Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения координат местоположения источников радиоизлучения (ИРИ), сведения о которых отсутствуют в базе данных (например, государственной радиочастотной службы или государственной службы надзора за связью). Изобретение может быть использовано при поиске местоположения несанкционированных средств связи.
Известны способы определения координат ПРИ, в которых используются пассивные пеленгаторы в количестве не менее трех, центр тяжести области пересечения выявленных азимутов которых на фронт прихода волны принимается за оценку местоположения. Основными принципами работы таких пеленгаторов являются амплитудные, фазовые и интерферометрические [1, 2]. Широко применяемым является амплитудный способ пеленгования, при котором используется антенная система, имеющая, диаграмму направленности с ярко выраженным максимумом главного лепестка и минимальными задним и боковыми лепестками. К таким антенным системам относятся, например, логопериодические или, антенны, имеющие кардиоидную характеристику и др. При амплитудном способе механическим вращением добиваются положения антенны, при котором выходной сигнал имеет максимальную величину. Такое направление принимают за направление на ИРИ. К недостаткам большинства пеленгаторов следует отнести высокую степень сложности антенных систем, коммутационных устройств и наличие многоканальных радиоприемников, а также необходимость в быстродействующих системах обработки информации.
Наличие в федеральных округах государственной радиочастотной службы взаимосвязанных через центральный пункт разветвленной сети радиоконтрольных постов, оборудованных средствами приема радиосигналов, измерения и обработки их параметров, позволяет дополнить их функции и задачами определения координат местоположения тех ИРИ, сведения о которых отсутствуют в базе данных, не прибегая к использованию сложных и дорогостоящих пеленгаторов.
Известен способ [3], в котором для определения координат местоположения ИРИ используют N, не менее четырех, стационарных радиоконтрольных постов, расположенных не на одной прямой, один из которых принимают за базовый, соединяя с остальными N-1 постами линиями связи, на всех постах осуществляют квазисинхронное сканирование по заданным фиксированным частотам настройки, усредняют измеренные значения уровней сигналов на каждой из сканируемых частот, а затем на базовом посту для каждого из сочетаний C4N (сочетаний из N по 4) на основании обратно пропорциональной зависимости отношений расстояний от поста до источника радиоизлучения и соответствующих им разностей уровней сигналов, выраженных в дБ, составляют три уравнения, каждое из которых описывает окружность равных отношений, по параметрам двух любых пар которых и определяют текущее среднее значение широты и долготы местоположения источника радиоизлучения. Недостатком этого способа является большое количество стационарных постов радиоконтроля.
Известны способы и устройства пеленгования (4, 5), которые могут быть использованы для целей определения координат.
Способ (4) основан на приеме сигналов тремя антеннами, образующими две пары измерительных баз, измерении разностей времени прихода сигналов ИРИ и детерминированных вычислений искомых координат.
К недостаткам способа следует отнести:
1) Большое количество антенн.
2) Способ не ориентирован на использование радиоконтрольных постов.
3) Измерительные базы для вычисления разности времен прихода сигналов ПРИ парами антенн существенно ограничивают разнос этих антенн, не говоря о нецелесообразности и большой технической сложности реализации способа.
Разнесенный разностно-дальномерный пеленгатор (5), состоящий из двух периферийных пунктов, центрального и системы единого времени, преследует цель разгрузить канал связи между пунктами. Периферийные пункты предназначены для приема, хранения, обработки сигналов и передачи фрагментов сигналов на ЦП, на котором вычисляется разность времени прихода сигналов. В системе единого времени применяется хронизатор, представляющий собой привязанный к шкале единого времени хранитель шкалы текущего времени (часы), предназначенный для привязки записываемых в ЗУ значений уровня сигнала к значению времени приема.
Данному пеленгатору свойственны следующие недостатки:
1) Не адаптирован к радиоконтрольным пунктам, используемым в филиалах федеральных округов государственной радиочастотной службы или государственной службы надзора за связью.
2) Большое количество специализированных пеленгационных (но не радиоконтрольных) постов.
3) Необоснованное и не раскрытое (хотя бы до функциональной схемы) применение системы единого времени на ЦП и хронизаторов на ПП, синхронизированных с системой единого времени.
4) Необходимость в наличии радиоканалов с большой пропускной способностью (до 625 Мбод) для передачи даже фрагментов сигналов с ПП1 и ПП2 на ЦП.
5) Для организации радиоканала необходимы радиопередающие устройства и получение разрешения на их работу в определенных условиях эксплуатации.
Известен разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство (6).
Способ, основанный на приеме сигналов ИРИ четырьмя антеннами, образующими три независимые измерительные базы, в разнесенных точках A, B, C, D таким образом, что объем фигуры, образованный из этих точек, больше нуля (VA,B,C,D>0). Сигнал одновременно принимается на все антенны, измеряют три независимые разности времени ΔtAC, ΔtBC, ΔtDC приема сигнала парами антенн, образующих измерительные антенные базы (АС), (ВС) и (DC). По измеренным разностям времен вычисляют разности дальностей от ИРИ до пар точек (А, С), (В, С), (D, C), для k-й тройки антенн, расположенных в точках А, В, С при k=1, B, C, D при k=2, D, C, A при k=3, вычисляют с помощью измеренных разностей дальностей значения угла γk, характеризующие угловое положение плоскости положения ИРИ Ωk, k=1, 2, 3 относительно соответствующей измерительной базы, и координаты точки Fk принадлежащей k-й плоскости положения ИРИ, вычисляют искомые координаты ИРИ как координаты точки пересечения трех плоскостей положения ИРИ Ωk, k=1, 2, 3 каждая из которых характеризуется координатами точек расположения k-й тройки антенн и вычисленными значениями угла γk и координатами точки Fk, отображают результаты вычисления координат ИРИ в заданном формате.
Этот способ и устройство, его реализующее, ближе к заявляемому, но также обладает рядом существенных недостатков:
1) Сложность практической реализации способа в связи с отсутствием возможности измерении разностей времен приема сигнала ИРИ только антеннами (измерительные радиоприемники в блок-схеме отсутствуют).
2) Необходимость сведения сигналов ИРИ с разнесенных на оптимальное расстояние до 0,6-0,7 R ЭМД антенн согласно (2) в одну точку, что практически реализовывать нецелесообразно.
3) Обеспечить измерение разности времени приема сигнала ИРИ на конкретных заданных частотах непосредственно с антенн (без использования радиоприемников, которые на блок-схеме не отображены) весьма сложно.
4) Для измерения разности времени приема сигнала непосредственно с антенн используются двухвходовые измерители.
5) Сложность технической реализации, обусловленная большим количеством различных вычислителей.
6) Неопределенность в построении поверхности положения в виде плоскости, перпендикулярной плоскости расположения антенн, так как антенны в точках A, B, C, D не располагаются в одной плоскости, о чем свидетельствует условие VA,B,C,D>0 в формуле изобретении.
Наиболее близким к заявляемому является дальномерно-разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство (7), принятый в качестве прототипа.
Способ основан на приеме сигнала тремя антеннами, измерении значений двух разностей времен приема сигнала ИРИ антеннами, измерении двух значений плотности потока мощности сигнала ИРИ, последующей обработке результатов измерений с целью вычисления координат точки, через которую проходит линия положения ИРИ.
Этот способ предполагает выполнение следующих операций:
- располагают три антенны в вершинах треугольника АВС;
- принимают сигнал на все три антенны;
- измеряют две разности времен ΔtAC и ΔtBC приема сигнала ИРИ антеннами;
- измеряют плотности потока мощности P1 и Р2 сигнала в точках размещения антенн 1 и 2;
- вычисляют значения разностей дальностей от ИРИ до пар антенн с использованием выражений ΔrAC=CΔtAC, ΔrBC=CΔtBC, ΔrAB=ΔrAC-ΔrBC, где С - скорость распространения электромагнитной волны;
- вычисляют координаты по полученной формуле.
В соответствии с (7) в состав устройства, реализующего способ, входит:
- три антенны;
- два измерителя разности времен;
- два измерителя плотности потока мощности;
- вычислительный блок;
- блок индикации.
Прототипу свойственны следующие недостатки:
1) Практическая сложность осуществления способа в связи с отсутствием возможности измерении разностей времен приема сигнала ИРИ только антеннами (измерительные радиоприемники в блок-схеме отсутствуют).
2) Необходимость сведения сигналов ИРИ с разнесенных на несколько километров антенн в одну точку для измерения двухвходовыми измерителями, что является существенной и не решенной авторами патента проблемой.
3) Не адаптирован к оборудованию радиоконтрольных постов (избыточны два измерителя разности времен, два измерителя плотности потока мощности, вычислительный блок, блок индикации), имеющихся в филиалах федеральных округов радиочастотной службы РФ, а поэтому не может быть там использован.
4) Применяемые приемные антенны могут быть только изотропными, так как в формулах вычисления координат отсутствуют параметры диаграмм их направленности.
Целью настоящего изобретения является разработка способа определения координат местоположения ИРИ двумя радиоконтрольными постами, что позволит применить такой способ практически во всех филиалах федеральных округов Радиочастотной службы Российской Федерации.
Эта цель достигается с помощью признаков, указанных в формуле изобретения, общих с прототипом: способ определения координат местоположения источников радиоизлучения, основанный на приеме сигналов ИРИ антеннами, измерении уровней и разности времени приема сигнала от ИРИ в нескольких точках пространства сканирующими радиоприемными устройствами и преобразованных в систему уравнений, и отличительных признаков: для определения координат местоположения ИРИ используют два одинаковых стационарных радиоконтрольных поста, один из которых принимают за ведущий, соединяя с другим линией связи, калибруют измеритель величины запаздывания прихода сигналов на посты, используя эталонные РЭС с известными параметрами сигналов и координатами местоположения, затем на постах осуществляют квазисинхронное сканирование и измерение уровней сигналов на заданных фиксированных частотах настройки и величину запаздывания прихода сигналов ПРИ, а затем передачу их на базовый пост, где вычисляют отношение уровней и разность запаздывания прихода сигналов ИРИ с учетом результатов калибровки измерителей, а также составляют два уравнения положения ИРИ, каждое из которых описывает окружность с радиусом равным расстоянию от поста до ИРИ, причем эти расстояния определяют через отношение уровней сигналов и разность времени приема сигнала, измеренных на постах с использованием только одной пары антенн с известными азимутом оси главного лепестка и диаграммой направленности, а координаты ИРИ определяют численным методом решения составленных уравнений. Заявляемый способ поясняется чертежами, на которых показаны:
- на фиг.1 - размещение двух постов радиоконтроля и положение ИРИ, Е - истинное положение, Еф - фиктивное; ψa, ψb - углы положения оси главного лепестка ДНА; АВ - линия базы; АЕ, BE - линии азимутов φa и φb на истинное положение ИРИ; АЕф, ВЕф - линии азимутов φаф и φbф на фиктивный ИРИ;
- на фиг.2 - блок-схема реализации предлагаемого способа,
Предлагаемый способ предполагает выполнение следующих операций:
1) Калибруют измеритель величины запаздывания прихода сигналов (ИВЗ) на посты, используя массив эталонных РЭС с известными параметрами сигналов и координатами местоположения. Каждая эталонная РЭС должна находиться в зоне ЭМД обоих постов. Их количество и распределение в зоне ЭМД должно быть достаточным для обеспечения заданной точности калибровки как по расстоянию, так и азимуту от постов.
2) На каждом посту измеряют уровни сигнала с помощью радиоприемника и величины запаздывания прихода сигналов ИРИ с помощью соответствующего измерителя, используя антенны поста с известной диаграммой направленности, перестраивая при этом приемник на заданные фиксированные частоты. Процедуру по измерению величин запаздывания прихода сигналов ИРИ выполняют аналогично п.1. Результаты заносятся в банк данных своего компьютера.
3) Пересылают по каналу связи устройства связи информацию из ведомого компьютера на ведущий.
4) Вычисляют разность величин запаздывания прихода сигналов на антенны постов как от эталонных РЭС, так и от ИРИ с учетом результатов по п.1, а также вычисляют отношение уровней сигналов от ИРИ, измеренных радиоприемниками постов.
5) Составляют систему двух уравнений, определяющих положение ИРИ, и решают ее численным методом, используя данные пункта 4.
Уравнения положения при этом будут иметь вид окружностей
 ,
,

где: ra, rb - расстояния от постов до искомого ИРИ, а 8- их разность (рис.1).
Квадраты отношений радиусов запишем через измеренные уровни сигналов как

Отношение квадратов расстояний, определяемое через разность уровней сигналов, измеренных на постах радиоконтроля А и В и выраженных в дБ, позволяет описать линию положения ПРИ, исключив при этом зависимость этой линии положения от мощности искомого источника радиоизлучения. При этом из (3), на основании вычисленной разности расстояний, определяются квадраты расстояний в виде:
Так как окружности пересекаются в двух точках, симметричных относительно линии базы (см. фиг.1), то возникает неоднозначность координат ИРИ. Для снятия возникающей неоднозначности можно выполнить повторные измерения с использованием направленной (с известной ДНА), например, логопериодической или кардиоидной поворотной антеннами. Но этот вариант связан с большими временными затратами и сложностью автоматизации такого решения. В заявляемом способе определение координат ИРИ с одновременным устранением неоднозначности осуществляют посредством измерения уровней сигналов непосредственно на направленные антенны. При этом направленные антенны не поворачивают в направлении максимума излучаемого сигнала, но положение оси главного ее лепестка на обоих постах должно быть известно, а лепестки ориентированы примерно в противоположных направлениях относительно базы. Такое положение осей главных лепестков антенн показано на фиг.1. Зависимость ЭДС на выходе антенны Е(Θ) связана с напряженностью поля вблизи ее и углом Θ, определяющим положение оси главного лепестка ДНА относительно азимута на ПРИ, может быть представлена как Е(Θ)=Емρ(Θ), где Ем - максимальная ЭДС, соответствующая направлению оси главного лепестка на источник, ρ(Θ) - функция определяющая диаграмму антенны. Теперь отношение уровней сигналов для направленных антенн n (θa, θb) можно представить через отношение уровней, получаемых от ненаправленных антенн nab как, 
Отсюда nab=n(θa, θb)/ρ(θa, θb) и квадраты радиусов (4) системы (1) будут представлены в виде:


Для решения системы уравнений (1) и (2), с учетом (5) и (6), необходимо определить углы θa, θb и знать ρ(Θ). Из фиг.1 они определяются как θa=φa-ψa, θb=φb-ψb, 
где: θаф=φаф-ψa, θbф=φbф-ψb,
Решение системы уравнений (1) и (2) выполняется численным методом последовательных итераций с учетом (3), (5) и (6).
Для устранения двузначности результаты численного определения координат проверяются путем сравнения уровней сигналов, получаемых на антеннах пунктов А и В. Если Ea(θa)>Eb(θb) при 3π/2<θa<π/2, то ИРИ находится в первой полуплоскости (выше линии базы). Если Ea(θa)>Eb(θb) при 3π/2<θa<π/2, то ИРИ находится во второй полуплоскости (ниже линии базы). При априорно снятой неопределенности расположения ИРИ относительно линии базы (например, при выполнении операции поиска ИРИ силовыми структурами) применяют ненаправленную (например, штыревую или биконическую антенны) и вычисление координат ведут по формулам (1), (2) с учетом (3) и (4).
В состав заявляемого устройства, реализующего заявляемый способ, входят два одинаковых радиоконтрольных поста - РКП А и РКП Б, содержащие:
1. Антенны 1, 6;
2. Радиоприемники (РП) 2, 7;
3. Измерители величин запаздывания сигналов (ИВЗ) 3, 8;
4. Компьютеры 4, 9;
5. Устройства связи 5, 10.
Один из постов (для примера, пусть это пост РКП А) является ведущим. Выходы антенн 1, 6 подключены на входы сканирующих радиоприемников 2, 7, управляющие компьютеры 4, 9 соединены двунаправленными связями с устройством связи 5, 10, предназначенными для передачи информации, сканирующими приемниками 2, 7 и измерителями величины запаздывания прихода сигналов 3, 8, вход каждого из которых соединен с выходом соответствующего сканирующего приемника. Измеренные приемниками сигналы ИРИ поступают по двунаправленной связи в компьютер соответствующего поста. В блоках 3, 8 осуществляется измерение величины запаздывания прихода сигналов как эталонных РЭС для создания файла калибровки, используемого при расчете координат, так и сигналов ИРИ и передача измеренных величин по запросу компьютера в его базу данных. Под управлением компьютера ведущего поста все сведения с ведомого поста передаются по каналу связи устройства связи 5, 10 в компьютер ведущего поста. Там производится расчет координат по уравнениям положения ИРИ с учетом диаграмм направленности антенн и калибровочных файлов. Вычисления координат проводятся численным методом последовательных приближений. Таким образом, предложенный способ позволяет определять координаты ИРИ в отличие от прототипа:
1) лишь двумя стационарными постами радиоконтроля;.
2) прием сигнала ИРИ осуществляется только на две антенны;
3) используются направленные антенны с выраженными максимумами диаграммы направленности, а не с круговой диаграммой направленности;
4) измерение величин запаздывания прихода сигналов на антенны постов осуществляется в месте размещения антенн одновходовым измерителем, используя при этом не сигналы с выходов антенн непосредстенно, а используя усиленные и отфильтрованные сигналы с выходов радиоприемников;
5) вычисление разности измеренных величин запаздывания прихода сигнала осуществляется не двухвходовым измерителем, соединенным с выходом разнесенных антенна, а на одном компьютере ведущего поста с использованием при этом полученных путем измерения калибровочных файлов;
6) главный лепесток каждой из антенн располагают в разных полуплоскостях относительно линии базы. принимая за истинные лишь координаты, относящиеся к той полуплоскости относительно линии базы, в которой находится главный лепесток антенны с наибольшим уровнем принятого сигнала.
7) вычисление координат местоположения осуществляется численным методом;
8) при априорно снятой неопределенности расположения ИРИ относительно линии базы применяют ненаправленную (например, штыревую или биконическую антенны) и вычисление координат ведут по формулам (1), (2) с учетом (3) и (4). Это упрощает реализацию устройства по предлагаемому способу
Таких особенностей не выявлено ни в аналогах, ни в прототипе и свидетельствует о наличии в предлагаемом изобретении признаков новизны и соответствующего уровня изобретательности.
Литература.
1. Корнеев И.В., Ленцман В.Л. и др. Теория и практика государственного регулирования использования радиочастот и РЭС гражданского применения.
Сборник материалов курсов повышения квалификации специалистов радиочастотных центров федеральных округов. Книга 2. - СПб.: СПбГУТ. 2003.
2. Липатников В.А., Соломатин А.И., Терентьев А.В. Радиопеленгация. Теория и практика. Спб. ВАС, 2006 г. - 356 с.
3. Способ определения координат местоположения источников радиоизлучения. Заявка №2009138071, опубл. 20.04.2011 г. Б.И. №11. Авторы: Логинов Ю.И., Екимов О.Б., Рудаков Р.Н.
4. Разностно-дальномерный способ пеленгования источника радиоизлучения. Патент РФ №2325666 С2. Авторы: Сайбель А.Г., Сидоров П.А.
5. Разнесенный разностно-дальномерный пеленгатор. Патент РФ №2382378, С1. Авторы: Ивасенко А.В., Сайбель А.Г., Хохлов П.Ю.
6. Разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство. Патент РФ №2309420. Авторы: Сайбель А.Г., Гришин П.С.
7. Дальномерно-разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство. Патент РФ №2363010,С2, опубл. 27.10.2007 г. Авторы: Сайбель А.Г., Вайгель К.И
Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения координат местоположения источников радиоизлучения (ИРИ). Достигаемый технический результат - снижение аппаратных затрат. Предлагаемый способ основан на приеме сигналов ИРИ антеннами, измерении разности времени приема сигнала от ИРИ в нескольких точках пространства сканирующими радиоприемными устройствами, преобразованных в систему уравнений, а также основан на использовании двух одинаковых, стационарных радиоконтрольных постов (РП), один из которых принимают за ведущий, соединяя с другим линией связи, при этом калибруют измеритель величины запаздывания прихода сигналов на (РП), используя эталонные радиоэлектронные средства (РЭС) с известными параметрами сигналов и координатами местоположения, затем на РП осуществляют квазисинхронное сканирование и измерение уровней сигналов на заданных фиксированных частотах настройки и величину запаздывания прихода сигналов ИРИ. Информацию с ведомого РП передают на ведущий, где вычисляют отношение уровней и разность запаздывания прихода сигналов ИРИ с учетом результатов калибровки измерителей, а также составляют два уравнения положения ИРИ, каждое из которых описывает окружность с радиусом, равным расстоянию от РП до ИРИ. Расстояния при этом определяют через отношение уровней сигналов и разность времени приема сигнала, измеренных на РП с использованием только одной пары антенн с известными азимутом оси главного лепестка и диаграммой направленности, главный лепесток каждой из которых расположен в разных полуплоскостях относительно линии базы, а координаты ИРИ определяют численным методом решения составленных уравнений, принимая за истинные лишь координаты, относящиеся в той полуплоскости относительно линии базы, в которой находится главный лепесток антенны с наибольшим уровнем принятого сигнала. Устройство, реализующее способ, содержит два одинаковых РП, один из которых является ведущим, и на каждом посту содержит направленные антенны, измерительный сканирующий радиоприеник, измеритель величины запаздывания прихода сигналов, компьютер и устройство связи, определенным образом соединенные между собой. 2 н.п. ф-лы, 2 ил.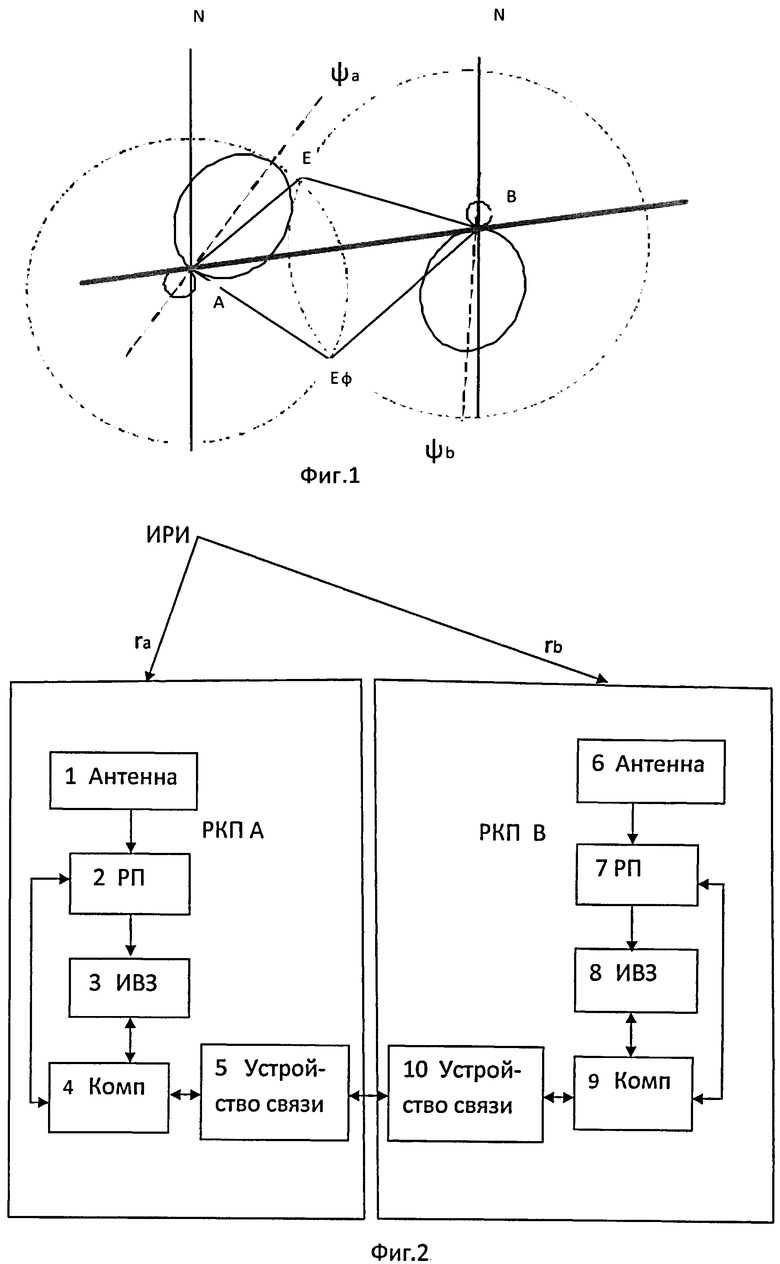
1. Способ определения координат местоположения источников радиоизлучения (ИРИ), основанный на измерении уровней и разности времени прихода сигнала от ИРИ на разнесенные антенны сканирующими радиоприемными устройствами и преобразованных в систему уравнений, отличающийся тем, что используют два стационарных радиоконтрольных поста, один из которых принимают за ведущий, соединяя с другим линией связи, калибруют измеритель величины запаздывания прихода сигналов на посты, используя эталонные радиоэлектронные средства с известными параметрами сигналов и координатами местоположения, на постах осуществляют квазисинхронное сканирование для выявления ИРИ, а затем выполняяют измерение уровней сигналов на заданных фиксированных частотах настройки и величин запаздывания прихода сигналов ИРИ, передачу их на ведущий пост, где вычисляют отношение уровней и разность запаздывания прихода сигналов ИРИ с использованием результатов калибровки измерителей, а также составляют два уравнения, каждое из которых описывает окружность с радиусом, равным расстоянию от поста до ИРИ, причем эти расстояния определяют через отношение уровней сигналов и разность величин запаздывания прихода сигнала, измеренных на постах с использованием только одной пары антенн с известными азимутом осей главного лепестка и диаграммами направленности, главный лепесток каждой из которых расположен в разных полуплоскостях относительно линии базы, а координаты ИРИ определяют численным методом решения составленных уравнений, принимая за истинные лишь координаты, относящиеся к той полуплоскости относительно линии базы, в которой находится главный лепесток антенны с наибольшим уровнем принятого сигнала.
2. Устройство для определения координат местоположения источников радиоизлучения, содержащее, соединенные двунаправленными линиями связи, посты, включающие приемные антенны, сканирующие радиоприемники, управляемые компьютером, отличающееся тем, что содержит два одинаковых радиоконтрольных поста, один из которых является ведущим, и на каждом посту измеритель величины запаздывания прихода сигналов, причем выходы антенн подключены на входы сканирующих радиоприемников, управляющий компьютер соединен двунаправленными связями с устройством связи, сканирующим приемником и измерителем величины запаздывания прихода сигналов, вход которого соединен с выходом сканирующего приемника.
| ДАЛЬНОМЕРНО-РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2007 |
|
RU2363010C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2380723C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2423719C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ СИГНАЛОВ С ПРОГРАММНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ (ППРЧ) | 2006 |
|
RU2335781C1 |
| US 5870056 A, 09.02.1999 | |||
| US 5652590 A, 29.07.1997 | |||
| JP 2009300284 A, 24.12.2009 | |||
| WO 9829756 A1, 09.07.1998 | |||
| СПОСОБ КИСЛОТНОЙ ОБРАБОТКИ КАРБОНАТНОГО ПЛАСТА | 2013 |
|
RU2535538C1 |

