Изобретение относится к области измерительной техники, а именно к вибрационным датчикам угловой скорости и датчикам линейного ускорения для инерциальной навигации.
Существует вибрационный датчик угловой скорости, имеющий основание, установленный на нем с помощью торсиона камертонный резонатор, установленные на основании и ножках камертона элементы системы возбуждения колебаний камертонного резонатора, датчик угла поворота торсиона (Бороздин В.Н. Гироскопические приборы и устройства систем управления. - М.: Машиностроение, 1990, с. 220 - 223).
Такой датчик угловой скорости имеет существенные габаритные размеры вследствие пространственности его конструкции.
Значительную миниатюризацию конструкции обеспечивает выполненный по планарной технологии вибрационный датчик угловой скорости, который и принят за прототип (патент Англии N 2156523 A, кл. G 01 C 19/96, G 01 P 15/08, 1985. Планарный инерциальный датчик).
Датчик угловой скорости содержит основание, установленную в нем плоскую пластину, во внутренней области которой выполнена внешняя рамка с первой осью вращения, отделенная по периферии от пластины и связанная с ней расположенными на противоположных сторонах вешней рамки упругими перемычками, во внутренней области внешней рамки выполнены одна или несколько внутренних рамок с параллельными друг другу вторыми осями вращения, каждая из внутренних рамок отделена по периферии от внешней рамки и друг от друга и соединена с внешней рамкой расположенными на противоположных сторонах упругими перемычками, причем вторые оси вращения перпендикулярны первой оси вращения и выполнены пересекающимися с ней; содержащий силовые преобразователи возбуждения колебаний относительно первой оси вращения, элементы которых расположены на одной из рамок и основании; содержащий расположенные на внутренних рамках и основании элементы датчиков положения внутренних рамок относительно вторых осей вращения, генератор возбуждения колебаний, соединенный с силовыми преобразователями, схемы съема и обработки сигналов датчика положения.
Недостатком этого датчика инерциальной первичной информации является ограничение по точности, вызванное погрешностью выделения из высокочастотного сигнала датчика положения низкочастотного сигнала углового положения внутренней рамки. Кроме того этот датчик не измеряет линейного ускорения.
Целью изобретения является повышение точности измерений и расширение функциональных возможностей датчика инерциальной первичной информации.
Данная цель достигается в датчике инерциальной первичной информации, содержащем основание, установленную в нем плоскую пластину, во внутренней области которой выполнена внешняя рамка с первой осью вращения, отделенная по периферии от пластины и связанная с ней расположенными на противоположных сторонах внешней рамки упругими перемычками, во внутренней области внешней рамки выполнены одна или несколько внутренних рамок с параллельными друг другу вторыми осями вращения, каждая из внутренних рамок отделена по периферии от внешней рамки и друг от друга и соединена с внешней рамкой расположенными на ее противоположных сторонах упругими перемычками, причем вторые оси вращения перпендикулярны первой оси вращения и выполнены пересекающимися с ней; содержащем силовые преобразователи системы возбуждения угловых колебаний относительно первой оси вращения, элементы которых расположены на одной из рамок и основании; содержащий расположенные на внутренних рамках и основании элементы датчиков положения внутренних рамок относительно вторых осей вращения, генератор возбуждения колебаний, соединенный с силовыми преобразователями, схемы съема и обработки сигналов датчиков положения, тем, что внешняя рамка выполнена из двух частей, отделенных друг от друга в области первой оси вращения, каждая часть внешней рамки соединена с пластиной расположенными на ее противоположных сторонах упругими перемычками, образующими параллельные первой оси вращения оси вращения каждой части относительно друг друга и основания, введены датчики положения каждой части внешней рамки относительно основания, элементы которых расположены соответственно на каждой части внешней рамки и на основании.
В одном из вариантов выполнения датчика инерциальной первичной информации элементы силовых преобразователей системы возбуждения колебаний расположены на основании, на каждой части внешней рамки или на внутренних рамках.
В другом варианте выполнения датчика инерциальной первичной информации дополнительно к элементам силовых преобразователей на основании и на одной из рамок введены элементы силовых преобразователей на основании и на других остальных рамках.
В усовершенствованной конструкции датчика параллельные первой оси вращения ось вращения каждой части внешней рамки и ось изгиба перемычки, соединяющей соответствующую часть внешней рамки с внутренней рамкой, выполнены соосно.
В дальнейшем усовершенствовании датчика инерциальной первичной информации силовые преобразователи системы возбуждения колебаний выполнены в виде электростатических силовых преобразователей с металлизированными поверхностями их элементов на основании и пластине, датчики положения выполнены емкостными с металлизированными поверхностями их элементов на основании и пластине, металлизированные поверхности электростатических силовых преобразователей и датчиков положения на пластине выполнены единым элементом, первый выход генератора возбуждения колебаний подключен к одним металлизированным участкам силовых преобразователей на разных частях основания по разные стороны от первой оси вращения, второй выход генератора - к другим металлизированным участкам, расположенным на противоположных вышеуказанным частях основания по разные стороны от первой оси вращения.
При выполнении внешней рамки из двух частей обеспечивается повышение частоты вибрационных колебаний вследствие уменьшения момента инерции каждой части внешней рамки из-за того, что их движение происходит относительно оси, параллельной первой оси вращения, но расположенной ближе к центру масс каждой части внешней рамки.
Увеличение частоты колебаний приводит к повышению кинетического момента датчика угловой скорости, что повышает точность измерения угловой скорости.
Путем образования силовых преобразователей системы возбуждения колебаний на каждой из внешних рамок, на внутренней рамке и на основании увеличивается момент, действующий на подвижную систему, что приводит к увеличению амплитуды колебаний, увеличению кинетического момента датчика угловой скорости и повышению точности измерения угловой скорости.
Выполнением вешней рамки из двух частей, каждая из которых соединена парой противоположно расположенных упругих перемычек и имеет свою ось вращения, расположением на каждой части внешней рамки и на основании элементов датчиков положения достигается то, что каждая часть внешней рамки получает степень свободы относительно своей оси вращения, образуя чувствительный элемент акселерометра для измерения линейного ускорения. Тем самым расширяются функциональные возможности датчика инерциальной первичной информации в качестве как датчика угловой скорости, так и акселерометра.
При исполнении датчика инерциальной первичной информации, у которого элементы электростатического силового преобразователя и емкостного датчика положения выполнены на пластине единым элементом, повышается точность измерения угловой скорости и линейного ускорения, т.к. увеличивается площадь элементов датчиков положения на пластине вследствие уменьшения площади, занимаемой соединительными проводниками, что приводит к увеличению выходных сигналов датчика угловой скорости и акселерометра и, следовательно, к увеличению разрешающей способности обоих датчиков инерциальной первичной информации.
Выполнением соосными оси вращения каждой части внешней рамки с осью изгиба упругой перемычки, соединяющей внутреннюю рамку с соответствующей частью внешней рамки, достигается увеличение момента инерционных сил, действующих на чувствительный элемент акселерометра, что повышает разрешающую способность и точность измерения линейных ускорений с помощью акселерометров.
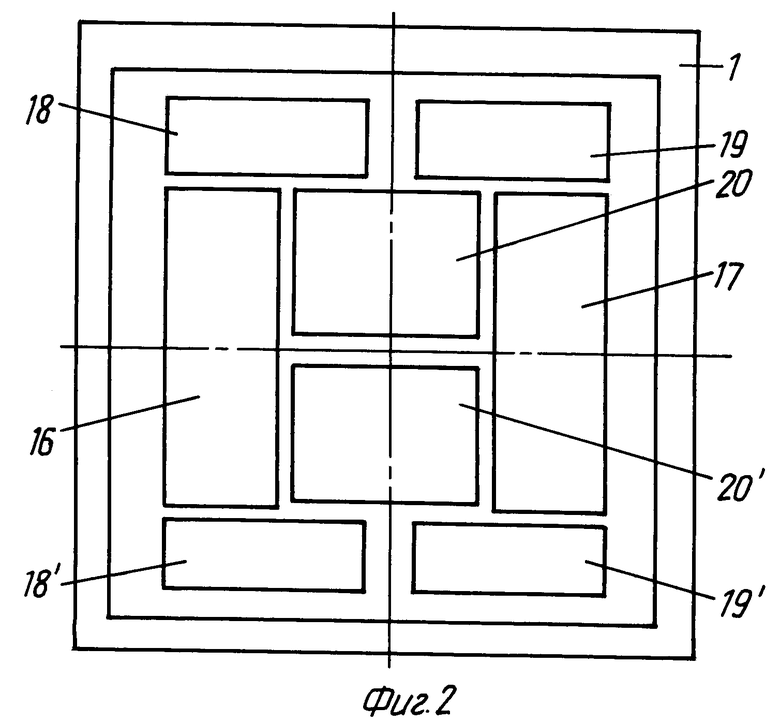
На фиг. 1 изображен общий вид датчика инерциальной первичной информации; на фиг. 2, 3 представлены виды основания; на фиг. 4 дана схема возбуждения колебаний; на фиг. 5, 6 показаны схемы датчиков положения акселерометров и датчика угловой скорости соответственно; фиг. 7 представляет общий вид датчика инерциальной первичной информации с несколькими внутренними рамками на примере датчика инерциальной первичной информации с двумя датчиками угловой скорости и двумя акселерометрами.
Датчик инерциальной первичной информации (фиг. 1) содержит основание 1 с установленной в нем плоской пластиной 2, во внутренней области которой выполнены отделенные по периферии от пластины 2 и друг от друга первая 3 и вторая 4 части внешней рамки.
Первая часть 3 внешней рамки двумя своими противоположными сторонами соединена с пластиной 2 с помощью упругих перемычек 5, 5', расположенных в промежутке между пластиной 2 и первой частью 3 внешней рамки, где первая часть внешней рамки отделена от второй части 4.
Вторая часть 4 внешней рамки двумя своими противоположными сторонами соединена с пластиной 2 посредством упругих перемычек 6, 6', расположенных в промежутке между пластиной 2 и второй частью 4 внешней рамки, где вторая часть 4 внешней рамки отделена от первой части 3.
Во внутренней области первой 3 и второй 4 частей внешней рамки выполнена отделенная от них по периферии внутренняя рамка 7, соединенная с одной стороны упругой перемычкой 8 с первой частью 3 внешней рамки, а с другой стороны - упругой перемычкой 8' с второй частью 4 внешней рамки.
Первая часть 3, вторая часть 4 внешней рамки вместе с подсоединенной к ним с помощью перемычек 8, 8' внутренней рамкой 7 образуют подвижную систему датчика инерциальной первичной информации, имеющую степень углового движения относительно первой оси Y-Y, проходящей через области, разделяющие друг от друга первую часть 3 и вторую части 4 внешней рамки. Эта степень свободы образована вследствие того, что первая часть 3 внешней рамки имеет степень углового движения относительно оси YI-YI, параллельной оси Y-Y и проходящей через перемычки 5, 5', а вторая часть 4 внешней рамки имеет степень углового движения относительно оси YII-YII, параллельной оси Y-Y и проходящей через перемычки 6, 6'. Перемычки 8, 8' расположены так, что проходящая через них вторая ось вращения X-X, перпендикулярная первой оси вращения Y-Y и пересекающаяся с ней, обеспечивает угловое движение внутренней рамки 7 относительно первой части 3 и второй части 4 внешней рамки.
Ось вращения YI-YI вместе с осью изгиба YIII-YIII упругой перемычки 8 обеспечивают угловое движение первой части 3 внешней рамки относительно основания 1 и внутренней рамки 7. Ось вращения YII-YII вместе с осью изгиба YIV-YIV упругой перемычки 8' дают степень углового движения второй части 4 внешней рамки относительно основания 1 и внутренней рамки 7.
Центры масс первой части 3 и второй части 4 внешней рамки не совпадают с осями вращения YI-YI и YII-YII, поэтому первая часть 3 внешней рамки обладает маятниковостью относительно оси YI-YI, а вторая часть внешней рамки имеет маятниковость относительно оси YII-YII.
В случае выполнения силовых преобразователей электростатическими, а датчиков положения емкостными их элементы на основании и внешней и внутренней рамках выполнены в виде металлизированных пластин. При этом на одной стороне пластины 2 первой части 3 внешней рамки расположена пластина 9 ротора первого электростатического силового преобразователя, роторы 10, 10' датчиков положения первой части 3 внешней рамки относительно основания, на второй части 4 внешней рамки - пластина 11 ротора второго силового преобразователя, пластины 12, 12' ротора датчика положения второй части 4 внешней рамки относительно основания, на внутренней рамке 7 - пластина 13 ротора датчика положения, внутренней рамки 7 относительно второй оси вращения X-X, вторая пластина 14 ротора первого силового преобразователя, вторая пластина 15 ротора второго силового преобразователя.
На второй стороне пластины 2 выполнены аналогичные элементы силовых преобразователей и датчиков положения, гальванически соединенные с соответствующими элементами на первой стороне пластины 2.
На одной части основания 1 (фиг.2), находящейся под пластиной 2, образованы пластина 16 статора первого силового преобразователя, пластина 17 статора второго силового преобразователя, пластины 18, 18' статора датчика положения первой части 3 внешней рамки, относительно основания, пластины 19, 19' статора датчика положения второй части 4 внешней рамки относительно основания, пластины 20, 20' статора датчика положения внутренней рамки 7 относительно второй оси вращения X-X.
На второй части основания 1 (фиг.3), находящейся над пластиной 2, выполнены пластина 21 статора первого силового преобразователя, пластина 22 статора второго силового преобразователя, пластины 23, 23' статора датчика положения первой части 3 внешней рамки относительно основания, пластины 24, 24' статора датчика положения второй части 4 внешней рамки относительно основания, пластины 25, 25' статора датчика положения внутренней рамки 7 относительно второй оси вращения X-X.
Первая часть 3 и вторая часть 4 внешней рамки, внутренняя рамка 7 вместе образуют ротор вибрационного гироскопа. Первая часть 3 внешней рамки является чувствительным элементом первого акселерометра, вторая часть 4 внешней рамки служит чувствительным элементом второго акселерометра.
Возбуждение угловых колебаний ротора вибрационного гироскопа осуществляется с помощью электронного генератора 26, подключаемого к двум электростатическим силовым преобразователям (фиг. 4). Первый из них имеет ротор, образованный электрически соединенными пластиной 9 на первой части 3 внешней рамки и пластиной 14 на внутренней рамке 7, и статор, имеющий пластину 16 на одной части основания 1 и пластину 21 на второй части основания 1. Второй силовой преобразователь имеет ротор, состоящий из электрически соединенных пластин 11 и на второй части 4 внешней рамки и пластины 15 на внутренней рамке 7, а также статор, образованный пластиной 17 на первой части основания 1 и пластиной 22 и на второй части основания 1.
Генератор 26 имеет два выхода, объединенных общим проводом. Выходные сигналы генератора 26 являются однополярными периодическими импульсами, причем фаза второго выходного сигнала сдвинута на 180o относительно первого выходного сигнала. Общий провод генератора 26 подсоединен к пластинам 9, 11, 14, 15 роторов силовых преобразователей, один из выходов подключен к пластинам 16 и 22, второй выход - к пластинам 15, 21 статоров силовых преобразователей.
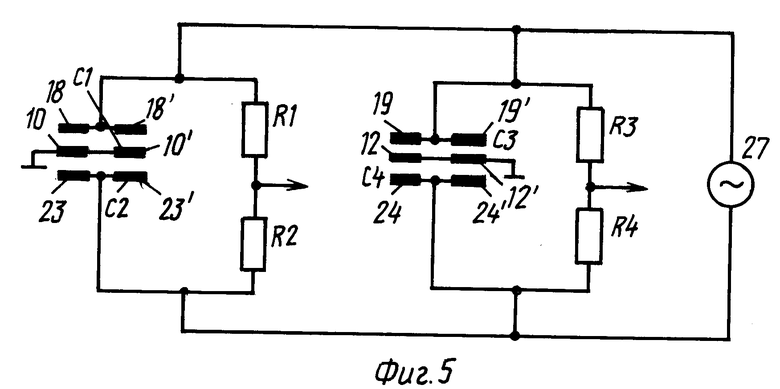
Датчики положения акселерометров (фиг.5) выполнены по емкостной мостовой схеме. Датчик положения первого акселерометра содержит переменный конденсатор C1, образованный соединенными электрическими пластинами 10, 10' на первой части 3 внешней рамки и соединенными вместе пластинами 18, 18' на первой части основания 1, переменный конденсатор C2, образованный теми же пластинами 10, 10' на первой части 3 внешней рамки и соединенными вместе пластинами 23, 23' на второй части основания 1, резисторы R1, R2. В одну диагональ мостовой схемы датчика положения включен генератор 27 переменного напряжения, съем сигнала датчика положения осуществляется со второй диагонали моста.
Датчик положения второго акселерометра имеет конденсатор C3, образованный соединенными вместе пластинами 12, 12' на второй части 4 внешней рамки и пластинами 19, 19' на первой части основания 1, конденсатор C4, образованный теми же пластинами 12, 12' и соединенными вместе пластинами 24, 24' на второй части основания 1, резисторы R3, R4. В диагональ питания моста включен генератор 27, съем сигнала датчика положения осуществляется со второй диагонали мостовой схемы.
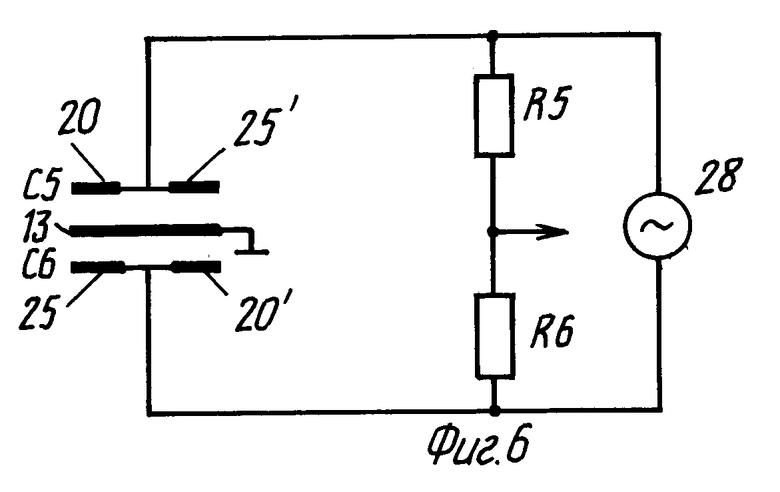
Датчик положения датчика угловой скорости (фиг. 6) выполнен по мостовой схеме и содержит включенный в одну диагональ моста генератор 28 переменного напряжения, конденсатор C5, образованный пластиной 13 на внутренней рамке 7 и соединенными вместе пластинами 20, 25' на основании 1, конденсатор C6, образованный той же пластиной 13 и соединенными вместе пластинами 20', 25 на основании 1, резисторы R5, R6. Съем сигнала датчика положения производится со второй диагонали моста.
В датчике инерциальной первичной информации с двойным резервированием, содержащим два акселерометра и два датчика угловой скорости (фиг. 7), во внутренней области первой части 3 и второй части 4 внешней рамки в дополнение к внутренней рамке 7 с осью вращения X-X образована вторая внутренняя рамка 29, которая отсоединена по периферии от внутренней рамки 7 и первой части 3 и второй части 4 внешней рамки и соединена упругими перемычками 30, 30' с первой частью 3 и второй частью 4 внешней рамки. По оси вращения перемычек 30, 30' проходит ось вращения X1-X1 второй внутренней рамки 29, параллельная оси X-X. Поверхности первой части 3 и второй части 4 внешней рамки, первой внутренней рамки 7 и второй внутренней рамки 29 выполнены в виде общей металлизированной поверхности 31, играющей роль пластин роторов электростатических преобразователей системы возбуждения колебаний, пластин роторов датчиков положения акселерометров и датчиков угловой скорости. При этом первая часть 3 внешней рамки вместе с частью металлизированной поверхности 31 образуют чувствительный элемент первого акселерометра вместе с ротором датчика положения. Вторая часть 4 внешней рамки с частью металлизированной поверхности 31 образуют чувствительный элемент второго акселерометра с ротором датчика положения. Первая часть 3 и вторая часть 4 внешней рамки вместе с первой внутренней рамкой 7 составляют ротор первого вибрационного гироскопа. Первая часть 3 и вторая часть 4 внешней рамки вместе со второй внутренней рамкой 29 составляют ротор второго вибрационного гироскопа. Металлизированная поверхность 31 служит в качестве роторов силовых преобразователей и датчиков положения первого и второго датчиков угловой скорости.
Два чувствительных элемента акселерометра со своими датчиками положения образуют два акселерометра. Два ротора вибрационного гироскопа вместе с системами возбуждения колебаний и датчиками положения образуют два датчика угловой скорости.
При выполнении пластин роторов силовых преобразователей, роторов датчиков положения в виде отдельных элементов на фиг. 1 проводниками 32 - 35 показано, каким путем производится электрическое соединение элементов подвижной части с внешними цепями.
Пластина 2 вместе с ее элементами может быть выполнена методом планарной интегральной технологии, при этом в качестве подложки может быть использована пластина из кремния или окиси кремния и других материалов.
Для получения соосности осей вращения чувствительных элементов акселерометра перемычки 5, 5', 8 располагаются так, чтобы оси YI-YI и YIII-YIII совпадали, а перемычки 6, 6', 8' размещаются так, чтобы совпадали оси YII-YII и YIV-YIV.
Датчик инерциальной первичной информации работает следующим образом. При подаче в начальный момент с первого генератора 26 напряжения на пластины 9, 14, 16 первого силового преобразователя и пластины 11, 15, 22 второго силового преобразователя пластины 9, 14 притягиваются электростатической силой к пластине 16, пластины 11, 15 притягиваются к пластине 22. Так как пластины 16 и 22 на основании 1 находятся по разные стороны от пластины 2, то происходит поворот в одну сторону относительно оси Y-Y ротора вибрационного гироскопа, содержащего первую часть 3, вторую часть 4 внешней рамки и внутреннюю рамку 7. В следующий момент времени напряжение с первого выхода генератора 26 снимается, а со второго выхода подается напряжение на пластины 9, 14, 21 первого силового преобразователя и пластины 11, 15, 17 второго силового преобразователя, и ротор гироскопа поворачивается в противоположную сторону. Таким образом осуществляется колебательное движение ротора вибрационного гироскопа относительно оси Y-Y, и создается переменный кинетический момент ротора, вектор которого направлен по оси Y-Y.
При вращении датчика инерциальной первичной информации относительно входной оси, перпендикулярной плоскости, в которой расположены оси X-X и Y-Y, возникает гироскопический момент, вектор которого направлен по оси X-X. Гироскопический момент вызывает поворот внутренней рамки 7 относительно оси X-X. Угол поворота внутренней рамки 7 относительно оси X-X пропорционален угловой скорости вращения датчика угловой скорости относительно входной оси.
Если, например, векторы кинетического момента, угловой скорости направлены так, что гироскопический момент вызывает такое направление поворота внутренней рамки 7, что пластина 13 на внутренней рамке 7 приближается к пластинам 20, 25' на основании и отодвигается от пластин 20', 25 на основании. Тогда емкость конденсатора C5 увеличивается, емкость конденсатора C6 уменьшается, мостовая схема становится несбалансированной, и с выхода датчика положения датчика угловой скорости поступает сигнал определенной фазы о величине измеряемой угловой скорости. При противоположном направлении вектора угловой скорости получается выходной сигнал датчика угловой скорости противоположной фазы. Таким образом с помощью датчика угловой скорости по величине и фазе выходного сигнала определяется величина измеряемой угловой скорости и направление вращения.
Так как оба акселерометра идентичны по конструкции и принципу работы, то рассмотрим их работу на примере акселерометров с чувствительным элементом в виде первой части 3 внешней рамки.
При наличии ускорения по измерительной оси акселерометра, перпендикулярной образованной осями X-X и Y-Y плоскости, под действием инерционной силы вследствие наличия маятниковости первая часть 3 внешней рамки поворачивается относительно оси YI-YI. Если направление ускорения таково, что при этом пластины 10, 10' на первой части 3 внешней рамки сближается с пластинами 18,18' на основании 1, то емкость конденсатора C1 увеличивается, емкость конденсатора C2 уменьшается. Тогда мостовая схема датчика положения первого акселерометра становится несбалансированной, и с выхода акселерометра поступает выходной сигнал определенной фазы, величина которого пропорциональна измеряемому ускорению. При противоположном направлении ускорения с выхода акселерометра поступает сигнал противоположной фазы. Таким образом с помощью акселерометра по величине выходного сигнала и его фазе определяются величина и направление измеряемого ускорения.
Аналогично при наличии ускорения под действием инерционной силы отклоняется относительно оси YII-YII вторая часть 4 внешней рамки, изменяются емкости конденсаторов C3 и C4, и с выхода второго акселерометра поступает сигнал о величине и направлении ускорения.
В датчике инерциальной первичной информации с двойным реверсированием, содержащем два акселерометра и два датчика угловой скорости, первый акселерометр с чувствительным элементом в виде первой части 3 внешней рамки и второй акселерометр с чувствительным элементом в виде второй части 4 внешней рамки измеряют ускорение по одной и той же измерительной оси, перпендикулярной образованной осями X-X и Y-Y плоскости.
Первый датчик угловой скорости с ротором, образованным первой частью 3, второй частью 4 внешней рамки и внутренней рамкой 7, второй датчик угловой скорости с ротором, образованным первой частью 3, второй частью 4 внешней рамки и внутренней рамкой 29, измеряют одну и ту же угловую скорость, вектор которой перпендикулярен образованной осями X-X и Y-Y плоскости.
Так как пластины роторов силовых преобразователей и датчиков положения объединены общей "землей", то они могут быть выполнены единым элементом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2018133C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 1993 |
|
RU2098761C1 |
| АКСЕЛЕРОМЕТР | 1993 |
|
RU2039996C1 |
| ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2006 |
|
RU2329467C1 |
| ПРЕЦИЗИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2417352C1 |
| АКСЕЛЕРОМЕТР | 1994 |
|
RU2083989C1 |
| МУЛЬТИСЕНСОР | 1996 |
|
RU2104559C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ ОПОР ТРЕНИЯ АКСЕЛЕРОМЕТРА | 1993 |
|
RU2039995C1 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРАЦИОННОЙ УСТОЙЧИВОСТИ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ | 2005 |
|
RU2282153C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1993 |
|
RU2046350C1 |



Использование: в измерительной технике, а именно в вибрационных датчиках угловой скорости и датчиках линейного ускорения для инерциальной навигации. Сущность изобретения: датчик содержит основание с плоской пластиной, во внутренней области которой расположены внешняя, выполненная из двух частей, и внутренняя рамки, соединенные упругими перемычками друг с другом и с пластиной, генератор и силовые преобразователи возбуждения колебаний рамок, датчик углового положения. 7 ил.
| СПОСОБ УСОВЕРШЕНСТВОВАНИЯ ЛИТИЕВОГО ЭЛЕМЕНТА | 1996 |
|
RU2156523C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
