Изобретение относится к способам испытаний многозвенных механических систем, преимущественно космических аппаратов, на функционирование и может быть использовано в ракетно-космической технике при проведении наземной отработки конструкций космических аппаратов.
Известен способ испытаний многозвенной механической системы на функционирование (патент RU №2252407 С1, кл. G01M 19/00), заключающийся в том, что космический аппарат устанавливают с возможностью раскрытия звеньев механической системы, соединенной с приводами раскрытия в вертикальной плоскости. Каждое звено механической системы крепят посредством пружин обезвешивания к поворотной балочной системе (элементам системы обезвешивания) и проводят регулировку усилия натяжения пружин обезвешивания (определенного заранее при взвешивании панели батареи солнечной) при раскрытом положении звеньев механической системы. Закрывают звенья, фиксируют звенья к корпусу космического аппарата и выполняют последовательное раскрытие звеньев механической системы с помощью приводов раскрытия. Регулировка усилия натяжения каждой пружины обезвешивания обеспечивает установку верхнего торца каждого звена механической системы в горизонтальную плоскость с точностью не выше 0,4°, а раскрытие звеньев механической системы производят при усилиях, создаваемых приводами раскрытия, превышающими соответствующие номинальные усилия раскрытия не менее чем на 30%.
Недостатком данного способа испытаний многозвенной механической системы на функционирование является то, что:
- необходимо взвешивать каждое звено механической системы для определения необходимого усилия натяжения соответствующих пружин обезвешивания, что подразумевает появление дополнительных операций при подготовке к испытаниям;
- способ регулировки усилия натяжения каждой пружины приводит к появлению погрешностей обезвешивания, создающих силы сопротивления в узлах разворота звеньев механической системы, не связанных с ее штатным функционированием;
- силы сопротивления раскрытию звеньев механической системы, возникающие при их обезвешивании, преодолеваются за счет превышения номинального (штатного) усилия, создаваемого приводами раскрытия многозвенной механической системы.
Задачами изобретения является:
- сокращение времени и трудоемкости подготовки многозвенной механической системы к испытаниям;
- повышение качества обезвешивания многозвенной механической системы;
- повышение качества испытаний многозвенной механической системы космического аппарата на функционирование.
Поставленные задачи предлагаемого изобретения достигаются способом испытаний многозвенной механической системы космического аппарата на функционирование, заключающимся в том, что космический аппарат, содержащий корпус с закрепленной на нем многозвенной механической системой, с приводами раскрытия, устанавливают с возможностью раскрытия звеньев механической системы в вертикальной плоскости на системе обезвешивания, согласно изобретению регулируют усилия натяжения каждой пружины обезвешивания в раскрытом или сложенном положении механической системы, используют значения масс и положения центров масс звеньев механической системы, полученных теоретическим или практическим путем, переводят многозвенную механическую систему в сложенное положение, фиксируют на корпусе космического аппарата, или в раскрытое положение, если регулировка усилия пружин проходила в сложенном положении, и снимают значения усилий натяжения пружин обезвешивания в соответствующем положении, рассчитывают значения усилия для регулировки натяжения пружины обезвешивания каждого звена, соответствующее реальному весу элемента механической системы, затем, в случае, если механическая система в раскрытом положении, переводят ее в сложенное положение и фиксируют на корпусе космического аппарата, затем проводят перенастройку пружин обезвешивания на полученные после расчета значения, после чего проводят испытание многозвенной механической системы на раскрытие.
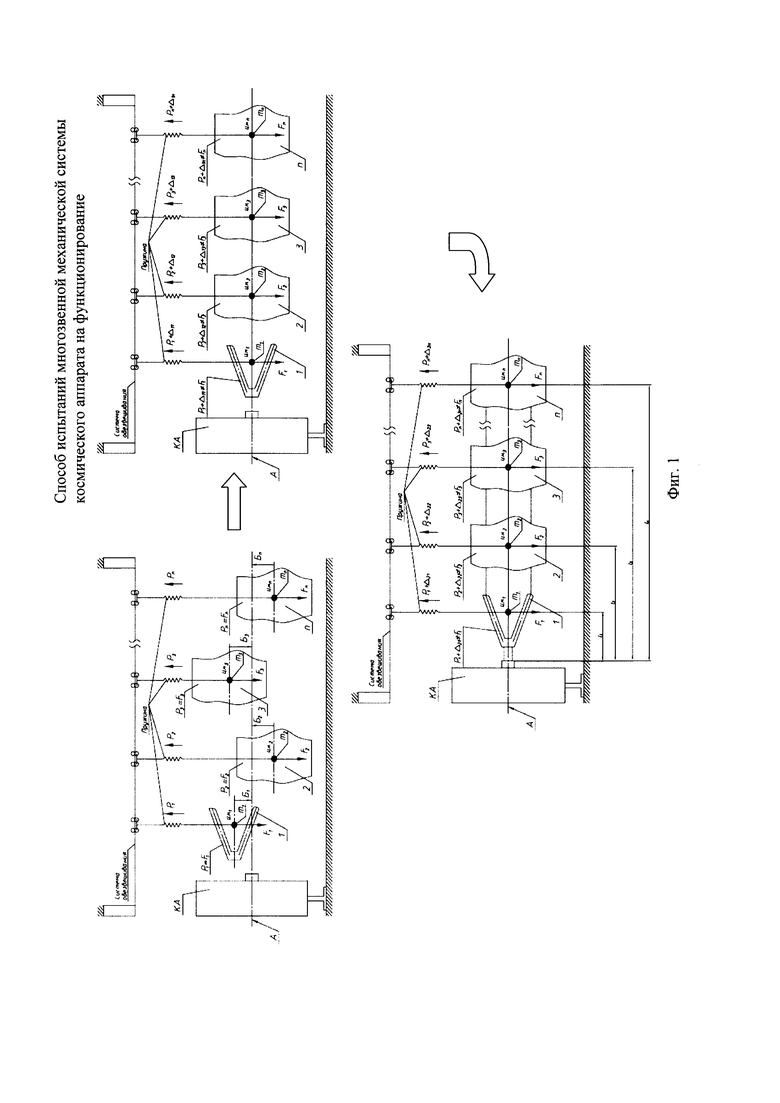
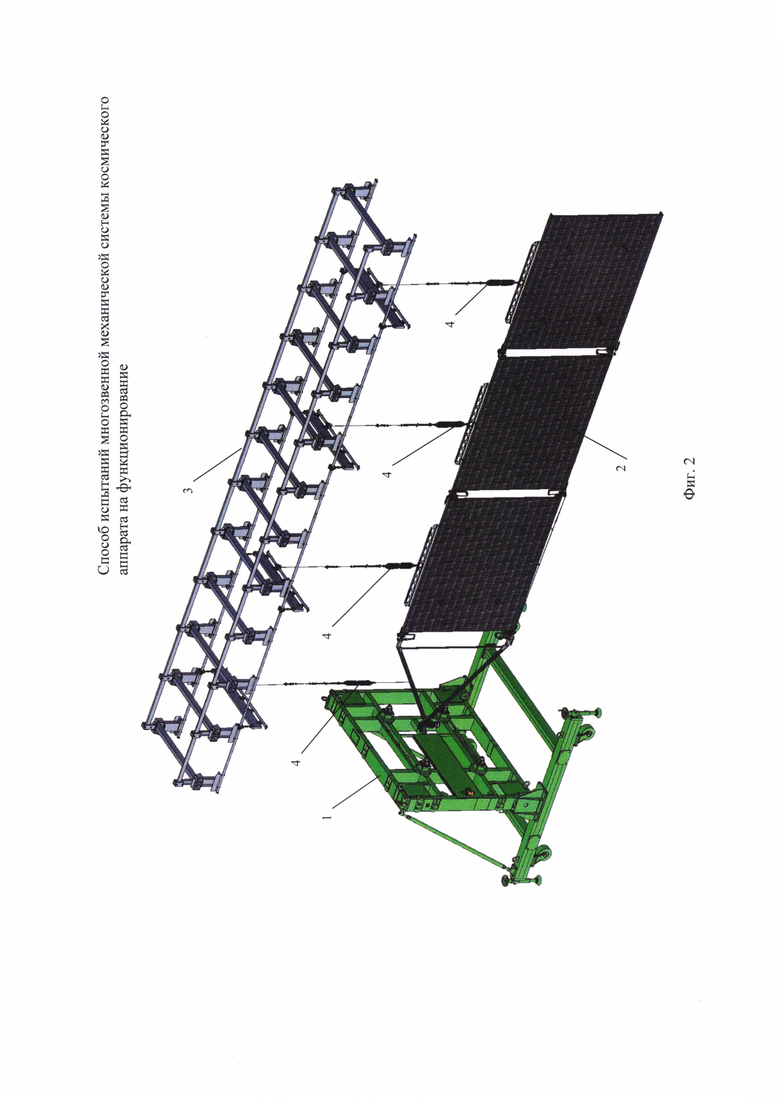
Способ испытаний многозвенной механической системы космического аппарата на функционирование поясняется чертежами, где на фиг. 1 изображен порядок появления несбалансированной механической системы, на фиг. 2 изображена многозвенная механическая система.
Условие обезвешивания элемента сбалансированной механической системы имеет вид:
Р=Рр=Рсл, ,
где Р - значение усилия для регулировки натяжения пружины обезвешивания элемента соответствующее реальному весу элемента;
Рр - значение усилия натяжения пружины обезвешивания в точке подвеса звена в раскрытом положении механической системы;
Рсл - значение усилия натяжения пружины обезвешивания в точке подвеса звена в сложенном положении механической системы;
В случае если Р≠Рр≠Рсл, то это означает, что система не сбалансирована и возникает взаимовлияние элементов многозвенной механической системы друг на друга, что является следствием появления погрешности их обезвешивания. Это происходит, если несколько элементов поз. 1, 2, 3…n (фиг. 1) с массой m1, m2, m3…mn, полученной теоретическим или практическим путем, не связанных между собой и космическим аппаратом (КА), подвесить на пружинах, входящих в систему обезвешивания, с некоторым отклонением от заданной горизонтальной плоскости А (фиг. 1), при этом усилие Р1, Р2, Р3…Pn, создаваемое пружинами, будет равняться весу элементов F1, F2, F3…Fn, затем переместить эти элементы в конструктивно необходимое положение в направлениях Б1, Б2, Б3…Бn (фиг. 1) (данное состояние будет эквивалентно сложенному и зафиксированному положению механической системы на корпусе КА), что приведет к появлению погрешности обезвешивания Δ11, Δ12, Δ13…Δ1n, т.е. P1+Δ11≠F1, Р2+Δ12≠F2, Р3+Δ13≠F3…Pn+Δ1n≠Fn, потом соединить между собой и космическим аппаратом, создавая общую для элементов поз. 1, 2, 3…n механическую систему, в результате чего возникнут Δ21, Δ22, Δ23…Δ2n, которые являются следствием влияния Δ11, Δ12, Δ13…Δ1n на соответствующий элемент, т.е. Р1+Δ21≠F1, Р2+Δ22≠F2, Р3+Δ23≠F3…Pn+Δ2n≠Fn, при этом l1, l2, l3…ln являются расстоянием, полученным теоретическим или практическим путем, от стыка механической системы с КА до положения центра масс Ц.м1, Ц.м2, Ц.м3…Ц.м1. Как следствие, несбалансированность системы приводит к появлению сил сопротивления раскрытию элементов, возникающих при их раскрытии, преодолеваемых за счет номинального (штатного) усилия приводов раскрытия механической системы.
В результате, для выполнения условия Р1=Рр1=Рсл1, Р2=Рр2=Рсл2, Р3=Рр3=Рсл3…Pn=Ppn=Рслn, необходимо исключить появление погрешностей при обезвешивании элементов данной системы, определив тем самым Р1, Р2, Р3…Pn и отрегулировав соответствующие пружины обезвешивания элементов системы на полученные значения.
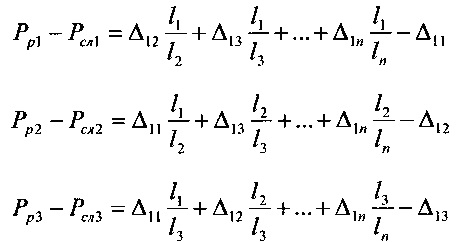
Так как Р≠Рр≠Рсл и в соответствии с фиг. 1, то для каждого элемента Pp1=P1+Δ21, Рр2=Р2+Δ22, Pp3=P3+Δ23…Ppn=Pn+Δ2n, Pсл1=P1+Δ11, Pсл2=P2+Δ12, Pсл3=P3+Δ13…Pслn=Pn+Δ1n. Следовательно, разница усилий натяжения пружин каждого элемента в раскрытом и сложенном положении механической системы имеет вид:

где Δ21, Δ22, Δ23…Δ2n определяется следующим образом:

Для определения Δ11, Δ12, Δ13…Δ1n необходимо решить систему уравнений:
После определения величины погрешностей обезвешивания соответствующего элемента механической системы необходимо произвести регулировку усилия пружин обезвешивания, исключающую эти погрешности, при этом опыт эксплуатации многозвенных механических систем показывает, что трудоемкость операции по регулировке в раскрытом положении значительно выше, чем в сложенном положении. Это объясняется тем, что требуется многократная последовательная настройка необходимого усилия в условиях их кинематического несбалансированного взаимовлияния (выставка длины пружины одного звена механической системы приводит к изменению длин пружин других звеньев этой механической системы). Следовательно, значение Р1, Р2, Р3…Pn, на которое необходимо отрегулировать соответствующую пружину обезвешивания, необходимо определять в сложенном положении, так как все элементы зафиксированы и изолированы друг от друга:

После чего для каждого звена будет справедливо условие Р1=Рp1=Рсл1, P1=Pp1=Рсл1, Р1=Рp1=Рсл1…Р1=Рp1=Рсл1. При этом номинальное (штатное) усилие создаваемого приводами раскрытия многозвенной механической системы не тратится на преодоление сил сопротивления раскрытию элементов механической системы, возникающих при раскрытии несбалансированной механической системы, так как их нет.
Проверку функционирования механической системы космического аппарата предлагаемым способом проводить следующим образом:
- космический аппарат (технологическое приспособление) 1 (фиг. 2) установить под систему обезвешивания 3 (фиг. 3) и закрепить на нем в раскрытом или сложенном положении механическую систему 2 (фиг. 2);
- каждый элемент механической системы 2 соединить посредством пружин обезвешивания 4 (фиг. 2) с соответствующим элементом системы обезвешивания 3, при этом точка закрепления должна соответствовать положению центра масс, определенному практически или теоретически;
- провести регулировку усилия натяжения каждой пружины обезвешивания 4 в раскрытом или в сложенном положении элементов механической системы 2, используя значения масс элементов механической системы 2, определенных практически или теоретически;
- перевести механическую систему 2 в сложенное положение, зафиксировать на корпусе космического аппарата (технологического приспособления) 1 или в раскрытое положение, в зависимости от того в каком положении происходила регулировка усилия натяжения пружин обезвешивания 4, и снять вновь полученные значения усилий натяжения пружин обезвешивания 4 каждого элемента механической системы 2;
- рассчитать значение усилия для регулировки натяжения пружины обезвешивания 4 элемента механической системы 2, соответствующее реальному весу элемента (если механическая система в раскрытом положении, то перевести ее в сложенное положение, фиксируя на корпусе космического аппарата (технологического приспособления)) 1, и провести перенастройку пружин обезвешивания 4 на полученные значения.
- произвести перевод звеньев механической системы 2 в рабочее положение с помощью ее приводов раскрытия (не показаны), создавая при этом усилия на приводах раскрытия, не превышающие номинальные (расчетные) усилия раскрытия.
Предлагаемый способ испытаний многозвенной механической системы космического аппарата на функционирование позволяет:
- сократить время и уменьшить трудоемкость подготовки испытания;
- повысить качество обезвешивания механических систем;
- уменьшить величину сил сопротивления раскрытия за счет повышения качества обезвешивании звеньев механической системы и, как следствие, исключить увеличение номинального (штатного) усилия, создаваемого приводами раскрытия многозвенной механической системы для преодоления этих сил сопротивления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ | 2018 |
|
RU2714283C1 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ | 2003 |
|
RU2252407C1 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2293961C2 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ГОРИЗОНТАЛЬНО ПЕРЕМЕЩАЮЩЕЙСЯ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2376217C1 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516880C2 |
| СПОСОБ ОБЕЗВЕШИВАНИЯ ТРАНСФОРМИРУЕМЫХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2711774C2 |
| СТЕНД РАСКРЫТИЯ ПАНЕЛЕЙ СОЛНЕЧНОЙ БАТАРЕИ | 2011 |
|
RU2483991C1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ КОСМИЧЕСКИХ АППАРАТОВ ПРИ НАЗЕМНЫХ ИСПЫТАНИЯХ | 2020 |
|
RU2744925C1 |
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ | 2014 |
|
RU2565807C2 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ РАСКРЫТИЯ БАТАРЕИ СОЛНЕЧНОЙ | 2010 |
|
RU2468969C2 |
Изобретение относится к наземным механическим испытаниям систем космического аппарата (КА). Для испытаний используют систему обезвешивания, связанную пружинами со звеньями отрабатываемой механической системы КА (например, солнечной батареи). При обезвешивании исключают взаимовлияния звеньев, регулируя усилия натяжения пружин. Затем производят раскрытие механической системы при штатных усилиях приводов раскрытия. Техническим результатом изобретения являются сокращение времени и уменьшение трудоемкости подготовки испытаний, повышение качества обезвешивания и уменьшение тем самым сил сопротивления раскрытию, преодолеваемых приводами раскрытия. 1 з.п. ф-лы, 2 ил.
1. Способ испытаний многозвенной механической системы космического аппарата на функционирование, заключающийся в том, что космический аппарат, содержащий корпус с закрепленной на нем многозвенной механической системой, с приводами раскрытия, устанавливают с возможностью раскрытия звеньев механической системы в вертикальной плоскости на системе обезвешивания, отличающийся тем, что регулируют усилия натяжения каждой пружины обезвешивания в раскрытом или сложенном положении механической системы, используя значения масс и положения центров масс звеньев механической системы, полученные теоретическим или практическим путем, переводят многозвенную механическую систему в сложенное положение и фиксируют на корпусе космического аппарата или в раскрытое положение, если регулировка усилия пружин проходила в сложенном положении, и снимают значения усилий натяжения пружин обезвешивания в соответствующем положении, рассчитывают значение усилия для регулировки натяжения пружины обезвешивания каждого звена, соответствующее реальному весу элемента механической системы, затем, в случае, если механическая система в раскрытом положении, переводят ее в сложенное положение и фиксируют на корпусе космического аппарата, затем проводят перенастройку пружин обезвешивания на полученные после расчета значения, после чего проводят испытание многозвенной механической системы на раскрытие.
2. Способ испытаний многозвенной механической системы космического аппарата на функционирование по п. 1, отличающийся тем, что при испытании многозвенной механической системы на раскрытие создают усилия на приводах раскрытия, не превышающие номинальные усилия, необходимые для раскрытия.
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ | 2003 |
|
RU2252407C1 |
| ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЕ КОЛЬЦО | 2003 |
|
RU2252159C2 |
| US 5110294 А, 05.05.1992 | |||
| US 3281964 А, 01.11.1966 | |||
| Способ измерения светового потока лавинным фотодиодом и устройство для его осуществления | 1984 |
|
SU1244505A1 |

