Данное изобретение касается устройства для робот-ассистированной хирургии, содержащего роботизированную руку, которая расположена по меньшей мере в одной нестерильной зоне и снабжена блоком связи, имеющим по меньшей мере одно первое передающее средство. Данное устройство содержит по меньшей мере один расположенный в стерильной зоне стерильный блок, который включает в себя по меньшей мере одно второе передающее средство и стерильный чехол для отгораживания роботизированной руки от стерильной зоны. Изобретение касается также системы для робот-ассистированной хирургии, содержащей такое устройство для робот-ассистированной хирургии и по меньшей мере один блок ввода для введения по меньшей мере одной команды ввода. Далее, данное изобретение касается стерильного шлюза, в частности, для использования в таких устройствах, а также робот-ассистированного хирургического способа, при котором стерильный блок может несколько раз подряд соединяться с роботизированной рукой.
В минимально инвазивной хирургии все больше применяются так называемые системы с дистанционно-управляемыми манипуляторами, которые называют также робот-ассистированными системами. Стерильное операционное поле защищается от нестерильных элементов системы с дистанционно-управляемым манипулятором с помощью стерильного чехла. Посредством этого стерильного чехла предотвращается как бактериальное загрязнение стерильного операционного поля, так и загрязнение системы с дистанционно-управляемым манипулятором биологическими жидкостями и/или тканями оперируемого пациента или оперирующего персонала. Благодаря этому предотвращается риск перекрестного бактериального загрязнения.
С помощью системы с дистанционно-управляемым манипулятором хирургические инструменты и/или эндоскопы на основании ввода данных управления регулируются по их положению и ориентации и при этом принудительно вводятся в физический контакт с оперируемым пациентом, так что эти хирургические инструменты и/или эндоскопы загрязняются биологическими жидкостями и/или тканями оперируемого пациента. Одновременно эти хирургические инструменты должны быть механически, электрически и/или оптически связаны с указанной системой с дистанционно-управляемым манипулятором, чтобы обеспечивать возможность реализации активного позиционирования и ориентирования хирургического инструмента, а также желаемого управления хирургическим инструментом. Для этого такие хирургические инструменты, эндоскопы или применяемые медицинские приборы могут иметь связной интерфейс, который может быть выполнен как блок связи, а также обозначается как стерильный блок.
Используемый во время хирургического вмешательства материал, включая используемые хирургические аппараты и инструменты, и другие компоненты системы с дистанционно-управляемым манипулятором можно разделить на три категории.
Категория 1: материал стерилен и бактериально загрязняется во время хирургического вмешательства. Этот материал после операции удаляется. Таким образом, имеет место одноразовое использование материала.
Категория 2: материал стерилен, во время хирургического вмешательства бактериально загрязняется, а после операции очищается и стерилизуется. Таким образом, имеет место многоразовое использование материала. Такие многократно используемые материалы должны разрабатываться и производиться в соответствии с требованиями по технологически реализуемой стерилизуемости.
Категория 3: материал не стерилен. Во время хирургического вмешательства посредством стерильного чехла и внешней упаковки предотвращается бактериальное загрязнение стерильного операционного поля. Одновременно этот нестерильный материал защищается от контакта с биологическими жидкостями и/или тканями.
Если требуется связывать приборы категории 1 или категории 2 с приборами категории 3, то необходим стерильный интерфейс, который предотвращает бактериальное загрязнение приборов категории 1 и, соответственно, категории 2 от нестерильных приборов категории 3 и, наоборот, предотвращает загрязнение приборов категории 3, так как они в общем технически изготовлены как не стерилизуемые и не автоклавируемые компоненты. Такое выполнение приборов в виде стерилизуемых и автоклавируемых компонентов требует особых технических расчетов прибора с учетом условий процесса стерилизации, так что для этого нужны высокие затраты на разработку, а также значительные затраты на квалификационные испытания для подтверждения эффективности процесса стерилизации. Для такого подтверждения необходимо, в частности, прибор несколько раз подряд загрязнять бактериально, стерилизовать, проводить проверку эффективности стерилизации, а также проводить проверку функционирования после проведенной стерилизации. При этом необходимо привести доказательство того, что эти приборы после каждой стерилизации надежно стерилизованы и, тем самым, могут быть снова использованы.
Из документа US 7,666,191 B1 известна система с дистанционно-управляемыми манипуляторами, в которой нестерильные роботизированные руки покрываются стерильной пленкой. Блок связи роботизированной руки содержит четыре устройства для приведения во вращение, которые связываются с первой стороной интегрированного в стерильную пленку стерильного адаптера. С помощью стерильного адаптера вращательные движения указанных четырех устройств для приведения во вращение указанного блока связи роботизированной руки связываются с четырьмя передающими средствами, интегрированными в этот стерильный адаптер и установленными в нем поворотно. На стерильной внешней стороне стерильного адаптера эти стерильные с внешней стороны стерильного адаптера передающие средства могут вводиться в зацепление с приводимыми элементами стерильного хирургического инструмента. Далее, через этот стерильный адаптер могут передаваться электрические сигналы между внутренней стороной и внешней стороной стерильного адаптера.
Таким образом, с помощью стерильного адаптера предотвращается прямое контактирование устройств для приведения во вращение и электрических подключающих элементов стерильного хирургического инструмента с устройствами для приведения во вращение и электрическими подключающими элементами блока связи нестерильной роботизированной руки. Бактериальное загрязнение хирургического инструмента вследствие контакта с нестерильными частями роботизированной руки предотвращается благодаря указанному стерильному адаптеру. Однако, при таком техническом решении необходимо, чтобы стерильный адаптер обязательно был снабжен установленным с возможностью вращения передающим средством, а также передающим средством для передачи электрических сигналов, из-за чего указанный адаптер дорог в изготовлении и подвержен сбоям в работе. В частности, затратным является обеспечение возможности вращения таких передающих средств, если эти передающие средства входят в контакт с биологической жидкостью.
В принципе, любой элемент в этой функциональной цепи для связывания роботизированной руки и инструмента является возможным источником ошибки и сопряжен с дополнительными затратами. Стерильный адаптер как таковой представляет собой часть стерильной пленки для одноразового использования.
Из документа US 8,074,657 B2 известен еще один стерильный адаптер, который содержит приводной блок для передачи механической энергии на связанный со стерильным адаптером хирургический инструмент.
Задача данного изобретения заключается в том, чтобы предложить устройство и способ для робот-ассистированной хирургии, при которых возможно простое стерильное связывание роботизированной руки, установленной в нестерильной зоне, со стерильным блоком, находящимся в стерильной зоне. Кроме того, предлагается система для робот-ассистированной хирургии внутри стерильной зоны, а также стерильный шлюз для соединения блока связи роботизированной руки со стерильным блоком.
Эта задача решается посредством устройства для робот-ассистированной хирургии с признаками независимого пункта 1 формулы изобретения, а также посредством системы, посредством стерильного шлюза и посредством способа с признаками соответствующих независимых пунктов формулы изобретения. Предпочтительные модификации данного изобретения охарактеризованы в зависимых пунктах формулы.
Согласно данному изобретению, в частности, благодаря наличию стерильного шлюза, который может быть соединен как с блоком связи, так и со стерильным блоком, при соединении этого стерильного блока со стерильным шлюзом открывается клапан шлюза, предпочтительно автоматически механически, так что первое передающее средство блока связи и второе передающее средство стерильного блока располагаются противоположно друг другу, причем между ними нет никаких дополнительных передающих элементов. При этом указанные передающие средства могут непосредственно контактировать друг с другом, или происходит передача через воздушный зазор между первым передающим средством и вторым передающим средством. Благодаря этому при соединении стерильного блока со стерильным шлюзом стерильно закрытое клапаном шлюза первое передающее средство освобождается для осуществления передачи с вторым передающим средством. При отделении стерильного блока от стерильного шлюза по меньшей мере первое передающее средство снова стерильно отгораживается. Предпочтительно указанный стерильный шлюз при соединении с ним стерильного блока или, соответственно, при отделении от него стерильного блока уже соединен с блоком связи. Предпочтительно этот стерильный шлюз в течение всего времени хирургического вмешательства остается соединенным с блоком связи, причем стерильный блок многократно отделяется от блока связи роботизированной руки и снова соединяется с ним или, соответственно, может заменяться другим стерильным блоком. Далее, можно этот стерильный шлюз соединить с блоком связи и со стерильным блоком таким образом, что первое передающее средство будет находиться с вторым передающим средством в непосредственном соединении, предпочтительно в непосредственном зацеплении.
Благодаря данному изобретению, тем самым, в частности, можно выполнить стерильный шлюз без механических и/или электрических передающих средств, так что будет возможно как надежное стерильное изолирование нестерильной роботизированной руки и нестерильного блока связи, так и надежное связывание первого передающего устройства с вторым передающим средством без промежуточного включения дополнительных передающих средств, в частности, без промежуточного включения дополнительных механических передающих средств. Стерильный чехол содержит, в частности, стерильный гибкий материал, такой как стерильная пленка, и указанный по меньшей мере один стерильный шлюз.
Предпочтительно, если указанный стерильный блок имеет по меньшей мере один стерильный клапан, который в закрытом состоянии стерильно отгораживает второе передающее средство. При соединении стерильного блока со стерильным шлюзом происходит движение клапана шлюза и стерильного клапана из закрытого состояния в открытое состояние, так что через отверстие, освобожденное клапаном шлюза и стерильным клапаном в открытом состоянии, возможна прямая передача между первым передающим средством и вторым передающим средством. При отделении стерильного блока от стерильного шлюза происходит движение клапана шлюза и стерильного клапана соответственно из открытого состояния в закрытое состояние, так что клапан шлюза после отделения отгораживает первое передающее средство, а стерильный клапан после отделения отгораживает второе передающее средство от стерильной зоны.
Предпочтительно первое передающее средство блока связи содержит по меньшей мере один приводной элемент и/или по меньшей мере один первый электрический передающий элемент, и/или по меньшей мере один первый оптический передающий элемент. Второе передающее средство стерильного блока содержит по меньшей мере один приводимый элемент и/или один электрический контакт, и/или по меньшей мере один оптический передающий элемент. Стерильный шлюз может быть соединен с блоком связи и стерильным блоком таким образом, что указанный по меньшей мере один приводной элемент будет находиться механически в непосредственном зацеплении по меньшей мере с одним приводимым элементом. За счет этого между блоком связи и стерильным блоком может осуществляться простая и надежная передача моментов. Если стерильный блок является частью хирургического инструментального блока, то с помощью передаваемых от блока связи на стерильный блок моментов можно перемещать хирургический инструмент и/или управлять хирургическим инструментом этого инструментального блока, поскольку по меньшей мере один момент передается от приводного элемента на приводимый элемент. Альтернативно или дополнительно первый электрический передающий элемент может быть непосредственно связан с электрическим контактом, и/или оптический передающий элемент блока связи может быть непосредственно связан с оптическим передающим элементом стерильного блока.
Стерильный блок согласно определению, приведенному во вводной части описания, является материалом категории 1 и 2 и, таким образом, стерилен.
Далее, предпочтительно блок связи может соединяться с первой соединительной областью стерильного шлюза, а стерильный блок может соединяться со второй соединительной областью стерильного шлюза. Первая соединительная область и вторая соединительная область расположены предпочтительно на обращенных друг от друга сторонах стерильного шлюза. За счет этого возможно простое соединение и, тем самым, простое обращение как со стерильным чехлом, так и со стерильным блоком перед хирургическим вмешательством, во время него и после хирургического вмешательства. Далее, особенно предпочтительно, если вторая соединительная область выполнена как приемная область, в которой может быть по меньшей мере частично размещен стерильный блок при соединении с этой второй соединительной областью. Благодаря этому может быть создано простое и надежное соединение между стерильным блоком и стерильным шлюзом. В частности, стерильный блок по меньшей мере частично может быть вдавлен в приемную область и там зафиксирован.
Далее, предпочтительно, если стерильный шлюз имеет третью соединительную область, с которой может соединяться гибкий чехол, причем эта третья соединительная область расположена предпочтительно, проходя вокруг стерильного шлюза, в частности, проходя по боковой поверхности, предпочтительно между первой и второй соединительными областями. Посредством стерильного шлюза осуществляется простое соединение стерильной зоны и нестерильной зоны для соединения блока связи со стерильным блоком, и при этом не происходит такого бактериального загрязнения этого стерильного блока, что после отделения от стерильного шлюза его уже больше нельзя было бы оставлять в стерильной зоне.
Предпочтительно указанный блок связи расположен на проксимальном конце роботизированной руки. Альтернативно или дополнительно указанный стерильный блок является компонентом хирургического инструмента, эндоскопа и/или медицинского прибора, причем этот стерильный блок расположен, в частности, на дистальном конце хирургического инструмента, эндоскопа и/или медицинского прибора. Благодаря этому стерильный шлюз может использоваться для различных инструментов и приборов, необходимых при оперировании пациента, так что не потребуется использовать различные стерильные шлюзы или, соответственно, стерильные шлюзы с различным принципом действия.
Далее, предпочтительно, если первая соединительная область стерильного шлюза через первое разъемное фиксирующее соединение может соединяться с блоком связи, а вторая соединительная область стерильного шлюза через второе разъемное фиксирующее соединение может соединяться со стерильным блоком. Благодаря этому стерильный шлюз может надежно соединяться как с блоком связи, так и со стерильным блоком, и снова просто отсоединяться от них, так что возможно простое манипулирование как стерильным чехлом со стерильным шлюзом, так и стерильным блоком, в частности, во время операции.
Особенно предпочтительно, если блок связи содержит по меньшей мере один датчик связи, который детектирует наличие стерильного блока, корректно соединенного со стерильным шлюзом. Далее, данное устройство содержит блок управления, который допускает передачу между первым передающим средством и вторым передающим средством только в том случае, если с помощью датчика связи было установлено наличие стерильного блока, корректно соединенного со стерильным шлюзом. В еще одном предпочтительном варианте осуществления этот датчик связи с помощью предусмотренного на стерильном блоке детектирующего элемента, который при соединении со стерильным шлюзом выступает в первую соединительную область, с которой соединен блок связи, устанавливает наличие корректного соединения как стерильного блока со второй соединительной областью, так и блока связи с первой соединительной областью. Указанный блок управления открывает передачу между первым передающим средством и вторым передающим средством предпочтительно только в том случае или, соответственно, допускает ее только в том случае, если указанный датчик связи констатировал наличие корректного соединения между стерильным блоком и второй соединительной областью, а также наличие корректного соединения блока связи с первой соединительной областью.
Дополнительно с помощью датчика связи может быть просто обнаружено, корректно ли соединен по меньшей мере стерильный блок со стерильным шлюзом, так что в этом случае можно исходить из того, что стерильный блок корректно соединен со стерильным шлюзом, а через стерильный шлюз он корректно соединен с блоком связи роботизированной руки. Благодаря этому возможна надежная передача между первым передающим средством и вторым передающим средством.
Далее, предпочтительно, если указанный блок связи в качестве первого передающего средства содержит приводные элементы, а стерильный блок в качестве второго передающего средства имеет приводимые элементы. Приводные элементы при соединении блока связи со стерильным шлюзом находятся в таком случае в непосредственном механическом зацеплении с приводимыми элементами для механического соединения блока связи со стерильным блоком при соединении стерильного блока со стерильным шлюзом и при соединении блока связи со стерильным шлюзом. Альтернативно или дополнительно блок связи в качестве первого передающего средства содержит по меньшей мере один электрический контакт, а стерильный блок в качестве второго передающего средства имеет по меньшей мере один электрический контакт, ответный для указанного по меньшей мере одного электрического контакта. Электрический контакт блока связи и электрический контакт стерильного блока при соединении блока связи со стерильным шлюзом и при соединении стерильного блока со стерильным шлюзом создают непосредственное электрическое соединение между блоком связи и стерильным блоком. Такое электрическое соединение может использоваться, в частности, для передачи высокочастотной электрической энергии, в частности, для высокочастотной хирургии. Тем самым, указанный стерильный блок может быть компонентом высокочастотного хирургического прибора. Если предусмотрено несколько приводных элементов и несколько приводимых элементов, то можно простым образом обеспечить различные движения и/или манипуляции хирургическим инструментом, связанным через стерильный блок с блоком связи. Альтернативно или дополнительно оптические передающие элементы образуют оптический интерфейс между блоком связи и стерильным блоком.
Особенно предпочтительно, если клапан шлюза отделяет первую соединительную область от второй соединительной области, и этот клапан шлюза при соединении стерильного блока со второй соединительной областью автоматически открывается. При отделении стерильного блока от второй соединительной области клапан шлюза автоматически закрывается. Благодаря этому возможно простое и надежное отгораживание нестерильных элементов блока связи, так что предотвращается бактериальное загрязнение стерильной зоны нестерильными элементами блока связи. При этом предпочтительно, если клапан шлюза при соединении стерильного блока со второй соединительной областью автоматически деблокируется, а при отделении стерильного блока от второй соединительной области этот клапан шлюза автоматически блокируется. Благодаря этому обеспечивается надежное отгораживание нестерильных элементов блока связи. Таким образом эффективно предотвращается непреднамеренное открытие клапана шлюза, например, прикосновением.
Далее, предпочтительно, если стерильный клапан стерильного блока отгораживает указанное по меньшей мере одно второе передающее средство, и этот стерильный клапан автоматически открывается при соединении стерильного блока со второй соединительной областью, а также если стерильный клапан при отделении стерильного блока от второй соединительной области автоматически закрывается. Благодаря этому имеющее риск бактериального загрязнения второе передающее средство надежно стерильно отгораживается, если указанный стерильный блок был снова отделен от стерильного шлюза.
Далее, предпочтительно, если стерильный клапан при соединении стерильного блока со второй соединительной областью автоматически деблокируется, и, если этот стерильный клапан при отделении стерильного блока от второй соединительной области автоматически блокируется. За счет такого автоматического блокирования и деблокирования просто предотвращается непреднамеренный контакт со вторыми передающими средствами стерильного блока, которые бактериально загрязнены вследствие возможного контакта между первым передающим средством и вторым передающим средством, поскольку эти вторые передающие средства отгораживаются с помощью стерильного клапана, а он надежно заблокирован, так что непреднамеренный контакт с вторым передающим средством после отделения стерильного блока от стерильного шлюза невозможен.
Далее, предпочтительно, если при соединении стерильного блока со второй соединительной областью стерильная внешняя сторона стерильного клапана находится противоположно стерильной внешней стороне клапана шлюза, обращенной к этой второй соединительной области, когда и стерильный клапан, и клапан шлюза открыты. Особенно предпочтительно, если эти стерильные внешние стороны стерильного клапана и клапана шлюза в открытом состоянии обращены друг к другу, предпочтительно касаются друг друга. Благодаря такому противолежащему расположению стерильной внешней стороны клапана шлюза и стерильной внешней стороны стерильного клапана бактериальное загрязнение внешних сторон соответствующих клапанов невозможно, поскольку только внутренние стороны могут быть бактериально загрязнены посредством контакта по меньшей мере с одним нестерильным передающим элементом.
Особенно предпочтительно, если стерильный блок является компонентом хирургического аппарата, причем стерильный блок расположен, в частности, на дистальном конце хирургического аппарата.
Особенно предпочтительно, если стерильный чехол и/или стерильный шлюз выполнены из полиэтилена, полиуретана и/или поликарбоната. Благодаря этому возможно как простое изготовление чехла или, соответственно, стерильного шлюза, так и простое и безопасное манипулирование этим чехлом и стерильным шлюзом.
Хирургический инструмент содержит предпочтительно по меньшей мере один вводимый в отверстие в теле пациента рабочий орган, например, зажим, ножницы, захват, иглодержатель, микродиссектор, кламмерное устройство, устройство для наложения скоб, промывочное и/или отсасывающее устройство, режущую поверхность, зонд для прижиганий, катетер и/или всасывающий наконечник. Благодаря этому такой хирургический инструмент может по выбору иметь различные рабочие органы, которые могут использоваться для распространенных минимально инвазивных вмешательств, в частности, при лапароскопической хирургии. Однако, могут применяться и другие хирургические инструменты дополнительно или альтернативно. В частности, этот хирургический инструмент может представлять собой также оптический хирургический инструмент, например, эндоскоп, который может иметь дополнительные оптические и электрические передающие средства или интерфейсы, например, электрические контакты для управления камерой или для передачи видеоданных оптических световолоконных соединений, в частности, для освещения.
Второй аспект касается системы для робот-ассистированной хирургии, в частности, для робот-ассистированного дистанционно-управляемого проведения процедуры внутри стерильного поля с помощью стерильного хирургического инструмента. Такая система содержит по меньшей мере одно устройство согласно независимому пункту 1 формулы изобретения или согласно одной из описанных выше модификаций; устройство визуализации, которое выдает по меньшей мере одно изображение операционного поля, в котором может находиться рабочий орган хирургического инструмента, в режиме реального времени, предпочтительно в виде последовательности изображений, и по меньшей мере одно устройство для введения по меньшей мере одной команды ввода. Указанная система содержит, далее, блок управления, который с помощью по меньшей мере одного приводного блока позиционирует роботизированную руку и стерильный блок, соединенный через стерильный шлюз с блоком связи роботизированной руки, в зависимости от команды ввода. Благодаря этому возможно простое управление роботизированной рукой для позиционирования стерильного блока и/или выполнения действия оператора для управления этим стерильным блоком. Предпочтительно блок ввода содержит исполнительный элемент, приводимый в действие оператором, например, хирургом, причем блок ввода определяет изменение пространственного положения исполнительного элемента и вырабатывает команду ввода, соответствующую этому установленному изменению пространственного положения. Блок управления в зависимости от команды ввода вырабатывает по меньшей мере одну управляющую команду, которая вызывает такое же или пропорционально уменьшенное изменение пространственного положения по меньшей мере одного конца стерильного блока и/или хирургического инструмента, на дистальном конце которого расположен этот стерильный блок, и/или которая вызывает приведение в действие хирургического инструмента или редуцированное управление хирургическим инструментом, на дистальном конце которого расположен этот стерильный блок. Благодаря этому возможно простое позиционирование и/или приведение в действие хирургического инструмента оператором, находящимся удаленно от пациента в операционной или вне операционной. Вывод изображения в режиме реального времени представляет собой непосредственный вывод изображения, зарегистрированного с помощью устройства для регистрации и предварительной обработки изображения, предпочтительно в форме видеоряда, однако без задержек, вызываемых запаздыванием из-за обработки изображения.
Далее, предпочтительно, если эта система содержит несколько устройств для робот-ассистированной хирургии согласно независимому пункту 1 формулы изобретения или согласно одной из описанных выше модификаций. Указанный блок ввода содержит предпочтительно по меньшей мере два исполнительных элемента, приводимых в действие оператором, причем этот блок ввода регистрирует изменение пространственного положения каждого исполнительного элемента и вырабатывает по одной команде ввода, соответствующей каждому зарегистрированному изменению пространственного положения. Блок управления в зависимости от каждой команды ввода вырабатывает по меньшей мере по одной управляющей команде, которая вызывает такое же или пропорционально уменьшенное/увеличенное изменение пространственного положения по меньшей мере одного конца хирургического инструмента, на дистальном конце которого расположен стерильный блок, или устройства для робот-ассистированной хирургии, связанного с соответствующим исполнительным элементом в момент приведения в действие, и/или которая вызывает приведение в действие хирургического инструмента или масштабированное управление этим хирургическим инструментом. Благодаря этому операция может проводиться несколькими инструментами, которые одновременно находятся в операционном поле или, соответственно, которые при лапароскопических вмешательствах одновременно находятся в брюшной полости пациента.
Третий аспект данного изобретения касается стерильного шлюза, который, в частности, пригоден для применения в устройстве для робот-ассистированной хирургии согласно независимому пункту 1 формулы изобретения или согласно одной из модификаций этого устройства. Стерильный шлюз имеет первую соединительную область для соединения стерильного блока с нестерильным блоком связи и вторую соединительную область для соединения стерильного шлюза с расположенным в стерильной зоне стерильным блоком. Стерильный шлюз имеет также окружную третью соединительную область для соединения стерильного шлюза с гибким стерильным чехлом для отделения стерильной зоны от нестерильной зоны. Далее, стерильный шлюз имеет по меньшей мере один клапан шлюза, который в закрытом состоянии стерильно закрывает отверстие между первой соединительной областью и второй соединительной областью, а в открытом состоянии освобождает это отверстие между первой соединительной областью и второй соединительной областью. Посредством такого стерильного шлюза обеспечивается простое манипулирование стерильным блоком при соединении с блоком связи, причем стерильно отгораживаются нестерильные передающие средства этого блока связи, а также возможно простое непосредственное соединение первого передающего средства, расположенного в блоке связи, с вторым передающим средством, расположенным в стерильном блоке. В частности, приводные элементы блока связи и приводимые элементы стерильного блока при открытом клапане шлюза могут находиться в непосредственном зацеплении друг с другом.
Особенно предпочтительно, если стерильный шлюз может быть соединен со стерильным блоком и с блоком связи таким образом, что по меньшей мере один приводной элемент блока связи, служащий в качестве первого передающего средства, может находиться механически в непосредственном зацеплении по меньшей мере с одним приводным элементом стерильного блока, служащим в качестве второго передающего средства. За счет этого непосредственного механического зацепления могут передаваться моменты от приводного элемента к приводимому элементу, так что возможная простая передача моментов между нестерильной зоной и стерильной зоной сквозь стерильный шлюз без промежуточного включения дополнительных передающих средств. Таким образом, дополнительные передающие средства для соединения приводных элементов и приводимых элементов не требуются. Такие передающие средства подвержены сбоям в работе, а их интегрирование в стерильный чехол является довольно трудоемким.
Особенно предпочтительно, если третья соединительная область стерильного шлюза располагается на внешней стороне стерильного шлюза между первой соединительной областью и второй соединительной областью. В частности, третья соединительная область расположена, проходя вокруг по боковой поверхности стерильного шлюза. Соединение между стерильным шлюзом и материалом стерильного гибкого чехла при этом может быть осуществлено с помощью зажимного соединения, соединения типа «липучки», сварного и/или клеевого соединения. Благодаря этому стерильный гибкий материал чехла может простым образом соединяться с внешней стороной стерильного шлюза, так что материал чехла вместе со стерильным шлюзом образует сплошной стерильный чехол.
Для образования зажимного соединения третья соединительная область может быть выполнена как зона зажима, так что гибкий материал чехла может быть соединен с зажимными элементами третьей соединительной области. Альтернативно или дополнительно третья соединительная область может быть выполнена как клеевая область, посредством которой стерильный гибкий материал чехла с помощью клея может быть соединен с этой третьей соединительной областью. Альтернативно или дополнительно стерильный гибкий материал чехла может быть соединен с третьей соединительной областью сварным соединением.
Далее, предпочтительно, если клапан шлюза при соединении стерильного блока с первой соединительной областью автоматически открывается, а стерильный шлюз при отделении блока управления от первой соединительной области автоматически снова закрывает этот клапан шлюза. Открытие и закрытие клапана шлюза при этом происходит предпочтительно механически, причем клапан шлюза может открываться против действия упругой силы и закрываться под действием этой упругой силы. Предпочтительно клапан шлюза в закрытом состоянии заблокирован, так что он не может открыться под воздействием на него силы. Благодаря этому возможно простое и надежное манипулирование стерильным шлюзом. В частности, нестерильные зоны блока связи с помощью клапана шлюза закрываются, когда стерильный блок не соединен со стерильным шлюзом.
Четвертый аспект данного изобретения касается робот-ассистированного хирургического способа, в частности, с использованием устройства согласно независимому пункту 1 формулы изобретения или одной из вышеописанных модификаций, с использованием системы согласно второму аспекту данного изобретения или одной из модификаций этой системы, или с использованием стерильного шлюза согласно третьему аспекту данного изобретения или приведенной модификации этого стерильного шлюза. При этом способе расположенная в нестерильной зоне роботизированная рука с помощью стерильного чехла и интегрированного в этот чехол стерильного шлюза отгораживается от стерильной зоны. Нестерильный блок связи роботизированной руки соединяется с первой соединительной областью стерильного шлюза. Отверстие между первой соединительной областью и второй соединительной областью стерильного шлюза закрывается с помощью клапана шлюза. Клапан шлюза при соединении расположенного в стерильной зонестерильного блока со второй соединительной областью стерильного шлюза автоматически открывается, так что при открытом клапане шлюза возможна непосредственная передача между указанным первым передающим средством и вторым передающим средством стерильного блока. За счет открытия клапана шлюза открывается отверстие между первой соединительной областью и второй соединительной областью.
Клапан шлюза при отделении стерильного блока от второй соединительной области автоматически закрывается, за счет чего отверстие между первой соединительной областью и второй соединительной областью снова стерильно закрывается. При соединении указанного стерильного блока, находящегося в стерильной зоне, или дополнительного стерильного блока, находящегося в стерильной зоне, со второй соединительной областью стерильного шлюза клапан шлюза снова автоматически открывается, так что снова возможна непосредственная передача между первым передающим средством и вторым передающим средством или еще одним вторым передающим средством указанного дополнительного стерильного блока. Благодаря этому возможно простое соединение между блоком связи и стерильным блоком, причем стерильный блок в случае необходимости может многократно отделяться от стерильного шлюза, не вызывая при этом бактериального загрязнения стерильной зоны. Это обеспечивается даже в том случае, если второе передающее средство было бактериально загрязнено, в частности, посредством контакта с первым передающим средством.
В частности, в том случае, если стерильный блок используется лишь один раз, он не должен обязательно иметь стерильный клапан. Стерильный блок в таком случае после отделения от стерильного шлюза во время операции немедленно удаляется из стерильной зоны.
Однако, предпочтительно, если стерильный блок имеет по меньшей мере один стерильный клапан, который в закрытом состоянии стерильно отгораживает второе передающее средство. Клапан шлюза и стерильный клапан при соединении стерильного блока со стерильным шлюзом перемещаются каждый из своего закрытого состояния в открытое состояние, так что становится возможной непосредственная передача между первым передающим средством и вторым передающим средством через отверстие, освобождаемое стерильным клапаном и клапаном шлюза в открытом состоянии. При отделении стерильного блока от стерильного шлюза указанные клапан шлюза и стерильный клапан движутся каждый из своего открытого состояния в закрытое состояние, так что после отделения первое передающее средство с помощью клапана шлюза, и второе передающее средство с помощью стерильного клапана оказываются отгорожены от стерильной зоны.
При этом предпочтительно, если указанное отверстие стерильного блока закрывается стерильным клапаном в его закрытом состоянии таким образом, что второе передающее средство находится позади стерильного клапана, и, если стерильный клапан при соединении со стерильным шлюзом открывается таким образом, что возможен доступ к второму передающему средству. Предпочтительно стерильный клапан при соединении стерильного блока со второй соединительной областью стерильного шлюза открывается автоматически. При отделении стерильного блока от второй соединительной области стерильного шлюза этот стерильный клапан автоматически закрывается. Благодаря этому возможно безопасное манипулирование стерильным блоком и стерильным шлюзом вместе с нестерильным блоком связи.
Далее, предпочтительно, если первое передающее средство содержит по меньшей мере один приводной элемент, а второе передающее средство содержит по меньшей мере один приводимый элемент. Во время соединения стерильного блока со второй соединительной областью стерильного шлюза клапан шлюза стерильного шлюза и стерильный клапан стерильного блока открываются таким образом, что во время соединения стерильного блока со второй соединительной областью приводной элемент приводится в непосредственное зацепление с приводимым элементом. Это происходит, в частности, без промежуточного включения дополнительных передающих средств, в частности, без промежуточного включения подвижных передающих средств, так что надежно предотвращается бактериальное загрязнение по меньшей мере внешней стороны стерильного блока, благодаря чему он и после отделения от стерильного шлюза может просто оставляться в стерильной зоне.
При этом нельзя считать недостатком, если стерильный приводимый элемент при первом контакте с приводным элементом бактериально загрязнится, поскольку этот бактериально загрязненный приводимый элемент во время отделения стерильного блока от второй соединительной области стерильно отгораживается стерильным клапаном. Предпочтительно при отделении стерильного блока от первой соединительной области как клапан шлюза, так и стерильный клапан закрываются и предпочтительно блокируются таким образом, что оказываются стерильно отгороженными по одной области доступа к приводному элементу и к приводимому элементу. Предпочтительно стерильный клапан и клапан шлюза в закрытом состоянии механически заблокированы, так что ни клапан шлюза, ни стерильный клапан не могут быть открыты вручную. Благодаря этому обеспечивается стерильное ограждение от нестерильных или бактериально загрязненных элементов блока связи и стерильного блока, так что стерильная зона и после отделения стерильного блока от стерильного шлюза не загрязняется бактериально.
Таким образом, предлагаемый изобретением способ обеспечивает простое и безопасное манипулирование, в частности, простую и безопасную замену стерильного блока, в частности, содержащего этот стерильный блок инструментального блока с хирургическим инструментом во время хирургического вмешательства.
Во всех вариантах осуществления и модификациях изобретения стерильный шлюз может иметь два клапана шлюза, а стерильный блок - два стерильных клапана.
Стерильный шлюз во всех описанных вариантах осуществления не является компонентом функциональной цепи для передачи электрической энергии, электрических или оптических сигналов и/или механической энергии между роботизированной рукой и стерильным блоком. Более того, стерильный шлюз может содержать твердую формованную деталь и клапанную систему шлюза, включающую по меньшей мере указанный клапан шлюза и отгораживающую нестерильные первые передающие средства блока связи таким образом, что она и весь блок связи после установки стерильного чехла со стерильным шлюзом стерильно отгораживаются от стерильного окружающего пространства. Механизм открытия клапанной системы шлюза при этом предпочтительно конструктивно выполнен таким образом, что он не может быть открыт снаружи за счет непреднамеренного приведения в действие. Кроме того, вторые передающие средства тоже стерильно закрываются стерильным корпусом стерильного блока и по меньшей мере одним стерильным клапаном стерильного блока. Эти вторые передающие средства содержат, в частности, по меньшей мере один приводимый элемент, предпочтительно по меньшей мере один приводимый элемент для восприятия вращательных и/или поступательных управляющих усилий. Предпочтительно предусмотрен по меньшей мере один приводимый элемент для восприятия вращательных управляющих усилий и один приводимый элемент для восприятия поступательных управляющих усилий.
Дополнительно может быть предусмотрено по меньшей мере одно электрическое соединение для передачи высокочастотной энергии для высокочастотной хирургии. Особенно предпочтительно, если указанный стерильный блок имеет по меньшей мере два приводимых элемента для восприятия вращательных управляющих усилий и два приводимых элемента для восприятия поступательных управляющих усилий. Блок связи роботизированной руки в таком случае в качестве первых передающих средств имеет два приводных блока для создания вращательных управляющих усилий, каждый из которых находится в непосредственном контакте с выступающими в качестве вторых передающих средств ответными приводимыми элементами для восприятия вращательных управляющих усилий стерильного блока. Кроме того, указанный блок связи в качестве первых передающих средств имеет два приводных элемента для создания поступательных управляющих усилий, которые находятся в непосредственном контакте с выступающими в качестве вторых передающих средств приводимыми элементами для восприятия поступательных управляющих усилий. Содержащий такой стерильный блок хирургический инструмент представляет собой, в частности, лапароскопический инструмент.
Предпочтительно механизмы открытия стерильной клапанной системы и/или клапанной системы шлюза конструктивно выполнены таким образом, что они не могут приводиться в действие снаружи вследствие непреднамеренного манипулирования, но срабатывают только при корректном соединении стерильного блока со стерильным шлюзом. Механизмы открытия стерильной клапанной системы и клапанной системы шлюза предпочтительно конструктивно выполнены таким образом, что при соединении стерильного блока со стерильным шлюзом указанные клапаны клапанной системы шлюза и стерильной клапанной системы автоматически деблокируются и открываются с помощью соответствующих запирающих элементов. Тем самым выступающие в качестве передающих средств приводные элементы и приводимые элементы, а также электрические контактные элементы могут приводиться друг с другом в непосредственное зацепление или, соответственно, в контакт друг с другом. Таким образом создается непосредственное соединение между нестерильными приводными элементами блока связи и приводимыми элементами стерильного блока хирургического инструмента. Вследствие этого может происходить бактериальное загрязнение прежде стерильных приводимых элементов стерильного блока.
Если стерильный блок снова отделяется от стерильного шлюза, то, как клапаны клапанной системы стерильного шлюза, так и стерильный клапан стерильной клапанной системы стерильного блока снова закрываются, в частности, прежде, чем стерильный блок будет полностью извлечен из стерильного шлюза. Тем самым обеспечивается, что ни в какой момент времени как нестерильные части блока связи, так и больше нестерильные приводимые элементы стерильного блока, и/или электрические контакты стерильного блока не смогут войти в контакт со стерильным операционным полем и средой, окружающей пациента, и бактериально загрязнить их. Благодаря этому стерильный блок с закрытой стерильной клапанной системой может оставаться непосредственно в стерильной среде, окружающей пациента, и таким образом держаться наготове вплоть до нового применения, т.е. вплоть до нового соединения с первой соединительной областью стерильного шлюза, не приводя к бактериальному загрязнению стерильной среды, окружающей пациента.
Выступающие в качестве первых передающих средств приводные элементы и выступающие в качестве вторых передающих средств приводимые элементы предпочтительно выполнены таким образом, что лапароскопический хирургический инструмент может перемещаться с четырьмя степенями свободы, а именно:
1. вращение хвостовика инструмента
2. вращение головки инструмента независимо от хвостовика инструмента
3. отклонение головки инструмента относительно хвостовика инструмента
4. управление хирургическим инструментом, в частности, для создания относительного движения двух установленных подвижно относительно друг друга элементов, например, захватное движение головки инструмента или лезвий ножниц.
Стерильный корпус стерильного блока во время соединения со стерильным шлюзом предпочтительно вдавливается в приемную область второй соединительной области и с помощью механической защелки фиксируется на стерильном шлюзе от непреднамеренного отсоединения. Эта механическая защелка создает, тем самым, фиксирующее соединение между стерильным шлюзом и стерильным блоком. Для отделения стерильного блока от стерильного шлюза вручную приводится в действие кнопка разблокировки, так что стерильный блок отделяется от второй соединительной области, предпочтительно может быть извлечен из приемной области второй соединительной области.
В качестве проксимального в общем считается обращенный к пациенту конец любого элемента. В качестве дистального в общем считается обращенный от пациента конец элемента.
Другие признаки и преимущества вытекают из нижеследующего описания, в котором данное изобретение разъясняется подробнее на примерах осуществления с отсылкой на прилагаемые чертежи.
На чертежах показано следующее:
Фиг. 1 схематичное изображение системы для робот-ассистированной хирургии с манипулятором, имеющим четыре роботизированные руки, с каждой из которых может быть соединен стерильный блок инструментального блока;
Фиг. 2 вид спереди манипулятора по Фиг. 1;
Фиг. 3 вид в изометрии участка роботизированной руки с блоком связи для соединения этой роботизированной руки с инструментальным блоком, содержащим стерильный блок, с соединенным с этим блоком связи стерильным шлюзом и со стерильным блоком инструментального блока, связанным с этим стерильным шлюзом;
Фиг. 4 другой вид в изометрии конструкции по Фиг. 3;
Фиг. 5 устройство для соединения инструментального блока, расположенного в стерильной зоне, с нестерильным блоком связи роботизированной руки;
Фиг. 6 схематичное изображение блока связи роботизированной руки;
Фиг. 7 продольное сечение блока связи по Фиг. 6;
Фиг. 8 вид в изометрии стерильного шлюза с закрытыми и заблокированными стерильными клапанами;
Фиг. 9 вид в изометрии стерильного шлюза по Фиг. 8 с открытыми стерильными клапанами;
Фиг. 10 частично вырезанный вид сбоку стерильного шлюза;
Фиг. 11 вид в разрезе стерильного шлюза по Фиг. 10, сечение по A-A;
Фиг. 12 вид в разрезе стерильного шлюза по Фиг. 10, сечение по B-B;
Фиг. 13 вид в разрезе стерильного шлюза по Фиг. 10, сечение по C-C;
Фиг. 14 укрупненный вид с частично открытыми стерильными клапанами и с направляющей вилкой, находящейся в зацеплении с этими стерильными клапанами;
Фиг. 15 вид в изометрии инструментального блока с открытыми стерильными клапанами стерильного блока;
Фиг. 16 вид в изометрии инструментального блока по Фиг. 15 с закрытыми стерильными клапанами;
Фиг. 17 вид сбоку инструментального блока;
Фиг. 18 вид в разрезе инструментального блока по Фиг. 17, сечение по E-E;
Фиг. 19 вид в разрезе инструментального блока по Фиг. 17, сечение по F-F;
Фиг. 20 фрагмент вида снизу инструментального блока с закрытыми и заблокированными стерильными клапанами;
Фиг. 21 фрагмент инструментального блока по Фиг. 20 с разблокированными и открытыми стерильными клапанами;
Фиг. 22 вид сверху стерильной клапанной системы стерильного блока с закрытыми стерильными клапанами,
Фиг. 23 вид в разрезе стерильной клапанной системы по Фиг. 22, сечение по G-G;
Фиг. 24 вид сверху стерильной клапанной системы по Фиг. 22 и 23 с открытыми стерильными клапанами;
Фиг. 25 вид в разрезе стерильной клапанной системы по Фиг. 24, сечение по H-H;
Фиг. 26 в изометрии, укрупненный вид стерильного клапана с направляющей заслонкой стерильного блока;
Фиг. 27 вид сверху направляющей заслонки и стерильного клапана по Фиг. 26 в заблокированном состоянии;
Фиг. 28 вид сверху стерильного клапана и направляющей заслонки в разблокированном состоянии;
Фиг. 29 вид в изометрии стерильного клапана и направляющей заслонки в открытом состоянии;
Фиг. 30 частично вырезанное изображение системы со стерильным блоком и стерильным шлюзом в соединенном состоянии;
Фиг. 31 вид в разрезе системы по Фиг. 30, сечение по I-I;
Фиг. 32 вид в разрезе системы по Фиг. 30, сечение по J-J,
Фиг. 33 вид в разрезе системы по Фиг. 30, сечение по K-K;
Фиг. 34 вид в разрезе системы по Фиг. 30, сечение по L-L;
Фиг. 35 элементы стерильной клапанной системы стерильного блока и клапанной системы стерильного шлюза системы по Фиг. 30-34;
Фиг. 36 вид сбоку системы по Фиг. 30-35;
Фиг. 37 вид в разрезе участка системы по Фиг. 36, сечение по M-M;
Фиг. 38 вид в разрезе системы по Фиг. 36, сечение по N-N;
Фиг. 39 вид сверху узла из блока связи, стерильного шлюза и инструментального блока;
Фиг. 40 вид в разрезе системы по Фиг. 39, сечение по O-O, в первом положении для соединения инструментального блока со стерильным шлюзом, соединенным с блоком связи;
Фиг. 41 вид в разрезе системы по Фиг. 39, сечение по O-O, во втором положении для соединения инструментального блока со стерильным шлюзом, соединенным с блоком связи;
Фиг. 42 вид в разрезе системы по Фиг. 39, сечение по O-O, в третьем положении для соединения инструментального блока со стерильным шлюзом, соединенным с блоком связи;
Фиг. 43 фрагмент инструментального блока согласно второму варианту выполнения;
Фиг. 44 стерильный чехол со стерильным шлюзом согласно второму варианту выполнения;
Фиг. 45 фрагмент инструментального блока согласно третьему варианту выполнения; и
Фиг. 46 стерильный чехол со стерильным шлюзом согласно третьему варианту выполнения.
На Фиг. 1 показано схематичное изображение системы 10 для робот-ассистированной хирургии с манипулятором 12, имеющим штатив 14 и четыре роботизированные руки 16a-16d. В других примерах осуществления манипулятор 12 может иметь большее или меньшее число роботизированных рук 16a-16d. Каждая роботизированная рука 16a-16d соединена с одним стерильным инструментальным блоком 300a-300d через соответствующий блок связи роботизированной руки 16a-16d. Инструментальные блоки 300a-300d являются стерильными и помимо стерильного блока для подсоединения инструментального блока 300a-300d с блоком связи роботизированной руки 16a-16d содержат хирургический инструмент, в частности, с рабочим органом, причем это рабочий орган может двигаться и/или управляться с помощью блока связи роботизированной руки 16a-16d. В качестве альтернативы хирургическому инструменту указанный инструментальный блок 300a-300d может содержать также оптический инструмент, в частности, эндоскоп, и/или медицинский прибор, в частности, для нанесения медикамента, для выдачи промывочной жидкости и/или для отсасывания промывочной жидкости и/или секрета.
Штатив 14 имеет ножку 24 штатива, стоящую на полу операционной. Роботизированные руки 16a-16d соединены с головкой 20 штатива 14. В других вариантах выполнения штатив может быть также потолочным штативом.
Положение головки 20 штатива устанавливается с помощью первого приводного блока 22 и расположенного в ножке 24 штатива второго приводного блока 26. С помощью приводного блока 22 плечи 28, 30 штатива могут двигаться относительно друг друга. С помощью приводного блока 26 может изменяться наклон плеча 30 штатива относительно установочной поверхности ножки 24 штатива, и/или плечо 30 штатива может поворачиваться относительно вертикальной оси вращения. В общем позиционирование головки 20 штатива производится перед операцией пациента. Во время операции положение головки 20 штатива относительно стойки 32 операционного стола 34 обычно остается неизменным. Манипулятор 12 управляется с помощью блока 36 управления. Блок 36 управления посредством линии для передачи данных и/или управления соединен с блоком 37 ввода и вывода, который, в частности, выдает оператору изображение операционного поля в режиме реального времени с помощью по меньшей мере одного устройства визуализации. Оператор осуществляет ввод данных управления, посредством которых инструментальные блоки 300a-300d во время операции пациента позиционируются и приводятся в действие. Блок 37 ввода и вывода служит, таким образом, в качестве интерфейса человек - машина.
Блок 36 управления посредством соединения для управления и/или передачи данных соединен с не представленным блоком управления операционного стола 34. С помощью этого соединения для управления и/или передачи данных гарантируется, что положение опорной поверхности для пациента или сегментов этой опорной поверхности для пациента операционного стола 34 может быть изменено только в том случае, если это может быть осуществлено за счет позиционирования инструментальных блоков 300a-300d безопасно для оперируемого пациента.
Операционный стол 34, а также инструментальные блоки 300a-300d установлены в стерильной зоне 39 операции. Роботизированные руки 16a-16d и штатив 14 не стерильны. Выступающие в стерильную зону 39 операции области манипулятора 12, т.е. роботизированные руки 16a-16d, головка 20 штатива и часть плеча 28 штатива, стерильно упакованы в обозначенную пунктирной линией стерильную гибкую оболочку 38, например, стерильную пленку, так что они могут быть безопасно размещены в стерильной зоне 39 операции. Блок 37 ввода и вывода расположен снаружи стерильной зоны 39 и поэтому не должен быть стерильно упакован.
При многих операциях необходимо многократно менять инструментальные блоки 300a-300d во время операции в соответствии с ходом операции. Таким образом, между роботизированной рукой 16a-16d и инструментальным блоком 300a-300d необходимо предусмотреть стерильный интерфейс, который гарантирует, что нестерильные части блока связи роботизированной руки 16a-16d и после отделения инструментального блока 300a-300d будут стерильно отгорожены. Кроме того, элементы инструментального блока 300a-300d, бактериально загрязненные из-за контакта стерильных элементов блока связи роботизированной руки 16a-16d, после отделения инструментального блока 300a-300d от роботизированной руки 16a-16d должны быть стерильно отгорожены, чтобы этот инструментальный блок 300a-300d можно было оставить в стерильной зоне 39, не подвергая бактериальному загрязнению другие элементы в стерильной зоне 39. Согласно изобретению между блоком связи роботизированной руки 16a-16d и инструментальным блоком 300a-300d предусматривается стерильный шлюз, который имеет по меньшей мере один клапан шлюза, который закрыт, когда ни один из инструментальных блоков 300a-300d не соединен со стерильным шлюзом, так что в этом случае нестерильный блок связи отгорожен от стерильной зоны 39 с помощью гибкой стерильной оболочки 38 и интегрированного в нее стерильного шлюза. Конструкция и функционирование стерильного шлюза еще будут пояснены ниже в связи с Фиг. 3-42.
На Фиг. 2 показан вид спереди манипулятора 12 по Фиг. 1. Каждая роботизированная рука 16a-16d манипулятора 12 имеет несколько сегментов 40a-58a, которые с помощью интегрированных приводных блоков могут двигаться относительно друг друга, так что инструментальные блоки 300a-300d могут точно позиционироваться без столкновений друг с другом. Стерильные оболочки 38 для отгораживания участка роботизированных рук 16a-16d на Фиг. 2 не представлены. Сегменты роботизированной руки 16a обозначены ссылочными позициями 40a-58a. Другие роботизированные руки 16b-16d имеют такую же конструкцию, и их сегменты обозначены ссылочными позициями 40b-58b, 40c-58c и 40d-58d соответственно, которые из соображений наглядности на Фиг. 2 не показаны. Одинаковые элементы роботизированных рук 16a-16d обозначены теми же цифрами, но буквы при этих цифрах для различения указываются соответственно роботизированным рукам 16a-16d. Приведенные в нижеследующем описании разъяснения касаются роботизированной руки 16a и инструментального блока 300a, которые в дальнейшем обозначены как роботизированная рука 16 и инструментальный блок 300. Сегменты 40a-58a роботизированной руки 16a в дальнейшем обозначены как сегменты 40-58. Приводимые разъяснения в равной мере справедливы, однако, для роботизированных рук 16b-16d и инструментальных блоков 300b-300d, сконструированных таким же образом. Элементы одинаковой конструкции и/или с одинаковыми функциями обозначены одинаковыми ссылочными позициями.
На Фиг. 3 показан вид в изометрии участка роботизированной руки 16 с блоком 100 связи для соединения этой роботизированной руки 16 с инструментальным блоком 300, содержащим стерильный блок 400. Для этого блок 100 связи соединен со стерильным шлюзом 200, интегрированным в стерильную оболочку 38. Стерильный шлюз 200 может быть соединен как с блоком 100 связи, так и со стерильным блоком 400, а также может от них отделяться. На Фиг. 3 представлен стерильный шлюз 200, связанный как с блоком 100 связи, так и со стерильным блоком 400. Блок 100 связи расположен на дистальном конце телескопического устройства 60.
Телескопическое устройство 60 содержит перемещаемые относительно друг друга участки 62, 64, 66 и на Фиг. 3 представлен в раздвинутом состоянии. Участки 62, 64, 66 телескопического устройства 60 с помощью приводного блока 68 могут вдвигаться и раздвигаться, так что хирургический инструмент 500 инструментального блока 300 может двигаться вдоль продольной оси 510 хвостовика 512 инструмента вместе с блоком 100 связи, стерильным шлюзом 200 и стерильным блоком 400. С помощью интегрированного в сегмент 52 приводного блока сегмент 54 может поворачиваться вместе с выполненным в виде шарнирно-сочлененной руки сегментом 56 вокруг оси вращения 57. Сегмент 58 через соединительный механизм 59 соединен с сегментом 56, так что сегмент 58 после активации приводного блока, связанного с соединительным механизмом 59, может поворачиваться вокруг оси вращения 61. Далее, блок 100 связи с помощью не показанного на Фиг. 3 соединительного механизма может быть установлен с возможностью поворота относительно сегмента 66 вокруг оси вращения 67. Указанный соединительный механизм с помощью соединенного с этим соединительным механизмом приводного блока тоже может приводиться таким образом, что при активации этого приводного блока блок 100 связи поворачивается вокруг оси вращения 67. При этом указанные приводные блоки указанных соединительных механизмов управляются так, что продольная ось 510 хвостовика 512 инструмента при движении роботизированной руки 16 и ее сегментов качается вокруг фиксированной в пространстве точки качания 69, за счет чего продольная ось 510 хвостовика 512 инструмента, введенного в пациента при операции предпочтительно через троакар, поворачивается вокруг этой точки качания 69, так что будет гарантировано, что вследствие движения инструмента 500 произойдет лишь незначительное воздействие на пациента в месте входа инструмента 500 в этого пациента, в частности, предотвращается причинение вреда пациенту в месте входа хвостовика 512 инструмента.
На Фиг. 4 показан другой вид в изометрии устройства по Фиг. 3, причем участки 62, 64, 66 телескопического устройства 60 в отличие от Фиг. 3 представлены во вдвинутом состоянии, вследствие чего инструментальный блок 300 сдвинут в направлении продольной оси 510 хвостовика 512 инструмента к проксимальному концу хирургического инструмента 500. Таким образом, путем вдвигания телескопического устройства 60 инструментальный блок 300 сдвинут в направлении проксимального конца инструмента 500 вдоль продольной оси 510 инструмента 500. Однако, при этом положение точки качания 69 остается неизменным. При повороте сегментов 56, 58, 60 вокруг оси вращения 57 точка качания 69 за счет соответствующего управления приводными блоками соединительных механизмов 59 остается неизменной в своем пространственном положении, в котором происходит соответствующее вращение сегмента 60 вокруг оси вращения 61 и блока 100 связи вокруг оси вращения 67. Далее, создаваемая за счет соответствующего привода соединительного механизма виртуальная ось вращения (не показана), параллельная осям вращения 61, 67 и перпендикулярная оси вращения 57, проходит через точку качания 69.
В этой точке качания 69 пересекаются ось вращения 57 выполненного в виде шарнирно-сочлененной руки сегмента 56 и продольная ось 510 инструмента 500. Точка качания 69 обозначается также как ключевая точка.
На Фиг. 5 показан блок 100 связи, стерильный шлюз 200, а также инструментальный блок 300 со стерильным блоком 400 и хирургическим инструментом 500, имеющим рабочий орган 514, перед состыковыванием стерильного шлюза 200 с блоком 100 связи и перед последующим состыковыванием стерильного блока 400 со стерильным шлюзом 200. Выполненная в виде стерильной пленки гибкая стерильная оболочка 38 по окружному присоединительному краю 202 стерильного шлюза 200 прочно соединена с ним подходящим соединением, например, зажимным, клеевым и/или сварным соединением, так что эта стерильная пленка 38 вместе со стерильным шлюзом 200 образует замкнутый стерильный чехол вокруг стерильной зоны 39, отгораживающий нестерильные элементы 16, 100, как это показано и на Фиг. 1, 3 и 4. Для лучшей наглядности на Фиг. 5 представлен вырез в стерильной пленке 38 вокруг стерильного шлюза 200. На остальных фигурах стерильная пленка 38 частично не показана.
Для связывания стерильного блока 400 с блоком 100 связи между стерильным блоком 400 и блоком 100 связи расположен стерильный шлюз 200, который в соединенном состоянии стерильного блока 400 с блоком 100 связи обеспечивает непосредственное соединение первого передающего средства 102 блока 100 связи и второго передающего средства стерильного блока 400. Второе передающее средство на Фиг. 15 снабжено ссылочной позицией 406.
С помощью первого передающего средства 102 в данном примере осуществления между блоком 100 связи и стерильным блоком 400 передается как механическая энергия, так и электрическая энергия. Для этого первое передающее средство 102 блока 100 связи содержит по меньшей мере четыре механических приводных элемента 110-116, а второе передающее средство 406 стерильного блока 400 содержит четыре показанных на Фиг. 15 приводимых элемента 412-418, +ответных для этих приводных элементов 110-116. Кроме того, первое передающее средство 102 содержит электрический передающий элемент 104 с двумя электрическими контактами 106, 108, а второе передающее средство 406 содержит электрический передающий элемент, ответный для электрического передающего элемента 104 первого передающего устройства 102. Этот ответный электрический передающий элемент содержит два электрических контакта 422, 423, показанных на Фиг. 15.
В других примерах осуществления эти первые и вторые передающие средства могут также иметь больше или меньше приводных элементов, приводимых элементов и электрических передающих элементов, обеспечивающих передачу механической и/или электрической энергии путем непосредственного соединения. При этом в качестве непосредственного соединения принимается соединение передающих средств, при котором между первыми передающими средствами и вторыми передающими средствами не предусмотрено никаких дополнительных передающих элементов для передачи механической и/или электрической энергии, и/или оптических лучей, причем, в частности, не предусмотрено никаких электрических, механических или оптических передающих элементов в расположенном между блоком 100 связи и стерильным блоком 400 стерильном барьере, таком как стерильный шлюз 200. Блок 100 связи содержит также RFID-считывающее и записывающее устройство 121, с помощью которого возможно считывание и запись в RFID-транспондере 494 стерильного блока 400.
На Фиг. 6 показан схематичный вид в изометрии блока 100 связи роботизированной руки 16. Первое передающее средство 102 этого блока 100 связи содержит электрический передающий элемент 104 с двумя электрическими контактами 106, 108, оптическое передающее средство 109 для передачи света и/или оптических сигналов, первый приводной элемент 110 поступательного движения и второй приводной элемент 112 поступательного движения, каждый из которых предназначен для передачи поступательного движения, а также первый вращательный приводной элемент 114 и второй вращательный приводной элемент 116 для передачи вращательного движения. Эти первый и второй приводные элементы 110, 112 поступательного движения выполнены каждый в виде вилки линейного хода, а первый и второй вращательные приводные элементы 114, 116 выполнены в виде ведущих шестеренок с торцевыми зубьями. Далее, указанный блок 100 связи имеет установленный в углублении первый датчик 118 связи, который детектирует первый детектирующий элемент, образованный выступающим из стерильного блока 400 первым индикационным штифтом, если стерильный шлюз 200 корректно связан с блоком 100 связи, а стерильный блок 400 корректно соединен со стерильным шлюзом 200. В этом случае первый индикационный штифт стерильного блока 400 входит в углубление, в котором размещен первый датчик 118 связи, так что последний детектирует наличие первого индикационного штифта, служащего первым детектирующим элементом. Этот первый индикационный штифт показан на Фиг. 15 и обозначен там ссылочной позицией 426.
Блок 100 связи содержит второй датчик 120 связи, который размещен сбоку возле приводных элементов 112, 114 в еще одном углублении, как это ясно видно на Фиг. 5. Этот второй датчик 120 связи детектирует второй детектирующий элемент, образованный вторым индикационным штифтом стерильного блока 400, если и блок 100 связи корректно соединен со стерильным шлюзом 200, и стерильный шлюз 200 корректно соединен со стерильным блоком 400. Этот второй индикационный штифт показан на Фиг. 11 и обозначен там ссылочной позицией 428. Таким образом, с помощью датчиков 118 связи, 120 надежно устанавливается наличие корректного соединения стерильного блока 400 с блоком 100 связи, так что возможна непосредственная передача между первым передающим средством 102 блока 100 связи и вторым передающим средством стерильного блока 400. Для соединения блока 100 связи со стерильным шлюзом 200 этот блок 100 связи имеет расположенные противоположно друг другу направляющие пазы 122, 124, в которые вводятся направляющие штифты 204, 206 стерильного шлюза 200 до тех пор, пока они не дойдут до переднего конца 123, 125 соответствующих направляющих пазов 122, 124, как это показано на Фиг. 10. Направляющие штифты 204, 206 выходят на первом конце стерильного шлюза 200 наружу на противоположных сторонах, как это можно увидеть на Фиг. 5 и 10. Затем противоположный второй конец стерильного шлюза 200 прижимается вниз, так что стерильный шлюз 200 поворачивается вокруг проходящей через эти направляющие штифты 204, 206 оси вращения, пока фиксирующий носик 126 фиксирующего элемента 128 не войдет в ответную фиксирующую область стерильного шлюза 200.
На Фиг. 7 показан в продольном разрезе блок 100 связи. Фиксирующий элемент 128 установлен с возможностью поворота вокруг оси вращения 130 и удерживается пружиной 132 в показанном на Фиг. 7 фиксирующем положении. Для разъединения этого фиксирующего соединения пальцем нажимают на кнопку 134 разблокировки фиксирующего элемента 128, так что пружина 132 натягивается, и фиксирующий элемент 128 вместе с фиксирующим носиком 126 поворачивается в направлении стрелки P0, так что фиксирующий носик 126 выводится из зацепления с ответным фиксирующим элементом стерильного шлюза 200. Благодаря этому второй конец стерильного шлюза 200, прежде находившийся в зацеплении с фиксирующим носиком 126, поворачивается из блока 100 связи наружу. После того как этот второй конец стерильного шлюза 200 был повернут из блока 100 связи наружу, стерильный шлюз 200 может быть полностью отделен от блока 100 связи за счет того, что стерильный шлюз 200 с направляющими штифтами 204, 206, находящимися в зацеплении с направляющими пазами 122, 124, вытягивается из него вдоль этих направляющих пазов 122, 124 до тех пор, пока указанные направляющие элементы 204, 206 не выйдут из зацепления с направляющими пазами 122, 124. Между направляющими пазами 122, 124 и фиксирующим элементом 128 имеется образованная соответствующим углублением в корпусе блока 100 связи приемная область, которая в данном примере осуществления по меньшей мере частично окружает стерильный шлюз 200 с трех сторон и со стороны дна.
На Фиг. 8 показан вид в перспективе стерильного шлюза 200 с закрытыми клапанами 208, 210 шлюза. На Фиг. 9 показан вид в перспективе стерильного шлюза 200 с открытыми клапанами 208, 210 шлюза. Стерильный шлюз 200 имеет дно 212, в котором предусмотрены два отверстия 214, 216, закрываемых с помощью клапанов 208, 210 шлюза. Клапаны 208, 210 шлюза с помощью шарниров поворотно соединены с дном 212. С помощью этих шарниров клапаны 208, 210 шлюза из показанного на Фиг. 8 закрытого состояния могут поворачиваться в показанное на Фиг. 9 открытое состояние. В открытом состоянии клапанов 208, 210 шлюза может происходить непосредственное соединение первого передающего устройства 102 блока 100 связи с вторым передающим средством стерильного блока 400.
Стерильный шлюз 200 имеет, далее, две боковые стенки 218, 220, одну переднюю торцевую стенку 222 и одну заднюю торцевую стенку 224. На внешних сторонах боковых стенок 218, 220 и торцевых стенок 222, 224 образован окружной край 202, с которым, как уже было описано в связи с Фиг. 5, стерильная пленка стерильного чехла 38 соединяется подходящим для этого образом.
На внутренней стороне передней торцевой стенки 222 жестко зафиксированы находящиеся с боков возле V-образной выемки 226 этой торцевой стенки 222 два направляющих и деблокирующих ребра 228, 230, которые при соединении стерильного шлюза 200 со стерильным блоком 400 служат деблокирующими элементами для разблокировки стерильных клапанов стерильного блока 400, что будет описано ниже более подробно.
В дне 212 стерильного шлюза 200 имеются первое индикационное окно 232 и второе индикационное окно 234, каждое в форме сквозного отверстия, через которые проводятся уже упоминавшиеся детектирующие элементы 426, 428 стерильного блока 400, так что оно могут быть детектированы первым датчиком 118 связи и вторым датчиком 120 связи блока 100 связи.
На переднем и заднем концах клапанов 208, 210 шлюза предусмотрено по одному направляющему желобку 236-242. Передние направляющие желобки 236, 238 не несут никаких функций. В задние направляющие желобки 240, 242 в закрытом состоянии клапанов 208, 210 шлюза входят зубцы 246, 248 направляющей вилки 244. Направляющая вилка 244 с помощью пружины в своем верхнем на Фиг. 8 положении за счет входа ее зубцов 246, 248 с зацеплением в направляющие желобки 240, 242 прижимает и закрывает клапаны 208, 210 шлюза и удерживает их в их закрытом положении. Клапаны 208, 210 шлюза из-за вхождения зубцов 246, 248 вилки не могут быть отжаты друг от друга, так что нестерильное передающее средство 102 блока 100 связи при закрытых клапанах 208, 210 шлюза надежно отгорожено, и нестерильные элементы блока 100 связи надежно отгорожены от стерильной зоны 39.
Клапаны 208, 210 шлюза конструктивно одинаковы, так что для применения с обеих сторон на торцевых сторонах клапанов 208, 210 шлюза имеется по одному направляющему желобку 236-242. В других вариантах выполнения клапаны 208, 210 шлюза могут быть выполнены различным образом и только на одной стороне иметь направляющий желобок 240, 242, в который с зацеплением входят зубцы 246, 248 направляющей вилки 244.
В боковых стенках 218, 220 предусмотрено по одному фиксирующему желобку 250, 252, в которые с зацеплением входит фиксирующий элемент стерильного блока 400 при соединении стерильного шлюза 200 со стерильным блоком 400. На задней торцевой стенке 224 стерильного шлюза 200 предусмотрено направляющее ребро 254, которое при соединении стерильного шлюза 200 со стерильным блоком 400 с зацеплением входит в направляющий паз 452 стерильного блока 400, как это показано на Фиг. 16.
На Фиг. 10 показан с частичным вырезом вид сбоку стерильного шлюза 200. На внешней стороне задней торцевой стенки 224 стерильного шлюза 200 выполнен фиксирующий носик 255, в который входит фиксирующий носик 126 фиксирующего элемента 128 блока 100 связи, когда блок 100 связи соединен со стерильным шлюзом 200.
Для корректного позиционирования стерильного шлюза 200 в приемной области блока 100 связи предусмотрены два выступающих снизу из дна позиционирующих элемента 256, 257, которые входят с зацеплением в соответствующие отверстия 136, 138 в дне приемной области блока 100 связи. Позиционирующие элементы 256, 257 снабжены фаской или - альтернативно - имеют коническую форму, чтобы их можно было просто вводить в показанные на Фиг. 7 отверстия 136, 138 блока 100 связи.
Каждое из индикационных окон 232 и 234 закрыто пленкой 262, 264, которая стерильно отгораживает детектирующие элементы 426, 428 стерильного блока 400 также и в том случае, когда они выступают через эти индикационные окна 232, 234 и входят в углубления датчиков 118, 120 блока 100 связи. При этом пленка 262, 264 упруго и/или пластично деформируется и не рвется.
На Фиг. 11 показан вид в разрезе стерильного шлюза 200 по Фиг. 10, сечение по A-A. На этой фигуре ось вращения, вокруг которой клапан 110 шлюза поворачивается из закрытого состояние в открытое состояние и обратно, обозначена как D1, а ось вращения, вокруг которой поворачивается клапан 208 шлюза, обозначена как D2.
На Фиг. 12 показан вид в разрезе стерильного шлюза 200 по Фиг. 10, сечение по B-B, а на Фиг. 13 показан вид в разрезе стерильного шлюза 200 по Фиг. 10, сечение по C-C. Как видно на Фиг. 8-13, боковые стенки 218, 220, торцевые стенки 222, 224 и дно 218 образуют «корыто» корпуса, в которое по меньшей мере частично может быть вставлен стерильный блок 400 для соединения этого стерильного блока 400 с блоком 100 связи. Это «корыто» корпуса служит, таким образом, в целом как первая соединительная область 266 стерильного шлюза 200. Внешняя сторона стерильного шлюза 200 служит как вторая соединительная область 268, которой стерильный шлюз 200 может соединяться с блоком 100 связи.
Как видно на Фиг. 13, передние концы зубцов 246, 248 направляющей вилки 244 входят в направляющие желобки 240, 242. Обращенные друг к другу боковые стенки направляющих желобков 240, 242 вместе с этими передними концами зубцов 246, 248 направляющей вилки 244 образуют кулисную направляющую, посредством которой клапаны 208, 210 шлюза закрываются, когда указанные передние концы зубцов 246, 248 вилки 244 поворачиваются вверх.
На Фиг. 14 показан укрупненный вид с частично открытыми клапанами 208, 210 шлюза и с находящимися в зацеплении с направляющими желобками 240, 242 зубцами 246, 248 направляющей вилки 244. Направляющая вилка 244 с помощью пружины 258 направляющей вилки поворачивается вверх вокруг оси вращения D3, образованной направляющим штифтом 260, установленным в задней торцевой стенке 224 (в показанном на Фиг. 8-14 лежачем положении стерильного шлюза 200), таким образом, что клапаны 208, 210 шлюза с помощью упругой силы этой пружины 258 направляющей вилки закрываются и удерживаются в закрытом положении. Направляющий штифт 260 служит для направления и обеспечения опоры для пружины 258, а также обеспечения опоры для направляющей вилки 244. При использовании стерильного блока 400 направляющая вилка 244 против упругой силы пружины 258 направляющей вилки поворачивается вниз в стерильный шлюз 200, так что стерильные клапаны 208, 210 посредством предусмотренных на стерильном блоке 400 блокирующих элементов поворачиваются из закрытого состояния в открытое состояние.
На Фиг. 15 показан вид в изометрии инструментального блока 300 со стерильным блоком 400 и хирургическим инструментом 500. На проксимальном конце установленного с возможностью вращения наружного хвостовика 512 инструмента установлен с возможностью сгибания и вращения рабочий орган 514 с управляемыми захватными элементами 516, 518. Движения рабочего органа 514 могут осуществляться с помощью приводных элементов 110-116 блока 100 связи и приводимых элементов 408-414 стерильного блока 400, когда стерильный блок 400 через стерильный шлюз 200 соединен с блоком 100 связи. Стерильный блок 400 содержит стерильные клапаны 402, 404, которые на Фиг. 15 показаны в открытом состоянии, а на Фиг. 16-в закрытом состоянии. Внутри стерильного блока 400 размещено второе передающее средство, которое видно при открытых стерильных клапанах 402, 404 и которое обозначено ссылочной позицией 406. Второе передающее средство 406 содержит первый приводимый элемент 408 поступательного движения, который при соединении с блоком связи находится в зацеплении с первым приводным элементом 110 поступательного движения, и второй приводимый элемент 410 поступательного движения, который находится в зацеплении с вторым приводным элементом 112 поступательного движения блока 100 связи, каждый из которых предназначен для передачи возвратно-поступательного движения. Далее, предусмотрены соединяемый с первым вращательным приводным элементом 114 блока 100 связи первый вращательный приводимый элемент 412, а также находящийся в зацеплении со вторым вращательным приводным элементом 116 блока 100 связи второй вращательный приводимый элемент 414, каждый из которых предназначен для передачи вращательного движения. У соединенного с блоком связи 400 хирургического инструмента 500 рабочий орган 514 поворачивается относительно горизонтальной оси вращения D4 в направлении стрелки P1 на угол до 90°, когда второй приводимый элемент 410 поступательного движения стерильного блока 400 перемещается вторым приводным элементом 112 поступательного движения блока 100 связи в направлении стрелки P2. При движении первого приводимого элемента 408 поступательного движения в направлении стрелки P3 захватные элементы 516, 518 рабочего органа 514 раздвигаются и перемещаются в противоположных направлениях друг от друга. При приведении в действие первого вращательного приводимого элемента 412 стерильного блока 400 с помощью первого вращательного приводного элемента 114 блока 100 связи указанный рабочий орган 514 может вращаться независимо от хвостовика 512 инструмента. С помощью второго вращательного приводимого элемента 414 при соединении и приводе от второго вращательного приводного элемента 116 блока 100 связи может происходить вращение хвостовика 512 инструмента вокруг его продольной оси 510, чтобы повернуть положение горизонтальной оси вращения D4 рабочего органа 514 вокруг оси вращения 510 наружного хвостовика 512 инструмента, не вовлекая при этом во вращение сам рабочий орган 514.
Далее, предусмотрена первая пружина 416, которая прижимает первый приводимый элемент 408 поступательного движения стерильного блока 400 противоположно направлению стрелки P3 в его конечное положение. Далее, предусмотрена вторая пружина 418, которая прижимает второй приводимый элемент 410 поступательного движения стерильного блока 400 противоположно направлению стрелки P2 в его конечное положение. Далее, стерильный блок 400 имеет подшипник 420 для опирания с возможностью вращения наружного хвостовика 512 инструмента в стерильном блоке 400. В порядке альтернативы хирургическому инструменту 500 со стерильным блоком 400 могут быть соединены и другие инструменты, например, ножницы, иглодержатель, оптические инструменты, промывочные узлы, отсасывающие узлы, инструменты для высокочастотной хирургии и другие инструменты, используемые при операциях, в частности, при лапароскопических операциях, причем вторые передающие средство 406 рассчитаны с возможностью реализации соответствующих функций.
Второе передающее средство 406 согласно этому примеру осуществления содержит также электрический передающий элемент с первым электрическим контактом 422, выполненным в виде контактного кольца, и второй выполненный в виде контактного кольца электрический контакт 423, которые при соединении стерильного блока 400 с блоком 100 связи через стерильный шлюз 200 создают с электрическими контактами 106, 108 блока 100 связи электрическое соединение для передачи высокочастотной электрической энергии, используемой при высокочастотной хирургии. В других примерах осуществления электрические передающие средства могут быть вообще не предусмотрены.
Стерильный блок 400 имеет два выступающих кулачка 415, 417, которые при вставлении стерильного блока 400 в стерильный шлюз 200 могут давить в разблокированные стерильные клапаны 208, 210, отжимая их друг от друга по меньшей мере до тех пор, пока эти кулачки 415, 417 не окажутся расположенными между этими стерильными клапанами 208, 210. При дальнейшем вдвигании стерильного блока 400 в стерильный шлюз 200 клиновидные блокирующие элементы 456-462 стерильного блока 400 раздвигают стерильные клапаны 208, 210 еще дальше, пока последние не окажутся в их показанном на Фиг. 9 открытом положении.
Донная пластина 401 стерильного блока 400, обращенная вверх на Фиг. 15 и 16, содержит, как уже упоминалось, два детектирующих элемента 426, 428, выполненных в виде выступающих индикационных штифтов. При соединении стерильного блока 400 с блоком 100 связи с помощью стерильного шлюза 200, расположенного между стерильным блоком 400 и блоком 100 связи, детектирующий элемент 426 выступает через первое индикационное окно 232 стерильного шлюза 200 в углубление первого датчика 118 связи блока 100 связи, а второй детектирующий элемент 428 выступает через второе индикационное окно 234 в углубление второго датчика 120 связи блока 100 связи. При детектировании детектирующих элементов 426, 428 с помощью датчиков 118, 120 связи может детектироваться корректное соединение стерильного шлюза 200 с блоком 100 связи и стерильного блока 400 со стерильным шлюзом 200, так что только после детектирования детектирующих элементов 426, 428 с помощью датчиков 118, 120 связи блоком управления может быть разрешен привод передающих элементов 110-116. Далее, передача высокочастотной энергии допускается только после корректного детектирования детектирующих элементов 426, 428 с помощью датчиков 118, 120 связи через передающие элементы 106, 108.
Стерильный блок 400 имеет, далее, два расположенных на противоположных боковых стенках 430, 432 фиксирующих элемента 434, 436, которые могут управляться с помощью выступающего из боковой стенки 430, 432 исполнительного элемента 438, 440. Фиксирующие элементы 434, 436 входят в предусмотренные в боковых стенках 218, 220 стерильного шлюза 200 фиксирующие желобки 250, 252, если стерильный блок 400 соединен со стерильным шлюзом 200 корректно.
Передняя торцевая стенка 442 стерильного блока 400 снабжена двумя пазами 444, 446, в которые вводятся направляющие и деблокирующие ребра 228, 230 стерильного шлюза 200 при соединении стерильного блока 400 со стерильным шлюзом 200, и при этом, как это будет дополнительно пояснено ниже, стерильные клапаны 402, 404 разблокируются.
Далее, направляющее ребро 254 стерильного шлюза 200 входит в имеющийся на задней торцевой стороне 450 стерильного блока 400 направляющий паз 452. На нижнем конце этого направляющего паза 452 из донной пластины 401 выступает наружу управляющее ребро 454, которое при вставлении стерильного блока 400 в стерильный шлюз 200 отжимает направляющую вилку 244 вниз, и за счет этого блокировка клапанов 208, 210 шлюза снимается посредством направляющей вилки 244.
На Фиг. 17 показан вид сбоку стерильного блока 400 с частью хвостовика 512 инструмента хирургического инструмента 500. На Фиг. 18 показан в разрезе стерильный блок по Фиг. 17, сечение по E-E. Как можно понять из этого вида в разрезе, стерильный клапан 402 находится в зацеплении с имеющейся в стерильном блоке 400 направляющей заслонкой 464. Стерильный клапан 404 находится в зацеплении с расположенной внутри стерильного блока 400 направляющей заслонкой 466. Для открытия стерильного клапана 402 он установлен поворотно относительно оси вращения D5, а направляющая заслонка 464 установлена поворотно относительно оси вращения D6. Для открытия стерильного клапана 404 он установлен поворотно относительно оси вращения D7, а направляющая заслонка 466 установлена поворотно относительно оси вращения D8. В закрытом состоянии эти стерильные клапаны 402, 404 блокируются с помощью направляющих заслонок 464, 466, а для открытия стерильных клапанов 402, 404 они деблокируются, как это будет подробнее пояснено ниже в связи с Фиг. 22-28.
На Фиг. 19 показан в разрезе стерильный блок 400 по Фиг. 17, сечение по F-F. На Фиг. 19 видна пружина 468, с помощью которой исполнительные элементы 438, 440, а с ними и фиксирующие носики 434, 436 отжимаются наружу, так что эти фиксирующие носики 434, 436 вдавливаются в фиксирующие желобки 250, 252 стерильного шлюза 200, если стерильный блок 400 был корректно вставлен в стерильный шлюз 200.
На Фиг. 20 показан фрагмент вида снизу инструментального блока 300 с закрытыми стерильными клапанами 402, 404 стерильного блока 400. На этом изображении видны деблокирующий штифт 470 направляющей заслонки 464 и деблокирующий штифт 472 направляющей заслонки 466. Деблокирующий штифт 470 входит в направляющий и деблокирующий паз 444, а деблокирующий штифт 472 входит в деблокирующий и направляющий паз 446. При соединении стерильного блока 400 со стерильным шлюзом 200 направляющие и деблокирующие ребра 228, 230 стерильного шлюза 200 вводятся в направляющие пазы 444, 446 и отжимают деблокирующие штифты 470, 472 из показанного на Фиг. 20 заблокированного положения в показанное на Фиг. 21 разблокированное положение. На Фиг. 21 стерильные клапаны 202, 204 и направляющие заслонки 464, 466 представлены разблокированными и открытыми.
На Фиг. 22 показан вид сверху стерильной клапанной системы стерильного блока 400 с закрытыми стерильными клапанами 402, 404 и закрытыми и заблокированными направляющими заслонками 464, 466. Эта стерильная клапанная система помимо стерильных клапанов 402, 404 и направляющих заслонок 464, 466 имеет пружину 474, которая предварительно напряжена и удерживает указанную направляющую заслонку 466 и находящийся в зацеплении с этой направляющей заслонкой 466 стерильный клапан 404 в показанном на Фиг. 22 закрытом состоянии. После разблокирования направляющей заслонки 466 эта направляющая заслонка 466 и стерильный клапан 404 могут открываться против упругой силы пружины 474. Стерильная клапанная система имеет, далее, пружину 476, которая предварительно напряжена и удерживает в закрытом состоянии направляющую заслонку 464 и стерильный клапан 402. Направляющая заслонка 464 и стерильный клапан 402 могут открываться против упругой силы пружины 476, если направляющая заслонка 464 была деблокирована. Для разблокирования направляющих заслонок 464, 466 деблокирующие штифты 470, 472 посредством направляющих и деблокирующих ребер 228, 230 перемещаются в направлении стрелок P4, P5 внутри своего небольшого зазора в показанное на Фиг. 24 положение. При этом стерильные клапаны 402, 404 не сдвигаются или лишь незначительно сдвигаются в направлении стрелок P4, P5, так что для разблокирования осуществляется относительное движение направляющих заслонок 464, 466 относительно стерильных клапанов 402, 404 в направлении стрелок P4, P5. На Фиг. 23 представлен вид в разрезе стерильной клапанной системы по Фиг. 22, сечение по G-G, с закрытыми направляющими заслонками 464, 466 и закрытыми стерильными клапанами 402, 404.
На Фиг. 24 показаны направляющие заслонки 464, 466 и стерильные клапаны 402, 404 в их открытых положениях. На Фиг. 25 показан вид в разрезе стерильной клапанной системы по Фиг. 24, сечение по H-H, с открытыми направляющими заслонками 464, 466 и открытыми стерильными клапанами 402, 404.
На Фиг. 26 показан в аксонометрии укрупненный вид стерильного клапана 404 и находящейся в зацеплении с ним направляющей заслонки 466 в закрытом заблокированном положении. Дополнительно не показанная на Фиг. 26 пружина 474 прижимает направляющую заслонку 466 противоположно направлению стрелки P5 в ее заблокированное положение, и эта пружина 474 дополнительно прижимает указанную направляющую заслонку 466 противоположно направлению стрелки P4 в ее заблокированное положение, так что для разблокирования направляющих заслонок 464, 466 деблокирующие штифты 470, 472 перемещаются под действием упругой силы пружин 474, 476 в направлении стрелок P4, P5.
Стерильный клапан 404 на обращенной к направляющей заслонке 466 стороне имеет семь направляющих и блокировочных пазов 478-488, в каждый из которых входит направляющее и блокировочное ребро 479-489 направляющей заслонки 466. Направляющие и блокировочные ребра 479-489 расположены на обращенной к стерильному клапану 404 стороне направляющей заслонки 466. Стерильный клапан 404 и направляющая заслонка 466 показаны на Фиг. 26 в своем заблокированном положении. В этом заблокированном состоянии направляющие и блокировочные ребра 479-489 находятся позади соответствующих выступов направляющих и блокировочных пазов 478-488, так что за счет этого предотвращается поворот стерильного клапана 404 и направляющей заслонки 466 вокруг осей вращения D5, D6 в направлении стрелок P6 и P7. Для разблокирования направляющей заслонки 466 ее перемещают с помощью деблокирующего штифта 472 в направлении стрелки P5, так что направляющие и блокировочные ребра 479-489 выдвигаются из выступов направляющих и блокировочных пазов 478-488, и направляющая заслонка 466 и стерильный клапан 404 могут двигаться вокруг осей вращения D7, D8 в направлении стрелок P6 и P7.
Конструкция из стерильного клапана 402 и направляющей заслонки 464 зеркально-симметрична показанной на Фиг. 26 конструкции из стерильного клапана 404 и направляющей заслонки 466, так что их блокировка и разблокировка происходит таким же образом, что и описанные выше процессы для стерильного клапана 404 и направляющей заслонки 466.
На Фиг. 27 показан вид сверху с частичным вырезом направляющей заслонки 466 и клапана 404 шлюза в закрытом и заблокированном состоянии. В вырезанной области виден направляющий и блокировочный паз 480 направляющей заслонки 466. Этот направляющий и блокировочный паз 480 располагается при этом за служащим в качестве блокирующего носика выступом 490 указанного направляющего и блокировочного паза 480, так что под воздействием на направляющую заслонку 466 и/или на стерильный клапан 404 момента для совершения вращательного движения направляющей заслонки 466 в направлении стрелки P7 или стерильного клапана 404 в направлении стрелки P6 указанный направляющий и блокировочный элемент 480 поджимался бы к блокирующему носику 490. Вследствие этого не были бы возможны ни поворот направляющей заслонки 466 вокруг оси вращения D8 в направлении стрелки P7, ни поворот стерильного клапана 404 вокруг оси вращения D7 в направлении стрелки P6. Лишь после того, как направляющая заслонка 466 будет сдвинута в направлении стрелки P5, как это показано на Фиг. 28, направляющая заслонка 466 может поворачиваться вокруг оси вращения D8 в направлении стрелки P7, а стерильный клапан 404 может поворачиваться вокруг оси вращения D7 в направлении стрелки P6. Далее, направляющая заслонка 466 движется при этом в направлении стрелки P8 относительно стерильного клапана 404. За счет смещения направляющей заслонки 466 в направлении стрелки P5 эта направляющая заслонка 466 оказывается сдвинутой по отношению к стерильному клапану 404, так что направляющее и блокировочное ребро 481 больше не будет находиться позади выступа 490, а расположится в области открытого снаружи направляющего паза 480. Благодаря этому стерильный клапан 404 может повернуться в направлении стрелки P6, а направляющая заслонка 466 в может повернуться направлении стрелки P7, так что стерильный клапан 404 и направляющая заслонка 466 могут быть перемещены в свои открытые положения. Другие направляющие и блокировочные ребра 479-489 вместе с направляющим и блокировочным ребром 481 перемещаются из образованной указанным выступом области блокировки соответствующего направляющего и блокировочного паза 478-488, как это уже описано выше для направляющего и блокировочного ребра 481 и направляющего и блокировочного паза 480.
На Фиг. 29 направляющая заслонка 466 и стерильный клапан 404 показаны в их открытом положении, в котором направляющие и блокировочные ребра 479-489 за счет относительного движения в направлении стрелки P8 частично выступают из направляющих и блокировочных пазов 478-488.
На Фиг. 30 показана с частичным вырезом система со стерильным шлюзом 200 и стерильным блоком 400, соединенным с этим стерильным шлюзом 200. На Фиг. 31 представлен вид в разрезе системы по Фиг. 30, сечение по I-I. На Фиг. 32 показан вид в разрезе системы по Фиг. 30, сечение по J-J. На Фиг. 33 представлен вид в разрезе системы по Фиг. 30, сечение по K-K, а на Фиг. 34 показан вид в разрезе системы по Фиг. 30, сечение по L-L. Как можно видеть на Фиг. 31, указанный стерильный блок 400 содержит RFID-транспондер 494, в котором предпочтительно записаны по меньшей мере один однозначный код опознавания стерильного блока 400 и предпочтительно данные о связанном со стерильным блоком 400 хирургическом инструменте 500. Далее, в нем могут быть записаны другие сведения, например, сведения о производителе стерильного блока 400, пакеты данных, информация о сроке годности, предпочтительно в не перезаписываемой области этого RFID-транспондера 494. Предпочтительно в лишь однажды записываемой области памяти RFID-транспондера 494 могут быть сохранены сведения о первом использовании стерильного блока 400, в частности, момент времени этого первого использования и/или однозначный идентификационный код операции, при которой имело место первое использование стерильного блока 400, так что благодаря этой информации может быть исключено использование этого стерильного блока 400 при еще одной операции, в частности, с другим пациентом. Код опознавания RFID-транспондера 494 и/или сохраненные в RFID-транспондере 494 сведения могут быть считаны с помощью RFID-считывающего и записывающего устройства 121 блока 100 связи, и в случае необходимости эти сведения могут быть сохранены в форме данных в RFID-транспондере 494.
На Фиг. 32 показано, что при соединении стерильного блока 400 со стерильным шлюзом 200 как клапаны 208, 210 шлюза, так и направляющие заслонки 464, 466, и стерильные клапаны 402, 404 открыты, так что второе передающее средство 406 стерильного блока 400 может быть через клапаны 208, 210, 402, 404, 464, 466 приведено в непосредственный контакт с первым передающим средством 102. В частности, может быть создано непосредственное электрическое соединение между электрическими контактными элементами 106, 108 блока 100 связи и электрическими контактными элементами 422, 423 стерильного блока 400, а также обеспечено непосредственное зацепление механических передающих элементов 110-116 блока 100 связи с передающими элементами 408-414 стерильного блока 400. Таким образом, не нужны никакие дополнительные электрические и/или механические передающие элементы между блоком 100 связи и стерильным блоком 400. Такое выполнение является более экономичным, а также обеспечивает большую устойчивость к сбоям в работе, чем при наличии дополнительных передающих элементов, в частности, механических передающих элементов между блоком 100 связи и стерильным блоком 400, как это имеет место, например, в уровне техники.
На Фиг. 32 хорошо видно, что стерильные клапаны 208, 210 с помощью V-образных элементов 456-462 были отжаты друг от друга до их показанного на Фиг. 32 положения после того, как они с помощью кулачков 415, 417 уже были отжаты друг от друга настолько, что указанные V-образные элементы 456-462 вошли в образовавшийся за счет этого проем и отжали клапаны 208, 210 шлюза, а также стерильные клапаны 402, 404 вместе с направляющими заслонками 464, 466 в их открытые положения.
В открытом состоянии стерильная внешняя сторона стерильного клапана 402 и стерильная внешняя сторона клапана 208 шлюза расположены противоположно друг другу. Таким же образом стерильная внешняя сторона стерильного клапана 404 стерильной и внешняя сторона клапана 210 шлюза расположены противоположно друг другу, так что даже при непосредственном контакте стерильного клапана 402 с клапаном 208 шлюза или, соответственно, при непосредственном контакте стерильного клапана 404 с клапаном 210 шлюза не происходит ни бактериальное загрязнение клапанов 208, 210 шлюза, ни бактериальное загрязнение стерильных клапанов 402, 404.
Таким образом, только стерильные, бактериально не загрязненные области стерильного шлюза 200 контактируют со стерильными, бактериально не загрязненными областями стерильного блока 400, так что после отделения стерильного блока 400 от стерильного шлюза 200 не возникает никакой опасности бактериального загрязнения стерильной зоны 39.
На Фиг. 34 показано, как фиксирующие элементы 434, 436 стерильного блока 400 входят в фиксирующие желобки 250, 252 стерильного шлюза 200, если стерильный блок 400 корректно соединен со стерильным шлюзом 200. Далее, на Фиг. 34 можно увидеть, как детектирующий элемент 426 выступает через первое индикационное окно 232, причем этот детектирующий элемент 426 при соединении стерильного шлюза 200 с блоком 100 связи входит в углубление первого датчика 118 блока 100 связи, так что он детектирует указанный детектирующий элемент 426. Далее, на Фиг. 34 показана пленка 162, которая упруго и/или пластично деформируется детектирующим элементом 426, и этот детектирующий элемент 426 за счет этого стерильно отгорожен.
На Фиг. 35 показаны элементы стерильной клапанной системы со стерильными клапанами 402, 404 и направляющими заслонками 464, 466, а также элементы клапанной системы стерильного шлюза 200 с клапанами 208, 210 шлюза. Как уже пояснялось выше, зубцы 246, 248 направляющей вилки 244 входят в направляющие желобки 240, 242 в закрытом состоянии клапанов 208, 210 шлюза, так что за счет такого захвата возникает соединение с геометрическим замыканием, которое препятствует открытию клапанов 208, 210 шлюза при надавливании. В показанном на Фиг. 35 положении направляющей вилки 244 ее зубцы 246, 248 больше не находятся в зацеплении с направляющими желобками 240, 242 клапанов 208, 210 шлюза, так что последние могут открываться дальше посредством V-образных блокирующих элементов 456-462 стерильного блока 400. На Фиг. 35 клапаны 208, 210 шлюза и направляющие заслонки 464, 466, а также стерильные клапаны 202, 204 показаны в положении перед тем, как клапаны 208, 210 шлюза с помощью V-образных блокирующих элементов 456-462 будут открыты дальше. При этом как клапаны 208, 210 шлюза, так и направляющие заслонки 464, 466 и стерильные клапаны 402, 404 открываются дальше до показанного на Фиг. 33, 34 положения. Для разъяснения различия между заблокированным положением и разблокированным положением деблокирующих штифтов 470, 472 блокирующий штифт 470 на Фиг. 35 показан в своем заблокированном положении, а деблокирующий штифт 472 показан в своем разблокированном положении. При этом следует обратить внимание на то, что направляющая заслонка 464 и стерильный клапан 402 несмотря на нахождение деблокирующего штифта 470 в заблокированном положении были повернуты вокруг их осей вращения D5, D6 до показанного на Фиг. 35 частично открытого положения, хотя при фактической блокировке это было бы невозможно.
На Фиг. 36 показан вид сбоку системы по Фиг. 30-35, а на Фиг. 37 показан вид в разрезе участка системы по Фиг. 36, сечение по M-M. На Фиг. 38 показан вид в разрезе системы по Фиг. 36, сечение по N-N.
На Фиг. 39 показан вид сверху системы с блоком 100 связи, стерильным шлюзом 200 и инструментальным блоком 300, которая содержит стерильный блок 400 и стерильный хирургический инструмент 500. На Фиг. 40 показан вид в разрезе системы по Фиг. 39, сечение по O-O, в первом положении непосредственно перед соединением стерильного блока 400 инструментального блока 300 со стерильным шлюзом 200, уже соединенным с блоком 100 связи. На Фиг. 41 показан вид в разрезе системы по Фиг. 39, сечение по O-O, во втором положении при соединении стерильного блока 400 инструментального блока 300 со стерильным шлюзом 200, уже соединенным с блоком 100 связи. На Фиг. 42 показан вид в разрезе системы по Фиг. 39, сечение по O-O, в третьем положении, в котором стерильный блок 400 инструментального блока 300 соединен со стерильным шлюзом 200, уже соединенным с блоком 100 связи, так что первые передающие средства 102 блока 100 связи для непосредственного соединения находятся в зацеплении с передающими элементами вторых передающих средств 406.
При показанном на Фиг. 40 положении направляющие заслонки 464, 466 движутся за счет введения направляющих и деблокирующих ребер 228, 230 в пазы 444, 446 и благодаря этому уже были вдоль своих осей вращения D6, D8 в направлении стрелок P4, P5 перемещены из их заблокированного положения в их разблокированное положение, так что стерильные клапаны 402, 404 вместе с направляющими заслонками 464, 466 открыты надавливанием за счет движения стерильного блока 400 в направлении стрелки P10 и вызванного этим контактирования стерильных клапанов 402, 404 с клапанами 208, 210 шлюза. Благодаря этому стерильный блок 400 попадает глубже в предусмотренную для размещения стерильного блока 400 приемную область стерильного шлюза 200, так что управляющее ребро 454 попадает в зацепление с направляющей вилкой 244 и поворачивает ее против упругой силы пружины 258 этой направляющей вилки. За счет этого зубцы 246, 248 направляющей вилки 244 находятся в зацеплении с направляющими желобками 240, 242 таким образом, что клапаны 208, 210 шлюза могут отжиматься друг от друга кулачками 415, 417 и тем самым открываться. При дальнейшем движении стерильного блока 400 в направлении стрелки P10 V-образные блокирующие элементы 458-462 входят в зацепление с клапанами 208, 210 шлюза и отжимают их и стерильные клапаны 402, 404 вместе с направляющими заслонками 464, 466 дальше наружу в их полностью открытое положение, показанное на Фиг. 42. За счет контакта клапанов 208, 210 шлюза со стерильными клапанами 402, 404 они вместе с направляющими заслонками 464, 466 открываются дальше до тех пор, пока все клапаны 208, 210, 402, 404, 464, 466 не окажутся в показанном на Фиг. 42 открытом положении.
При обратном движении стерильного блока 400 при извлечении стерильного блока 400 из стерильного шлюза 200, т.е. из показанного на Фиг. 42 положения в показанное на Фиг. 40 положение против направления стрелки P10, происходит движение в обратном порядке стерильных клапанов, направляющих заслонок и клапанов шлюза, так что эти клапаны, в частности, закрываются под действием упругой силы пружин 474, 476, зубцы 246, 248 направляющей вилки 244 снова приводятся в зацепление с направляющими желобками 240, 242, и клапаны 208 шлюза, 210 полностью закрываются. Благодаря созданному геометрическому замыканию зубцов 246, 248 вилки с направляющими желобками 240, 244 клапаны 208, 210 шлюза надежно удерживаются в их закрытом положении, так что клапаны 208, 210 шлюза не могут быть открыты снаружи. Направляющие заслонки 464, 466 при удалении стерильного блока 400 из стерильного шлюза 200 с помощью пружин 474, 476 тоже полностью закрываются и перемещаются в свое заблокированное положение, так что после этого стерильные клапаны 402, 404 не могут быть открыты даже при внешнем силовом воздействии на них.
На Фиг. 43 показан фрагмент инструментального блока 1300 со стерильным блоком 1400 и хирургическим инструментом 1500 согласно второму варианту выполнения. В отличие от инструментального блока 300 стерильный блок 1400 инструментального блока 1300 не имеет стерильных клапанов, а снабжен жалюзи 1410 для стерильного отгораживания приводимых элементов. Другая конструкция и функционирование инструментального блока 1300 согласуется с конструкцией и функционированием инструментального блока 300 согласно Фиг. 1-42.
На Фиг. 44 показан фрагмент стерильного чехла 1038 со стерильным шлюзом 1200, который в отличие от стерильного шлюза 200 не имеет стерильных клапанов, но имеет жалюзи 1210 для стерильного отгораживания приводных элементов блока 100 связи. Жалюзи 1410 блока связи 1400, как и жалюзи 1210 стерильного шлюза 1200 открываются подходящим способом путем механического захвата при соединении стерильного блока 1400 со стерильным шлюзом 1200 или, соответственно, стерильного блока 1400 со стерильным шлюзом 200, или, соответственно, стерильного блока 400 со стерильным шлюзом 1200. В порядке альтернативы могут быть предусмотрены активные приводные элементы, как например, электродвигатель для открытия или закрытия соответствующих жалюзи 1410, 1210.
На Фиг. 45 показан фрагмент инструментального блока 2300 со стерильным блоком 2400 согласно третьему варианту выполнения. Стерильный блок 2400 не содержит элементов для стерильного отгораживания приводимых элементов, так что этот инструментальный блок 2400 после отделения от стерильного шлюза 200, 1200 или после отделения от еще одного показанного на Фиг. 46 стерильного шлюза 2200 немедленно удаляется из стерильной зоны 39.
Показанный на Фиг. 46 стерильный чехол 2038 содержит стерильный шлюз 2200, который таким же образом, что и стерильный блок 200 может быть соединен с блоком 100 связи. В отличие от стерильного шлюза 200 стерильный шлюз 2200 не имеет клапанов шлюза, но содержит снабженную показанными пунктиром заданными местами разрыва пленку, которая при соединении стерильного блока 400, 1400, 2400 со стерильным шлюзом 2200 разрывается в заданных местах разрыва, так что непосредственное соединение приводных элементов 110-116 блока 100 связи с приводимыми элементами 408-414 осуществляется простым образом. Предпочтительно при использовании стерильного шлюза 2200 стерильный блок 400, 1400, 2400 во время операции не отделяется, а отделяется только после того, как операция будет закончена.
Перечень ссылочных обозначений
10 система
12 манипулятор
14 штатив
16, 16a-16d роботизированная рука
20 головка штатива
22, 26 приводной блок
24 ножка штатива
28, 30 плечи штатива
32 стойка операционного стола
34 операционный стол
36 блок управления
37 блок ввода и вывода
38 стерильная оболочка
39 стерильная зона операции
40a-58a, 40b-58b,
40c-58c, 40d-58d сегменты
57, 61, 67 оси вращения
59 соединительный механизм
60 сегмент
62, 64, 66 участки телескопического устройства
68 приводной блок
69 точка качания
100 блок связи
102 первое передающее средство
104 электрический передающий элемент
106, 108 электрический контакт
109 оптический передающий элемент
110 первый приводной элемент поступательного движения
112 второй приводной элемент поступательного движения
114 первый вращательный приводной элемент
116 второй вращательный приводной элемент
118, 120 датчик связи
121 RFID- считывающее и записывающее устройство
122, 124 направляющий паз
123, 125 передний конец направляющего паза
126 фиксирующий носик
128 фиксирующий элемент
130 ось вращения
132 пружина
134 кнопка разблокировки
136, 138 отверстие
200 стерильный шлюз
202 присоединительный край
204, 206 направляющий штифт
208, 210 клапан шлюза
212 дно
214, 216 отверстие
218, 220 боковая стенка
222 передняя торцевая стенка
224 задняя торцевая стенка
226 V-образная выемка
228, 230 направляющее и деблокирующее ребро
232, 234 индикационное окно
236-242 направляющий желобок
244 направляющая вилка
246, 248 зубцы
250, 252 фиксирующий желобок
254 направляющее ребро
255 фиксирующий носик
256, 257 позиционирующий элемент
258 пружина направляющей вилки
260 направляющий штифт
262, 264 пленка
266 первая соединительная область
268 вторая соединительная область
300, 300a-300d инструментальный блок
400 стерильный блок
401 донная пластина
402, 404 стерильный клапан
406 второе передающее средство
408 первый приводимый элемент поступательного движения
410 второй приводимый элемент поступательного движения
412 первый вращательный приводимый элемент
414 второй вращательный приводимый элемент
415, 417 кулачки
416, 418 пружина
420 хвостовик инструмента
421 оптический интерфейс
422, 423 электрический контакт
424 передняя торцевая стенка
426, 428 детектирующий элемент
430, 432 боковая стенка
434, 436 фиксирующий элемент
438, 440 исполнительный элемент
442 передняя боковая стенка
444, 446 паз
450 задняя торцевая сторона
452 направляющий паз
454 управляющее ребро
456-462 V-образный блокирующий элемент
464, 466 направляющая заслонка
468 пружина
470, 472 деблокирующий штифт
474, 476 пружина
478-488 направляющий и блокировочный паз
479-489 направляющее и блокировочное ребро
490 выступ
494 RFID-транспондер
500 инструмент
510 продольная ось
512 хвостовик инструмента
514 рабочий орган
516, 518 захватный элемент
D1, D2, D3, D4,
D5, D6, D7, D8 ось вращения
P1-P10 стрелки направления.
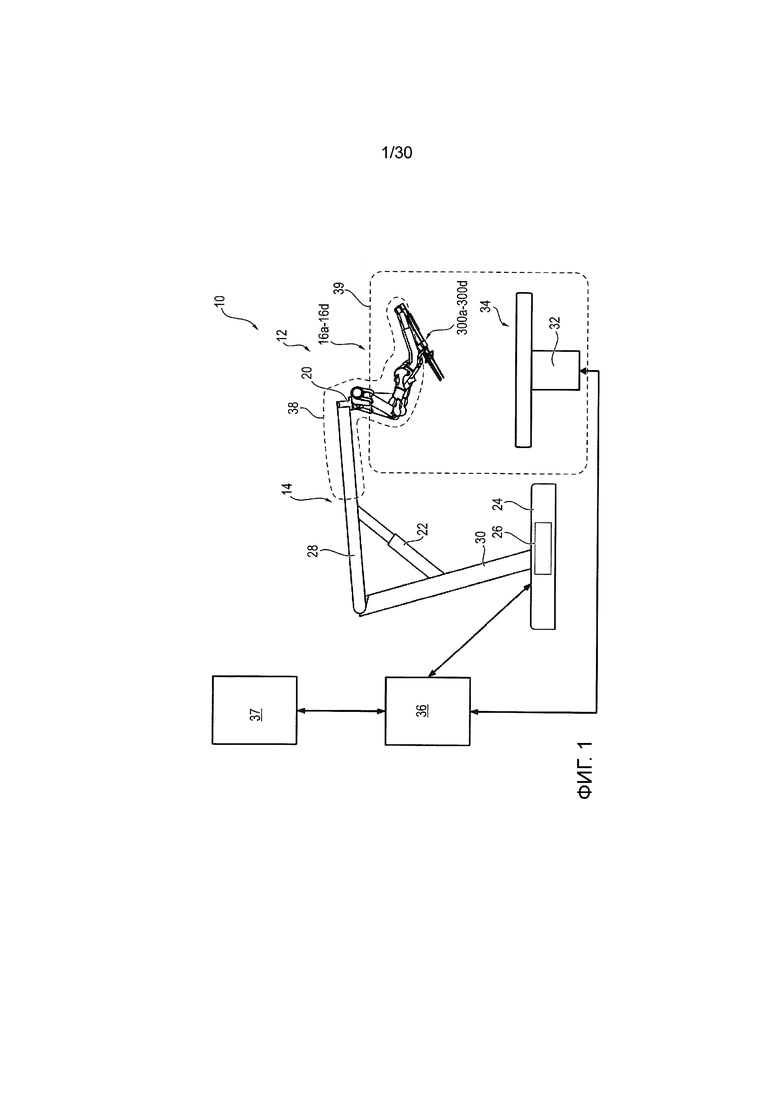
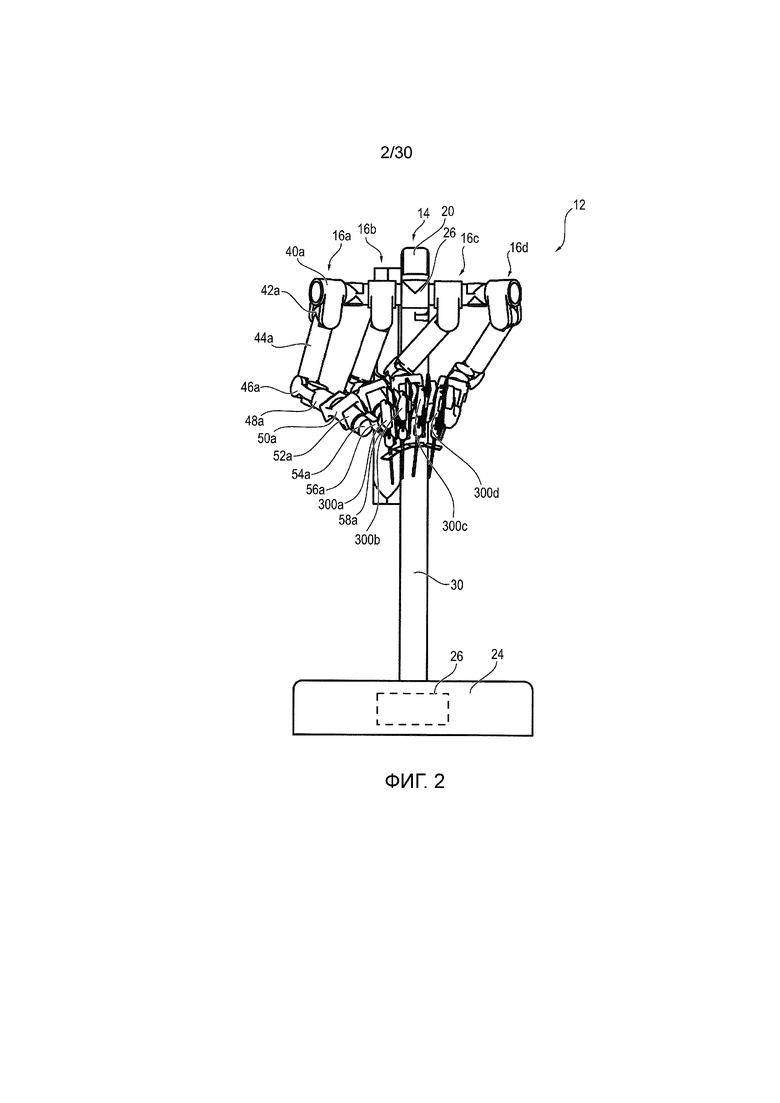
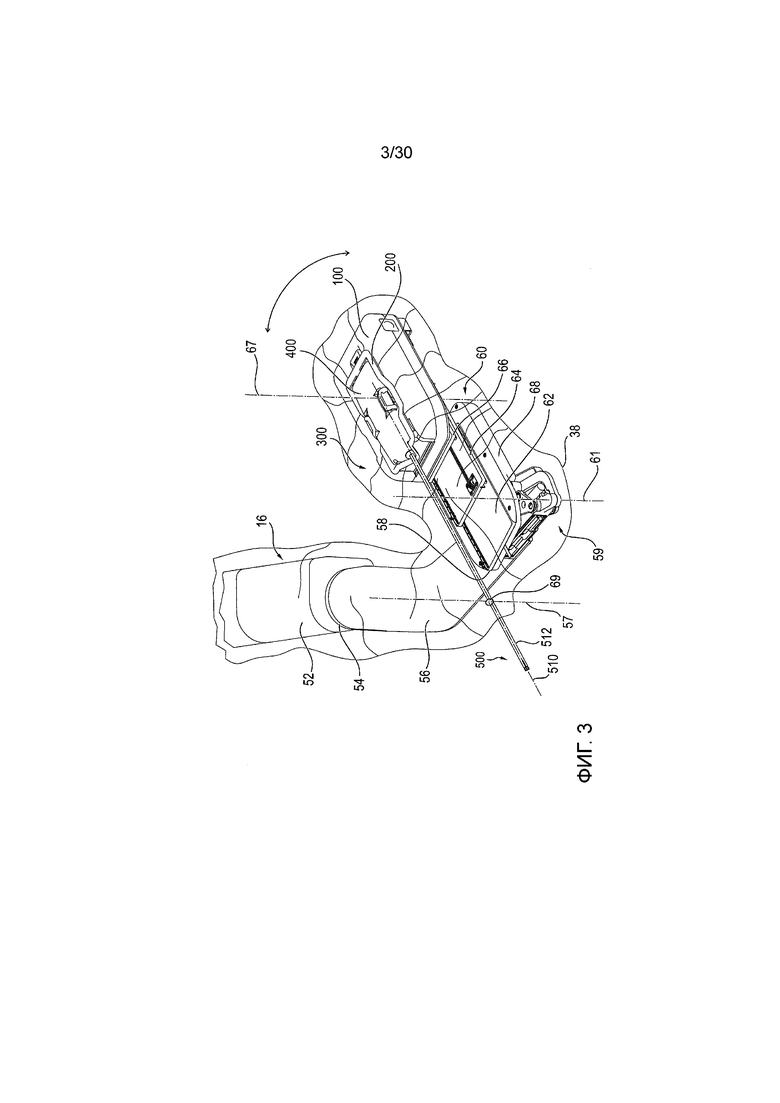
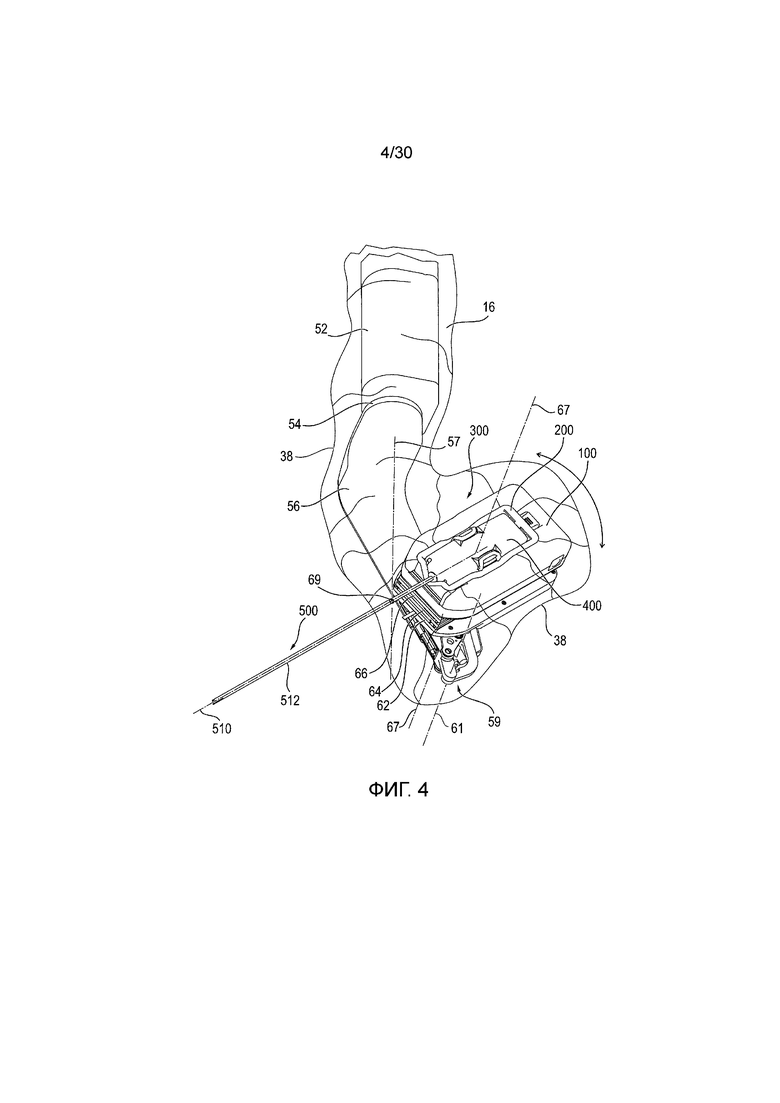
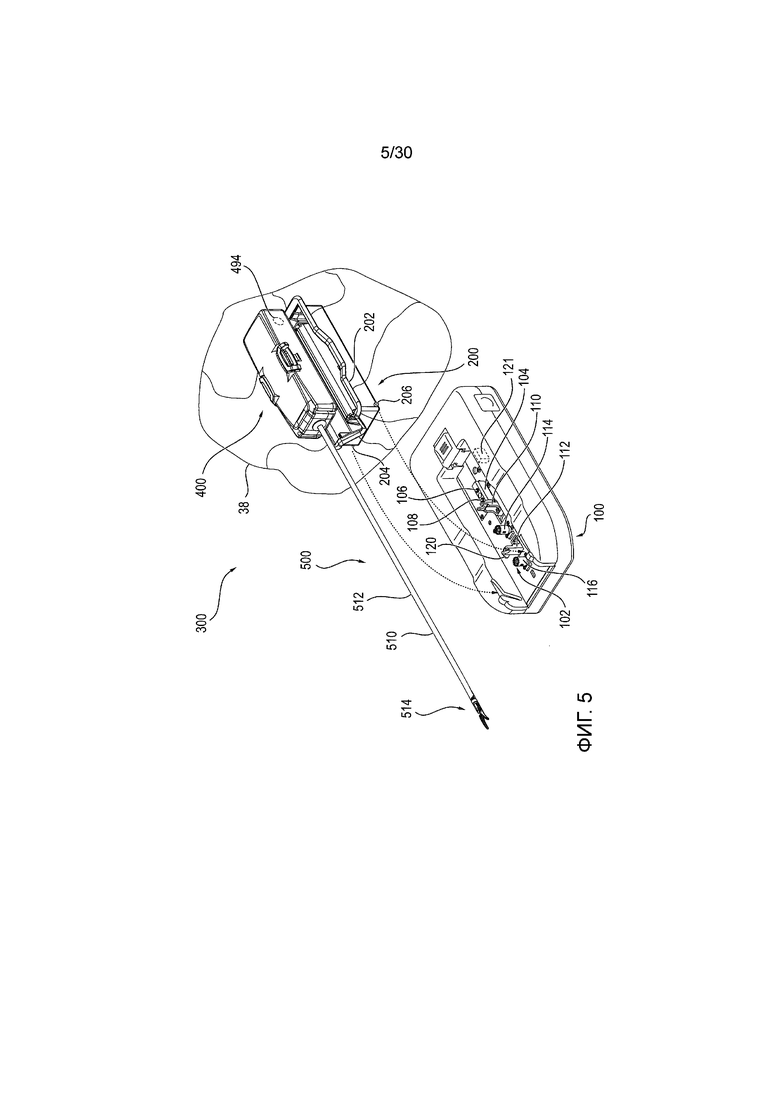
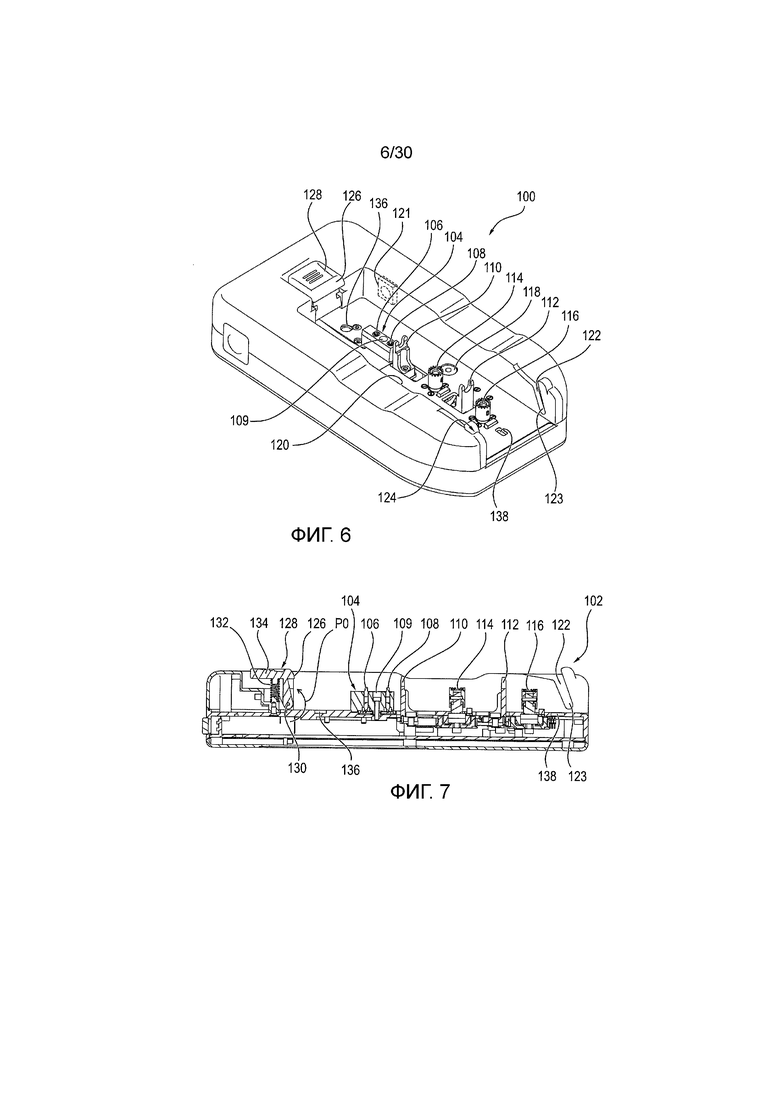
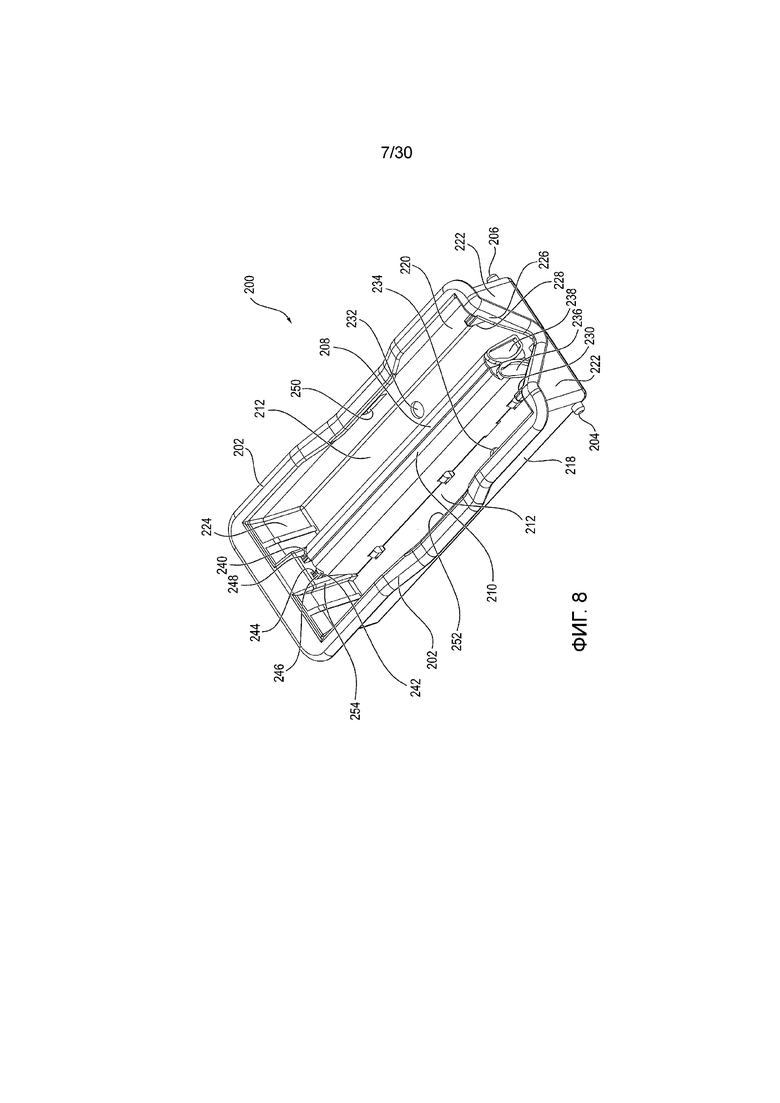
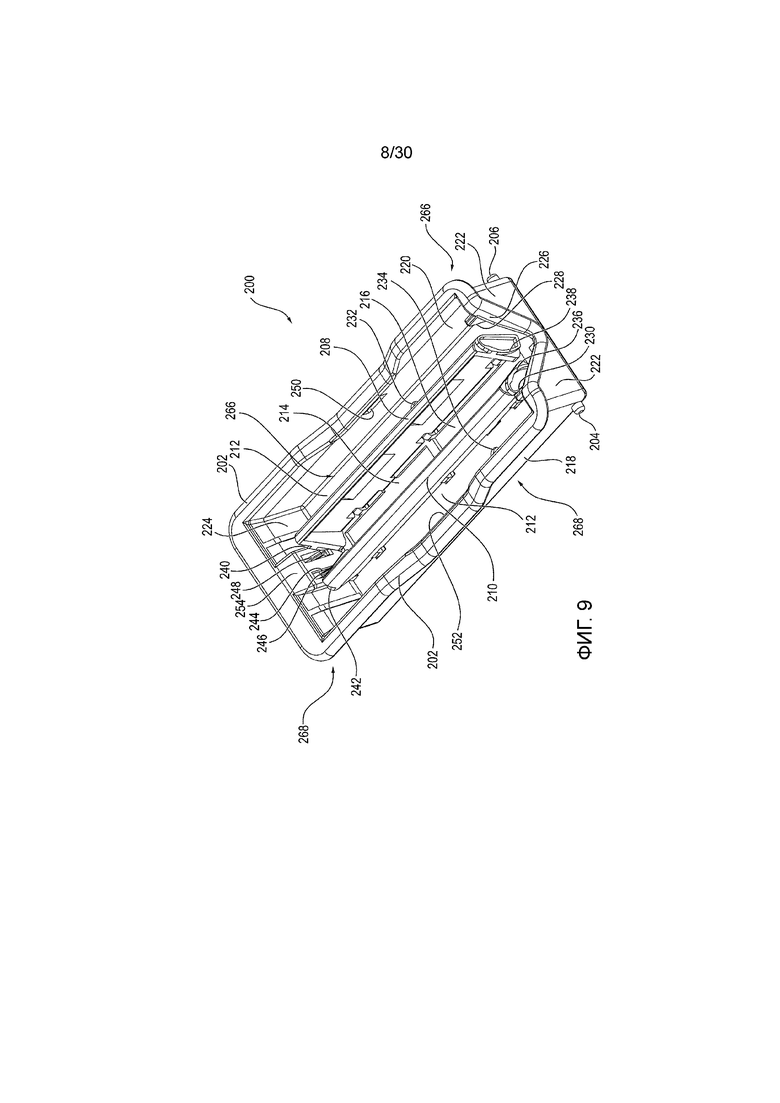
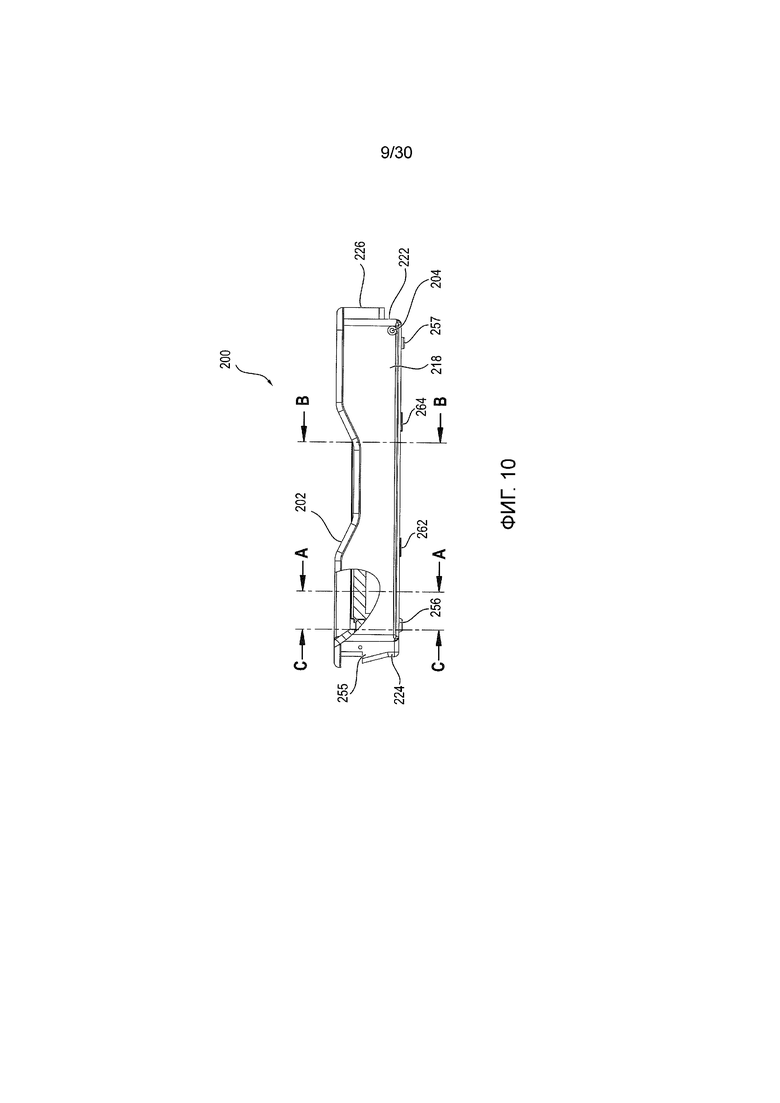
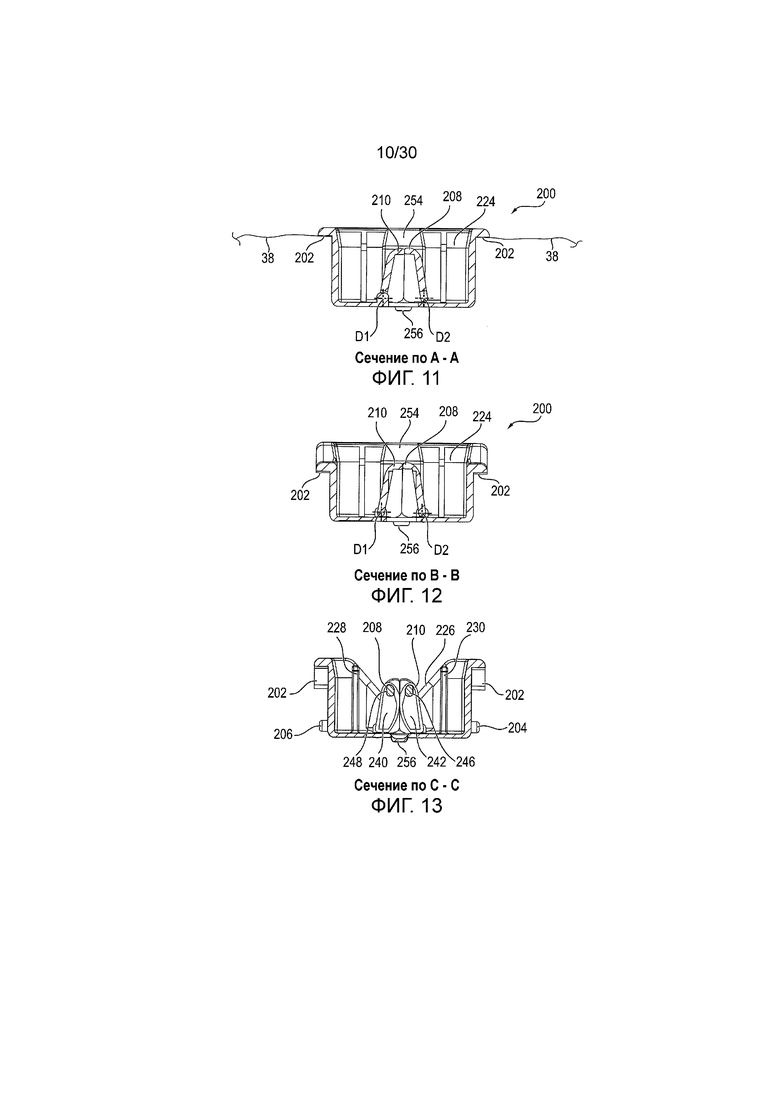
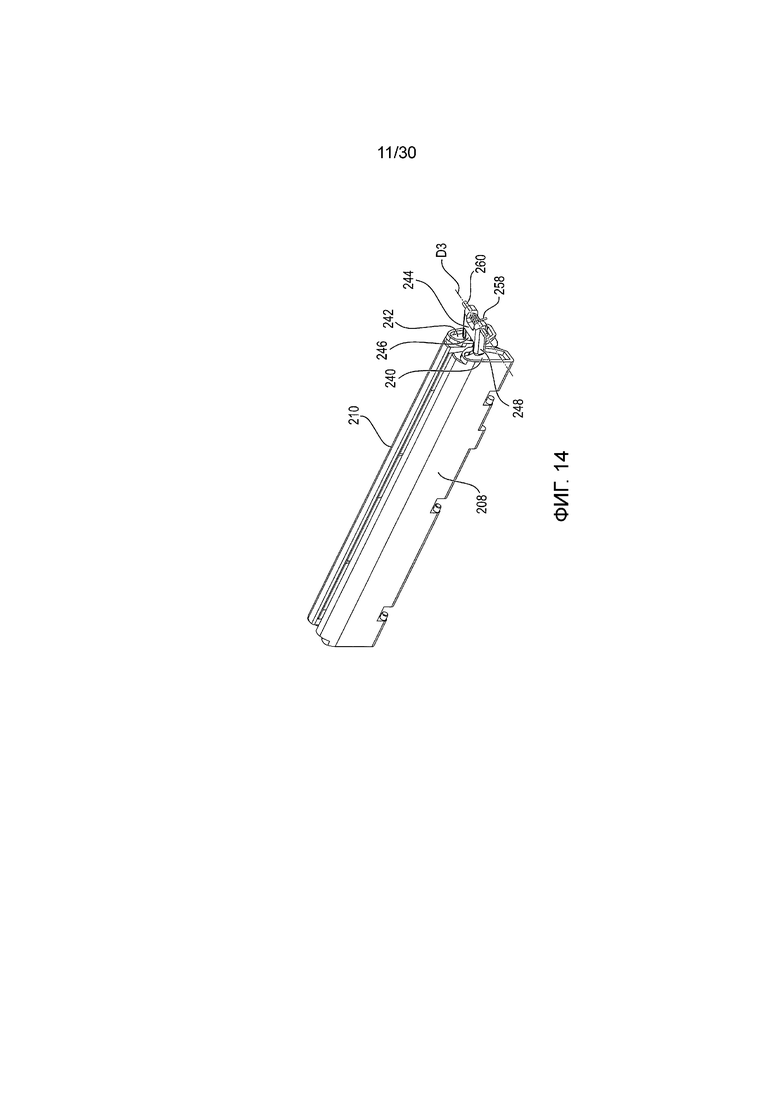
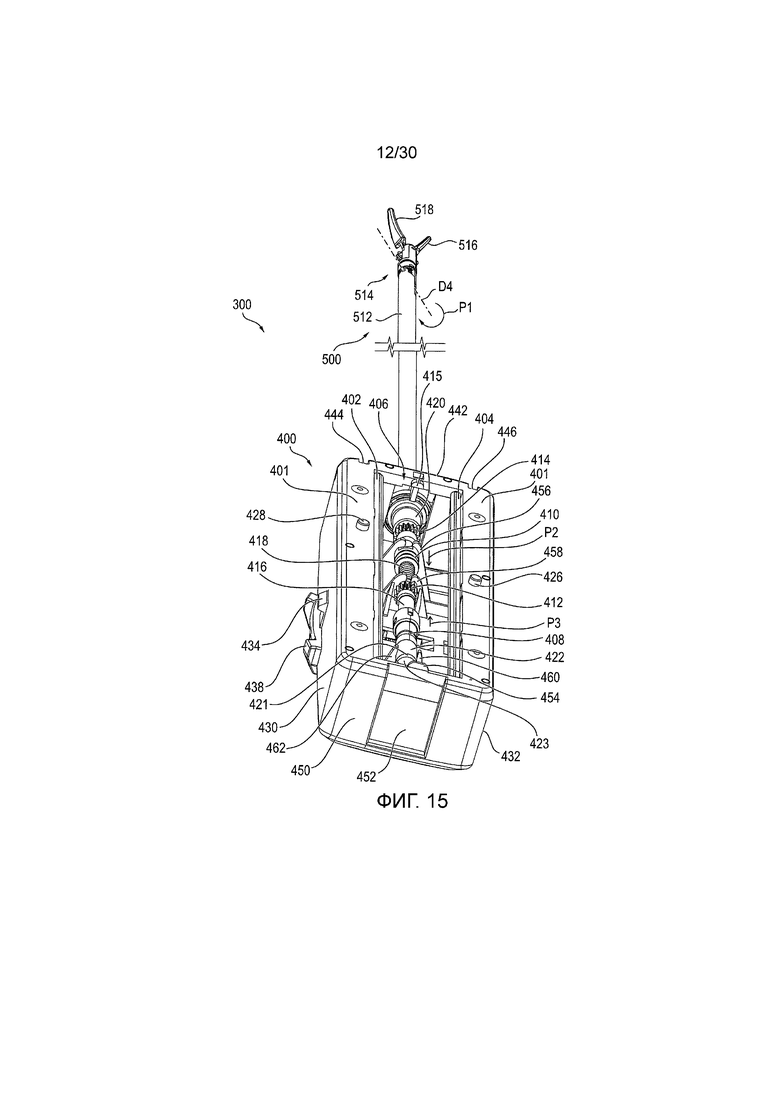
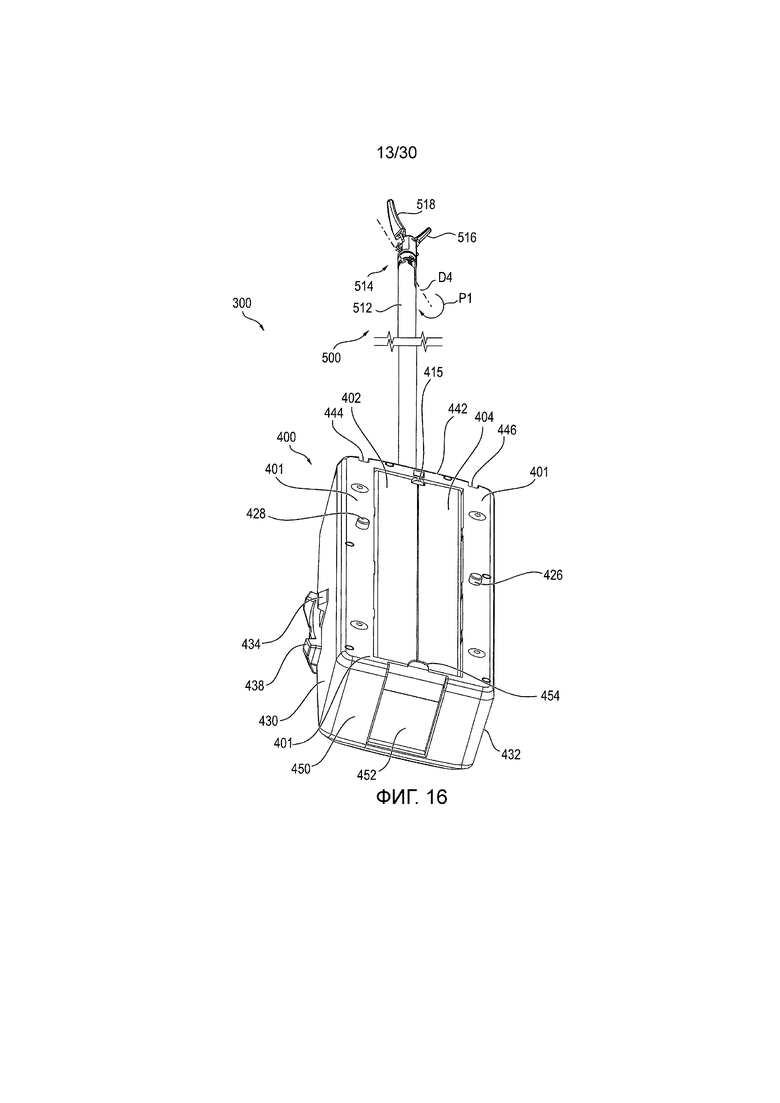
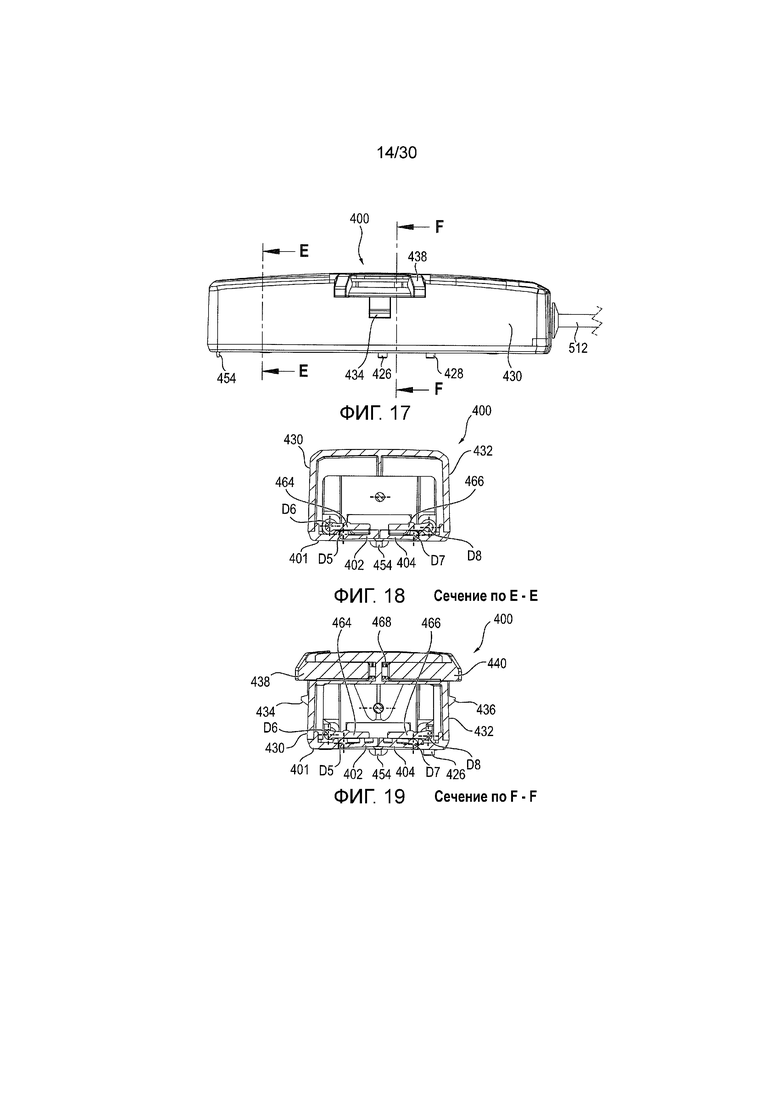
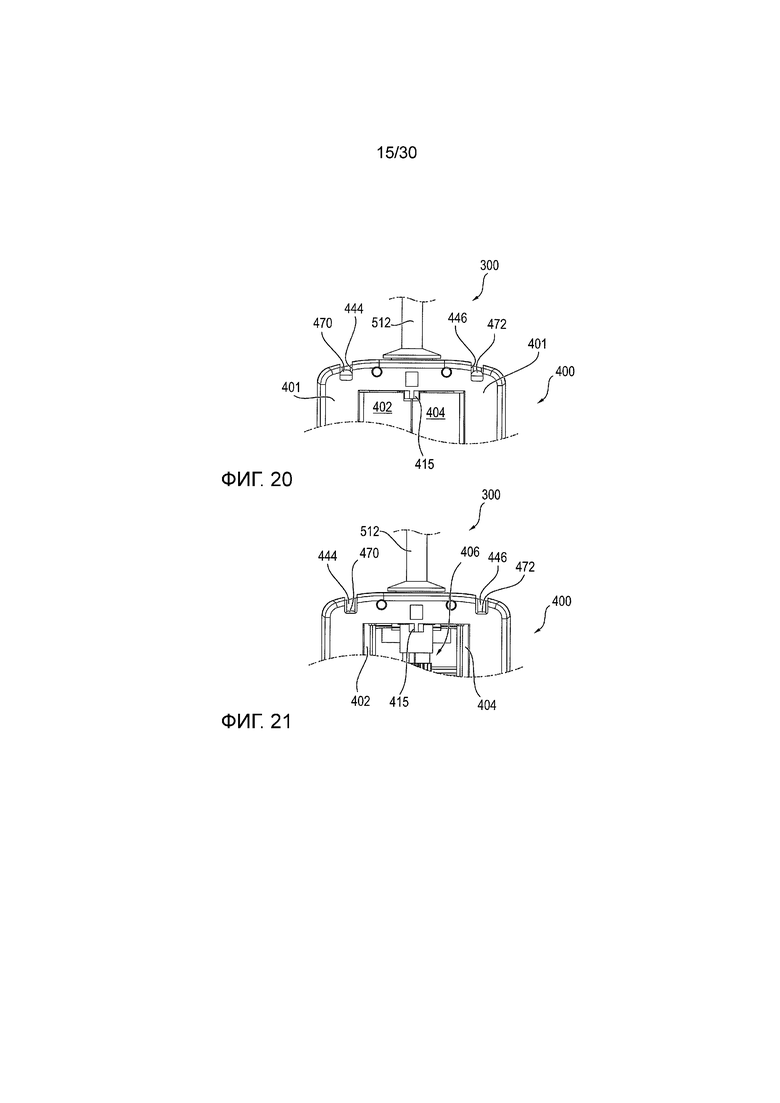
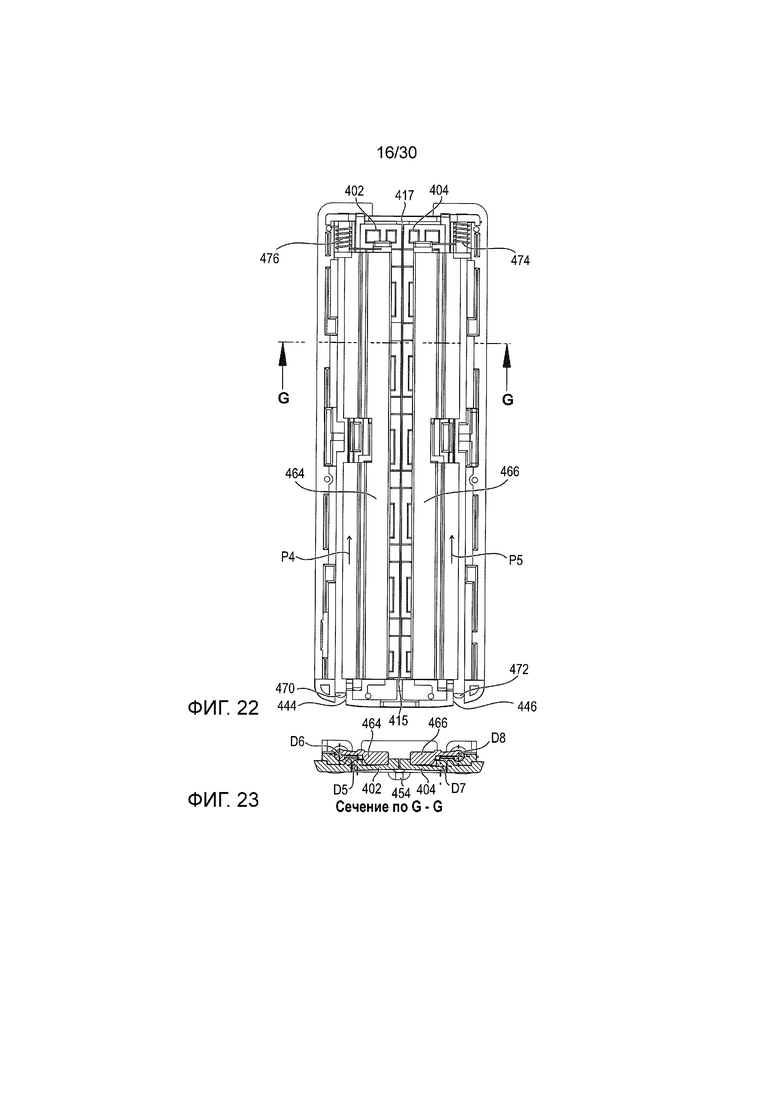
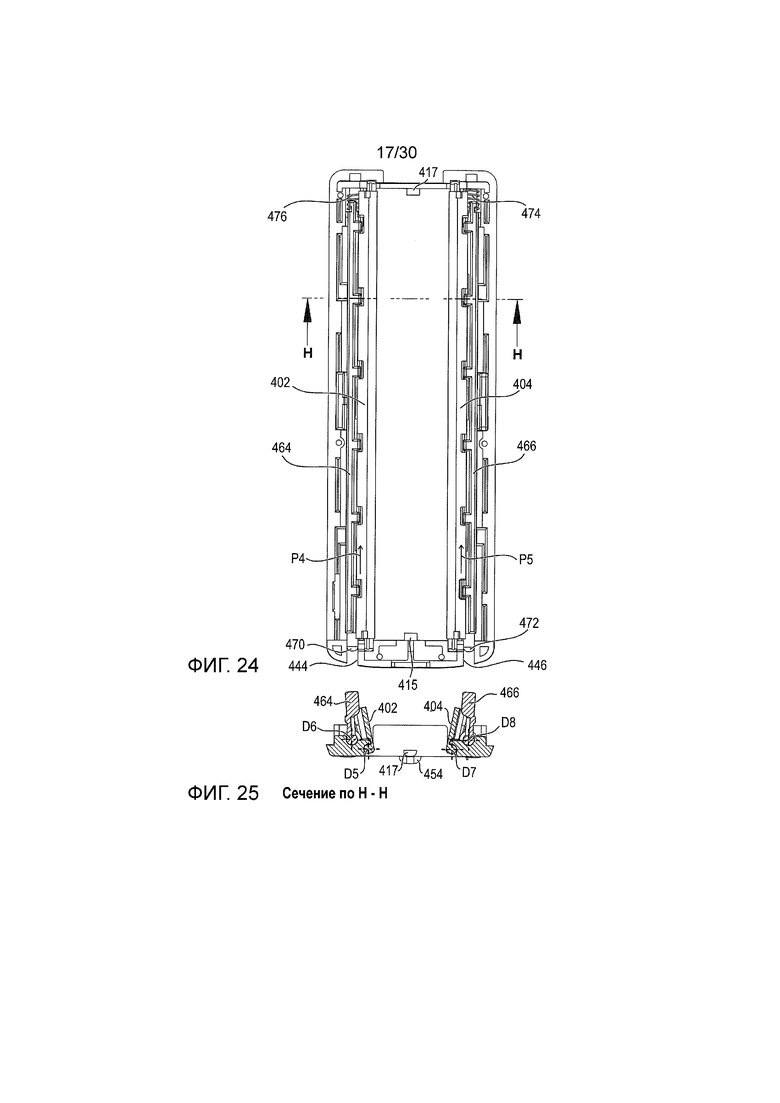
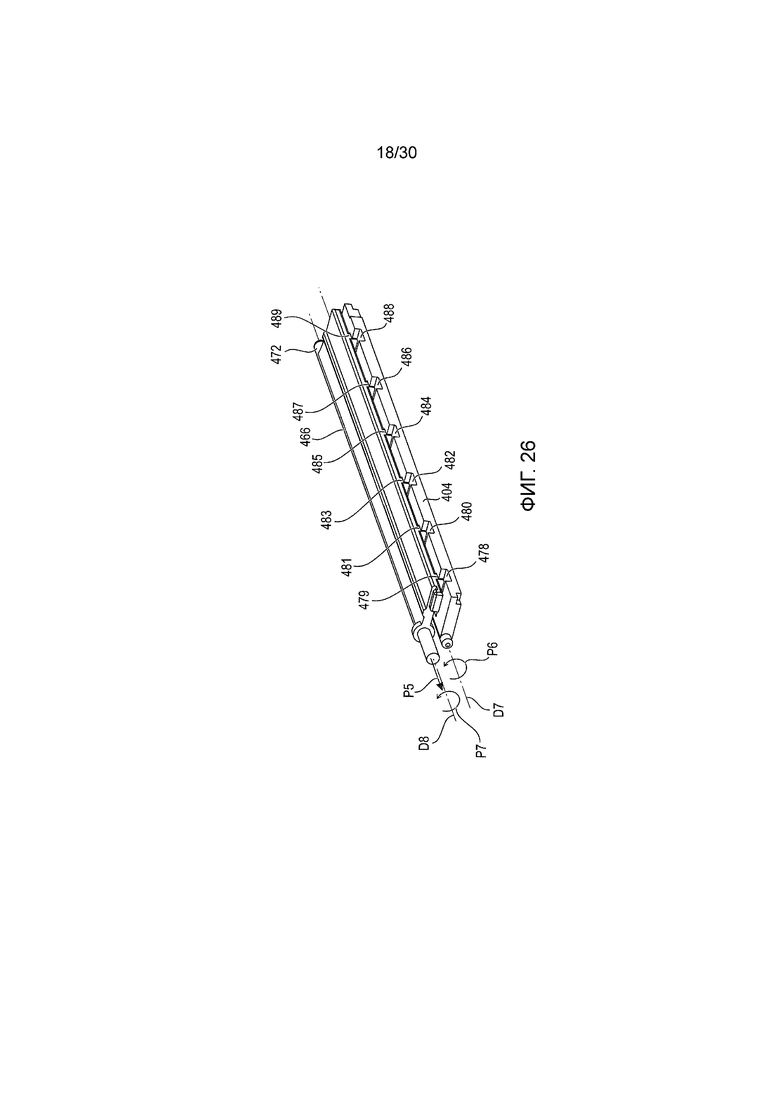
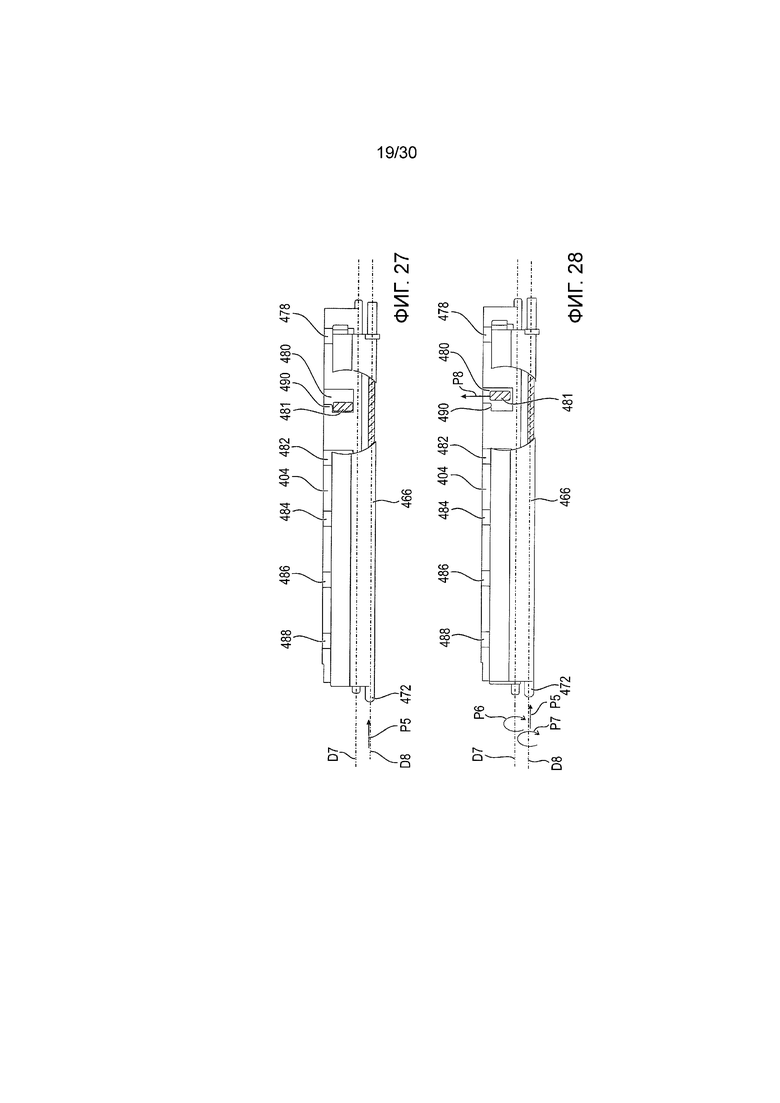
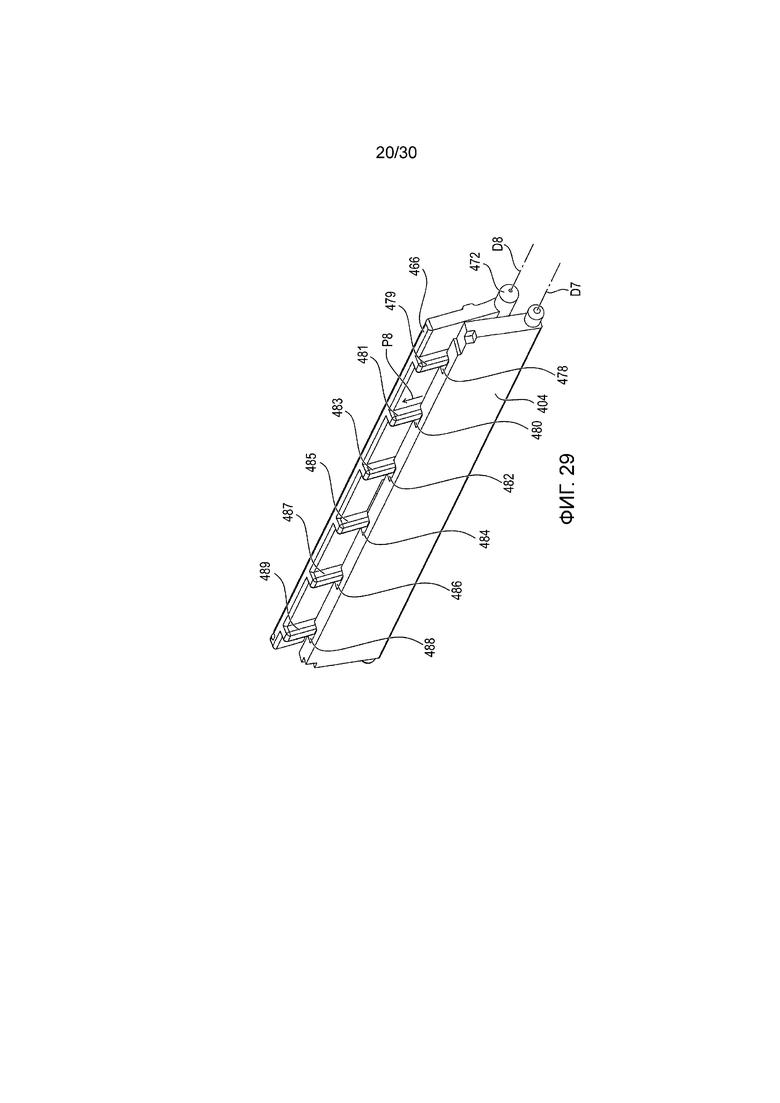
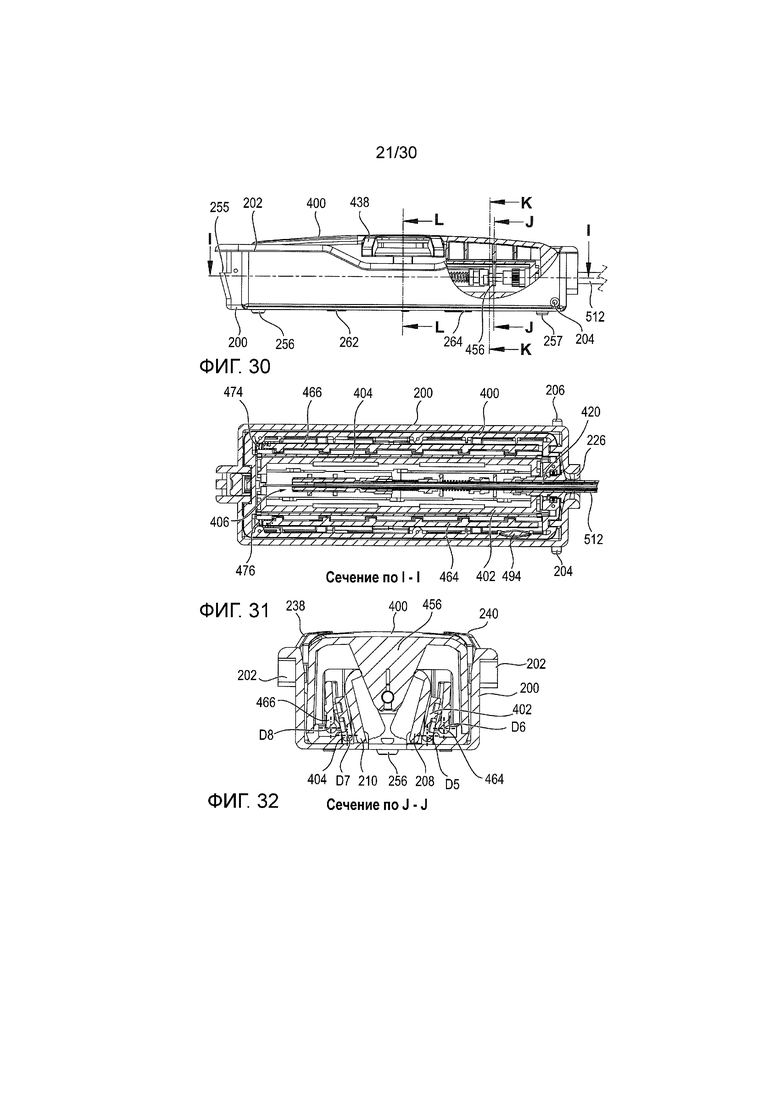
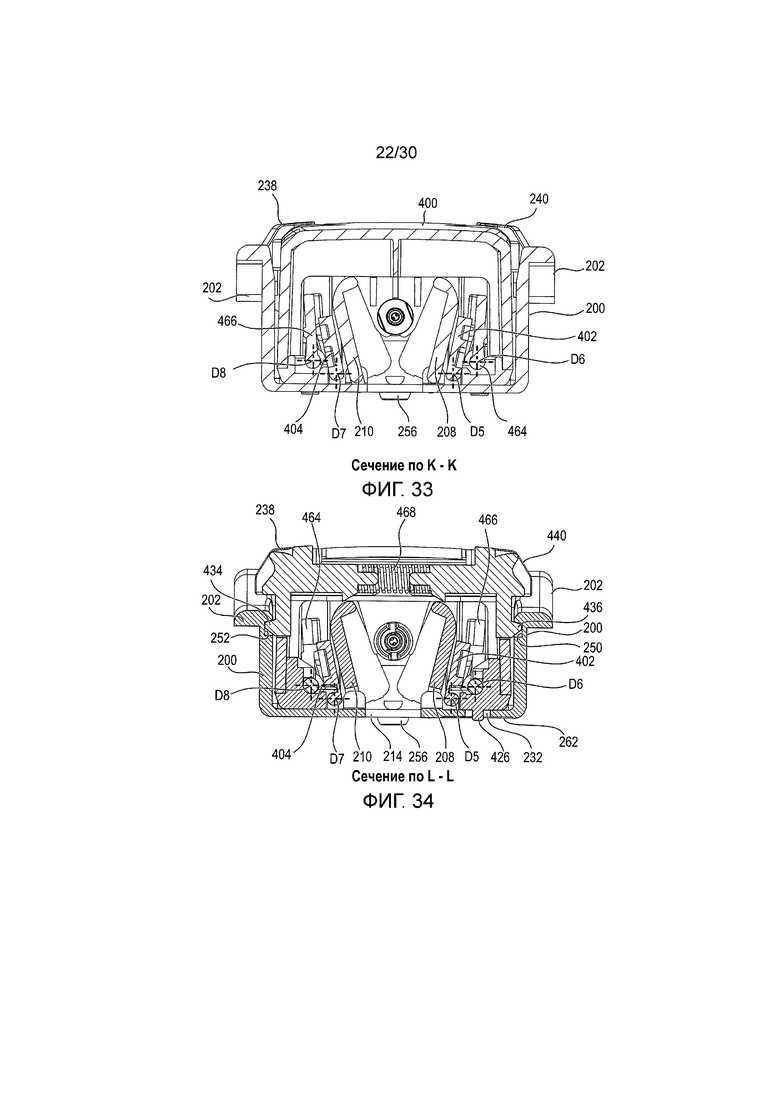
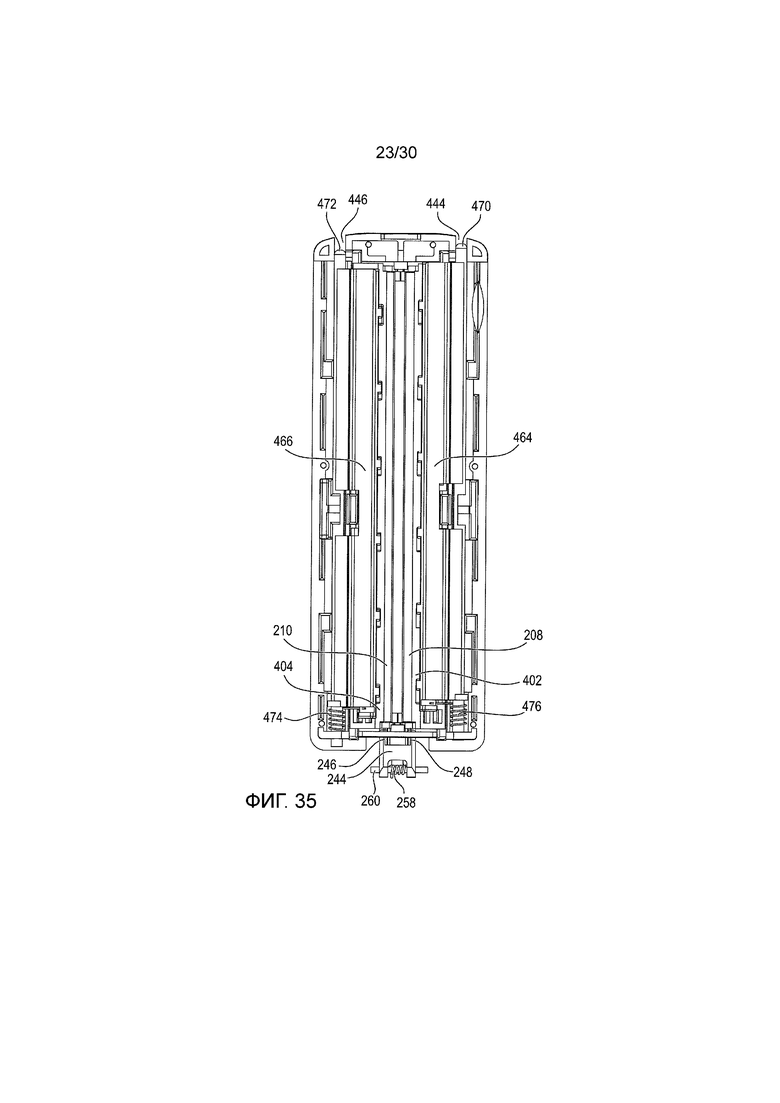
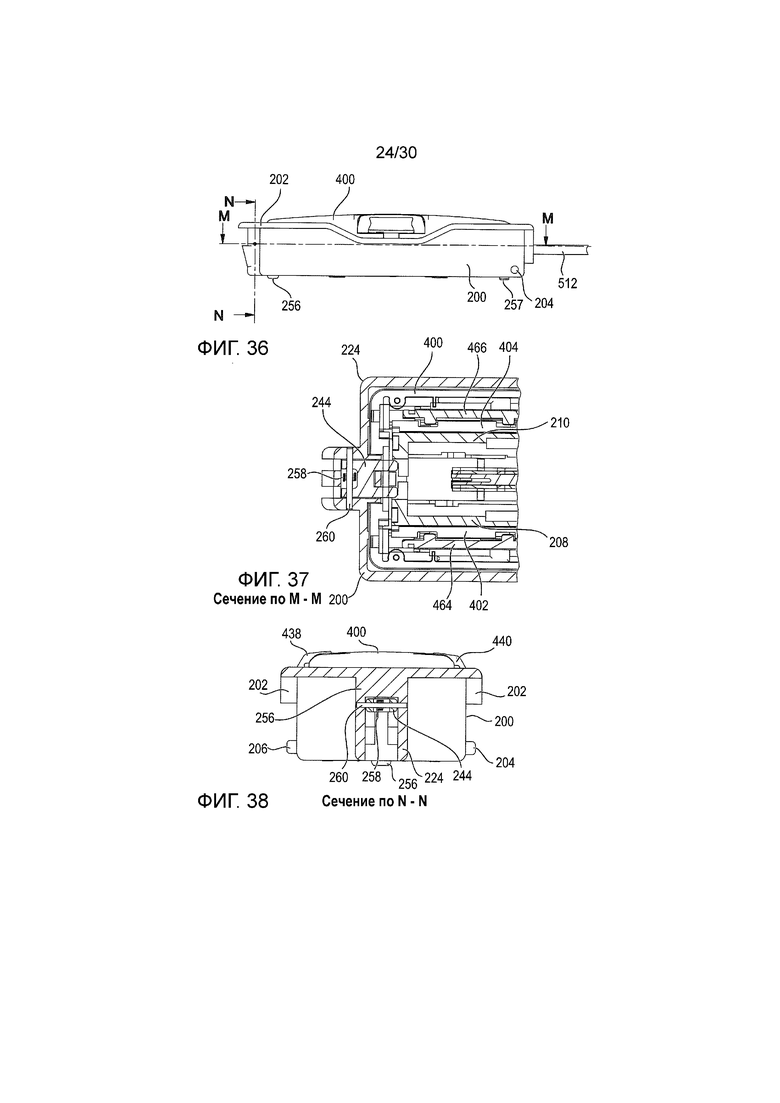
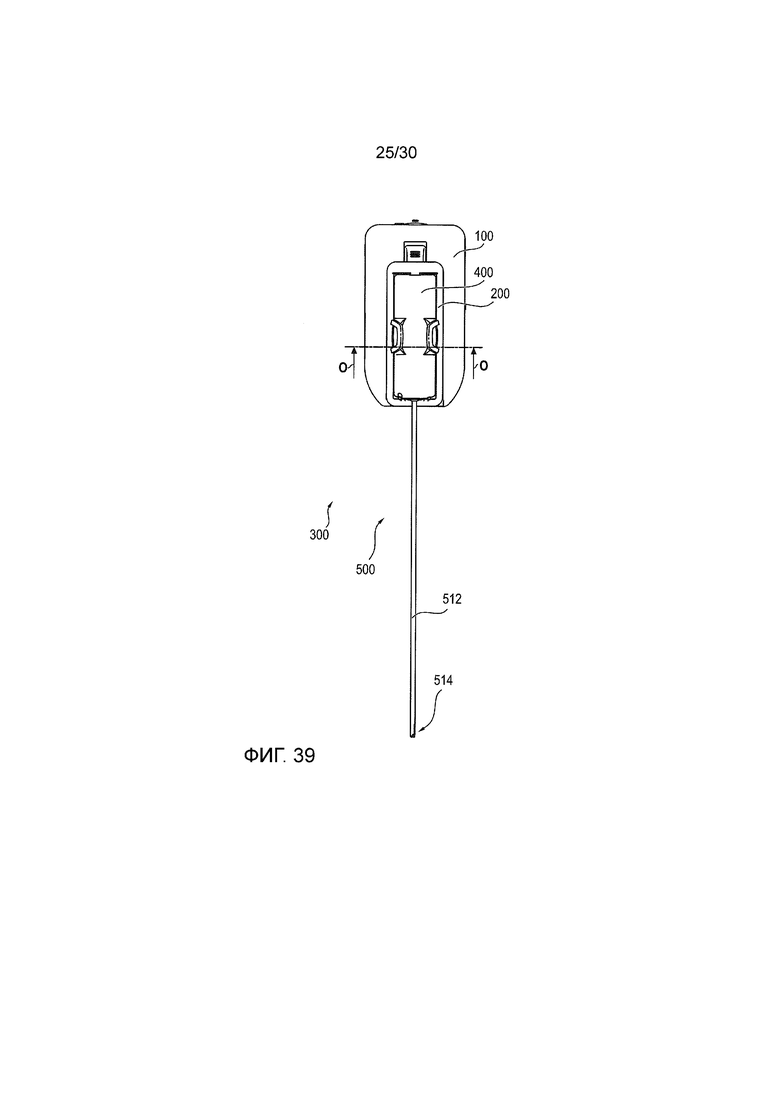
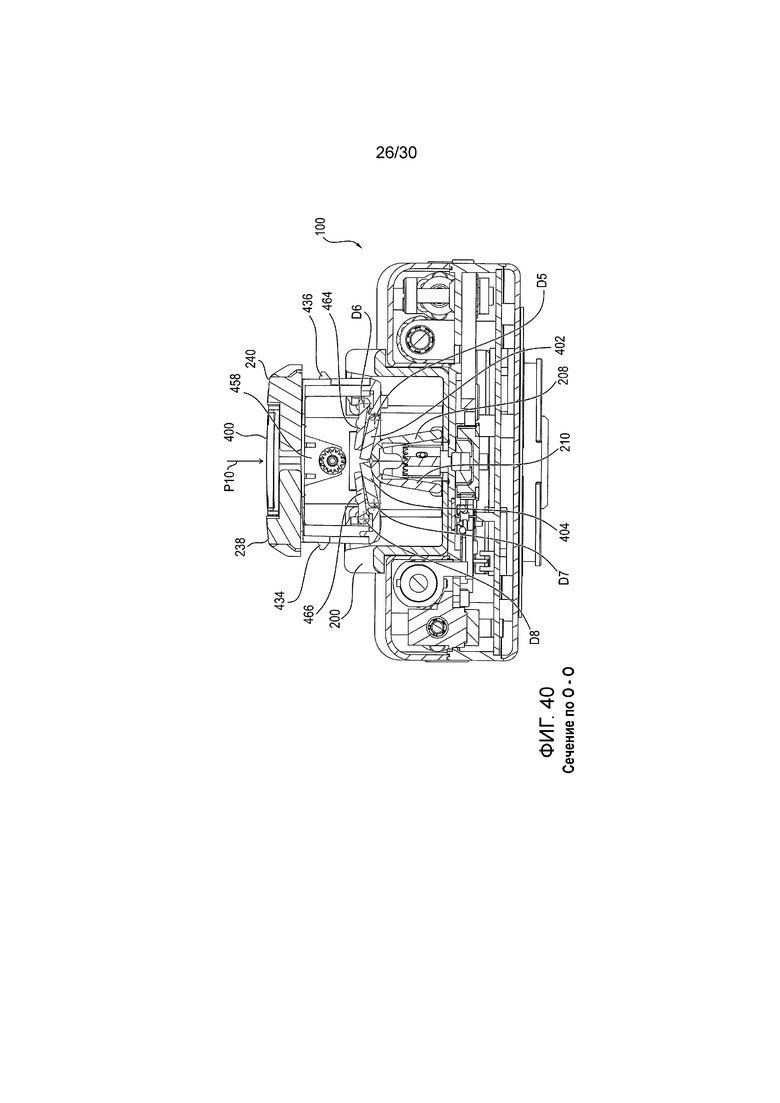
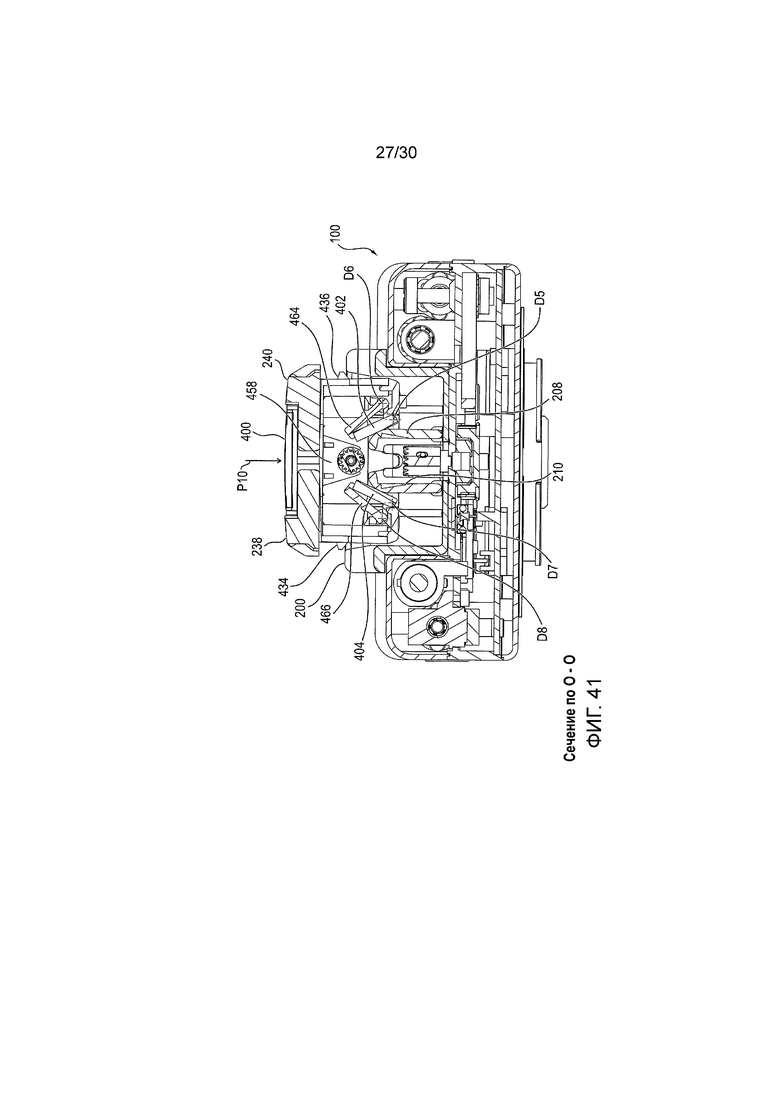
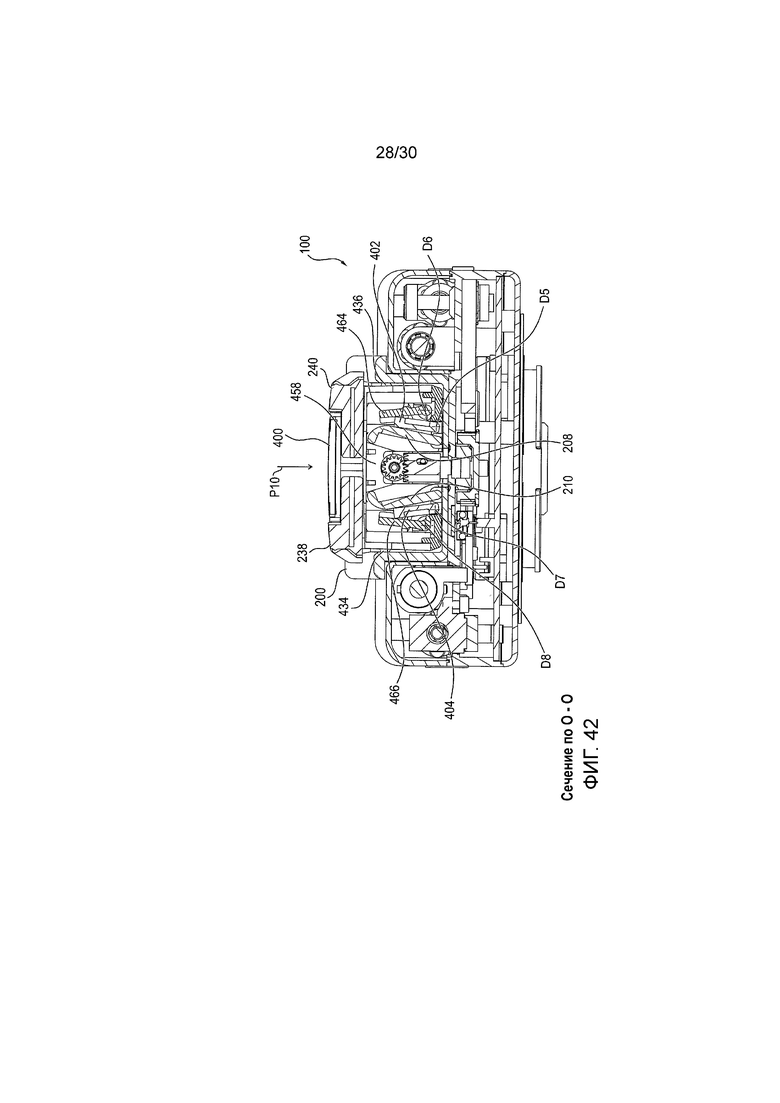
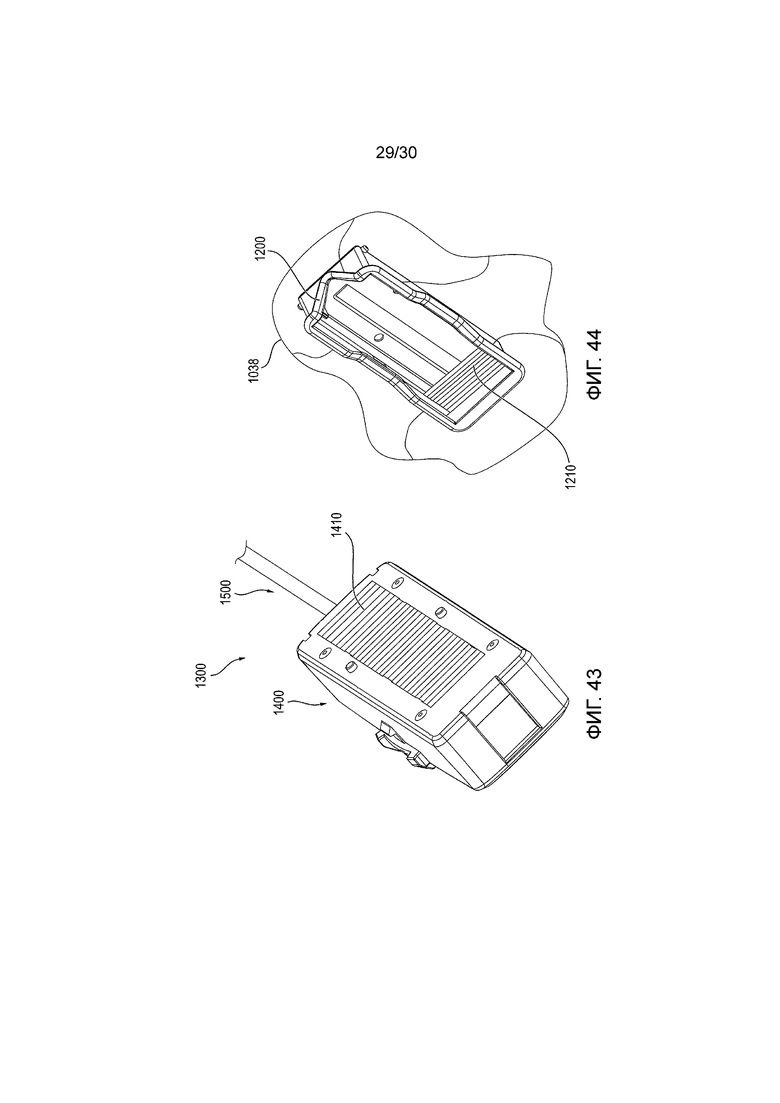
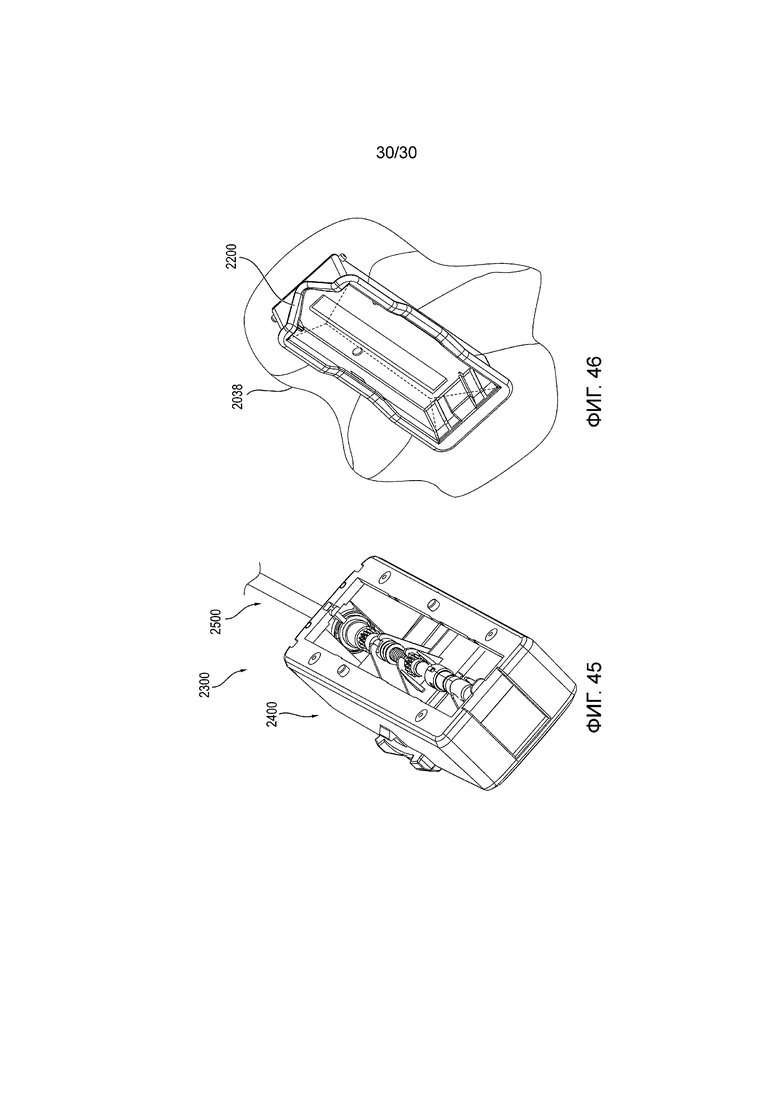
Группа изобретений относится к медицинской технике, а именно к устройству для робот-ассистированной хирургии. Устройство для робот-ассистированной хирургии содержит по меньшей мере одну нестерильную роботизированную руку с блоком связи, имеющим по меньшей мере одно первое передающее средство, по меньшей мере один расположенный в стерильной зоне стерильный блок, имеющий по меньшей мере одно второе передающее средство, стерильный чехол для отгораживания по меньшей мере части роботизированной руки от стерильной зоны. Стерильный чехол содержит стерильный шлюз, посредством которого обеспечивается соединение с блоком связи и со стерильным блоком. Стерильный шлюз имеет по меньшей мере один клапан шлюза. Клапан шлюза в закрытом состоянии стерильно отгораживает первое передающее средство. При соединении стерильного блока со стерильным шлюзом происходит перевод клапана шлюза из закрытого состояния в открытое состояние с обеспечением возможности непосредственной передачи между первым передающим средством и вторым передающим средством через отверстие, освобожденное клапанами шлюза в открытом состоянии. При отделении стерильного блока от стерильного шлюза происходит перевод клапана шлюза из открытого состояния в закрытое состояние, так что клапан шлюза после отделения отгораживает первое передающее средство от стерильной зоны. Система для робот-ассистированной хирургии, в частности, для робот-ассистированной дистанционно-управляемой процедуры внутри стерильной зоны содержит по меньшей мере одно вышеуказанное устройство для робот-ассистированной хирургии, по меньшей мере одно устройство визуализации, по меньшей мере один блок ввода для введения по меньшей мере одной команды ввода, блок управления. Стерильный шлюз для соединения блока связи роботизированной руки со стерильным блоком содержит первую соединительную область для соединения стерильного шлюза с нестерильным блоком связи, вторую соединительную область для соединения стерильного шлюза с расположенным в стерильной зоне стерильным блоком, окружную третью соединительную область для соединения стерильного шлюза с гибким стерильным чехлом для отгораживания стерильной зоны от нестерильных элементов. Стерильный шлюз имеет по меньшей мере один клапан шлюза. Клапан шлюза в закрытом состоянии стерильно запирает отверстие между первой соединительной областью и второй соединительной областью. Клапан шлюза в открытом состоянии освобождает отверстие между первой соединительной областью и второй соединительной областью. Способ стерильного отгораживания роботизированной руки для робот-ассистированной хирургии, в частности, с использованием вышеуказанного устройства для робот-ассистированной хирургии, вышеупомянутой системы робот-ассистированной хирургии или вышеприведенного стерильного шлюза, при котором нестерильную роботизированную руку с помощью стерильного чехла и интегрированного в этот чехол стерильного шлюза отгораживают от стерильной зоны. Нестерильный блок связи роботизированной руки соединяют с первой соединительной областью стерильного шлюза, так что клапан стерильного шлюза в закрытом состоянии стерильно запирает отверстие по меньшей мере к одному расположенному в блоке связи первому передающему средству. Расположенный в стерильной зоне стерильный блок соединяют со второй соединительной областью стерильного шлюза. Клапан шлюза автоматически открывается. Отверстие соединяет первую соединительную область со второй соединительной областью, так что обеспечивается передача между первым передающим средством блока связи и вторым передающим средством стерильного блока. Стерильный блок отделяют от второй соединительной области, причем клапан шлюза автоматически закрывается, и отверстие стерильно запирается. Группа изобретений обеспечивает возможность предотвращения риска перекрестного бактериального загрязнения. 4 н. и 13 з.п. ф-лы, 46 ил.
1. Устройство для робот-ассистированной хирургии, содержащее
по меньшей мере одну нестерильную роботизированную руку (16) с блоком (100) связи, имеющим по меньшей мере одно первое передающее средство (102),
по меньшей мере один расположенный в стерильной зоне (39) стерильный блок (400), имеющий по меньшей мере одно второе передающее средство (406),
стерильный чехол для отгораживания по меньшей мере части роботизированной руки (16) от стерильной зоны (39),
отличающееся тем, что стерильный чехол содержит стерильный шлюз (200), посредством которого обеспечивается соединение с блоком (100) связи и со стерильным блоком (400), причем
стерильный шлюз (200) имеет по меньшей мере один клапан (208, 210) шлюза, причем
клапан (208, 210) шлюза в закрытом состоянии стерильно отгораживает первое передающее средство (102), причем
при соединении стерильного блока (400) со стерильным шлюзом (200) происходит перевод клапана (208, 210) шлюза из закрытого состояния в открытое состояние с обеспечением возможности непосредственной передачи между первым передающим средством (102) и вторым передающим средством (406) через отверстие (214, 216), освобожденное клапанами (208, 210) шлюза в открытом состоянии, и
при отделении стерильного блока (400) от стерильного шлюза (200) происходит перевод клапана (208, 210) шлюза из открытого состояния в закрытое состояние, так что клапан (208, 210) шлюза после отделения отгораживает первое передающее средство (102) от стерильной зоны (39).
2. Устройство по п. 1, отличающееся тем, что стерильный блок (400) имеет по меньшей мере один стерильный клапан (402, 404), который в закрытом состоянии стерильно отгораживает второе передающее средство (406); причем при соединении стерильного блока (400) со стерильным шлюзом (200) происходит перевод клапана (208, 210) шлюза и стерильного клапана (402, 404) из закрытого состояния в открытое состояние с обеспечением непосредственной передачи между первым передающим средством (102) и вторым передающим средством (406) через отверстие (214, 216), освобожденное клапаном (208, 210) шлюза и стерильным клапаном (402, 404) в открытом состоянии; и при отделении стерильного блока (400) от стерильного шлюза (200) происходит перевод клапана (208, 210) шлюза и стерильного клапана (402, 404) из открытого состояния в закрытое состояние, так что клапан (208, 210) шлюза после отделения отгораживает первое передающее средство (102), а стерильный клапан (402, 404) после отделения отгораживает второе передающее средство (406) от стерильной зоны (39).
3. Устройство по п. 1 или 2, отличающееся тем, что
первое передающее средство (102) блока (100) связи содержит по меньшей мере один приводной элемент (110-116) и/или по меньшей мере один первый электрический передающий элемент (104), и/или по меньшей мере один оптический передающий элемент (109),
второе передающее средство (406) стерильного блока (400) содержит по меньшей мере один приводимый элемент (408-414) и/или по меньшей мере один электрический контакт (422, 423), и/или по меньшей мере один оптический передающий элемент (421),
стерильный шлюз (200) с блоком (100) связи и стерильным блоком (400) соединены таким образом, что указанный по меньшей мере один приводной элемент (110-116) находится в непосредственном зацеплении с указанным по меньшей мере одним приводимым элементом (408-414), и/или первый электрический передающий элемент (104) непосредственно соединен с электрическим контактом (122, 123), и/или оптический передающий элемент (109) блока (100) связи непосредственно соединен с оптическим передающим элементом (421) стерильного блока (400).
4. Устройство по любому из предыдущих пунктов, отличающееся тем, что блок (100) связи расположен на проксимальном конце роботизированной руки (16), причем
стерильный блок (400) является компонентом хирургического инструмента (500), эндоскопа и/или медицинского прибора, причем этот стерильный блок (400) расположен, в частности, на дистальном конце хирургического инструмента (500), эндоскопа и/или медицинского прибора, причем
блок (100) связи выполнен с возможностью соединения с первой соединительной областью (266) стерильного шлюза (200), причем
стерильный блок (400) выполнен с возможностью соединения со второй соединительной областью (268) стерильного шлюза (200), и
первая соединительная область (266) и вторая соединительная область (268) расположены предпочтительно на обращенных друг от друга сторонах стерильного шлюза (200).
5. Устройство по любому из предыдущих пунктов, отличающееся тем, что первая соединительная область (266) стерильного шлюза (200) через первое разъемное фиксирующее соединение может быть соединена с блоком (100) связи, а вторая соединительная область (268) стерильного шлюза (200) через второе разъемное фиксирующее соединение может быть соединена со стерильным блоком (400).
6. Устройство по любому из предыдущих пунктов, отличающееся тем, что блок (100) связи содержит датчик (118, 120) связи, предназначенный для детектирования наличия стерильного блока (400), корректно соединенного со стерильным шлюзом (200), причем
указанное устройство содержит блок (36) управления, допускающий передачу между первым передающим средством (102) и вторым передающим средством (406) только тогда, когда с помощью датчика (118, 120) связи был детектирован стерильный блок (400), корректно соединенный со стерильным шлюзом (200).
7. Устройство по любому из предыдущих пунктов, отличающееся тем, что блок (100) связи в качестве первого передающего средства (102) имеет приводные элементы (110-116), а стерильный блок (400) имеет приводимые элементы (408-414), причем приводные элементы (110-116) находятся в зацеплении с приводимыми элементами (408-414) для механического соединения блока (100) связи со стерильным блоком (400) при соединении стерильного блока (400) со стерильным шлюзом (200) и при соединении блока (100) связи со стерильным шлюзом (200), и/или
блок (100) связи имеет по меньшей мере один электрический контакт (106, 108) в качестве первого передающего средства (102), а стерильный блок (400) имеет по меньшей мере один ответный электрический контакт (422, 423) в качестве второго передающего средства (406), причем электрический контакт (106, 108) блока (100) связи и электрический контакт (422, 423) стерильного блока (400) при соединении блока (100) связи со стерильным шлюзом (200) и при соединении стерильного блока (400) со стерильным шлюзом (200) обеспечивают электрическое соединение между блоком (100) связи и стерильным блоком (400), в частности, для передачи высокочастотной электрической энергии, и/или
оптические передающие элементы (109, 421) образуют оптический интерфейс между блоком (100) связи и стерильным блоком (400).
8. Устройство по любому из предыдущих пунктов, отличающееся тем, что клапан (208, 210) шлюза отделяет первую соединительную область (266) от второй соединительной области (268), причем этот клапан (208, 210) шлюза при соединении стерильного блока (400) со второй соединительной областью (268) автоматически открывается, и этот клапан (208, 210) шлюза при отделении стерильного блока (400) от второй соединительной области (266) автоматически закрывается.
9. Устройство по п. 8, отличающееся тем, что клапан (208, 210) шлюза при соединении стерильного блока (400) со второй соединительной областью (268) автоматически деблокируется, и этот клапан (208, 210) шлюза при отделении стерильного блока (400) от второй соединительной области (268) автоматически блокируется.
10. Устройство по любому из предыдущих пунктов, отличающееся тем, что стерильный блок (400) имеет по меньшей мере один стерильный клапан (402, 404), который отгораживает по меньшей мере одно второе передающее средство (406), причем стерильный клапан (402, 404) при соединении стерильного блока (400) со второй соединительной областью (268) автоматически открывается, и этот стерильный клапан (402, 404) при отделении стерильного блока (400) от второй соединительной области (268) автоматически закрывается.
11. Устройство по п. 10, отличающееся тем, что стерильный клапан (402, 404) при соединении стерильного блока (400) со второй соединительной областью (268) автоматически деблокируется, и этот стерильный клапан (402, 404) при отделении стерильного блока (400) от второй соединительной области (268) автоматически блокируется.
12. Устройство по любому из предыдущих пп. 4-11, отличающееся тем, что при соединении стерильного блока (400) со второй соединительной областью (268) стерильного шлюза (200) стерильная внешняя сторона стерильного клапана (402, 404) и стерильная внешняя сторона клапана (208, 210) шлюза расположены противоположно друг другу, когда стерильный клапан (204, 404) и клапан (208, 210) шлюза открыты, причем стерильные внешние стороны стерильного клапана (402, 404) и клапана (208, 210) шлюза в открытом состоянии обращены друг к другу, предпочтительно могут касаться друг друга или едва касаются друг друга.
13. Система для робот-ассистированной хирургии, в частности, для робот-ассистированной дистанционно-управляемой процедуры внутри стерильной зоны (39), содержащая
по меньшей мере одно устройство по любому из пп. 1-12,
по меньшей мере одно устройство визуализации, которое выдает по меньшей мере одно изображение операционного поля в режиме реального времени,
по меньшей мере один блок ввода (37) для введения по меньшей мере одной команды ввода,
блок управления (9), который позиционирует роботизированную руку (16) и стерильный блок (400), соединенный через стерильный шлюз (200) с блоком (100) связи роботизированной руки (16), в зависимости от команды ввода с помощью по меньшей мере одного приводного блока.
14. Стерильный шлюз для соединения блока связи роботизированной руки со стерильным блоком, содержащий
первую соединительную область (266) для соединения стерильного шлюза (200) с нестерильным блоком (100) связи,
вторую соединительную область (268) для соединения стерильного шлюза (200) с расположенным в стерильной зоне стерильным блоком (400),
окружную третью соединительную область (202) для соединения стерильного шлюза (200) с гибким стерильным чехлом (для отгораживания стерильной зоны от нестерильных элементов (16, 100),
отличающийся тем, что этот стерильный шлюз (200) имеет по меньшей мере один клапан (208, 210) шлюза, причем
клапан (208, 210) шлюза в закрытом состоянии стерильно запирает отверстие (214, 216) между первой соединительной областью (266) и второй соединительной областью (268),
клапан (208, 210) шлюза в открытом состоянии освобождает отверстие (214, 216) между первой соединительной областью (266) и второй соединительной областью (268).
15. Стерильный шлюз по п. 14, отличающийся тем, что этот стерильный шлюз (200) выполнен таким образом, что, когда стерильный шлюз (200) соединен с блоком (100) связи, при соединении стерильного блока (400) со стерильным шлюзом (200) происходит перевод клапана (208, 210) шлюза из закрытого состояния в открытое состояние с обеспечением возможности непосредственной передачи между первым передающим средством (102) блока (100) связи и вторым передающим средством (406) стерильного блока (400) через отверстие (214, 216), освобожденное клапанами (208, 210) шлюза в открытом состоянии, и
при отделении стерильного блока (400) от стерильного шлюза (200) происходит перевод клапана (208, 210) шлюза из открытого состояния в закрытое состояние, так что клапан (208, 210) шлюза после отделения отгораживает первое передающее средство (102) от стерильной зоны, и этот клапан (208, 210) шлюза в закрытом состоянии предпочтительно заблокирован.
16. Способ стерильного отгораживания роботизированной руки для робот-ассистированной хирургии, в частности, с использованием устройства по любому из пп. 1-12, системы по п. 13 или стерильного шлюза по п. 14 или 15, при котором
нестерильную роботизированную руку (16) с помощью стерильного чехла и интегрированного в этот чехол стерильного шлюза (200) отгораживают от стерильной зоны (39), отличающийся тем, что нестерильный блок (100) связи роботизированной руки (16) соединяют с первой соединительной областью (266) стерильного шлюза (200), так что клапан (208, 210) стерильного шлюза (200) в закрытом состоянии стерильно запирает отверстие (214, 216) по меньшей мере к одному расположенному в блоке (100) связи первому передающему средству (102),
расположенный в стерильной зоне (39) стерильный блок (400) соединяют со второй соединительной областью (268) стерильного шлюза (200), причем клапан (208, 210) шлюза автоматически открывается, причем отверстие (214, 216) соединяет первую соединительную область (266) со второй соединительной областью (268), так что обеспечивается передача между первым передающим средством (102) блока (100) связи и вторым передающим средством (406) стерильного блока (400),
стерильный блок (400) отделяют от второй соединительной области (268), причем клапан (208, 210) шлюза автоматически закрывается, и отверстие (214, 216) стерильно запирается.
17. Способ по п. 16, отличающийся тем, что стерильный блок (400) имеет по меньшей мере один стерильный клапан (402, 404); причем второе передающее средство (406) стерильно отгораживается посредством этого стерильного клапана (402, 404) в его закрытом состоянии; причем клапан (208, 210) шлюза и стерильный клапан (402, 404) при соединении стерильного блока (400) со стерильным шлюзом (200) перемещаются из закрытого состояния в открытое состояние, так что обеспечивается непосредственная передача между первым передающим средством (102) и вторым передающим средством (406) через отверстие (214, 216), освобождаемое клапаном (208, 210) шлюза и стерильным клапаном (402, 404) в открытом состоянии, а при отделении стерильного блока (400) от стерильного шлюза (200) клапан (208, 210) шлюза и стерильный клапан (402, 404) перемещаются из открытого состояния в закрытое состояние, так что после отделения первое передающее средство (102) с помощью клапана (208, 210) шлюза и второе передающее средство (406) с помощью стерильного клапана (402, 404) отгораживаются от стерильной зоны (39).
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

