Изобретение относится к гидрографии, в частности к способам и техническим средствам барометрической съемки рельефа дна путем определения глубин на заданной акватории. Известно, что положительные формы подводного рельефа ограничивают свободу маневрирования судна. Такие участки рельефа дна являются навигационными опасностями, которые показываются на навигационных морских картах в диапазоне всех глубин (Система морских карт, руководств и пособий (часть 1). - СПб: ГУНиО МО, 1997. - 35 с. РД 31.63.01-83 [1]). Для их выявления используется понятие навигационной глубины, которая определяется как наименьшая безопасная для плавания судна глубина Zo, рассчитываемая с учетом его габаритов, параметров движения и условий плавания (Руководство по определению оперативной проходной осадки судов на подходных каналах к морским портам, Министерство морского флота СССР. - М.: В/О «Мортехинформреклама», 1983. - 34 с. [2]). Все глубины, значения которых меньше навигационной глубины, будут для судна опасными, а изобата, проходящая через ближайшие глубины, меньше навигационной, образует границу навигационной опасности. Для определения положения последней интерполируют глубины, показанные на карте. Известные различные методы интерполяции измеренных и нанесенных на навигационные карты глубин не позволяют учитывать геоморфологические особенности фактического рельефа (Смирнова Е.Б., Канаев В.Ф., Богданов К.А., Мишин С.Н. Основы изображения подводного рельефа на морских картах. - Л., ЦКФ ВМФ, 1973, с. 82-91 [3]), что может приводить к существенным ошибкам.
Задачей предлагаемого технического решения является повышение навигационной безопасности судов путем создания способа, позволяющего определять границы опасных участков дна на картах, не используя интерполяцию глубин.
Поставленная задача решается за счет того, что в способе определения на навигационных картах границ опасных участков морского дна, включающем построение и нанесение изобат по результатам промеров на навигационные карты, дополнительно выполняют сегментирование картографического отображения рельефа дна на монотонные участки с известными наибольшими и наименьшими глубинами, выполняют измерения кратчайших расстояний от оси судового хода до опасных изобат с обоих бортов судна, выполняют оценку безопасности прохода судна вблизи пространственных опасностей путем построения регрессионных моделей опасных изобат, что позволяет определять границы навигационных опасностей, образованных подводным рельефом, без интерполяции показанных на карте глубин.
В работе (Жуков Ю.Н. Математические инструменты описания картографического отображения рельефа Земли // Навигация и гидрография. - 2011. - №32. - С. 60-69 [4]) показано, что всякую гладкую поверхность можно однозначно представить набором ячеек Морса-Смейла (CMS), которые сегментируют картографическое отображение поверхности дна на участки с «однородным» полем градиента глубины. В статье (Абрамов А.М. Проблемы сравнения разных картографических отображений одного и того же подводного рельефа // Навигация и гидрография. - 2013. - №36. - С. 54-60 [5]) рассмотрено соответствие геоморфологических элементов, формирующих каркас рельефа и элементов, образующих границы ячеек CMS.
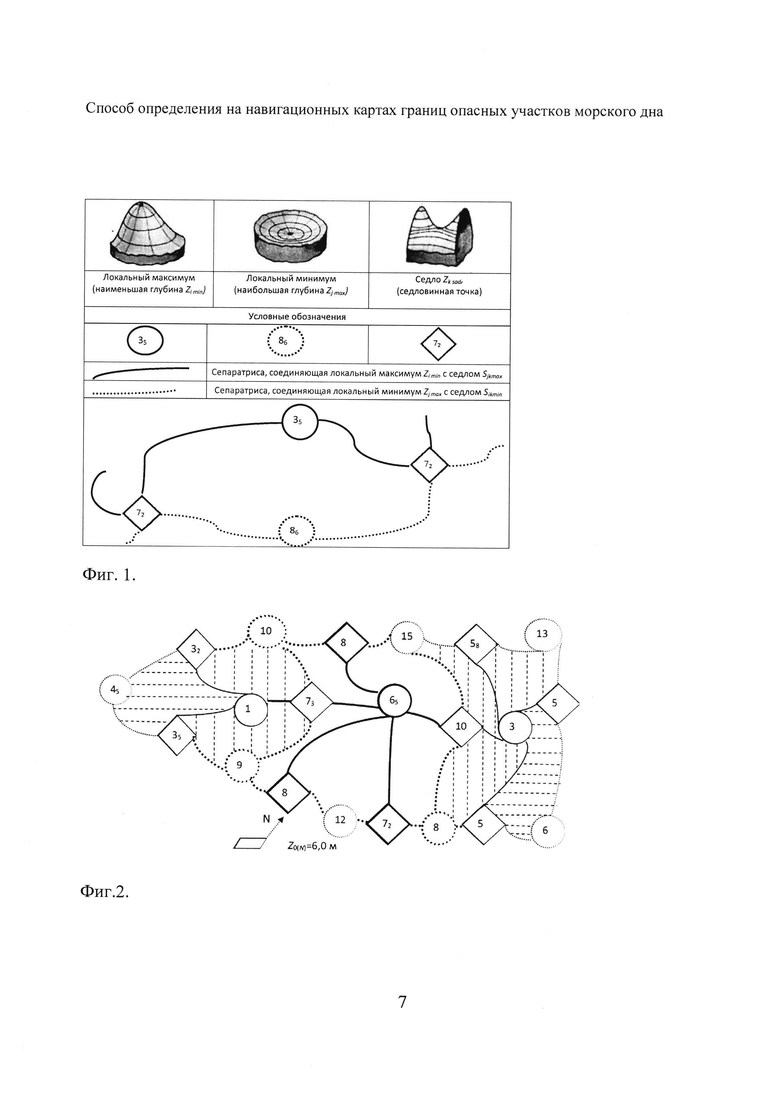
Применительно к отображению подводного рельефа границы ячеек CMS образуют: критические точки, а именно: точки локальных максимумов (наименьшие глубины), точки минимумов (наибольшие глубины) и точки седел (седловинные точки); сепаратрисы - линии, соединяющие критические точки в определенном порядке.
Признаком существования критической точки является равенство в ней градиента глубины нулю. Сепаратрисы, соединяющие точки наименьших и наибольших глубин с точками седел, представляют собой монотонные линии, в каждой точке которых направление линии совпадает с направлением градиента глубины [4].
В точках наименьших Zmin и наибольших Zman глубин может пересекаться неограниченное количество сепаратрис, а в точках седел Zsad под углами, близкими к прямым, пересекаются только четыре сепаратрисы. Вышеприведенные правила образования границ ячейки CMS на подводном рельефе показаны на чертеже (фиг. 1).
Фиг. 1. Правила образования границ ячейки CMS на подводном рельефе.
Условные обозначения:
 Участки рельефа дна, на которых все глубины менее Z0(N)=6,0 м
Участки рельефа дна, на которых все глубины менее Z0(N)=6,0 м
 Участки рельефа дна, на которых могут быть глубины как менее, так и более Z0(N)=6,0 м
Участки рельефа дна, на которых могут быть глубины как менее, так и более Z0(N)=6,0 м
 Участки рельефа дна, на которых все глубины более Z0(N)=6,0 м
Участки рельефа дна, на которых все глубины более Z0(N)=6,0 м
 Судно N, с известной навигационной глубиной Z0(N)=6,0 м
Судно N, с известной навигационной глубиной Z0(N)=6,0 м
Фиг. 2. Результаты сравнения навигационной глубины корабля N
и глубин в ячейках CMS. Условные обозначения:
 Участки рельефа дна, на которых все глубины менее Z0(N)=6,0 м
Участки рельефа дна, на которых все глубины менее Z0(N)=6,0 м
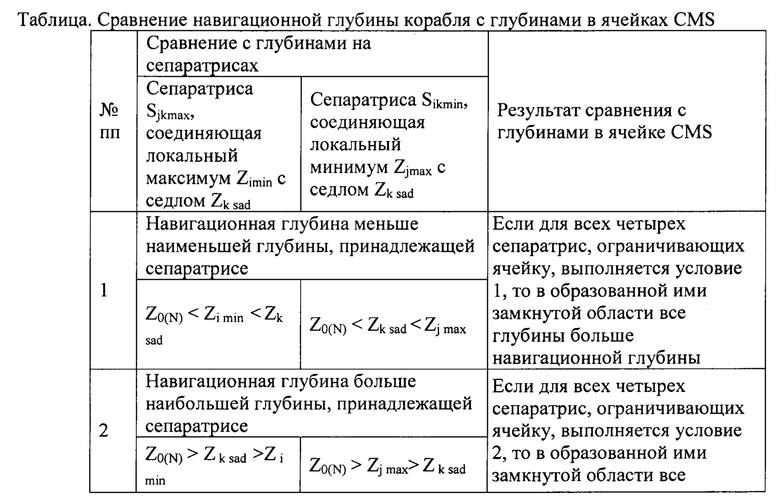
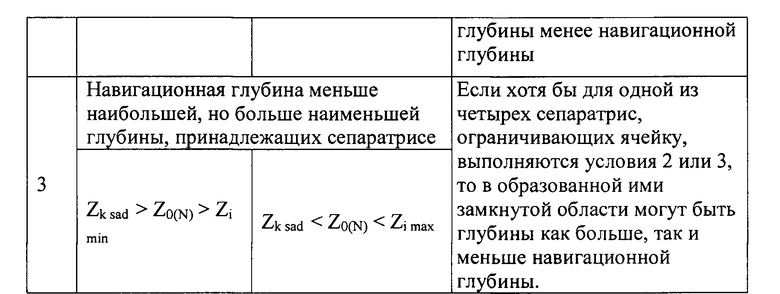
Каждая ячейка CMS представляет собой монотонную гладкую поверхность, в границах которой отсутствуют другие локальные максимумы и минимумы, кроме тех, где пересекаются сепаратрисы. Это позволяет сравнивать все принадлежащие ячейкам CMS глубины с известной навигационной глубиной корабля. В приведенной ниже таблице перечислены все возможные условия сравнения навигационной глубины корабля и глубин, принадлежащих ячейкам CMS.
На фиг. 2 показано отображение рельефа дна ячейками CMS. Используя таблицу, сравним глубины в ячейках CMS с известной навигационной глубиной Z0(N)=6,0 м некоторого судна N. Как видно из фиг. 2, в двух горизонтально заштрихованных ячейках все глубины будут меньше навигационной глубины судна N, в пяти ячейках с вертикальной штриховкой могут быть глубины как менее, так и более вышеуказанной навигационной глубины. Участки рельефа в этих ячейках будут опасны для плавания судна N. Наконец, оставшиеся пять не заштрихованных ячеек образуют замкнутый, ограниченный участок дна с наименьшей глубиной 6,5 м соответственно, все остальные глубины в этих ячейках тем более будут больше навигационной глубины судна N. Образованные сепаратрисами внешние границы этого участка отделяют его от опасных участков морского дна.
Таким образом, сегментирование картографического отображения рельефа дна на монотонные участки с известными наибольшими и наименьшими глубинами позволяет определять границы навигационных опасностей, образованных подводным рельефом, без интерполяции показанных на карте глубин.
До недавнего времени отбор глубин для определения границ ячеек CMS был затруднен вследствие недостаточной подробности материалов съемок рельефа дна и отсутствия необходимых алгоритмов. С появлением гидрографических средств площадного обследования дна и разработки автоматизированного метода нахождения линий сепаратрис на заданном наборе глубин (Жуков Ю.Н. Автоматизированный метод нахождения линий водоразделов и тальвегов // Навигация и гидрография. - 2013. - №35. - С. 58-63 [6]) эта задача значительно упрощается.
Предлагаемый способ реализуется следующим образом.
При плавании судна по заданному маршруту при пересечении изобат с малыми глубинами, выполняют непрерывное измерение глубин посредством штатного судового эхолота. Посредством плоттера наносят на морскую навигационную карту измеренные глубины. Посредством судовой ЭВМ выполняют сегментирование картографического отображения рельефа дна на монотонные участки с известными наибольшими и наименьшими глубинами с использованием ячеек CMS. Сравнивают все принадлежащие ячейкам CMS глубины с измеренной, посредством судового эхолота, фактической навигационной глубиной.
Практика судовождения показывает, что практически невозможно управлять судном так, чтобы оно следовало по оси судового хода, т.е. невозможно обеспечить идеальную траекторию движения судна. Траектория движения судна будет подвержена произвольным отклонениям за счет действия случайных возмущающих и управляющих воздействий. При следовании судна по судовым ходам судоводитель оценивает положение судна в маршрутной системе координат, т.е его интересует уклонение по перпендикуляру к оси судового хода и дистанция до точки поворота. Совокупность отклонений движения судна по перпендикуляру к оси судового хода и будет определять безопасность плавания по отношению к пространственным опасностям.
Оценка безопасности прохода судна вблизи пространственных опасностей выполняется путем построения регрессионных моделей опасных изобат, что позволяет получить количественные оценки возможного сближения судна с навигационными опасностями в зависимости от прохождения траектории движения судна в той или иной пространственной области.
Получение численных значений наименьших расстояний до опасных изобат выполняют путем их моделирования методами математической статистики. Измерения кратчайших расстояний от оси судового хода до опасных изобат с обеих сторон судового хода выполняют посредством статистического пакета Statistica. Полученная таким образом модель опасной изобаты описывает крайние точки реальной изобаты, физический смысл которой в том, что при нахождении судна на линии, вероятность касания грунта стремится к 1; при нахождении судна в зоне между моделью и реальной изобатой касание грунта неизбежно; за линией модели в сторону увеличения глубины вероятность безопасного плавания повышается.
На навигационный монитор выводят электронную навигационную карту с границами опасных участков морского дна для данного судового хода.
Источники информации
1. Система морских карт, руководств и пособий (часть 1). - СПб: ГУНиО МО, 1997. - 35 с. РД 31.63.01-83.
2. Руководство по определению оперативной проходной осадки судов на подходных каналах к морским портам, Министерство морского флота СССР. - М.: В/О «Мортехинформреклама», 1983. - 34 с.
3. Смирнова Е.Б., Канаев В.Ф., Богданов К.А., Мишин С.Н. Основы изображения подводного рельефа на морских картах. - Л., ЦКФ ВМФ, 1973, с 82-91, 100-128.
4. Жуков Ю.Н. Математические инструменты описания картографического отображения рельефа Земли // Навигация и гидрография. - 2011. - №32. - С. 60-69.
5. Абрамов А.М. Проблемы сравнения разных картографических отображений одного и того же подводного рельефа // Навигация и гидрография. - 2013. - №36. - С. 54-60.
6. Жуков Ю.Н. Автоматизированный метод нахождения линий водоразделов и тальвегов // Навигация и гидрография. - 2013. - №35. - С. 58-63 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2016 |
|
RU2647190C1 |
| Автоматизированная система сбора и распространения цифровой картографической информации водных путей | 2024 |
|
RU2833209C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| Способ и система для определения местоположения высокоскоростного поезда в навигационной слепой зоне на основе метеорологических параметров | 2022 |
|
RU2804147C1 |
| Способ генерации предварительной прокладки пути судна и устройство для его реализации | 2021 |
|
RU2782617C1 |
| СПОСОБ СТЕРЕОСЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2487368C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
Изобретение относится к области гидрографии, в частности к способам и техническим средствам барометрической съемки рельефа дна путем определения глубин на заданной акватории. Способ определения на навигационных картах границ опасных участков морского дна включает построение и нанесение изобат по результатам промеров на навигационные карты. При этом дополнительно выполняют сегментирование картографического отображения рельефа дна на монотонные участки с известными наибольшими и наименьшими глубинами и выполняют измерения кратчайших расстояний от оси судового хода до опасных изобат с обоих бортов судна. Затем выполняют оценку безопасности прохода судна вблизи пространственных опасностей путем построения регрессионных моделей опасных изобат. Техническим результатом заявленного изобретения является повышение навигационной безопасности судов путем определения границ опасных участков дна на картах без использования интерполяции глубин. 2 ил.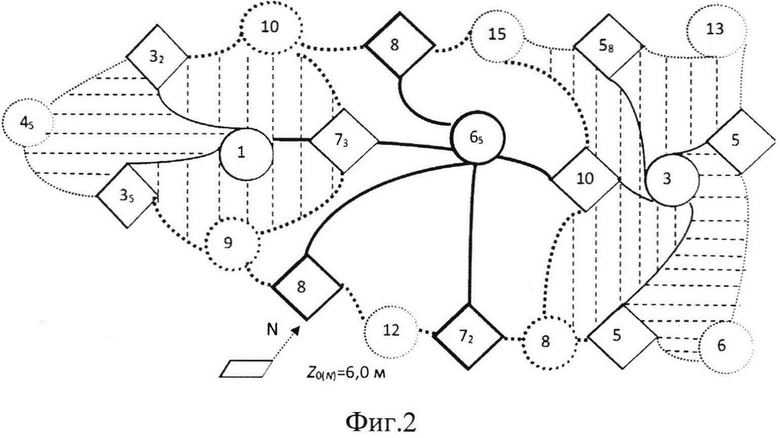
Способ определения на навигационных картах границ опасных участков морского дна, включающий построение и нанесение изобат по результатам промеров на навигационные карты, отличающийся тем, что дополнительно выполняют сегментирование картографического отображения рельефа дна на монотонные участки с известными наибольшими и наименьшими глубинами, выполняют измерения кратчайших расстояний от оси судового хода до опасных изобат с обоих бортов судна, выполняют оценку безопасности прохода судна вблизи пространственных опасностей путем построения регрессионных моделей опасных изобат.
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2005 |
|
RU2281529C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| US 7760587 B2 20.07.2010. | |||

