Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения координат местоположения источников импульсного радиоизлучения (ИРИ), сведения о которых отсутствуют в базе данных (например, государственной радиочастотной службы или государственной службы надзора за связью). Изобретение может быть использовано при поиске местоположения несанкционированных средств связи.
Известны способы определения координат ИРИ, в которых используются пассивные пеленгаторы в количестве не менее трех, центр тяжести области пересечения выявленных азимутов которых на фронт прихода волны принимается за оценку местоположения. Основными принципами работы таких пеленгаторов являются амплитудные, фазовые и интерферометрические [1, 2]. Широко применяемым является амплитудный способ пеленгования, при котором используется антенная система, имеющая диаграмму направленности с ярко выраженным максимумом главного лепестка и минимальными задним и боковыми лепестками. К таким антенным системам относятся, например, логопериодические или антенны, имеющие кардиоидную характеристику и др. При амплитудном способе механическим вращением добиваются положения антенны, при котором выходной сигнал имеет максимальную величину. Такое направление принимают за направление на ИРИ. К недостаткам большинства пеленгаторов следует отнести высокую степень сложности антенных систем, коммутационных устройств и наличие многоканальных радиоприемников, а также необходимость в быстродействующих системах обработки информации.
Наличие в федеральных округах государственной радиочастотной службы взаимосвязанных через центральный пункт разветвленной сети радиоконтрольных постов, оборудованных средствами приема радиосигналов, измерения и обработки их параметров, позволяет дополнить их функции и задачами определения координат местоположения тех ИРИ, сведения о которых отсутствуют в базе данных, не прибегая к использованию сложных и дорогостоящих пеленгаторов.
Известен способ [3], в котором для определения координат местоположения ИРИ используют N, не менее четырех стационарных радиоконтрольных постов, расположенных не на одной прямой, один из которых принимают за базовый, соединяя с остальными N-1 постами линиями связи, на всех постах осуществляют квазисинхронное сканирование по заданным фиксированным частотам настройки, усредняют измеренные значения уровней сигналов на каждой из сканируемых частот, а затем на базовом посту для каждого из сочетаний  (сочетаний из N по 4) на основании обратно пропорциональной зависимости отношений расстояний от поста до источника радиоизлучения и соответствующих им разностей уровней сигналов, выраженных в дБ, составляют три уравнения, каждое из которых описывает окружность равных отношений, по параметрам двух любых пар которых и определяют текущее среднее значение широты и долготы местоположения источника радиоизлучения. Недостатком этого способа является большое количество стационарных постов радиоконтроля.
(сочетаний из N по 4) на основании обратно пропорциональной зависимости отношений расстояний от поста до источника радиоизлучения и соответствующих им разностей уровней сигналов, выраженных в дБ, составляют три уравнения, каждое из которых описывает окружность равных отношений, по параметрам двух любых пар которых и определяют текущее среднее значение широты и долготы местоположения источника радиоизлучения. Недостатком этого способа является большое количество стационарных постов радиоконтроля.
Известны способы и устройства пеленгования [4, 5], которые могут быть использованы для целей определения координат.
Способ [4] основан на приеме сигналов тремя антеннами, образующими две пары измерительных баз, измерении разностей времени прихода сигналов ИРИ и детерминированных вычислений искомых координат.
К недостаткам способа следует отнести:
1) Большое количество антенн.
2) Способ не ориентирован на использование радиоконтрольных постов.
3) Измерительные базы для вычисления разности времен прихода сигналов ИРИ парами антенн существенно ограничивают разнос этих антенн, не говоря о нецелесообразности и большой технической сложности реализации способа.
Разнесенный разностно-дальномерный пеленгатор [5], состоящий из двух периферийных пунктов (ПП), центрального пункта (ЦП) и системы единого времени, преследует цель разгрузить канал связи между пунктами. Периферийные пункты предназначены для приема, хранения, обработки сигналов и передачи фрагментов сигналов на ЦП, на котором вычисляется разность времени прихода сигналов. В системе единого времени применяется хронизатор, представляющий собой привязанный к шкале единого времени хранитель шкалы текущего времени (часы), предназначенный для привязки записываемых в ЗУ значений уровня сигнала к значению времени приема.
Данному пеленгатору свойственны следующие недостатки:
1) Не адаптирован к радиоконтрольным пунктам, используемым в филиалах федеральных округов государственной радиочастотной службы или государственной службы надзора за связью.
2) Большое количество специализированных пеленгационных (но не радиоконтрольных) постов.
3) Необоснованное и не раскрытое (хотя бы до функциональной схемы) применение системы единого времени на ЦП и хронизаторов на ПП, синхронизированных с системой единого времени.
4) Необходимость в наличии радиоканалов с большой пропускной способностью (до 625 Мбод) для передачи даже фрагментов сигналов с ПП1 и ПП2 на ЦП.
5) Для организации радиоканала необходимы радиопередающие устройства и получение разрешения на их работу в определенных условиях эксплуатации.
Известен разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство [6].
Способ, основанный на приеме сигналов ИРИ четырьмя антеннами, образующими три независимые измерительные базы, в разнесенных точках A, B, C, D таким образом, что объем фигуры, образованный из этих точек, больше нуля (VA,B,C,D>0). Сигнал одновременно принимается на все антенны, измеряют три независимые разности времени ΔtAC, ΔtBC, ΔtDC приема сигнала парами антенн, образующих измерительные антенные базы (АС), (ВС) и (DC). По измеренным разностям времен вычисляют разности дальностей от ИРИ до пар точек (А, С), (В, С), (D, C), для k-й тройки антенн, расположенных в точках А, В, С при k=1, B, C, D при k=2, D, C, A при k=3, вычисляют с помощью измеренных разностей дальностей значения угла γk, характеризующие угловое положение плоскости положения ИРИ Ωk, k=1, 2, 3 относительно соответствующей измерительной базы, и координаты точки Fk, принадлежащей k-й плоскости положения ИРИ, вычисляют искомые координаты ИРИ как координаты точки пересечения трех плоскостей положения ИРИ Ωk, k=1, 2, 3, каждая из которых характеризуется координатами точек расположения k-й тройки антенн и вычисленными значениями угла γk и координатами точки Fk, отображают результаты вычисления координат ИРИ в заданном формате.
Этот способ ближе к заявляемому, но также обладает рядом существенных недостатков:
1) Сложность практической реализации способа в связи с отсутствием возможности измерении разностей времен приема сигнала ИРИ только антеннами (измерительные радиоприемники в блок-схеме отсутствуют).
2) Необходимость сведения сигналов ИРИ с разнесенных на оптимальное расстояние до 0,6-0,7 расстояний электромагнитной доступности (ЭМД) антенн согласно [2] в одну точку, что реализовывать экономически нецелесообразно.
3) Для измерения разности времени приема сигнала непосредственно с антенн используются двухвходовые измерители.
4) Сложность технической реализации, обусловленная большим количеством различных вычислителей.
5) Неопределенность в построении поверхности положения в виде плоскости, перпендикулярной плоскости расположения антенн, так как антенны в точках A, B, C, D не располагаются в одной плоскости, о чем свидетельствует условие VA,B,C,D>0 в формуле изобретении.
Наиболее близким к заявляемому является дальномерно-разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство [7], принятый в качестве прототипа.
Способ основан на приеме сигнала тремя антеннами, измерении значений двух разностей времен приема сигнала ИРИ антеннами, измерении двух значений плотности потока мощности сигнала ИРИ, последующей обработке результатов измерений с целью вычисления координат точки, через которую проходит линия положения ИРИ.
Этот способ предполагает выполнение следующих операций:
- располагают три антенны в вершинах треугольника ABC;
- принимают сигнал на все три антенны;
- измеряют две разности времен ΔtAC и ΔtBC приема сигнала ИРИ антеннами;
- измеряют плотности потока мощности P1 и Р2 сигнала в точках размещения антенн 1 и 2;
- вычисляют значения разностей дальностей от ИРИ до пар антенн с использованием выражений ΔrAC=CΔtAC, ΔrBC=CΔtBC, ΔrAB=ΔrAC-ΔrBC, где С - скорость распространения электромагнитной волны;
- вычисляют координаты по полученной формуле.
В соответствии с [7] в состав устройства, реализующего способ, входят:
- три антенны;
- два измерителя разности времен;
- два измерителя плотности потока мощности;
- вычислительный блок;
- блок индикации.
Прототипу свойственны следующие недостатки:
1) Практическая сложность осуществления способа в связи с отсутствием возможности измерении разностей времен приема сигнала ИРИ только антеннами (измерительные радиоприемники в блок-схеме отсутствуют).
2) Необходимость сведения сигналов ИРИ с разнесенных на несколько километров антенн в одну точку для измерения двухвходовыми измерителями, что является существенной и не решенной авторами патента проблемой.
3) Отсутствует возможность использования результатов измерения в различных сочетаниях для их статистической обработки с целью повышения точности определения координат местоположения ИРИ.
4) Не адаптирован к оборудованию радиоконтрольных постов (избыточны два измерителя разности времен, два измерителя плотности потока мощности, вычислительный блок, блок индикации), имеющихся в филиалах федеральных округов радиочастотной службы РФ, а поэтому не может быть там использован.
5) В качестве поверхностей положения ИРИ используются двухполостные гиперболоиды вращения, соответствующие двум разностно-временным измерениям, и сфера, параметры которой определяются при обработке значений плотности потока мощности в точках размещения двух приемных антенн. Эти сложные нелинейные выражения приводят к появлению ошибок определения координат. В частности, вычисление координат {xF, yF} точки F, принадлежащей линии пеленга ИРИ, с использованием выражений:
 ,
,
 ,
,
приводит к появлению ошибки сингулярности (когда знаменатель может быть близок к нулю).
Целью настоящего изобретения является разработка способа определения координат местоположения ИРИ, лишенного недостатков прототипа, тремя радиоконтрольными постами, что позволит применить такой способ во всех филиалах федеральных округов Радиочастотной службы Российской Федерации.
Эта цель достигается с помощью признаков, указанных в формуле изобретения, общих с прототипом.
Мультипликативный разностно-относительный способ определения координат местоположения источника импульсного радиоизлучения, основанный на измерении величин запаздывания сигналов радиоизлучений на назначенных частотах в нескольких точках пространства радиоприемными устройствами, отличающийся тем, что для измерения моментов прихода сигналов используют предварительно откалиброванные n=4 поста радиоконтроля, один из которых используют в качестве базового, посты соединяют линиями связи с базовым, а измеренные значения моментов прихода сигналов с них передают на базовый пост, где вычисляют разность времени прихода сигналов, формируют определитель Кэли-Менгера размерностью 6x6, из которого вычисляют одно неизвестное расстояние от искомого источника до одного из постов а затем через него и расстояния до других постов, составляют попарные отношения расстояний, равнозначные отношениям величин времени распространения сигналов до постов, формируют  мультипликативных функций, представляющих сочетания, взятые по i, из полученных
мультипликативных функций, представляющих сочетания, взятые по i, из полученных  парных сочетаний разностей отношений расстояний, рассчитанных от точек измерения до местоположения искомого ИРИ по задаваемым из известного диапазона значениям широт, долгот и высот местоположениям искомого ИРИ и соответствующих вычисленным попарным отношениям расстояний, равнозначных отношениям измеренных величин времени распространения сигналов до постов, изменяют дихотомически или методом наискорейшего спуска последовательно каждый из параметров местоположения искомого источника радиоизлучения при неизменных значениях двух других и находят точки экстремумов и точки перегиба мультипликативных функций с усреднением и последовательной фиксацией каждого искомого параметра местоположения источника в этих точках как окончательного.
парных сочетаний разностей отношений расстояний, рассчитанных от точек измерения до местоположения искомого ИРИ по задаваемым из известного диапазона значениям широт, долгот и высот местоположениям искомого ИРИ и соответствующих вычисленным попарным отношениям расстояний, равнозначных отношениям измеренных величин времени распространения сигналов до постов, изменяют дихотомически или методом наискорейшего спуска последовательно каждый из параметров местоположения искомого источника радиоизлучения при неизменных значениях двух других и находят точки экстремумов и точки перегиба мультипликативных функций с усреднением и последовательной фиксацией каждого искомого параметра местоположения источника в этих точках как окончательного.
Перед проведением измерений и вычислений координат местоположения искомого ИРИ выполняют калибровку измерителей на постах.
Калибровку измерителя момента времени прихода сигналов на посты выполняют, используя эталонные РЭС с известными параметрами сигналов и координатами местоположения. Каждая эталонная РЭС должна находиться в зоне ЭМД всех n постов. Количество эталонных РЭС и распределение в зоне ЭМД постов должно быть достаточным для обеспечения заданной точности калибровки как по расстоянию, так и азимуту относительно постов. Перед вычислением параметров местоположения ИРИ (широты, долготы и высоты) определяют расстояния от постов до ИРИ (см. поясняющую фиг 1). Для этого по отметкам моментов времени прихода сигналов ИРИ Та, Tb, Тс, Td на синхронизированные сигналами эталонных РЭС [8] посты вычисляются на ведущем посту длительности времени запаздывания прихода сигналов искомого РЭС на j и k посты:  .
.
Выражая длительность времени запаздывания прихода сигналов через соответствующие разности расстояний, проходимые сигналами, получим  , или в другом виде:
, или в другом виде:  , где С - скорость распространения электромагнитной волны.
, где С - скорость распространения электромагнитной волны.
Из полученных соотношений выразим расстояния rb, rc и rd через ra:  ,
,  , и
, и  ,
,
Для вычисления неизвестного расстояния ra составляют и вычисляют определитель Кэли-Менгера размерностью 6×6, на единицу большей, чем количество вершин описываемого им объема пятивершинной симплекс-фигуры, представленной на фиг. 1. В [9, с. 146] утверждается, что для любых пяти точек эвклидова пространства десять квадратов расстояний в определителе Кэли-Менгера обращают последний в ноль. Определитель записывается в виде
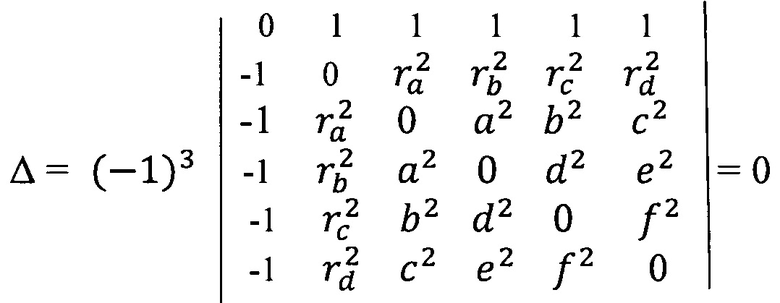
Определитель решается относительно ra численным методом.
После определения ra находят и остальные расстояния rb, rc и rd по приведенным выше соотношениям.
Затем определяются координаты местоположения ИРИ.
В основе определения координат лежит концептуальный отказ от применения каких-либо сложных линий положения ИРИ, например парабол, гипербол, окружностей Аполлония Пергского, овалов Кассини, гиперболоидов вращения и других линий, и применение универсального численного способа последовательного определения параметров местоположения ИРИ. При этом вместо физических величин (расстояний, величин запаздываний прихода сигналов радиоизлучений в точки их приема) предлагается использовать мультипликативные разности отношений этих физических величин. При этом использовать критерий минимума разностей отношений расстояний от местоположения ИРИ до постов радиоконтроля и соответствующих им отношений величин времени распространения сигналов. Координаты могут вычисляться по методу дихотомии, например методу поразрядного уравновешивания. Для его использования априори должны быть известны диапазоны D значений искомых величин. Эти диапазоны обычно известны, исходя из параметров общей зоны ЭМД используемых четырех постов радиоконтроля. В соответствии с алгоритмом поразрядного уравновешивания первоначально задают среднее из диапазона D значение определяемой величины (например, широты) при фиксированной, но лежащей в известных диапазонах значений долготе и высоте. Вычисляют расстояния от i-го местоположения ИРИ до каждого j-го поста  ,
,  .
.
Затем определяют парные отношения вычисленных до постов  и
и  расстояний:
расстояний:  . Эти отношения позволяют исключить зависимость вычисления координат местоположения от мощности ИРИ. Полученные отношения сравнивают путем вычитания с соответствующими им отношениями расстояний от ИРИ до постов j и k,
. Эти отношения позволяют исключить зависимость вычисления координат местоположения от мощности ИРИ. Полученные отношения сравнивают путем вычитания с соответствующими им отношениями расстояний от ИРИ до постов j и k,  , например
, например  ,
,  ,
,  ,
,  итд, … … … … .. (2), где ra, rb, rc, rd - фактические расстояния до постов, вычисленные ранее с помощью определителя Кэли-Менгера.
итд, … … … … .. (2), где ra, rb, rc, rd - фактические расстояния до постов, вычисленные ранее с помощью определителя Кэли-Менгера.
Например, для постов А и В эту разность определяют как f1abi,ab=(nabi-nab). Для В и С - как f1bci,bc=(nbci-nbc) и.т.д.
Если разность отношений меньше нуля, то к первоначальному значению широты добавляют 1/4 часть диапазона. В противном случае из первоначального значения широты вычитают 1/4 часть диапазона ее значения. Затем опять производят вычисление расстояний до постов и оценку результатов сравнения, как описано выше. При этом добавляют (или вычитают) уже 1/8 часть диапазона, затем 1/16 часть и т.д. Такие итерации продолжают до тех пор, пока результат сравнения не окажется по модулю меньше заранее заданного значения погрешности дискретизации каждого параметра местоположения  , где m - количество итераций.
, где m - количество итераций.
После этого фиксируют полученное значение параметра. Затем аналогично вычисляют значение долготы при найденной широте и фиксированной высоте, а затем и высоты при найденных широте и долгое. Минимум любой из разностей свидетельствует о нахождении местоположения ИРИ в точке с выбранными координатами. Но так как координаты ИРИ находятся на перпендикуляре к линии баз, то каждая из отдельных разностей будет иметь минимальное значение при нахождении ИРИ по обе стороны от баз. Возникает неоднозначность в определении местоположения ИРИ. Неоднозначность снимают путем нахождения экстремумов или точек перегиба мультипликативных функций разностей отношений. При этом берут разности отношений вычисляемых по (2) расстояний от источника радиоизлучений до точек их приема и отношений расстояний, соответствующих длительностям распространения сигналов, вычисленным по (1). Так как измерители величин моментов прихода) сигналов расположены на всех постах, то для всех их сочетаний будет шесть таких разностей: f1abi.ab=(nabi-nab), f1aci,ac=(naci-nac), f1adi,ad=(nadi-nad), f1bci,bc=(nbci-nbc), f1bdi,bd=(nbdi-nbd), f1cdi,cd=(ncdi-ncd).
На основе этих шести типов разностей отношений для однозначного определения координат местоположения ИРИ составляют мультипликативные функции, включающие все сочетания  этих разностей отношений, где k изменяется от 2 до
этих разностей отношений, где k изменяется от 2 до  .
.
Примеры мультипликативных функций, включающих две разности отношений: f2ab.ас=f1abi,abf1aci,ac, f2ab,bc=f1abi,abf1bci,bc и. т.д. Общее число таких функций равно  .
.
Пример мультипликативных функций, включающих три разности отношений: f3ab,ac,bc=f1abi,abf1aci,acf1bci,bc, f3ab,ac,cd=f1abi,abf1aci,acf1cdi,cd, f3ab,bc,cd=f1abi,abf1bci,bcf1cdi,cd. Общее число таких функций равно  .
.
Общее число всех типов мультипликативных функций составляет
 .
.
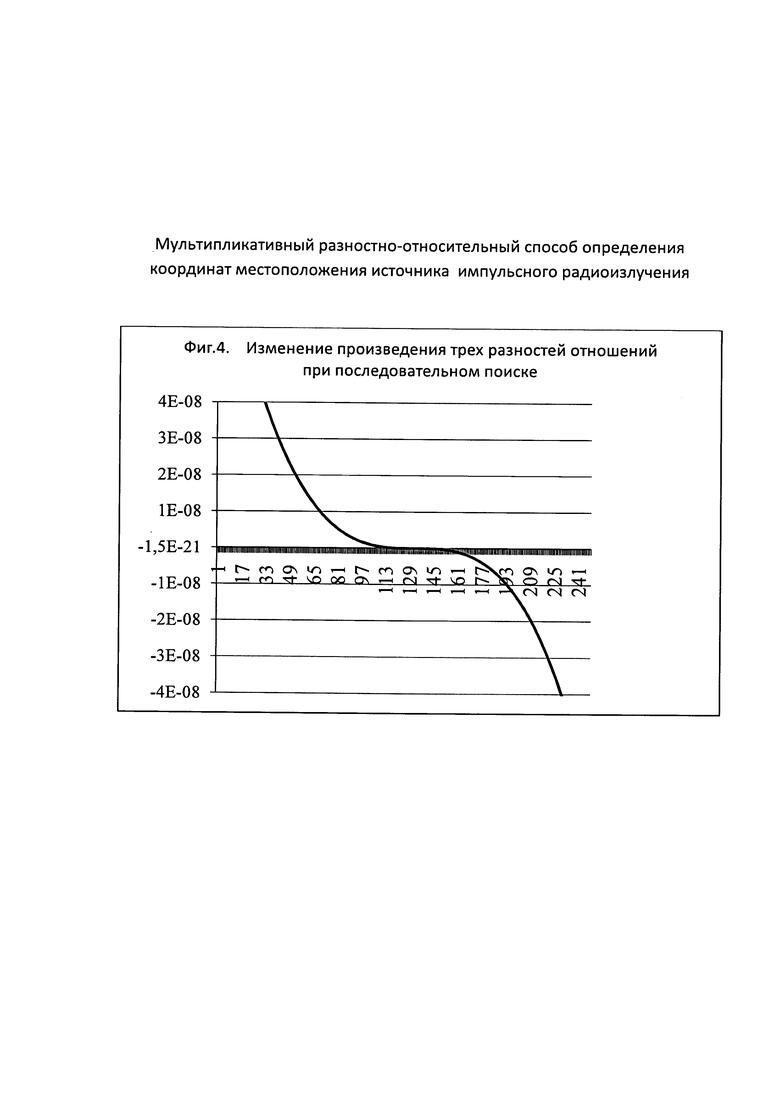
На фиг. 2 показаны зависимости разностей отношений первого типа, на фиг. 3 - три парные мультипликативные функции, на фиг. 4 - одна мультипликативная функция трех разностей отношений. В результате такого последовательного решения мультипликативных функций для каждого из параметров местоположения и усреднения результатов получают искомые координаты местоположения ИРИ.
Способ предполагает выполнение следующих операций:
1) Калибруют измеритель величины времени запаздывания прихода на посты сигналов (ИВЗ), используя массив эталонных РЭС с известными параметрами сигналов и координатами местоположения. Каждая эталонная РЭС должна находиться в зоне ЭМД всех четырех постов. Количество эталонных РЭС и распределение в зоне ЭМД постов должно быть достаточным для обеспечения заданной точности калибровки как по расстоянию, так и азимуту относительно постов.
2) На каждом посту измеряют величины моментов времени прихода сигналов ИРИ с помощью соответствующего измерителя, используя ненаправленные антенны поста, перестраивая при этом приемник на заданные фиксированные частоты. Результаты заносятся в банк данных своего компьютера.
3) Сведения, полученные в пп. 1 и 2, пересылают по каналу связи устройства связи из ведомых компьютеров на ведущий.
4) На ведущем посту вычисляют длительность времени запаздывания прихода сигналов на посты относительно друг друга, выражают все расстояния от ИРИ до постов через какое-нибудь одно расстояние.
5) На ведущем посту составляют определитель Кэли-Менгера размерностью 6×6.
6) Численным методом решают определитель Кэли-Менгера, тем самым определяют неизвестное расстояние, а затем находят и другие расстояния от постов до ИРИ.
7) Составляют  мультипликативных функций разностей отношений.
мультипликативных функций разностей отношений.
8) Вычисляют дихотомическим способом или способом наискорейшего спуска последовательно широту, долготу и высоту местоположения ИРИ, соответствующую точкам экстремумов, а также точкам перегиба всех составленных в п. 7 мультипликативных функций, фиксируя после усреднения каждый искомый параметр местоположения источника в этих точках как окончательный,
В предлагаемом способе устранены недостатки прототипа:
1) исключены какие либо сложные уравнения линий местоположения ИРИ со скрытыми в них ошибками сингулярности. В предлагаемом способе мультипликативные функции разностей отношений конечных величин (расстояний и величин запаздывания прихода сигналов) являются гладкими и не создают сингулярных погрешностей,
2) определение координат местоположения ИРИ выполняется радиоконтрольными постами, а не средствами, далекими от их практической реализации,
3) способ в связи с применением мультипликативных функций обеспечивает возможность использования результатов измерений в различных сочетаниях, что позволяет увеличить статистику и повысить точность определения координат.
4) способ является более универсальным по сравнению с известными, легко реализуемым (пример подобной технической реализации приведен в /10/) и лишен недостатков прототипа.
Отличительных особенностей способа не выявлено ни в аналогах, ни в прототипе, что свидетельствует о наличии в предлагаемом изобретении признаков новизны и соответствующего уровня изобретательности.
Литература
1. Корнеев И.В., Ленцман В.Л. и др. Теория и практика государственного регулирования использования радиочастот и РЭС гражданского применения.
1. Сборник материалов курсов повышения квалификации специалистов радиочастотных центров федеральных округов. Книга 2. - СПб.: СПбГУТ. 2003.
2. Липатников В.А., Соломатин А.И., Терентьев А.В. Радиопеленгация. Теория и практика. СПб. ВАС, 2006 г. - 356 с.
3. Способ определения координат местоположения источников радиоизлучения. Патент РФ №2430385 С2. Опубл. 27.09.2011 г. Авторы: Логинов Ю.И., Екимов О.Б., Рудаков Р.Н.
4. Разностно-дальномерный способ пеленгования источника радиоизлучения. Патент РФ №2325666 С2. Авторы: Сайбель А.Г., Сидоров П.А.
5. Разнесенный разностно-дальномерный пеленгатор. Патент РФ №2382378, С1. Авторы: Ивасенко А.В., Сайбель А.Г., Хохлов П.Ю.
6. Разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство. Патент РФ №2309420. Авторы: Сайбель А.Г., Гришин П.С.
7. Дальномерно-разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство. Патент РФ №2363010 С2, опубл. 27.10.2007 г. Авторы: Сайбель А.Г., Вайгель К.И.
8. Определение координат местоположения источников излучения при радиоконтроле. Труды 9-го международного симпозиума ЭМС - 2011. Авторы: Логинов Ю.И., Екимов О.Б., Антипин Б.М.
9. Кулаков Ю.И. Теория физических структур. Изд. Бином. 2004, 954 с.
10. Дальномерно-разностно-дальномерный способ определения координат местоположения источника радиоизлучения и реализующее его устройство. Патент РФ №2510038 С2. Опубл. 20.03.2014 г. Авторы: Логинов Ю.И., Екимов О.Б., Антипин Б.М., Гриценко А.А, Павлов В.Н., Портнаго Л.Б.


Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения местоположения источников импульсных радиоизлучений. Достигаемый технический результат – упрощение путем определения пространственных координат местоположения источников радиоизлучений (ИРИ) четырьмя стационарными постами без привлечения уравнений линий положения. Способ основан на использовании измерений значений моментов прихода сигналов на четыре стационарных радиоконтрольных поста, при этом на основе измеренных моментов времени прихода сигналов вычисляют разности времени распространения сигналов от ИРИ до постов, формируют определитель Кэли-Менгера размерностью 6×6, который для любых пяти точек евклидова пространства обращается в ноль, причем численное решение этого определителя дает значения расстояний от источника до постов и на основе пропорциональной зависимости отношений расстояний от поста до ИРИ и соответствующих им отношений величин запаздывания импульсных сигналов получают все сочетания мультипликативных разностей этих отношений, обработка мультипликативных разностей отношений выполняется дихотомическим методом или методами ускоренного спуска, в основе которого лежит принцип последовательного определения параметров местоположения ИРИ: широты - Xi, долготы - Yi и высоты - Zi по критерию минимума разностей отношений расстояний местоположения ИРИ до постов радиоконтроля, не расположенных на одной прямой, и соответствующих отношений величин запаздываний сигналов, измеренных на постах. 4 ил.
Мультипликативный разностно-относительный способ определения координат местоположения источника импульсного радиоизлучения, основанный на измерении величин запаздывания сигналов радиоизлучений на назначенных частотах в нескольких точках пространства радиоприемными устройствами, отличающийся тем, что для измерения моментов прихода сигналов используют предварительно откалиброванные n=4 поста радиоконтроля, один из которых используют в качестве базового, посты соединяют линиями связи с базовым, а измеренные значения моментов прихода сигналов с них передают на базовый пост, где вычисляют разность времени прихода сигналов, формируют определитель Кэли-Менгера размерностью 6×6, из которого вычисляют одно неизвестное расстояние от искомого источника до одного из постов, а затем через него и расстояния до других постов, составляют парные отношения расстояний, равнозначные отношениям величин времени распространения сигналов до постов, формируют  мультипликативных функций, представляющих сочетания, взятые по i, из полученных
мультипликативных функций, представляющих сочетания, взятые по i, из полученных  парных сочетаний разностей отношений расстояний, рассчитанных от точек измерения до местоположения искомого ИРИ по задаваемым из известного диапазона значениям широт, долгот и высот местоположений искомого ИРИ и соответствующих вычисленным парным отношениям расстояний, равнозначных отношениям измеренных величин времени распространения сигналов до постов, изменяют дихотомически или методом наискорейшего спуска последовательно каждый из параметров местоположения искомого источника радиоизлучения при неизменных значениях двух других и находят точки экстремумов и точки перегиба мультипликативных функций с усреднением и последовательной фиксацией каждого искомого параметра местоположения источника в этих точках как окончательного.
парных сочетаний разностей отношений расстояний, рассчитанных от точек измерения до местоположения искомого ИРИ по задаваемым из известного диапазона значениям широт, долгот и высот местоположений искомого ИРИ и соответствующих вычисленным парным отношениям расстояний, равнозначных отношениям измеренных величин времени распространения сигналов до постов, изменяют дихотомически или методом наискорейшего спуска последовательно каждый из параметров местоположения искомого источника радиоизлучения при неизменных значениях двух других и находят точки экстремумов и точки перегиба мультипликативных функций с усреднением и последовательной фиксацией каждого искомого параметра местоположения источника в этих точках как окончательного.
| ДАЛЬНОМЕРНО-РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2007 |
|
RU2363010C2 |
| ДИХОТОМИЧЕСКИЙ МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНОГО РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2562613C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ СТАЦИОНАРНО-МОБИЛЬНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2558638C2 |
| US 5870056 A, 09.02.1999 | |||
| WO 2013085587 A1, 13.06.2013 | |||
| СЫРЬЕВАЯ СМЕСЬ ДЛЯ ИЗГОТОВЛЕНИЯ ДРЕВЕСНОГО СТРОИТЕЛЬНОГО МАТЕРИАЛА | 2007 |
|
RU2332378C1 |

