ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее раскрытие в целом относится к системам нанесения покрытий и, в частности, к автоматизированной системе и способу печати изображений на поверхности с использованием роботизированного механизма.
УРОВЕНЬ ТЕХНИКИ
[0002] Покраска воздушного летательного аппарата является относительно сложным и трудоемким процессом вследствие широкого диапазона размеров, уникальной геометрии и большой площади поверхности воздушного летательного аппарата. Например, крылья, выступающие из фюзеляжа, могут помешать процессу покраски. Высота вертикального оперения над горизонтальным оперением может затруднять доступ к внешним поверхностям вертикального оперения. Сложные схемы окраски, которые могут быть обусловлены ливреей воздушного летательного аппарата, приводят к дополнительному увеличению продолжительности времени, необходимого для его покраски. В этом отношении стандартная ливрея авиакомпании может включать в себя изображения или рисунки со сложными геометрическими формами и цветовыми сочетаниями и может включать в себя название и логотип авиакомпании, которые могут быть нанесены на различные места воздушного летательного аппарата, такие как фюзеляж, вертикальное оперение и гондолы двигателя.
[0003] Обычные способы покраски воздушного летательного аппарата требуют использования множества этапов наложения маски, покраски и удаления маски. Для нанесения на воздушный летательный аппарат ливреи, имеющей множество цветов, может быть необходимым выполнение этапов наложения маски, покраски и удаления маски для каждого цвета в ливрее, что может дополнительно увеличить общую продолжительность времени, необходимого для покраски воздушного летательного аппарата. Кроме того, ливрею необходимо нанести на воздушный летательный аппарат настолько точно, чтобы избежать появления промежутков, через которые в противном случае может быть виден обычно белый грунтовый слой, что может отрицательно сказаться на общем внешнем виде воздушного летательного аппарата. Кроме того, управление процессом нанесения краски на поверхности воздушного летательного аппарата должно осуществляться на высоком уровне, чтобы обеспечить приемлемый уровень толщины покрытия в соответствии с эксплуатационными требованиями (например, к весу).
[0004] Как видно из сказанного, существует потребность в системе и способе окраски воздушного летательного аппарата, включающих в себя нанесение сложных и/или многоцветных изображений точно и эффективно с точки зрения затрат и времени.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] Указанные выше потребности, связанные с покраской воздушного летательного аппарата, в частности являются предметом рассмотрения настоящего раскрытия и частично удовлетворены им, при этом настоящее раскрытие обеспечивает создание системы для печати изображения на поверхности с использованием робота, имеющего по меньшей мере один манипулятор. Печатающая головка может быть установлена на манипуляторе и может быть выполнена с возможностью перемещения манипулятором поверх поверхности по траектории растеризации во время печати участка изображения на указанной поверхности. Участок изображения может иметь противоположные боковые кромки. Печатающая головка может быть выполнена с возможностью печати участка изображения с полосой градиента изображения по меньшей мере вдоль одной из противоположных боковых кромок, причем интенсивность изображения в пределах полосы градиента изображения уменьшается от внутренней части полосы градиента изображения к боковой кромке.
[0006] Также раскрыта система для печати изображения, содержащая робота, имеющего по меньшей мере один манипулятор и печатающую головку, установленную на манипуляторе. Печатающая головка может быть выполнена с возможностью перемещения манипулятором поверх поверхности по траектории растеризации во время печати нового участка изображения на указанной поверхности. Система может включать в себя механизм для печати привязочной линии, выполненный с возможностью печати привязочной линии на указанной поверхности во время печати нового участка изображения. Система может включать в себя датчик привязочной линии, выполненный с возможностью обнаружения привязочной линии существующего участка изображения и передачи роботу сигнала, заставляющего манипулятор осуществлять регулировку печатающей головки таким образом, что боковая кромка нового участка изображения выровнена с боковой кромкой существующего участка изображения.
[0007] Кроме того, раскрыт способ печати изображения на поверхности. Способ может включать в себя размещение манипулятора робота возле поверхности. Манипулятор может иметь печатающую головку, установленную на манипуляторе. Способ дополнительно может включать в себя перемещение, с использованием манипулятора, печатающей головки поверх поверхности по траектории растеризации во время печати участка изображения на указанной поверхности. Кроме того, способ может включать в себя печать полосы градиента изображения по меньшей мере вдоль одной боковой кромки участка изображения во время печати участка изображения. Полоса градиента изображения может иметь интенсивность изображения, которая уменьшается вдоль направления к боковой кромке.
[0008] Дополнительно способ печати изображения на поверхности может включать в себя печать, с использованием печатающей головки, установленной на манипуляторе робота, нового участка изображения на указанной поверхности при перемещении печатающей головки поверх поверхности по траектории растеризации. Способ дополнительно может включать в себя печать привязочной линии на указанной поверхности во время печати нового участка изображения. Способ также может включать в себя обнаружение, с использованием датчика привязочной линии, привязочной линии существующего участка изображения во время печати нового участка изображения. Кроме того, способ может включать в себя регулировку бокового положения нового участка изображения на основании обнаруженного положения привязочной линии с выравниванием боковой кромки нового участка изображения с боковой кромкой существующего участка изображения.
[0009] Указанные признаки, функции и преимущества, которые были описаны выше, могут быть получены независимо в различных вариантах реализации настоящего раскрытия или могут быть скомбинированы в других вариантах реализации, дополнительные подробности которых могут быть очевидными со ссылкой на сопровождающие описание и фигуры чертежей, приведенные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00010] Эти и другие признаки настоящего раскрытия станут более очевидными со ссылкой на чертежи, на которых одинаковые номера везде относятся к одинаковым частям и на которых:
[00011] на ФИГ. 1 представлена блок-схема примера системы формирования изображений;
[00012] на ФИГ. 2 представлен перспективный вид воздушного летательного аппарата, окруженного множеством порталов, поддерживающих одну или более систем формирования изображений для печати одного или более изображений на воздушном летательном аппарате;
[00013] на ФИГ. 3 представлен перспективный вид воздушного летательного аппарата, изображающий один из порталов, размещенный возле вертикального оперения и осуществляющий поддержку системы формирования изображений для печати изображения на вертикальном оперении;
[00014] на ФИГ. 4 представлен вид с конца воздушного летательного аппарата, изображающий системы формирования изображений, размещенные на противоположных сторонах воздушного летательного аппарата;
[00015] на ФИГ. 5 представлен перспективный вид робота, показанный вдоль линии 5 по ФИГ. 4, и иллюстрирующий робота, установленного на траверсе портала и имеющего печатающую головку, установленную на манипуляторе робота;
[00016] на ФИГ. 6 представлен вид сбоку системы формирования изображений, показанной вдоль линии 6 по ФИГ. 4, и иллюстрирующий печатающую головку, выполняющую печать изображения на вертикальном оперении;
[00017] на ФИГ. 7 представлен вид сверху примера печатающей головки, перемещаемой по траектории растеризации с формированием участка изображения, имеющего полосу градиента изображения, перекрывающую полосу градиента изображения соседнего участка изображения;
[00018] ФИГ. 8 представляет собой вид в разрезе печатающей головки, показанный вдоль линии 8 по ФИГ. 7 и иллюстрирующий перекрывающиеся полосы градиента изображения участков изображения, напечатанных печатающей головкой;
[00019] на ФИГ. 9 представлен увеличенный вид части печатающей головки, показанный вдоль линии 9 по ФИГ. 8 и изображающий постепенно увеличивающиеся расстояния между каплями, которые могут выбрасываться активными соплами с формированием полосы градиента изображения;
[00020] на ФИГ. 10 представлен увеличенный вид части печатающей головки, изображающий постепенное уменьшение размеров капель, которые могут выбрасываться соплами с формированием полосы градиента изображения;
[00021] на ФИГ. 11 представлен схематический вид в разрезе соседних участков изображения с перекрывающимися полосами градиента изображения;
[00022] на ФИГ. 12 представлен вид сверху соседних участков изображения по ФИГ. 11, изображающий перекрывающиеся полосы градиента изображения;
[00023] на ФИГ. 13 представлен пример печатающей головки, выполняющей печать привязочной линии во время печати нового участка изображения;
[00024] на ФИГ. 14 представлен вид в разрезе, показанный вдоль линии 14 по ФИГ. 13 и иллюстрирующий печатающую головку, включающую в себя механизм для печати привязочной линии и один или более датчиков привязочной линии для обнаружения привязочной линии существующего участка изображения;
[00025] на ФИГ. 15 представлен увеличенный вид, показанный вдоль линии 15 по ФИГ. 14 и изображающий одно из сопел печатающей головки, выполняющей печать привязочной линии, когда оставшиеся сопла печатающей головки печатают участок изображения;
[00026] на ФИГ. 16 представлен увеличенный вид примера печатающей головки, имеющей датчик привязочной линии для обнаружения привязочной линии существующего участка изображения;
[00027] на ФИГ. 17 представлен вид сбоку примера робота, имеющего один или более широкополосных исполнительных механизмов, соединяющих печатающую головку с манипулятором робота;
[00028] на ФИГ. 18 представлен вид сбоку примера множества широкополосных исполнительных механизмов, соединяющих печатающую головку с манипулятором робота;
[00029] на ФИГ. 19 представлен вид сбоку печатающей головки после изменения ее положения широкополосными исполнительными механизмами с выравниванием по привязочной линии и переориентацией лицевой поверхности печатающей головки параллельно указанной поверхности;
[00030] на ФИГ. 20 представлен перспективный вид примера дельта-робота, имеющего множество широкополосных исполнительных механизмов, соединяющих печатающую головку с манипулятором робота;
[00031] на ФИГ. 21 представлена блок-схема, содержащая одну или более операций, которые могут быть включены в способ печати изображения на поверхности, при этом параллельные участки изображения каждые имеют одну или более полос градиента изображения вдоль боковых кромок участков изображения;
[00032] на ФИГ.22 представлена блок-схема, содержащая одну или более операций, которые могут быть включены в способ печати изображения на поверхности, при этом участки изображения имеют привязочную линию для выравнивания нового участка изображения с существующим участком изображения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[00033] На чертежах, представленных в целях иллюстрации различных вариантов реализации настоящего раскрытия, а именно, на ФИГ. 1 показана блок-схема примера системы 200 формирования изображений, которая может быть реализована для роботизированной (например, автоматической или полуавтоматической) печати изображения 400 (ФИГ. 2) на поверхности 102. Система 200 может включать в себя робота 202 (роботизированный механизм) и/или по меньшей мере один манипулятор (например, первый и второй манипулятор 210, 212). Печатающая головка 300 может быть установлена на манипуляторе (например, втором манипуляторе 212). В некоторых примерах, система 200 может включать в себя один или более широкополосных исполнительных механизмов 250, соединяющих печатающую головку 300 с концом 214 (ФИГ. 5) манипулятора. Как описано ниже, такие широкополосные исполнительные механизмы 250 могут обеспечивать точное и быстрое управление положением и ориентацией печатающей головки 300 во время печати участка 404 изображения.
[00034] Печатающая головка 300 может быть выполнена в виде струйной печатающей головки, имеющей множество сопел 308 или отверстий для выброса капель 330 (ФИГ. 10) чернил, краски или иных текучих сред или красителей на поверхность 102 с формированием изображения 400. Струйная печатающая головка 300 может быть выполнена в виде термографического струйного принтера, пьезоэлектрического принтера или принтера непрерывной печати. Однако печатающая головка 300 может быть выполнена в иных конфигурациях, таких как точечно-матричный принтер, или других конфигурациях принтера, обеспечивающих возможность печати изображения 400 на поверхности 102.
[00035] Система 200 формирования изображений может печатать участки 404 изображения на поверхности 102 вдоль ряда параллельных траекторий 350 растеризации (ФИГ. 7). Параллельные участки 404 изображения совместно могут формировать изображение 400. В одном примере печатающая головка 300 может печатать участок 404 изображения с перекрытием соседнего участка 404 изображения. В этом отношении печатающая головка 300 может быть выполнена с возможностью печати участка 404 изображения с полосой 418 градиента изображения по меньшей мере вдоль одной боковой кромки 416 (ФИГ. 6) участка 404 изображения. Полоса 418 градиента изображения одного участка 404 изображения может перекрывать полосу 418 градиента изображения соседнего участка 404 изображения. Интенсивность изображения в пределах полосы 418 градиента изображения может уменьшаться вдоль направления, поперечного направлению траектории 350 растеризации. Посредством перекрытия полос 418 градиента изображения соседних участков 404 изображения можно избежать появления промежутков в изображении 400. Согласно настоящему раскрытию интенсивность изображения в пределах перекрывающихся полос 418 градиента изображения может приводить к получению по существу однородного градиента изображения по всей ширине изображения 400 таким образом, что перекрытия могут быть визуально незаметными. В одном примере интенсивность изображения в пределах перекрывающихся полос 418 градиента изображения может быть по существу эквивалентна интенсивности изображения в пределах внутренней части 414 каждого участка 404 изображения.
[00036] Еще в одном примере системы 200 формирования изображений печатающая головка 300 может включать в себя механизм 320 для печати привязочной линии, который может печатать привязочную линию 322 во время печати участка 404 изображения. Например, привязочная линия 322 может быть напечатана вдоль боковой кромки 416 участка 404 изображения. Печатающая головка 300 может включать в себя датчик 326 привязочной линии, выполненный с возможностью определения и/или обнаружения привязочной линии 322 существующего участка 408 изображения и передачи роботу 202 сигнала, указывающего на ошибку следования по траектории и заставляющего манипулятор робота (ФИГ. 5) или широкополосные исполнительные механизмы 250 (см. ФИГ. 17-20) корректировать или регулировать печатающую головку 300 (например, в режиме реального времени) таким образом, что боковая кромка 416 нового участка 406 изображения остается выровненной с боковой кромкой 416 существующего участка 408 изображения во время печати нового участка 406 изображения. Таким образом, привязочная линия 322 может обеспечивать для печатающей головки 300 возможность точного следования траектории 350 растеризации предварительно напечатанного участка 404 изображения так, что боковые кромки 416 нового и существующего участков 406, 408 изображения (ФИГ. 7) выровнены без промежутков и/или без перекрытия друг с другом, благодаря чему удается избежать появления промежутков между соседними участками 404 изображения, которые в противном случае могут отрицательно сказаться на качестве изображения 400.
[00037] На ФИГ. 2 представлен перспективный вид воздушного летательного аппарата 100 и портальной системы, которая может быть реализована для поддержки одной или более систем 200 формирования изображений, как раскрыто в настоящем документе. Воздушный летательный аппарат 100 может иметь фюзеляж 104, имеющий носовую часть 106 в переднем конце и хвостовое оперение 108 в кормовом конце фюзеляжа 104. Верхняя часть фюзеляжа 104 может быть описана как верхний полусвод фюзеляжа, а нижняя часть фюзеляжа 104 может быть описана как киль. Воздушный летательный аппарат 100 может включать в себя пару крыльев 114, проходящих наружу от фюзеляжа 104. К воздушному летательному аппарату 100, например к крыльям 114, могут быть прикреплены один или более блоков силовой установки. Хвостовое оперение 108 может включать в себя горизонтальное оперение 110 и вертикальное оперение 112.
[00038] Согласно ФИГ. 2, портальная система может быть размещена в ангаре 120 и может включать в себя множество порталов 124, размещенных с одной или более сторон воздушного летательного аппарата 100. Каждый портал из порталов 124 может включать в себя пару вертикальных стоек 126, которые могут быть выполнены с возможностью перемещения посредством электромеханического основания 128 вдоль системы 130 направляющих в полу, которая может быть соединена с полом 122 или встроена в него. Каждый портал 124 может включать в себя траверсу 132, проходящую между стойками 126. Траверса 132 каждого портала 124 может включать в себя платформу 134 для персонала. Кроме того, траверса 132 может поддерживать по меньшей мере одного робота 202, который может быть выполнен с возможностью перемещения вдоль траверсы 132. В преимущественном варианте реализации портальная система может обеспечивать средства для размещения робота 202 таким образом, что печатающая головка 300 имеет доступ к верхнему полусводу (crown) фюзеляжа, килю (keel) и другим внешним поверхностям 102 воздушного летательного аппарата 100, включая стороны фюзеляжа 104, вертикальное оперение 112, блоки силовой установки и другие поверхности 102.
[00039] Хотя система 200 и способ согласно настоящему раскрытию описаны в контексте печати изображений на воздушном летательном аппарате 100, система 200 и способ могут быть реализованы для печати изображений на поверхности любого типа, без ограничения. В этом отношении поверхность 102 может быть поверхностью автомобиля, включая тягач с прицепом, здания, плаката или любой другой подвижной или неподвижной конструкции, объекта, предмета или материала, имеющих поверхность, на которую необходимо нанести изображение. Поверхность может быть плоской, иметь простую криволинейность и/или сложную криволинейность.
[00040] На ФИГ. 3 представлен портал 124, размещенный возле вертикального оперения 112. Робот 202, закрепленный на траверсе, может поддерживать систему 200 формирования изображений для печати изображения 400 на вертикальном оперении 112. Изображение 400 на ФИГ. 3 показано в виде флага, который может быть напечатан на вертикальном оперении 112, например, с использованием чернил из струйной печатающей головки 300. Тем не менее, печатающая головка 300 может быть выполнена с возможностью нанесения изображений с использованием других текучих сред, включая, без ограничения, краску, пигмент и/или другие красители, и/или текучие среды. Кроме того, система 200 формирования изображений, раскрытая в настоящем документе, не ограничена формированием графических изображений.
[00041] В настоящем документе термин "изображение" включает в себя покрытие любого типа, которое может быть нанесено на поверхность 102 (ФИГ. 2). Изображение может иметь геометрический рисунок, любое количество цветов, включая один цвет, и/или может быть нанесено с сочетанием (сочетаниями) покрытий любого типа. В одном примере изображение 400 может включать в себя графический рисунок, логотип, буквы, символы и/или знаки любых других типов. В этом отношении изображение 400 может включать в себя ливрею 402 воздушного летательного аппарата, которая может содержать геометрический рисунок или узор, который может быть нанесен на внешние поверхности 102 воздушного летательного аппарата 100, как описано выше. Изображение 400 может включать в себя репродукцию фотографии. Кроме того, изображение 400 может представлять собой однотонное покрытие краской, чернилами или другими красителями или текучими средами и не ограничивается графическим рисунком, логотипом или буквами или другими знаками.
[00042] На ФИГ. 4 представлен вид с конца воздушного летательного аппарата 100, показывающий системы 200 формирования изображений, размещенные с противоположных сторон воздушного летательного аппарата 100. Каждая система 200 формирования изображений может включать в себя робота 202, имеющего один или более манипуляторов, и печатающую головку 300, соединенную с крайним концом 214 (ФИГ. 4) манипулятора робота 202. Одна из систем 200 формирования изображений показана при выполнении печати изображения 400 (например, флага) на вертикальном оперении 112. Другая система 200 формирования изображений показана при выполнении печати изображения 400, такого как геометрический рисунок ливреи 402 воздушного летательного аппарата (например, см. ФИГ. 2) на стороне фюзеляжа 104.
[00043] Хотя робот 202 системы 200 формирования изображений описан как установленный на портале 124 с поддержкой на траверсе 132, подвешенной между парой стоек 126 (ФИГ. 1-5), робот 202 может поддерживаться любым образом, без ограничения. Например, робот 202 может быть подвешен к порталу 124 верхнего расположения (не показано). В альтернативном варианте реализации изобретения робот 202 может быть установлен на подвижной платформе другого типа. Дополнительно робот 202 может быть выполнен неподвижным или опираться неподвижно на пол цеха (не показано) или другой постоянный признак.
[00044] На ФИГ. 5 представлен перспективный вид робота 202, установленного на траверсе 132 портала 124 и имеющего печатающую головку 300, установленную на манипуляторе робота 202. Робот 202 может быть выполнен с возможностью перемещения вдоль направляющих 206, проходящих вдоль длины траверсы 132. В показанном примере робот 202 может включать в себя основание 204 робота, первый манипулятор 210 и второй манипулятор 212 с печатающей головкой 300, установленной на конце 214 второго манипулятора 212. Основание 204 робота может обеспечивать возможность поворота основания 204 робота вокруг первой оси 216 относительно траверсы 132. Первый манипулятор 210 может быть выполнен с возможностью поворота вокруг второй оси 218, заданной шарниром, соединяющим первый манипулятор 210 с основанием 204 робота. Второй манипулятор 212 может быть выполнен с возможностью поворота вокруг третьей оси 220, заданной шарниром, соединяющим второй манипулятор 212 с первым манипулятором 210. Кроме того, второй манипулятор 212 может быть выполнен с возможностью поворота вокруг четвертой оси 222, проходящей вдоль длины второго манипулятора 212. Второй манипулятор 212 может быть выполнен с возможностью продольных выдвижения и отвода и задает, таким образом, пятую ось 224 перемещения.
[00045] На ФИГ. 4, 5 печатающая головка 300 показана выполненной с возможностью поворота вокруг шестой оси 226, заданной шарниром, соединяющим печатающую головку 300 со вторым манипулятором 212. Основание 204 робота может включать в себя систему привода робота (не показано) для продвижения основания 204 робота вдоль длины траверсы 132 и задания седьмой оси 228 перемещения робота 202. Робот 202 может включать в себя контроллер 208 для управления работой основания 204, манипуляторов и/или печатающей головки 300. Хотя робот 202 показан имеющим первый манипулятор 210 и второй манипулятор 212, этот робот может включать в себя любое количество манипуляторов и шарниров для перемещения вокруг или вдоль любого количества осей, чтобы обеспечивать возможность печатающей головке 300 достигать любого места из различных мест и ориентаций относительно поверхности 102. В некоторых примерах робот 202 может быть выполнен без основания 204, и/или робот может содержать один манипулятор, с которым может быть соединена печатающая головка 300.
[00046] На ФИГ. 6 представлен вид сбоку системы 200 формирования изображений, выполняющей печать изображения 400 на вертикальном оперении 112. Первый манипулятор 210 и второй манипулятор 212 могут быть выполнены с возможностью перемещения относительно основания 204 робота 202 для размещения печатающей головки 300. Печатающая головка 300 выполнена с возможностью перемещения манипуляторами поверх поверхности 102 вдоль одной или более траекторий 350 растеризации для печати участка 404 изображения на поверхности 102. Печатающая головка 300 может быть перемещена вдоль параллельных траекторий 350 растеризации с формированием параллельных участков 404 изображения, которые совместно образуют изображение 400. Робот 202 может быть выполнен с возможностью сохранения ориентации лицевой поверхности 304 печатающей головки параллельно местному положению на поверхности 102 по мере перемещения печатающей головки 300 поверх поверхности 102.
[00047] На ФИГ. 7 представлен пример печатающей головки 300, перемещаемой по траектории 350 растеризации с формированием участка 404 изображения. Каждая из траекторий 350 растеризации показана прямой, если смотреть сверху вдоль направления, проходящего по нормали к поверхности 102. Однако печатающая головка 300 может быть перемещена по траектории 350 растеризации, которая является криволинейной или комбинации криволинейной и прямой траекторий. Печатающая головка 300 может последовательно печатать множество параллельных участков 404 изображения, расположенных сторона к стороне, чтобы совместно формировать изображение 400 на поверхности 102.
[00048] На ФИГ. 8 представлен вид в разрезе печатающей головки 300, выполняющей печать участков 404 изображения на поверхности 102. Ширина 302 печатающей головки может быть ориентирована параллельно направлению 354 (ФИГ. 13), поперечному траектории 350 растеризации. Печатающая головка 300 может включать в себя множество сопел 308 или отверстий, распределенных между противоположными выполненными в направлении ширины концами 306 печатающей головки 300. Например, струйная печатающая головка может включать в себя тысячи отверстий. Печатающая головка 300 может выбрасывать капли 330 (ФИГ. 10) чернил, краски или других текучих сред из отверстий с формированием покрытия, имеющего толщину 336 покрытия на поверхности 102.
[00049] Каждый участок 404 изображения (ФИГ. 8) может иметь противоположные боковые кромки 416, задающие ширину 410 полосы участка 404 изображения. Печатающая головка 300 может быть выполнена с возможностью печати участка 404 изображения с полосой 418 градиента изображения по меньшей мере вдоль одной из боковых кромок 416. В показанном примере участок 404 изображения может содержать внутреннюю часть 414, ограниченную с противоположных сторон полосой 418 градиента изображения. Полоса 418 градиента изображения может быть описана как полоса, в пределах которой изменяется (например, уменьшается) интенсивность цвета участка 404 изображения вдоль поперечного направления 354 относительно направления траектории 350 растеризации от внутренней границы 420 полосы 418 градиента изображения к боковой кромке 416. Например, внутренняя часть 414 участка 404 изображения может быть черного цвета. В пределах полосы градиента изображения цвет может постепенно изменяться от черного на внутренней границе 420 (например, относительно высокой интенсивности) до белого (например, относительно низкой интенсивности) на боковой кромке 416 участка 404 изображения. Полоса 418 градиента изображения участка 404 изображения может быть шире, чем внутренняя часть 414 участка 404 изображения. Например, полоса 418 градиента изображения может составлять не более 30% ширины 410 полосы участка 404 изображения.
[00050] Печатающая головка 300 может быть перемещена вдоль траекторий 350 растеризации таким образом, что полосы 418 градиента изображения участков 404 изображения перекрываются. В предпочтительных вариантах реализации изобретения перекрывающиеся траектории 350 растеризации учитывают промежутки и перекрытия, представляющие отклонения от номинального расстояния между соседними участками 404 изображения, что приводит к уменьшению вероятности визуального различения таких отклонений от номинального расстояния между участками изображения. В этом отношении полосы 418 градиента изображения на боковых кромках 416 соседних участков 404 изображения, при наложении, приводят к незаметности края изображений даже при несовершенном отслеживании роботом 202 вдоль траекторий 350 растеризации. Таким образом, полосы 418 градиента изображения обеспечивают возможность печати сложных, замысловатых и многоцветных изображений множеством выполняемых за один проход участков 404 изображения на большой поверхности 102 с использованием крупных устройств на основе растеризации, таких как робот 202, показанный на ФИГ. 1-5.
[00051] На ФИГ. 9 представлен увеличенный вид печатающей головки 300, изображающий один пример формирования полосы 418 градиента изображения. Как отмечено выше, уменьшение интенсивности полосы 418 градиента изображения может быть получено путем уменьшения или сужения к одному концу толщины 336 покрытия вдоль поперечного направления 354 (ФИГ. 13) от внутренней границы 420 полосы 418 градиента изображения к боковой кромке 416 участка 404 изображения. Расстояние 332 между каплями может быть постоянным внутри внутренней части 414 участка 404 изображения. На ФИГ. 9 толщина 336 покрытия в пределах полосы 418 градиента изображения может быть сужена к одному концу путем постепенного увеличения расстояния 332 между каплями 330, выбрасываемыми соплами 308. В этом отношении некоторые из сопел 308 (например, отверстий) печатающей головки 300 в области, в которой необходимо напечатать полосу 418 градиента изображения, могут быть выключены электронно и могут называться неактивными соплами 312, и только активные сопла 310 в пределах полосы 418 градиента изображения могут выбрасывать капли 330 с формированием полосы 418 градиента изображения. В других примерах печатающая головка 300 может быть выполнена с постепенно увеличивающимися промежутками между соплами 308 для области, в которой необходимо напечатать полосу 418 градиента изображения.
[00052] На ФИГ. 10 представлен увеличенный вид, показывающий еще один пример печатающей головки 300, формирующей полосу 418 градиента изображения посредством поддержания сопел 308 в виде активных сопел 310, обеспечивающих получение равномерного расстояния между каплями и постепенное уменьшение размеров 334 капель в области, в которой должна быть сформирована полоса 418 градиента изображения. В следующих дополнительных примерах и полоса 418 градиента изображения может быть сформирована посредством комбинации управления расстоянием 332 между каплями и управления размером капель 334. Тем не менее, для формирования полосы 418 градиента изображения могут быть применены другие технологии, которые не ограничены примерами, показанными на фигурах чертежей и описанными выше. Печатающая головка 300 может быть выполнена с возможностью формирования полосы 418 градиента изображения с градиентом изображения, который линейно уменьшается. В альтернативных вариантах реализации изобретения градиент изображения в пределах полосы 418 градиента изображения может быть нелинейным.
[00053] На ФИГ. 11 представлен схематический вид в разрезе соседних участков 404 изображения с перекрывающимися полосами 418 градиента изображения. Показана толщина 336 покрытия (ФИГ. 10) в полосе 418 градиента изображения и во внутренней части 414 каждого участка 404 изображения. На ФИГ. 12 представлен вид сверху участков 404 изображения по ФИГ. 11, изображающий перекрывающиеся полосы 418 градиента изображения и параллельные траектории 350 растеризации участков 404 изображения. Как показано на чертежах, в системе 200 манипулятор (ФИГ. 7) может перемещать печатающую головку 300 для печати нового участка 406 изображения параллельно существующему участку 408 изображения (например, ранее напечатанному участку 404 изображения) таким образом, что полоса 418 градиента изображения нового участка 406 изображения (ФИГ. 8) перекрывает полосу 418 градиента изображения существующего участка 408 изображения. В этом отношении, боковая кромка 416 каждого участка 404 изображения может быть выровнена с внутренней границей 420 перекрывающей или перекрытой полосы 418 градиента изображения. Однако в непоказанном примере печатающая головка 300 может печатать участки 404 изображения так, чтобы формировать промежуток между боковой кромкой 416 полосы 418 градиента изображения нового участка 406 изображения и существующего участка 408 изображения. Как отмечено выше, печатающая головка 300 может печатать полосу 418 градиента изображения нового участка 406 изображения и существующего участка 408 изображения таким образом, что перекрытие имеет интенсивность изображения, эквивалентную интенсивности изображения внутренней части 414 нового участка 406 изображения и/или существующего участка 408 изображения.
[00054] В дополнительных непоказанных примерах печатающая головка 300 (ФИГ. 10) может формировать конец градиента изображения по меньшей мере на одном из противоположных концов участка 404 изображения. Конец градиента изображения может иметь интенсивность изображения, которая может уменьшаться по направлению к конечной кромке (не показано) участка 404 изображения. Такой конец градиента изображения может обеспечивать средства для плавного перехода (например, растушевки) участка 404 изображения со смешиванием с цветом и рисунком существующих цвета и рисунка области поверхности 102, окружающей свеженанесенное изображение 400. Например, система может наносить свеженанесенное изображение 400 на часть поверхности, которая может быть подвергнута повторной обработке, такой как удаление и/или перемещение части составной панели наружной обшивки (не показано) и/или расположенной ниже конструкции. Концы градиента изображения свеженанесенных участков 404 изображения могут обеспечивать средства для плавного перехода со смешиванием с окружающей поверхностью 102. Конец градиента изображения может также облегчать этот плавный переход на новом участке 406 изображения со смешиванием с концом градиента другого изображения 400, расположенного на конце траектории 350 растеризации нового участка 406 изображения.
[00055] Со ссылкой на ФИГ. 13 представлен пример печатающей головки 300, установленной на конце 214 манипулятора робота и выполненной с возможностью перемещения манипулятором поверх поверхности 102 по траектории 350 растеризации во время печати нового участка 406 изображения возле существующего участка 408 изображения. Печатающая головка 300 может включать в себя механизм 320 для печати привязочной линии, выполненный с возможностью печати привязочной линии 322 во время печати нового участка 406 изображения. Привязочная линия 322 может обеспечивать средства для точного отслеживания печатающей головкой 300 траектории 350 растеризации существующего участка 408 изображения. Печатающая головка 300 может включать в себя датчик 326 привязочной линии, такой как система обнаружения изображений, для обнаружения привязочной линии 322 и обеспечения выдачи в контроллер 208 (ФИГ. 14) сигнала обратной связи об ошибке траектории, чтобы обеспечить роботу 202 возможность выработки корректировочных входных данных траектории и подачи их в печатающую головку 300 таким образом, что боковая кромка 416 нового участка 406 изображения остается выровненной с боковой кромкой 416 существующего участка 408 изображения.
[00056] На ФИГ. 14 представлен пример печатающей головки 300, выполняющей печать участка 404 изображения возле существующего участка 408 изображения. Существующий участок 408 изображения может включать в себя привязочную линию 322 вдоль одной из боковых кромок 416. Печатающая головка 300 может иметь один или более датчиков 326 привязочной линии, установленных на каждом из выполненных в направлении ширины концов 306 печатающей головки 300. Один из датчиков 326 привязочной линии может быть выполнен с возможностью обнаружения привязочной линии 322 существующего участка 408 изображения. Кроме того, печатающая головка 300 может включать в себя один или более датчиков 314 положения для отслеживания положения и/или ориентации печатающей головки 300 относительно поверхности 102. В некоторых примерах датчик привязочных линий 322 может быть выполнен в виде датчиков 314 положения для обнаружения положения и/или ориентации печатающей головки 300 в дополнение к обнаружению привязочной линии 322.
[00057] Датчики 314 положения на одном или обоих из выполненных в направлении ширины концов 306 печатающей головки 300 могут измерять проходящее по нормали расстояние 338 печатающей головки 300 от поверхности 102 вдоль направления, проходящего в данном месте по нормали к поверхности 102. Сигнал обратной связи, выдаваемый датчиками 314 положения в контроллер 208, может обеспечивать для контроллера 208 возможность регулировки положения манипулятора таким образом, что лицевая поверхность печатающей головки 300 удерживается на необходимом проходящем по нормали расстоянии 338 от поверхности 102 так, что капли могут быть точно размещены на поверхности 102. Еще в одних примерах контроллер 208 может использовать непрерывный или полунепрерывный сигнал обратной связи от датчиков 314 положения для поворота печатающей головки 300 по мере необходимости вдоль качательного направления 358 таким образом, что лицевая поверхность печатающей головки 300 удерживается параллельно поверхности 102 по мере перемещения печатающей головки 300 поверх поверхности 102, которая может иметь изменяющийся и/или криволинейный контур.
[00058] На ФИГ. 15 представлен пример печатающей головки 300, в которой механизм 320 для печати привязочной линии содержит одно или более специально предназначенных для этого сопел 308, выполненных с возможностью печати привязочной линии 322 по меньшей мере на одной из противоположных боковых кромок 416 нового участка 406 изображения. Оставшиеся сопла 308 печатающей головки 300 могут быть выполнены с возможностью печати участка 404 изображения. В других непоказанных примерах механизм 320 для печати привязочной линии может содержать специально предназначенное для этого устройство для печати линии, которое может быть установлено на печатающей головке 300 и печатать привязочную линию 322, когда сопла 308 печатающей головки 300 печатают участок 404 изображения.
[00059] Печатающая головка 300 может печатать привязочную линию 322, которая может быть видимой в пределах определенного диапазона, такого как диапазон видимого света и/или инфракрасный диапазон. В некоторых примерах привязочная линия 322 может иметь толщину, которую невозможно обнаружить человеческим глазом дальше определенного расстояния (например, более 10 футов (3 м)) от поверхности 102. В других примерах привязочная линия 322 может быть напечатана в виде серии размещенных на определенном расстоянии точек (например, каждые 0,01 дюйма (0,254 мм)), которые могут быть визуально незаметны дальше определенного расстояния, чтобы не вызывать отрицательного влияния на качество изображения. Еще в одних примерах цвет привязочной линии 322 может быть незаметен относительно цвета в месте изображения 400, или привязочная линия 322 может быть невидимой в условиях нормального рассеянного освещения (например, света в цеху или солнечного света) и может быть флюоресцирующей при люминесцентном излучении, который может излучаться датчиком 326 привязочной линии. Кроме того, привязочная линия 322 может быть невидимой в диапазоне видимого света, или привязочная линия 322 может изначально быть видимой при рассеянном освещении и со временем может исчезать в условиях окружающей среды, например, вследствие воздействия на нее ультрафиолетовым излучением.
[00060] Еще в одних примерах привязочная линия 322 может быть напечатана по меньшей мере с одним кодировочным узором 324 (например, см. ФИГ. 13) по меньшей мере вдоль части привязочной линии 322. Кодировочный узор 324 может содержать систему отрезков прямой или черточек, разделенных промежутками. Кодировочный узор 324 может предоставлять информацию об участке 404 изображения. Например, кодировочный узор 324 может предоставлять информацию, касающуюся расстояния от текущего местоположения (например, места, в котором в настоящий момент обнаружен кодировочный узор 324) печатающей головки 300 относительно конца 412 участка 404 изображения. Такая информация может быть включена в сигнал, переданный в контроллер 208, чтобы обеспечить для контроллера 208 возможность управления работой печатающей головки 300. Например, кодировочный узор 324 может подавать сигнал в контроллер 208 для синхронизации или выравнивания нового печатающегося участка 406 изображения с существующим участком 408 изображения, или подавать сигнал в контроллер 208 о прекращении выбрасывания капель 330 в соответствии с концом существующего участка 408 изображения.
[00061] На ФИГ. 16 представлен увеличенный вид примера печатающей головки 300, имеющей датчик 326 привязочной линии для обнаружения привязочной линии 322 участка 404 изображения. Датчик 326 привязочной линии может передавать в контроллер 208 (ФИГ. 14) сигнал об ошибке следования по траектории, обозначающий расстояние 340 в боковом направлении между привязочной линией 322 и указательным признаком. Указательный признак может представлять собой осевую линию датчика 326 привязочной линии, опорную точку на печатающей головке 300, такую как сопло 308 на крайнем конце печатающей головки 300, или какой-либо другой указательный признак. Когда печатающая головка 300 перемещается по траектории 350 растеризации, датчик 326 привязочной линии может выполнять обнаружение и передавать (например, непрерывно, в режиме реального времени) в контроллер 208 сигнал об ошибке следования по траектории, обозначающий расстояние 340 в боковом направлении. На основании 204 сигнала контроллер 208 может вызывать регулировку бокового положения печатающей головки 300 (например, манипулятором) таким образом, что боковая кромка 416 нового участка 406 изображения остается выровненной с боковой кромкой 416 существующего участка 408 изображения.
[00062] Датчик 326 привязочной линии может быть выполнен в качестве оптического датчика видеосистемы. Как показано на ФИГ. 16, оптический датчик может испускать оптический луч 328 для обнаружения привязочной линии 322. Оптический датчик может генерировать сигнал, обозначающий боковое положение, в котором оптический луч 328 попадает на привязочную линию 322. Сигнал может быть передан в контроллер 208 робота 202 по требованию, через заранее запрограммированные интервалы времени, непрерывно или другим образом. В одном примере датчик 326 привязочной линии может обеспечивать выдачу в режиме реального времени контроллеру 208 робота 202 сигнала обратной связи о выравнивании для управления или регулировки печатающей головки 300 таким образом, что боковые кромки 416 нового участка 406 изображения и существующего участка 408 изображения выровнены. Например, робот 202 может регулировать боковое положение печатающей головки 300 таким образом, что боковые кромки 416 нового участка 406 изображения и существующего участка 408 изображения выровнены без промежутков и/или без перекрытия во время печати нового участка 406 изображения.
[00063] В других примерах вместо регулировки бокового положения печатающей головки 300, контроллер 208 робота может сохранять боковое положение печатающей головки 300 во время перемещения по траектории 350 растеризации, и контроллер 208 может электронно управлять соплами 308 на печатающей головке 300, которые активно выбрасывают капли 330, или сдвигать сопла 308. В этом отношении печатающая головка 300 может иметь дополнительные (например, неиспользуемые) сопла 308, размещенные на одном или обоих из выполненных в направлении ширины концов 306 печатающей головки 300. После определения контроллером 208 того, что новый участок 406 изображения не выровнен с существующим участком 408 изображения, контроллер 208 может активировать одно или более неиспользуемых сопел 308 на одном из выполненных в направлении ширины концов 306 и выключить такое же количество сопел 308 на противоположном в направлении ширины конце 306 печатающей головки 300 для сохранения одинаковой ширины нового участка 406 изображения при эффективном сдвиге бокового положения нового участка 406 изображения без бокового перемещения печатающей головки 300. В этом отношении участок 404 изображения может быть сдвинут электронно в режиме реального времени или почти в режиме реального времени таким образом, что боковая кромка 416 нового участка 406 изображения удерживается без промежутков и/или без перекрытия с боковой кромкой 416 существующего участка 408 изображения. Таким образом, привязочная линия 322 предпочтительно обеспечивает средства точного сохранения печатающей головкой 300 номинального расстояния нового участка 406 изображения относительно траектории 350 растеризации существующего или ранее нанесенного участка 404 изображения и позволяет благодаря этому избежать промежутков между участками 404 изображения.
[00064] На ФИГ. 17 представлен вид примера робота 202, имеющего широкополосные исполнительные механизмы 250, соединяющие печатающую головку 300 с манипулятором робота 202 и изображающий печатающую головку 300, выполняющую печать изображения 400 (например, ливрею 402 воздушного летательного аппарата) на поверхности 102 фюзеляжа 104. Как отмечено выше, для печати на больших поверхностях 102 может быть необходим относительно крупный робот 202. Такой крупный робот 202 может обладать относительно большой массой и относительно низкой жесткостью, что может привести к появлению на конце 214 манипулятора (например, последней оси робота), на котором может быть установлена печатающая головка 300, полосы перемещения с большими в силу своей природы допусками. Чтобы попытаться компенсировать такие большие в силу своей природы допуски, крупному роботу 202 может потребоваться сложное компьютерное программирование (например, программирование на основе ЧПУ или числового программного управления), что может дополнительно увеличить затраты на производство и продолжительность. В преимущественном варианте реализации изобретения, посредством печати участков 404 изображения с помощью описанных выше полос 418 градиента изображения (ФИГ. 7-12) и/или привязочных линий 322 (ФИГ. 13-16), печатающая головка 300, установленная на роботе, согласно настоящему раскрытию может печатать высококачественное изображение 400 на поверхности 102 без промежутков между соседними участками 404 изображения, которые в противном случае отрицательно скажутся на общем качестве изображения.
[00065] Как показано на ФИГ. 17, один или более широкополосных исполнительных механизмов 250 могут быть установлены последовательно с одним или более манипуляторами робота 202. Такие широкополосные исполнительные механизмы 250 могут соединять печатающую головку 300 с последней осью или манипулятором робота 202 и обеспечивать полосу относительно малых допусков для регулировки ориентации и/или положения печатающей головки 300 относительно поверхности 102 во время перемещения печатающей головки 300 по траектории 350 растеризации таким образом, что новый участок 406 изображения может быть точно выровнен с существующим участком 408 изображения. Широкополосные исполнительные механизмы 250 могут быть описаны как "широкополосные" (high-bandwidth) в том смысле, что эти исполнительные механизмы 250 могут иметь небольшую массу и внутренне присущую им высокую жесткость, что может обусловливать повышенные точности и скорости реагирования при размещении и ориентировании печатающей головки 300 по сравнению с большой массой, низкой жесткостью и, соответственно, медленным реагированием крупного робота 202. Кроме того, в этом отношении широкополосные исполнительные механизмы 250 могут быстро реагировать на команды от контроллера 208 робота на основании сигнала об ошибке следования по траектории, подаваемого в режиме реального времени датчиком 326 привязочной линии.
[00066] Как показано на ФИГ. 17, система 200 может включать в себя один или более широкополосных исполнительных механизмов 250, которые могут быть выполнены с возможностью регулировки положения печатающей головки 300 по меньшей мере вдоль одного из следующих направлений: (1) поперечное направление 354 поступательного перемещения печатающей головки 300, параллельное поверхности 102 и перпендикулярное траектории 350 растеризации, (2) нормальное направление 356 поступательного перемещения печатающей головки 300, проходящее в данном месте по нормали к поверхности 102, и (3) качательное направление 358 поворота печатающей головки 300 вокруг оси, параллельной траектории 350 растеризации. Кроме того, один или более широкополосных исполнительных механизмов 250 могут быть выполнены с возможностью регулировки положения печатающей головки 300 вдоль других направлений, включая, помимо прочего, параллельное направление 352 поступательного перемещения, которое может быть описано как параллельное основному направлению перемещения печатающей головки 300 по траектории 350 растеризации во время печати участка 404 изображения.
[00067] На ФИГ. 18 показан пример трех (3) широкополосных исполнительных механизмов 250, соединяющих печатающую головку 300 с манипулятором робота 202 (ФИГ. 17). В одном варианте реализации изобретения широкополосные исполнительные механизмы 250 включают в себя первый исполнительный механизм 250a, второй исполнительный механизм 250b и третий исполнительный механизм 250c, которые могут быть в целом выровнены в конфигурации треноги с опорами в одной плоскости, обеспечивающей возможность регулировки печатающей головки 300 вдоль поперечного направления 354, нормального направления 356 и качательного направления 358, как описано выше. Первый, второй и третий исполнительные механизмы 250a, 250b, 250c каждый могут иметь верхний конец 268 и нижний конец 270. Верхние концы 268 первого, второго и третьего исполнительных механизмов 250a, 250b, 250c могут быть соединены с возможностью поворота с концом манипулятора робота и могут иметь параллельные оси поворота. Нижние концы 270 первого, второго и третьего исполнительных механизмов 250a, 250b, 250c могут быть соединены с возможностью поворота с печатающей головкой 300 и также могут иметь параллельные оси поворота. Как показано на ФИГ. 18, верхние концы 268 первого 250a и третьего исполнительных механизмов 250c размещены на расстоянии друг от друга в местах шарнирного прикрепления к концу манипулятора 214, а нижние концы 270 первого 250a и третьего исполнительных механизмов 250c размещены на расстоянии друг от друга в местах шарнирного прикрепления к печатающей головке 300. В этом отношении первый исполнительный механизм 250a и третий исполнительный механизм 250c могут быть ориентированы в целом параллельно друг другу. Тем не менее, первый исполнительный механизм 250а и третий исполнительный механизм 250 с могут быть ориентированы непараллельно друг другу без отрицательного влияния на возможность перемещения печатающей головки 300 вдоль поперечного направления 354, нормального направления 356 и качательного направления 358.
[00068] Как показано на ФИГ. 18, верхний конец 268 второго исполнительного механизма 250b может быть размещен возле верхнего конца 268 первого исполнительного механизма 250a. Нижний конец 270 второго исполнительного механизма 250b может быть размещен возле нижнего конца 270 третьего исполнительного механизма 250c таким образом, что второй исполнительный механизм 250b проходит по диагонали между верхним концом 268 первого исполнительного механизма 250a и нижним концом 270 третьего исполнительного механизма 250с. При работе первый, второй и третий исполнительные механизмы 250a, 250b, 250c могут быть выдвинуты и отведены на различную величину для регулировки печатающей головки 300 вдоль поперечного направления 354, нормального направления 356 и качательного направления 358. В одном из примеров, раскрытых в настоящем документе, один или более из широкополосных исполнительных механизмов 250 могут быть выполнены в качестве пневматических цилиндров или в других конфигурациях широкополосных исполнительных механизмов, включая, помимо прочего, гидравлические цилиндры, электромеханические исполнительные механизмы или другие конфигурации исполнительных механизмов. Как показано на ФИГ. 18, лицевая поверхность 304 печатающей головки ориентирована непараллельно поверхности 102 и смещена в сторону относительно привязочной линии 322.
[00069] На ФИГ. 19 представлен вид сбоку печатающей головки 300 после изменения ее положения широкополосными исполнительными механизмами 250 (например, первым, вторым и третьим исполнительными механизмами 250a, 250b, 250c) с выравниванием с привязочной линией 322 и переориентацией лицевой поверхности 304 печатающей головки параллельно поверхности 102. В этом отношении контроллер 208 (ФИГ. 14) может выдавать команды на поступательное перемещение и переориентацию печатающей головки 300 на основании непрерывных входных сигналов, которые могут быть получены в режиме реального времени от датчиков 314 положения и/или датчиков 326 привязочной линии, отслеживающих привязочную линию 322 во время печати нового участка 406 изображения. Например, широкополосные исполнительные механизмы 250 могут выполнять поступательное перемещение печатающей головки 300 вдоль поперечного направления 354 и нормального направления 356 и могут поворачивать печатающую головку 300 вдоль качательного направления 358 для ориентирования лицевой поверхности 304 печатающей головки параллельно местной поверхности 102 при выравнивании боковой кромки 416 нового участка 406 изображения с боковой кромкой 416 существующего участка 408 изображения.
[00070] На ФИГ. 20 представлен еще один пример широкополосных исполнительных механизмов 250, выполненных в качестве дельта-робота 252 и установленных последовательно с манипулятором робота и соединяющих печатающую головку 300 с концом 214 (ФИГ. 19) манипулятора робота (ФИГ. 17). Как показано на ФИГ. 20, дельта-робот 252 может включать в себя основание 254 исполнительного механизма, который может быть прикреплен к концу 214 манипулятора робота (например, второго манипулятора 212). Три (3) верхних манипулятора 256 исполнительного механизма могут быть соединены с возможностью поворота с основанием 254 исполнительного механизма и могут иметь лежащие в одной плоскости оси поворота, ориентированные под углом 60 градусов относительно друг друга. Каждый верхний манипулятор 256 исполнительного механизма может быть соединен шарнирным соединением 260 с парой нижних манипуляторов 258 исполнительного механизма. Каждая пара нижних манипуляторов 258 исполнительного механизма может быть выполнена в качестве параллелограммного четырехзвенного механизма. Каждая пара из трех (3) пар нижних манипуляторов 258 может быть соединена с возможностью поворота с платформой 262 исполнительного механизма шестью (6) шарнирными соединениями, причем каждое шарнирное соединение выполнено с возможностью поворота вокруг одной оси. Три (3) параллелограммных четырехзвенных механизма трех (3) нижних манипуляторов 258 исполнительного механизма ограничивают перемещение платформы 262 исполнительного механизма поступательным перемещением (например, перемещением в направлении x-y) и выдвижением (например, перемещением в направлении z) и предотвращают поворот платформы 262 исполнительного механизма. В этом отношении платформа 262 исполнительного механизма удерживается параллельно с основанием 254 исполнительного механизма не зависимо от направления поступательного перемещения и/или выдвижения платформы 262 исполнительного механизма. В непоказанном примере дельта-робот 252 может быть снабжен шаровыми шарнирами (не показано) и верхними и нижними манипуляторами (не показано), размещенными таким образом, что платформа 262 исполнительного механизма поддерживается параллельно основанию 254 исполнительного механизма во время поступательного перемещения и/или выдвижения платформы 262 исполнительного механизма.
[00071] Как показано на ФИГ. 20, выполнение платформы 262 исполнительного механизма с возможностью поступательного перемещения обеспечивает поступательное перемещение печатающей головки 300 вдоль описанного выше поперечного направления 354 (например, направления y) и нормального направления 356 (например, направления z) относительно поверхности 102, на которой осуществляется печать. Конструкция широкополосного исполнительного механизма 250 по ФИГ. 20 может обеспечивать возможность поворота печатающей головки 300 вдоль качательного направления 358 с помощью одного или более роликовых исполнительных механизмов 264 для поворота печатающей головки 300 вокруг одного или более крепежных рычагов 266. Верхние концы крепежных рычагов 266 могут быть жестко соединены с платформой 262 исполнительного механизма. Нижние концы крепежных рычагов 266 могут быть соединены с возможностью поворота с печатающей головкой 300. Конструкция широкополосного исполнительного механизма 250 по ФИГ. 20 может представлять систему исполнительных механизмов, имеющую небольшую массу и большую жесткость и обеспечивающую повышенную точность и улучшенное время реагирования для регулировки положения печатающей головки 300 согласно сигналу об ошибке следования по траектории, который может быть принят с использованием датчика 326 привязочной линии, отслеживающего привязочную линию 322 существующего участка 408 изображения. Как отмечено выше, широкополосные исполнительные механизмы 250 могут регулировать положение и/или ориентацию печатающей головки 300 с точностью, которой невозможно добиться одним работающим роботом 202.
[00072] На ФИГ. 21 представлена блок-схема одной или более операций, которые могут быть включены в способ 500 печати изображения 400 на поверхности 102. Способ может быть реализован с использованием системы 200, описанной выше. Этап 502 способа 500 может включать в себя размещение манипулятора робота 202 возле поверхности 102. Как отмечено выше, печатающая головка 300 может быть установлена на конце 214 манипулятора. В некоторых примерах, печатающая головка 300 может быть струйной печатающей головкой 300, имеющей совокупность сопел 308 или отверстий для выброса капель 330 чернил, краски или других текучих сред или красителей.
[00073] Этап 504 способа 500 может включать в себя перемещение, с использованием манипулятора, печатающей головки 300 поверх поверхности 102 по траектории 350 растеризации, когда печатающая головка 300 печатает участок 404 изображения на поверхности 102, как показано на ФИГ. 7. Печатающая головка 300 может быть перемещена манипулятором по траектории 350 растеризации для печати нового участка 406 изображения параллельно существующему участку 408 изображения.
[00074] Этап 506 способа 500 может включать в себя печать полосы 418 градиента изображения по меньшей мере вдоль одной боковой кромки 416 участка 404 изображения во время печати участка 404 изображения на поверхности 102, как показано на ФИГ. 8. Как описано выше, полоса 418 градиента изображения может иметь интенсивность изображения, которая уменьшается вдоль поперечного направления 354 (например, относительно траектории 350 растеризации) к боковой кромке 416 участка 404 изображения. В некоторых примерах, градиент изображения полосы 418 градиента изображения может быть линейным (например, линейное уменьшение плотности изображения) вдоль поперечного направления 354. В других примерах градиент изображения полосы 418 градиента изображения может быть нелинейным.
[00075] Как показано на ФИГ. 8, печатающая головка 300 может печатать новый участок 406 изображения таким образом, что полоса 418 градиента изображения нового участка 406 изображения перекрывает полосу 418 градиента изображения существующего участка 408 изображения. Например, боковая кромка 416 нового участка 406 изображения может быть выровнена с внутренней границей 420 перекрывающей или перекрытой полосы градиента изображения, как упомянуто выше. Способ может включать в себя печать, с использованием печатающей головки 300, полосы 418 градиента изображения нового участка 406 изображения и существующего участка 408 изображения таким образом, что перекрывающиеся полосы 418 градиента изображения имеют общую интенсивность изображения, эквивалентную интенсивности изображения внутренней части 414 нового участка 406 изображения и/или существующего участка 408 изображения.
[00076] Как показано на ФИГ. 9 и упомянуто выше, полоса 418 градиента изображения может быть создана посредством выбрасывания капель 330 из сопел 308 печатающей головки 300 с постепенно увеличивающимися расстояниями 332 между каплями вдоль направления к боковой кромке 416 участка 404 изображения по сравнению с одинаковым расстоянием 332 между каплями для сопел 308, которые печатают внутреннюю часть 414 участка 404 изображения. Как показано на ФИГ. 10, полоса 418 градиента изображения также может быть создана посредством выбрасывания капель постепенно уменьшающихся размеров 334 вдоль направления к боковой кромке 416. Способ при необходимости может включать в себя формирование нового участка 406 изображения с концом градиента изображения (не показано) по меньшей мере на одном из противоположных концов нового участка 406 изображения в качестве средства для плавного перехода или растушевки участка 404 изображения со смешиванием с областью, граничащей с новым участком 406 изображения.
[00077] На ФИГ.22 представлена блок-схема еще одних операций, которые могут быть включены в еще один способ 600 печати изображения 400 на поверхности 102. Этап 602 способа 600 может включать в себя печать на поверхности 102, с использованием печатающей головки 300, установленной на манипуляторе робота 202, нового участка 406 изображения при перемещении печатающей головки 300 поверх поверхности 102 по траектории 350 растеризации. Этап 604 способа 600 может включать в себя печать привязочной линии 322 на поверхности 102 во время печати нового участка 406 изображения, как показано на ФИГ. 13 и описано выше. Печатающая головка 300 может включать в себя механизм 320 для печати привязочной линии, выполненный с возможностью печати привязочной линии 322 на поверхности 102 во время печати нового участка 406 изображения. В некоторых примерах, механизм 320 для печати привязочной линии может содержать по меньшей мере одно сопло 308 печатающей головки 300, которое может выбрасывать чернила или краску цвета, отличающегося от цвета чернил или краски, выбрасываемых соседними соплами 308. В других примерах механизм 320 для печати привязочной линии может содержать специально предназначенный для этого принтер привязочной линии (не показано).
[00078] Печатающая головка 300 может печатать привязочную линию 322 по меньшей мере на одной из противоположных боковых кромок 416 нового участка 406 изображения во время печати нового участка 406 изображения. Этап печати привязочной линии 322 может включать в себя печать привязочной линии 322 по меньшей мере с одним кодировочным узором 324 по меньшей мере вдоль части привязочной линии 322. Кодировочный узор 324 может содержать ряд отрезков прямой, разделенных промежутками. Кодировочный узор 324 может альтернативно или дополнительно содержать местные изменения цвета привязочной линии 322 или комбинацию отрезков прямой, промежутков, изменений цвета и других изменений привязочной линии для кодирования информации. Кодировочный узор 324 может представлять информацию, касающуюся участка 404 изображения, такую как расстояние до конца 412 участка 404 изображения или другую информацию об изображении 400. Информация может быть передана в контроллер 208, который может регулировать одну или более печатных операций, основанных на информации, содержащейся в кодировочном узоре 324.
[00079] Этап 606 способа 600 может включать в себя обнаружение, с использованием датчика 326 привязочной линии, содержащегося в печатающей головке 300, привязочной линии 322 существующего участка 408 изображения во время печати нового участка 406 изображения. Как отмечено выше, датчик 326 привязочной линии выполняет обнаружение привязочной линии 322 существующего участка 408 изображения и передает роботу 202 и/или в контроллер 208 сигнал, заставляющий манипулятор осуществлять регулировку печатающей головки 300 таким образом, что боковая кромка 416 нового участка 406 изображения выровнена с боковой кромкой 416 существующего участка 408 изображения и/или удерживается без промежутков и без перекрытия с боковой кромкой 416 существующего участка 408 изображения.
[00080] Этап 608 способа 600 может включать в себя регулировку бокового положения нового участка 406 изображения на основании обнаруженного положения привязочной линии 322 для выравнивания боковой кромки 416 нового участка 406 изображения с боковой кромкой 416 существующего участка 408 изображения. В одном примере способ может включать в себя обнаружение несовпадения боковой кромки 416 нового участка 406 изображения с боковой кромкой 416 существующего участка 408 изображения и обеспечение выдачи в режиме реального времени роботу 202 и/или в контроллер 208 сигнала обратной связи о выравнивании для управления или регулировки бокового положения печатающей головки 300 таким образом, что боковая кромка 416 нового участка 406 изображения выровнена с боковой кромкой 416 существующего участка 408 изображения. В этом отношении этап регулировки бокового положения нового участка 406 изображения может включать в себя передачу сигнала от датчика 326 привязочной линии (например, оптического датчика) роботу 202 и/или в контроллер 208. Робот 202 и/или контроллер 208 может определять корректировочные входные данные для робота на основании несовпадения печатающей головки 300.
[00081] Способ может включать в себя регулировку положения печатающей головки 300 таким образом, что боковая кромка 416 нового участка 406 изображения удерживается без промежутков и без перекрытия с боковой кромкой 416 существующего участка 408 изображения. В этом отношении боковое положение печатающей головки 300 может быть отрегулировано для выравнивания боковой кромки 416 нового участка 406 изображения с боковой кромкой 416 существующего участка 408 изображения. Альтернативно, способ может включать в себя электронный сдвиг сопел 308, которые активно выбрасывают капли 330 для выравнивания боковой кромки 416 нового участка 406 изображения с боковой кромкой 416 существующего участка 408 изображения, как упомянуто выше.
[00082] Регулировка положения и/или ориентации печатающей головки 300 может быть облегчена с использованием одного или более широкополосных исполнительных механизмов 250, соединяющих печатающую головку 300 с концом 214 манипулятора робота 202, как описано выше и проиллюстрировано на ФИГ. 17-20. Широкополосные исполнительные механизмы 250 могут регулировать ориентацию и/или положение печатающей головки 300 относительно поверхности 102 во время перемещения печатающей головки 300 по траектории 350 растеризации. Датчик 326 привязочной линии выполняет обнаружение привязочной линии 322 и передачу роботу 202 сигнала для определения регулировки бокового положения печатающей головки 300. Робот 202 и/или контроллер 208 может выдавать команды на широкополосные исполнительные механизмы 250 для регулировки положения печатающей головки 300 таким образом, что боковая кромка 416 нового участка 406 изображения удерживается без промежутков с боковой кромкой 416 существующего участка 408 изображения.
[00083] Способ может включать в себя регулировку печатающей головки 300 поступательным перемещением печатающей головки 300 вдоль поперечного направления 354 параллельно поверхности 102 и перпендикулярно траектории 350 растеризации, поступательное перемещение печатающей головки 300 вдоль нормального направления 356, проходящего по нормали к поверхности 102, и/или поворот печатающей головки 300 вдоль качательного направления 358 вокруг оси, параллельной траектории 350 растеризации. В предпочтительном варианте реализации изобретения широкополосные исполнительные механизмы 250 могут обеспечивать повышенную точность и ускоренное реагирование при регулировке положения и/или ориентации печатающей головки 300.
Кроме того, настоящее раскрытие содержит варианты реализации согласно следующим пунктам:
Пункт 1. Система для печати изображения на поверхности, содержащая:
робота, имеющего по меньшей мере один манипулятор;
печатающую головку, установленную на манипуляторе и выполненную с возможностью перемещения манипулятором поверх поверхности по траектории растеризации во время печати участка изображения на указанной поверхности; причем
печатающая головка выполнена с возможностью печати участка изображения с полосой градиента изображения по меньшей мере вдоль одной из противоположных боковых кромок полосы градиента изображения, а интенсивность изображения в пределах полосы градиента изображения уменьшается от внутренней части полосы градиента изображения к боковой кромке.
Пункт 2. Система по пункту 1, в которой:
манипулятор выполнен с возможностью перемещения печатающей головки параллельно существующему участку изображения таким образом, что полоса градиента изображения нового участка изображения перекрывает полосу градиента изображения существующего участка изображения.
Пункт 3. Система по пункту 2, в которой:
печатающая головка выполнена с возможностью печати полосы градиента изображения нового участка изображения и существующего участка изображения таким образом, что перекрытие полос градиента изображения имеет интенсивность изображения, эквивалентную интенсивности изображения внутренней части по меньшей мере одного из таких участков, как новый участок изображения и существующий участок изображения.
Пункт 4. Система по пункту 1, в которой:
печатающая головка включает в себя совокупность сопел, распределенных вдоль ширины печатающей головки; причем
печатающая головка выполнена с возможностью формирования полосы градиента изображения посредством выбрасывания капель по меньшей мере одним из следующих способов:
постепенное увеличение расстояния между каплями вдоль направления к боковой кромке и
постепенное уменьшение размера капли вдоль направления к боковой кромке.
Пункт 5. Система по пункту 1, в которой:
печатающая головка является струйной печатающей головкой.
Пункт 6. Система для печати изображения на поверхности, содержащая:
робота, имеющего по меньшей мере один манипулятор;
печатающую головку, установленную на манипуляторе и выполненную с возможностью перемещения манипулятором поверх поверхности по траектории растеризации во время печати нового участка изображения на указанной поверхности; механизм для печати привязочной линии, выполненный с возможностью печати привязочной линии на указанной поверхности во время печати нового участка изображения; и
датчик привязочной линии, выполненный с возможностью обнаружения привязочной линии существующего участка изображения и передачи роботу сигнала, заставляющего манипулятор осуществлять регулировку печатающей головки таким образом, что боковая кромка нового участка изображения выровнена с боковой кромкой существующего участка изображения.
Пункт 7. Система по пункту 6, в которой:
Механизм для печати привязочной линии содержит по меньшей мере одно сопло печатающей головки.
Пункт 8. Система по пункту 6, в которой:
робот выполнен с возможностью регулировки бокового положения печатающей головки таким образом, что боковая кромка нового участка изображения выровнена с боковой кромкой существующего участка изображения.
Пункт 9. Система по пункту 6, в которой:
робот выполнен с возможностью электронного сдвига групп сопел, активно выбрасывающих капли, таким образом, что боковая кромка нового участка изображения выровнена с боковой кромкой существующего участка изображения.
Пункт 10. Система по пункту 6, дополнительно включающая в себя:
по меньшей мере один широкополосный исполнительный механизм, соединяющий печатающую головку с концом манипулятора; и
широкополосный исполнительный механизм, выполненный с возможностью регулировки ориентации и/или положения печатающей головки относительно поверхности во время перемещения печатающей головки по траектории растеризации.
Пункт 11. Система по пункту 10, в которой:
широкополосный исполнительный механизм выполнен с возможностью регулировки печатающей головки по меньшей мере вдоль одного из следующих направлений:
поперечное направление поступательного перемещения параллельно поверхности и перпендикулярно траектории растеризации;
нормальное направление поступательного перемещения, проходящее по нормали к поверхности и
качательное направление поворота вокруг оси, параллельной траектории растеризации.
Пункт 12. Система по пункту 11, в которой:
широкополосный исполнительный механизм включает в себя первый исполнительный механизм, второй исполнительный механизм и третий исполнительный механизм, которые имеют конфигурацию треноги с опорами в одной плоскости и каждый из которых имеет верхний конец и нижний конец,
при этом верхние концы соединены с возможностью поворота с концом манипулятора робота, нижние концы соединены с возможностью поворота с печатающей головкой;
верхние концы первого и третьего исполнительного механизма размещены на расстоянии друг от друга;
нижние концы первого и третьего исполнительного механизма размещены на расстоянии друг от друга;
верхний конец второго исполнительного механизма расположен возле верхнего конца первого исполнительного механизма;
нижний конец второго исполнительного механизма расположен возле нижнего конца третьего исполнительного механизма таким образом, что второй исполнительный механизм проходит по диагонали между верхним концом первого исполнительного механизма и нижним концом третьего исполнительного механизма и
первый, второй и третий исполнительные механизмы обеспечивают возможность регулировки печатающей головки вдоль поперечного направления, нормального направления и качательного направления.
Пункт 13. Способ печати изображения на поверхности, включающий:
размещение манипулятора робота возле поверхности, при этом манипулятор имеет печатающую головку, установленную на манипуляторе;
перемещение, с использованием манипулятора, печатающей головки поверх поверхности по траектории растеризации во время печати участка изображения на указанной поверхности; и
печать полосы градиента изображения по меньшей мере вдоль одной боковой кромки участка изображения во время печати участка изображения, причем полоса градиента изображения имеет интенсивность изображения, которая уменьшается вдоль направления к боковой кромке.
Пункт 14. Способ по пункту 13, согласно которому этапы перемещения печатающей головки и печати полосы градиента изображения включают в себя:
перемещение печатающей головки по траектории растеризации для печати нового участка изображения параллельно существующему участку изображения таким образом, что полоса градиента изображения нового участка изображения перекрывает полосу градиента изображения существующего участка изображения.
Пункт 15. Способ по пункту 14, согласно которому этап печати полосы градиента изображения включает в себя:
печать полосы градиента изображения нового участка изображения и существующего участка изображения таким образом, что перекрытие полос градиента изображения имеет интенсивность изображения, эквивалентную интенсивности изображения внутренней части по меньшей мере одного из таких участков, как новый участок изображения и существующий участок изображения.
Пункт 16. Способ по пункту 13, согласно которому печатающая головка включает в себя совокупность сопел для выброса капель, а этап формирования полосы градиента изображения включает в себя:
выбрасывание капель вдоль направления к боковой кромке с постепенно увеличивающимися расстояниями между каплями и
выбрасывание капель постепенно уменьшающихся размеров вдоль направления к боковой кромке.
Пункт 17. Способ печати изображения на поверхности, включающий:
печать, с использованием печатающей головки, установленной на манипуляторе робота, нового участка изображения на указанной поверхности при перемещении печатающей головки поверх поверхности по траектории растеризации;
печать привязочной линии на указанной поверхности во время печати нового участка изображения;
обнаружение, с использованием датчика привязочной линии, привязочной линии существующего участка изображения во время печати нового участка изображения; и
регулировку бокового положения нового участка изображения на основании обнаруженного положения привязочной линии с выравниванием боковой кромки нового участка изображения с боковой кромкой существующего участка изображения.
Пункт 18. Способ по пункту 17, согласно которому этап печати привязочной линии содержит:
печать привязочной линии с использованием по меньшей мере одного сопла печатающей головки.
Пункт 19. Способ по пункту 17, согласно которому этап регулировки бокового положения нового участка изображения включает в себя:
передачу от датчика привязочной линии роботу сигнала, показательного в отношении обнаруженного положения печатающей головки относительно привязочной линии;
определение корректировочных входных данных на основании обнаруженного положения печатающей головки и
регулировку, на основе корректировочных входных данных, бокового положения печатающей головки.
Пункт 20. Способ по пункту 17, согласно которому этап регулировки бокового положения нового участка изображения включает в себя:
электронный сдвиг сопел, активно выбрасывающих капли.
Пункт 21. Способ по пункту 17, согласно которому этап регулировки бокового положения нового участка изображения включает в себя:
регулировку бокового положения печатающей головки таким образом, что боковая кромка нового участка изображения удерживается без промежутков и без перекрытия с боковой кромкой существующего участка изображения.
Пункт 22. Способ по пункту 17, согласно которому этап регулировки бокового положения нового участка изображения включает в себя:
регулировку бокового положения печатающей головки с использованием по меньшей мере одного широкополосного исполнительного механизма, соединяющего печатающую головку с концом манипулятора.
Пункт 23. Способ по пункту 22, согласно которому
этап регулировки бокового положения печатающей головки с использованием по меньшей мере одного широкополосного исполнительного механизма включает в себя по меньшей мере одно из следующего:
поступательное перемещение печатающей головки вдоль поперечного направления параллельно поверхности и перпендикулярно траектории растеризации;
поступательное перемещение печатающей головки вдоль нормального направления, проходящего по нормали к поверхности; и
поворот печатающей головки вдоль качательного направления вокруг оси, параллельной траектории растеризации.
Дополнительные модификации и усовершенствования настоящего раскрытия могут быть очевидны для специалистов в данной области техники. Соответственно, конкретное сочетание частей, описанное и проиллюстрированное в настоящем документе, приведено только с целью демонстрации определенных вариантов реализации настоящего изобретения и не предназначено для ограничения альтернативных вариантов реализации или устройств, находящихся в пределах объема формулы настоящего изобретения.
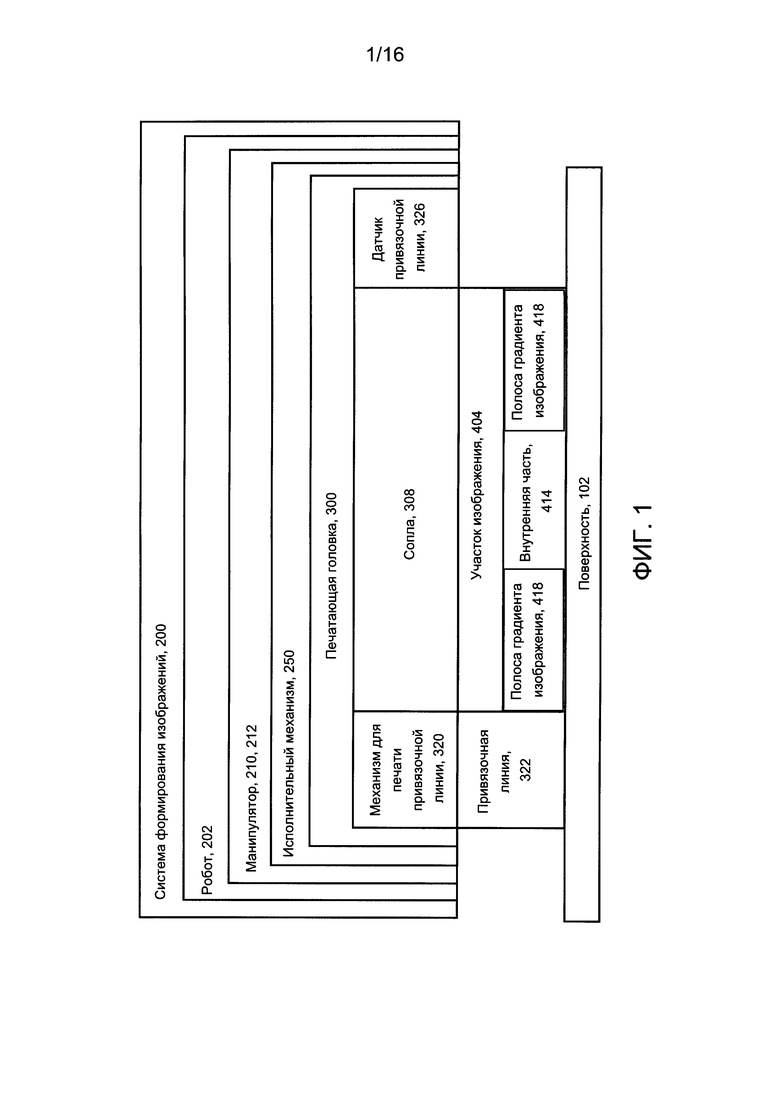
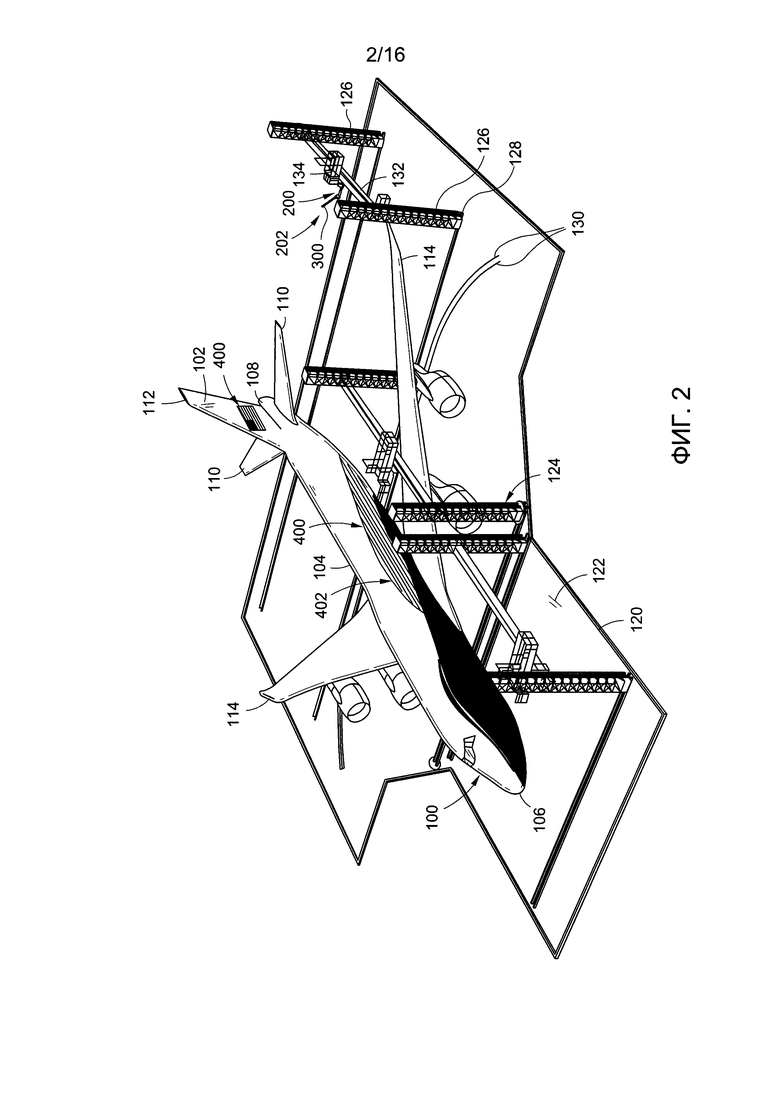
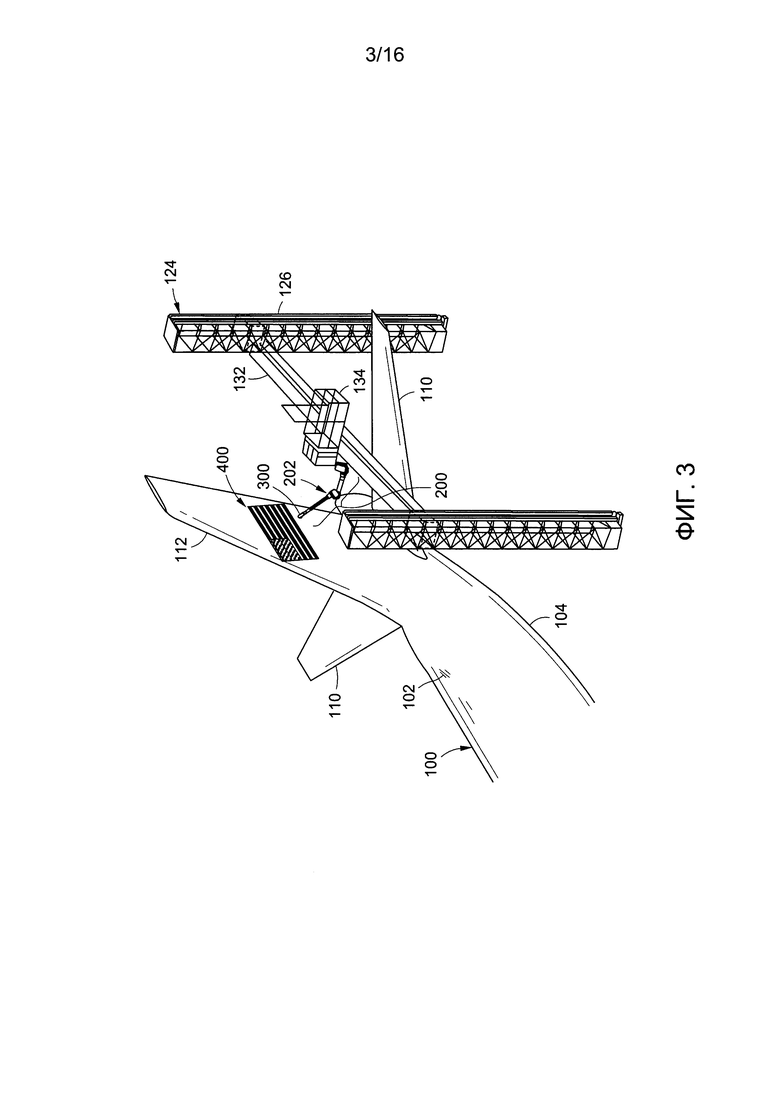
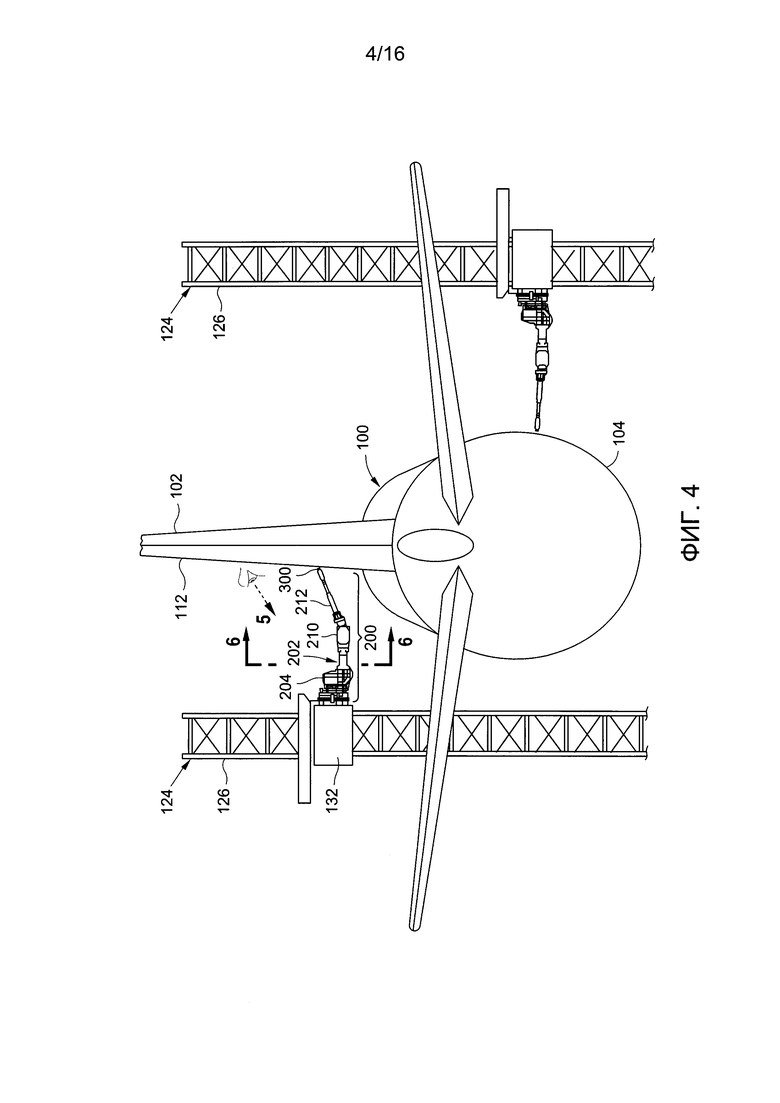
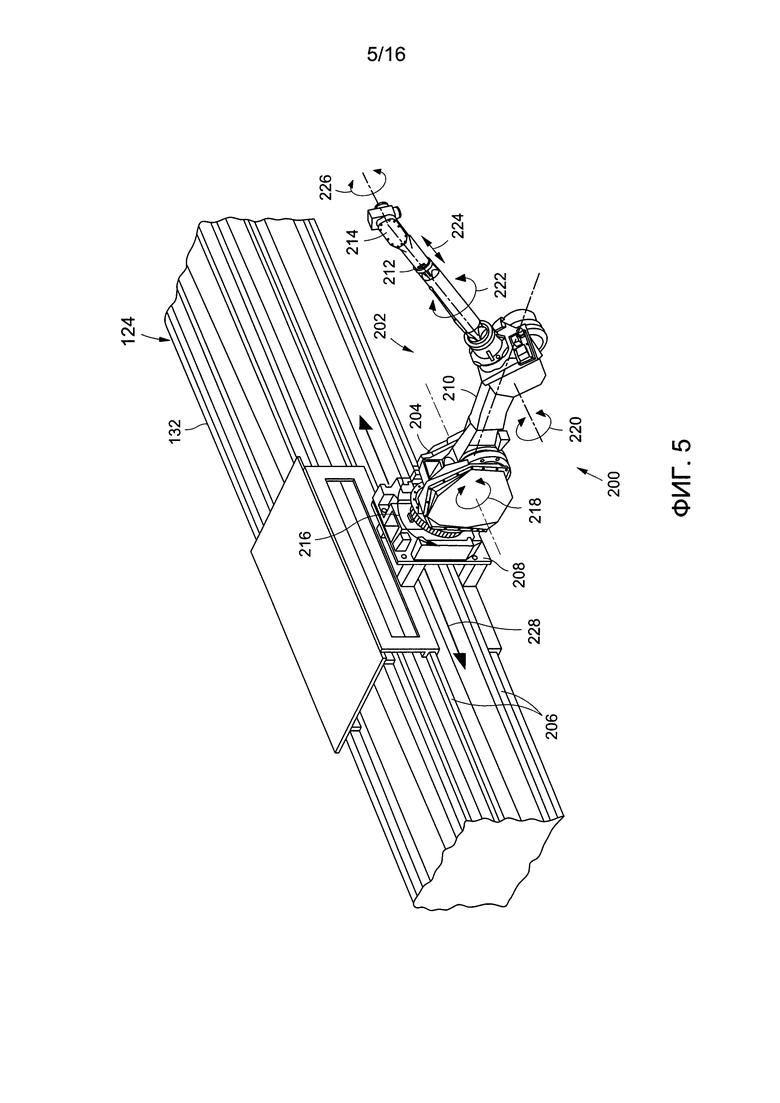
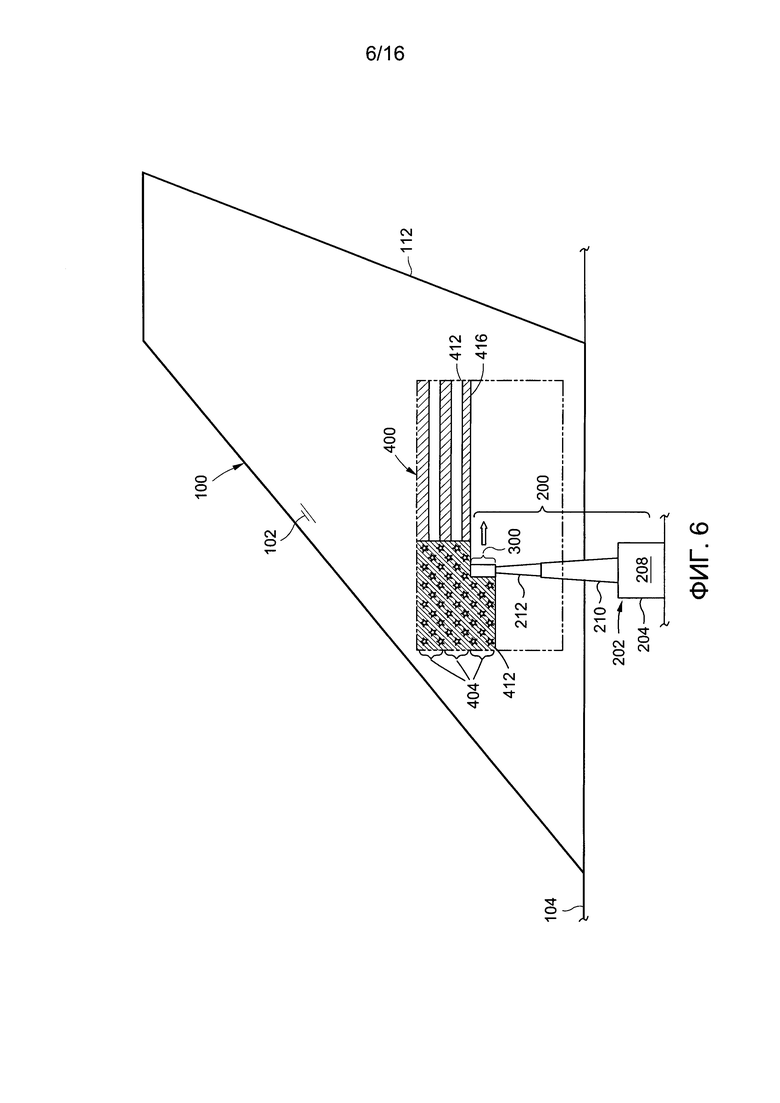
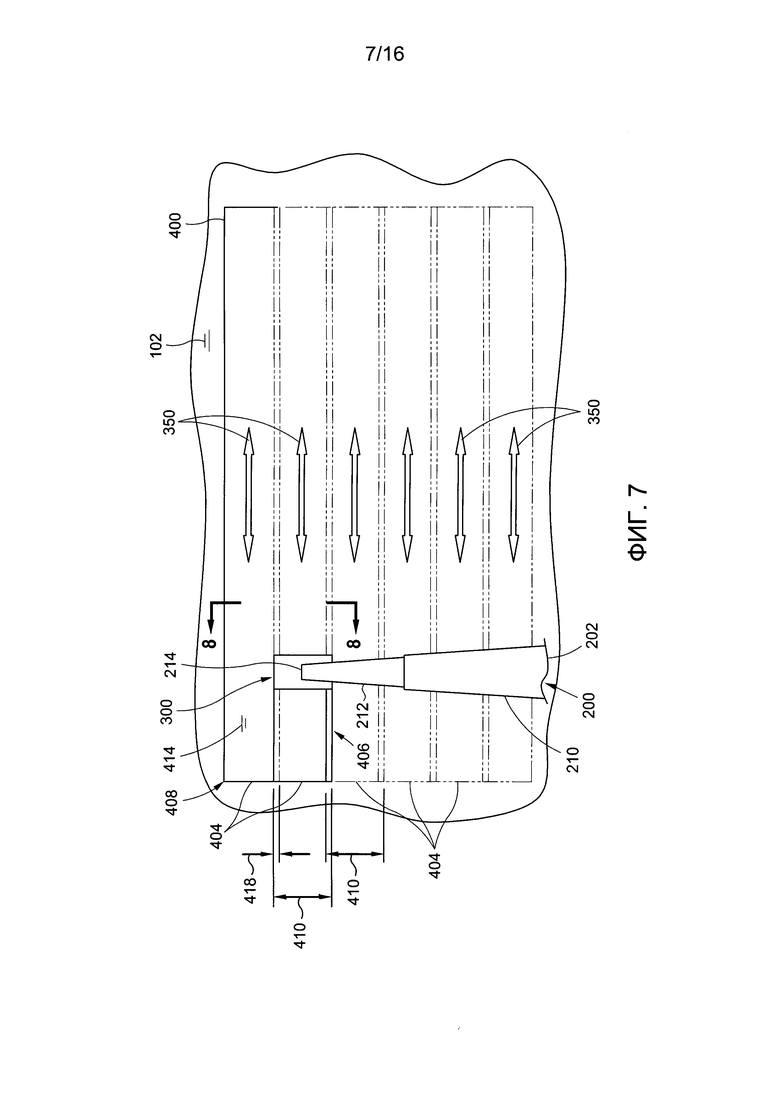
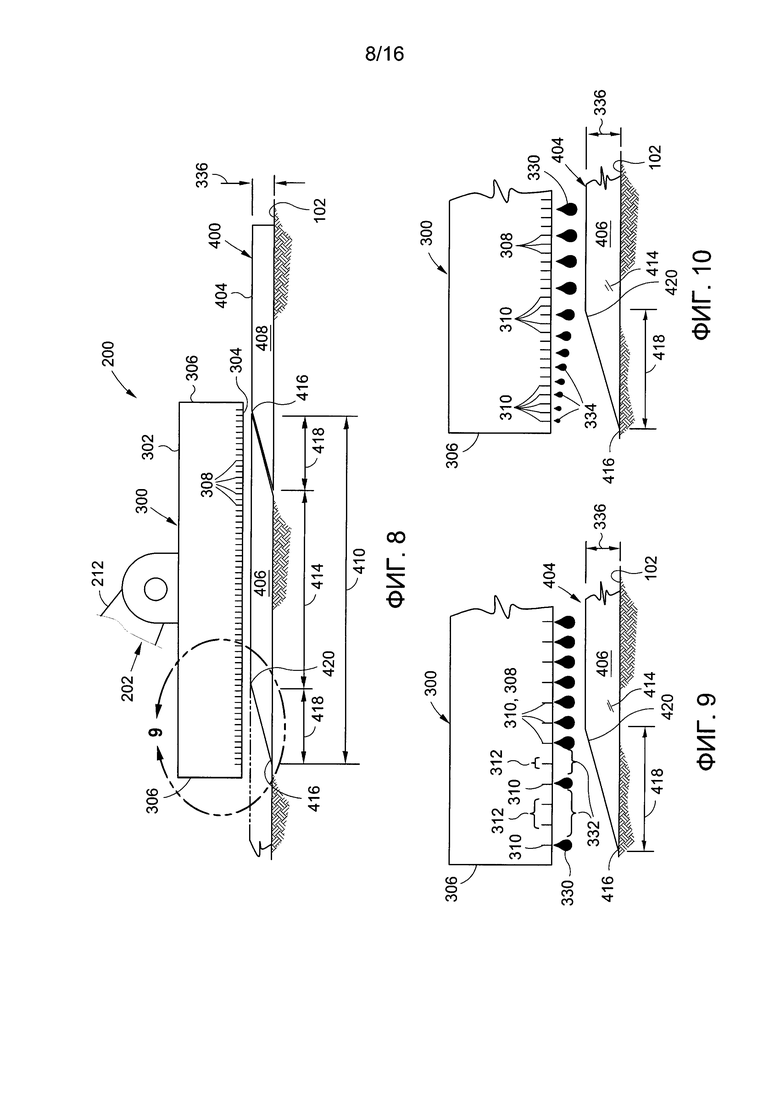
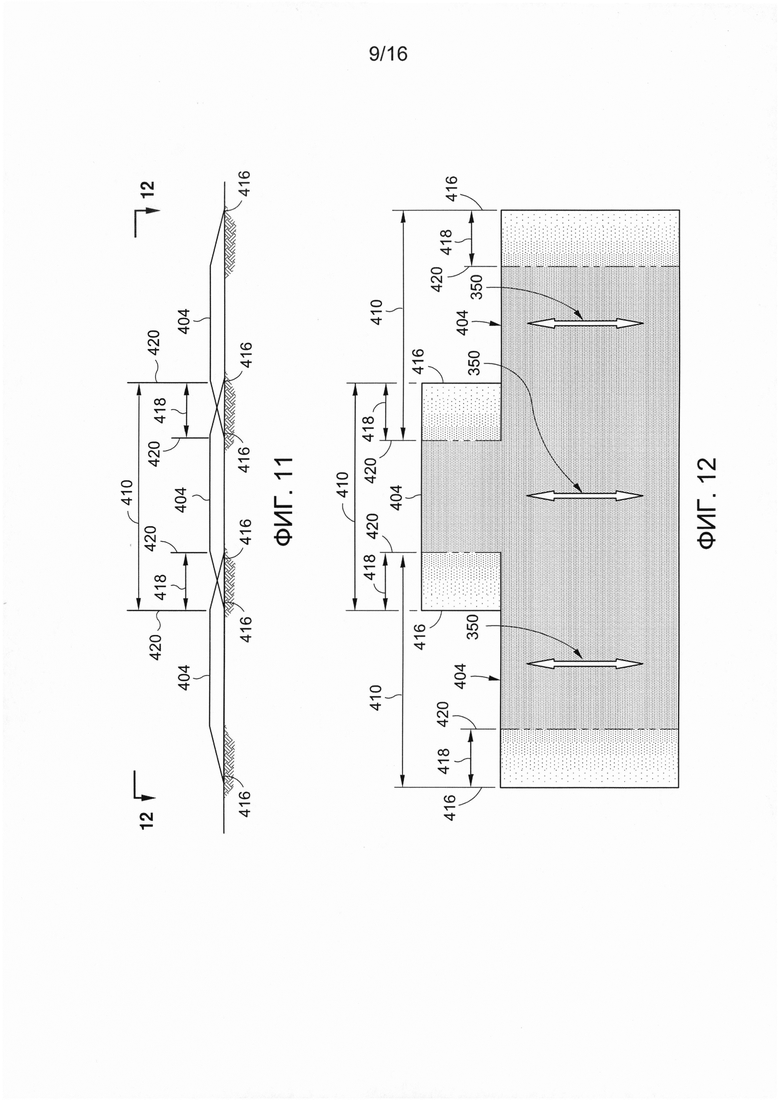
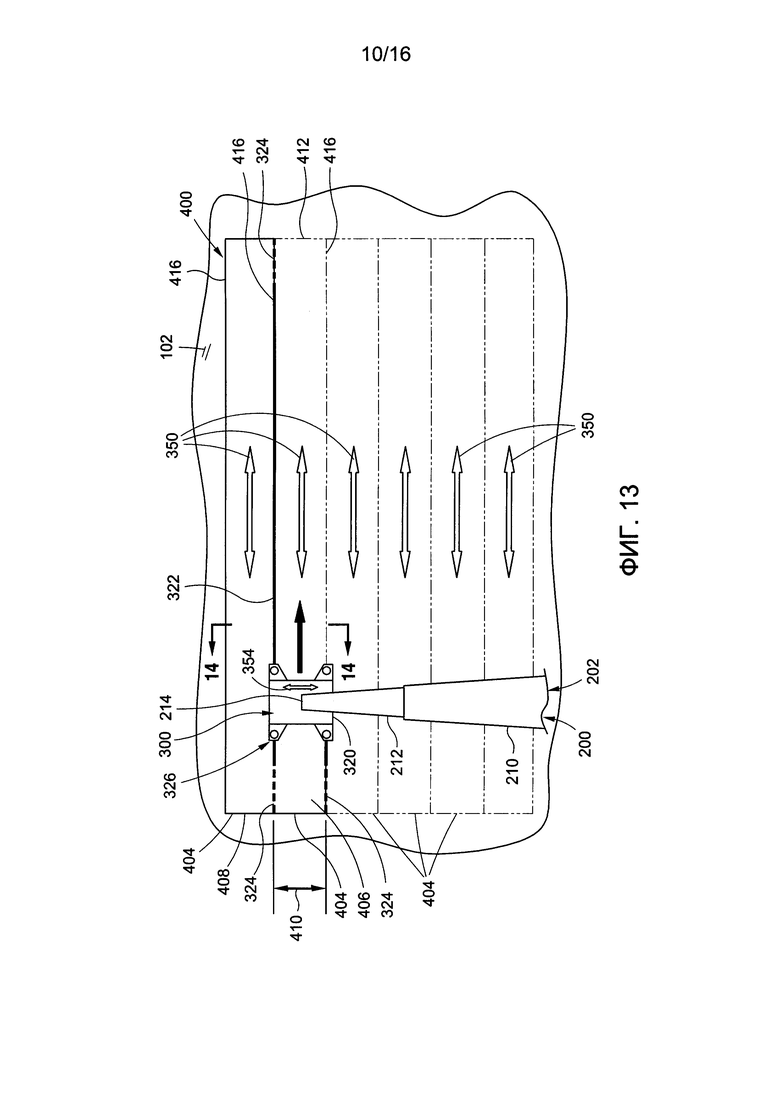
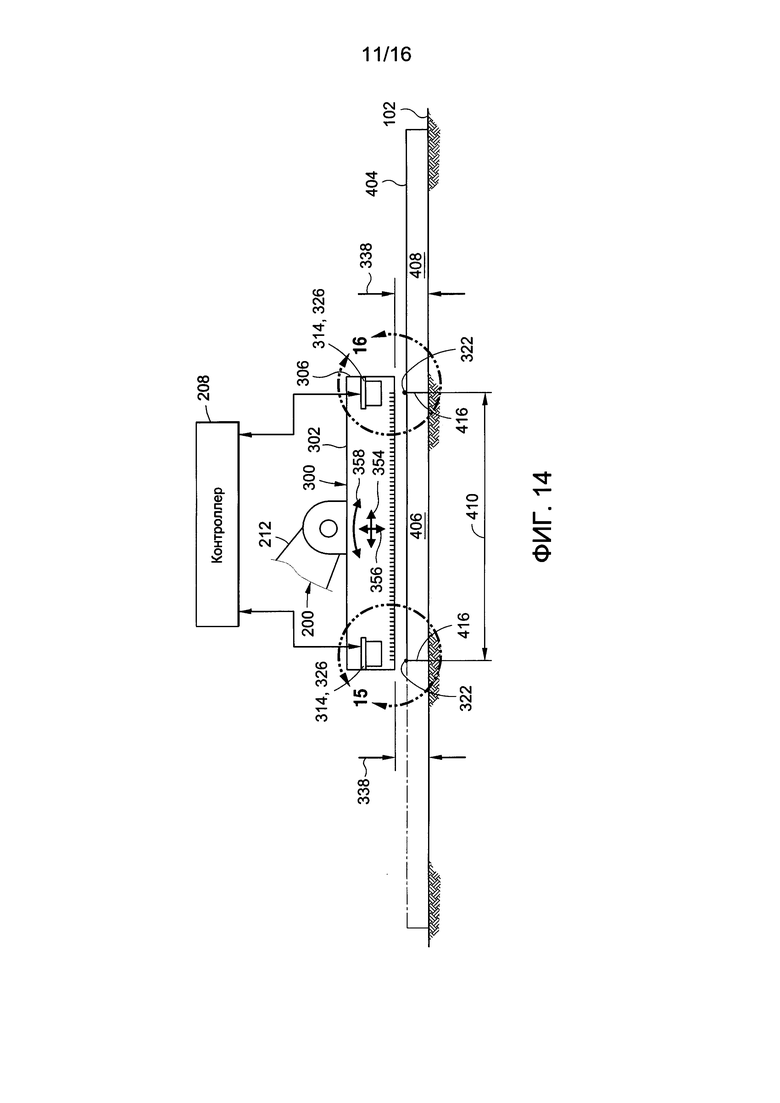
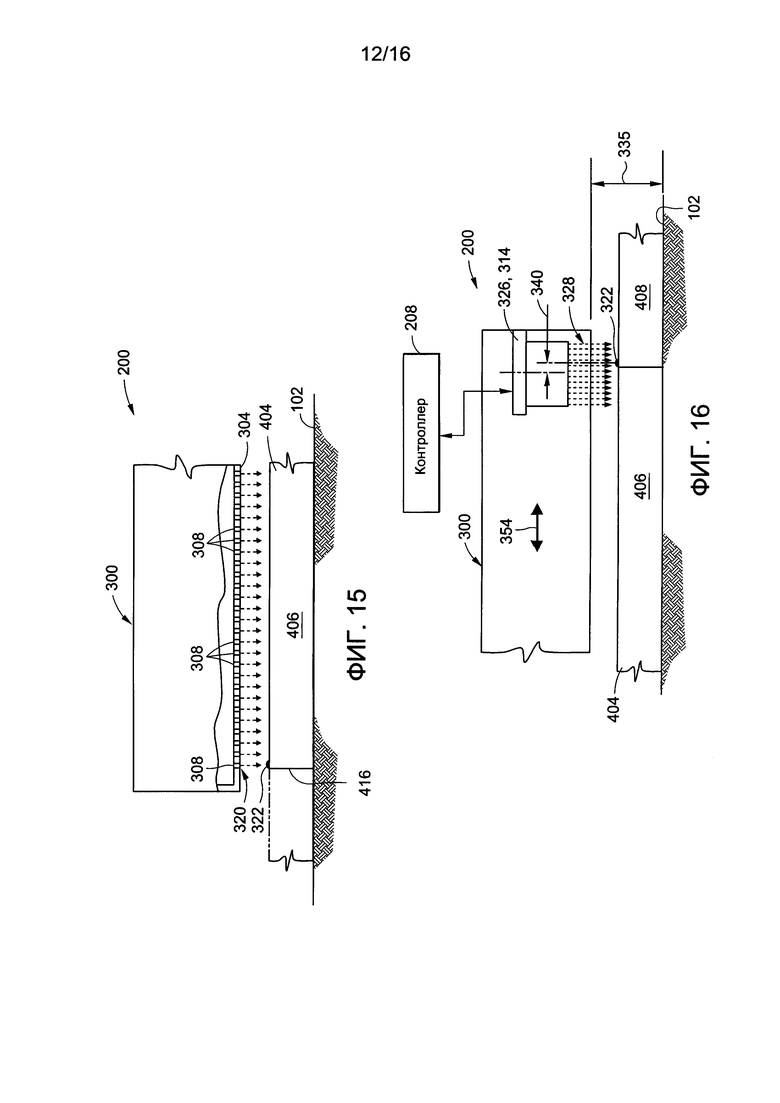
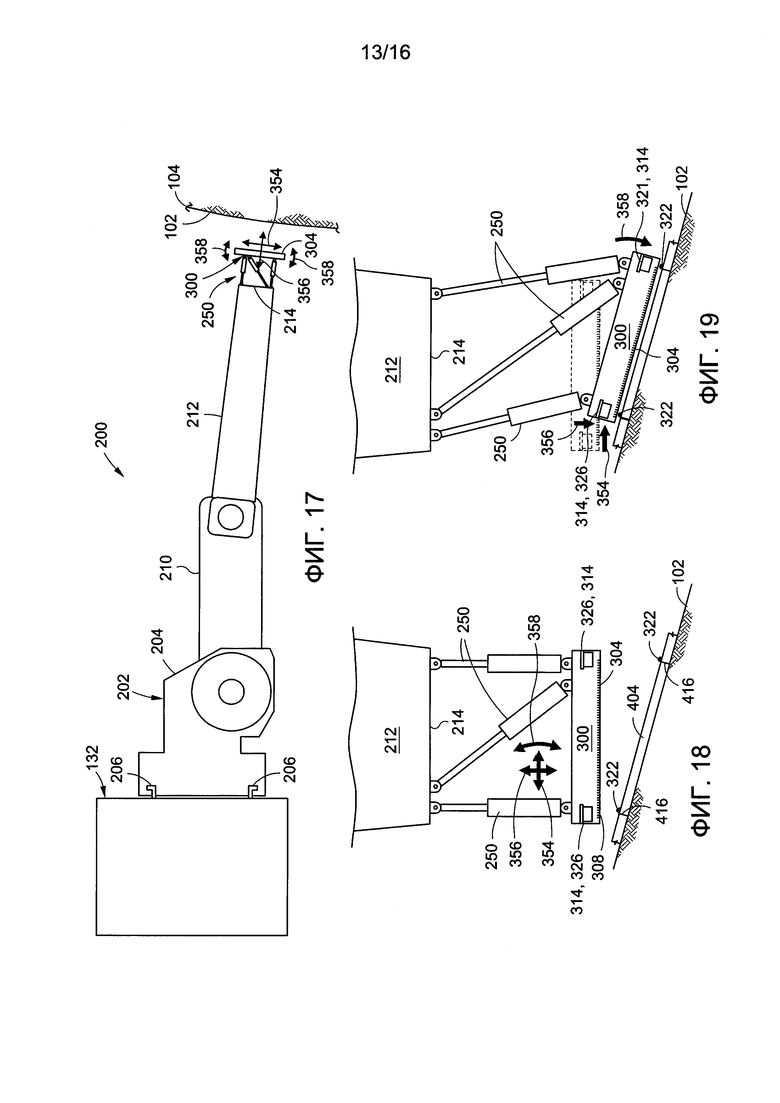
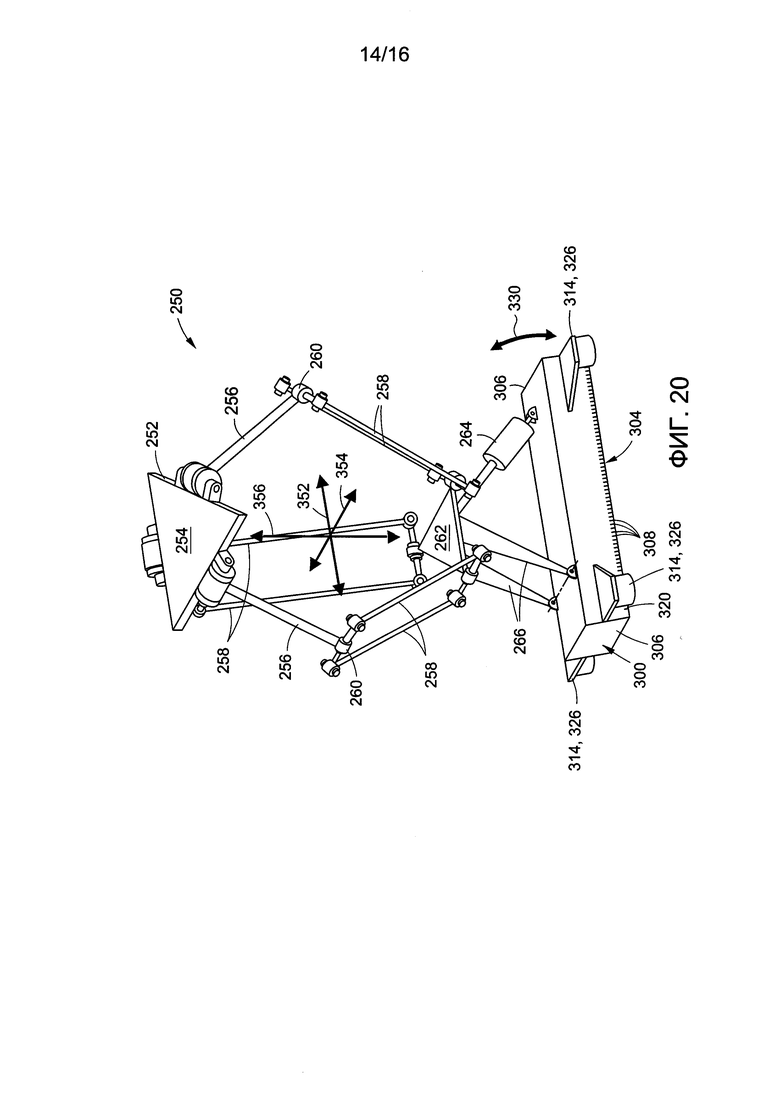
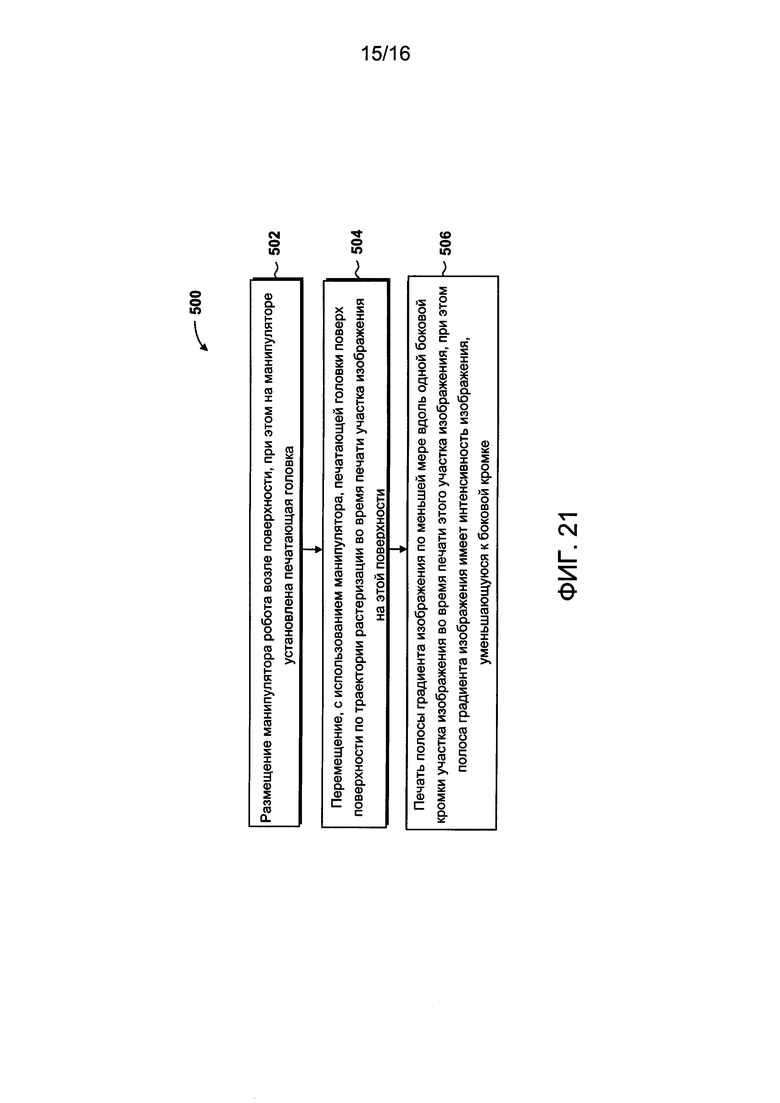
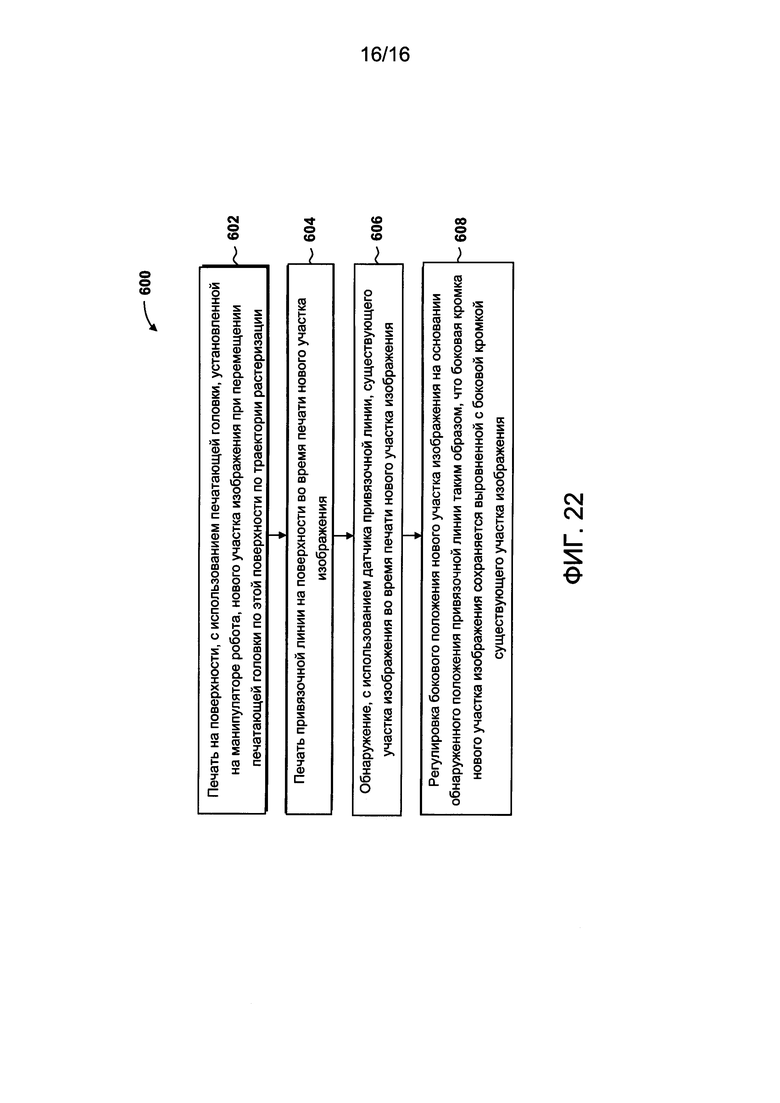
Система для печати изображения на поверхности может включать в себя робота, имеющего по меньшей мере один манипулятор. Печатающая головка может быть установлена на манипуляторе и может быть выполнена с возможностью перемещения манипулятором поверх поверхности по траектории растеризации во время печати участка изображения на указанной поверхности. Участок изображения может иметь противоположные боковые кромки. Печатающая головка может быть выполнена с возможностью печати участка изображения с полосой градиента изображения по меньшей мере вдоль одной из противоположных боковых кромок, причем интенсивность изображения в пределах полосы градиента изображения уменьшается от внутренней части полосы градиента изображения к боковой кромке. Предложенное решение обеспечивает нанесение сложных и/или многоцветных изображений точно и эффективно с точки зрения затрат и времени. 3 н. и 17 з.п. ф-лы, 22 ил.
1. Система (200) для печати изображения (400) на поверхности (102), содержащая:
робота (202), имеющего по меньшей мере один манипулятор (210),
печатающую головку (300), снабженную множеством сопел (308) и установленную на указанном манипуляторе (210),
причем печатающая головка (300) выполнена с возможностью перемещения манипулятором (210) поверх поверхности (102) по траектории (350) растеризации с печатью участка (404) изображения на указанной поверхности (102) и с возможностью печати участка (404) изображения с полосой (418) градиента изображения (400) по меньшей мере вдоль одной из противоположных боковых кромок (416) полосы (418) градиента изображения,
интенсивность изображения в пределах полосы (418) градиента изображения уменьшается от внутренней части (414) полосы (418) градиента изображения к указанной боковой кромке (416), а
робот (202) выполнен с возможностью электронного сдвига групп сопел (308), активно выбрасывающих капли (330), из указанного множества сопел (308) с выравниванием боковой кромки (416) нового участка (406) изображения с боковой кромкой (416) существующего участка (408) изображения.
2. Система (200) по п. 1, в которой указанный манипулятор (210) выполнен с возможностью перемещения печатающей головки (300) параллельно существующему участку (408) изображения таким образом, что полоса (418) градиента изображения нового участка (406) изображения перекрывает полосу (418) градиента изображения существующего участка (408) изображения.
3. Система (200) по п. 2, в которой печатающая головка (300) выполнена с возможностью печати полосы (418) градиента изображения нового участка (406) изображения и существующего участка (408) изображения таким образом, что перекрытие полос (418) градиента изображения имеет интенсивность изображения, эквивалентную интенсивности изображения внутренней части (414) по меньшей мере одного из таких участков, как новый участок (406) изображения и существующий участок (408) изображения.
4. Система (200) по любому из пп. 1-3, в которой
печатающая головка (300) содержит совокупность сопел (308), распределенных вдоль ширины (302) печатающей головки, причем
печатающая головка (300) выполнена с возможностью создания полосы (418) градиента изображения путем выбрасывания капель (330) по меньшей мере одним из следующих способов:
постепенное увеличение расстояния (332) между каплями в направлении к боковой кромке (416) и
постепенное уменьшение размера (334) капли в направлении к боковой кромке (416).
5. Система (200) по любому из пп. 1-3, также содержащая:
механизм (320) для печати привязочной линии, выполненный с возможностью печати привязочной линии (322) на указанной поверхности (102) во время печати нового участка (406) изображения, и
датчик (326) привязочной линии, выполненный с возможностью обнаружения привязочной линии (322) существующего участка (408) изображения и с возможностью передачи роботу (202) сигнала, заставляющего манипулятор (210) регулировать печатающую головку (300) с выравниванием боковой кромки (416) нового участка (406) изображения с боковой кромкой (416) существующего участка (408) изображения.
6. Система (200) по п. 5, в которой механизм (320) для печати привязочной линии содержит по меньшей мере одно сопло печатающей головки (300).
7. Система (200) по п. 5, в которой робот (202) выполнен с возможностью регулировки бокового положения печатающей головки (300) с выравниванием боковой кромки (416) нового участка (406) изображения с боковой кромкой (416) существующего участка (408) изображения.
8. Система (200) по п. 5, также содержащая по меньшей мере один широкополосный исполнительный механизм (250), соединяющий печатающую головку (300) с одним из концов манипулятора (210) и выполненный с возможностью регулировки ориентации и/или положения печатающей головки (300) относительно поверхности (102) во время перемещения печатающей головки (300) по траектории (350) растеризации.
9. Система (200) по любому из пп. 1-3 и 6-8, в которой
широкополосный исполнительный механизм (250) выполнен с возможностью регулировки печатающей головки (300) по меньшей мере в одном из следующих направлений:
поперечное направление (354) поступательного перемещения параллельно указанной поверхности (102) и перпендикулярно траектории (350) растеризации,
нормальное направление (356) поступательного перемещения, проходящее по нормали к указанной поверхности (102), и
качательное направление (358) поворота вокруг оси, параллельной траектории (350) растеризации.
10. Система (200) по п. 9, в которой
широкополосный исполнительный механизм (250) содержит первый исполнительный механизм (250а), второй исполнительный механизм (250b) и третий исполнительный механизм (250с), которые имеют конфигурацию треноги с опорами в одной плоскости и каждый из которых имеет верхний конец (268) и нижний конец (270),
при этом верхние концы (268) соединены с возможностью поворота с одним из концов (214) указанного манипулятора (210) робота (202), нижние концы (270) соединены с возможностью поворота с печатающей головкой (300),
верхние концы (268) первого и третьего исполнительных механизмов (250а, 250с) размещены на расстоянии друг от друга,
нижние концы (270) первого и третьего исполнительных механизмов (250а, 250с) размещены на расстоянии друг от друга,
верхний конец (268) второго исполнительного механизма (250b) расположен возле верхнего конца (268) первого исполнительного механизма (250а),
нижний конец (270) второго исполнительного механизма (250b) расположен возле нижнего конца (270) третьего исполнительного механизма (250с) таким образом, что второй исполнительный механизм (250b) проходит по диагонали между верхним концом (268) первого исполнительного механизма (250а) и нижним концом (270) третьего исполнительного механизма (250с), причем
первый, второй и третий исполнительные механизмы (250а, 250b, 250с) обеспечивают возможность регулировки печатающей головки (300) в поперечном направлении (354), нормальном направлении (356) и качательном направлении (358).
11. Способ печати изображения (400) на поверхности (102), включающий:
размещение манипулятора (210) робота (202) возле поверхности (102), при этом на манипуляторе (210) установлена печатающая головка (300), снабженная множеством сопел (308),
перемещение, с использованием манипулятора (210), печатающей головки (300) поверх поверхности (102) по траектории (350) растеризации с печатью участка (404) изображения на указанной поверхности (102) и
печать полосы (418) градиента изображения по меньшей мере вдоль одной боковой кромки (416) участка (404) изображения во время печати участка (404) изображения, причем полоса (418) градиента изображения имеет интенсивность изображения, которая уменьшается в направлении к боковой кромке (416), а если боковая кромка (416) нового участка (406) изображения не выровнена с боковой кромкой (416) существующего участка (408) изображения, электронный сдвиг, посредством робота (202), групп сопел (308), активно выбрасывающих капли (330), из указанного множества сопел (308) с выравниванием боковой кромки (416) нового участка (406) изображения с боковой кромкой (416) существующего участка (408) изображения.
12. Способ по п. 11, согласно которому этап перемещения печатающей головки (300) и этап печати полосы (418) градиента изображения включают перемещение печатающей головки (300) по траектории (350) растеризации с печатью нового участка (406) изображения параллельно существующему участку (408) изображения таким образом, что полоса (418) градиента изображения нового участка (406) изображения перекрывает полосу (418) градиента изображения существующего участка (408) изображения.
13. Способ по п. 12, согласно которому этап печати полосы (418) градиента изображения включает печать полосы (418) градиента изображения нового участка (406) изображения и существующего участка (408) изображения таким образом, что перекрытие полос (418) градиента изображения имеет интенсивность изображения, эквивалентную интенсивности изображения внутренней части (414) по меньшей мере одного из таких участков, как новый участок (406) изображения и существующий участок (408) изображения.
14. Способ по любому из пп. 11-13, согласно которому печатающая головка (300) содержит совокупность сопел (308) для выброса капель (330), а этап создания полосы (418) градиента изображения включает:
выбрасывание капель в направлении к боковой кромке (416) с постепенно увеличивающимися расстояниями (332) между каплями и
выбрасывание капель постепенно уменьшающихся размеров (334) в направлении к боковой кромке (416).
15. Способ печати изображения на поверхности, включающий:
печать, с использованием печатающей головки, снабженной множеством сопел и установленной на манипуляторе робота, нового участка изображения на указанной поверхности при перемещении печатающей головки поверх указанной поверхности по траектории растеризации,
печать привязочной линии на указанной поверхности во время печати нового участка изображения,
обнаружение, с использованием датчика привязочной линии, привязочной линии существующего участка изображения во время печати нового участка изображения и
регулировку бокового положения нового участка изображения на основании обнаруженного положения привязочной линии с выравниванием боковой кромки нового участка изображения с боковой кромкой существующего участка изображения, причем
если боковая кромка нового участка изображения не выровнена с боковой кромкой существующего участка изображения, электронный сдвиг, посредством робота, групп сопел, активно выбрасывающих капли, в указанном множестве сопел с выравниванием боковой кромки нового участка изображения с боковой кромкой существующего участка изображения.
16. Способ по п. 15, согласно которому этап печати привязочной линии включает печать привязочной линии с использованием по меньшей мере одного сопла печатающей головки.
17. Способ по п. 15 или 16, согласно которому этап регулировки бокового положения нового участка изображения включает:
передачу от датчика привязочной линии роботу сигнала, показательного в отношении обнаруженного положения печатающей головки относительно привязочной линии,
определение корректировочных входных данных на основании обнаруженного положения печатающей головки и
регулировку, на основе корректировочных входных данных, бокового положения печатающей головки.
18. Способ по п. 15 или 16, согласно которому этап регулировки бокового положения нового участка изображения включает регулировку бокового положения печатающей головки с удержанием боковой кромки нового участка изображения без промежутков и без перекрытия по отношению к боковой кромке существующего участка изображения.
19. Способ по п. 15 или 16, согласно которому этап регулировки бокового положения нового участка изображения включает регулировку бокового положения печатающей головки с использованием по меньшей мере одного широкополосного исполнительного механизма, соединяющего печатающую головку с одним из концов манипулятора.
20. Способ по п. 19, согласно которому этап регулировки бокового положения печатающей головки с использованием по меньшей мере одного широкополосного исполнительного механизма включает в себя по меньшей мере одно из следующего:
поступательное перемещение печатающей головки в поперечном направлении параллельно указанной поверхности и перпендикулярно траектории растеризации,
поступательное перемещение печатающей головки в нормальном направлении, проходящем по нормали к указанной поверхности, и
поворот печатающей головки в качательном направлении вокруг оси, параллельной траектории растеризации.
| КРЫЛО МНОГОФУНКЦИОНАЛЬНОГО СВЕРХЛЕГКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208541C1 |
| US 6508531 B1, 21.01.2003 | |||
| US 2014063096 A1, 06.03.2014. | |||

