Предлагаемое изобретение относится к способам испытаний многозвенных механических систем, преимущественно космических аппаратов, на функционирование и может быть использовано в ракетно-космической технике при проведении наземной отработки конструкций космических аппаратов (КА).
Из существующего уровня техники известен способ испытаний многозвенной механической системы космического аппарата на функционирование (патент RU №2252407 С1, кл. G01M 19/00), заключающийся в том, что космический аппарат устанавливают с возможностью раскрытия звеньев механической системы, соединенной с приводами раскрытия в вертикальной плоскости. Каждое звено механической системы крепят посредством пружин обезвешивания к поворотной балочной системе (элементам системы обезвешивания) и проводят регулировку усилия натяжения пружин обезвешивания (определенного заранее при взвешивании панели батареи солнечной) при раскрытом положении звеньев механической системы. Закрывают звенья, фиксируют звенья к корпусу космического аппарата и выполняют последовательное раскрытие звеньев механической системы с помощью приводов раскрытия. Регулировка усилия натяжения каждой пружины обезвешивания обеспечивают установку верхнего торца каждого звена механической системы в горизонтальную плоскость с точностью не выше 0,4°, а раскрытие звеньев механической системы производят при усилиях, создаваемых приводами раскрытия, превышающими соответствующие номинальные усилия раскрытия не менее чем на 30%.
Из существующего уровня техники известен способ испытаний многозвенной механической системы космического аппарата на функционирование и устройство для его осуществления (патент RU №2293961 С2, кл. G01M 13/02, G01M 19/00), заключающийся в том, что при проведении испытаний многозвенную механическую систему крепят каждым звеном к соответствующей секции балочной системы, поддерживающей механическую систему, с помощью регулируемых пружин с возможностью раскрытия механической системы в вертикальной плоскости. После этого с помощью настройки пружин обезвешивают звенья механической системы и затем обеспечивают жесткую связь каждого звена механической системы с соответствующей секцией секции балочной системы. Затем проводят испытания, производя совместное раскрытие звеньев многозвенной механической системы и секции балочной системы, проверяя функционирование механической системы.
Из существующего уровня техники известен способ испытаний многозвенной механической системы космического аппарата на функционирование и устройство для его осуществления (патент RU №2516880 С2, кл. B64G 7/00, B64G 5/00, G01M 17/00), заключающийся в том, что устройство для обезвешивания многозвенной механической системы КА содержит закрепленные на КА поворотные секции, расположенные в плане над соответствующими звеньями механической системы и связанные с ними посредством регулируемых пружин обезвешивания, трансформируемую опорную конструкцию из горизонтальных несущих штанг с кронштейнами, поворотные секции. Наименее удаленная от КА несущая штанга закреплена на КА, а наиболее удаленная от КА несущая штанга посредством опорной стойки опирается на пол помещения. Трансформируемая опорная конструкция снабжена фиксаторами взаимного положения несущих штанг, несущие штанги снабжены Г-образными упорами, опирающимися на пол помещения, кронштейны размещены на несущих штангах с возможностью взаимодействия и фиксации с поворотными секциями в их наиболее удаленных от космического аппарата концах. КА с закрепленным на нем устройством для обезвешивания многозвенной механической системы устанавливают на место проведения испытаний, проводят установку и фиксацию необходимой конфигурации опорной трансформируемой конструкции в горизонтальной плоскости, последовательно фиксируют положения поворотных секций системы обезвешивания в горизонтальной плоскости.
Из существующего уровня техники, наиболее близким к заявленному решению (прототипом), является способ испытаний многозвенной механической системы космического аппарата на функционирование (патент RU №2646969 С1, кл. G01M 19/00), заключающийся том, что космический аппарат, содержащий корпус с закрепленной на нем многозвенной механической системой, с приводами раскрытия, устанавливают с возможностью раскрытия звеньев механической системы в вертикальной плоскости на системе обезвешивания, отличающийся тем, что регулируют усилия натяжения каждой пружины обезвешивания в раскрытом или сложенном положении механической системы, используют значения масс и положения центров масс звеньев механической системы, полученных теоретическим или практическим путем, переводят многозвенную механическую систему в сложенное положение и фиксируют на корпусе космического аппарата или в раскрытое положение, если регулировка усилия пружин проходила в сложенном положении, и снимают значения усилий натяжения пружин обезвешивания в соответствующем положении, рассчитывают значения усилия для регулировки натяжения пружины обезвешивания каждого звена, соответствующее реальному весу элемента механической системы, затем, в случае, если механическая система в раскрытом положении, переводят ее в сложенное положение и фиксируют на корпусе космического аппарата, затем проводят перенастройку пружин обезвешивания на полученные после расчета значения, после чего проводят испытание многозвенной механической системы на раскрытие, при этом на приводах раскрытия создаются усилия, не превышающие номинальные усилия необходимые для раскрытия.
Недостатком описанных выше способов является то, что точка крепления устройства обезвешивания соответствует положению центра масс звена, определенному теоретическим путем (при условии, что конструкция механической системы неразборная и не позволяет определить фактическое положение центра масс звена). Это приводит к возникновению крутящего момента вокруг точки крепления устройства обезвешивания. Возникающий крутящий момент создает нештатные нагрузки для конструкции и силы сопротивления в узлах разворота звеньев механической системы не связанные с ее штатным функционированием, что ухудшает имитацию невесомости при испытании механической системы на функционирование.
Для заявленного способа выявлены основные общие существенные признаки, такие как: многозвенная механическая система, система обезвешивания, раскрытие звеньев механической системы в вертикальной плоскости.
Технической проблемой, на решение которой направлено заявляемое изобретение являются низкий уровень имитации невесомости при испытании многозвенной механической системы космического аппарата на функционирование.
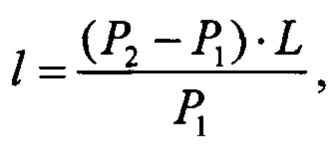
Представленная техническая проблема предлагаемого изобретения решаются, способом испытаний многозвенной механической системы космического аппарата на функционирование, заключающимся в том, что космический аппарат, содержащий корпус с закрепленной на нем многозвенной механической системой, с приводами раскрытия, устанавливают с возможностью раскрытия звеньев механической системы в вертикальной плоскости на системе обезвешивания, согласно изобретению, закрепляют устройство обезвешивания на звене в точке, соответствующей продольной координате L центра масс звена, полученной теоретическим путем, которая определяет расстояние между осью вращения звена и точкой закрепления устройства обезвешивания, контролируют значение усилия натяжения пружин устройства обезвешивания P1 и Р2 в момент начала раскрытия звена и в середине пути его движения соответственно, рассчитывают значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате положения его центра масс на полученное значение:
 где
где
Р1 - значение усилия натяжения пружин устройства обезвешивания в момент начала раскрытия звена;
Р2 - значение усилия натяжения пружин устройства обезвешивания в середине пути его движения;
 - значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате его центра масс;
- значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате его центра масс;
L - продольная координата положения центра масс звена механической системы, полученная теоретическим путем, расстояние между осью вращения звена и точкой закрепления устройства обезвешивания;
затем проводят регулировку положения точки закрепления устройства обезвешивания на звене на полученные после расчета значения, затем проводят испытание многозвенной механической системы на раскрытие.
Техническим результатом изобретения является создание условий невесомости при испытании многозвенной механической системы космического аппарата на функционирование максимально приближенных к натурным, за счет определения фактической продольной координаты центра масс звена механической системы.
Указанный технический результат предлагаемого изобретения достигается тем что, условие правильного определения положения центра масс звена имеет вид:
 где:
где:
Р1 - значение усилия натяжения пружин устройства обезвешивания в момент начала раскрытия звена;
Р2 - значение усилия натяжения пружин устройства обезвешивания в середине пути его движения;
 - значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате его центра масс;
- значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате его центра масс;
L - продольная координата положения центра масс звена механической системы, полученная теоретическим путем, расстояние между осью вращения звена и точкой закрепления устройства обезвешивания.
В случае если  ≠0, то это означает, что теоретическая координата центра масс звена не соответствует фактической координате центра масс. Это приводит к возникновению крутящего момента вокруг точки крепления устройства обезвешивания вызванного фактическим положением центра масс. Возникающий крутящий момент создает не штатные нагрузки для конструкции и силы сопротивления в узлах разворота звеньев механической системы не связанные с ее штатным функционированием, что снижает качество обезвешивания и испытаний механической систем. Для исключения возникающего крутящего момента необходимо рассчитать значение
≠0, то это означает, что теоретическая координата центра масс звена не соответствует фактической координате центра масс. Это приводит к возникновению крутящего момента вокруг точки крепления устройства обезвешивания вызванного фактическим положением центра масс. Возникающий крутящий момент создает не штатные нагрузки для конструкции и силы сопротивления в узлах разворота звеньев механической системы не связанные с ее штатным функционированием, что снижает качество обезвешивания и испытаний механической систем. Для исключения возникающего крутящего момента необходимо рассчитать значение  и провести регулировку координаты точки закрепления устройства обезвешивания к соответствующему звену.
и провести регулировку координаты точки закрепления устройства обезвешивания к соответствующему звену.
Порядок определения фактического центра масс звена механической системы космического аппарата:
- закрепляют устройство обезвешивания на звене в точке, соответствующей продольной координате L центра масс звена, полученной теоретическим путем, которая определяет расстояние между осью вращения звена и точкой закрепления устройства обезвешивания;
- контролируют значение усилия натяжения пружин устройства обезвешивания Р1 и Р2 в момент начала раскрытия звена и в середине пути его движения соответственно;
- рассчитывают значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате его центра масс на полученное значение 
- проводят регулировку положения точки закрепления устройства обезвешивания на звене на полученные после расчета значения;
- затем проводят испытание многозвенной механической системы на раскрытие.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ | 2016 |
|
RU2646969C2 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ | 2003 |
|
RU2252407C1 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2293961C2 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ГОРИЗОНТАЛЬНО ПЕРЕМЕЩАЮЩЕЙСЯ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2376217C1 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516880C2 |
| СПОСОБ ОБЕЗВЕШИВАНИЯ ТРАНСФОРМИРУЕМЫХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2711774C2 |
| СТЕНД ДЛЯ ОБЕЗВЕШИВАНИЯ ГОРИЗОНТАЛЬНО ПЕРЕМЕЩАЮЩЕЙСЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2372601C2 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ КОСМИЧЕСКИХ АППАРАТОВ ПРИ НАЗЕМНЫХ ИСПЫТАНИЯХ | 2020 |
|
RU2744925C1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ПРЕЦИЗИОННЫХ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2733012C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ РАСКРЫТИЯ БАТАРЕИ СОЛНЕЧНОЙ | 2010 |
|
RU2468969C2 |
Изобретение относится к космической технике, а более конкретно к испытаниям элементов космического аппарата (КА). Способ испытаний многозвенной системы космического аппарата на функционирование заключается в том, что КА устанавливают на системе обезвешивания. Закрепляют на звене в точке, соответствующей продольной координате L центра масс звена. Рассчитывают значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате положения его центра масс на полученное значение:
 где Р1 - значение усилия натяжения пружин устройства обезвешивания в момент начала раскрытия звена; Р2 - значение усилия натяжения пружин устройства обезвешивания в середине пути его движения;
где Р1 - значение усилия натяжения пружин устройства обезвешивания в момент начала раскрытия звена; Р2 - значение усилия натяжения пружин устройства обезвешивания в середине пути его движения;  - значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате его центра масс; L - расстояние между осью вращения звена и точкой закрепления устройства обезвешивания. Проводят регулировку положения точки закрепления устройства обезвешивания на звене на полученные после расчета значения, затем проводят испытание многозвенной механической системы на раскрытие. Достигается повышение уровня имитации невесомости.
- значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате его центра масс; L - расстояние между осью вращения звена и точкой закрепления устройства обезвешивания. Проводят регулировку положения точки закрепления устройства обезвешивания на звене на полученные после расчета значения, затем проводят испытание многозвенной механической системы на раскрытие. Достигается повышение уровня имитации невесомости.
Способ испытаний многозвенной механической системы космического аппарата на функционирование, заключающийся в том, что космический аппарат, содержащий корпус с закрепленной на нем многозвенной механической системой с приводами раскрытия устанавливают с возможностью раскрытия звеньев механической системы в вертикальной плоскости на системе обезвешивания, отличающийся тем, что закрепляют устройство обезвешивания на звене в точке, соответствующей продольной координате L центра масс звена, полученной теоретическим путем, которая определяет расстояние между осью вращения звена и точкой закрепления устройства обезвешивания, контролируют значение усилия натяжения пружин устройства обезвешивания Р1 и Р2 в момент начала раскрытия звена и в середине пути его движения соответственно, рассчитывают значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате положения его центра масс на полученное значение:
 где
где
Р1 - значение усилия натяжения пружин устройства обезвешивания в момент начала раскрытия звена;
Р2 - значение усилия натяжения пружин устройства обезвешивания в середине пути его движения;
 - значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате его центра масс;
- значение регулировки положения точки закрепления устройства обезвешивания на звене по продольной координате его центра масс;
L - продольная координата положения центра масс звена механической системы, полученная теоретическим путем, расстояние между осью вращения звена и точкой закрепления устройства обезвешивания;
затем проводят регулировку положения точки закрепления устройства обезвешивания на звене на полученные после расчета значения, затем проводят испытание многозвенной механической системы на раскрытие.
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2516880C2 |
| СПОСОБ ИСПЫТАНИЙ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА НА ФУНКЦИОНИРОВАНИЕ | 2016 |
|
RU2646969C2 |
| US 9228917 B1, 05.01.2016. | |||

