Изобретение относится к робототехнике, а именно к автоматическим мобильным роботам, и может быть использовано для имитации невесомости при наземных испытаниях на функционирование подвижных элементов космических аппаратов, в частности, крыльев солнечных батарей.
Известно устройство для обезвешивания горизонтально перемещающейся многозвенной механической системы космического аппарата [RU 2376217 С1, МПК B64G 7/00 (2006.01), B64G 5/00 (2006.01), опубл. 20.12.2009], содержащее раму, закрепленную в верхней части космического аппарата и снабженную секционной штангой. Штанга связана посредством вертикально установленных регулируемых пружин обезвешивания с горизонтально перемещающимися звеньями многозвенной механической системы. Звенья уложены W-образно («гармошкой»). На закрепленных между собой секциях штанги горизонтально подвешен направляющий трос. Один конец троса закреплен на секции, наименее удаленной от космического аппарата, а другой конец посредством механизма натяжения связан с наиболее удаленной от космического аппарата секцией. Регулируемые пружины взаимодействуют посредством опорных элементов с направляющим тросом, имея возможность перемещения по тросу. Направляющий трос в плане находится над звеньями механической системы в их рабочем положении. Регулируемые пружины связаны со звеньями в точках, расположенных в вертикальных плоскостях симметрии этих звеньев. На раме вертикально закреплена П-образная разгрузочная арка, две стойки которой закреплены в нижней части космического аппарата. Многозвенная механическая система в плане находится между стойками П-образной арки.
Известна система имитации невесомости многозвенных механизмов [RU 2402470 С2, МПК G01M 19/00 (2006.01), опубл. 27.10.2010], содержащая блок управления, в состав которого входят персональный компьютер, микроконтроллер и соответствующее программное обеспечение. Система содержит три исполнительных механизма, каждый из которых состоит из весоизмерительной ячейки, соединенной с платформой с датчиком угла горизонтального отклонения стропа и электроприводом, редуктор которого связан с катушкой, на которой намотан строп, идущий на тросоукладчик, на котором установлены датчик угла, определяющий его вертикальное отклонение, и датчик расхода стропа. Концы стропа с исполнительных механизмов соединяются, образуя точку подвеса обезвешиваемого элемента. Исполнительные механизмы установлены на координатную сетку.
Указанные устройства имеют сложную конструкцию, для монтажа и настройки которых требуются большие временные затраты.
Известно устройство для свободного трехмерного перемещения [US 5501114A, МПК B64G7/00, опубл. 26.03.1996], содержащее плавающую доску, с закрепленными на ней газовым подшипником, вертикальной телескопической опорной стойкой, и соединенной с ремнем для создания балансира. Трехосевой поворотный механизм верхней части опорной стойки служит креплением обезвешиваемого объекта. Движение плавающей доски осуществляется за счет движения обезвешиваемого объекта.
Известно устройство для обезвешивания горизонтально раскрываемых панелей солнечных аппаратов, принятое за прототип, которое использовалось для обезвешивания крыльев солнечных батарей космического аппарата MAVEN при их наземных испытаниях компанией Lockheed Martin Space Systems в марте 2013 г. [Ken Kremer. MAVEN Takes Final Test Spins, Flexes Solar Panels Before Imminent Trek to Florida Launch Site http://www.universetoday.com/103858/ maven-takes-final-test-spins-flexes-solar-panels-before-imminent-trek-to-florida-launch-site/].
Устройство содержит платформу на поворотных колесах, которая способна пассивно перемещаться в любом горизонтальном направлении и вращаться вокруг своей оси. В платформу встроены дисковой формы пневматические опоры с поддувом, которые становятся воздушными подушками за счет подачи в них по трубопроводам под давлением сжатого воздуха от отдельно расположенного компрессора или баллона со сжатым воздухом. В центре платформы жестко установлена вертикальная опорная стойка для поддержания обезвешиваемого крыла солнечной батареи. В месте прикрепления крыла к опорной стойке встроен датчик силы, который используется в процессе обезвешивания и раскрытия крыльев солнечных батарей для управления создаваемой с помощью пневматического устройства компенсации веса обезвешиваемого крыла солнечной батареи.
Это устройство обеспечивает пассивно-активное обезвешивание крыла солнечной батареи, при котором активным является лишь поддержание на требуемом уровне силы, необходимой для обезвешивания. Перемещение же платформы осуществляется за счет движения обезвешиваемого крыла солнечной батареи, то есть возникает нежелательный «эффект присоединенных масс», который увеличивает инерционность обезвешиваемого крыла.
Технический результат, достигаемый заявляемым изобретением, заключается в создании устройства, позволяющего обезвешивать элементы космического корабля и при этом устранять инерционность обезвешиваемого элемента, вызванную «эффектом присоединённых масс».
Предложенное устройство для обезвешивания элементов космических аппаратов при наземных испытаниях так же как в прототипе содержит платформу на колесах, выполненную с возможностью перемещения в любом направлении и вращения вокруг своей оси, вертикальную опорную стойку, верхняя часть которой предназначена для крепления обезвешиваемого элемента, устройство компенсации веса и датчик силы.
Согласно изобретению в устройстве для обезвешивания элементов космических аппаратов при наземных испытаниях использована мобильная робототехническая платформа на всенаправленных колесах, каждое из которых оснащено отдельным электроприводом, который подключен к источнику питания через контроллер. На платформе закреплено устройство компенсации веса. На нижнем торце вертикальной опорной стойки установлена шариковая опора с возможностью свободного перемещения по горизонтальной опорной доске, на которой закреплено устройство определения положения опорной стойки. Горизонтальная опорная доска через датчик силы закреплена на устройстве компенсации веса. Датчик силы, устройство компенсации веса и устройство определения положения опорной стойки подключены к контроллеру и источнику питания.
В качестве всенаправленных колес использованы или Omni – колеса, или колеса Илона.
В качестве устройства компенсации веса использован линейный электрический привод, установленный вертикально.
Устройство определения положения опорной стойки выполнено в виде прямоугольной рамки, на двух внутренних смежных вертикальных стенках которой на равном расстоянии друг от друга установлены фотоизлучатели, а на противоположных стенках – фотоприемники, причем фотоизлучатели и фотоприемники установлены напротив друг друга. Фотоизлучатели подключены друг к другу параллельно и соединены с источником питания, а фотоприемники соединены с контроллером.
Обезвешивание элемента космического аппарата предложенным устройством достигается за счет создания усилия устройством компенсации веса. Устранение инерционности, вызванной «эффектом присоединённых масс», осуществляется за счет использования не жесткого, как в прототипе, а скользящего соединения между устройством обезвешивания и обезвешиваемым элементом космического корабля при помощи шариковой опоры. То есть в прототипе движение платформы на колесах осуществляется принудительно движением обезвешиваемого элемента, а в предлагаемом устройстве, мобильная робототехническая платформа движется самостоятельно за счет собственных электроприводов и не препятствует движению обезвешиваемого элемента.
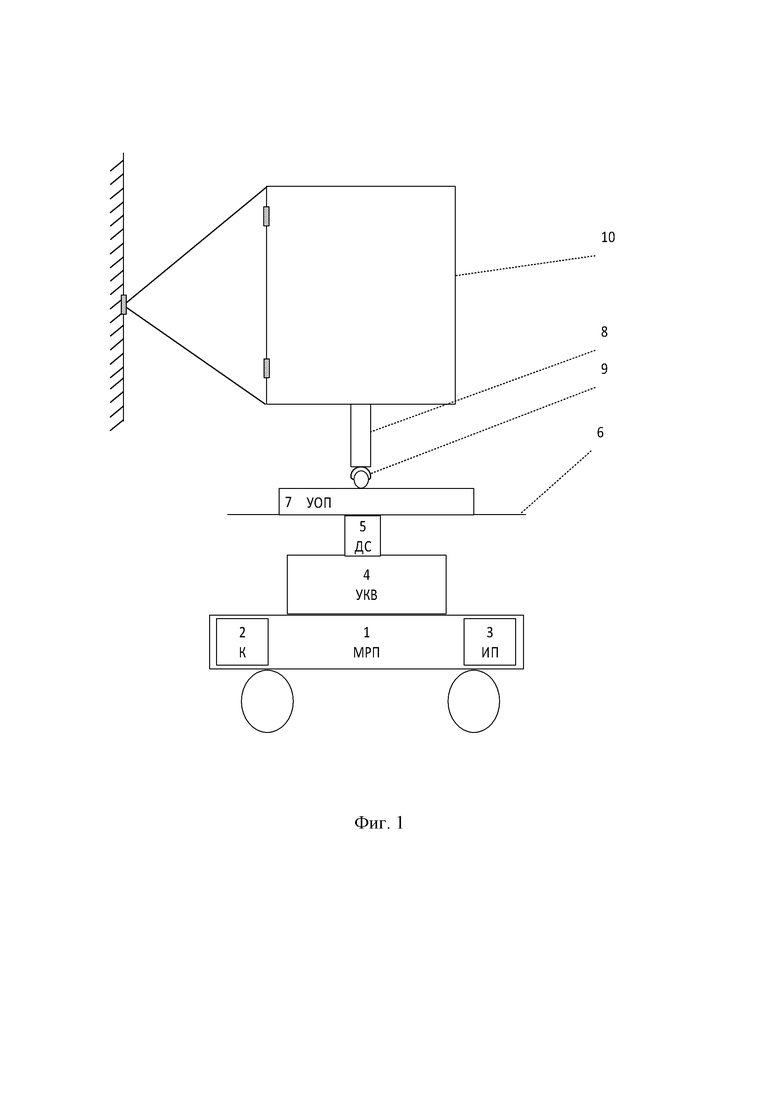
На фиг. 1 представлен общий вид заявляемого устройства.
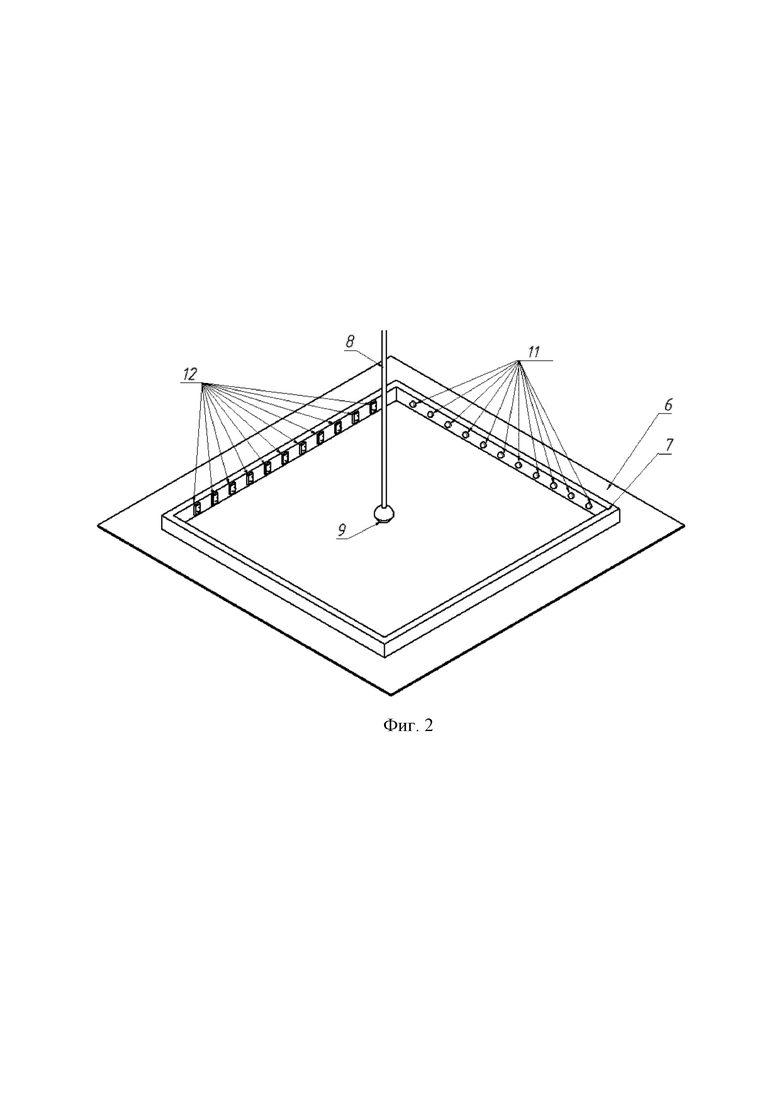
На фиг. 2 показано устройство определения положения опорной стойки.
Устройство для обезвешивания элементов космических аппаратов содержит мобильную робототехническую платформу 1 на Omni – колесах или колесах Илона, которая содержит контроллер 2 (К) и источник питания 3 (ИП), связанные между собой. Каждое колесо соединено с персональным, электроприводом, которые через контроллер 2 (К) соединены с источником питания 3 (ИП). В качестве мобильной робототехнической платформы 1 может быть использована мобильная робототехническая платформа фирмы KUKA YouBot. На мобильной робототехнической платформе 1 установлено устройство компенсации веса 4 (УКВ), например, линейный электрический привод EGSK фирмы Festo, установленный вертикально, над которым через датчик силы 5 (ДС) закреплена горизонтальная опорная доска 6, выполненная, например, в виде металлического листа прямоугольной формы. На опорной доске 6 сверху закреплено устройство определения положения 7 (УОП) опорной стойки 8, которая вертикально размещена на ней.
Вертикальная опорная стойка 8 выполнена в виде полой металлической трубы, на нижнем торце которой установлена шариковая опора свободного перемещения 9. На верхнем конце стойки 8 расположен П-образный кронштейн для крепления обезвешиваемого элемента 10 космического аппарата.
В качестве датчика силы 5 (ДС) может быть использован датчик силы растяжения и сжатия DACELLTX25. В качестве источника питания 3 (ИП), может быть выбрана, например, литий-ионная аккумуляторная батарея фирмы LiitoKala 24V 6Ah.
Устройство определения положения 7 (УОП) опорной стойки 8 (фиг. 2) может быть выполнено, например, в виде прямоугольной рамки, на двух внутренних смежных вертикальных стенках которой на равном расстоянии друг от друга установлены фотоизлучатели 11, например, инфракрасные диоды BL-L314IRBB, а на противоположных внутренних вертикальных стенках – фотоприемники 12, например, инфракрасные приемники TSOP31230. Фотоизлучатели 11 и фотоприемники 12 установлены напротив друг друга. Фотоизлучатели 11 подключены друг к другу параллельно и соединены с источником питания 3 (ИП). Фотоприемники 12 соединены с информационными входами контроллера 2 (К). Устройство компенсации веса 4 (УКВ) и датчик силы 5 (ДС) подключены к контроллеру 2 (К).
К обезвешиваемому элементу 10, например, панели солнечной батареи, соединенной с моделью космического аппарата с помощью П-образного кронштейна прикрепляют вертикальную опорную стойку 8. Шариковую опору 9 вертикальной опорной стойки 8 размещают внутри прямоугольной рамки устройства определения положения опорной стойки 7 (УОП).
При помощи элементов раскрытия, установленных на космическом аппарате, возникает воздействие, приводящее в движение обезвешиваемый элемент 10, в процессе движения которого происходит перемещение вертикальной опорной стойки 8 за счет свободного движения шариковой опоры 9 по опорной доске 6. Каждый фотоизлучатель 11 отправляет световой луч на соответствующий ему фотоприемник 12. В процессе движения опорной стойки 8 шариковая опора свободного перемещения 9 перекрывает световой луч от фотоизлучателя 11 и сигнал с соответствующего фотоприемника 12 передаётся на контроллер 2, который зная позиции всех фотоприемников 12 передает управляющие сигналы для движения мобильной робототехнической платформы 1 на колесах Илона или на omni-колесах в необходимом направлении. За счет перемещения мобильной робототехнической платформы 1 относительно обезвешиваемого элемента 10 опорная стойка 8 перемещается в центр опорной доски 6.
В это же время датчик силы 5 (ДС) определяет вес обезвешиваемого элемента 10 и передает информацию на контроллер 2 (К), который формирует управляющий сигнал для устройства компенсации веса 4 (УКВ), которое увеличивает или уменьшает высоту подъема опорной доски 6 так, чтобы полностью скомпенсировать вес обезвешиваемого элемента 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ проведения модальных испытаний многосегментных нежестких конструкций | 2017 |
|
RU2662255C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ПРЕЦИЗИОННЫХ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2733012C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО С ТРОСОБЛОЧНОЙ СИСТЕМОЙ ДЛЯ ОБЕЗВЕШИВАНИЯ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2721448C1 |
| СТЕНД РАСКРЫТИЯ ПАНЕЛЕЙ СОЛНЕЧНОЙ БАТАРЕИ | 2011 |
|
RU2483991C1 |
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ | 2014 |
|
RU2565807C2 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516880C2 |
| Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления | 2017 |
|
RU2677942C2 |
| СПОСОБ ОБЕЗВЕШИВАНИЯ ТРАНСФОРМИРУЕМЫХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2711774C2 |
| Всенаправленная беговая дорожка с системой обезвешивания | 2023 |
|
RU2818503C1 |
Изобретение относится к робототехнике, а именно к автоматическим мобильным роботам, и может быть использовано для имитации невесомости при наземных испытаниях на функционирование подвижных элементов космических аппаратов, в частности крыльев солнечных батарей. Устройство содержит мобильную робототехническую платформу на всенаправленных колесах, выполненную с возможностью перемещения в любом направлении и вращения вокруг своей оси. Каждое колесо мобильной робототехнической платформы оснащено отдельным электроприводом, который подключен к источнику питания через контроллер. На платформе закреплено устройство компенсации веса. На нижнем торце вертикальной опорной стойки установлена шариковая опора с возможностью свободного перемещения по горизонтальной опорной доске, на которой закреплено устройство определения положения опорной стойки. Горизонтальная опорная доска через датчик силы закреплена на устройстве компенсации веса. Датчик силы, устройство компенсации веса и устройство определения положения опорной стойки подключены к контроллеру и источнику питания. Изобретение позволяет обезвешивать элементы космического корабля и при этом устранять инерционность обезвешиваемого элемента, вызванную «эффектом присоединённых масс». 3 з.п. ф-лы, 2 ил.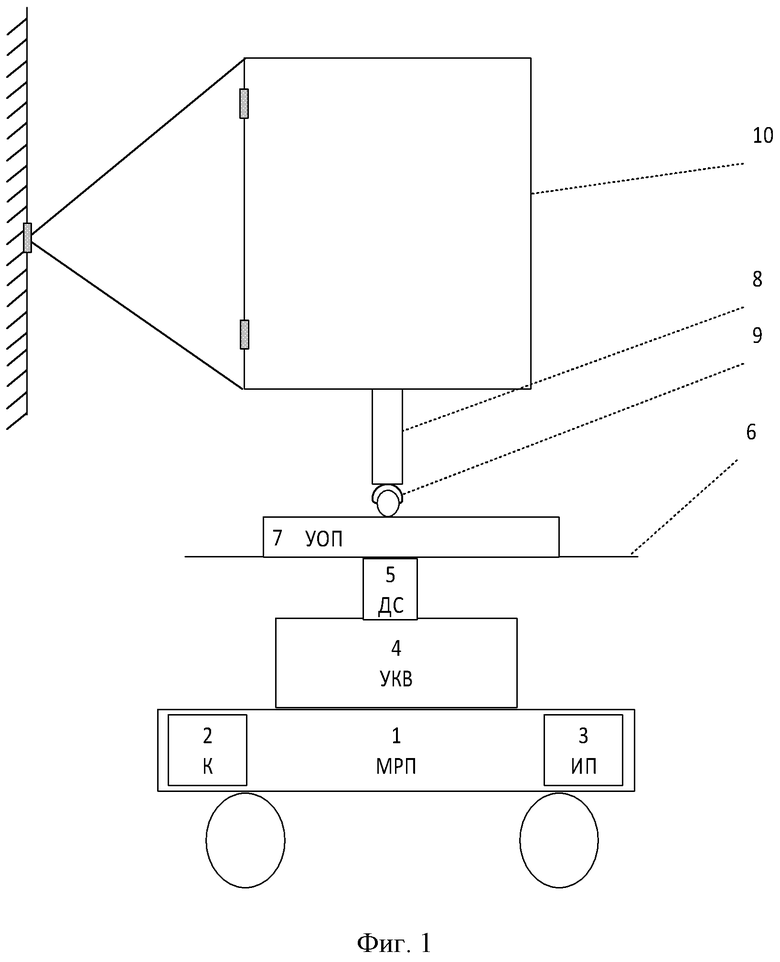
1. Устройство для обезвешивания элементов космических аппаратов при наземных испытаниях, содержащее платформу на колесах, выполненную с возможностью перемещения в любом направлении и вращения вокруг своей оси, вертикальную опорную стойку, верхняя часть которой предназначена для крепления обезвешиваемого элемента, устройство компенсации веса и датчик силы, отличающееся тем, что использована мобильная робототехническая платформа на всенаправленных колесах, каждое из которых оснащено отдельным электроприводом, который подключен к источнику питания через контроллер, на платформе закреплено устройство компенсации веса, на нижнем торце вертикальной опорной стойки установлена шариковая опора с возможностью свободного перемещения по горизонтальной опорной доске, на которой закреплено устройство определения положения опорной стойки, при этом горизонтальная опорная доска через датчик силы закреплена на устройстве компенсации веса, причем датчик силы, устройство компенсации веса и устройство определения положения опорной стойки подключены к контроллеру и источнику питания.
2. Устройство по п. 1, отличающееся тем, что в качестве всенаправленных колес использованы или Omni-колеса, или колеса Илона.
3. Устройство по п. 1, отличающееся тем, что в качестве устройства компенсации веса использован линейный электрический привод, установленный вертикально.
4. Устройство по п. 1, отличающееся тем, что устройство определения положения опорной стойки выполнено в виде прямоугольной рамки, на двух внутренних смежных вертикальных стенках которой на равном расстоянии друг от друга установлены фотоизлучатели, а на противоположных стенках – фотоприемники, причем фотоизлучатели и фотоприемники установлены напротив друг друга, фотоизлучатели подключены друг к другу параллельно и соединены с источником питания, а фотоприемники соединены с контроллером.
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ГОРИЗОНТАЛЬНО ПЕРЕМЕЩАЮЩЕЙСЯ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2376217C1 |
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ МНОГОЗВЕННЫХ МЕХАНИЗМОВ | 2008 |
|
RU2402470C2 |
| Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления | 2017 |
|
RU2677942C2 |
| СПОСОБ ОБЕЗВЕШИВАНИЯ ТРАНСФОРМИРУЕМЫХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2711774C2 |
| US 5501114 A1, 26.03.1996 | |||
| US 20060213306 A1, 28.09.2006. | |||

