Способ относится к способам управления автоматическим транспортным средством (АТС) на основе анализа и сравнения сканирования линейными фоточувствительными приборами (ЛФП) дорожного полотна с его разметкой и его сравнение реальных изображений с изображениями эталонных сканов и текущих сканов, отсканированных заранее и геометрически и математически преобразованных в линейные сканы одного масштаба с элементами сканирования.
Может быть использован во всех отраслях народного хозяйства, где могут применяться автоматические ТС с автоматизированным управлением.
Известен способ управления автоматическим транспортным средством (АТС) (см. патент США № US 8364334, заявитель HONEYWELL INTERNATIONAL INC, опубл. 29.01.2013), характеризующийся тем, что из реального изображения, полученного методом лазерного сканирования, которое математически преобразуют и получают изображения элементов сканирования, сравнивают изображение дорожного полотна с элементами сканирования с изображением, оставшиеся изображения дорожного полотна с элементами сканирования анализируют, по результатам вырабатывают управляющие действия для АТС.
Основным недостатком известного способа является сканирование дорожного полотна лазером, который имеет малый угол раскрытия, что требует высокой строчечной развертки, последовательного линейного сканирования. При сравнительно высокой скорости наступает предел скорости обработки поступающего сигнала или пропуск, то есть появление расстояния между строками сканирования, то есть не учитываемой ошибки вида (полного изображения) дорожного полотна.
Известен способ управления автоматическим транспортным средством (АТС) (см. опубликованную заявку США № US 2010110193, заявитель KOBAYASHI SACHIO, опубл. 06.05.2010), характеризующийся тем, что из реального изображения, которое математически преобразуют и получают изображения элементов сканирования, сравнивают изображение дорожного полотна с элементами сканирования с изображением, на котором последовательно удаляют изображения посторонних элементов, а оставшиеся изображения дорожного полотна с элементами сканирования анализируют, по результатам вырабатывают управляющие действия для АТС.
Основным недостатком известного способа является необходимость использования ЭВМ с большой производительностью и малая вариативность полученного изображения, предназначенного для анализа.
Известен способ управления автоматическим транспортным средством (АТС) (см. патент США № US 9378424, заявитель RICOH COMPANY, LTD, опубл. 28.06.2016), характеризующийся тем, что из долговременной памяти ЭВМ извлекают математически обработанное изображение дорожного полотна с элементами сканирования, математически преобразуют его, получают реальное изображение дорожного полотна, математически преобразовывают реальное изображение дорожного полотна и получают изображения областей расположения элементов сканирования и посторонних элементов изображения и последовательно удаляют изображения посторонних элементов, сравнивают оставшиеся изображения дорожного полотна с элементами сканирования, по результатам вырабатывают управляющие действия для АТС.
Основным недостатком является малая вариативность изображений, получаемых из долговременной памяти ЭВМ, соответственно высокие требуемые объемы памяти и вычислительные возможности процессора ЭВМ.
Известен способ управления транспортным средством (АТС) (см. патент США № US 8941738, заявитель FUJI JUKOGYO KABUSHIKI KAISHA, опубл. 15.01.2015), характеризующийся тем, что из долговременной памяти ЭВМ извлекают математически обработанное изображение дорожного полотна с элементами сканирования, получают реальное изображение дорожного полотна, математически преобразовывают реальное изображение дорожного полотна и получают изображения областей расположения элементов сканирования и посторонних элементов изображения, сравнивают оставшиеся изображения дорожного полотна с элементами сканирования с математически преобразованным реальным изображением дорожного полотна, по результатам вырабатывают управляющие действия для АТС.
Основным недостатком известного способа является большой объем вычислений и малая возможность изменения текущих изображений из памяти ЭВМ (вариативность) и их сравнение с изменяющимися реальными условиями.
Известен способ управления автоматическим транспортным средством (АТС) (см. патент США № US 6748302, заявитель NISSAN MOTOR CO., LTD, опубл. 08.06.2004), характеризующийся тем, что из долговременной памяти ЭВМ извлекают математически обработанное изображение дорожного полотна с элементами сканирования, математически преобразуют его в соответствие с точкой наблюдения (положения АТС на дорожном полотне) в изображение в перспективе, получают реальное изображение дорожного полотна, математически преобразовывают реальное изображение дорожного полотна и получают изображения областей расположения элементов сканирования и посторонних элементов изображения, сравнивают оставшиеся изображения дорожного полотна с элементами сканирования с математически преобразованным реальным изображением дорожного полотна, по результатам вырабатывают управляющие действия для АТС.
Основным недостатком известного способа является большой объем вычислений для выработки управляющих действий.
Известен способ управления автоматическим транспортным средством (АТС) (см. патент США №US 9489583, заявитель DENSO CORPORATION, опубл. 08.11.2016), характеризующийся тем, что из долговременной памяти ЭВМ извлекают математически обработанное изображение дорожного полотна с элементами сканирования, математически преобразуют его в соответствии с точкой наблюдения (положения АТС на дорожном полотне) в изображение в перспективе, получают реальное изображение дорожного полотна, математически преобразовывают реальное изображение дорожного полотна и получают изображения областей расположения элементов сканирования и посторонних элементов изображения и последовательно удаляют эти изображения посторонних элементов, сравнивают оставшиеся изображения дорожного полотна с элементами сканирования с математически преобразованным реальным изображением дорожного полотна, по результатам вырабатывают управляющие действия для АТС.
Основным недостатком известного способа является сложная последовательность получения математически обработанного изображения из-за последовательного удаления отдельных элементов изображений.
Известен способ управления автоматическим транспортным средством (АТС) (см. патент США № US 6091833, заявитель MATSUSHITA ELECTRIC IND СО LTD, опубл. 18.07.2000), характеризующийся тем, что из долговременной памяти ЭВМ извлекают математически обработанное изображение дорожного полотна с элементами сканирования, математически преобразуют его в соответствии с точкой наблюдения (положения АТС на дорожном полотне) в изображение в перспективе, получают реальное изображение дорожного полотна, математически преобразовывают реальное изображение дорожного полотна и получают изображения областей расположения элементов сканирования, сравнивают изображение дорожного полотна с элементами сканирования с математически преобразованным реальным изображением дорожного полотна, по результатам вырабатывают управляющие действия для АТС.
Основным недостатком известного способа является сложная последовательность извлечения контуров элементов сканирования в двух частотных диапазонах сканирования.
Известен способ управления автоматическим транспортным средством (АТС) (см. патент США № US 5922036, заявитель MATSUSHITA ELECTRIC IND СО LTD, опубл. 13.07.1999), характеризующийся тем, что из долговременной памяти ЭВМ извлекают математически обработанное изображение дорожного полотна с элементами сканирования, математически преобразуют его в соответствии с точкой наблюдения (положения АТС на дорожном полотне) в изображение в перспективе, получают реальное изображение дорожного полотна, математически преобразовывают реальное изображение дорожного полотна и получают изображения элементов сканирования, сравнивают изображение дорожного полотна с элементами сканирования с математически преобразованным реальным изображением дорожного полотна, по результатам вырабатывают управляющие действия для АТС.
Способ имеет наибольшее количество совпадающих и аналогичных действий с предложенным способом, а также он наиболее близок по технической сути и направленности действий, по этой причине принимаем его в качестве прототипа.
Основным недостатком известного способа является сложная последовательность получения всех элементов сканирования на реальном скане из-за последовательного выявления каждого элемента сканирования, то есть каждой отдельной линии разметки, и последующее построение реального изображения в перспективном реальном виде.
Технической задачей предложения является повышение вариабельности текущего изображения, получаемого из памяти ЭВМ, и повышение его адаптивности к реальным условиям и соответственно возможности сравнения с реальным математически обработанным и динамически меняющимся изображением, при минимизации объемов математических вычислений, что позволяет использовать маломощные мобильные ЭВМ.
 -ая, -ое; -лен, -льна, -льно [англ. variable - неустойчивый] Книжн. Способный иметь варианты, видоизменяться в каких-л. пределах. В-ые комбинации. В-ые формы заболевания. Способность человека переносить физические нагрузки вариабельна.
-ая, -ое; -лен, -льна, -льно [англ. variable - неустойчивый] Книжн. Способный иметь варианты, видоизменяться в каких-л. пределах. В-ые комбинации. В-ые формы заболевания. Способность человека переносить физические нагрузки вариабельна.

Энциклопедический словарь. 2009.
Адаптивность - способность устройств и программ для повышения эффективности работы в зависимости от внешних факторов изменять свои параметры и характеристики. Адаптивность обеспечивает адаптацию - приспосабливаемость устройств и программ к условиям их применения. Широкое распространение получила адаптивная маршрутизация.
Справочник технического переводчика. - Интент. 2009-2013
Вариабельность и адаптивность изображения достигается тем, что текущие геометрически и математически обработанные изображения дорожного полотна с элементами сканирования из долговременной памяти и реальные изображения получены в одинаковых исходных условиях, то есть, по меньшей мере, из двух линейных фоточувствительных приборов (ЛФП), установленных на гиростабилизированной платформе. Это позволяет исключить влияние пространственного несоответствия положения ЛФП при первичной трассировке и последующем получении геометрически и математически обработанных текущих изображений и сканов дорожного полотна с элементами сканирования, получаемых из памяти ЭВМ, и реальных изображений, получаемых из телекамеры.
Кроме этого указанные полученные геометрическим и математическим преобразованием текущие изображения и сканы дорожного полотна с элементами сканирования, получаемыми из памяти ЭВМ, можно одним геометрическим преобразованием привязать к любому положению АТС на дорожном полотне, путем задачи острого угла положения границы сканирования, который, например, может быть получен из реального устройства лазерного дальномера. При этом текущие изображения строятся путем геометрического преобразования каждого участка между ближним и дальним сканами в соответствии с правилами пространственной перспективы. По результатам получается изображение и строится контур текущего вида. Из реального изображения вырезаются в соответствии с контуром внутренние изображения дорожного полотна и элементов сканирования, при этом сложные изображения посторонних предметов в виде деревьев, кустов, строений, пешеходом и т.д. автоматически выпадают из изображения, а легкораспознаваемые после математического преобразования (методами Хафа, Собеля и т.п.) реальные элементы сканирования могут быть сравнены с текущими, выполненными в аналогичном виде и масштабе. Эти действия имеют высокую адаптивность и взаимное соответствие при соответствующем геометрическом и математическом преобразовании.
Техническая задача решается способом управления автоматическим транспортным средством (АТС), характеризующимся тем, что из долговременной памяти ЭВМ извлекают математически обработанное изображение дорожного полотна с элементами сканирования, математически преобразуют его в соответствии с точкой наблюдения (положения АТС на дорожном полотне) в изображение в перспективе, получают реальное изображение дорожного полотна, математически преобразовывают реальное изображение дорожного полотна и получают изображения элементов сканирования, сравнивают изображения дорожного полотна с элементами сканирования с математически преобразованным реальным изображением дорожного полотна, по результатам вырабатывают управляющие действия для АТС, причем текущие геометрически и математически обработанные изображения дорожного полотна с элементами сканирования из долговременной памяти и реальные изображения получены, по меньшей мере, из двух линейных фоточувствительных приборов (ЛФП), установленных на гиростабилизированной платформе, а последовательность действий по управлению АТС на основе их анализа включает подготовительный этап и этапы расчета текущего угла поворота руля, текущего управления педалью акселератора, определения наличия препятствий и построения вида дорожного полотна:
1. Подготовительный этап: извлечение из долговременной памяти в оперативное запоминающее устройство
2. Извлечение эталонного расположения элементов сканирования дорожного полотна
3. Извлечение расположения элементов сканирования дорожного полотна для ближнего и дальнего сканов и промежуточных участков.
4. Извлечение текущего ближнего скана из памяти ЭВМ
5. Извлечение текущего дальнего скана из памяти ЭВМ
6. Извлечение промежуточных участков, расположенных между ближним и дальним сканами
определение управляющих воздействий включает
7. Этап 1: программа расчета текущего поворота руля
8. Сравнивают извлеченные из памяти ЭВМ эталонные и текущие положения
9. Пересечения текущим положением осевой линии текущего дальнего скана
10. Пересечения текущим кратчайшим расстоянием текущего дальнего скана
11. Если их положение совпадает, сравнивают с предыдущим: при их совпадении переходят к концу этапа, а при несовпадении к началу этапа.
12. При несовпадении сравнивают их по величине и увеличивают или уменьшают до расчетного или извлеченного из памяти ЭВМ значения
13. Полученное текущее значение угла поворота сравнивают с реальным
14. При совпадении заканчивают расчеты на этапе до следующей проверки по времени или положению в пространстве
15. Этап 2: Программа управления педалью акселератора
16. Сравнивают эталонное положение педали акселератора с текущим
17. Если совпадает, то переходят к этапу 1
18. Если не совпадают, сравнивают с предыдущим текущим
19. При их совпадении сравнивают с реальным, при совпадении переходят к концу этапа
20. При несовпадении сравнивают их отношение
21. Если оно больше 1, уменьшают угол положения (снижают нагрузку на двигатель)
22. Если оно меньше 1, увеличивают угол положения (повышают нагрузку на двигатель)
23. Полученное текущее значение угла сравнивают с реальным, при их совпадении переходят к концу этапа
24. При несовпадении изменяют в необходимую сторону.
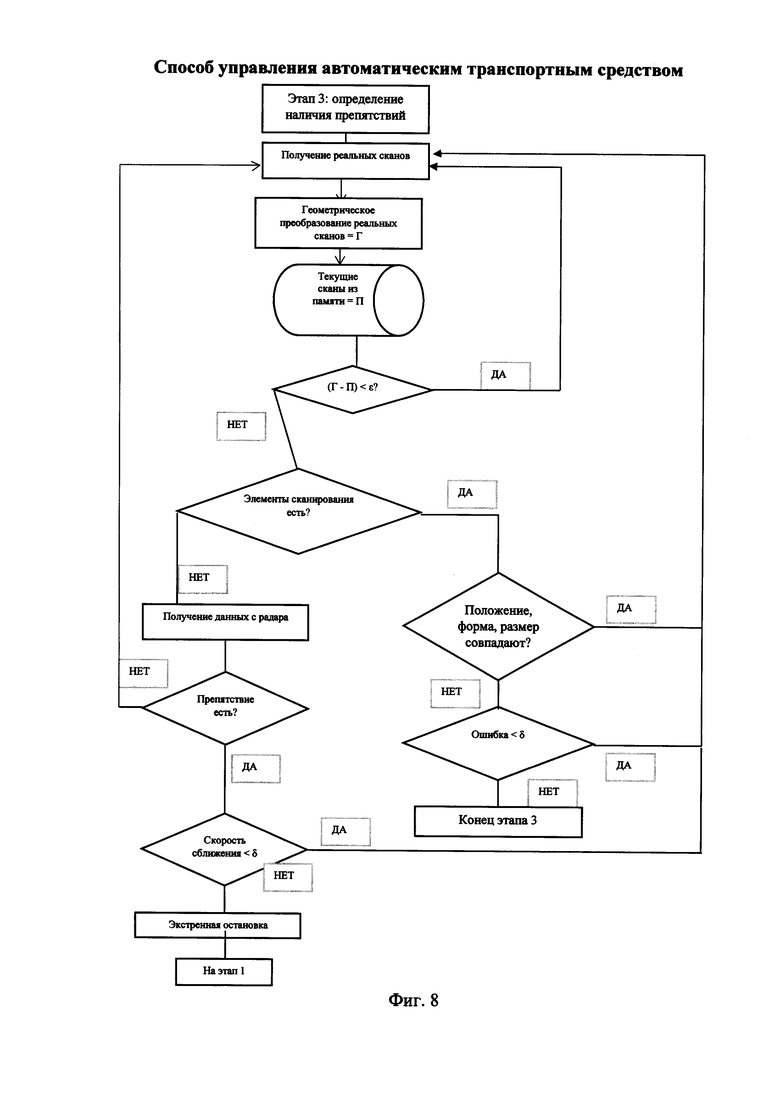
25. Этап 3: определение наличия препятствий
26. Получают реальные дальний и ближний сканы
27. Извлекают соответствующие им текущие ближний и дальний
28. Преобразуют геометрически и математически реальные сканы
29. Сравнивают пары соответствующих ближних и дальних сканов
30. Устанавливают, есть ли на парах все элементы сканирования
31. При отсутствии, по меньшей мере, одного элементы сканирования включают и/или запрашивают данные от радара
32. При обнаружении препятствия определяют скорость сближения
33. Если скорость сближения выше установленной, переходят к экстренному торможению и переходят на этап 1
34. Если скорость сближения меньше установленной, переходят к началу этапа 3
35. При наличии всех элементов сканирования сравнивают их форму и размеры с реальными
36. Если несовпадение больше заданной величины, возвращаются к началу этапа 3
37. Если меньше, переходят к концу этапа
Отсутствие даже одного элемента сканирования предполагает, что он закрыт от наблюдения посторонним предметом или он исчез из-за разрушения дорожного полотна. Оба указанных аварийных случая выявляются радаром и являются необходимой причиной для экстренного торможения
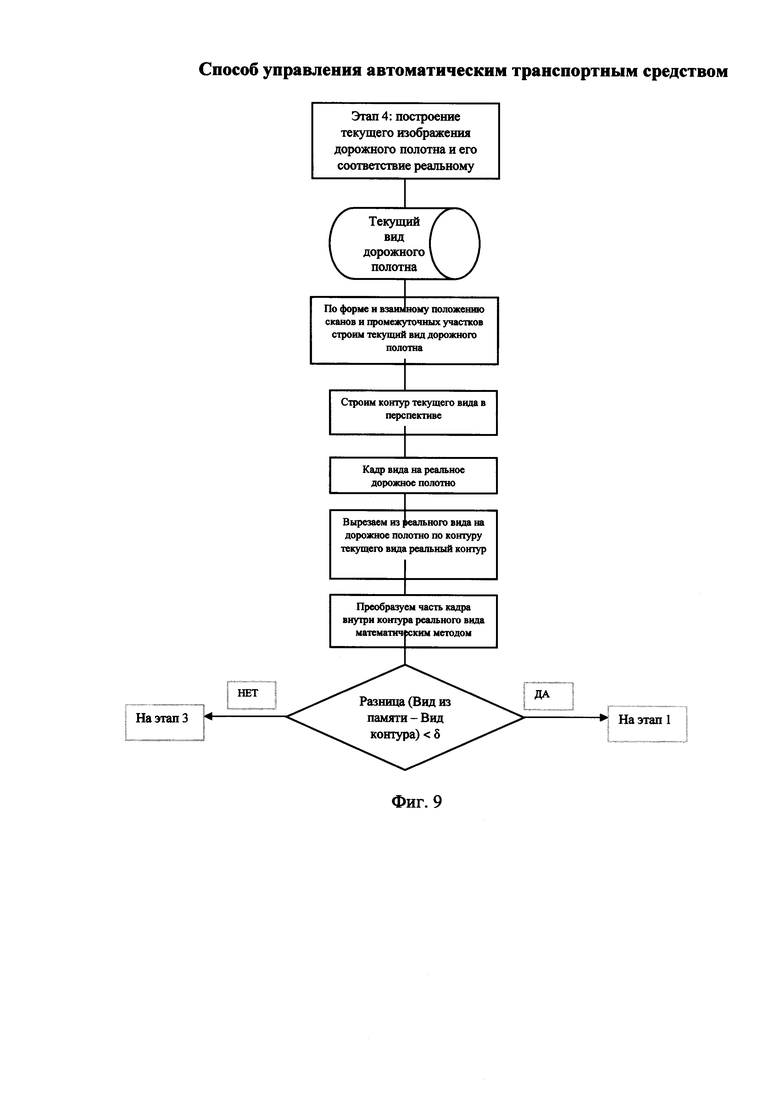
38. Этап 4: построение текущего изображения дорожного полотна и анализа его соответствия реальному
39. Строят по текущим ближнему, дальнему и расположенным между ними промежуточным участкам методом геометрического преобразования текущий вид в соответствующей перспективе.
40. На полученном текущем виде определяют или строят ограничивающий вид контур
41. На реальном виде вырезают часть, ограниченную контуром, внешнюю лежащую за пределами контура удаляют
42. Оставшуюся часть преобразуют математически
43. Полученные текущий и реальный виды сравнивают
44. При незначительных несовпадениях элементов сканирования по форме, положению на дорожном полотне и/или размерам переходят к этапу 1
45. При значительном несовпадении элементов сканирования по форме, положению на дорожном полотне и/или размерам переходят к этапу 3
Возможно и изменение положения АТС на дорожном полотне (маневра, который не рассматривается в данном случае подробно, так как предложенный способ предназначен в основном для использования в условиях массового применения АТС, которые не подвержены экстремальному стилю вождения, например, такому как «игра в шашечки») и обычно движутся строго параллельно одно другому.
Реализация предложенного способа поясняется чертежами.
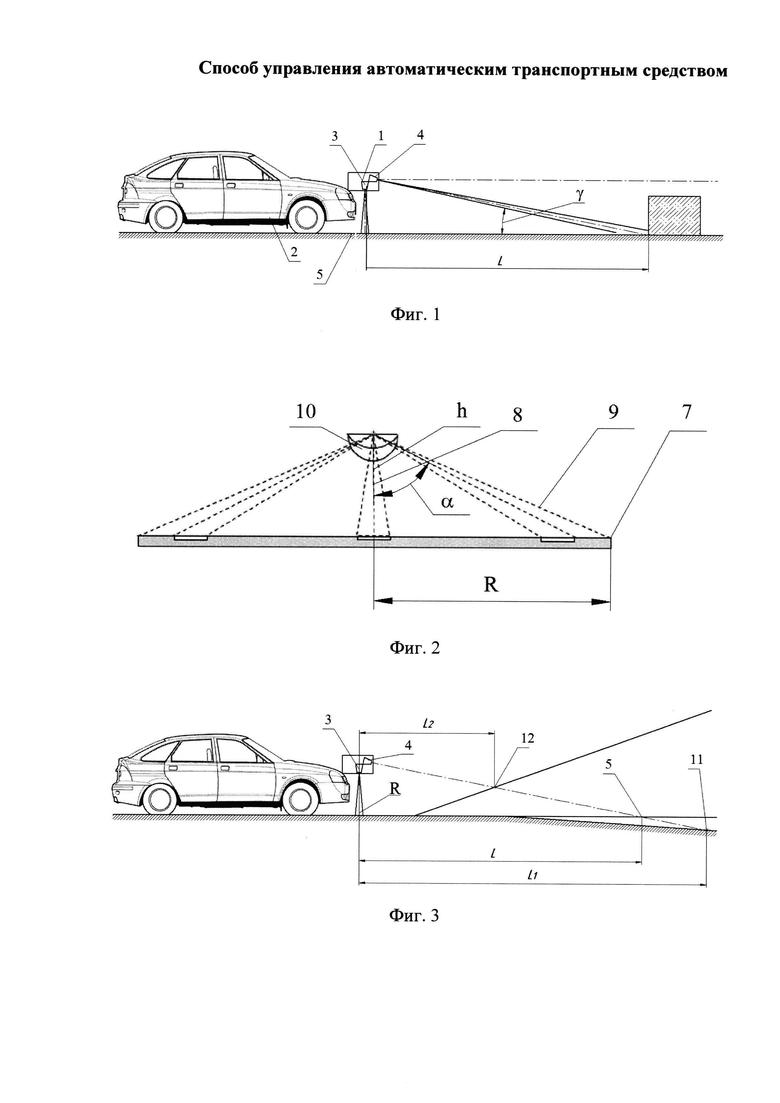
На Фиг. 1 показан вид сбоку на АТС с гиростабилизированной платформой положения точек сканирования при определении параметров эталонного сканирования.
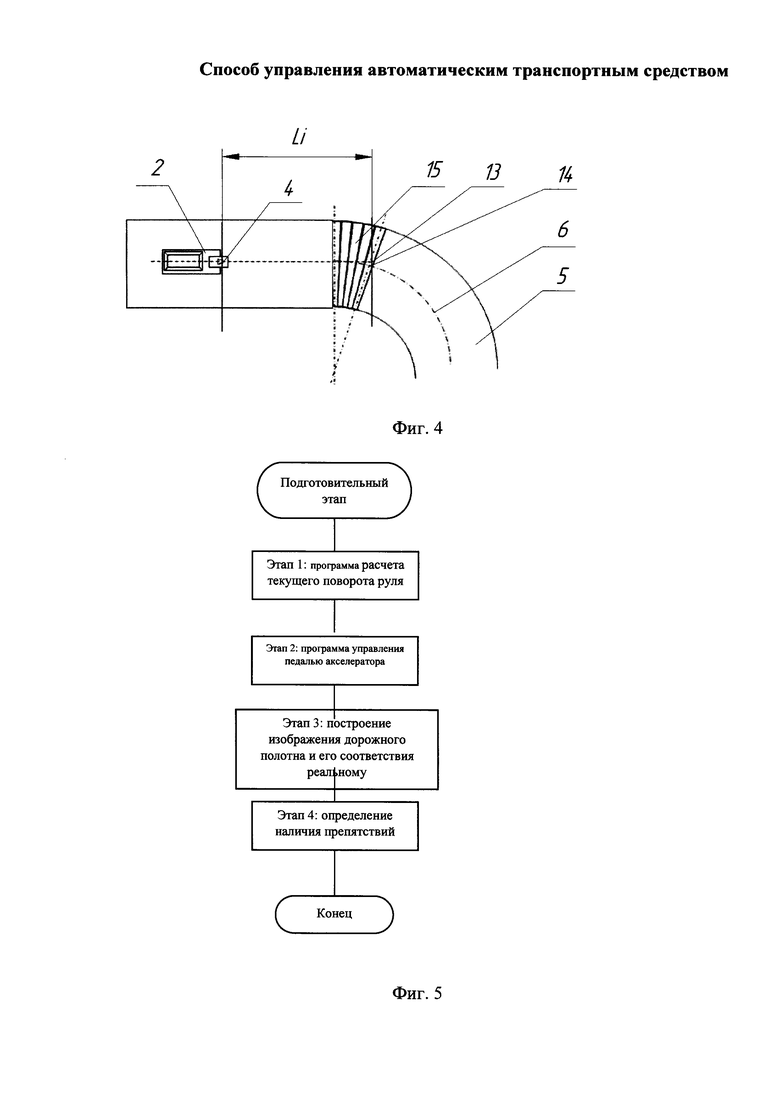
На Фиг. 2 показано определение методом лазерного дальномера расстояний до элементов сканирования, соотношения при геометрической обработке элементов непрерывного изображения для получения смасштабированного изображения из соотношений в прямоугольном треугольнике.
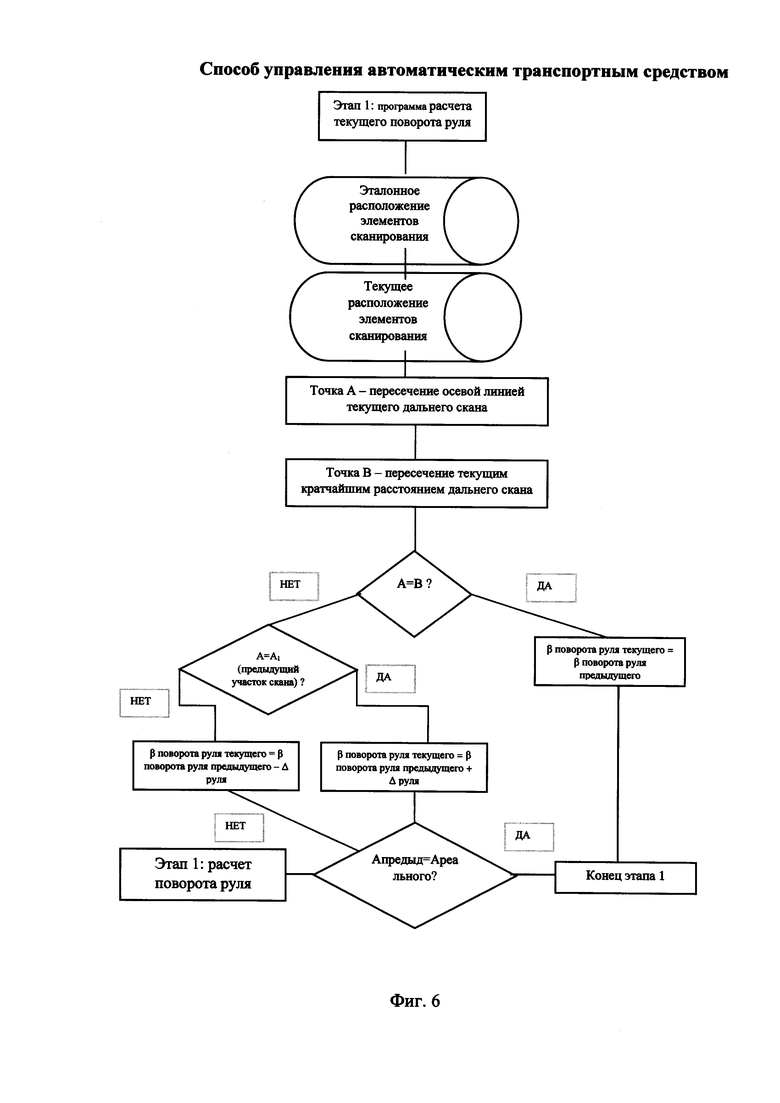
На Фиг. 3 условно показаны на виде сбоку на АТС с гиростабилизированной платформой положения точек сканирования при изменении рельефа дорожного полотна.
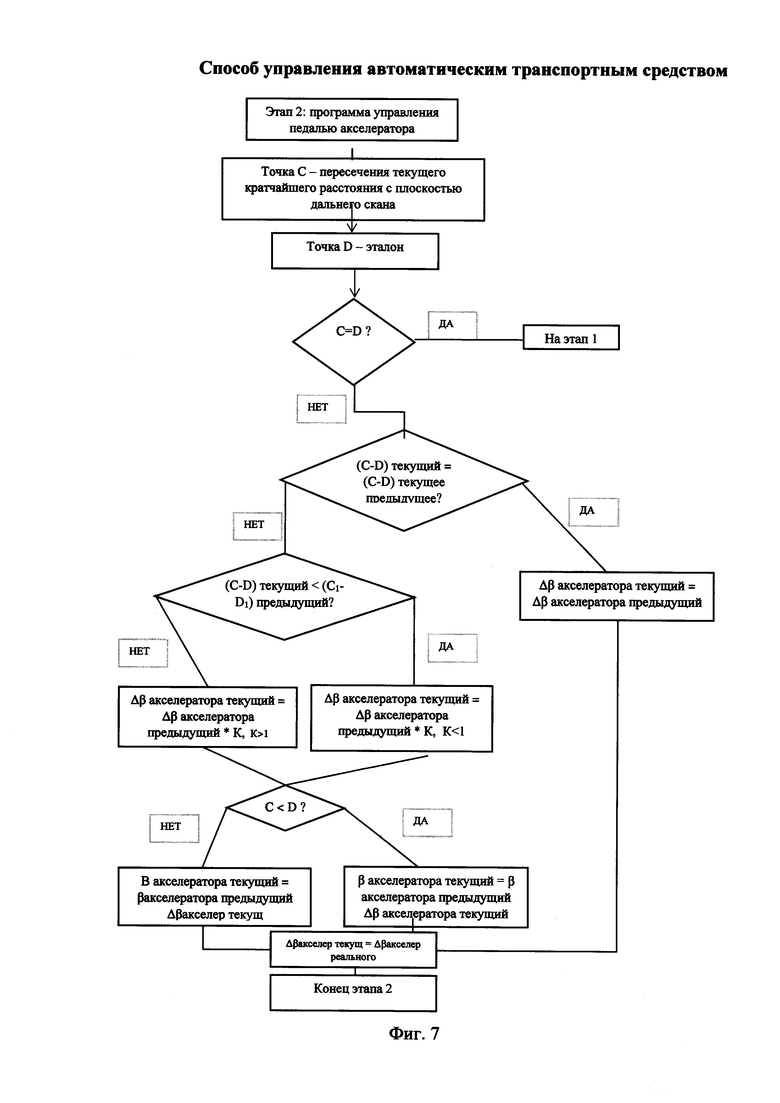
На Фиг. 4 показано условное взаимное расположение участков сканов при повороте дорожного полотна в горизонтальной плоскости.
На Фиг. 5 показана последовательность проведения этапов для осуществления способа управления автоматическим транспортным средством, то есть определение управляющих воздействий на органы управления АТС.
На Фиг. 6 показана последовательность проведения первого этапа для осуществления способа управления автоматическим транспортным средством, заключающегося в получении реального поворота руля рулевого управления.
На Фиг. 7 показана последовательность проведения второго этапа для осуществления способа управления автоматическим транспортным средством, заключающегося в управлении педалью акселератора.
На Фиг. 8 показана последовательность проведения третьего этапа для осуществления способа управления автоматическим транспортным средством, заключающегося в определении наличия препятствий и изменения дорожного полотна.
На Фиг. 9 показана последовательность проведения четвертого этапа для осуществления способа управления автоматическим транспортным средством, заключающегося в построении и сравнении текущего и реального изображения дорожного полотна.
Реальное сканирование, как текущее и эталонное, может производиться непрерывно одновременно на всю поперечную ширину дорожного полотна линейными фоточувствительными приборами (при этом ЛПФ получается громоздким, но не требующим геометрического преобразования, например, для ближнего скана, а размер для дальнего - увеличивается пропорционально расстоянию и с учетом вида перспективы) или, что является более предпочтительным, ЛФП для ближнего и дальнего скана снабжается соответствующим необходимым объективом (см. Фиг 2).
Для реализации предложенного способа могут быть использованы устройства сканирования, установленные на гиростабилизированной платформе 1 на высоте h над дорожным полотном. Гиростабилизированная платформа 1 представляет собой устройство, в котором известными в современной технике средствами вне зависимости от внешних воздействий на транспортное средство ТС 2 парируются все возмущения положения транспортного средства ТС 2 вокруг или относительно трех осей координат, положение двух линейных фоточувствительных приборов (ЛФП) устройства сканирования при этом не меняется относительно горизонтальной плоскости. Первый ближний линейный фоточувствительный прибор 3 (ЛФП) направлен вертикально вниз и предназначен для получения реального ближнего скана, а второй дальний линейный фоточувствительный прибор 4 направлен под заданным эталонным углом γ к горизонтали и предназначен для получения реального дальнего скана. Оба ЛФП всегда одинаково располагаются относительно горизонтальной плоскости.
Первый ближний ЛФП 3 предназначен для получения ближнего скана и расположен, так что плоскость сканирования всегда расположена вертикально, т.е. перпендикулярно горизонтальной плоскости и большей частью перпендикулярно дорожному полотну и перпендикулярно вертикальной плоскости расположения осевой линии 6 дорожного полотна 5 (см. Фиг. 1). Второй дальний ЛФП 4 располагается под заданным углом γ к горизонтали в направлении осевой линии дорожного полотна 5 и предназначен для получения дальнего скана. При этом любой угол αi сканирования будет определяться по Фиг. 2. Осевая линия 6 дорожного полотна 5 может быть любой формы (см. Фиг. 3 или 4) - прямой, дугообразной, ломаной (это бывает в случае примыкания или ответвления боковых дорог у основного сканируемого дорожного полотна).
Все реальные расстояния до элементов сканирования на ближнем и дальнем сканах могут быть рассчитаны на основе геометрических соотношений или измерены, например, методом лазерного дальномера.
В качестве примера рассмотрим порядок расчета и геометрического преобразования размеров одного из реальных элементов сканирования, например (см. Фиг. 2) границы сканирования 7 на ближнем скане первого ближнего линейного фоточувствительного прибора 3. Граница сканирования 7 наблюдается ближним ЛФП 3 через объектив под острым углом α, измеряемым от направления 8 (луча) кратчайшего расстояния h до направления луча 9 на границу сканирования 7 (показано условно). Реальный размер расстояния R от точки пересечения направления 8 кратчайшего расстояния h с дорожным полотном на скане до границы сканирования 7 на дорожном полотне определяется по соотношениям прямоугольного треугольника.
R=h×tgα
Предпочтительно снабдить каждый ЛФП оптическими средствами 10 (объективами, линзами), установленными на транспортном средстве (ТС), что не меняет указанных соотношений, только при этом меняется масштаб изображения реального скана в соответствии с правилами линейной оптики.
Кратчайшее расстояние h на ближнем скане (см. Фиг. 2) может быть определено методом лазерного дальномера (на рисунках не показан). С помощью этого же метода могут быть измерены параметры расположения элементов сканирования на дальнем скане (см. Фиг. 5), кратчайшее расстояние до плоскости сканирования и определено их положение относительно осевой линии 6 дорожного полотна.
На Фиг. 2 условно показаны основания для геометрического преобразования. На каждом скане определяется кратчайшее расстояние h до пересечения плоскости сканирования (в общем случае это будет плоскость расположения и направления действия фоточувствительных элементов соответствующего ЛФП) с дорожным полотном.
На гиростабилизированной платформе 1 дополнительно устанавливают устройство лазерного дальномера (на рисунках не показан), которое предназначено для измерения реальных расстояний до различных элементов сканирования, например, таких как границы линий разметки и/или границы сканирования в плоскости сканирования на дорожном полотне 5 и острых углов, под которыми они наблюдаются из ЛФП по обе стороны от h соответственно слева и справа.
Сущность геометрического преобразования каждого скана следует из ранее представленных зависимостей и заключается в нижеследующем.
Из такого раздела геометрии, как тригонометрия известно, что в прямоугольном треугольнике противолежащий катет R равен произведению прилежащего катета h на тангенс соответствующего острого угла α. Следовательно, все расстояния до каждой соответствующей точки на скане будут функцией тангенса острого угла αi наблюдения этой точки. Таким образом можно для каждого фоточувствительного элемента линейного фоточувствительного прибора определить реальное или рассчитать смасштабированное положение на изображении дорожного полотна.
Способ первичной трассировки маршрута движения автоматического транспортного средства с помощью описанного устройства сканирования с ЛФП осуществляется в нижеследующей последовательности. Указанный способ трассировки маршрута движения автоматического транспортного средства не является предметом защиты в данном предложении, но позволяет понять и оценить полученные исходные данные, постоянно хранящиеся в долговременной памяти ЭВМ.
Перед началом движения ТС определяют лазерным дальномером эталонное, или измеряют другими средствами, или рассчитывают эталонное положение кратчайшего расстояния h до сканируемой поверхности дорожного полотна 5 по выбранному эталонному положению ТС на дорожном полотне 5 для обоих сканов. Такое эталонное положение выбирают или рассчитывают исходя из условия расположения гиростабилизированной платформы над ровной горизонтальной поверхностью дорожного полотна.
За эталонное положение ТС может быть выбрано любое определенное его положение на дорожном полотне, например, строго по осевой линии дорожного полотна симметрично обочинам или эксцентрично на выбранной полосе движения ТС. При этом соответственно определяется положение осевой линии, фактически это линия по которой движется АТС.
В исходных условиях ближний первый фоточувствительный прибор 3, предназначенный для получения ближнего скана, направляют перпендикулярно к дорожному полотну 5 и определяют его эталонное положение, отклонение от гировертикали, и по нему в дальнейшем определяют реальную высоту h ЛФП над негоризонтально расположенным дорожным полотном.
При этом реальное расстояние до дорожного полотна ближнего скана может быть равным эталонному при горизонтальном положении реального дорожного полотна или соответственно отличаться от него. При незначительных отклонениях его от гировертикали и изменении реального расстояния (в пределах ошибки измерения расстояния) эти изменения можно не учитывать.
Случайные изменения высоты при движении ТС над дорожным полотном, возникающие от вибраций из-за воздействия неровностей дорожного полотна или посторонних предметов на нем, могут быть скомпенсированы любым известным способом с помощью известных устройств или при математической обработке сканов, например, путем усреднения измерений траектории движения ТС любым известным методом.
Дальний ЛФП направляют под заданным эталонным углом γ к горизонтали, который является дополнительным для угла наблюдения плоскости сканирования и равен 90° минус угол между вертикалью и лучом направления наблюдения плоскости сканирования αнабi.
Перед началом движения ТС расстояние между ближним и дальним сканами по направлению осевой линии 6 разбивают на равные или пропорциональные участки (на чертежах не показано, так как это может быть выполнено по разным условиям, например, в соответствии с требованиями измерений отклонения осевой линии при повороте).
При этом за нулевую отметку соответственно принимают положение ближнего скана перед началом движения ТС.
Проводят эталонное сканирование одного заранее выбранного эталонного участка. Предпочтительно он должен быть прямой и горизонтально расположенный с одинаковыми по размерам элементами сканирования, что упрощает процесс юстировки.
На обоих сканах ближнем и дальнем эталонного сканирования пробного участка ставят синхронизированные отметки времени.
На обоих сканах ближнем и дальнем эталонного сканирования пробного участка ставят отметки пространственного положения.
Одновременно со сканированием фоточувствительными приборами методом лазерного дальномера определяют расстояние до границ сканирования и других элементов сканирования дорожного полотна в соответствующей плоскости сканирования.
Затем геометрически обрабатывают полученное изображение и при этом геометрически приводят к единому масштабу.
Повторно математически обрабатывают и получают изображение двух пробных участков, то есть смасштабированные в едином масштабе непрерывные эталонные изображения соответственно участков дорожного полотна с элементами сканирования соответственно у ближнего и дальнего сканов. В смасштабированных изображениях, синхронно полученных фоточувствительными приборами, выявляют одинаковые по размерам и форме элементы сканирования, например линии дорожной разметки.
При этом все элементы сканирования математически могут быть выявлены при помощи известных математических методов преобразования изображения, например методом Собеля, Хаара, Хафа или другими. Каждый из указанных методов имеет свое назначение и соответствующие результаты. Они широко известны и по этой причине подробное их описание не является необходимым.
Стандартные элементы сканирования имеют определенные стандартизованные размеры и стандартизованное взаимное положение (согласно требованиям установленным нормативными документами, например, такими как ГОСТ Р 51256-2011 (Технические средства организации дорожного движения. Разметка дорожная. Классификация. Технические требования), Правила Дорожного Движения, СНИПы и правила строительства дорожных сооружений и т.д.), что позволяет определить границы стандартных по размеру сканируемых элементов дорожной разметки на обоих эталонных участках, а по их стандартным размерам и взаимному положению, выявить и исключить вносящие ошибку мелкие и нестандартные дефекты дорожного полотна, например, такие как выбоины или битумированные трещины в дорожном полотне, после чего и сравнить элементы сканирования на двух указанных эталонных участках.
Выявленные однотипные и/или одинаковые по размерам стандартные элементы сканирования на реальных ближнем и дальнем сканах сравнивают и корректируют коэффициенты масштаба для получения реальных одинаковых смаштабированных размеров указанных элементов сканирования в пределах ошибок измерения этих элементов. При незначительном различии размеров, сопоставимых с ошибками измерений, масштабы ближнего и дальнего сканов принимаются равными. Это действие позволяет проверить правильность настройки и юстировки обоих ЛФП. Это действие позволяют провести также и повторную юстировку обоих ЛФП.
Результаты заносят в долговременную память ЭВМ. Они являются основой для получения формы дорожного полотна, расчета необходимых или записи реальных для выбранного скоростного режима управляющих воздействий на органы управления АТС, таких как отклонение от эталонного положения педали акселератора (движение с постоянной заданной скоростью по горизонтальной поверхности дорожного полотна), отклонение от нейтрали (от эталонного положения) и контроля реального места положения АТС на дорожном полотне.
Кроме этого описанным ниже способом можно определить пространственную форму дорожного полотна.
Для этого определяют текущее положение элементов сканирования и осевой линии в смасштабированном размере относительно кратчайшего расстояния до плоскости сканирования дальнего скана дорожного полотна, сравнивают с эталонными значениями и определяют изменение их положения в процессе текущего расчетного предполагаемого планируемого движения и по результатам сканирования (см. фиг.3 и 4). Текущие значения положения акселератора и руля сравнивают с потребными, то есть реальными, которые необходимы для заданного программой режима движения. При необходимости их корректируют, например, вследствие встречного или попутного ветра.
Кроме этого, чтобы определить реальное положение элементов сканирования в пространстве, сначала определяют их положение относительно осевой линии дорожного полотна для дальнего скана, сравнивают с эталонными значениями и определяют изменение положения в процессе движения и сканирования.
На Фиг. 3 и 4 показано, как по изменению кратчайшего расстояния до плоскости дальнего скана в его сравнении с эталонным или расчетным расстоянием L, полученным из условия горизонтального и прямого дорожного полотна, определяют уклон, подъем или поворот дорожного полотна в вертикальной и горизонтальной плоскостях. Эти значения формообразующих параметров дорожного полотна позволяют рассчитать управляющие воздействия на органы управления АТС, такие как рулевое управление, акселератор и тормоза, и последующее их изменение относительно эталонного, например, выбранного из условия отсутствия ветра, заданной скорости (лобового сопротивления), горизонтального расположения прямого дорожного полотна, что определяет неизменность выбранного за эталонные положения отклонение от нейтрали рулевого управления и от заданного эталонным режимом положения акселератора. При этом следует отметить, что в большинстве запланированных изменениях воздействия на органы управления АТС можно ограничиться ниже указанной последовательностью, так как, например (конечно, за исключением экстренного торможения) необходимого запланированного снижения скорости АТС можно добиться только снижением воздействия на акселератор, так как во всех современных двигателях предусмотрен режим принудительного холостого хода (выключения подачи топлива), то есть фактического торможения двигателем, что большей частью исключает необходимость воздействия на тормоза, как это часто делают водители в ралли рейдах.
Так же, как в предыдущем измерении перед началом движения определяют высоту гиростабилизированной платформы над дорожным полотном h и на его основе реальное или расчетное кратчайшее расстояние до эталонного L или текущего горизонтального дорожного полотна, полученное при заданном эталонном угле γ наклона к горизонтальной плоскости.
При уклоне расстояние будет увеличиваться, до величины L1 в точке 11, а при подъеме - уменьшаться до величины L2 в точке 12 (см. Фиг. 3). По непрерывному изменению отклонения величины кратчайшего расстояния до дальнего скана от величины эталонного расстояния (при увеличении определяют уклон, а при уменьшении - подъем) определяют величину и реальную пространственную конфигурацию изменения формы дорожного полотна в вертикальной плоскости исходя, конечно, из гипотетического условия прямолинейности дорожного полотна. По изменению формы дорожного полотна выбирают или рассчитывают текущее положение педали акселератора.
При перемещении вправо или влево точки кратчайшего расстояния в дальнем скане относительно точки пересечения с осевой линией (см. Фиг. 4), то есть по изменению положения точки 13 кратчайшего расстояния до плоскости дальнего скана Li относительно точки 14 пересечения осевой линией плоскости сканирования дорожного полотна определяют изменение и направление дорожного полотна (направление поворота) соответственно по направлению смещения точки 14 исходя, конечно, из гипотетического условия горизонтальности дорожного полотна. По изменению формы (исходя из гипотетического горизонтального положения дорожного полотна) определяют направление поворота и необходимый реальный угол поворота руля (угол отклонения от нейтрального положения).
Осевая линия 6 обычно располагается симметрично краям (обочинам) дорожного полотна с учетом суммарной ширины дорожного полотна, в которую должны входить все постоянно присутствующие элементы дорожного полотна или только реально исследуемых полос движения. Расположение осевой линии можно выбрать и по другим параметрам, например по выбранной полосе движения ТС. Текущее расположение осевой линии рассчитывается обратным геометрическим преобразованием и может быть сразу сравнено с реальным сканом. Осевая линия математически вычисляется для всех и каждого в отдельности элементов сканирования, позволяющих двигаться всем ТС в выбранном направлении, и исключает все элементы, запрещающие это движение согласно Правилам дорожного движения, такие как размещение и количество полос, с учетом знаков, разметки, разделительных сооружений, бордюров и обочин.
Фактически осевая линия является направляющей линией движения АТС.
По отклонению осевой линии от положения эталонного кратчайшего расстояния до дальнего скана в общем случае одновременно в двух плоскостях, горизонтальной и вертикальной, определяют величину, пространственную конфигурацию изменения и направление поворота дорожного полотна, и аналогично указанным выше действиям по изменению положения крайних точек дорожного полотна относительно точки кратчайшего расстояния и точки пересечения осевой линии с плоскостью сканирования дальнего скана определяют изменение направление поперечного уклона (формы виража) дорожного полотна соответственно в вертикальной и горизонтальной плоскостях. Это делают на основании аналогичных расчетов.
При достижении ближним сканом границы очередного участка ставят метку подтверждения, включающую отметки синхронизации и пространственного положения ближнего и дальнего сканов, и определяют расстояние до дальнего скана, на котором ставят отметку границы следующего участка, вычисляют и проверяют соответствие текущих из памяти ЭВМ и реальных значение. И так процесс повторяется необходимое число раз по каждому участку. При несоответствии все новые эталонные, текущие и реальные ближние и дальние сканы последовательно записывают в долговременную память.
По результатам перемещения по маршруту движения автоматического транспортного средства можно проводить синхронное сканирование на каждом расстоянии, по меньшей мере, в двух различных частотных диапазонах (ИК инфракрасный, видимый свет, УФ ультрафиолетовый, поляризованный свет и т.п.), что позволяет устранить влияние бликов и неравномерности отражающей и/или поглощающей способности поверхности дорожного полотна и повысить соответствие текущих и реальных значений формы дорожного полотна и текущих управляющих воздействий.
При перемещении по маршруту движения автоматического транспортного средства можно проводить контроль привязки сканов к местности, который можно производить по контрольным меткам на дорожном полотне, на обочине или дополнительных сооружениях (ограждениях, километровых или осветительных столбах), например, в виде катафотов - световозвращающих покрытий (которые могут быть в виде штрихкода), что упрощает привязку к местности и уточняет пространственное положение элементов разметки дорожного полотна и последующее управление АТС. Что особенно важно для магистралей, имеющих мало изменений формы и пространственного положения дорожного полотна.
Результаты заносят в долговременную память ЭВМ. Они являются основой для получения формы дорожного полотна и получения или расчета необходимых управляющих воздействий на органы управления АТС и контроля реального места положения АТС.
Предложенный способ управления автоматическим транспортным средством (АТС), реализуется в следующей последовательности действий и характеризуется тем, что из долговременной памяти ЭВМ извлекают математически обработанное изображение дорожного полотна с элементами сканирования, математически преобразуют его в соответствии с точкой наблюдения (положения АТС на дорожном полотне) в изображение в перспективе, получают реальное изображение дорожного полотна, математически преобразовывают реальное изображение дорожного полотна и получают изображения элементов сканирования, сравнивают изображения дорожного полотна с элементами сканирования с математически преобразованным реальным изображением дорожного полотна, по результатам вырабатывают управляющие действия для АТС, причем описанные выше текущие геометрически и математически обработанные изображения дорожного полотна с элементами сканирования, извлекаемые из долговременной памяти, и реальные изображения получены, по меньшей мере, из двух линейных фоточувствительных приборов (ЛФП), установленных на гиростабилизированной платформе, а последовательность действий по управлению АТС на основе их анализа включает подготовительный этап и этапы программы расчета текущего угла поворота руля, программы текущего управления педалью акселератора, определения наличия препятствий, построение изображения дорожного полотна и анализа его соответствия реальному.
Подготовительный этап включает извлечение из долговременной памяти в оперативное запоминающее устройство следующих данных:
Извлечение эталонного расположения элементов сканирования дорожного полотна;
Извлечение расположения элементов сканирования дорожного полотна для ближнего и дальнего сканов и промежуточных участков;
Извлечение текущего ближнего скана из памяти ЭВМ;
Извлечение текущего дальнего скана из памяти ЭВМ;
Извлечение промежуточных участков, расположенных между ближним и дальним сканами;
По завершении подготовительного этапа все необходимые и достаточные исходные данные, соответствующие отсканированным, необходимым и достаточным для сравнения и анализа и последующего получения управляющих воздействий на руль, акселератор и тормоза экстренного торможения или даже для изменения положения на дорожном полотне (маневра, который не рассматривается в данном случае подробно, так как предложенный способ предназначен в основном для использования в условиях массового применения АТС, которые не подвержены экстремальному стилю вождения, например, такому как «игра в шашечки») и обычно движутся строго параллельно одно другому.
Этап 1: Программа расчета текущего угла поворота руля
Сравнивают извлеченные из памяти ОЗУ ЭВМ эталонные и текущие положения
Пересечения текущим положением осевой линии текущего дальнего скана
Пересечения текущим кратчайшим расстоянием текущего дальнего скана
Если их положение совпадает, сравнивают с предыдущим, при их совпадении переходят к концу этапа, а при несовпадении к началу этапа.
При несовпадении сравнивают их по величине и увеличивают или уменьшают до расчетного или извлеченного из памяти ЭВМ значения
Полученное текущее значение угла поворота сравнивают с реальным
При совпадении заканчивают расчеты на этапе до следующей проверки по времени или положению в пространстве
Этап 2: Программа текущего управления педалью акселератора
Сравнивают эталонное положение педали акселератора с текущим
Если совпадает, то переходят к этапу 1
Если не совпадают, сравнивают с предыдущим текущим
При их совпадении сравнивают с реальным, при совпадении переходят к концу этапа
При несовпадении сравнивают их отношение
Если оно больше 1, уменьшают угол положения (снижают нагрузку на двигатель)
Если оно меньше 1, увеличивают угол положения (повышают нагрузку на двигатель)
Полученное текущее значение угла сравнивают с реальным, при их совпадении переходят к концу этапа
При несовпадении изменяют в необходимую сторону.
Этап 3: Определение наличия препятствий
Получают реальные дальний и ближний сканы
Извлекают соответствующие им текущие ближний и дальний
Преобразуют геометрически и математически реальные сканы
Сравнивают пары соответствующих ближних и дальних сканов
Устанавливают, есть ли на парах все элементы сканирования
При отсутствии, по меньшей мере, одного элементы сканирования включают и/или запрашивают данные от радара
При обнаружении препятствия определяют скорость сближения
Если скорость сближения выше установленной, переходят к экстренному торможению и переходят на этап 1
Если скорость сближения меньше установленной, переходят к началу этапа 3
При наличии всех элементов сканирования сравнивают их форму и размеры с реальными
Если несовпадение больше заданной величины, возвращаются к началу этапа 3
Если меньше, переходят к концу этапа
Этап 4: Построение текущего изображения дорожного полотна и анализа его соответствия реальному
Строят по текущим ближнему, дальнему и расположенным между ними промежуточным участкам методом геометрического преобразования текущий вид в соответствующей перспективе.
На полученном текущем виде определяют или строят ограничивающий вид контур
На реальном виде вырезают часть, ограниченную контуром, внешнюю лежащую за пределами контура удаляют
Оставшуюся часть преобразуют математически
Полученные текущий и реальный виды сравнивают
При незначительных несовпадениях элементов сканирования по форме, положению на дорожном полотне и/или размерам переходят к этапу 1
При значительном несовпадении элементов сканирования по форме, положению на дорожном полотне и/или размерам переходят к этапу 3
Технической задачей предложения является повышение вариабельности текущего изображения, получаемого из памяти ЭВМ, и повышение его адаптивности к реальным условиям и соответственно возможности сравнения с реальным математически обработанным и динамически меняющимся изображением, при минимизации объемов математических вычислений.
Описанная совокупность всех необходимых и достаточных существенных признаков, а именно последовательности действия с использованием необходимых технических средств, позволяет решить поставленную техническую задачу и достичь описанных выше технических результатов. Следовательно, предложение соответствует критериям охраноспособности «техническое решение задачи» и «изобретательский уровень», а отсутствие в известных заявителю источниках информации всех описанных существенных признаков, влияющих на достижение описанных технических результатов, позволяет утверждать, что предложение соответствует критерию охраноспособности «новизна».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ трассировки маршрута движения автоматического транспортного средства | 2016 |
|
RU2646771C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| Способ для адаптивного управления характеристиками движения высокоавтоматизированного транспортного средства в зависимости от уровня неопределенности в оценке окружающей ситуации | 2021 |
|
RU2783780C1 |
| Способ управления движением беспилотных автономных транспортных средств (БАТС) и колонн БАТС интеллектуальной транспортной инфраструктурой (ИТИ) автомобильной дороги | 2018 |
|
RU2712487C1 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ БОДРСТВОВАНИЯ ВОДИТЕЛЯ АВТОМОБИЛЯ | 2017 |
|
RU2671891C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ РАСПРЕДЕЛЕННОЙ КАЛИБРОВКИ СКАНЕРА ЗОНДОВОГО МИКРОСКОПА | 2005 |
|
RU2295783C2 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| СПОСОБ ВИДЕОКОНТРОЛЯ КАЧЕСТВА ПОВТОРА КВАЗИИДЕНТИЧНЫХ ОБЪЕКТОВ НА ОСНОВЕ СКОРОСТНЫХ АЛГОРИТМОВ СРАВНЕНИЯ ПЛОСКИХ ПЕРИОДИЧЕСКИХ СТРУКТУР РУЛОННОГО ПОЛОТНА | 2018 |
|
RU2688239C1 |
| СПОСОБ ВЫРАВНИВАНИЯ НЕРАВНОМЕРНОЙ ЧУВСТВИТЕЛЬНОСТИ ФОТОПРИЕМНИКОВ СКАНИРУЮЩИХ ЛИНЕЕК ТЕПЛОВИЗОРОВ | 1993 |
|
RU2113065C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
Изобретение относится к системам управления транспортным средством. В способе управления автоматическим транспортным средством из долговременной памяти ЭВМ извлекают математически обработанное изображение дорожного полотна с элементами сканирования, математически преобразуют его в изображение в перспективе, получают реальное изображение дорожного полотна, математически преобразовывают реальное изображение дорожного полотна и получают изображения элементов сканирования. Сравнивают изображения дорожного полотна с элементами сканирования с математически преобразованным реальным изображением дорожного полотна, по результатам вырабатывают управляющие действия для АТС. Текущие математически обработанные изображения дорожного полотна с элементами сканирования из долговременной памяти и реальные изображения получены по меньшей мере из двух линейных фоточувствительных приборов. Последовательность действий по управлению АТС на основе анализа включает подготовительный этап и этапы расчета текущего угла поворота руля, текущего управления педалью акселератора, определения наличия препятствий, построение изображения дорожного полотна и анализа его соответствия реальному. Достигается повышение безопасности управления транспортным средством. 9 ил.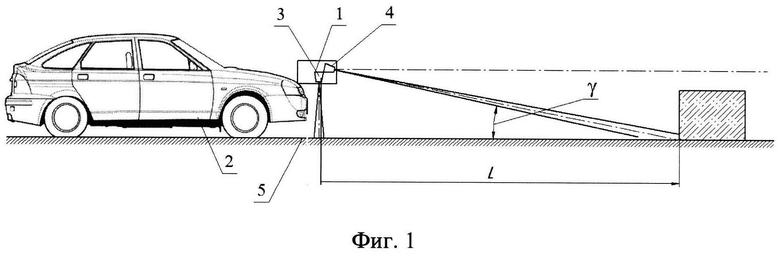
Способ управления автоматическим транспортным средством, характеризующийся тем, что из долговременной памяти ЭВМ извлекают математически обработанное изображение дорожного полотна с элементами сканирования, математически преобразуют его в соответствии с точкой наблюдения (положения АТС на дорожном полотне) в изображение в перспективе, получают реальное изображение дорожного полотна, математически преобразовывают реальное изображение дорожного полотна и получают изображения элементов сканирования, сравнивают изображения дорожного полотна с элементами сканирования с математически преобразованным реальным изображением дорожного полотна, по результатам вырабатывают управляющие действия для АТС, отличающийся тем, что текущие геометрически и математически обработанные изображения дорожного полотна с элементами сканирования из долговременной памяти и реальные изображения получены по меньшей мере из двух линейных фоточувствительных приборов (ЛФП), установленных на гиростабилизированной платформе, а последовательность действий по управлению АТС на основе их анализа включает подготовительный этап и этапы программы расчета текущего угла поворота руля, программы текущего управления педалью акселератора, определения наличия препятствий, построение изображения дорожного полотна и анализа его соответствия реальному:
подготовительный этап: извлечение из долговременной памяти в оперативное запоминающее устройство;
извлечение эталонного расположения элементов сканирования дорожного полотна;
извлечение расположения элементов сканирования дорожного полотна для ближнего и дальнего сканов и промежуточных участков;
извлечение текущего ближнего скана из памяти ЭВМ;
извлечение текущего дальнего скана из памяти ЭВМ;
извлечение промежуточных участков, расположенных между ближним и дальним сканами;
этап 1: Программа расчета текущего угла поворота руля;
сравнивают извлеченные из памяти ЭВМ эталонные и текущие положения;
пересечения текущим положением осевой линии текущего дальнего скана;
пересечения текущим кратчайшим расстоянием текущего дальнего скана;
если их положение совпадает сравнивают с предыдущим: при их совпадении переходят к концу этапа, а при несовпадении к началу этапа;
при несовпадении сравнивают их по величине и увеличивают или уменьшают до расчетного или извлеченного из памяти ЭВМ значения;
полученное текущее значение угла поворота сравнивают с реальным;
при совпадении заканчивают расчеты на этапе до следующей проверки по времени или положению в пространстве;
этап 2: Программа текущего управления педалью акселератора;
сравнивают эталонное положение педали акселератора с текущим;
если совпадает, то переходят к этапу 1;
если не совпадают, сравнивают с предыдущим текущим;
при их совпадении сравнивают с реальным и при совпадении переходят к концу этапа;
при несовпадении сравнивают их отношение;
если оно больше 1, уменьшают угол положения (снижают нагрузку на двигатель);
если оно меньше 1, увеличивают угол положения (повышают нагрузку на двигатель);
полученное текущее значение угла сравнивают с реальным, при их совпадении переходят к концу этапа;
при несовпадении изменяют в необходимую сторону;
этап 3: Определение наличия препятствий;
получают реальные дальний и ближний сканы;
извлекают соответствующие им текущие ближний и дальний;
преобразуют геометрически и математически реальные сканы;
сравнивают пары соответствующих ближних и дальних сканов;
устанавливают, есть ли на парах все элементы сканирования;
при отсутствии по меньшей мере одного элемента сканирования включают и/или запрашивают данные от радара;
при обнаружении препятствия определяют скорость сближения;
если скорость сближения выше установленной, переходят к экстренному торможению и переходят на этап 1;
если скорость сближения меньше установленной, переходят к началу этапа 3;
при наличии всех элементов сканирования сравнивают их форму и размеры с реальными;
если несовпадение больше заданной величины, возвращаются к началу этапа 3;
если меньше, переходят к концу этапа;
этап 4: Построение текущего изображения дорожного полотна и анализа его соответствия реальному;
строят по текущим ближнему, дальнему и расположенным между ними промежуточным участкам методом геометрического преобразования текущий вид в соответствующей перспективе;
на полученном текущем виде определяют или строят ограничивающий вид контур;
на реальном виде вырезают часть, ограниченную контуром, внешнюю лежащую за пределами контура удаляют;
оставшуюся часть преобразуют математически;
полученные текущий и реальный виды сравнивают;
при незначительных несовпадениях элементов сканирования по форме, положению на дорожном полотне и/или размерам переходят к этапу 1;
при значительном несовпадении элементов сканирования по форме, положению на дорожном полотне и/или размерам переходят к этапу 3.
| JP 2011040993 A, 24.02.2011 | |||
| JP 2012108798 A, 07.06.2012 | |||
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ СЕЛЬХОЗМАШИН И АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2424642C2 |

