обрабатывают, выявляют такие элементы сканирования, как осевая линия дорожного полотна, сплошные, прерывистые или иные линии дорожной разметки, границы дорожного полотна и границы сканирования, определяют положение элементов сканирования и оценивают их пространственную форму, по положению относительно линейных фоточувствительных приборов (ЛФП) в пространстве элементов дорожной разметки и осевой линии и других элементов сканирования, определяют положение и отклонение ТС на полосе движения, при необходимости корректируют положение ТС и полученные данные записывают в долговременную память в виде изображений линейного сканирования и связанных с ними соответствующих им данных о их пространственном положении и времени сканирования. Фоточувствительные приборы в виде ЛФП выбраны не случайно, так как прямоугольная ПЗС матрица (матричный фотопреобразующий прибор с зарядовой связью) имеет не рациональное расположение фоточувствительных элементов, требующее при сканировании пилообразной строчечной развертки процесса снятия сигнала с нее. Линейное расположение фоточувствительных элементов ЛФП позволяет повысить плотность их расположения в линейной ПЗС матрице и соответственно увеличить разрешающую способность линейных фоточувствительных приборов при заданной частоте сканирования или развертки, или даже синхронную параллельную съемку сигнала со всех фоточувствительных элементов ЛФП одновременно.
Предложенный способ имеет отличительные от прототипа действия, которые позволяют решить поставленную техническую задачу путем использования новых действий и достичь новых технических результатов.
При реализации предложенного способа трассировки маршрута движения автоматического транспортного средства, проводят следующие действия.
Линейные фоточувствительные приборы (ЛФП) устанавливают на гиростабилизированную платформу, что позволяет исключить помехи от изменения положения ТС по тангажу (изменению положения в вертикальной плоскости) и рысканию (то же в горизонтальной плоскости) во время движения по дорожному полотну, например, из-за его неровностей или других его дефектов или других случайных факторов.
Определяют лазерным дальномером реальное эталонное или рассчитывают эталонное положение кратчайшего расстояния до сканируемой поверхности по выбранному эталонному положению ТС на дорожном полотне для обоих сканов. Такое эталонное положение выбирают или рассчитывают, исходя из условия расположения гиростабилизированной платформы над ровной горизонтальной поверхностью дорожного полотна.
За эталонное положение ТС может быть выбрано любое определенное его положение на дорожном полотне, например, строго по осевой линии дорожного полотна или на выбранной полосе движения ТС. Для эталонного положения ЛФП определяют или рассчитывают кратчайшее расстояние до плоскости сканирования.
В реальных условиях ближний фоточувствительный прибор, направляют перпендикулярно к дорожному полотну и определяют его эталонное положение, отклонение от гировертикали, определяют реальную высоту ЛФП над дорожным полотном,
При этом реальное расстояние до дорожного полотна ближнего скана может быть равным эталонному при горизонтальном положении реального дорожного полотна. При незначительных отклонениях его от гировертикали и изменении реального расстояния, в пределах ошибки измерения можно не учитывать изменение этой величины.
Дальний ЛФП направляют под заданным эталонным углом к горизонтали.
Перед началом движения ТС расстояние между ближним и дальним сканами по направлению осевой линии разбивают на равные или пропорциональные участки.
При этом за нулевую отметку соответственно принимают положение ближнего скана перед началом движения ТС;
Проводят эталонное сканирование одного участка.
Одновременно со сканированием дальним фоточувствительным прибором методом лазерного дальномера определяют расстояние до границ сканирования, и других элементов сканирования дорожного полотна в плоскости сканирования, геометрически обрабатывают полученное изображение и геометрически приводят к единому масштабу, которое проводится на основе тригонометрических соотношений. Это действие упрощает дальнейшие математические преобразования и уменьшает пространственные искажения, например, из-за перспективного расположения элементов сканирования, то есть изображения элементов сканирования двух сканов ближнего и дальнего, наблюдаемых под разными углами с учетом реального изображения в перспективе.
Повторно математически обрабатывают и получают два смасштабированных в едином масштабе, непрерывных эталонных изображения участка дорожного полотна с элементами сканирования. В смасштабированном изображении синхронно полученном фоточувствительными приборами выявляют элементы сканирования, например, линии дорожной разметки. Эталонное сканирование эталонного участка позволяет сравнить и проверить соответствие размеров смасштабированных стандартных элементов разметки на дорожном полотне и скорректировать масштабы для ближнего и/или дальнего сканов, если указанные размеры значительно отличаются.
При этом все элементы сканирования математически выявляются на обоих сканах при помощи известных математических методов, например, методом Собеля, Хаара, Хафа или другими.
Проводят реальное сканирование дорожного полотна с элементами дорожной разметки для трассировки пути движения автоматического транспортного средства.
На обоих сканах ближнем и дальнем эталонного и реального сканирования каждого участка ставят синхронизированные отметки времени. При этом синхронизированные отметки позволяют описать для обоих сканов дополнительные условия, в которых производилась съемка, например, реальные погодные условия, уровень естественной освещенности по времени суток и т.д. При этом отметки не занимают много места в памяти бортовой ЭВМ.
На обоих сканах ближнем и дальнем эталонного и реального сканирования каждого участка ставят отметки пространственного положения. Это позволяет сравнивать одинаковые участки, полученные ближним и дальним ЛПФ.
Предпочтительно указанные отметки ставить синхронно по границам выбранных участков, а участки - выбирать одинаковой длины.
Определяют реальное положение элементов сканирования в смасштабированном размере относительно осевой линии дорожного полотна, сравнивают с эталонными значениями и определяют изменение положения в процессе движения и сканирования;
По указанным реальным данным, обработанным геометрически и математически, например, методом Собеля, выявляют границы реальных элементов дорожной разметки, что позволяет однозначно определить границы сканируемых элементов дорожной разметки, а по их стандартным размерам и взаимному положению, которое регулируется и устанавливается нормативными документами, например, такими как ГОСТ Р 51256-2011 (Технические средства организации дорожного движения. Разметка дорожная. Классификация. Технические требования), Правила Дорожного Движения, СНИПы, Правила строительства дорожных сооружений и т.д., выявить и исключить вносящие ошибку дефекты дорожного полотна.
Контроль пространственного положения ТС при его движении осуществляют любым известным способом с помощью любых известных устройств или других средств, например, для этого могут быть использованы любые известные инерциальные (см. Патент №2335805 РФ, заявители Бузников С.Е., Елкин Д.С. Опубл. 10.10.2008, Или Патент РФ №2513439, заявители Бузников С.Е., Шабанов Н.С. Опубл. 20.04.2014, Бюл. №11.) или спутниковые, такие как GPS и/или ГЛОНАСС, системы определения пространственного положения ТС.
Полученные одинаковые по положению в пространстве участки сканов сравнивают и контролируют ошибки сканирования,
Определяют реальное положение элементов сканирования в смасшабированом размере относительно кратчайшего расстояния до плоскости сканирования дальнего скана и осевой линии дорожного полотна, сравнивают с эталонными значениями и определяют изменение положения в процессе движения и сканирования.
Определяют на ближнем скане положение пересечения его с осевой линией, определяют отклонение направления движения реального положения ТС относительно осевой линии, при необходимости корректируют его положение на дорожном полотне, что значительно упрощает анализ и управление движением осуществляющего трассировку ТС. Это позволяет оперативно исправить случайное рыскание ТС по дорожному полотну.
По изменению кратчайшего расстояния до дальнего скана в его сравнении с расчетным расстоянием, полученным из условия горизонтального и прямого дорожного полотна, определяют уклон или подъем дорожного полотна в вертикальной плоскости. По эталонному определенному перед началом движения определяют реальное или расчетное кратчайшее расстояние до плоскости сканирования, полученное при заданном эталонном угле наклона к горизонтали. По изменению отклонения величины кратчайшего расстояния до дальнего скана (при увеличении определяют уклон, а при уменьшении - подъем) определяют изменение формы дорожного полотна в вертикальной плоскости,
При перемещении вправо или влево точки кратчайшего расстояния в дальнем скане относительно точки пересечения с осевой линией, то есть по изменению положения точки пересечения кратчайшего расстояния с плоскостью сканирования относительно пересечения с осевой линией дорожного полотна определяют изменение направления дорожного полотна (направление поворота). Направление смещения точки пересечения с осевой линией указывает направление поворота дорожного полотна в горизонтальной плоскости. Осевая линия дорожного полотна обычно располагается симметрично с учетом суммарной ширины дорожного полотна, в которую должны входить все постоянно присутствующие элементы дорожного полотна или только реально исследуемых полос движения. Положения осевой линии и других элементов сканирования математически вычисляется как для всех, так и каждого в отдельности элементов сканирования, позволяющих двигаться всем ТС в выбранном направлении и исключает все элементы, запрещающие это движение согласно Правилам дорожного движения, такие как размещение и количество полос, с учетом знаков направления или изменения движения, разметки, разделительных сооружений, обочин и т.д.
По отклонению от осевой линии положения кратчайшего расстояния до дальнего скана в ранее описанном порядке определяют величину, изменение и направление поворота дорожного полотна в горизонтальной плоскости, а аналогичным образом по указанным выше действиям, т.е. по изменению положения крайних точек дорожного полотна относительно точки кратчайшего расстояния до дальнего скана и относительно точки пересечения с осевой линией определяют изменение направление поперечного уклона (формы виража) дорожного полотна соответственно в вертикальной и горизонтальной плоскостях,
По полученным одинаково расположенным в пространстве участкам ближнего и дальнего сканов сравнивают и контролируют ошибки сканирования, при необходимости корректируют эти ошибки, а затем все ближние и дальние сканы последовательно записывают в долговременную память.
Затем также по полученным одинаковым по положению в пространстве ближнему и дальнему сканам также сравнивают и контролируют не только ошибки сканирования, но и выявляют наличие изменений одних и тех же элементов разметки дорожного полотна, по их изменению делают вывод о наличии посторонних дефектов и/или предметов на дорожном полотне.
Определяют их реальное положение относительно кратчайшего расстояния до плоскости сканирования и осевой линии дорожного полотна, сравнивают с эталонными значениями и определяют изменение положения в процессе движения и сканирования.
При необходимости корректируют положение ТС на дорожном полотне, возвращая его к эталонному положению относительно осевой линии, для облегчения геометрического преобразования.
При достижении ближним сканом границы очередного участка ставят метку подтверждения и определяют расстояние до дальнего скана, на котором ставят отметку границы следующего участка.
Все эталонные, ближние и дальние сканы последовательно записывают в долговременную память.
В способе трассировки маршрута движения автоматического транспортного средства проводят сканирование на каждом расстоянии, по меньшей мере, в двух различных частотных диапазонах (ИК, видимого света, УФ), что позволяет устранить влияние бликов и неравномерности отражающей способности поверхности дорожного полотна и повысить различимость однотипных элементов сканирования при различных погодных и суточных условиях.
В способе трассировки маршрута движения автоматического транспортного средства проводят контроль привязки сканов к местности по контрольным меткам на дорожном полотне, на обочине или дополнительных сооружениях (ограждениях, километровых или осветительных столбах), например, в виде световозвращающих покрытий (которые могут быть в виде штрихкода), что упрощает привязку к местности и уточняет пространственное положение элементов разметки дорожного полотна. Что особенно важно для магистралей, имеющих мало изменений формы и пространственного положения дорожного полотна. Такая привязка к реальным отметкам пространственного положения и сравнительная простота непрерывного определения пространственной формы дорожного полотна, позволяет упростить и повысить качество управления АТС путем возможности планирования изменения параметров управления АТС в соответствии с дорожными условиями, например, торможением при спуске или увеличением подачи топлива при подъеме.
В способе трассировки маршрута движения автоматического транспортного средства снимают (получают) сканы участков на виражах (поворотах) с разной скоростью и разрешающей способностью ЛФП, что позволяет вместо прямоугольных по форме участков сканов получить сканы, соответствующие пространственным формам дорожного полотна, например, в виде секторов.
На рисунках представлены:
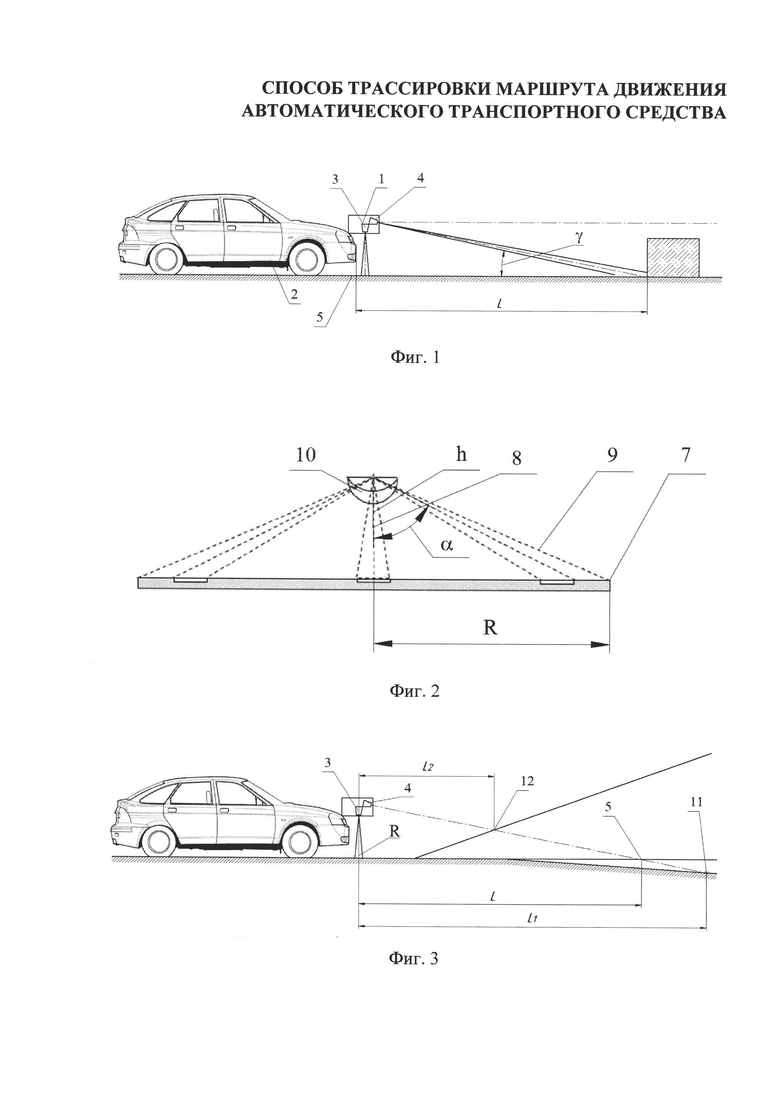
На Фиг. 1 показан вид с боку положения точек сканирования при определении параметров эталонного сканирования.
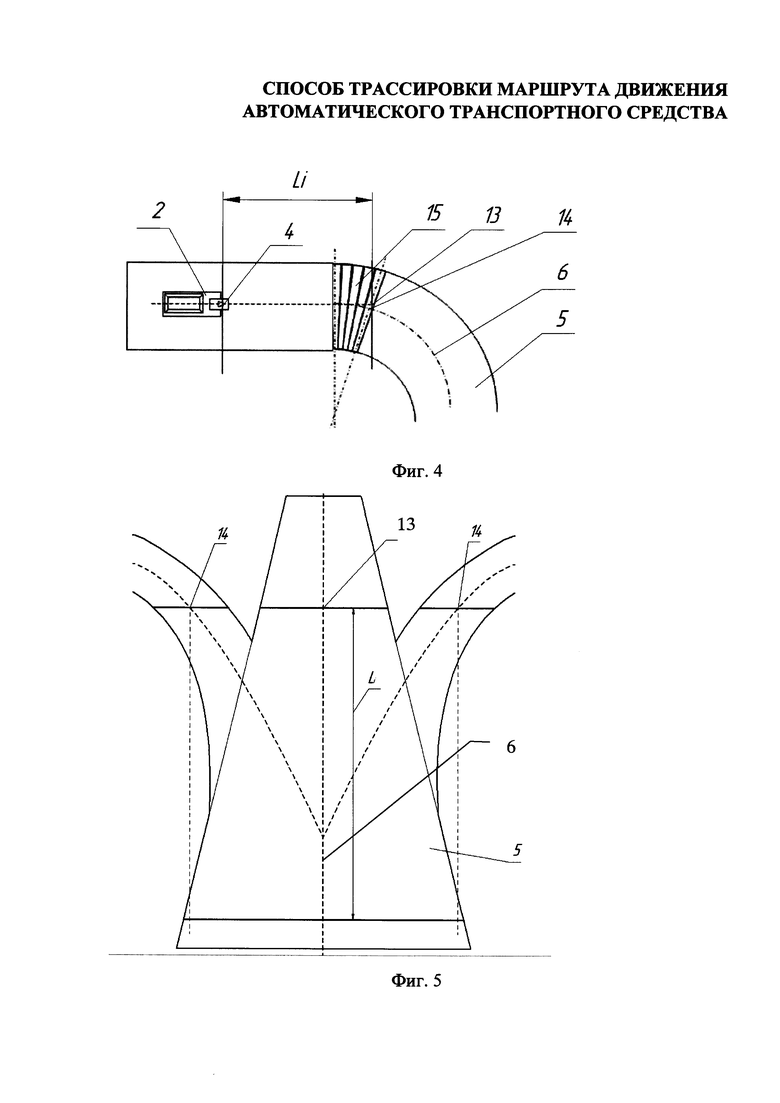
На Фиг. 2 показано определение методом лазерного дальномера расстояний до элементов сканирования, соотношения при геометрической обработке элементов непрерывного изображения для получения смасштабированного изображения из соотношений в прямоугольном треугольнике.
На Фиг. 3 условно показаны на виде с боку положения точек сканирования при изменении рельефа дорожного полотна.
На Фиг. 4 показано условное взаимное расположение участков сканов при повороте дорожного полотна в горизонтальной плоскости.
На Фиг. 5 показано на виде сверху взаимное расположение ближнего и дальнего сканов в перспективе при различных направлениях и формах дорожного полотна.
На Фиг. 1 показано расчетное эталонное расстояние L, полученное при эталонном заданном угле γ наклона к горизонтали и расположении гиростабилизированной платформы 1 на высоте h над дорожным полотном.
Реальное сканирование, как и эталонное может производиться непрерывно одновременно на всю поперечную ширину дорожного полотна линейными фоточувствительным приборами (при этом ЛПФ получается громоздким, но не требующим геометрического преобразования, например, для ближнего скана, а размер для дальнего - увеличивается пропорционально расстоянию и с учетом вида перспективы) или, что является более предпочтительным, ЛФП для ближнего и дальнего скана снабжается соответствующим необходимым объективом. (см. Фиг 2).
Для реализации предложенного способа может быть использовано устройство сканирования, установленное на гиростабилизированной платформе 1 на высоте h над дорожным полотном. Гиростабилизированная платформа 1 представляет собой устройство, в котором известными в современной технике средствами вне зависимости от внешних воздействий на транспортное средство ТС 2 парируются все возмущения положения транспортного средства ТС 2 вокруг или относительно трех осей координат, положение двух линейных фоточувствительных приборов (ЛФП) устройства сканирования при этом не меняется относительно горизонтальной плоскости. Первый ближний линейный фоточувствительный прибор 3 (ЛФП), направлен вертикально вниз и предназначен для получения ближнего скана, а второй дальний линейный фоточувствительный прибор 4, направлен под заданным эталонным углом γ к горизонтали и предназначен для получения дальнего скана. Оба ЛФП всегда одинаково располагаются относительно горизонтальной плоскости.
Первый ближний ЛФП 3, предназначен для получения ближнего скана и расположен, так что плоскость сканирования всегда расположена вертикально, т.е. перпендикулярно горизонтальной плоскости и большей частью перпендикулярно дорожному полотну, и перпендикулярно вертикальной плоскости расположения осевой линии 6 дорожного полотна 5 (см. Фиг. 5). Второй дальний ЛФП 4 располагается под заданным углом γ к горизонтали в направлении осевой линии дорожного полотна 5 и предназначен для получения дальнего скана. При этом любой угол αi сканирования будет определяться по Фиг. 2. Осевая линия 6 дорожного полотна 5 может быть любой формы (см. Фиг. 3, 4 или 5). прямой, дугообразной, ломаной (это бывает в случае примыкания или ответвления боковых дорог у основного, сканируемого дорожного полотна).
Все реальные расстояния до элементов сканирования на ближнем и дальнем сканах могут быть рассчитаны на основе геометрических соотношений или измерены, например, методом лазерного дальномера.
В качестве примера рассмотрим порядок расчета и геометрического преобразования размеров одного из элементов сканирования, например, (см. Фиг. 2) границы сканирования 7 на ближнем скане первого ближнего линейного фоточувствительного прибора 3. Граница сканирования 7 наблюдается ближним ЛФП 3 через объектив под острым углом α, измеряемым от направления 8 (луча) кратчайшего расстояния h до направления луча 9 на границу сканирования 7 (показано условно). Реальный размер расстояния R от точки пересечения направления 8 кратчайшего расстояния h с дорожным полотном на скане до границы сканирования 7 на дорожном полотне определяется по соотношениям прямоугольного треугольника.
R=h×tg α
Предпочтительно снабдить каждый ЛФП оптическими средствами 10 (объективами, линзами), установленными на транспортном средстве (ТС), что не меняет указанных соотношений, только при этом меняется масштаб изображения скана в соответствии с правилами линейной оптики.
Кратчайшее расстояние h на ближнем скане (см. Фиг. 2) может быть определено методом лазерного дальномера (На рисунках не показан). С помощью этого же метода могут быть измерены параметры расположения элементов сканирования на дальнем скане (см. Фиг 5), кратчайшее расстояние до плоскости сканирования и определено их положение относительно осевой линии 6 дорожного полотна.
На Фиг. 2 условно показаны основания для геометрического преобразования. На каждом скане определяется кратчайшее расстояние h до пересечения плоскости сканирования (в общем случае это будет плоскость расположения и направления действия фоточувствительных элементов соответствующего ЛФП) с дорожным полотном.
На гиростабилизированной платформе 1 дополнительно устанавливают устройство лазерного дальномера (на рисунках не показан), которое предназначено для измерения реальных расстояний до различных элементов сканирования, например, таких как границы линий разметки и/или границы сканирования в плоскости сканирования на дорожном полотне 5 и углов, под которыми они наблюдаются из ЛФП.
Сущность геометрического преобразования каждого скана следует из ранее представленных зависимостей и заключается в ниже следующем.
Из такого раздела геометрии как тригонометрия известно, что в прямоугольном треугольнике противолежащий катет R равен произведению прилежащего катета h на тангенс соответствующего острого угла α. Следовательно, все расстояния до каждой соответствующей точки на скане будут функцией тангенса острого угла αi наблюдения этой точки. Таким образом можно для каждого фоточувствительного элемента линейного фоточувствительного прибора определить реальное или рассчитать смасштабированное положение на изображении дорожного полотна.
Способ трассировки маршрута движения автоматического транспортного средства с помощью описанного устройства сканирования с ЛФП осуществляется в нижеследующей последовательности.
Перед началом движения ТС определяют лазерным дальномером реальное эталонное, или измеряют другими средствами или рассчитывают эталонное положение кратчайшего расстояния h до сканируемой поверхности дорожного полотна 5 по выбранному эталонному положению ТС на дорожном полотне 5 для обоих сканов. Такое эталонное положение выбирают или рассчитывают, исходя из условия расположения гиростабилизированной платформы над ровной горизонтальной поверхностью дорожного полотна.
За эталонное положение ТС может быть выбрано любое определенное его положение на дорожном полотне, например, строго по осевой линии дорожного полотна симметрично обочинам или эксцентрично на выбранной полосе движения ТС.
В реальных условиях ближний первый фоточувствительный прибор 3, предназначенный для получения ближнего скана, направляют перпендикулярно к дорожному полотну 5 и определяют его эталонное положение, отклонение от гировертикали, и по нему определяют реальную высоту h ЛФП над негоризонтально расположенным дорожным полотном.
При этом реальное расстояние до дорожного полотна ближнего скана может быть равным эталонному при горизонтальном положении реального дорожного полотна или соответственно отличаться от него. При незначительных отклонениях его от гировертикали и изменении реального расстояния (в пределах ошибки измерения расстояния) эти изменения можно не учитывать.
Случайные изменения высоты при движении ТС над дорожным полотном, возникающие от вибраций из-за воздействия неровностей дорожного полотна или посторонних предметов на нем, могут быть скомпенсированы любым известным способом с помощью известных устройств или при математической обработке сканов, например, путем усреднения измерений траектории движения ТС любым известным методом.
Дальний ЛФП направляют под заданным эталонным углом γ к горизонтали, который является дополнительным для угла наблюдения плоскости сканирования и равен 90° минус угол между вертикалью и лучом направления наблюдения плоскости сканирования αнабi.
Перед началом движения ТС расстояние между ближним и дальним скалами по направлению осевой линии 6 разбивают на равные или пропорциональные участки (на чертежах не показано, так как это может быть выполнено по разным условиям, например, в соответствии с требованиями измерений отклонения осевой линии при повороте.
При этом за нулевую отметку соответственно принимают положение ближнего скана перед началом движения ТС.
Проводят эталонное сканирование одного заранее выбранного эталонного участка. Предпочтительно он должен быть прямой и горизонтально расположенный с одинаковыми по размерам элементами сканирования, что упрощает процесс юстировки.
На обоих сканах ближнем и дальнем эталонного сканирования пробного участка ставят синхронизированные отметки времени.
На обоих сканах ближнем и дальнем эталонного сканирования пробного участка ставят отметки пространственного положения.
Одновременно со сканированием фоточувствительными приборами методом лазерного дальномера определяют расстояние до границ сканирования, и других элементов сканирования дорожного полотна в соответствующей плоскости сканирования.
Затем геометрически обрабатывают полученное изображение и при этом геометрически приводят к единому масштабу.
Повторно математически обрабатывают и получают изображение двух пробных участков, то есть смасштабированные в едином масштабе непрерывные эталонные изображения соответственно участков дорожного полотна с элементами сканирования соответственно у ближнего и дальнего сканов. В смасштабированных изображениях синхронно полученном
фоточувствительными приборами выявляют одинаковые по размерам и форме элементы сканирования, например, линии дорожной разметки.
При этом все элементы сканирования математически могут быть выявлены при помощи известных математических методов преобразования изображения, например, методом Собеля, Хаара, Хафа или другими.
Стандартные элементы сканирования имеют определенные стандартизованные размеры и стандартизованное взаимное положение (согласно требованиям установленным нормативными документами, например, такими как ГОСТ Р 51256-2011 (Технические средства организации дорожного движения. Разметка дорожная. Классификация. Технические требования), Правила Дорожного Движения, СНИПы и правила строительства дорожных сооружений и т.д.), что позволяет определить границы стандартных по размеру сканируемых элементов дорожной разметки на обоих эталонных участках, а по их стандартным размерам и взаимному положению, выявить и исключить вносящие ошибку мелкие и не стандартные дефекты дорожного полотна, например, такие как выбоины или битумированные трещины в дорожном полотне, после чего и сравнить элементы сканирования на двух указанных эталонных участках.
Выявленные однотипные и/или одинаковые по размерам стандартные элементы сканирования на ближнем и дальнем сравнивают и корректируют коэффициенты масштаба для получения одинаковых смаштабированных размеров указанных элементов сканирования в пределах ошибок измерения этих элементов. При не значительном различии размеров, сопоставимых с ошибками измерений, масштабы ближнего и дальнего сканов принимаются равными. Это действие позволяет проверить правильность настройки и юстировки обоих ЛФП.
Далее проводят реальное сканирование дорожного полотна с элементами дорожной разметки.
При дальнейшем реальном сканировании определяют реальное положение элементов сканирования в смасштабированном размере относительно кратчайшего расстояния до плоскости сканирования и осевой линии дорожного полотна, сравнивают с эталонными значениями и определяют изменение положения гиростабилизированной платформы и ТС в процессе движения и сканирования.
Определяют на ближнем скане положение пересечения его с осевой линией, определяют отклонение направления движения реального положения ТС относительно осевой линии, при необходимости корректируют его эталонное положение на дорожном полотне относительно осевой линии, что значительно упрощает анализ и управление движением осуществляющего трассировку ТС. Это позволяет оперативно исправить случайное рыскание ТС по дорожному полотну и при необходимости корректировать положение ТС на дорожном полотне, возвращая его к эталонному положению относительно осевой линии.
По указанным реальным данным, обработанным геометрически и математически, например, методом Собеля, выявляют границы реальных элементов дорожной разметки, что позволяет однозначно определить границы сканируемых элементов дорожной разметки, а по их стандартным размерам и взаимному положению, которое регулируется и устанавливается нормативными документами, например такими как ГОСТ Р 51256-2011 (Технические средства организации дорожного движения. Разметка дорожная. Классификация. Технические требования), Правила Дорожного Движения, СНИПы, Правила строительства дорожных сооружений и т.д., выявить и исключить вносящие ошибку дефекты дорожного полотна.
Контроль пространственного положения ТС при его движении осуществляют любым известным способом с помощью любых известных устройств или других средств, например, для этого могут быть использованы любые известные инерциальные (см. Патент №2335805 РФ, заявители Бузников С.Е., Елкин Д.С. Опубл. 10.10.2008, Или Патент РФ №2513439, заявители Бузников С.Е., Шабанов Н.С. Опубл. 20.04.2014, Бюл. №11.) или спутниковые, такие как GPS и/или ГЛОНАСС, системы определения пространственного положения ТС.
Реальное сканирование, также как и эталонное может производиться непрерывно одновременно на всю поперечную ширину дорожного полотна линейными фоточувствительным приборами (при этом не требуется геометрического преобразования для ближнего скана, а размер для дальнего увеличивается пропорционально расстоянию и с учетом вида перспективы) или, что является более предпочтительным, ЛФП с необходимым объективом или другими оптическими средствами и последующим математическим преобразованием размеров элементов сканирования дорожного полотна в единый одинаковый масштаб размеров элементов, а разбиение на участки сканов непрерывного изображения, предпочтительно выбирать с заданной их одинаковыми шириной и/или пропорциональной длиной вдоль осевой линии дорожного полотна, которую можно выбирать по желанию производителя работ по сканированию, причем с необходимой разной переменной их величиной, выбранной по необходимой частоте сканирования, но с обязательной отметкой реальной ширины и длины участка каждого скана. Это особенно важно при изменении формы дорожного полотна.
При этом ширину, длину или другой размер участков вдоль осевой линии дорожного полотна предпочтительно выбирать одинаковой или кратной (размеру) расстоянию между положениями плоскостей сканирования ближнего и дальнего ЛФП.
На обоих сканах как ближнем, так и дальнем реального сканирования каждого участка ставят синхронизированные отметки времени.
На обоих сканах как ближнем, так и дальнем реального сканирования каждого участка ставят отметки их пространственного положения.
Предпочтительно указанные отметки ставить по границам выбранных участков.
Имеющиеся незначительные расхождения, полученные в следствие ошибок измерения, не учитывают. Обработанные геометрически и математически практически одинаковые по масштабу, размерам, форме и положению в пространстве сканы легко сравнивать. Полученные одинаковые по положению в пространстве сканы сравнивают, определяют и контролируют ошибки сканирования, при необходимости корректируют технические ошибки.
После этого все ближние и дальние сканы последовательно записывают в долговременную память.
Также по полученным одинаковым по положению в пространстве участкам ближнего и дальнего сканов проводят сравнение и при наличии значительных расхождений делают вывод о наличии критических дефектов дорожного полотна и/или посторонних предметов на нем. При необходимости проводят повторное сканирование.
Этот процесс сравнения и анализа можно производить в стационарных условиях на мощной не транспортабельной ЭВМ, при этом все элементы сканирования могут быть приведены к одному виду, то есть могут быть устранены влияния случайных условий, таких как погода, сезон, время суток, отклонение от стандартных размеров элементов сканирования, возникающих из-за нештатной работы устройств, производящих разметку, и т.д.
Кроме этого описанным ниже способом можно определить пространственную форму дорожного полотна.
Для этого определяют реальное положение элементов сканирования и осевой линии в смасштабированном размере относительно кратчайшего расстояния до плоскости сканирования дальнего скана дорожного полотна, сравнивают с эталонными значениями и определяют изменение их положения в процессе движения и сканирования. (см. фиг. 3, 4 и 5)
Кроме этого, чтобы определить реальное положение элементов сканирования в пространстве, сначала определяют их положение относительно осевой линии дорожного полотна для дальнего скана, сравнивают с эталонными значениями и определяют изменение положения в процессе движения и сканирования.
На Фиг. 3, 4 и 5 показано как по изменению кратчайшего расстояния до плоскости дальнего скана в его сравнении с эталонным или расчетным расстоянием L, полученным из условия горизонтального и прямого дорожного полотна, определяют уклон, подъем или поворот дорожного полотна в вертикальной и горизонтальной плоскостях.
Так же как в предыдущем измерении перед началом движения определяют высоту гиростабилизированной платформы над дорожным полотном h и на его основе реальное или расчетное кратчайшее расстояние до эталонного L или реального горизонтального дорожного полотна, полученное при заданном эталонном угле γ наклона к горизонтальной плоскости.
При уклоне расстояние будет увеличиваться, до величины L1 в точке 11, а при подъеме - уменьшаться до величины L2 в точке 12 (см. Фиг. 3). По непрерывному изменению отклонения величины кратчайшего расстояния до дальнего скана от величины эталонного расстояния (при увеличении определяют уклон, а при уменьшении - подъем) определяют величину и реальную пространственную конфигурацию изменения формы дорожного полотна в вертикальной плоскости, исходя конечно из гипотетического условия прямолинейности дорожного полотна.
При перемещении вправо или влево точки кратчайшего расстояния в дальнем скане относительно точки пересечения с осевой линией (см. Фиг. 4 и 5), то есть по изменению положения точки 13 кратчайшего расстояния до плоскости дальнего скана Li относительно точки 14 пересечения осевой линией плоскости сканирования дорожного полотна определяют изменение и направление дорожного полотна (направление поворота) соответственно по направлению смещения точки 14, исходя конечно из гипотетического условия горизонтальности дорожного полотна.
Осевая линия 6 обычно располагается симметрично краям (обочинам) дорожного полотна с учетом суммарной ширины дорожного полотна, в которую должны входить все постоянно присутствующие элементы дорожного полотна или только реально исследуемых полос движения. Расположение осевой линии можно выбрать и по другим параметрам, например, по выбранной полосе движения ТС. Осевая линия математически вычисляется для всех и каждого в отдельности элементов сканирования, позволяющих двигаться всем ТС в выбранном направлении и исключает все элементы, запрещающие это движение согласно Правилам дорожного движения, такие как размещение и количество полос, с учетом знаков, разметки, разделительных сооружений, бордюров и обочин.
По отклонению осевой линии от положения эталонного кратчайшего расстояния до дальнего скана в общем случае одновременно в двух плоскостях, горизонтальной и вертикальной определяют величину, и пространственную конфигурацию изменения и направление поворота дорожного полотна, и аналогично указанным выше действиям по изменению положения крайних точек дорожного полотна относительно точки кратчайшего расстояния и точки пересечения осевой линии с плоскостью сканирования дальнего скана определяют изменение направление поперечного уклона (формы виража) дорожного полотна соответственно в вертикальной и горизонтальной плоскостях. Это делают на основании аналогичных расчетов.
При достижении ближним сканом границы очередного участка ставят метку подтверждения, включающую отметки синхронизации и пространственного положения ближнего и дальнего сканов, и определяют расстояние до дальнего скана, на котором ставят отметку границы следующего участка. Все эталонные, ближние и дальние сканы последовательно записывают в долговременную память.
В способе трассировки маршрута движения автоматического транспортного средства проводят синхронное сканирование на каждом расстоянии, по меньшей мере, в двух различных частотных диапазонах (ИК инфракрасный, видимый свет, УФ ультрафиолетовый, поляризованный свет и т.п.), что позволяет устранить влияние бликов и неравномерности отражающей и/или поглощающей способности поверхности дорожного полотна.
В способе трассировки маршрута движения автоматического транспортного средства проводят контроль привязки сканов к местности, который можно производить по контрольным меткам на дорожном полотне, на обочине или дополнительных сооружениях (ограждениях, километровых или осветительных столбах), например, в виде катафотов - световозвращающих покрытий (которые могут быть в виде штрихкода), что упрощает привязку к местности и уточняет пространственное положение элементов разметки дорожного полотна. Что особенно важно для магистралей, имеющих мало изменений формы и пространственного положения дорожного полотна.
В способе трассировки маршрута движения автоматического транспортного средства снимают (получают) сканы участков на виражах (поворотах) с разной скоростью и разрешающей способностью ЛФП, что позволяет вместо прямоугольных по форме участков сканов получить сканы более соответствующие пространственным формам дорожного полотна, например, в виде секторов 15.
Реальный механизм поворота и изменения пространственного положения сканирующего ЛФП может быть выбран и получен по различным критериальным требованиям, наиболее простым механизмом поворота дальнего ЛПФ на гиростабилизированной платформе, поворачивающий его адекватно величине поворота, может быть симметричный антипараллелограмм, установленный на поворотной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления автоматическим транспортным средством | 2016 |
|
RU2649962C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| Способ управления движением беспилотных автономных транспортных средств (БАТС) и колонн БАТС интеллектуальной транспортной инфраструктурой (ИТИ) автомобильной дороги | 2018 |
|
RU2712487C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Способ дистанционного управления автономным движением колонн и/или беспилотных транспортных средств (БТС) интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2018 |
|
RU2712715C1 |
| Способ управления работой системы активной безопасности транспортных средств | 2018 |
|
RU2704357C1 |
| Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2019 |
|
RU2725569C1 |
| Универсальный способ фотофиксации нарушений ПДД | 2019 |
|
RU2749941C2 |
| Способ детекции протяженных линейных объектов на изображении | 2022 |
|
RU2802991C1 |
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом | 2018 |
|
RU2690143C1 |
Способ трассировки маршрута движения автоматического транспортного средств (АТС) относится к способам организации движения автоматически управляемых транспортных средств и может быть использован в любой отрасли народного хозяйства для автоматизированных перевозок различных грузов и пассажиров. Способ трассировки маршрута движения автоматического транспортного средства, при котором проводят непрерывное синхронное сканирование дорожного полотна с дорожной разметкой по меньшей мере двумя линейными фоточувствительными приборами (ЛФП), установленными на гиростабилизированной платформе в транспортном средстве (ТС), располагаемыми на заданной высоте над дорожным полотном и соответственно направленными на два разных участка дорожного полотна, расположенных на двух различных расстояниях от ТС, соответственно ближнем и дальнем, позиционированных в пространстве и привязанных к их положению относительно дорожного полотна. Полученные изображения преобразуют геометрически и математически. По результатам сравнения изображений определяют пространственную форму дорожного полотна. Техническим результатом является повышение качества трассировки и последующего управления ТС на дорожном полотне в условиях воздействия помех. 4 з.п. ф-лы, 5 ил.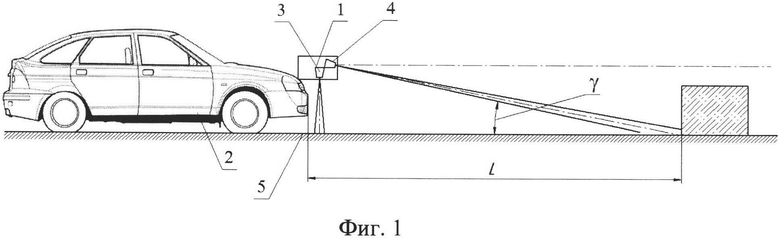
1. Способ трассировки маршрута движения автоматического транспортного средства, при котором:
проводят непрерывное сканирование дорожного полотна с дорожной разметкой по меньшей мере двумя линейными фоточувствительными приборами (ЛФП), установленными на транспортном средстве (ТС), располагаемыми на заданной высоте над дорожным полотном и соответственно направленными на два разных участка дорожного полотна, расположенных на двух различных расстояниях от ТС, соответственно ближнем и дальнем, позиционированных в пространстве и привязанных к их положению относительно дорожного полотна;
полученные синхронно линейными фоточувствительными приборами изображения обрабатывают геометрически;
преобразуют элементы изображения в единый смасштабированный одинаковый размер;
получают смасштабированное в едином масштабе непрерывное изображение дорожного полотна;
полученное синхронно фоточувствительными приборами смасштабированное изображение повторно математически обрабатывают;
выявляют такие элементы сканирования, как осевая линия дорожного полотна, сплошные, прерывистые или иные линии дорожной разметки, границы дорожного полотна и границы сканирования;
определяют положение элементов сканирования относительно осевой линии дорожного полотна на сканах и оценивают их пространственную форму;
а по положению относительно линейных фоточувствительных приборов (ЛФП) в пространстве элементов дорожной разметки и осевой линии и других элементов сканирования определяют положение и отклонение ТС на полосе движения, при необходимости корректируют положение ТС;
полученные данные записывают в долговременную память в виде изображений линейного сканирования и связанных с ними соответствующих им данных о их пространственном положении и времени сканирования,
отличающийся тем, что
линейные фоточувствительные приборы (ЛФП) устанавливают на гиростабилизированную платформу;
определяют методом лазерного дальномера реальное эталонное или рассчитывают эталонное положение кратчайшего расстояния до сканируемой поверхности по выбранному положению ТС на дорожном полотне для обоих сканов;
ближний фоточувствительный прибор направляют перпендикулярно к дорожному полотну и определяют его эталонное положение, отклонение от гировертикали, определяют реальную высоту ЛФП над дорожным полотном;
дальний ЛФП направляют под заданным эталонным углом к горизонтали;
перед началом движения ТС расстояние между ближним и дальним сканами по направлению осевой линии разбивают на равные или пропорциональные участки;
при этом за нулевую отметку соответственно принимают положение ближнего скана перед началом движения ТС;
проводят эталонное сканирование одного участка;
одновременно со сканированием дальним фоточувствительным прибором методом лазерного дальномера определяют расстояние до границ сканирования и других элементов сканирования дорожного полотна в плоскости сканирования, геометрически обрабатывают полученное изображение и геометрически приводят к единому масштабу;
повторно математически обрабатывают и получают смасштабированное в едином масштабе непрерывное эталонное изображение участка дорожного полотна с элементами сканирования, в смасштабированном изображении, синхронно полученном фоточувствительными приборами, выявляют однотипные элементы дорожной разметки, сравнивают и корректируют при необходимости их масштабы;
в реальных условиях ближний фоточувствительный прибор направляют перпендикулярно к дорожному полотну и определяют его отклонение от гировертикали;
проводят реальное сканирование дорожного полотна с элементами дорожной разметки;
на обоих сканах ближнем и дальнем эталонного и реального сканирования каждого участка ставят синхронизированные отметки времени;
на обоих сканах ближнем и дальнем эталонного и реального сканирования каждого участках сканов ставят отметки пространственного положения;
определяют реальное положение элементов сканирования в смасштабированном размере относительно кратчайшего расстояния до плоскости сканирования дальнего скана и осевой линии дорожного полотна, сравнивают с эталонными значениями и определяют изменение положения в процессе движения и сканирования;
по изменению отклонения величины кратчайшего расстояния от эталонной величины до дальнего скана определяют уклон или подъем дорожного полотна в вертикальной плоскости;
а по изменению положения точки кратчайшего расстояния дальнего скана относительно точки пересечения скана осевой линией дорожного полотна в месте сканирования определяют величину, изменение и направление поворота дорожного полотна в горизонтальной плоскости;
по изменению положения крайних точек дорожного полотна относительно точки кратчайшего расстояния до дальнего скана и относительно точки пересечения с осевой линией определяют изменение направления поперечного уклона (формы виража) дорожного полотна соответственно в вертикальной и горизонтальной плоскостях;
затем по полученным одинаковым по положению в пространстве ближнему и дальнему сканам сравнивают и контролируют ошибки сканирования, при необходимости корректируют ошибки, а затем все ближние и дальние сканы последовательно записывают в долговременную память;
выявляют наличие изменений одних и тех же элементов разметки дорожного полотна, по их изменению делают вывод о наличии посторонних дефектов и/или предметов на дорожном полотне;
при достижении ближним сканом границы очередного участка ставят метку подтверждения и определяют расстояние до дальнего скана, на котором ставят отметку границы следующего участка;
все эталонные ближние и дальние сканы последовательно записывают в долговременную память;
при необходимости корректируют положение ТС на дорожном полотне, возвращая его к эталонному положению относительно осевой линии.
2. Способ трассировки дорожного пути для движения автоматического транспортного средства по п. 1, отличающийся тем, что сканирование на каждом расстоянии проводят по меньшей мере в двух различных частотных диапазонах (ИК, видимого света, УФ).
3. Способ трассировки дорожного пути для движения автоматического транспортного средства по п. 1, отличающийся тем, что сканирование на каждом расстоянии проводят поляризованным светом.
4. Способ трассировки дорожного пути для движения автоматического транспортного средства по п. 1, отличающийся тем, что контроль привязки сканов к местности производят по контрольным меткам, расположенным или на дорожном полотне, или на обочине, или на дополнительных сооружениях (ограждениях, километровых или осветительных столбах).
5. Способ трассировки дорожного пути для движения автоматического транспортного средства по п. 1, отличающийся тем, что участки на виражах (поворотах) снимают с поворотом дальнего ЛФП на гиростабилизированной платформе механизмом симметричного антипараллелограмма синхронно с поворотом оси.
| US 7415335 B2, 19.08.2008 | |||
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ПОЛОСЫ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2572939C9 |
| WO 2013116141 A1, 08.08.2013. | |||

