Область техники
Изобретение относится к устройству и способу имплантации интраокулярного шунта в глазное яблоко.
Уровень техники
Глаукома представляет собой заболевание, при котором повреждается зрительный нерв, что приводит к прогрессирующей необратимой потере зрения. Обычно это связано с повышенным давлением жидкости (то есть, внутриглазной жидкости) в глазном яблоке. При отсутствии лечения глаукома приводит к необратимому повреждению зрительного нерва и, как следствие, к потере поля зрения, которая может прогрессировать до слепоты. Такое нарушенное поле зрения после его потери не может быть восстановлено. Глаукома является второй ведущей причиной слепоты в мире, поражающей 1 из 200 человек в возрасте до пятидесяти лет, и 1 из 10 в возрасте старше восьмидесяти лет, что составляет в общей сложности около 70 миллионов человек во всем мире.
Документально подтверждено, что для замедления глаукоматозного прогрессирования является важным снижение внутриглазного давления (ВГД). В тех случаях, когда лечение лекарственными средствами не дает результатов или не допускается, подходящим является хирургическое вмешательство. Известны хирургические способы фильтрации для снижения внутриглазного давления посредством создания пути потока жидкости между передней камерой и областью низкого давления. В глазном яблоке можно расположить интраокулярные шунты для выпуска жидкости из передней камеры в такие местоположения, как субэписклеральное пространство, субконъюнктивальное пространство, эписклеральные вены, супрахориоидальное пространство, канал Шлемма, и интрасклеральное пространство.
Перспективным является установка интраокулярного шунта для выпуска жидкости в интрасклеральное пространство, поскольку при этом исключается контакт с конъюнктивой и супрахориоидальным пространством. Предотвращение соприкосновения с конъюнктивой и надсосудистой пластинкой является важным, поскольку это уменьшает раздражение, воспаление и тканевую реакцию, которая может привести к фиброзу и уменьшению возможности оттока в субконъюнктивальное и супрахориоидальное пространство. Сама конъюнктива играет ключевую роль в хирургии глаукомы для фильтрации избыточной жидкости. Менее раздраженная и здоровая конъюнктива обеспечивает формирование дренажных каналов и уменьшает вероятность воспаления и формирования рубцов тканей. Размещение интрасклерального шунта гарантирует целостность конъюнктивы и сосудистой оболочки, но может обеспечить только ограниченные пути оттока, что может повлиять на эффективность долгосрочного снижения ВГД.
Раскрытие изобретения
Способы и устройства согласно вариантам осуществления изобретения относятся к размещению интраокулярного шунта внутри глазного яблока для лечения глаукомы. Далее описаны различные способы, обеспечивающие возможность доступа хирурга к различным областям внутри глазного яблока, включая субконъюнктивальное пространство, интрасклеральное пространство, супрацилиарное пространство, супрахориоидальное пространство и эписклеральное пространство.
Например, способ лечения глаукомы может включать в себя введение интраокулярного шунта в ткани глазного яблока так, чтобы приточный конец шунта располагался в передней камере глаза, а отводящий конец шунта - между слоями теноновой капсулы.
Шунт может быть введен в глазное яблоко через роговицу, после чего он может быть продвинут в склеру, например, через угол ткани передней камеры.
Изобретение иллюстрируется различными вариантами его осуществления, которые для удобства пронумерованы (1, 2, 3 и т.д.). Они приведены в качестве примеров, не ограничивающих изобретение. Следует отметить, что любой из вариантов осуществления изобретения может быть объединен с другими в любой комбинации, например, вариант 1 осуществления изобретения или вариант 5 осуществления изобретения. Другие варианты осуществления изобретения могут быть представлены аналогичным образом.
Вариант 1 осуществления изобретения. Устройство введения для лечения глаукомы содержит корпус, имеющий дистальную часть, проксимальную часть, продольную ось, проходящую между дистальной и проксимальной частями, внутреннюю полость, и удлиненный паз, проходящий вдоль наружной поверхности корпуса в полость; иглу, имеющую просвет, подвижно соединенную с дистальной частью вдоль оси; плунжер, расположенный внутри просвета с возможностью перемещения вдоль оси, в результате чего возникает осевое усилие на шунт для проталкивания шунта в дистальном направлении относительно иглы; и скользящий элемент, соединенный с корпусом с возможностью скольжения вдоль удлиненного паза, при этом скользящий элемент входит в зацепление с компонентом привода таким образом, что дистальное перемещение скользящего элемента вдоль оси приводит к дистальному перемещению плунжера вдоль оси и проксимальному перемещению иглы вдоль оси после дистального перемещения плунжера.
Вариант 2 осуществления изобретения. Устройство введения по варианту 1, дополнительно содержащее расположенный внутри полости компонент привода, выполненный с возможностью вращения внутри полости при дистальном перемещении скользящего элемента и перемещения в результате этого вдоль оси к игле и плунжеру.
Вариант 3 осуществления изобретения. Устройство введения по любому из предыдущих вариантов, в котором паз содержит первую и вторую части, при этом дистальное перемещение скользящего элемента вдоль оси в первой части паза приводит к дистальному перемещению плунжера вдоль оси, а дистальное перемещение скользящего элемента во второй части паза приводит к проксимальному перемещению иглы вдоль оси.
Вариант 4 осуществления изобретения. Устройство введения по варианту 3, в котором дистальное перемещение скользящего элемента в первой части паза приводит к дистальному перемещению плунжера, в то время как игла остается, по существу, неподвижной относительно корпуса в осевом направлении, а дистальное перемещение скользящего элемента во второй части паза приводит к проксимальному перемещению иглы, в то время как плунжер остается, по существу, неподвижным в осевом направлении относительно корпуса.
Вариант 5 осуществления изобретения. Устройство введения по любому из предыдущих вариантов, в котором паз проходит по существу параллельно оси.
Вариант 6 осуществления изобретения. Устройство введения по любому из предыдущих вариантов, в котором длина паза меньше 12,7 см (5 дюймов).
Вариант 7 осуществления изобретения. Устройство введения по любому из предыдущих вариантов, в котором паз является линейным и проходит по существу параллельно продольной оси корпуса.
Вариант 8 осуществления изобретения. Устройство введения для лечения глаукомы, содержащее корпус, имеющий продольную ось и удлиненный паз, проходящий по существу параллельно оси на протяжении менее, чем 12,7 (5 дюймов); иглу, имеющую просвет и подвижно соединенную с корпусом; плунжер, расположенный внутри просвета и подвижно соединенный с корпусом; и скользящий элемент, соединенный с иглой и плунжером с возможностью скольжения вдоль паза, так что при скольжении указанного элемента происходит дистальное перемещение плунжера вдоль оси относительно корпуса и проксимальное перемещение иглы вдоль оси относительно корпуса.
Вариант 9 осуществления изобретения. Устройство введения по варианту 8, в котором скользящий элемент вызывает проксимальное перемещение иглы относительно корпуса после завершения дистального перемещения плунжера относительно корпуса.
Вариант 10 осуществления изобретения. Устройство введения по любому из вариантов 8 или 9, в котором длина паза меньше 10,16 см (4 дюйма).
Вариант 11 осуществления изобретения. Устройство введения по любому из вариантов 8-10, в котором длина паза меньше 7,62 (3 дюйма).
Вариант 12 осуществления изобретения. Устройство введения по любому из вариантов 8-11, в котором длина паза меньше 5,08 см (2 дюйма).
Вариант 13 осуществления изобретения. Устройство введения по любому из вариантов 8-12, в котором длина паза меньше 2,54 (1 дюйм).
Вариант 14 осуществления изобретения. Устройство введения по любому из вариантов 8-13, дополнительно содержащее компонент привода, расположенный во внутренней полости корпуса и соединенный с иглой и плунжером таким образом, что при его вращении к плунжеру прикладывается дистальное усилие, а к игле - проксимальное усилие при перемещении скользящего элемента вдоль оси.
Вариант 15 осуществления изобретения. Устройство введения по варианту 14, в котором продольная длина компонента привода больше длины прорези.
Вариант 16 осуществления изобретения. Устройство введения по любому из вариантов 14 - 15, в котором компонент привода содержит первый паз, находящийся в зацеплении с иглой, второй паз, находящийся в зацеплении с плунжером, и третий паз, находящийся в зацеплении со скользящим элементом.
Вариант 17 осуществления изобретения. Устройство введения согласно варианту 16, в котором каждый из указанных трех пазов содержит спиральную часть.
Вариант 18 осуществления изобретения. Устройство введения по любому из вариантов 8-17, дополнительно содержащее захватную часть, выступающую от наружной поверхности корпуса и выполненную с возможностью поддерживать осевое усилие, направленное против направления перемещения скользящего элемента.
Вариант 19 осуществления изобретения. Устройство введения для лечения глаукомы, содержащее иглу, имеющую просвет; плунжер, выполненный с возможностью перемещения внутри просвета; компонент привода, соединенный с иглой и плунжером так, чтобы при его вращении вызвать перемещение иглы и плунжера вдоль продольной оси устройства; и скользящий элемент, соединенный с корпусом и выполненный с возможностью скольжения вдоль удлиненного паза таким образом, что перемещение скользящего компонента вдоль оси вызывает вращение компонента привода внутри корпуса и приводит к перемещению иглы и плунжера вдоль оси.
Вариант 20 осуществления изобретения. Устройство введения согласно варианту 19, в котором компонент привода содержит цилиндрический элемент.
Вариант 21 осуществления изобретения. Устройство введения по любому из вариантов 19-20, в котором компонент привода содержит полый цилиндрический элемент.
Вариант 22 осуществления изобретения. Устройство введения по любому из вариантов 19-21, в котором компонент привода содержит несколько пазов.
Вариант 23 осуществления изобретения. Устройство введения по любому из вариантов 19-22, в котором компонент привода содержит цилиндрический элемент, имеющий паз для скользящего компонента, выполненный так, что перемещение скользящего элемента вызывает вращательное движение компонента привода.
Вариант 24 осуществления изобретения. Устройство введения по любому из вариантов 19-23, в котором компонент привода содержит цилиндрический элемент, имеющий паз для плунжера, выполненный так, что вращение компонента привода вызывает перемещение плунжера вдоль оси.
Вариант 25 осуществления изобретения. Устройство введения по любому из вариантов 19-24, в котором компонент привода содержит цилиндрический элемент, имеющий паз для иглы, выполненный так, что вращение компонента привода вызывает перемещение иглы вдоль оси.
Вариант 26 осуществления изобретения. Устройство введения по любому из вариантов 19-25, дополнительно содержащее корпус, имеющий внутреннюю полость, внутри которой удерживается компонент привода.
Вариант 27 осуществления изобретения. Устройство введения согласно варианту 26, в котором корпус содержит удлиненный паз, проходящий от наружной поверхности корпуса в полость, при этом скользящий компонент выполнен с возможностью скольжения вдоль этого паза.
Вариант 28 осуществления изобретения. Устройство введения по любому из вариантов 26-27, в котором корпус имеет дистальную часть и втулку, проходящую от дистальной части, при этом втулка содержит просвет, через который проходит игла.
Вариант 29 осуществления изобретения. Устройство введения по любому из вариантов 26-28, в котором корпус дополнительно содержит втулку, соединенную с дистальной частью корпуса, при этом втулка имеет опорную часть для прилегания к тканям глазного яблока, чтобы препятствовать или противодействовать дальнейшему перемещению устройства при соприкосновении с тканями глазного яблока.
Вариант 30 осуществления изобретения. Устройство введения по любому из вариантов 26-29, дополнительно содержащее стопор, выполненный с возможностью сцепления с наружным элементом конструкции корпуса для ограничения перемещения скользящего элемента в пазу корпуса.
Вариант 31 осуществления изобретения. Устройство введения по любому из вариантов 26-30, дополнительно содержащее стопор, проходящий, по меньшей мере частично, через паз корпуса и выполненный с возможностью зацепления с наружным элементом компонента привода для ограничения вращения компонента привода внутри корпуса.
Вариант 32 осуществления изобретения. Устройство введения по любому из вариантов 26-31, дополнительно содержащее головку, соединенную с проксимальным концом корпуса, при этом головка соединена с возможностью вращения с компонентом привода таким образом, что поворот головки вызывает вращательное движение компонента привода.
Вариант 33 осуществления изобретения. Устройство введения по любому из вариантов 19-32, дополнительно содержащее узел иглы, при этом узел иглы содержит привод иглы, который соединен с возможностью скольжения с пазом для иглы компонента привода таким образом, что вращение компонента привода вызывает перемещение привода иглы вдоль оси, при этом игла соединена с приводом иглы таким образом, что перемещение привода иглы по оси приводит к перемещению иглы вдоль оси.
Вариант 34 осуществления изобретения. Устройство введения по любому из вариантов 19-33, в котором игла соединена с поворотным регулировочным элементом, который выполнен с возможностью поворота для фиксации углового выравнивания иглы относительно корпуса.
Вариант 35 осуществления изобретения. Устройство введения по любому из вариантов 19-34, в котором игла соединена с поворотным регулировочным элементом, который соединен с приводом иглы узла иглы и выполнен с возможностью поворота относительно привода иглы таким образом, что угол поворота регулировочного элемента при его вращении изменяет угловое положение иглы относительно корпуса, при этом регулировочный элемент выполнен с возможностью поворота для фиксации углового выравнивания иглы относительно корпуса.
Вариант 36 осуществления изобретения. Устройство введения по любому из вариантов 19-35, дополнительно содержащее узел плунжера, который содержит привод плунжера, находящийся в зацеплении с возможностью скольжения с пазом плунжера компонента привода таким образом, что вращение компонента привода приводит к перемещению привода плунжера вдоль оси, при этом плунжер соединен с приводом плунжера таким образом, что перемещение привода плунжера вдоль оси приводит к перемещению плунжера вдоль оси.
Вариант 37 осуществления изобретения. Устройство введения для лечения глаукомы, содержащее корпус, имеющий дистальную часть и продольную ось; узел иглы, соединенный с дистальной частью корпуса и содержащий поворотный регулировочный элемент и соединенную с ним иглу, при этом регулировочный элемент выполнен с возможностью вращения для регулировки углового положения иглы относительно корпуса; и плунжер, выполненный с возможностью перемещения внутри просвета в игле, вызывая приложение осевого усилия к шунту, расположенному внутри просвета, для проталкивания шунта в дистальном направлении относительно иглы.
Вариант 38 осуществления изобретения. Устройство введения по варианту 37, в котором регулировочный элемент соединен с приводом иглы и выполнен с возможностью поворота относительно него таким образом, что вращение регулировочного элемента изменяет угловое положение иглы относительно корпуса, при этом привод иглы выполнен с возможностью приложения осевого усилия к регулировочному элементу, которое передается на иглу.
Вариант 39 осуществления изобретения. Устройство введения по любому из вариантов 37-38, в котором регулировочный элемент содержит штифт, проходящий в радиальном направлении от узла иглы, при этом штифт приводится в действие для регулировки углового положения иглы относительно корпуса.
Вариант 40 осуществления изобретения. Устройство введения по любому из вариантов 37-39, в котором корпус содержит направляющий паз, а регулировочный элемент - штифт, проходящий в радиальном направлении от узла иглы через направляющий паз.
Вариант 41 осуществления изобретения. Устройство введения по любому из вариантов 37-40, в котором корпус содержит направляющий паз, имеющий кольцевую часть, а регулировочный элемент содержит штифт, проходящий в радиальном направлении от узла иглы через направляющий паз, при этом штифт выполнен с возможностью перемещения в пределах кольцевой части для регулировки углового положения иглы.
Вариант 42 осуществления изобретения. Устройство введения по любому из вариантов 37-41, в котором корпус содержит направляющий паз, имеющий кольцевую часть и по меньшей мере одну продольную часть, а регулировочный элемент содержит штифт, проходящий в радиальном направлении от узла иглы через направляющий паз, при этом штифт выполнен с возможностью перемещения в пределах кольцевой части для регулирования углового положения иглы и в пределах по меньшей мере одной продольной части при движении иглы вдоль оси.
Вариант 43 осуществления изобретения. Устройство введения по любому из вариантов 37-42, в котором корпус содержит направляющий паз, имеющий кольцевую часть и по меньшей мере три продольные части, а регулировочный элемент содержит штифт, проходящий в радиальном направлении от узла иглы через направляющий паз, при этом штифт выполнен с возможностью перемещения в пределах кольцевой части для регулирования углового положения иглы и с возможностью перемещения в пределах одной из по меньшей мере трех продольных частей при движении иглы вдоль оси.
Вариант 44 осуществления изобретения. Устройство введения по любому из вариантов 37-43, дополнительно содержащее любую из конструктивных особенностей, перечисленных в вариантах 1-35.
Вариант 45 осуществления изобретения. Компонент привода для приведения в действие устройства введения для лечения глаукомы содержит цилиндрический корпус, имеющий первую, вторую и третью удлиненные направляющие, проходящие вдоль корпуса, при этом первая удлиненная направляющая проходит по винтовой спирали от проксимальной части корпуса по направлению к дистальной его части, вторая удлиненная направляющая содержит первую часть, проходящую по винтовой спирали вокруг корпуса, и вторую часть, проходящую по окружности вокруг корпуса, а третья удлиненная направляющая содержит первую часть, проходящую по окружности вокруг корпуса, и вторую часть, проходящую по винтовой спирали вокруг корпуса.
Вариант 46 осуществления изобретения. Компонент по варианту 45, в котором каждая из направляющих содержит паз.
Вариант 47 осуществления изобретения. Компонент по любому из вариантов 45-46, в котором вторая часть второй удлиненной направляющей проходит в плоскости, по существу перпендикулярной продольной оси корпуса.
Вариант 48 осуществления изобретения. Компонент по любому из вариантов 45-47, в котором первая часть первой удлиненной направляющей проходит в плоскости, по существу перпендикулярной продольной оси корпуса.
Вариант 49 осуществления изобретения. Компонент по любому из вариантов 45-48, в котором первая часть второй удлиненной направляющей проходит по винтовой спирали от второй части второй удлиненной направляющей в направлении к проксимальной части корпуса.
Вариант 50 осуществления изобретения. Компонент по любому из вариантов 45-49, в котором вторая часть третьей удлиненной направляющей проходит по винтовой спирали от первой части третьей удлиненной направляющей в направлении к проксимальной части корпуса.
Вариант 51 осуществления изобретения. Компонент по любому из вариантов 45-50, в котором корпус содержит внутреннюю полость, а вторая и третья направляющие проходят вдоль внутренней поверхности внутренней полости.
Вариант 52 осуществления изобретения. Компонент по любому из вариантов 45-51, в котором корпус содержит внутреннюю полость, а вторая и третья направляющие имеют прорези, проходящие от внутренней поверхности внутренней полости к наружной поверхности корпуса.
Вариант 53 осуществления изобретения. Компонент по любому из вариантов 45-52, в котором корпус содержит две соединенный между собой части.
Вариант 54 осуществления изобретения. Компонент по любому из вариантов 45-53, в котором корпус содержит две соединенные между собой части, при этом по меньшей мере одна из направляющих: первая, вторая или третья проходит вдоль обеих частей.
Вариант 55 осуществления изобретения. Компонент по любому из вариантов 45-54, в котором корпус содержит две соединенные между собой части, при этом первая направляющая проходит по винтовой спирали вдоль обеих частей.
Вариант 56 осуществления изобретения. Компонент по любому из вариантов 45-55, в котором корпус содержит две соединенные между собой части, при этом вторая направляющая проходит по винтовой спирали вдоль обеих частей.
Вариант 57 осуществления изобретения. Компонент по любому из вариантов 45-56, в котором корпус содержит две соединенные между собой части, при этом третья направляющая проходит по винтовой спирали вдоль обеих частей.
Вариант 58 осуществления изобретения. Компонент по любому из вариантов 45-57, в котором первая направляющая проходит вдоль корпуса по винтовой спирали, совершая по существу пол-оборота.
Вариант 59 осуществления изобретения. Компонент по любому из вариантов 45-58, в котором вторая направляющая проходит вдоль корпуса по винтовой спирали, совершая по существу пол-оборота.
Вариант 60 осуществления изобретения. Компонент по любому из вариантов 45-59, в котором третья направляющая проходит вдоль корпуса по винтовой спирали, совершая по существу пол-оборота.
Вариант 61 осуществления изобретения. Компонент по любому из вариантов 45-60, в котором корпус является полым.
Вариант 62 осуществления изобретения. Компонент привода по вариантам 45-61, используемый в устройстве введения, который имеет корпус, иглу, плунжер и скользящий элемент, соединенный с корпусом с возможностью скольжения вдоль него, при этом скользящий компонент находится в зацеплении с компонентом привода таким образом, что перемещение скользящего компонента вдоль продольной оси устройства введения вращает компонент привода внутри корпуса для перемещения иглы и/или плунжера вдоль оси.
Вариант 63 осуществления изобретения. Способ изготовления компонента привода по варианту 45, содержащего корпус, имеющий первую, вторую и третью направляющие и включающий в себя две соединенные между собой части, причем первая направляющая проходит по винтовой спирали вдоль обеих частей, при этом способ включает формирование одной части корпуса с первой частью первой направляющей и второй части корпуса со второй частью первой направляющей, так что после соединения первой и второй частей друг с другом первая и вторая части первой направляющей при совмещении образуют первую направляющую.
Вариант 64 осуществления изобретения. Способ по варианту 63, дополнительно включающий формирование на корпусе любой из конструктивных особенностей, перечисленных в любом из вариантов 45-60.
Вариант 65 осуществления изобретения. Устройство фиксации шунта, содержащее удлиненный трубчатый корпус, имеющий первую и вторую части, при этом первая часть является конусообразной, так что она может быть введена в просвет иглы для обеспечения точной тугой посадки в просвете иглы, а вторая часть является захватываемой хирургом для облегчения введения или выведения первой части относительно просвета иглы.
Вариант 66 осуществления изобретения. Устройство по варианту 65, в котором вторая часть содержит бульбообразный конец.
Вариант 67 осуществления изобретения. Устройство по любому из вариантов 65 или 66, в котором корпус выполнен стальным.
Вариант 68 осуществления изобретения. Устройство введения для лечения глаукомы, содержащее корпус, имеющий дистальный часть, наружную поверхность, и удлиненный паз, проходящий вдоль наружной поверхности; иглу, имеющую просвет, соединенную с дистальной частью корпуса; плунжер, расположенный внутри просвета с возможностью перемещения для приложения осевого усилия к шунту, чтобы толкать его в дистальном направлении относительно иглы; скользящий элемент, соединенный с корпусом с возможностью скольжения вдоль удлиненного паза, при этом скользящий компонент выполнен с возможностью приложения осевого усилия к плунжеру и/или игле; и захватный участок, расположенный проксимально по отношению к скользящему элементу, при этом захватный участок содержит первую и вторую части, причем первая часть проходит в радиальном направлении наружу для противодействия дистальному движению руки хирурга относительно корпуса, а вторая часть проходит в радиальном направлении наружу для противодействия проксимальному движению руки хирурга относительно корпуса.
Вариант 69 осуществления изобретения. Устройство введения по варианту 68, в котором захватный участок имеет форму седла, а первая и вторая его части проходят по противоположным сторонам седла.
Вариант 70 осуществления изобретения. Устройство введения по любому из вариантов 68 или 69, в котором захватный участок проходит по окружности вокруг корпуса.
Вариант 71 осуществления изобретения. Устройство введения по любому из вариантов 68-70, в котором захватный участок содержит углубленную часть, расположенную между первой и второй частями, при этом углубленная часть определяет внутренний диаметр, а первая и вторая части определяют максимальный наружный диаметр, причем максимальный наружный диаметр составляет от около 1,5 до около 5 внутренних диаметров.
Вариант 72 осуществления изобретения. Устройство введения по любому из вариантов 68-71, в котором захватный участок содержит углубленную часть, расположенную между первой и второй частями, при этом углубленная часть определяет внутренний диаметр, а первая и вторая части определяют максимальный наружный диаметр, причем максимальный наружный диаметр составляет от около 2 до около 4 внутренних диаметров.
Вариант 73 осуществления изобретения. Устройство введения по любому из вариантов 68-72, в котором участок захвата содержит углубленную часть, расположенную между первой и второй частями, при этом углубленная часть определяет внутренний диаметр, а первая и вторая части определяют максимальный наружный диаметр, причем максимальный наружный диаметр составляет от около 2,5 до около 3 внутренних диаметров.
Вариант 74 осуществления изобретения. Устройство введения по любому из вариантов 68-73, в котором захватный участок содержит углубленную часть, расположенную между первой и второй частями, при этом углубленная часть определяет внутренний диаметр, первая часть определяет первый наружный диаметр, а вторая часть определяет второй наружный диаметр, причем первый и второй наружные диаметры больше внутреннего диаметра, а первый наружный диаметр меньше второго наружного диаметра.
Вариант 75 осуществления изобретения. Устройство введения по любому из вариантов 1-44, дополнительно содержащее захватный участок, расположенный проксимально по отношению к скользящему элементу и имеющий первую и вторую части, при этом первая часть проходит в радиальном направлении наружу для противодействия дистальному движению руки хирурга относительно корпуса при управлении устройством, а вторая часть проходит в радиальном направлении наружу для противодействия проксимальному движению руки хирурга относительно корпуса при управлении устройством.
Вариант 76 осуществления изобретения. Устройство введения по вариантам 1-44 или 75, в котором захватный участок имеет форму седла.
Вариант 77 осуществления изобретения. Устройство введения по любому из вариантов 1-43 или 73-75, в котором захватный участок проходит по окружности вокруг корпуса.
Вариант 78 осуществления изобретения. Устройство введения по любому из вариантов 1-43 или 73-75, в котором захватный участок имеет углубленную часть, расположенную между первой и второй частями, при этом углубленная часть определяет внутренний диаметр, а первая и вторая части определяют максимальный наружный диаметр, при этом максимальный наружный диаметр составляет от около 1,5 до около 5 внутренних диаметров.
Вариант 79 осуществления изобретения. Устройство введения по любому из вариантов 1-43 или 73-75, в котором захватный участок имеет углубленную часть, расположенную между первой и второй частями, при этом углубленная часть определяет внутренний диаметр, а первая и вторая части определяют максимальный наружный диаметр, причем максимальный наружный диаметр составляет от около 2 до около 4 внутренних диаметров.
Вариант 80 осуществления изобретения. Устройство введения по любому из вариантов 1-43 или 73-75, в котором захватный участок имеет углубленную часть, расположенную между первой и второй частями, при этом углубленная часть определяет внутренний диаметр, а первая и вторая части определяют максимальный наружный диаметр, причем максимальный наружный диаметр составляет от около 2,5 до около 3 внутренних диаметров.
Вариант 81 осуществления изобретения. Устройство введения по любому из вариантов 1-43 или 73-80, в котором захватный участок имеет углубленную часть, расположенную между первой и второй частями, при этом углубленная часть определяет внутренний диаметр, первая часть определяет первый наружный диаметр, а вторая часть определяет второй наружный диаметр, причем первый и второй наружные диаметры больше внутреннего диаметра, а первый наружный диаметр меньше второго наружного диаметра.
Вариант 82 осуществления изобретения. Устройство введения, содержащее любую из конструктивных особенностей, перечисленных в вариантах 1-43.
Вариант 83 осуществления изобретения. Способ лечения глаза, включающий введение иглы в глазное яблоко через роговицу глаза; продвижение среза иглы в местоположение между поверхностным слоем и глубоким слоем; и вращение среза иглы для образования пространства между поверхностным слоем и глубоким слоем.
Вариант 84 осуществления изобретения. Способ по варианту 83, в котором продвижение среза иглы осуществляют таким образом, чтобы плоскость среза являлась по существу параллельной поверхности поверхностного слоя.
Вариант 85 осуществления изобретения. Способ по любому из вариантов 83-84, в котором вращение среза иглы включает в себя поворот среза иглы из первой конфигурации, в которой срез иглы по существу лежит в одной плоскости с поверхностью раздела поверхностного слоя и глубокого слоя, во вторую конфигурацию, в которой срез иглы проходит в поперечном направлении по отношению к поверхности раздела.
Вариант 86 осуществления изобретения. Способ по варианту 85, в котором во второй конфигурации срез иглы проходит по существу перпендикулярно к поверхности раздела.
Вариант 87 осуществления изобретения. Способ по любому из вариантов 83-86, в котором продвижение среза иглы включает в себя его прохождение через склеру до момента выхода из склеры.
Вариант 88 осуществления изобретения. Способ по любому из вариантов 83-87, в котором поверхностный слой содержит конъюнктиву.
Вариант 89 осуществления изобретения. Способ по любому из вариантов 83-88, в котором поверхностный слой содержит эписклеральный слой.
Вариант 90 осуществления изобретения. Способ по любому из вариантов 83-89, в котором глубокий слой содержит склеру.
Вариант 91 осуществления изобретения. Способ по любому из вариантов 83-90, в котором глубокий слой содержит эписклеральный слой.
Вариант 92 осуществления изобретения. Способ по любому из вариантов 83-91, в котором поверхностный и глубокий слои содержат склеру.
Вариант 93 осуществления изобретения. Способ лечения глаза, включающий введение иглы в глазное яблоко через роговицу глаза; продвижение среза иглы в местоположение между поверхностным слоем и глубоким слоем; и введение жидкости из среза иглы для образования пространства между поверхностным слоем и глубоким слоем.
Вариант 94 осуществления изобретения. Способ по варианту 93, в котором продвижение среза иглы осуществляют таким образом, что плоскость среза является по существу параллельной поверхности поверхностного слоя.
Вариант 95 осуществления изобретения. Способ по любому из вариантов 93-94, в котором жидкость содержит сбалансированный солевой раствор.
Вариант 96 осуществления изобретения. Способ по любому из вариантов 93-95, в котором поверхностный слой содержит конъюнктиву.
Вариант 97 осуществления изобретения. Способ по любому из вариантов 93-95, в котором поверхностный слой содержит эписклеральный слой.
Вариант 98 осуществления изобретения. Способ по любому из вариантов 93-97, в котором глубокий слой содержит склеру.
Вариант 99 осуществления изобретения. Способ по любому из вариантов 93-95 или 97, в котором глубокий слой содержит эписклеральный слой.
Вариант 100 осуществления изобретения. Способ по любому из вариантов 93-95, в котором поверхностный и глубокий слои содержат поверхностный и глубокий слои эписклерального слоя.
Дополнительные особенности и преимущества изобретения будут изложены в дальнейшем описании со ссылками на чертежи.
Краткое описание чертежей
На фиг. 1А схематично показана операция имплантации интраокулярного шунта в глазное яблоко с использованием устройства введения согласно изобретению;
на фиг. 1В - устройство введения согласно изобретению, вид в перспективе;
на фиг. 2 - то же, что и на фиг. 1В, но в разобранном состоянии, вид в перспективе;
на фиг. 3 показан узел привода в разобранном состоянии устройства, показанного на фиг. 1В, вид в перспективе;
на фиг. 4А, 4В - компонент привода, показанного на фиг. 3, виды в перспективе;
на фиг. 5А, 5В - привод плунжера узла привода, показанного на фиг. 3, виды в перспективе;
на фиг. 6А, 6В - привод иглы узла привода, показанного на фиг. 3, виды в перспективе;
на фиг. 7 - узел крепления иглы узла привода, показанного на фиг. 3, вид в перспективе;
на фиг. 8А, 8В - поворотный регулировочный элемент узла привода, показанного на фиг. 3, виды в перспективе;
на фиг. 9А - узел крепления втулки узла привода, показанного на фиг. 3, имеющий соединенный с ним прямой игольчатый элемент, вид в перспективе;
на фиг. 9В - узел крепления втулки узла привода, показанного на фиг. 3, имеющий соединенный с ним изогнутый игольчатый элемент, вид в перспективе;
на фиг. 10 - наконечник для использования с устройством введения, вид в перспективе;
на фиг. 11 схематично показана наружная поверхность компонента привода, поясняющая контуры паза;
на фиг. 12А, 12В - скользящий элемент устройства, показанного на фиг. 1В, виды в перспективе;
на фиг. 13А, 13В - корпус устройства введения, показанного на фиг. 1В, виды в перспективе;
на фиг. 14А-14Е - устройство введения, показанное на фиг. 1В, на различных этапах перемещения приводного узла, виды сбоку в разрезе;
на фиг. 15А-15Е - узел привода, показанный на фиг. 3, на различных этапах его перемещения, виды в перспективе;
на фиг. 16А-16Е - этапы перемещения иглы и втулки при перемещении узла, показанного на фиг. 15А-15Е, виды в перспективе;
на фиг. 17 - поворотный регулировочный механизм устройства введения, показанного на фиг. 1В, вид сбоку в разрезе;
на фиг. 18 - поворотный регулировочный механизм, показанный на фиг. 17, вид сверху;
на фиг. 19А-19С - положения иглы при угловой регулировке под действием перемещения поворотного регулировочного механизма;
на фиг. 20 - устройство введения согласно другому варианту осуществления изобретения, вид в перспективе;
на фиг. 21 - узел привода устройства, показанного на фиг. 20, в разобранном состоянии, вид в перспективе;
на фиг. 22 - фрагмент устройства введения, показанного на фиг. 20, вид сбоку в разрезе;
на фиг. 23А, 23В - привод иглы устройства введения, показанного на фиг. 20, виды в перспективе;
на фиг. 24 - устройство введения, согласно другому варианту осуществления изобретения, вид в перспективе;
на фиг. 25 - устройство введения, показанное на фиг. 24, в разобранном состоянии, вид в перспективе;
на фиг. 26А, 26В - устройство введения, показанное на фиг. 24, на различных этапах перемещения узла привода, виды сбоку в разрезе;
на фиг. 27А, 27В - игла, втулка и плунжер устройства введения, показанного на фиг. 24, на различных этапах перемещения соответствующих элементов, показанных на фиг. 26А, 26В, виды в разрезе;
на фиг. 28А-28В - первая и вторая половины корпуса устройства введения, показанного на фиг. 24, виды в перспективе;
на фиг. 29 - устройство введения, показанное на фиг. 24, вид в перспективе в разрезе;
на фиг. 30А, 30В - устройство введения согласно еще одному варианту осуществления изобретения на различных этапах перемещения его рукоятки, виды сверху и в перспективе;
на фиг. 31 - устройство введения с узлом привода по другому варианту его выполнения, вид в перспективе;
на фиг. 32А-32С - приводимые в действие кнопкой пружинные узлы привода для устройства введения, виды сбоку в разрезе;
на фиг. 33 - устройство фиксации имплантата, размещенное в просвете иглы устройства введения, вид сбоку в разрезе;
на фиг. 34А-34С схематично показаны этапы операции по имплантации интраокулярного шунта;
на фиг. 35А-35С - этапы другой операции по имплантации интраокулярного шунта;
на фиг. 36А-36С - этапы еще одной операции по имплантации интраокулярного шунта;
на фиг. 37-39 - этапы подготовительной операции для имплантации интраокулярного шунта.
Осуществление изобретения
В дальнейшем описании многие конкретные детали изложены для того, чтобы обеспечить полное понимание изобретения. Следует понимать, что изобретение может быть осуществлено на практике без некоторых таких конкретных деталей. В других случаях хорошо известные конструкции и технологии подробно не показаны для того, чтобы не затруднять понимание изобретения.
Несмотря на то, что в описании представлены конкретные детали различных вариантов осуществления изобретения, следует понимать, что такое описание носит лишь иллюстративный характер и не должно быть истолковано как ограничение. Кроме того, предполагается, что, хотя конкретные варианты осуществления изобретения могут быть описаны или представлены в контексте операций «ab interno», такие варианты осуществления изобретения могут быть использованы в операциях «ab externo». Более того, различные области применения таких вариантов осуществления изобретения и последующие изменения и дополнения, которые могут быть сделаны специалистам в данной области, также охватываются общими концепциями, представленными в настоящем описании.
Глаукома представляет собой заболевание, при котором повреждается зрительный нерв, что приводит к прогрессирующей необратимой потере зрения. Как правило, это связано с повышенным давлением жидкости (т.е. внутриглазной жидкости) в глазном яблоке. При отсутствии лечения глаукома приводит к необратимому повреждению зрительного нерва и, как следствие, к потере поля зрения, которая может прогрессировать до слепоты. Такое нарушенное поле зрения после потери не может быть восстановлено.
При глаукоме давление внутриглазной жидкости в глазном яблоке (передней камере) увеличивается, что может привести к повреждению сосудистой системы в заднем отделе глазного яблока и, в частности, зрительного нерва. Лечение глаукомы и других заболеваний, которые приводят к повышенному давлению в передней камере, предполагает снижение этого давления до нормального уровня.
Как правило, для лечения глаукомы осуществляют хирургическое вмешательство для отвода избыточной жидкости. Операция включает в себя размещение шунта в глазном яблоке для уменьшения внутриглазного давления посредством создания пути для выпуска внутриглазной жидкости из передней камеры глазного яблока. Обычно шунт располагают в глазном яблоке так, что он создает дренажный канал между передней камерой глазного яблока и областью более низкого давления. Различные структуры и/или области глаза, имеющие более низкое давление для дренажа внутриглазной жидкости включают в себя канал Шлемма, субконъюнктивальное пространство, эписклеральные вены, супрахориоидальное пространство, или субарахноидальное пространство. Способы имплантации интраокулярных шунтов известны. Шунты могут быть имплантированы с использованием доступа «ab externo» (введение через конъюнктиву и внутрь через склеру) или доступа «ab interno» (введение через роговицу, через переднюю камеру, через трабекулярную сеть и склеру).
Далее описаны варианты осуществления изобретения со ссылками на чертежи для пояснения изобретения, однако варианты его осуществления могут быть различными. Дополнительно к описанным различным конструктивным особенностям и вариантам выполнения различных элементов могут быть представлены различные способы их функционирования. Такие способы проиллюстрированы несколькими из представленных фигур.
Изобретение относится к нескольким изобретениям и вариантам выполнения устройства введения интраокулярного шунта, используемого в хирургии глаза. Некоторые варианты выполнения устройства могут быть предназначены для использования с имплантатом AqueSys XEN™. Устройство введения может быть изготовлено из отлитого под давлением пластика для снижения стоимости устройства одноразового использования. Шунт может быть предварительно загружен в устройство введения.
Конструкции устройства введения для работы одной рукой
Устройство введения может выполнено для работы одной рукой, чтобы позволить хирургу другой рукой держать фиксирующее приспособление, удерживающее глазное яблоко, например, крючок. Это может улучшить хирургический контроль и точность размещения, а также облегчает проведение операции. На фиг. 1А показана операция лечения глаза 12, при которой используют крючок 14 для удерживания глаза 12 и устройство 100 для введения интраокулярного шунта в глазное яблоко.
На фиг. 1B-19С показаны дополнительные элементы устройства 100 введения, показанного на фиг. 1А. Устройство 100 введения может быть приведено в действие одной рукой, облегчая использование этого устройства хирургом. Устройство 100 может содержать корпус 102, иглу 104, и скользящий элемент 106. Как показано на фиг. 1В, устройство 100 может быть выполнено так, что скользящий элемент 106 соединяется с корпусом 102 с возможностью скольжения вдоль удлиненного паза 110, выполненного в этом корпусе 102. Скользящий элемент 106 может быть выполнен с возможностью перемещения по выбору хирурга для активации перемещения элементов узла 104 иглы.
Например, когда скользящий элемент 106 перемещается от центра корпуса вдоль паза 110 (т.е. к узлу 104 иглы), он может обеспечивать продвижение шунта (не показан) внутри узла 104 иглы, а в некоторых вариантах выполнения и к освобождению от этого узла 104 и иглы. В некоторых вариантах перемещение скользящего элемента 106 может приводить к перемещению элементов узла 104 иглы. Скользящее перемещение скользящего элемента 106 может быть преобразовано в поворотное перемещение, которое может быть преобразовано в перемещение вдоль продольной оси устройства 100 введения. Одним из уникальных преимуществ этого нового и сложного механизма преобразования перемещения является то, что он позволяет обеспечить точное, рассчитанное перемещение элементов устройства внутри компактного узла.
Как показано на фиг. 2, узел 104 иглы может содержать иглу 120, плунжер 122 и втулку 124. Игла 120 может представлять собой иголку калибром 25 или 27. Плунжер 122 может быть выполнен с возможностью скольжения внутри просвета иглы 120 вдоль продольной оси 178 устройства 100 введения. Кроме того, игла 120 может быть выполнена с возможностью скольжения в полости втулки 124 вдоль указанной продольной оси 178. Как игла 120, так и плунжер 122 могут быть соединены с соответствующими компонентами узла привода 130, расположенного внутри корпуса 102. В собранном состоянии устройство 100 введения может быть выполнено так, что игла 120, плунжер 122 и втулка 124 располагаются вдоль одной оси или коаксиально с продольной осью 178. Некоторые узлы привода для приведения в действие плунжера и извлечения иглы в устройстве введения описаны в заявках US 13/336803, US 12/946645, US 12/620564, US 12/946653, US 12/946565, и US 11/771805.
Как показано на фиг. 2 и 3, игла 120, плунжер 122 и втулка 124 могут быть функционально соединены с узлом 130 привода и/или корпусом 102. Например, игла 120 может быть соединена с узлом 140 крепления иглы. Узел 140 крепления иглы, показанный на фиг. 2, 3 и 7, может быть неподвижно соединен с проксимальным концом иглы 120 так, что поворотное и продольное перемещение иглы 120 относительно узла 140 крепления иглы ограничивается или предотвращается. При сборке устройства 100 узел 140 крепления иглы может быть размещен в дистальном конце корпуса 102. Кроме того, как показано на фиг. 3 и описано ниже, узел 140 крепления иглы может быть соединен с приводом 164 иглы (в показанном варианте выполнения - с использованием поворотного регулировочного элемента 370) узла 130 привода.
Как показано на фиг. 3, плунжер 122 может быть соединен с узлом 142 его крепления. Узел крепления 142 плунжера, показанный на фиг. 3, 5А и 5В, может быть неподвижно соединен с проксимальным концом или средней частью плунжера 122 для ограничения или предотвращения его вращательного и продольного перемещения относительно этого узла 142 крепления. Как показано на фиг. 3 и описано далее, узел крепления 142 плунжера может быть соединен с приводом 162 плунжера узла 130 привода.
Кроме того, втулка 124 может быть соединена с узлом 144 ее крепления. Этот узел 144, показанный на фиг. 2, 3 и 9, может быть соединен с проксимальным концом втулки 124 так, чтобы предотвратить вращательное и продольное перемещение этой втулки 124 относительно узла 144 ее крепления. Узел 144 крепления втулки может быть соединен с частью 148 корпуса 102, как будет описано далее.
Игла 120, плунжер 122 и втулка 124 могут быть функционально связаны с узлом 130 привода и/или корпусом 102. Такое соединение может осуществляться посредством узла 140 крепления иглы, узла 142 крепления плунжера и узла 144 крепления втулки. Однако узел 140 крепления иглы, узел 142 крепления плунжера и узел 144 крепления втулки могут быть соединены с одним или несколькими приводными элементами, которые соединяют узел 130 привода с корпусом 102.
Согласно некоторым вариантам выполнения узел 130 привода может быть соединен с иглой 120 и плунжером 122 для обеспечения их перемещения относительно корпуса 102 вдоль продольной оси 178. Например, узел 130 привода может быть выполнен с возможностью поворота или скольжения внутри корпуса 102. Узел 130 привода может передавать продольное или осевое усилие вдоль продольной оси 178 на иглу 120 и/или плунжер 122 по отдельности или одновременно для обеспечения их перемещения относительно корпуса 102 вдоль продольной оси 178.
Перемещение скользящего элемента 106 может вызывать перемещение узла 130 привода и посредством этого обеспечивать перемещение элементов узла 130 привода относительно корпуса 102. Согласно изобретению скользящий элемент 106 может быть выполнен с возможностью перемещения в продольном направлении или с возможностью скольжения вдоль продольной оси 178 относительно корпуса 102 для приведения в движение или обеспечения линейного перемещения иглы 120 и плунжера 122.
Как показано на фиг. 2-6В, узел 130 привода может содержать компонент 160 привода, привод 162 плунжера и привод 164 иглы. Продольное или линейное перемещение скользящего элемента 106 вдоль продольной оси 178 может быть преобразовано так, что оно обеспечивает поворот компонента 160 привода узла 130 привода, при этом указанный поворот может быть преобразован для обеспечения продольного или линейного перемещения иглы 120 и плунжера 122 вдоль продольной оси 178 относительно корпуса 102. Перемещение элементов вдоль продольной оси 178 может быть параллельным относительно продольной оси 178. На фиг. 14А-16Е показано взаимодействие между элементами узла 104 иглы и узла 130 привода в соответствие с изобретением.
На фиг. 2 и 9А-9В показаны конструкции, посредством которых узел 144 крепления втулки может быть соединен с корпусом 102. Например, узел 144 крепления втулки может включать в себя выступ или паз 146, которые могут совпадать с соответствующим выступом или пазом 148 на одной или нескольких частях корпуса 102. Когда корпус 102 собран, выступ 148 может быть размещен в пазу 146, обеспечивая фиксацию узла 144 крепления втулки в корпусе 102. В некоторых вариантах выполнения, когда устройство 100 собрано, игла 120 и плунжер 122 подвижны относительно друг друга, корпуса 102 и втулки 124.
Как показано на фиг. 9А, узел 144 крепления втулки соединен с прямой втулкой 124. На фиг. 9В показана втулка 124, имеющая небольшую кривизну или изгиб 290. Изгиб 290 может располагаться около узла 144 крепления втулки и образовывать относительно продольной оси 178 угол 292 отклонения в диапазоне от 5° до 30°, от 8° до 15°, от 9° до 13° или 10°.
Изгиб втулки 124 может улучшить доступ к участкам глазного яблока, например, из положения, в котором это устройство располагается над скуловой костью.
Кроме того, дистальный конец 294 втулки 124 может быть по существу прямым, а проксимальный конец 296 втулки 124 может быть искривленным или изогнутым. Проксимальный конец 296 может составлять от четверти до половины всей длины втулки 124. В некоторых случаях длина проксимального конца 296 может составлять треть всей длины втулки 124. Соответственно, дистальный конец 294 может составлять от половины до трех четвертей всей длины втулки 124, а в некоторых случаях - около двух третьих всей длины втулки 124. Кроме того, предпочтительно дистальный конец 294 может иметь достаточную длину, чтобы вся втулка 124, вводимая в глазное яблоко, была по существу прямой.
В то время как втулка 124 может иметь жесткую конструкцию, выдерживающую стандартные напряжения изгиба во время выполнения операций, раскрытых в настоящем описании, игла 120 может быть выполнена из гибкого стержня, способного отклоняться во время проксимального выведения иглы 120 во втулку 124.
Таким образом, проксимальная часть иглы 120, проходящая вдоль изгиба 290 втулки 124, может быть выведена во втулку 124 ближе к узлу 144 крепления втулки или вблизи него. После этого перемещения, несмотря на то, что проксимальная часть иглы 120 изогнута, она может изгибаться и выпрямляться, когда иглу 120 вытягивают в проксимальном направлении в прямую часть втулки 124 или других компонентов внутри устройства введения. Кроме того, участки иглы 120, расположенные в дистальном конце втулки 124 (находящейся в прямой конфигурации) могут сгибаться или изгибаться, когда игла 120 отводится в направлении проксимального конца корпуса назад через изгиб 290 этой втулки 124.
При использовании дугообразной или изогнутой втулки 124 в сочетании с гибкой или подходящей по форме иглой 120 может быть улучшен доступ к областям глазного яблока.
Некоторые варианты выполнения могут повторять конструкции трубки и способов применения, раскрытые в заявке US 2012/0123434.
Используемый в настоящем описании термин «паз» или «пазы» обозначает элемент конструкции, который может быть реализован в различных вариантах. Понятие «паз» или «пазы» подразумевает и (и наоборот) другие элементы конструкции, направляющие перемещение или принимающие соответствующий выступ, такие как направляющая, пространство между зубьями, углубление, вырез, выемка, отверстие, канал, проход, паз, или прорезь, и т.д., проходящие по меньшей мере частично в детали или через нее. Кроме того, понятие «выступ» или «выступы» подразумевает и (и наоборот) другие элементы конструкции, такие как гребень, выпуклость, зуб, бугор и т.д. Элементы конструкции, такие как пазы и выступы могут быть взаимозаменяемыми. Несмотря на то, что в описании указано лишь несколько примеров конструкций выступ/паз, возможны различные комбинации таких элементов конструкции.
На фиг. 3 показан узел 130 привода в разобранном состоянии. Компонент 160 привода показан в виде конструкции из двух частей, которая в собранном состоянии, по меньшей мере частично, вмещает одну или несколько частей других элементов узла 130 привода (показано на фиг. 2). Две части компонента 160 привода могут быть соединены между собой посредством ряда взаимодействующих выступов и выемок, облегчая тем самым механическое и/или клеевое соединение частей для формирования составного компонента.
Компонент 160 привода может содержать один или несколько пазов и/или один или несколько выступов для облегчения зацепления и перемещения других элементов узла 130 привода. Компонент 160 привода может содержать ряд пазов, входящих в зацепление с соответствующими выступами или пазами на других элементах узла 130 привода для упрощения преобразования одного вида перемещения в другое. Действие и перемещение компонентов узла 130 привода в проиллюстрированном варианте осуществления изобретения представляют собой лишь один из множества вариантов осуществления изобретения.
В варианте, показанном на фиг. 3, скользящий элемент 106, привод 162 плунжера и привод 164 иглы могут содержать радиальный выступ, входящий в паз компонента 160 привода для передачи осевого или продольного усилия между элементами и приводами для приведения в действие устройства введения 100. Компонент 160 привода может содержать один или несколько пазов канавок для соединения со скользящим элементом 106, приводом 162 плунжера, и приводом 164 иглы.
На фиг. 3-4В показан вариант выполнения компонента 160 привода. Как показано на фиг. 4А-4В, компонент 160 привода может содержать паз 170 для зацепления с соответствующим выступом скользящего элемента 106. Кроме того, компонент 160 привода также может содержать первую и вторую ведущие пазы 172, 174 для соединения с возможностью скольжения с соответствующими выступами привода 162 плунжера и привода 164 иглы. Скользящий элемент 106 может содержать выступ 180 (фиг. 12В), привод 162 плунжера может включать в себя выступ 182 (фиг. 5А-5В), а привод иглы 164 может содержать выступ 184 (фиг. 6А-6В). Такое расположение пазов и выступов может упростить передачу перемещения скользящего элемента 106 к одному из соответствующих элементов: игле 120 и плунжеру 122.
В некоторых варианты выполнения выступы и пазы меняться местами, в результате чего один или несколько таких элементов, как скользящий элемент 106, привод 162 плунжера или привод 164 иглы содержат паз, в котором может размещаться выступ компонента 160 привода. В таких вариантах выполнения к компоненту 160 привода может быть присоединен или прикреплен внутренний выступ с возможностью скольжения в пазах компонента 160 привода, что обеспечивает поворот компонента 160 привода и продольное перемещение привода 162 плунжера и привода 164 иглы. В других вариантах выполнения компонент 160 привода может содержать выступающий в радиальном направлении гребень, вдоль которого может скользить привод 162 плунжера или привод 164 иглы (например, посредством зацепления гребня и паза, позволяя гребню компонента 160 привода скользить в пазу привода 162 плунжера или привода 164 иглы). Такие выступы на компоненте 160 привода могут отходить в радиальном направлении внутрь (к продольной оси 178) или радиально наружу (от продольной оси 178) от поверхности этого компонента 160. Возможны различные конфигурации взаимодействующих конструкций скользящего элемента 106, привода 162 плунжера, привода 164 иглы и компонента 160 привода устройства 100 введения.
Несмотря на то, что компонент 160 привода может поворачиваться относительно корпуса 102, поворотное (относительно продольной оси 178) относительно корпуса 102 скользящего элемента 106, привода 162 плунжера и привода 164 иглы может быть ограничен. Поворот скользящего элемента 106, привода 162 плунжера, и/или привода 164 иглы относительно корпуса 102 может быть ограничен за счет непосредственного или опосредованного зацепления с корпусом 102. Скользящий элемент 106 может скользить вдоль паза 110 корпуса 102 и входить в зацепление с ним посредством выступа 180. Это зацепление может обеспечить продольное перемещение скользящего элемента 106 при ограничении его поворота относительно корпуса 102. Привод 162 плунжера и/или привод 164 иглы (которые могут быть расположены радиально внутри компонента 160 привода) может содержать одну или несколько направляющих поверхностей или конструкций определенной формы, которые входят в зацепление с соответствующей внутренней направляющей поверхностью или конструкцией корпуса 102, ограничивая поворот привода 162 плунжера и/или привода 164 иглы относительно корпуса 102.
Привод 162 плунжера и привод 164 иглы могут содержать продолговатые корпуса, имеющие часть с по существу прямоугольной формой поперечного сечения. Как показано на фиг. 5А-6В, привод 162 плунжера и привод 164 иглы могут иметь соответствующие профили в поперечном сечении, которые позволяют их скомпоновать вместе, обеспечивая возможность скольжения привода 162 плунжера и привода 164 иглы вдоль продольной оси 178 относительно друг друга при ограничении поворота привода 162 плунжера относительно привода 164 иглы вокруг продольной оси 178.
Как показано на фиг. 5А-5В, привод плунжера может содержать продолговатое основание 190. Продолговатое основание 190 может иметь по существу прямоугольный профиль в поперечном сечении. Продолговатое основание 190 может быть соединено с направляющей 192. Привод 162 плунжера может содержать направляющую 192, соединенную с проксимальным концом 194 продолговатого основания. Направляющая 192 может содержать выступ 182. Кроме того, направляющая 192 может содержать наружную или внешнюю направляющую поверхность 196, выполненную с возможностью прилегания или соответствия с внутренней или находящейся внутри направляющей поверхностью компонента 160 привода. Например, это может быть наружная поверхность 196, которая показана на фиг. 3. Направляющая поверхность 196 может быть выполнена с возможностью прилегания к соответствующей направляющей поверхности 198 компонента 160 привода.
Как показано на фиг. 6А-6В привод иглы может содержать продолговатое основание 200, имеющее проксимальный конец 202 и дистальный конец 204, при этом привод 164 иглы может содержать направляющую 210, соединенную с проксимальным концом 202. Направляющая 210 может содержать выступ 184. Направляющая 210 может содержать по меньшей мере одну соединительную конструкцию или направляющую поверхность 212. Как показано, соединительная конструкция 212 может содержать полость, имеющую по существу прямоугольный профиль в поперечном сечении. Профиль в поперечном сечении соединительной конструкции 212 может соответствовать наружному профилю в поперечном сечении продолговатого основания 190 привода плунжера 162.
Как показано на фиг. 3, при сборке продолговатое основание 190 привода 162 плунжера может входить со скольжением в полость соединительной конструкции 212 привода 164 иглы. Скользящее зацепление между продолговатым основанием 190 и соединительной конструкцией 212 может обеспечить продольное перемещение привода 162 плунжера относительно привода 164 иглы, при этом плотное прилегание прямоугольных профилей в поперечном сечении продолговатого основания 190 и соединительной конструкции 212 по существу ограничивает поворот привода 162 плунжера относительно привода 164 иглы.
Кроме того, поворот привода 162 плунжера и привода 164 иглы относительно корпуса 102 может быть ограничен посредством зацепления профилей поперечного сечения привода 162 плунжера, либо привода 164 иглы, или их обоих, с/между соответствующей соединительной конструкцией или направляющей поверхностью внутри полости 228 корпуса 102. Согласно изобретению поворот привода 162 плунжера и привода 164 иглы относительно корпуса 102 может быть ограничен.
В некоторых вариантах выполнения для ограничения поворота привода 162 плунжера и привода 164 иглы относительно корпуса 102, выступ 182 указанного привода 162 и выступ 184 указанного привода 164 могут проходить через компонент 160 привода и входить в зацепление с соответствующим пазом 220 корпуса 102 (фиг. 13В). Поскольку выступы 182, 184 проходят через компонент 160 привода в пазу 220 корпуса 102, они могут входить в зацепление с этим корпусом 102 для ограничения или регулировки поворота привода 162 плунжера и привода 164 иглы относительно этого корпуса 102. Выступы 182, 184 могут перемещаться по заданной траектории, например, прямолинейной или криволинейной, определенной пазом 220, выполненным в корпусе 102. В представленных вариантах выполнения изобретения паз 220 корпуса 102 может использоваться как для привода 162 плунжера, так и для привода 164 иглы. Кроме того, прорезь 220 может определить путь, который является, по существу, параллельным продольной оси 178 корпуса 102.
Скользящий элемент 106 может быть выполнена так, что его выступ 180 проходит через корпус 102 в паз 170 компонента 160 привода.
Как показано на фиг. 4А-4В, паз 170 для скользящего элемента может проходить по винтовой траектории вокруг компонента 160 привода. На виде сверху винтовая траектория паза 170 для скользящей детали может быть по существу прямолинейной, как показано на фиг. 11 (например, паз 170 для скользящего элемента может иметь по существу постоянный угол наклона). Выступ 180 скользящего элемента 106 может перемещаться или проходить внутри паза 170 из первого положения во второе, третье, четвертое и пятое положения. Поскольку скользящий элемент перемещается в продольном направлении вдоль корпуса 102, указанный выступ 180 перемещается между положениями, показанными на фиг. 11. Такое продольное перемещение выступа 180 вдоль продольной оси 178 может привести к повороту перемещению компонента 160 привода. Поворот компонента 160 привода может привести к продольному перемещению привода 162 плунжера и/или привода 164 иглы вдоль продольной оси 178.
Как показано на фиг. 4А-4В, первый и второй управляющие пазы 172, 174 компонента 160 привода могут быть приспособлены для зацепления с выступами 182, 184. В представленном варианте выполнения первый и второй ведущие пазы 172, 174 могут содержать прямолинейный или прямой участок, через который может проходить выступ, не обеспечивая продольное перемещение соответствующей приводной детали, и наклонный участок, через который может проходить выступ, обеспечивающий продольное перемещение соответствующей приводной детали. Например, первый управляющий паз 172 может содержать прямой участок 230 и наклонный участок 232. Выступ 182 привода 162 плунжера может перемещаться или проходить вдоль различных положений внутри первого управляющего паза 172. Это перемещение может осуществляться посредством передвижения скользящего элемента 106.
На фиг. 11 показаны в развертке траектории первого и второго управляющих пазов 172, 174 и паза 170 для скользящего элемента компонента 160 привода. Выступ 182 может перемещаться из первого положения во второе, третье, четвертое и пятое положения в пределах первого управляющего паза 172. Поскольку первый выступ 182 перемещается из первого положения во второе в пределах наклонного участка первого управляющего паза, такое перемещение обеспечивает перемещение привода плунжера относительно компонента 160 привода вдоль продольной оси 178. Перемещение привода 162 плунжера из первого положения во второе и третье положения показано на фиг. 14А-14С. Когда выступ 182 перемещается по наклонному участку 232 первого паза 172, привод 162 плунжера может выдвигаться в дистальном направлении вдоль продольной оси 178, пока выступ 182 не войдет в прямой участок 230 первого управляющего паза 172. После этого, в третьем, четвертом и пятом положениях выступ 182 будет сохранять по существу постоянное продольное положение вдоль продольной оси 178 относительно компонента 160 привода. Соответственно, привод 162 плунжера не меняет своего продольного положения вдоль продольной оси 178, т.к. компонент привода продолжает поворачиваться, в результате чего выступ 182 перемещается из третьего положения в пятое положение.
Аналогично выступу 182, расположенному внутри первого управляющего паза 172, выступ 184 может проходить внутри второго управляющего паза 174 и перемещаться вдоль траектории, определенной вторым управляющим пазом 174. Второй управляющий паз 174 может содержать прямой участок 240 и наклонный участок 242. Выступ 184 привода 164 иглы может перемещаться из первого положения во второе, третье, четвертое и пятое положения. В первом, втором и третьем положениях выступ 184 будет по существу сохранять свое продольное положение вдоль продольной оси 178 по отношению к компоненту 160 привода. Кроме того, когда выступ 184 выходит из прямого участка 240 второго управляющего паза 174 и входит в наклонный участок 242, продольное положение привода 164 иглы вдоль продольной оси 178 начнет меняться. Таким образом, во время начального перемещения из первого положения в третье, привод иглы 164 будет сохранять свое продольное положение вдоль продольной оси 178 относительно компонента 160 привода. При этом привод 164 иглы будет проксимально отведен назад вдоль продольной оси 178 относительно компонент 160 привода из-за того, что выступ 184 перемещается через наклонный участок 242 второго управляющего паза 174.
Передвижение скользящего элемента 106 и возникшее в результате перемещение элементов узла 130 привода будет описано далее со ссылкой на фиг. 11 и фиг. 14А-16Е. Из положения 1 (на фиг. 11), как показано на фиг. 14А и 15А, скользящий элемент 106 может перемещаться от центра корпуса в положение 2. Перемещение из положения 1 в положение 2 приводит к вращению компонента 160 привода, что обеспечивает продольное перемещение привода 162 плунжера, как показано на фиг. 14В и 15В. Как показано на фиг. 16В, перемещение привода 162 плунжера в направлении от центра корпуса вдоль продольной оси приводит к перемещению шунта 300 так, что он сначала выходит из иглы 120.
При перемещении скользящего элемента 106 в положение 3, привод 162 плунжера продолжает перемещаться в дистальном направлении, в то время как привод 164 иглы сохраняет то же продольное положение вдоль продольной оси относительно компонента 160 привода, как показано на фиг. 14С и 15С. В результате шунт 300 выталкивается из иглы 120, как показано на фиг. 16С или далее.
Дальнейшее дистальное перемещение скользящего элемента 106 вдоль продольной оси обеспечивает перемещение выступа 180 из положения 3 в положение 4. Такой продолжительный поворот компонента 160 привода больше не вызывает дистального продольного перемещения привода 162 плунжера вдоль продольной оси. Вместо этого продолжительный поворот компонента 160 привода приводит к продольному проксимальному перемещению привода 164 иглы назад относительно этого компонента 160 привода вдоль продольной оси. Таким образом, игла втягивается внутрь втулки 124, как показано на фиг. 14D, 15D, и 16D, или 16Е.
После такого продолжительного перемещения скользящего элемента 106 в положение 5 будет происходить проксимальное втягивание привода 164 иглы относительно компонента 160 привода, в то время как привод 162 плунжера сохраняет свое продольное положение относительно компонента 160 привода. Таким образом, игла 120 может быть выведена назад во втулку 124, как показано на фиг. 16D или фиг. 16Е. Шунт 300 может быть оставлен в требуемой или целевой области, в то время как игла и втулка 124 удаляются. Несмотря на то, что игла 120 отведена проксимально назад, как показано на фиг. 16D-16E, плунжер 122 (хотя и не показан на фиг. 16А-16Е) может сохранять свое продольное положение относительно втулки 124, чтобы обеспечить проксимальную остановку и предотвратить проксимальное отведение назад шунта 300 в связи с тем, что игла 120 является проксимально отведенной назад во втулку 124.
На фиг. 16D показано конечное положение иглы 120 относительно втулки 124, а на фиг. 16Е показан вариант выполнения, в котором игла 120 полностью отведена назад в проксимальном направлении во втулку 124. Положение иглы 120, показанное на фиг. 16D, может способствовать защите или предотвращению повреждения тканей глазного яблока или шунта во время его имплантации.
Например, при отведении иглы 120 иглы во втулку 124 хирург может случайно переместить иглу относительно склеры, создавая тем самым боковое или вертикальное напряжение или усилие, которое может согнуть или подвергнуть напряжению иглу 120. Такое боковое или вертикальное усилие может возникнуть в тех случаях, когда хирург пытается расположить устройство введения над лицевыми структурами пациента. Часто, из-за того, что для одного из предпочтительных положений для имплантации в глазное яблоко требуется, чтобы хирург ориентировал и удерживал устройство введения выше скулы, при этом скула пациента и/или ориентирование может затруднить правильное позиционирование устройства введения относительно глазного яблока.
Из-за возможного воздействия усилия хирурга в боковом или вертикальном направлений предпочтительно оставить по меньшей мере участок скоса иглы выдвинутым из дистального конца втулки 124 и вывести сразу полностью устройство введения из глазного яблока в положение, показанное на фиг. 16D. Таким образом, до тех пор, пока проксимальное выведение устройства введения (включая втулку 124) не выполняется для того, чтобы высвободить шунт 300 в глазном яблоке, участок скоса иглы 120 может оставаться выдвинутым и/или соприкасаться с тканями глазного яблока (например, склерой). В результате оставления иглы 120 выдвинутой или в зацеплении с тканями глазного яблока, зацепление иглы 120 с тканями глазного яблока может, как правило, обеспечивать устойчивость к любым боковым или вертикальных усилиям. Таким образом, устройство введения не будет предрасположено к «прыжкам» или подвергаться значительному сдвигу до проксимального выведения втулки 124 из тканей глазного яблока.
Удерживание участка скоса выдвинутым из дистального конца втулки 124 предотвращает повреждения тканей глазного яблока, которое может произойти, если втулка внезапно перемещается в сторону или по вертикали, сохраняя при этом свое продольное положение относительно тканей глазного яблока. В таких ситуациях дальний конец втулки 124 может нанести царапины или иным образом повредить ткани глазного яблока. В некоторых ситуациях повреждение глазного яблока может включать повреждение радужной оболочки глаза, такое как иссечение радужной оболочки.
Из-за того, что шунт 300 может входить, по меньшей мере частично, во втулку 124 после того, как игла 120 полностью выведена в эту втулку 124, боковое или вертикальное усилие, действующее на эту втулку 124, может привести по существу к соприкосновению шунта 300 с полостью втулки 124. Такое соприкосновение может вытащить шунт 300 из тканей глазного яблока или иным образом повредить проксимальный конец или приточный конец шунта 300.
Согласно некоторым вариантам выполнения приблизительно от около четверти и до около полной продольной длины скоса иглы (при измерении вдоль продольной оси) могут быть выдвинуты из дистального конца втулки 124, как показано на фиг. 16D. В некоторых вариантах скос иглы может выступать из дистального конца втулки на расстоянии от около одной четверти продольной длины скоса до около трех четвертей продольной длины скоса. Более того, в некоторых вариантах скос может выступать из втулки 124 на около половину продольной длины скоса. Например, дистальный кончик скоса может проходить или выступать на расстоянии около 1 мм, около 2 мм, или около 3 мм или более из дистального конца втулки 124. С использованием этих принципов могут быть выполнены другие модификации и варианты осуществления изобретения.
В качестве альтернативы варианту, показанному на фиг. 16D, игла 120 может быть полностью отведена назад во втулку 124 до проксимального отведения назад втулки 124 из глазного яблока.
После удерживания иглы 120, по меньшей мере частично выдвинутой или сцепленной с тканями глазного яблока, как показано на фиг. 16D, проксимальное отведение втулки 124 и иглы 120 назад может уменьшить или исключить боковые и/или вертикальные усилия, действующие на шунт 300. Вследствие того, что для выведения устройства из глазного яблока рука хирурга перемещается в проксимальном направлении, устраняется большинство или каждое из боковых или вертикальных усилий натяжения, действующих на устройство введения.
Показанные на фиг. 11 траектории пазов относятся к одному из вариантов перемещения и приведения в действие элементов узла 130 привода, однако для различных типов перемещений этих элементов могут быть использованы и другие траектории.
Например, наклонный участок пазов может иметь криволинейную траекторию, которая увеличивает или уменьшает продольное смещение этого элемента на единицу поворота при вращении компонента 160 привода. Паз 170 для скользящего элемента может быть прямым или иметь криволинейный участок для обеспечения переменного приведения в действие или увеличения/уменьшения скорости вращения на единицу продольного перемещения скользящего элемента 106.
Аналогично, наклонные участки первого и второго управляющих пазов 172, 174 могут иметь криволинейные участки, увеличивающие или уменьшающие продольное смещение на единицу поворота. Первый и второй управляющие пазы 172, 174 могут быть выполнены по существу криволинейными, переходящими из прямого участка в наклонный, или обеспечивающих продольное перемещение соответствующего компонента и поддерживающих продольное положение этого соответствующего компонента. Первый и второй управляющие пазы 172, 174 могут иметь либо более четко определенный переход между участками пазов, вдоль которых перемещение выступов обеспечивает перемещение вдоль оси 178, либо участками пазов, поддерживающих положение вдоль оси 178 соответствующего компонента. В качестве альтернативы, первый и второй управляющие пазы 172, 174 могут иметь траекторию, обеспечивающую постепенный, плавный или менее видимый переход от участка паза, вдоль которого перемещение выступа обеспечивает перемещение элемента вдоль оси 178, к другому участку паза, вдоль которого перемещение выступа обеспечивает удерживание этого элемента в определенном положении вдоль оси 178.
Кроме того, первый и второй управляющие пазы 172, 174 и/или паз 170 для скользящего элемента (один из пазов или любая их комбинация) могут иметь множество секций или участков, образующих другой механизм, обеспечивающий приведение в действие или другую скорость вращения, или продольное перемещение вдоль продольной оси. Соответственно, специалисты в данной области могут реализовать различные варианты выполнения для создания необходимых соединений компонентов описанного выше устройства введения.
Как показано на фиг. 4А-4В, компонент 160 привода может содержать две части: первую часть 252 и вторую часть 254. Конструкция из двух частей может позволить образовать два или более паза при изготовлении литьем под давлением. Таким образом, единая составной компонент 160 привода может быть изготовлен литьем под давлением с одним или несколькими пазами, проходящими частично или полностью вдоль корпуса компонента 160 привода. Это позволит пазам изменять их направление на линии разъема 256 между первой и второй частями 252, 254, так что могут быть образованы сложные направления пазов. Например, учитывая ограничения при литье под давлением, единая литая деталь не обеспечит возможность формирования участков пазов, изменяющих направление, так как компонент не будет извлекаться из пресс-формы. Таким образом, потребуется обработка после формования. В отличие от этого, некоторые варианты выполнения, представленные в настоящем описании, преодолевают эту проблему посредством изготовления компонента из двух частей, изготовленных литьем под давлением.
Как показано на фиг. 10, устройство 100 введения может содержать колпачок 310. Колпачок 310 содержит первый конец 312 и второй конец 314. Первый конец колпачка 312 может быть выполнен открытым и с возможностью зацепления с корпусом 102 для крепления этого колпачка 310 на дальнем конце корпуса 102 для закрытия и защиты втулки 124 и иглы 120.
На фиг. 12А, 12В показан скользящий элемент 106 устройства введения, показанного на фиг. 1В. На фиг. 12А показан скользящий элемент 106 на виде в перспективе сверху. Скользящий элемент 106 может иметь проксимальный конец 316 и дистальный конец 318, которые могут содержать выпуклые контуры или края, выступающие в радиальном направлении от скользящего элемента 106 для обеспечения надежного, эргономичного захвата большим или указательным пальцем хирурга во время использования.
Проксимальный конец 316 может содержать один или несколько радиальных выступов 324, позволяющих легко входить в зацепление с пальцем хирурга для обеспечения вращательного движения или прикладывания крутящего момента к устройству введения для его поворота вокруг продольной оси 178.
Как показано на фиг. 12А, скользящий элемент 106 может содержать один или более промежуточных пазов или выступов 326, при этом один или оба выступа 326 могут отсутствовать в скользящем элементе 106. В некоторых вариантах выполнения отказ от использования выступов 326 может обеспечить возможность пальцу хирурга находиться более глубоко и надежно между проксимальным и дистальным концами 316, 318 скользящего элемента 106. Выступы 326 могут иметь уменьшенный профиль, переменный профиль, или могут быть выполнены в виде рядов случайно или симметрично расположенных выступов, или шиповидных выступов, или шипов.
Как показано на фиг. 12В, выступ 180 может быть выполнен за одно целое со скользящим элементом 106. Однако выступ 180 может быть выполнен и в виде отдельного элемента, прикрепляемого к скользящему элементу 106.
На фиг. 13А, 13В показан один из вариантов выполнения корпуса 102, который содержит первую часть 320 и вторую часть 322, определяющие при соединении друг с другом внутреннюю полость 228. Обычно, показанная на фиг. 2 внутренняя полость 228 может вмещать находящийся в ней узел 130 привода.
Корпус 102 может содержать паз 334, через который может проходить выступ 180 скользящего элемента 106. Таким образом, скользящий элемент 106 может быть соединен с первой частью 320 корпуса 102, а выступ 180 скользящего элемента 106 может проходить через паз 110. При прохождении через паз 110 выступ 180 может входить в зацепление с пазом 170 в компоненте 160 привода.
Вторая часть 322 корпуса 102 может содержать паз 220, как описано выше. Паз 220 может входить в зацепление с выступами 182, 184 привода 162 плунжера и привода 164 иглы 164, соответственно. В собранном виде, как показано на фиг. 1В, скользящий элемент 106, привод 162 плунжера и привод 164 иглы имеют по существу фиксированное угловое положение относительно корпуса 102. Действительно, из-за свободного поворота компонента 160 привода относительно корпуса 102 (в ответ на перемещение скользящего элемента 106) может произойти продольное перемещение привода 162 плунжера и привода 164 иглы вдоль продольной оси.
Как показано на фиг. 13А, 13В, корпус 102 может содержать участок 340 захвата в виде углубления седловидной формы в корпусе 102. Участок 340 захвата может содержать первую и вторую части 342, 344, проходящие радиально наружу от продольной оси корпуса 102. Первая и вторая части 342, 344 могут содержать выступы или проксимальный и дистальный кольцевые выступы, отходящие от наружной поверхности корпуса 102. Первая часть 342 может обеспечить противодействие проксимальному перемещению руки хирурга относительно корпуса 102. Дополнительно, вторая часть 344 может проходить радиально наружу для обеспечения противодействия проксимальному перемещению руки хирурга относительно корпуса 102. Участок 340 захвата может содержать углубление 346, расположенное между первой и второй частями 342, 344. Углубление 346 определяет внутренний диаметр, а первая и вторая части 342, 344 определяют максимальный наружный диаметр. Максимальный наружный диаметр может составлять от 1,5 до 5 внутреннего диаметра, от 2,5 до 4 внутреннего диаметра или от 3 до 4 внутреннего диаметра.
Участок 340 захвата позволяет хирургу прочно удерживать дистальный конец корпуса 102 пальцами или между пальцев, осуществляя при этом приведение в действие или перемещение в продольном направлении скользящего элемента 106 в сторону участка 340 захвата. Таким образом, в таком варианте выполнения обеспечивается возможность приведения в действие устройства 100 введения одной рукой. Эта особенность некоторых вариантов выполнения позволяет хирургу свободно использовать другую руку во время хирургической операции, в то же время полностью управляя устройством 100 введения одной рукой.
Длина или шаг пазов в компоненте 160 привода могут быть изменены для регулирования общего перемещения скользящего элемента, необходимого для приведения в действие устройства введения. Несмотря на то, что большее перемещение может быть предпочтительным для обеспечения более плавного движения элементов устройства введения и управления действующими на них усилиями, различные особенности узла 130 привода могут быть изменены для регулировки исходного положения скользящего элемента относительно участка 340 захвата. Такие модификации или изменения могут быть осуществлены для создания эргономичной конструкции для конкретного хирурга. Другие конструктивные особенности и модификации могут быть выполнены для дальнейшей персонализации эргономики или работы устройства введения.
Регулирование поворота скоса иглы
Согласно вариантам выполнения, показанным на фиг. 17-19С изобретение может обеспечивать управление поворотом иглы. Как показано на фиг. 1В, устройство введения содержит узел 104 иглы. Узел 104 иглы может быть выполнен с возможностью управления угловым положением иглы 120 относительно корпуса 102. В зависимости от положения хирурга относительно пациента (например, либо хирург осуществляет доступ к левому или правому глазу, или хирург находится слева или справа от пациента), угловое положение иглы 120 может регулироваться так, чтобы скос 360 иглы был повернут в требуемое положение относительно тканей глазного яблока. Такая особенность обеспечивает большую универсальность устройства при удержании устройства введения хирургом, при этом обеспечивается положение скоса, в котором он во время проникновения иглы через склеру направлен вверх. Это также может адаптировать использование того же устройства введения для операций на левом или правом глазу. В различных хирургических расположениях (в височной области, верхней височной области, в области правого глаза, в области левого глаза, для правой руки, для левой руки) удержание устройства введения может быть различным, обеспечивая удобный доступ. При предварительном повороте скоса иглы обеспечивается предварительная коррекция положения этого скоса, чтобы он был направлен вверх во время этапа проникновения в склеру.
Узел 104 иглы может содержать различные компоненты, соединенные между собой для обеспечения продольного перемещения иглы 120 относительно корпуса 102, а также возможности регулирования углового положения скоса 360 иглы. Как показано на фиг. 2, узел 104 иглы содержит узел 140 крепления иглы, соединенную с ним иглу 120, поворотный регулировочный элемент 370 и привод 164 иглы. Как показано на фиг. 17, поворотный регулировочный элемент 370 имеет центральное отверстие 372, в которое может входить и зацепляться дистальная соединительная часть 374 привода 164 иглы. Соединительная часть 374 может размещаться внутри отверстия 372 и блокирующего выступа или зацепа 376, который может фиксировать продольное положение привода 164 иглы относительно поворотного регулировочного элемента 370. При этом отверстие 372 и соединительная часть 374 могут быть выполнены так, чтобы обеспечивалась возможность свободного вращения регулировочного элемента 370 относительно привода 164 иглы. Например, отверстие 372 имеет, как правило, цилиндрическую форму, и соединительная часть 374 также имеет, как правило, цилиндрическую форму, но меньшего наружного диаметра.
Узел 140 крепления иглы может содержать полость 380, внутренняя поверхность которой имеет возможность зацепления с наружной поверхностью 382 поворотного соединительного элемента. Зацепление между наружной поверхностью 382 и полостью 380 может поворотно и продольно фиксировать поворотный регулировочный элемент 370 относительно узла 140 крепления иглы. Соответственно, по мере передачи продольного перемещения поворотным регулировочным элементом 370 от привода 164 иглы к узлу 140 крепления иглы, этот поворотный регулировочный элемент 370 позволяет хирургу регулировать угловое положение узла 140 крепления иглы относительно привода 164 иглы. Таким образом, игла 120, соединенная с узлом 140 ее крепления, может быть повернута так, что скос 360 займет требуемое положение относительно корпуса 102, как показано на фиг. 19А-19С.
На фиг. 18 показаны возможные варианты траектории и поворотная регулировка или регулировочное положение штифта 390 поворотного регулировочного элемента 370. Штифт 390 может перемещаться в пределах одного или нескольких проходов 392 траектории направляющего паза 394, выполненного в корпусе 102. Как показано на фиг. 18, направляющий паз 394 может включать в себя три прохода 392, обеспечивающих перемещение штифта 390 относительно корпуса 102, передавая поворотное перемещение к узлу 140 крепления иглы и игле 120 для регулировки углового положения скоса 360 относительно этого корпуса 102. Несмотря на то, что показанный направляющий паз имеет три прохода 392, могут быть и другие варианты выполнения, в которых может быть два, четыре, пять или более проходов. Кроме того, проход направляющего паза 394 также может быть выполнен в виде открытого пространства, обеспечивающего свободную регулировку углового положения в любом положении вдоль дугообразного прохода или вдоль наружной кольцевой дуги.
Фиксированное угловое положение скоса иглы устройства введения
Поворотный регулировочный элемент 370 может содержать приводной механизм (показан в виде штифта 390 на фиг. 17), обеспечивающий возможность регулирования углового положения скоса 360 относительно корпуса 102. Тем не менее, могут быть реализованы другие варианты выполнения, исключающие поворотный регулировочный элемент 370, что упрощает узел привода и иглу, и позволяет хирургу осуществлять управление поворотом всего устройства введения во время операции посредством поворота всего устройства как единого целого.
Например, фиг. 20-23В показан вариант выполнения устройства 400 введения, в котором исключена поворотная регулировка иглы относительно корпуса 102. Таким образом, несмотря на то, что узел привода и другие элементы устройства 400 введения могут быть выполнены по существу так же, как и другие соответствующие элементы устройства введения 100, описанного со ссылками на фиг. 1-16D, устройство 400 имеет упрощенную конструкцию, в которой не используется поворотный регулировочный механизм узла 140 крепления иглы. Как показано на фиг. 20, устройство введения содержит корпус 402, узел 404 иглы, а также скользящий элемент 410. Узел 404 иглы содержать основание 412, соединенное с приводом 414 иглы так, что этот привод 414 и это основание 412 имеют по существу фиксированное поворотное и продольное соединение. Таким образом, продольное перемещение привода 414 иглы вдоль продольной оси передается непосредственно к основанию 412 иглы. Кроме того, основание 412 иглы не будет поворачиваться относительно привода 414 иглы вокруг продольной оси устройства 400. Другие конструктивные особенности и элементы устройства 400 введения идентичные тем, которые описаны выше для устройства 100 введения, и повторно не описываются.
На фиг. 23А и 23В показан привод 414 иглы устройства 400 введения. Некоторые конструктивные особенности привода 414 иглы, такие как проксимальный конец и выступ, аналогичны тем, что представлены в описанном выше приводе 164 иглы. Однако дистальный конец привода 414 иглы отличается наличием соединительной поверхности 420, выполненной с возможностью зацепления с основанием 412 иглы для фиксации продольного и углового положения указанного привода 414 относительно этого основания 412 иглы. Таким образом, поворотный регулировочный элемент отсутствует.
Устройство введения с двойным приводным механизмом.
На фиг. 24-29 представлен еще один вариант выполнения устройства введения и его конструктивные особенности. На фиг. 24-25 показано устройство 500 введения, имеющее механизм 502 поворота, соединенный с корпусом 504 этого устройства 500. Механизм 502 поворота может быть применен в качестве альтернативного средства поворота компонента 160 привода узла 130 привода. Несмотря на это, устройство введения может также содержать скользящий элемент 506, функционирующий аналогично скользящему элементу 106 устройства 100 введения, и средства поворота компонента привода. Элементы и функции устройства 500 введения, подобные или идентичные элементам и функциям устройства 100 введения, повторно описываются.
Механизм 502 поворота содержит приводную часть 520 и соединительную часть 522. Соединительная часть 522 может быть выполнена с возможностью размещения в корпусе и вхождения в зацепление с узлом 130 привода. Например, соединительная часть 522 может содержать наружную поверхность, входящую в зацепление с направляющей поверхностью 198 компонента 160 привода. Соединительная часть 522 может быть приклеена или другим образом прикреплена к направляющей поверхности 198. Несмотря на это, соединительная часть может механически или фрикционно взаимодействовать с направляющей поверхностью 198.
Взаимодействие механизма 502 поворота и компонента 160 привода позволяет хирургу поворачивать этот компонент 160 привода посредством поворота приводной части 520 механизма 502 поворота. Таким образом, вместо и/или в дополнение к приведению в действие узла 130 привода посредством скользящего элемента 506, хирург может вручную поворачивать механизм 502 поворота для облегчения поворота компонента 160 привода. Такой вариант выполнения позволяет хирургу использовать либо продольное перемещение скользящего элемента 506 для приведения в действие устройства 500 введения, и/или использовать поворотное перемещение посредством механизма 502 поворота для приведения в действие устройства 500 введения.
На фиг. 26А, 26В показаны начальное и конечное положения привода 162 плунжера и привода 164 иглы в ответ на действие механизма 502 поворота. Приведение в действие узла 130 привода для его перемещения из исходного положения, показанного на фиг. 26А, в конечное положение, показанное на фиг. 26В, и взаимодействие между компонентом 160 привода, приводом 162 плунжера и приводом 164 иглы идентично тем, что указаны для устройства 100 введения и не будет описываться повторно.
Скользящий элемент 506 также может содержать рукоятку 510. Рукоятка 510 может быть соединена с радиально выступающей головкой 512 скользящего элемента 506 (аналогично скользящему элементу 106 устройства 100 введения). Рукоятка 510 обеспечивает большую область для облегчения захвата или воздействия усилия на скользящий элемент506. Таким образом, вместо использования только пальца или пальцев для приведения в действие головки 512, скользящая деталь 506 может быть приведена в действие рукояткой 510 посредством ладони, или иным образом.
На фиг. 27А, 27В показано положение шунта 300 внутри иглы 120 и относительно втулки 124, когда устройство 500 введения находится в исходном (фиг. 26А) и в конечном (фиг. 26В) положениях. Перемещение и принцип действия плунжера 122, иглы 120 и втулки 124, а также результирующее перемещение шунта 300 может быть по существу идентичным принципу действия и перемещению этих элементов в устройстве 100 введения.
На фиг. 28А, 28В показан корпус 504 устройства 500 введения. На фиг. 28А показана первая часть 530 корпуса 504, а на фиг. 28В - вторая часть 532 корпуса 504. Аналогично корпусу 102 устройства 100 введения, корпус 504 содержит пазы, соответствующие и облегчающие зацепление между подвижными выступами узла привода и корпусом 504.
Например, на фиг. 28А показан направляющий паз 550, позволяющий выступу Скользящего элемента проходить через корпус и входить в зацепление с узлом 130 привода. Вторая часть 532 корпуса 504 имеет паз 552, соответствующий выступам привода 162 плунжера и привода 164 иглы, обеспечивая те же преимущества, которые присущи устройству 100 введения. Кроме того, корпус 504 может содержать проксимальный конец 560 с отверстием 562, проходящим сквозь корпус в продольном направлении. Отверстие 562 может быть выполнено совместно с вырезами в первой и второй частях 530, 532 корпуса 504. Как показано на фиг. 25-26В, в корпусе 504 может размещаться соединительная часть 522, а часть механизма 502 поворота может проходить через отверстие 562, так что приводная часть 520 может быть легко зажата в руке хирургом. На фиг. 29 показано расположение механизма 502 поворота и других элементов устройства в этом варианте его выполнения.
Устройство 500 введения может также содержать стопор 528. Стопор 528 имеет головку 527 и соединительную часть 528. Соединительная часть 528 проходит через прорезь 550 корпуса 504 и соединяться с компонентом 160 привода так, что скользящий элемент 506 не может перемещаться в дистальном направлении через прорезь, и/или компонент 160 привода не может поворачиваться относительно корпуса 504. Однако стопор 526 может быть выведен из зацепления с компонентом 160 привода, допуская его поворот относительно корпуса 504. Таким образом, может быть обеспечено продольное или поворотное перемещение скользящего элемента 506 и/или механизма 502 поворота.
В некоторых вариантах осуществления изобретения устройство введения может обладать дополнительными конструктивными особенностями, что показано на фиг. 30А -32С. В частности, устройство введения может содержать различные рукоятки, облегчающие ручное приведение в действие устройства введения. В устройстве введения могут использоваться пружины или механизмы с приводом от двигателя для облегчения приведения в действие этого устройства без необходимости продольного перемещения скользящего элемента.
На фиг. 30А-30В показано устройство 600 введения, содержащее рукоятку 602, соединенную с головкой 604 скользящего элемента 606. Другие элементы и особенности устройства 600 введения могут быть идентичны или аналогичны соответствующим элементам и особенностям устройства 100 введения. Однако рукоятка 602 может быть выполнена с возможностью охватывания, окружения, или огораживания проксимального конца устройства 600 введения. При приведении в действие рукоятки 602 она может располагаться поверх корпуса 102 устройства 600 введения.
Альтернативные конструкции рукоятки устройства введения и ее особенности
На фиг. 30А показана рукоятка в первом положении 610, а на фиг. 30В - во втором положении 612. Аналогично описанию фиг. 26А-26В, перемещение и функционирование устройства 600 введения подобно или идентично перемещению и функционированию устройства 100 введения при перемещении рукоятки 602 из первого положения 610 во второе положение 612.
Как правило, конфигурация рукоятки 602 может обеспечивать более легкое осуществление захвата и/или приведение в действие устройства 600 введения и скользящего элемента 606 хирургом. Аналогично устройству 500 введения, устройство 600 введения также может содержать стопор 620, проходящий через паз и входящий в зацепление с компонентом привода узла привода, расположенного в корпусе 102. Когда стопор 620 отодвинут, рукоятка 602 может быть приведена в действие и перемещена в дистальном направлении из первого положения 610 во второе положение 612.
Функция и работа стопора 620 идентична стопору 526 и не будет описана далее.
Механический или электрический привод узла привода может обеспечить пошаговое перемещение элементов или их раздельное перемещение. Например, может быть выполнено шаговое перемещение привода плунжера, и дальнейшее перемещение узла привода может прекратиться до тех пор, пока хирург не выполнит новое перемещение или нажмет приводную кнопку для того, чтобы выполнить еще один шаг. Каждый шаг может потребовать дополнительных действий хирурга. Тем не менее, все этапы процесса также могут быть выполнены после одного движения руки или одного срабатывания кнопки.
Устройство введения может содержать одну или несколько индикаторных ламп (или цветных индикаторов), которые визуально могут указывать на стадию процесса или на то, что элемент устройства введения в настоящее время перемещается.
Узлы привода устройства введения, содержащие двигатель
На фиг. 31-32С показано устройство введения с приводом от двигателя, например, в котором помимо или дополнительно к усилию, действующему со стороны хирурга, может быть обеспечено механическое усилие для приведения в действие узла привода этого устройства введения. Усилие на поворот, действующее на привод, может быть получено или от электродвигателя, или от одной из нескольких механических систем, управляющих поворотным движением узла привода устройства введения.
На фиг. 31 показано устройство 700 введения, содержащее корпус 702 и узел 704 иглы, который может быть приведен в действие посредством узла 706 привода, расположенного в корпусе 702. Узел 706 привода содержит кнопку 710, запускающую поворотное движение компонента привода узла 130 привода (который может быть таким же, как в устройстве 100 введения). Узел 706 привода может быть снабжен двигателем, например, электрическим, мощность которого достаточна для приведения в действие узла 704 иглы.
Устройство 700 введения, показанное на фиг. 31, содержит узел 706 привода от двигателя, позволяющий хирургу перемещать узел 704 иглы посредством единственной кнопки 710. Узел 706 привода содержит двигатель 720, например, электрический, обеспечивающий приложение усилия на поворот к одному или нескольким элементам, или приложение продольного усилия к одному или нескольким элементам. Например, двигатель 720 обеспечивает приложение продольного дистального усилия к плунжеру и проксимального усилия втягивания к игле. Двигатель 720 может приводить в действие один или несколько, например три или более, элементов и обеспечивать движущую силу в дистальном или в проксимальном направлениях.
Узел 706 привода может быть соединен с узлом 704 иглы с возможностью снятия для его использования в многоразовом устройстве введения. Например, устройство 700 введения может быть выполнено разборным, так что его съемная часть (например, узел 130 привода и/или узел 704 иглы) может быть заменена после использования.
Устройство в любом из описанных вариантов его выполнения может представлять собой часть комплекта со сменными узлами приводов и/или узлами игл для облегчения повторного использования этого устройства. Устройство введения многоразового использования может быть выполнено на заказ (например, размер, длина, поперечное сечение, или эргономика) для определенной руки хирурга или на основе предпочтений хирурга для обеспечения максимального комфорта управления этим устройством. Кроме того, устройство может быть выполнено одноразовым.
На фиг. 32А-32С, показаны различные варианты выполнения устройства с использованием пружины для поворота компонента привода. В этих вариантах выполнения устройство введения содержит кнопочный приводной механизм. Как отмечалось со ссылками на фиг. 31, некоторые варианты выполнения узла привода могут содержать электродвигатель, обеспечивающий усилие для перемещения иглы при приведении в действие устройства введения. В устройстве, показанном на фиг. 32А-32С, узел привода приводится в движение посредством усилия пружины. Например, как показано на фиг. 32А-32С, узел привода содержит предварительно нагруженную пружину для выборочного перемещения одного или нескольких элементов устройства введения.
Устройство 740 введения, показанное на фиг. 32А, содержит узел 742 привода, включающий в себя кнопку 744, перемещающуюся вдоль продольной оси для выхода стопора 746 из зацепления с вращательным двигателем 750. Двигатель 750 содержит выходную деталь 752, соединенную с узлом 130 привода и выполненную с возможностью поворота в корпусе 102 устройства 740 введения. Проксимальный конец 754 выходной детали 752 соединен с пружиной 756, проксимальный конец которой соединен с основанием 760. Пружина 756 может быть предварительно нагружена или намотана так, что она прикладывает вращательное или поворотное усилие к проксимальному концу 754 выходной детали 752. Зацепление стопора 746 и ограничителя 762 ограничивает или предотвращает поворот выходной детали 752. Предварительно нагруженная пружина 756 может приводить в движение выходную деталь 752 (и, следовательно, узел 130 привода) только тогда, когда хирург перемещает кнопку 744 в дистальном направлении, что приводит к выведению стопора 746 из зацепления с ограничителем 762.
Кнопка 744 и стопор 746 могут быть выполнены на противоположных концах приводного элемента 764. Приводной элемент 764 может быть выполнен с возможностью продольного перемещения относительно корпуса 102. Зацепление между стопором 746 и ограничителем 762 выходной детали 752 может быть фрикционным. Зацепление стопора 746 и ограничителя 762 выходной детали 752 может представлять собой механическое зацепление между их комплементарными формами. Например, стопор 746 может содержать один или несколько выступов или пазов, которые могут входить в зацепление с одним или несколькими соответствующими пазами или выступами ограничителя 762. Стопор 746 может содержать зуб, входящий в зацепление с одним из нескольких зубьев, выполненных на ограничителе 762. Соответственно, когда кнопка 744 перемещается в дистальном направлении, приводной элемент 764 может быть перемещен в этом же направлении, отделяя стопор 746 от ограничителя 762 и выводя этот стопор 746 из зацепления, так что выходная деталь 752 может поворачиваться. Такое приведение в действие может обеспечить выполнение только одного этапа процесса установки шунта (что требует множества нажатий кнопки 744 для завершения процесса) или выполнения всех этапов процесса (при этом требуется только одно нажатие кнопки 744).
Вращение выходной детали 752 может обеспечить движение или поворот узла 130 привода устройства 700 введения. Узел 130 привода может обеспечивать те же функции, что и описанный выше узел привода устройства 100 введения. Соответственно, описание деталей и функций элементов этого узла не приводится. Таким образом, устройство 740 введения может иметь подпружиненный однокнопочный приводной механизм, обеспечивающий постепенное приведения в действие и перемещение узла 130 привода устройства 740 введения.
Кроме того, могут быть существовать и другие варианты выполнения подпружиненного узла привода. Например, на фиг. 32В показано устройство 780 введения, содержащее приводной элемент 782, который может по выбору входить в зацепление с ограничителем 784 выходной детали 786 узла 790 привода устройства 780 введения. Аналогично варианту выполнения, описанному со ссылкой на фиг. 32А, в устройстве 780 может использоваться предварительно нагруженная пружина, обеспечивающая поворот выходной детали 786. Поворот выходной детали 786 может быть ограничен посредством контакта приводного элемента 782 с ограничителем 784. Несмотря на это, в варианте выполнения, представленном на фиг. 32В, в приводном элементе 782 используется радиальное зацепление или соединение, посредством которого ограничитель 784 узла 790 привода перемещается в радиальном направлении. Такое радиальное зацепление резко отличается от продольного зацепления между приводным элементом 764 и ограничителем 762, который перемещается вдоль продольной оси (фиг. 32А). Таким образом, устройство 780 введения может содержать радиально приводимый в действие кнопочный узел привода, позволяющий хирургу по выбору активировать одну или несколько функций, или один или несколько этапов перемещения узла привода этого устройства.
Для обеспечения радиального зацепления с ограничителем 784 приводной элемент 782 может содержать стопор 792, выступающий от этого приводного элемента 782. Приводной элемент 782 может содержать круглое кольцо или его часть, которая проходит от кнопки 794. Приводной элемент 782 может содержать целое кольцо или часть кольца и проходить по окружности или поперек выходной детали 786 так, что стопор 792 располагается в положении, противоположном расположению кнопки 794.
Выходная деталь 786 может иметь по существу круглое поперечное сечение в области ограничителя 784, который может входить в зацепление со стопором 792 приводного элемента 782. Как показано на фиг. 32В, стопор 792 может располагаться на нижнем конце круглого перечного сечения выходной детали 786, а кнопка 794 может располагаться на противоположном верхнем конце этого круглого поперечного сечения. Приводной элемент 782 может быть смещен в положение зацепления (показано на фиг. 32В) посредством усилия пружины 796, которая отжимает кнопку 794. Пружина 796 может давить на корпус 102 и нижнюю или приводную поверхность, или на кнопку 794. Таким образом, пружина 796 может обеспечить радиальное усилие, которое давит на кнопку 794 в направлении от выходной детали 786, так что стопор 792 принудительно входит в зацепление с ограничителем 784, как показано на фиг. 32В.
Зацепление между стопором 792 и ограничителем 784 может быть преодолено посредством нажатия на кнопку 794 по направлению к корпусу 102, преодолевая усилие пружины 796. Зацепление между стопором 792 и ограничителем 784 может быть преодолено посредством нажатия на приводной элемент 782, которое обеспечит поворот выходной детали 786 и последующее перемещение узла 130 привода. Другие конструктивные особенности и элементы узла 790 привода, включая основание и пружину, а также фрикционное взаимодействие или механическое зацепление между стопором 792 и ограничителем 784, могут быть выполнены согласно тому, как это описано выше применительно к показанному на фиг. 32А устройству 740 введения.
На фиг. 32А и 32В, показано альтернативное зацепление подпружиненного узла привода, и его приведение в действие, а на фиг. 32С показана альтернативная конструкция устройства введения, в которой узел привода смещен от центра корпуса в отличие от устройств введения, показанных на фиг. 32А и 32В.
На фиг. 32С показано устройство 800 введения, содержащее привод 802, в котором используется такое же радиальное приведение в действие, как и в варианте выполнения, показанном на фиг. 32В. Однако в отличие от варианта выполнения, показанного на фиг. 32В, привод 802 может располагаться между узлом 130 привода и узлом 104 иглы. Такое расположение позволяет создать конструкцию устройства введения с радиальным зацеплением для использования кнопки 804, располагающейся ближе к дистальному концу устройства 800 введения по сравнению с устройством 780 введения. Таким образом, могут быть созданы разные варианты выполнения устройства введения с размещением кнопки в различных положениях.
Для размещения привода 802, смещенного от центра корпуса и относительно узла привода 130, конструкция и продольная длина элементов этого узла 130 привода могут быть изменены. Например, привод плунжера и привод иглы может быть длиннее в продольном направлении, чем привод плунжера и привод иглы, показанные на фиг. 32А-32В. В дополнение к этому, основание 806 привода может иметь отверстие или центральный проем, через который может проходить элемент узла 130 привода. Другие особенности и модификации устройства 800 введения могут быть аналогичны тем, которые описаны выше для устройств 740, 780, и не будут повторно описываться.
В любом из вариантов выполнения, показанных на фиг. 32А-32С, элемент узла 130 привода может быть изменен, чтобы содержать ограничитель для зацепления со стопором. Кроме того, элемент узла привода также может быть соединен непосредственно с пружиной. Таким образом, может быть не использована выходная деталь. Кроме того, основание, с которым соединен конец пружины, может представлять собой конструкцию, выполненную на внутренней части корпуса.
Устройство фиксации имплантата
Согласно некоторым вариантам изобретение может относиться к устройству фиксации имплантата, которое способствует удержанию шунта внутри иглы во время транспортировки и перевозки устройства введения или узла иглы. Таким образом, устройство введения может быть использовано в сочетании с устройством фиксации шунта, который входит в зацепление с иглой для предотвращения случайного выхода шунта из иглы.
На фиг. 33 показан дистальный конец устройства введения, в котором игла 120 содержит шунт 300. Устройство 820 фиксации шунта может входить в зацепление с дистальным концом 822 иглы 120. Устройство 820 фиксации может представлять собой продолговатое тело 824, содержащее первый конец 826 и второй конец 828. Первый конец 826 сужается от большего диаметра поперечного сечения к меньшему диаметру поперечного сечения. Меньший диаметр поперечного сечения может быть меньше внутреннего диаметра дистального конца 822 иглы 120. Таким образом, первый конец 826 может быть вставлен в просвет 830 иглы 120.
Продолговатое тело 824 может быть выполнено так, что сужение первого конца 826 обеспечивает изменение диаметра поперечного сечения. Диаметр может сужаться постепенно или ступенчато.
Как показано на фиг. 33, поперечное сечение, примыкающее ко второму концу 828, может быть больше, чем поперечное сечение около первого конца 826. Диаметр поперечного сечения продолговатого тела 824 может увеличиваться от диаметра, меньшего, чем внутренний диаметр просвета 830 иглы 120, до диаметра, большего, чем внутренний диаметр просвета 830. Таким образом, продолговатое тело 824 может быть вставлено в просвет 830 иглы 120 и продвинуто в положение, в котором его поперечное сечение приблизительно равно внутреннему диаметру просвета 830, ограничивая дальнейшее перемещение устройства 820 фиксации в просвет 830.
Продолговатое тело 824 может фрикционно входить в зацепление с дальним концом 822 иглы 120. Например, устройство 820 фиксации может быть посажено с натягом в иглу 120 для создания фрикционного зацепления между наружной поверхностью продолговатого тела 824 и внутренней поверхностью просвета 830. Такое фрикционное зацепление может быть преодолено посредством действия усилия разъединения на второй конец 828 устройства 820 фиксации, извлекая его из просвета 830.
Несмотря на то, что устройство 820 фиксации показано с круглым поперечным сечением, также возможны другие варианты формы поперечного сечения, например, треугольное, квадратное, прямоугольное, многоугольное, в виде звездочки или других подобных форм. Кроме того, устройство 820 фиксации может быть изготовлено из стали, а также может соприкасаться только с внутренней частью скоса иглы и преимущественно не оказывать воздействие на остроту иглы, которая определяется ее наружными кромками.
Устройство 820 фиксации гарантирует, что шунт 300 случайно не выпадет или не выдвинется из иглы 120, а также будет защищен и не поврежден при транспортировке или первоначальных манипуляциях с устройством введения или с узлом иглы. Когда хирург готов к имплантации шунта 300, устройство 820 фиксации может быть выведено из иглы 120, и может быть проведена операция.
Операции имплантации шунта
На фиг. 34А-39 показаны различные операции, которые могут быть выполнены согласно некоторым вариантами осуществления изобретения. Такие операции могут позволить хирургу расположить выпускной конец интраокулярного шунта внутри области или зоны пониженного давления внутри глазного яблока, при этом оставляя входной конец шунта в жидкостном сообщении с передней камерой глазного яблока. Операции по созданию пространства для первоначального продвижения дистального конца шунта в глазное яблоко с использованием методики «tenting» (тентинг) для отслоения более поверхностного слоя глазного яблока (например, конъюнктивы или другого слоя, например, эписклерального слоя) от глубокого слоя глазного яблока (например, склеры или другого слоя, такого как эписклеральный слой) в области оттока глазного яблока, может значительно облегчить первичное размещение и продвижение шунта. Посредством такой операции дистальный конец шунта может быть защищен во время продвижения в глазное яблоко и может быть сохранена его целостность. В отличии от этого способа, известные способы, в которых шунт просто выталкивается в глазное яблоко (например, в субконъюнктивальное пространство, супрахориоидальное пространство, или субэписклеральное пространство) могут часто повреждать шунт посредством его закупоривания или разрыва его дистальной части, или в результате перекручивания шунта или его деформирования за счет дистального толкающего усилия, исходящего от проксимального конца шунта, в то время как дистальный конец шунта сдерживается конъюнктивой и не может выйти из иглы.
На фиг. 34А показано глазное яблоко 850, имеющее переднюю камеру 852, роговицу 854, склеру 856, конъюнктиву 858 и эписклеральное пространство или слой 860. В соответствии с одним из вариантов выполнения операции имплантации интраокулярного шунта игла 870 устройства введения может быть введена через роговицу в переднюю камеру 852 и расположена вблизи угла передней камеры 862. Игла 870 имеет скос 872. Скос 872 перемещают через переднюю камеру 852 до тех пор, пока он не окажется около угла 862 этой передней камеры. Когда скос 872 окажется на месте, он может быть повернут или ориентирован так, чтобы он проходилпо существу параллельно конъюнктиве 858.
Например, как показано на фиг. 34А, скос 872 может быть повернут так, чтобы поверхность скоса 872 или плоскость, через которую проходит поверхность скоса, находилась на одной линии или проходила по существу параллельно плоскости или поверхности, через которую проходит конъюнктива 858. До или во время продвижения иглы 870 в склеру 856 хирург может визуально проверить угловое положение скоса 872 и отрегулировать его до тех пор, пока поверхность этого скоса не станет по существу параллельной плоскости или поверхности конъюнктивы 858. Когда скос 872 достигает поверхности раздела конъюнктивы и склеры или субконъюнктивального пространства (примыкающего к конъюнктиве 858), поверхность скоса может быть расположена вблизи, вплотную, или по существу совмещена с конъюнктивальной плоскостью, как показано на фиг. 34А.
После достижения положения, показанного на фиг. 34А, хирург может повернуть иглу 870 до тех пор, пока скос 872 не начнет оттеснять конъюнктиву 858 от склеры 856, как показано на фиг. 34В. Эта операция, которая может называться как «тентинг» (натяжение) конъюнктивы 858, может создать небольшое пространство или зазор между конъюнктивой и склерой, примыкающей к скосу иглы 870. После того, как посредством тентинга конъюнктивы 858 было создано пространство 876, шунт 300 может быть выдвинут из иглы 870 в пространство 876. В результате шунт 300 может быть существенно легче вытолкнут в пространство 876, так как конъюнктива 858 отодвинута в сторону и непосредственно не затрудняет продвижение шунта 300 в субконъюнктивальное пространство.
На фиг. 34А-34С показано размещение шунта посредством операции «тентинга» в субконъюнктивальное пространство 876, расположенное на поверхности склеры 856. На фиг. 35А-35С показана другая операция «тентинга», которая может быть выполнена с использованием тех же этапов, как и операция «тентинга», показанная и описанная со ссылкой на фиг. 34А-34С. Однако операция, показанная на фиг. 35А-35С выполняется посредством «тентинга» конъюнктивы 858, которая располагается на поверхности эписклерального слоя 860. Таким образом, игла 870 может быть продвинута под другим углом относительно угла, который показан на фиг. 34А-34С, так что скос 872 иглы 870 проходит через склеру 856 и выходит из нее до тех пор, пока этот скос 872 не пройдет через часть эписклерального слоя 860. После того, как скос иглы 872 разместится вблизи конъюнктивы 858 на поверхности эписклерального слоя 860 или выше него, как показано на фиг. 35А, скос 872 иглы 870 можно повернуть для создания пространства 880 между конъюнктивой 858 и эписклеральным слоем 860. Затем субконъюнктивальное пространство 880 может обеспечить зазор или проем, обеспечивающий выход дистального конца шунта 300 из иглы 870 без существенного противодействия к дистальному продвижению шунта 300.
Подобно вариантам выполнения операции «тентинга», показанным на фиг. 34А-35С, на фиг. 36А-36С показана операция «тентинга» для слоев, прилегающих к области оттока глазного яблока. Операция может быть выполнена аналогично описанным выше. Однако, как показано на фиг. 36А, игла 870 продвигается до тех пор, пока скос 872 не достигнет поверхности раздела склеры 856 и эписклерального слоя 860. После этого, скос 872 может быть повернут до тех пор, пока эписклеральный слой 860 не будет оттеснен от склеры 856 для создания пространства 884 между этим эписклеральным слоем 860 и склерой 856. После этого, как показано на фиг. 36С, шунт 300 может быть продвинут в пространство 884.
В любой из описанных выше операций, скос 872 может быть повернут на угол от 10° до 60° для натяжения поверхностного слоя относительно глубокого слоя. Однако игла может быть повернута на угол от 25° до 135°, от 50° до 120°, от 70° до 110°, а в некоторых вариантах - на 90°. Таким образом, могут быть выполнены различные операции, в которых создается пространство между поверхностным слоем, например, конъюнктивой или эписклеральным слоем, и глубоким слоем, таким как склера или эписклеральный слой. Пространство, созданное между поверхностным и глубоким слоями, может быть расположено в любом из местоположений относительно передней камеры 852. Таким образом, при выполнении операций хирург может определять оптимальное местоположение для пространства, в зависимости от того какая область оттока необходима.
В отличие от показанных на фиг. 34А-36С операций с «тентингом» поверхностного слоя относительно глубокого слоя на фиг. 37А-39 показаны операции, во время которых поверхностный слой может быть отделен от глубокого слоя, или посредством которых целевая область оттока может быть увеличена в размерах для облегчения продвижения шунта в эту область без повреждения шунта или без необходимости преодоления существенного сопротивления. Эти цели и задачи аналогичны тем, которые достигаются посредством операций, описанных выше со ссылкой на фиг. 34А-36С.
Как показано на фиг. 37, игла 870 может перемещаться в положение, аналогичное показанному на фиг. 35А, в котором скос 872 располагается глубоко в конъюнктиве 858 (на фиг. 35А показанной на поверхности эписклерального слоя, при этом скос 872 также может быть расположен на поверхности склеры). Скос 872 может быть расположен на пересечении границ или поверхностей раздела конъюнктивы 858 и эписклерального слоя 860. Когда скос 872 находится в заданном положении, из иглы 870 может быть выпущена жидкость для заполнения или раздутия пространства 890 между конъюнктивой и эписклеральным слоем 860. В результате может быть создано и поддерживаться пространство 890, так что шунт может быть продвинут в это пространство 890 для позиционирования отводящего конца шунта в этом пространстве 890 без повреждения шунта или препятствованию его перемещения.
Жидкость, используемая для заполнения пространства, может содержать сбалансированный солевой раствор (BSS), вискоэластичный материал, воду, лидокаин или их эквиваленты. Например, созданное субтеноново пространство (между эписклеральным слоем и склерой) может быть заполнено вискоэластиком. Кроме того, созданное в эписклеральном слое пространство может быть заполнено водой.
На фиг. 38 показана операция, в которой игла 870 продвигается до тех пор, пока скос 872 не разместиться внутри эписклерального слоя 860. Когда срез 872 иглы располагается внутри слоев эписклерального слоя 860, например, между поверхностным и глубоким слоями этого эписклерального слоя 860, из иглы 870 может быть выпущена жидкость для расширения или набухания эписклерального слоя 860, увеличивая пространство внутри этого эписклерального слоя 860. Например, такое набухание может уменьшить плотность эписклерального слоя 860, вызывая дополнительное удаление друг от друга перемычек (структур, которые соединяют поверхностный и глубокий слои эписклерального слоя 860) за счет увеличения расстояния между смежными перемычками или путем растягивания перемычек для обеспечения возможности продвижения дистального конца шунта с более низким сопротивлением, чем в необработанной зоне.
На фиг. 39 показан еще один вариант осуществления операции для создания пространства между прилегающими слоями в целевой области. Игла 870 может продвигаться до тех пор, пока ее скос 872 не расположится на поверхности раздела или между эписклеральным слоем 860 и склерой 856. Как показано, жидкость может выпускаться из иглы 870 вплоть до создания пространства 892 посредством наполнения поверхности раздела между эписклеральным слоем 860 и склерой 856. Аналогично другим операциям, описанным выше, пространство 892 может быть использовано для создания начальной области, через которую дистальный конец шунта может быть продвинут так, чтобы он не был поврежден и не испытывал значительного сопротивления при продвижении в целевую область оттока.
Операции, представленные на фиг. 34А-39, показывают различные способы, посредством которых выпускное пространство или область оттока может быть подготовлена для приема отводящего конца шунта так, чтобы он не повреждался и/или испытывал меньшее сопротивление при продвижении в целевую область оттока (по сравнению с необработанной областью). Другие области оттока, такие как супрахориоидальное пространство, интрасклеральное пространство и другие могут быть использованы согласно одному или нескольким описанным способам. Некоторые из способов могут быть объединены (например, поверхностный слой может быть натянут механически посредством поворота скоса, а затем наполнен выпущенной из иглы жидкостью). Кроме того, специалистом в данной области могут быть внесены изменения в осуществление способов в рамках изобретения.
Настоящее описание позволяет специалисту в этой области применять на практике различные описанные выше конфигурации. Следует понимать, что изобретение не ограничивается описанными вариантами его осуществления.
Возможны различные варианты осуществления изобретения. Различные функции и элементы могут отличаться от описанных выше, не выходя за объем изобретения. Различные модификации этих конструкций очевидны для специалиста в данной области, а общие принципы изобретения могут быть применены к другим конструкциям.
Порядок или последовательность этапов способов представлена в качестве примера и может быть изменена. Некоторые этапы могут быть выполнены одновременно.
Используемая в данном описании фраза «по меньшей мере один из» предшествующего ряда пунктов с термином «и» или «или» для того, чтобы отделить какой-либо из элементов, изменяет список в целом, а не каждый элемент списка (то есть, каждый пункт). Фраза «по меньшей мере один из» не требует выбора по меньшей мере одного из каждого пункта, который указан; скорее, фраза позволяет значение, которое включает по меньшей мере один из любого одного из пунктов, и/или по меньшей мере один из любой комбинации пунктов, и/или по меньшей мере, один из каждого из пунктов. В качестве примера, фразы «по меньшей мере один из А, В и С» или «по меньшей мере один из А, В или С», каждая относится только к А, только кВ, или только к С; любой комбинации из А, В и С; и/или по меньшей мере одному из каждого из А, В, и С.
Такие термины, как «сверху», «снизу», «перед», «задний» и т.п., используемые в данном описании, следует понимать как относящиеся к произвольной системе отсчета, а не к обычной гравитационной системе отсчета. Таким образом, верхняя поверхность, нижняя поверхность, передняя поверхность и задняя поверхность могут проходить вверх, вниз, по диагонали или по горизонтали в гравитационной системе отсчета.
Более того, в той степени, что термин «включать», «иметь», или тому подобное используется в описании или формуле изобретения, такой термин предназначен быть включающим способом, аналогичным термину «включает» как «содержит», интерпретируется, когда используется в качестве переходного слова в формуле изобретения.
Слова «приводимый в качестве примера» используется в настоящем описании для обозначения «служащий в качестве примера, отдельного случая или иллюстрации». Любой вариант реализации изобретения, описанный в настоящем документе как «приводимый в качестве примера», не обязательно должен быть истолкован как предпочтительный или преимущественный над другими вариантами реализации изобретения.
Ссылка на элемент в единственном числе не означает «один и только один», если специально не указано иное, а скорее «один или более». Местоимения в мужском роде (например, его) включают в себя женский и средний род (например, ее и его), и наоборот. Термин «несколько» относится к одному или более. Подчеркнутые и/или выделенные курсивом заголовки и подзаголовки используются исключительно для удобства, не ограничивают предмет изобретения, и не упоминаются в связи с интерпретацией описания предмета изобретения. Все структурные и функциональные эквиваленты элементов различных конфигураций, описанных в данном изобретении, которые известны или позже стали известны специалистам в данной области, специально включены в настоящее описание в качестве ссылки, и охватываются предметом изобретения. Более того, мелочи, описанные в настоящем документе специально предназначены для общественности независимо от того, является ли такое раскрытие явно читаемым в приведенном выше описании.
Хотя подробное описание содержит много особенностей, их не следует рассматривать как ограничивающие объем предмета изобретения, а лишь как иллюстрацию различных примеров и аспектов предмета изобретения. Следует иметь в виду, что объем предмета изобретения включает в себя другие варианты реализации изобретения, не описанные подробно выше. Различные другие модификации, изменения и вариации могут быть сделаны в конструкции, работе и деталях способа и устройства предмета изобретения, описанных в данном документе, не отступая от сущности и объема настоящего изобретения. Если иное не выражено, ссылка на элемент в единственном числе не означает «один и только один», если явно не указано обратное, но скорее предназначается, чтобы означать «один или более». Кроме того, нет необходимости для устройства или способа разрешить вопросы, связанные с каждой проблемой, которая разрешима (или обладает всеми преимуществами, которые достижимы) по различным вариантам реализации изобретения для включения в объем изобретения. Использование в данном документе «может» и их производных следует понимать в смысле «возможности» или «необязательно», в отличие от положительного потенциала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ИНТРАОКУЛЯРНОГО ШУНТА | 2018 |
|
RU2759894C1 |
| АВТОИНЪЕКТОР В СБОРЕ | 2021 |
|
RU2832825C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДОСТАВКИ ГЛАЗНОГО ИМПЛАНТАТА | 2015 |
|
RU2695563C2 |
| БЕЗОПАСНЫЙ ШПРИЦ С УБИРАЮЩЕЙСЯ ИГЛОЙ ДЛЯ ВЗЯТИЯ ПРОБЫ КРОВИ | 2012 |
|
RU2580295C2 |
| РАЗМЕЩЕНИЕ АВ EXTERNO ВНУТРИГЛАЗНОГО ШУНТА | 2016 |
|
RU2687764C1 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2015 |
|
RU2687176C2 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2019 |
|
RU2778424C2 |
| СПОСОБ ВВЕДЕНИЯ ГЛАЗНЫХ ИМПЛАНТАТОВ И ПРЕДНАЗНАЧЕННОЕ ДЛЯ ЭТОГО УСТРОЙСТВО | 2003 |
|
RU2294722C2 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2019 |
|
RU2778723C2 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДОСТАВКИ ЛЕКАРСТВЕННОГО СРЕДСТВА | 2019 |
|
RU2778422C2 |
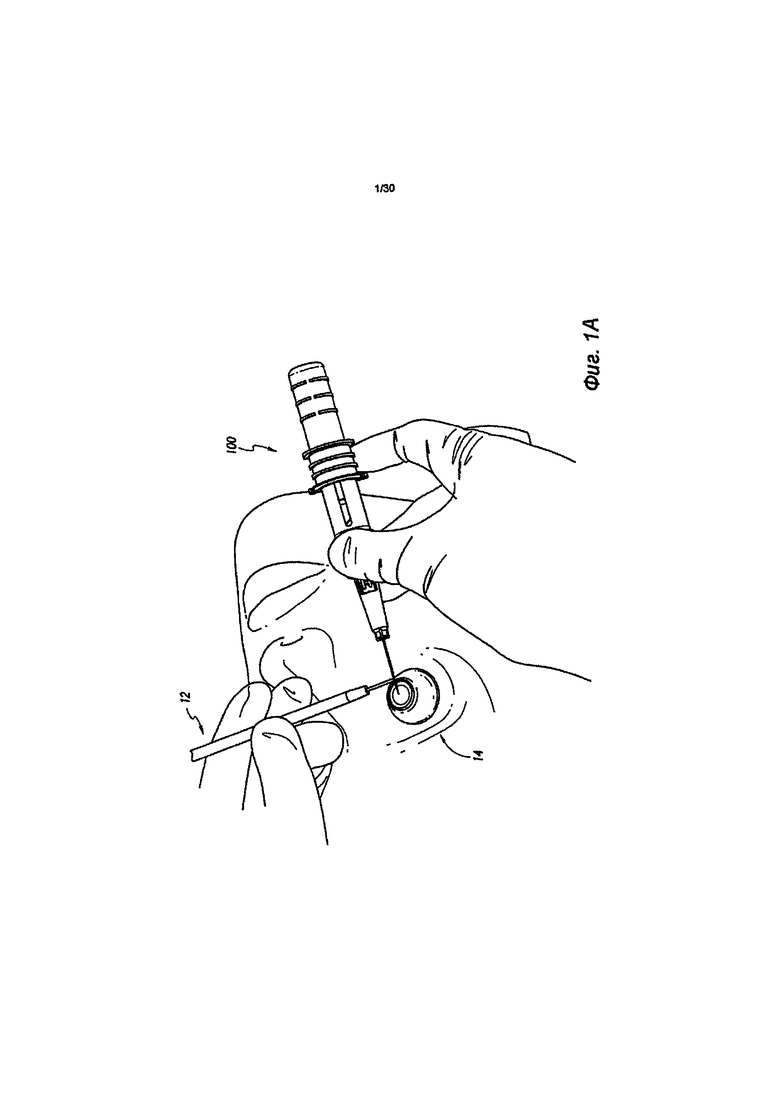
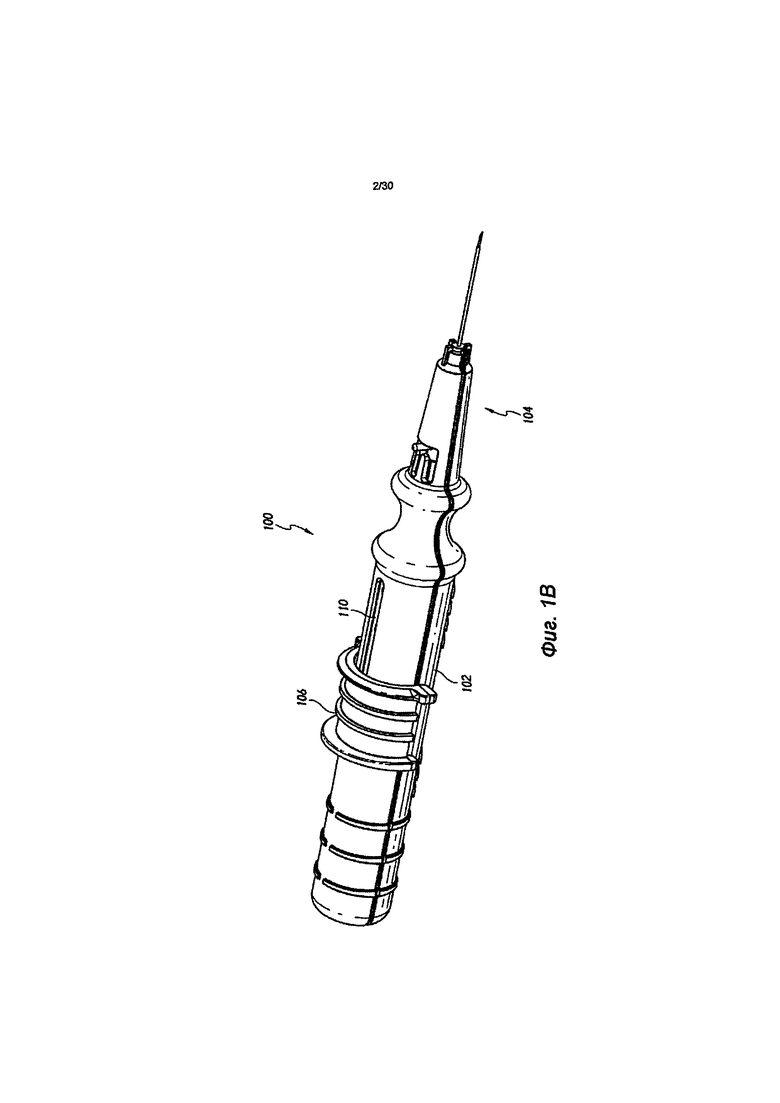
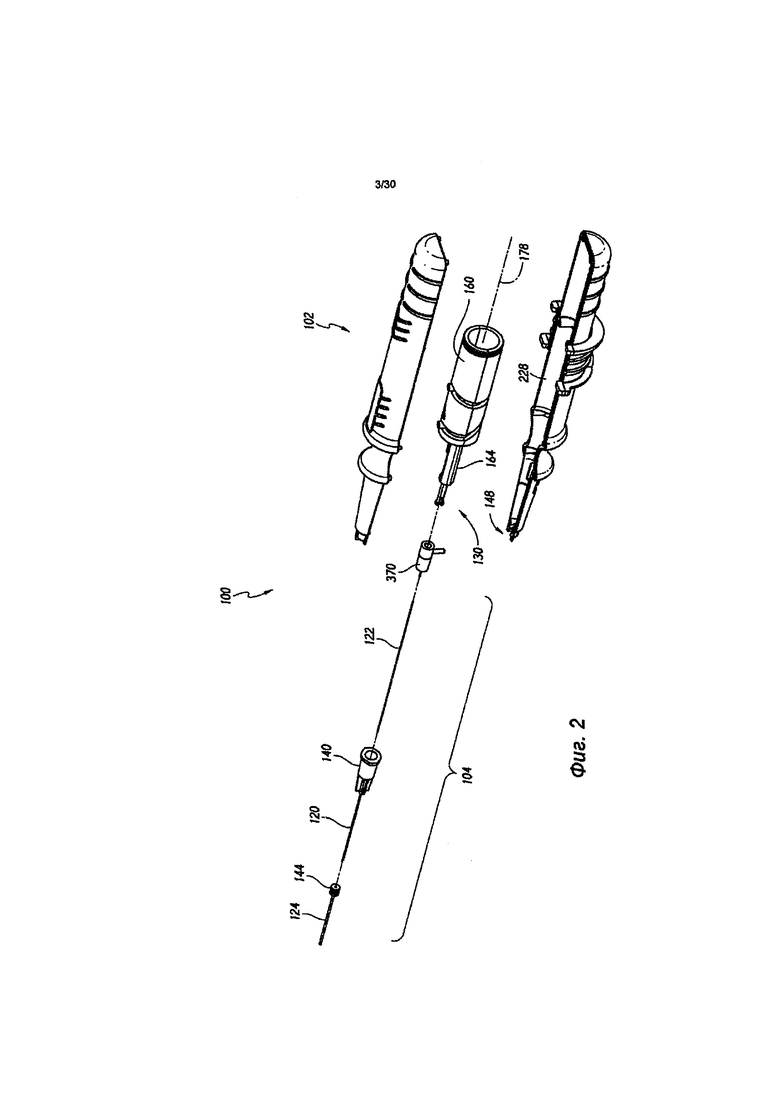
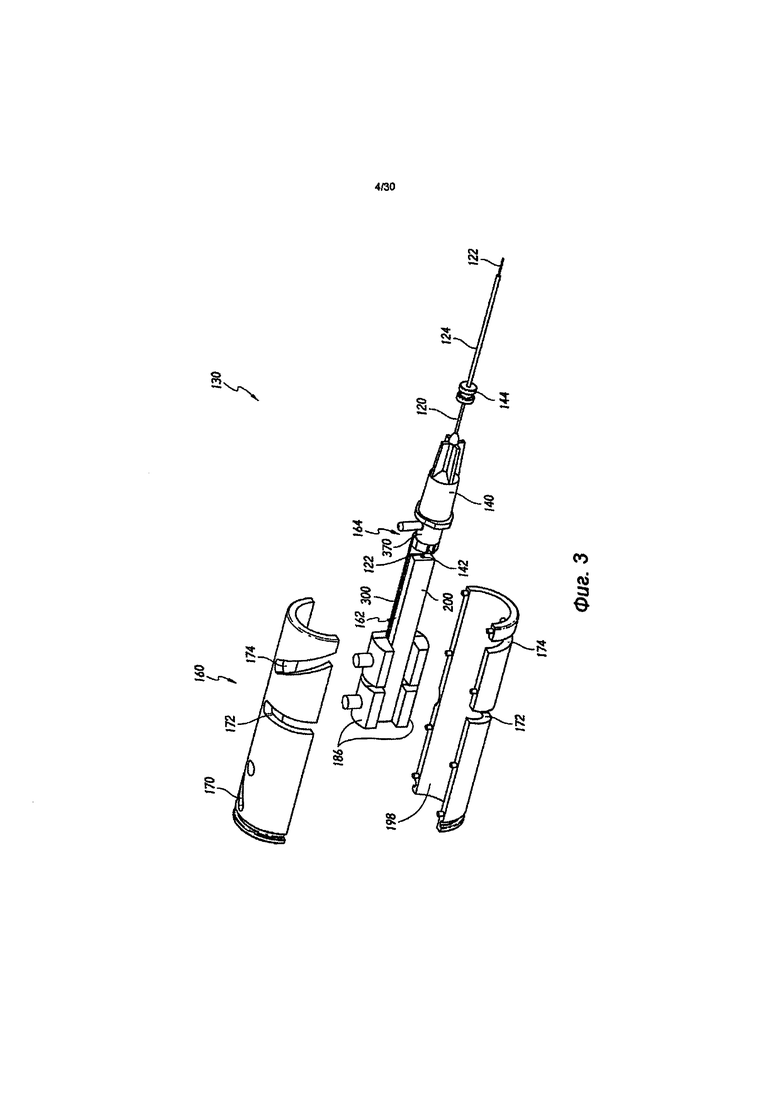
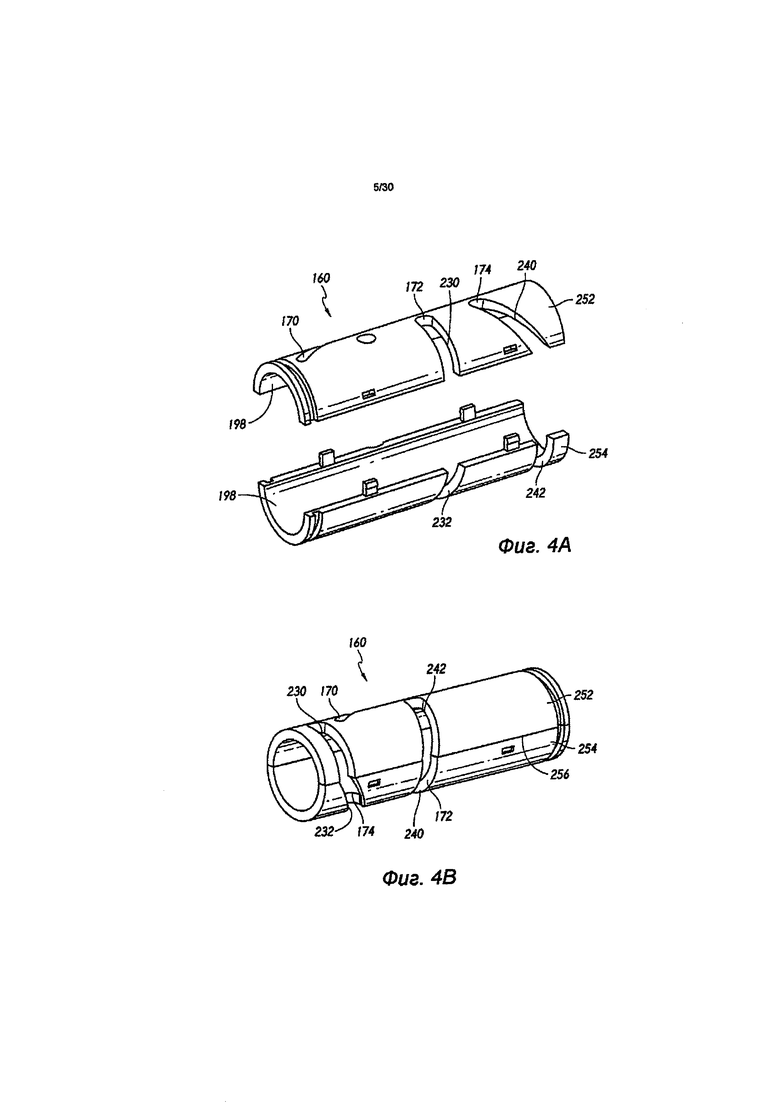
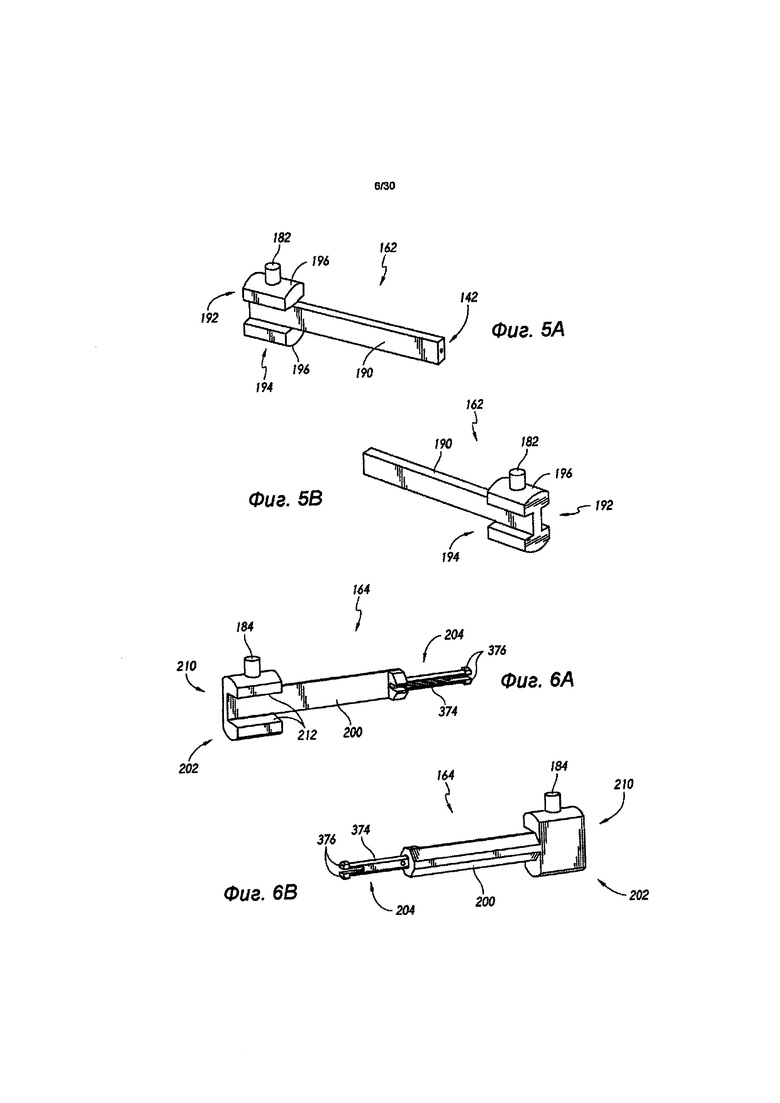
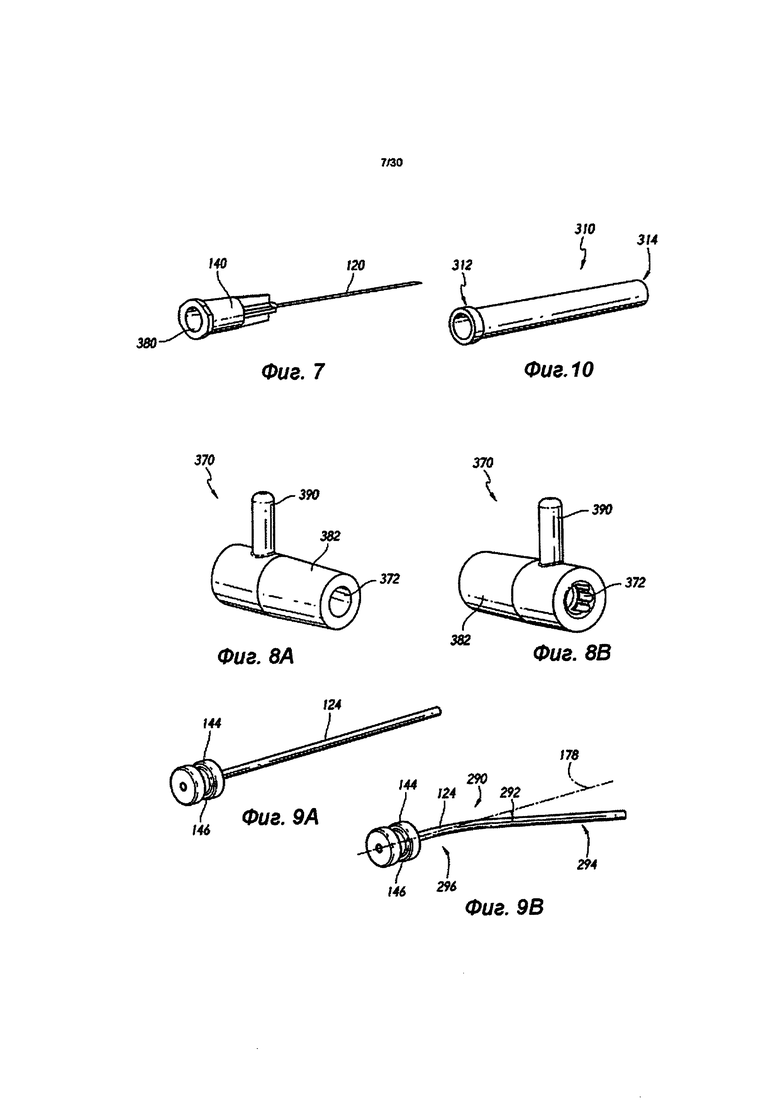
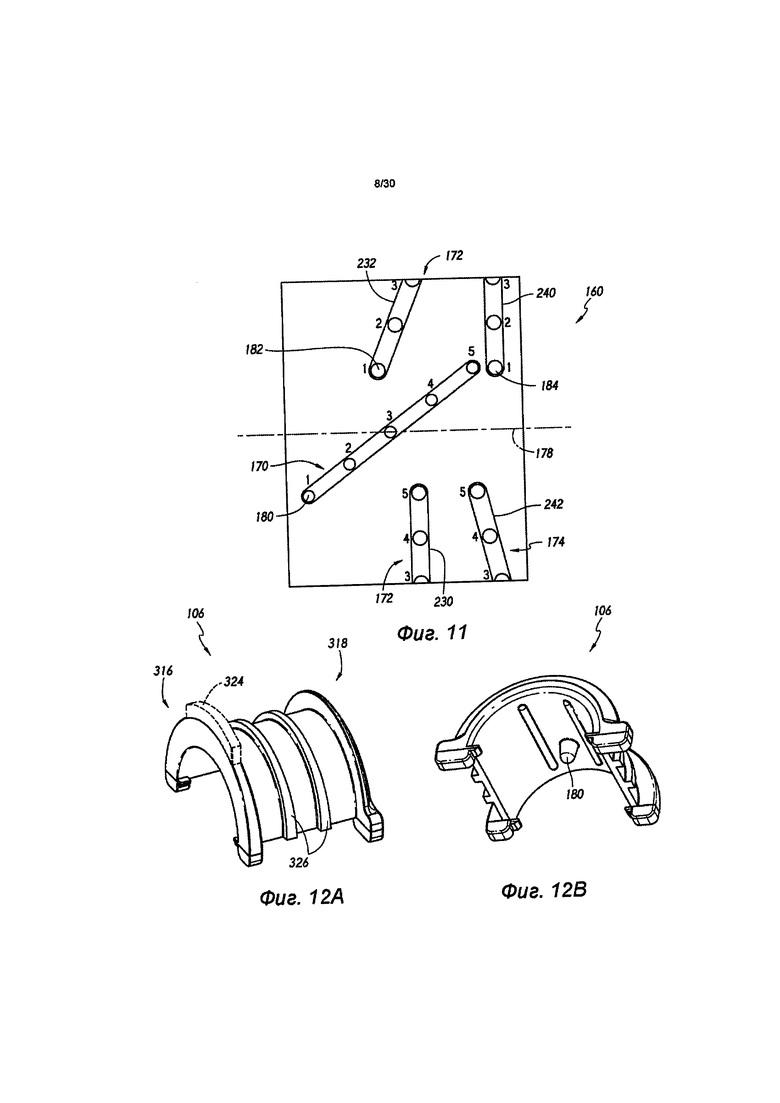
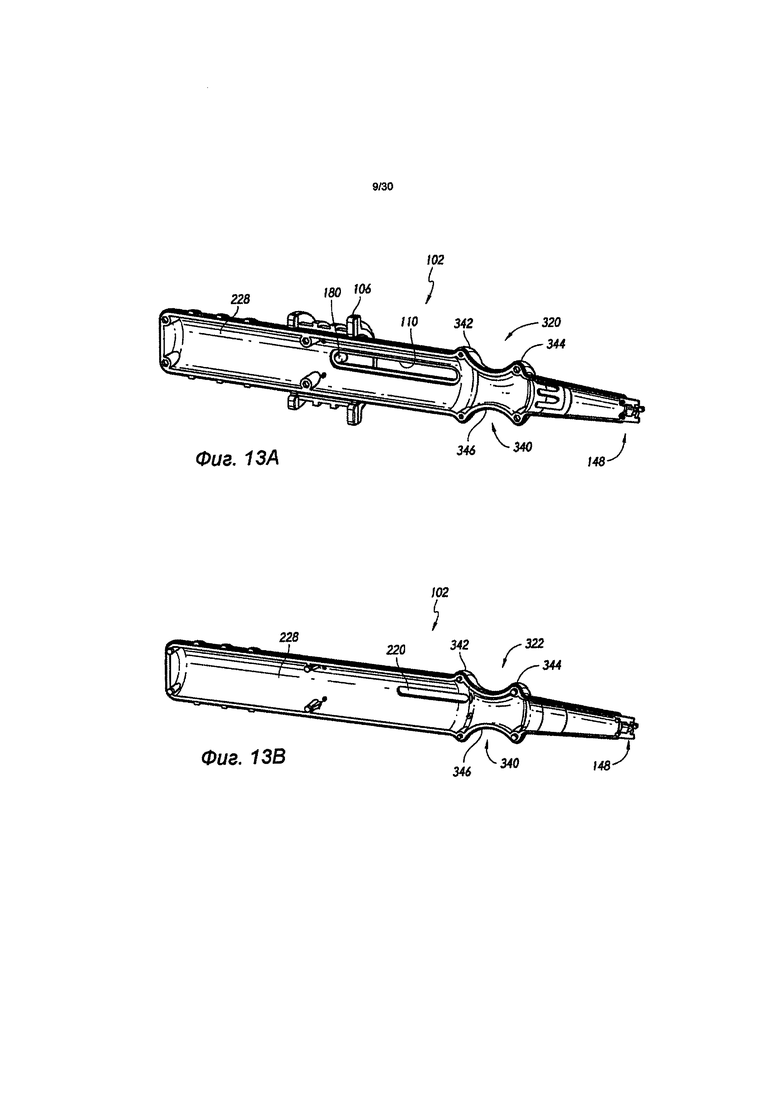
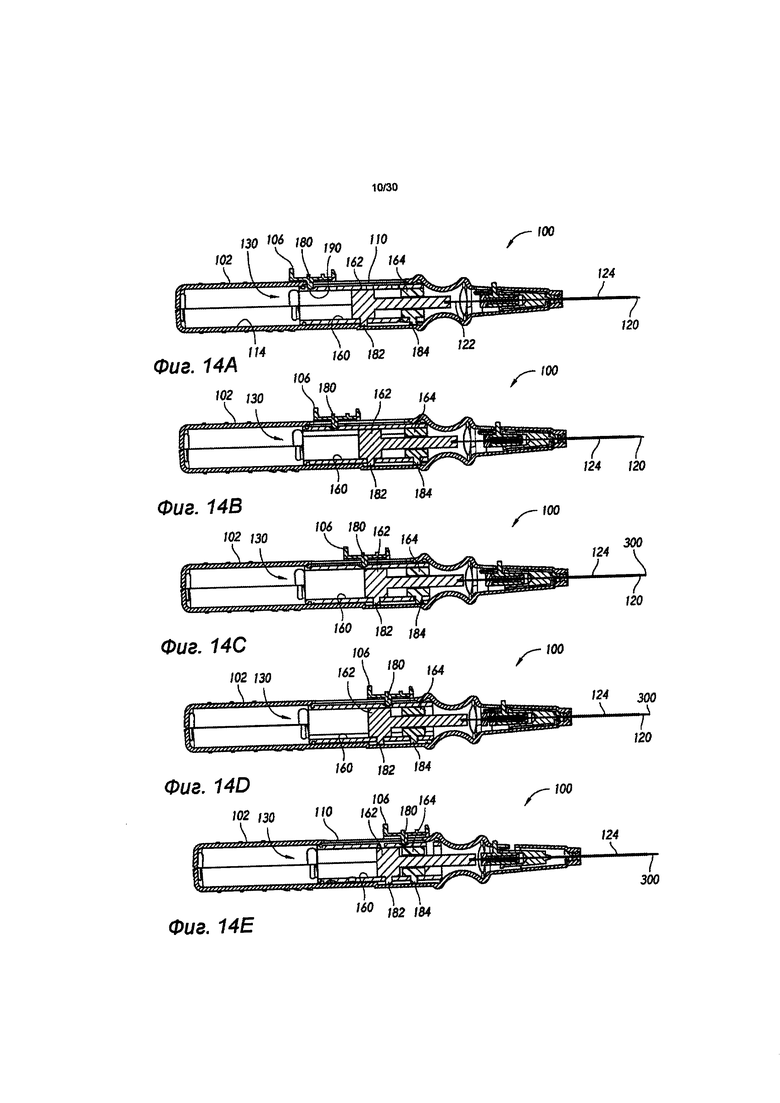
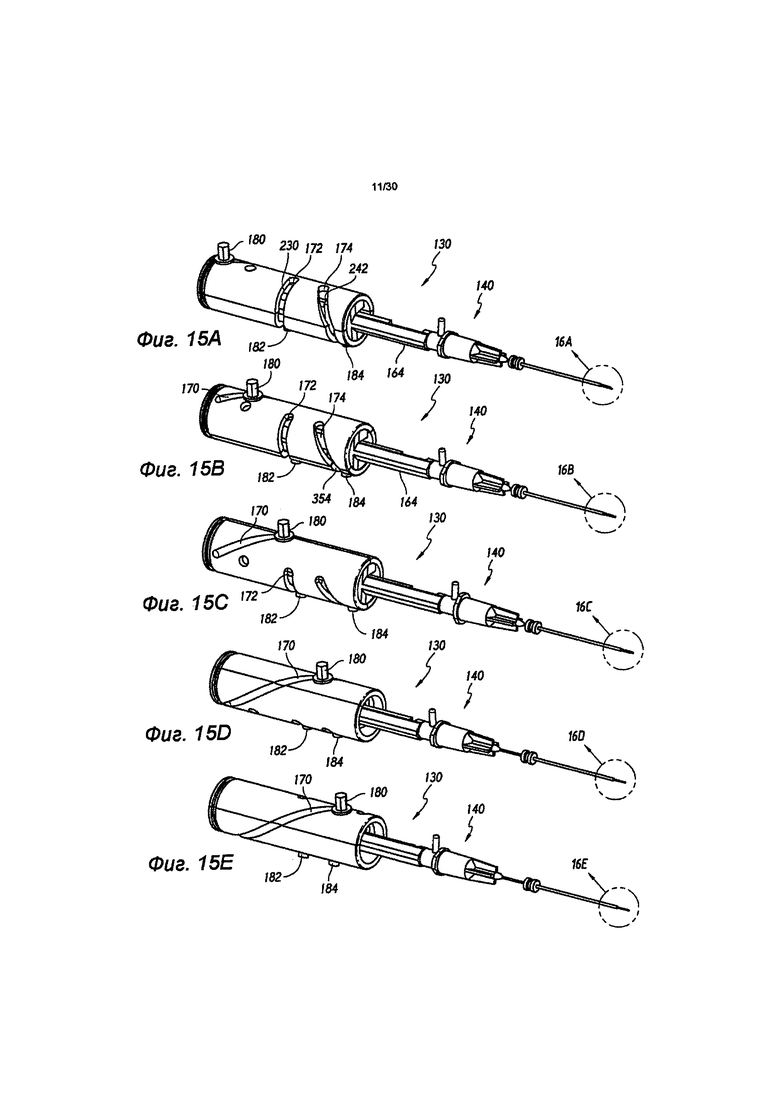
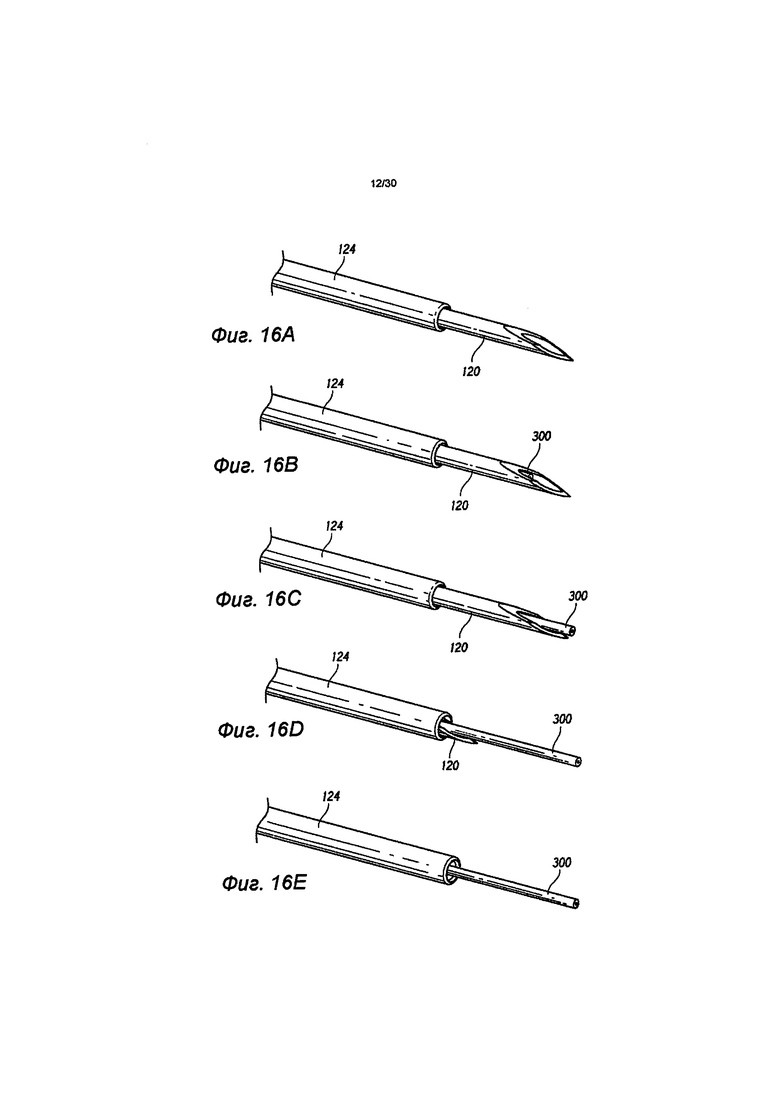
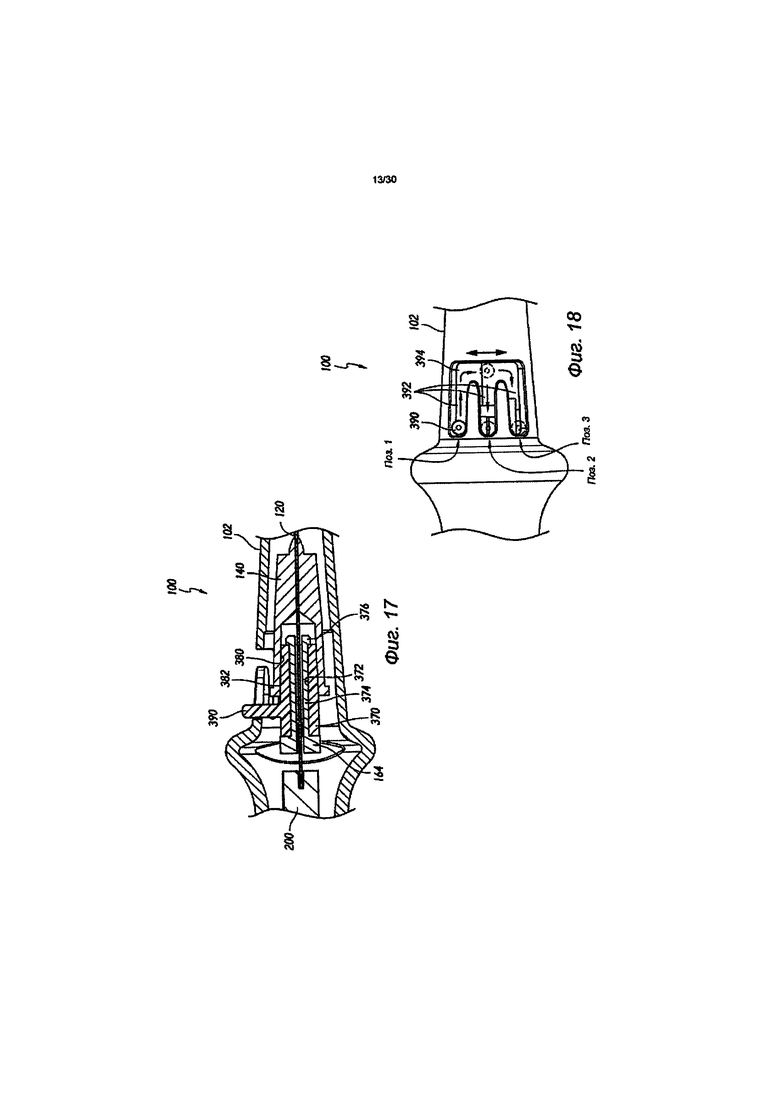
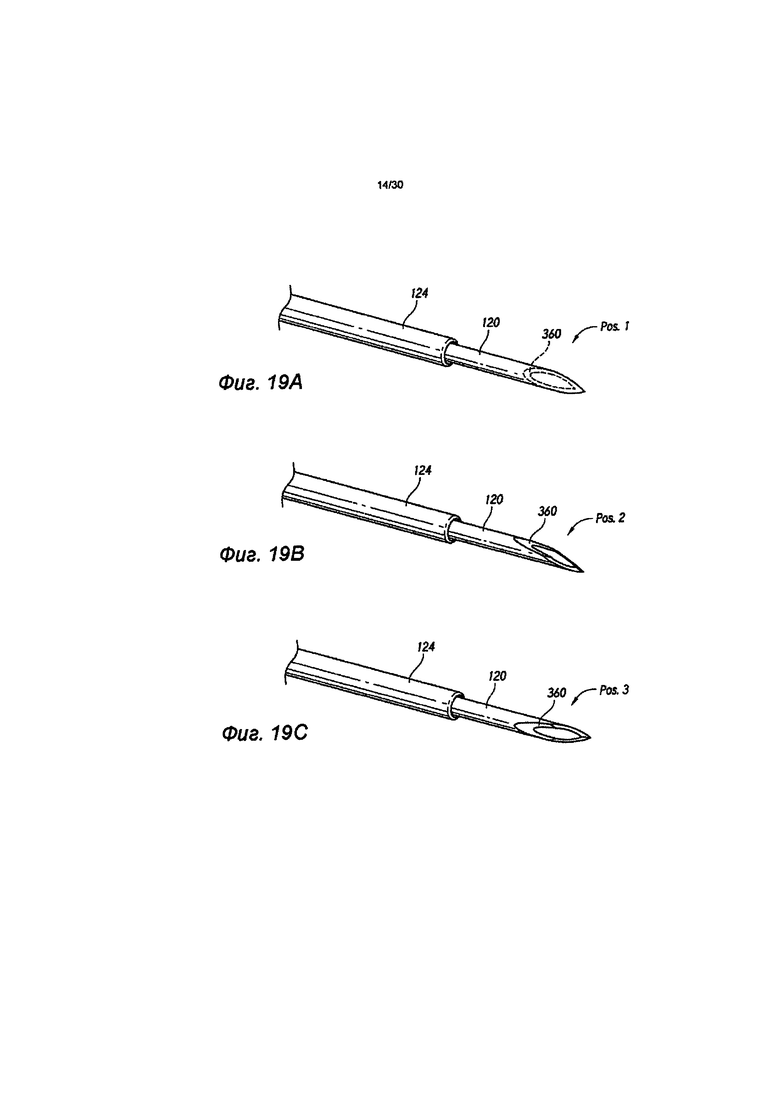
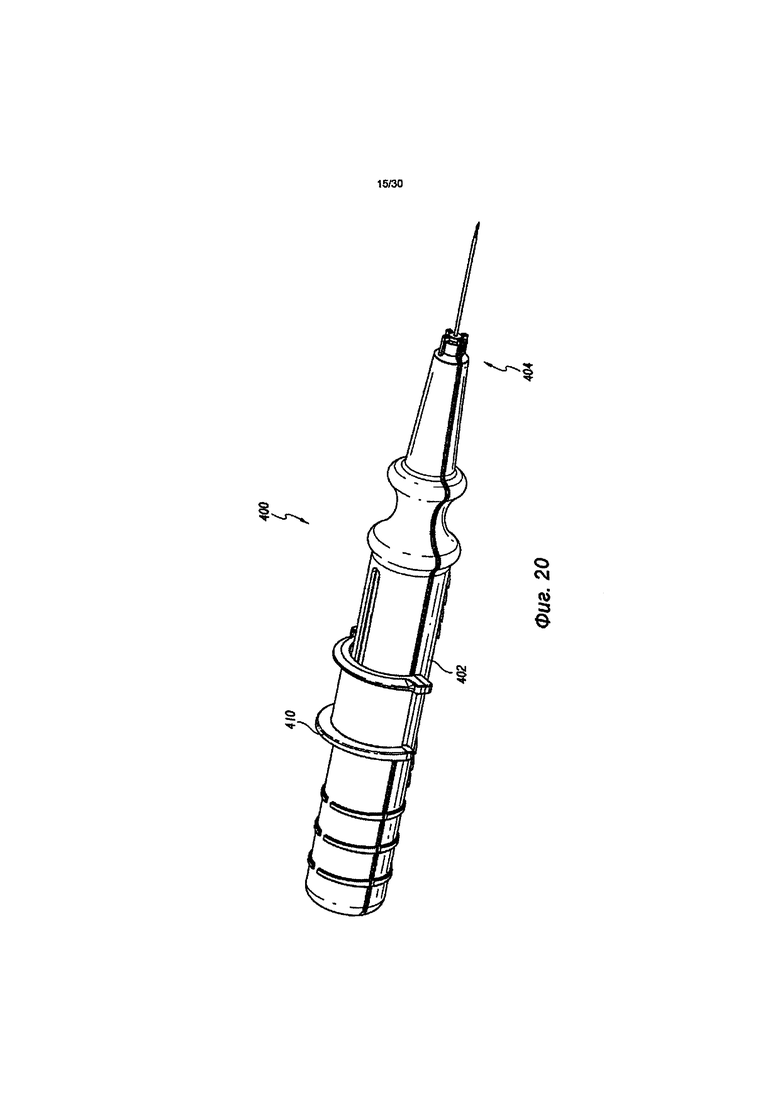
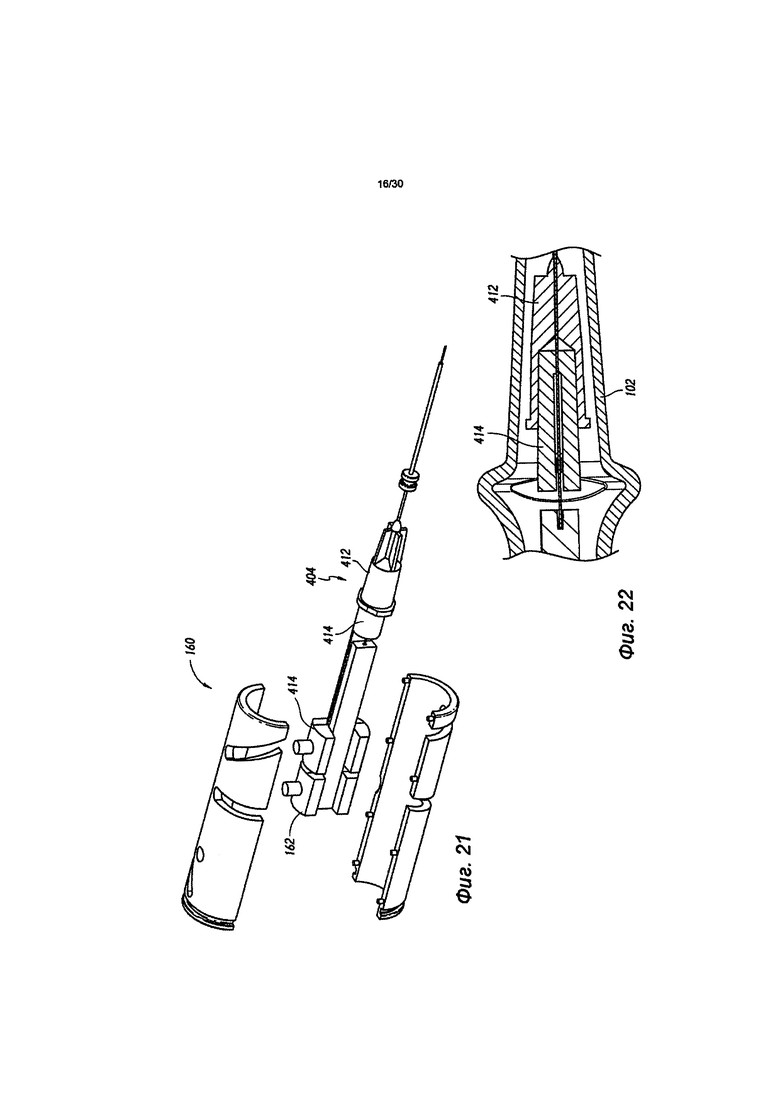
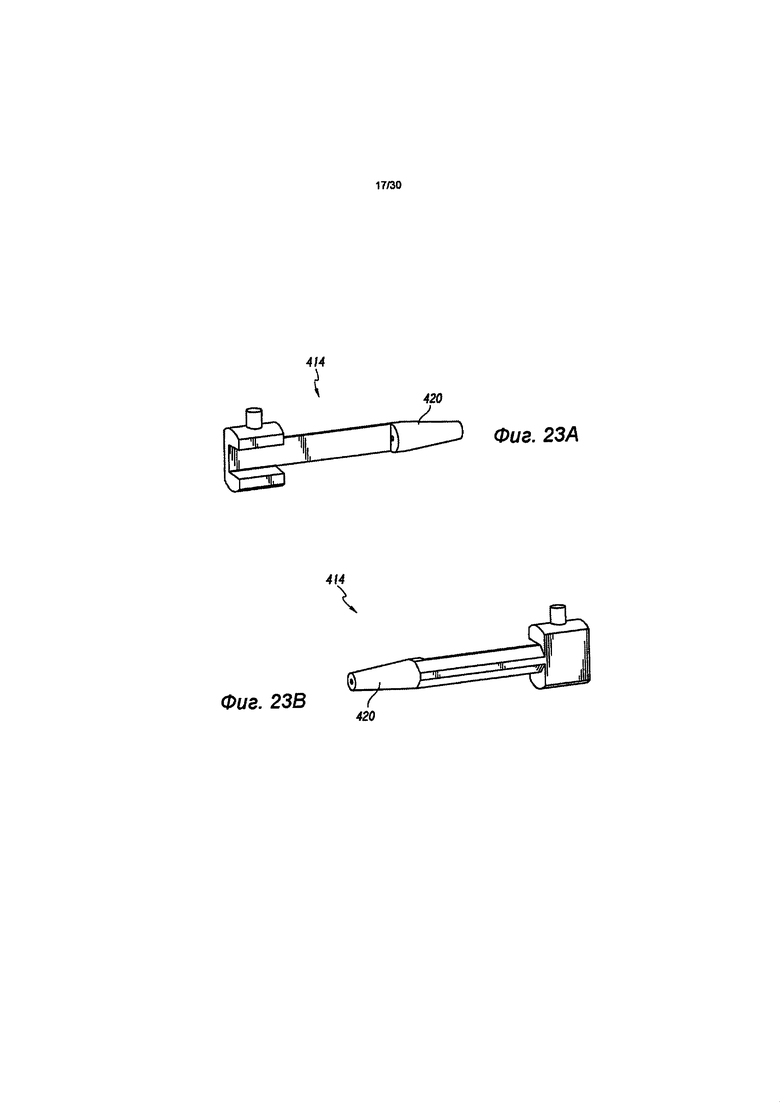

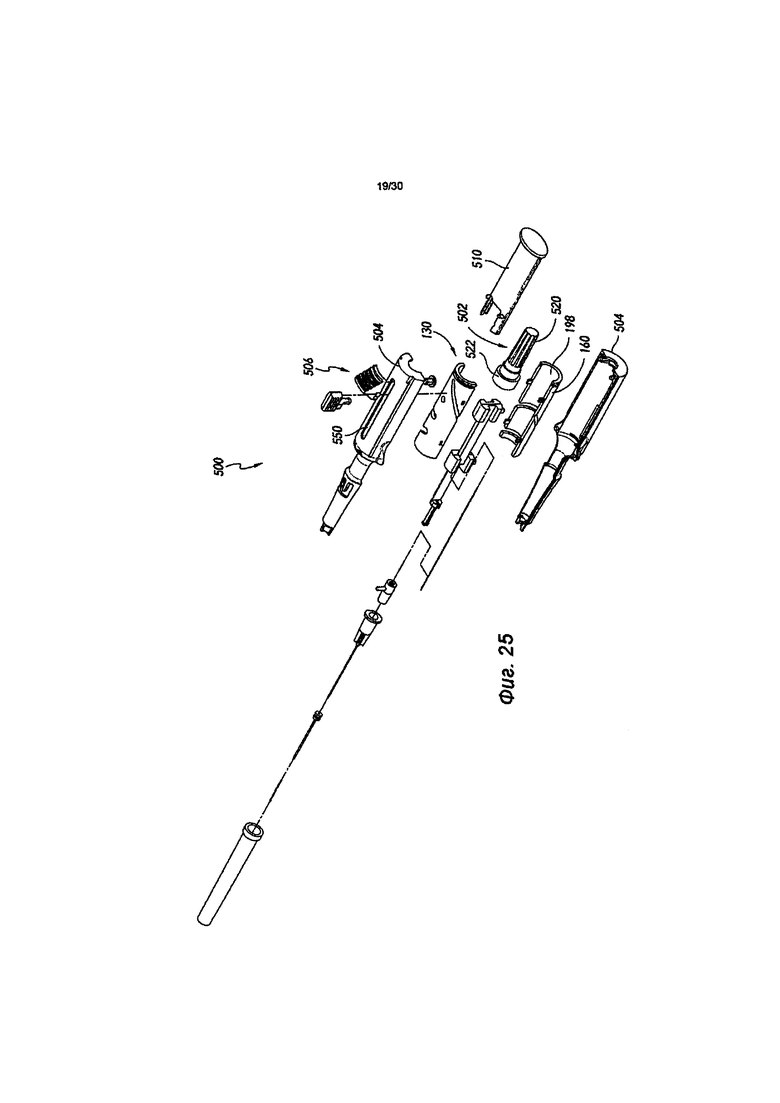
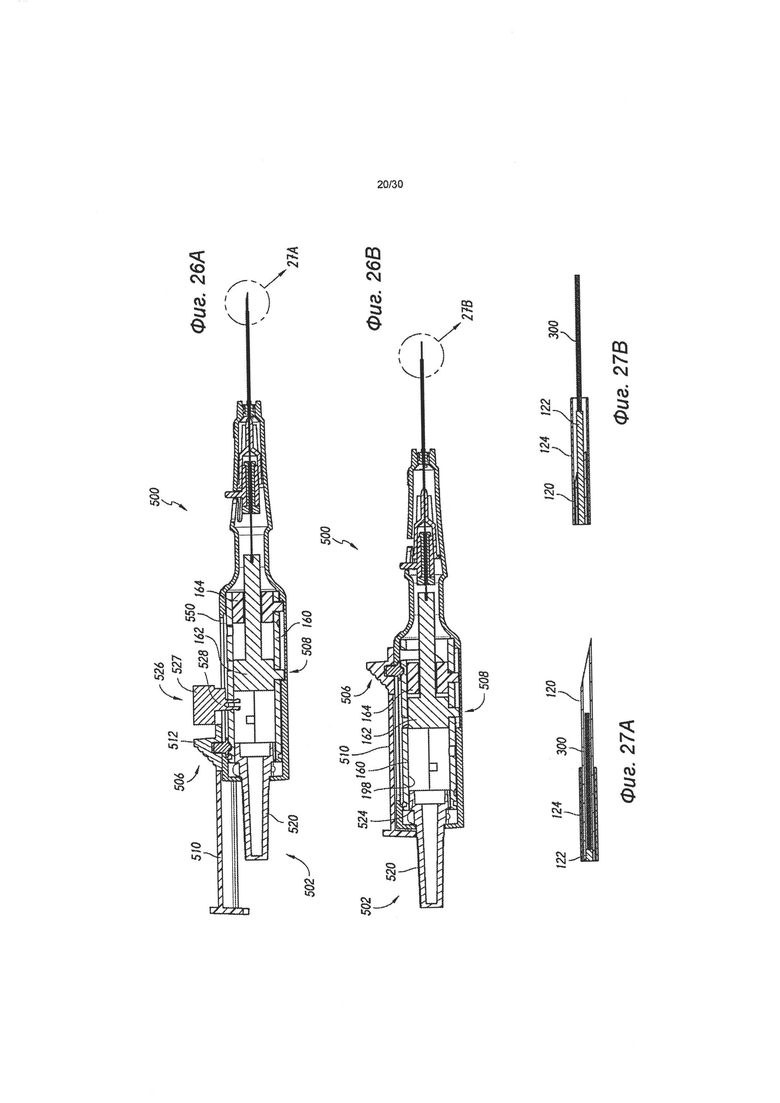
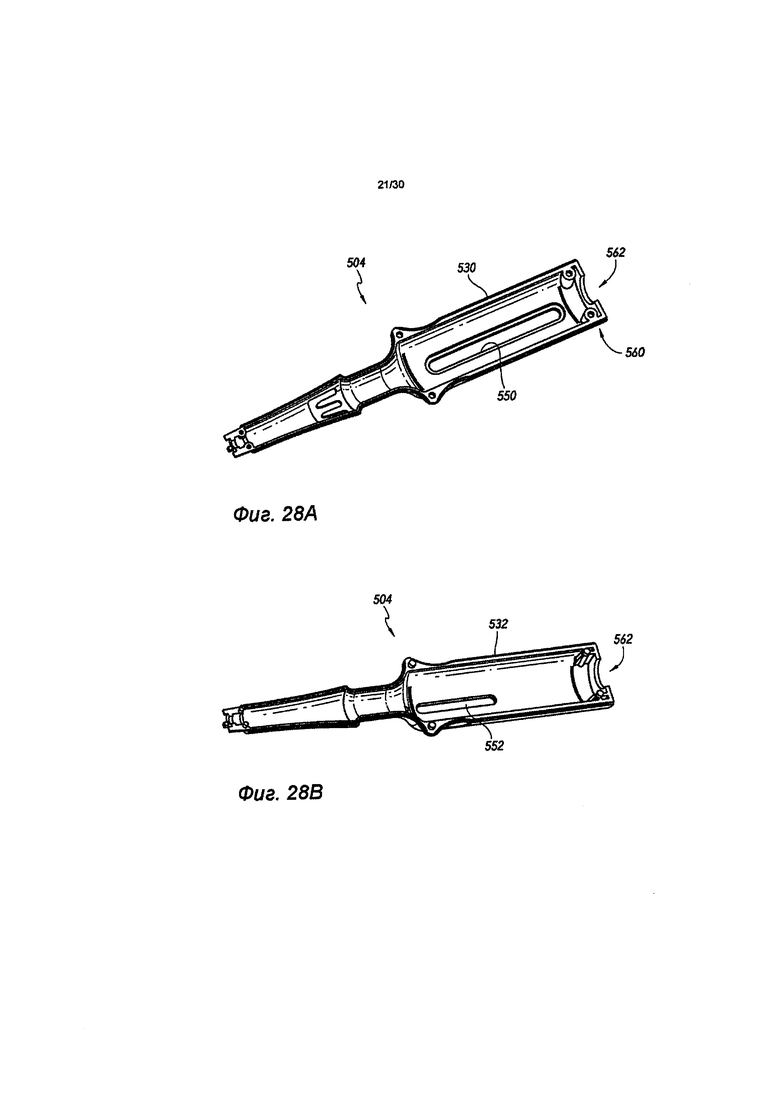
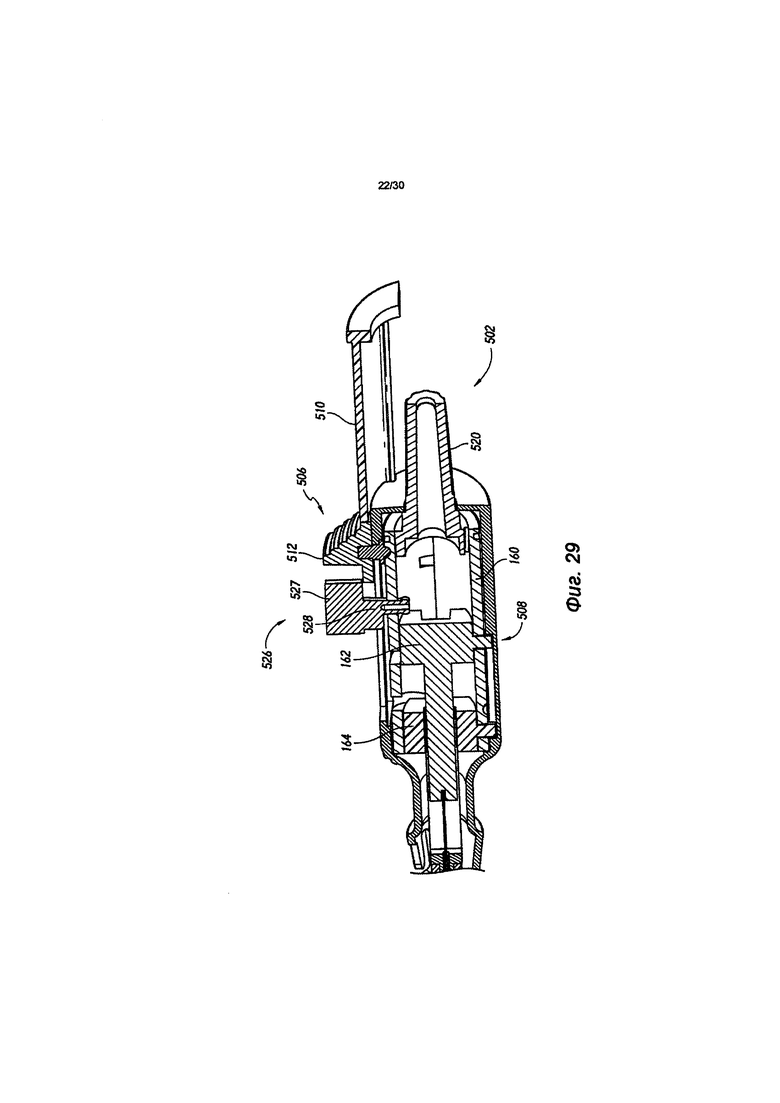
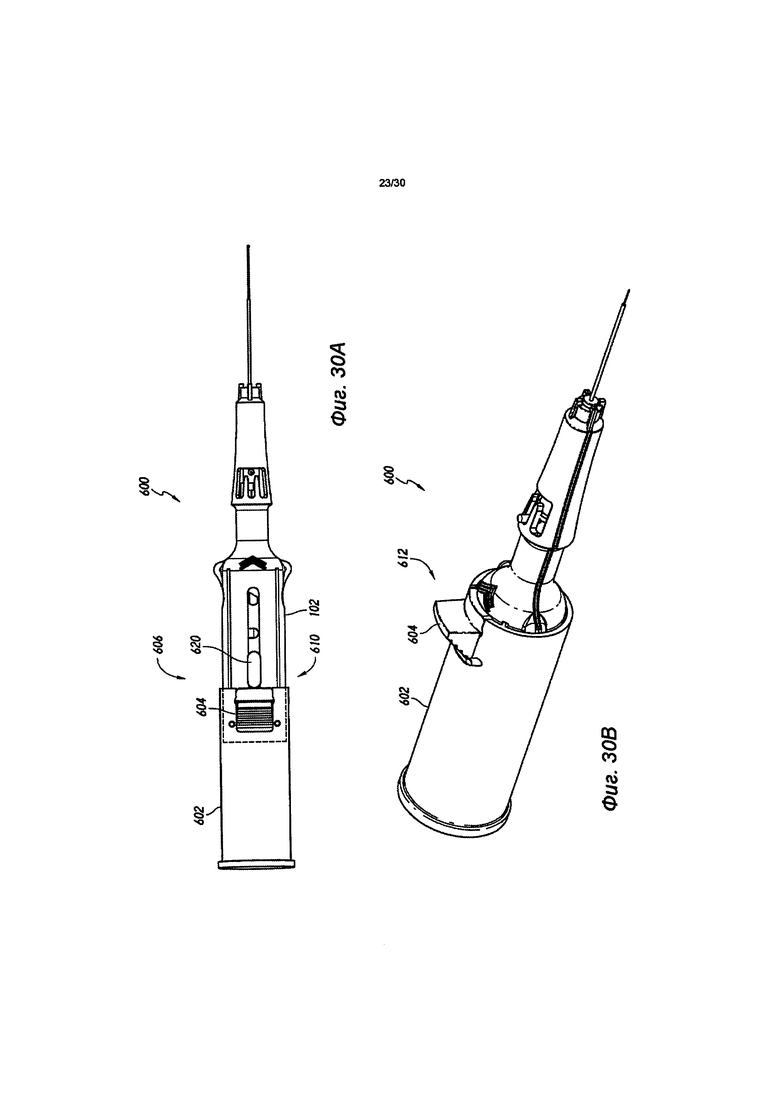
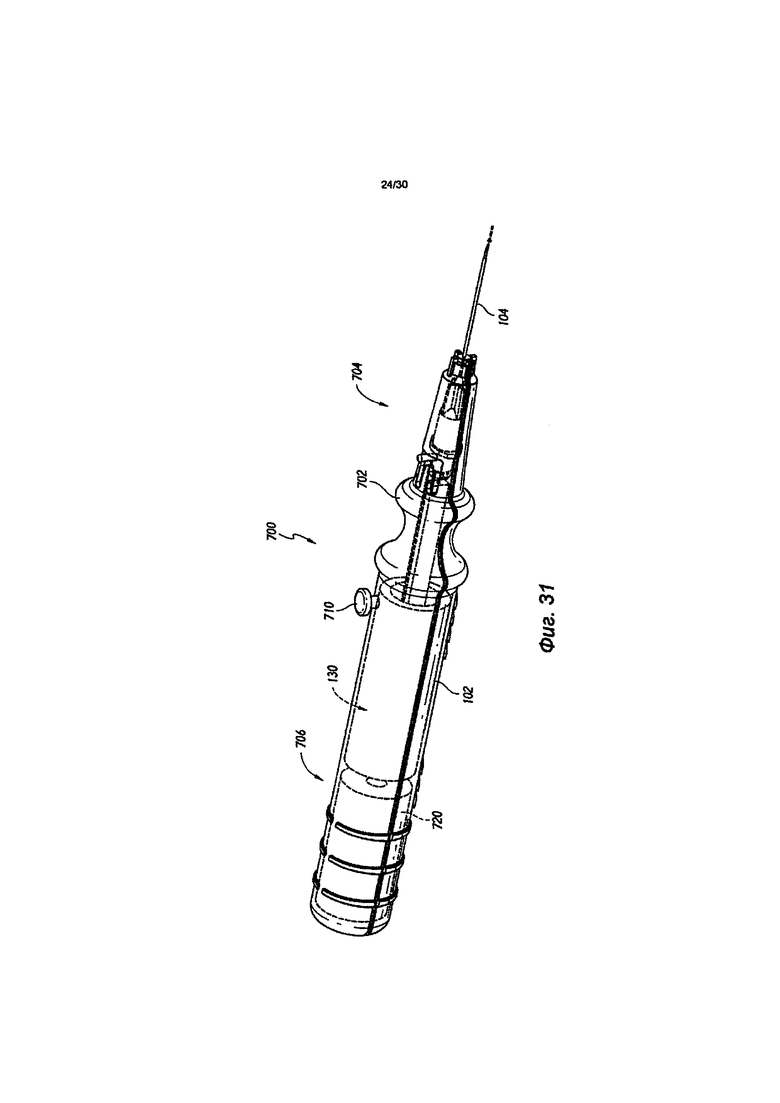
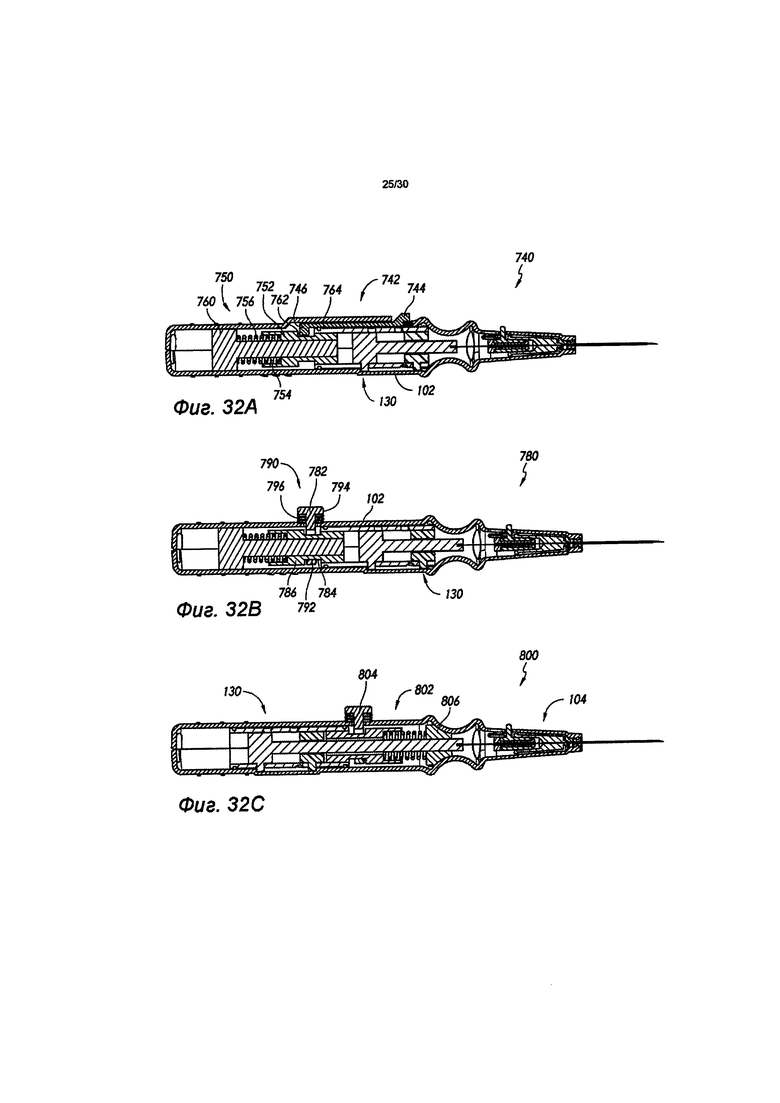
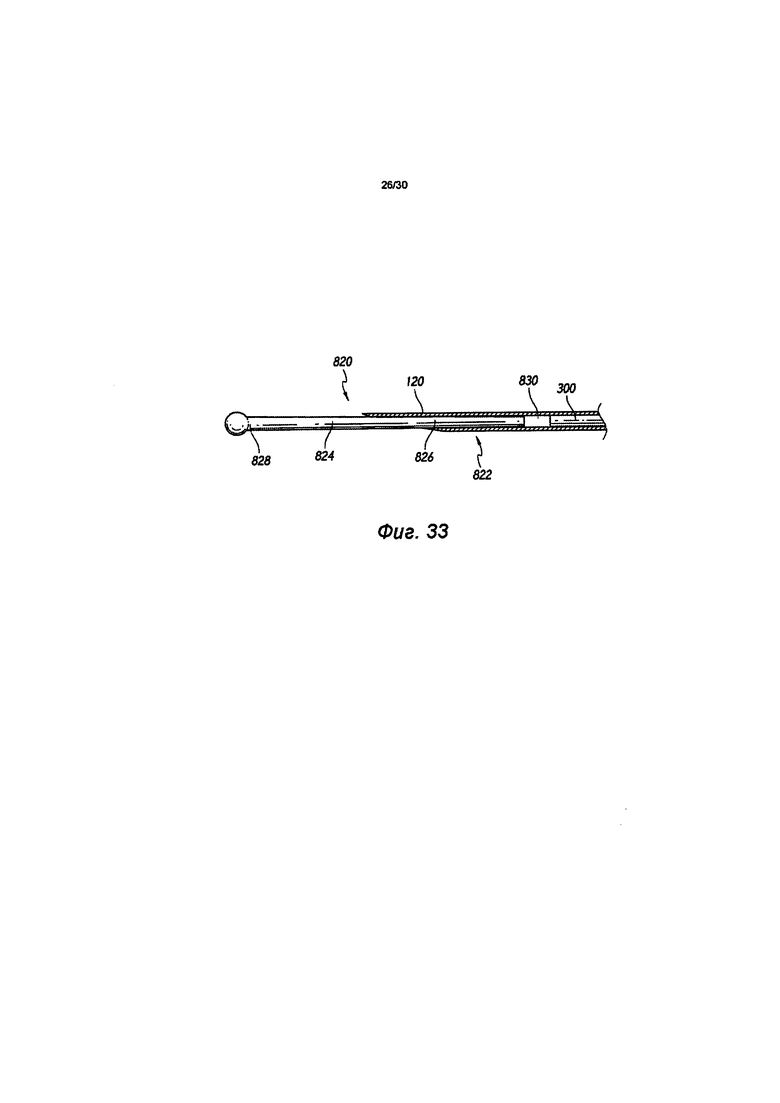
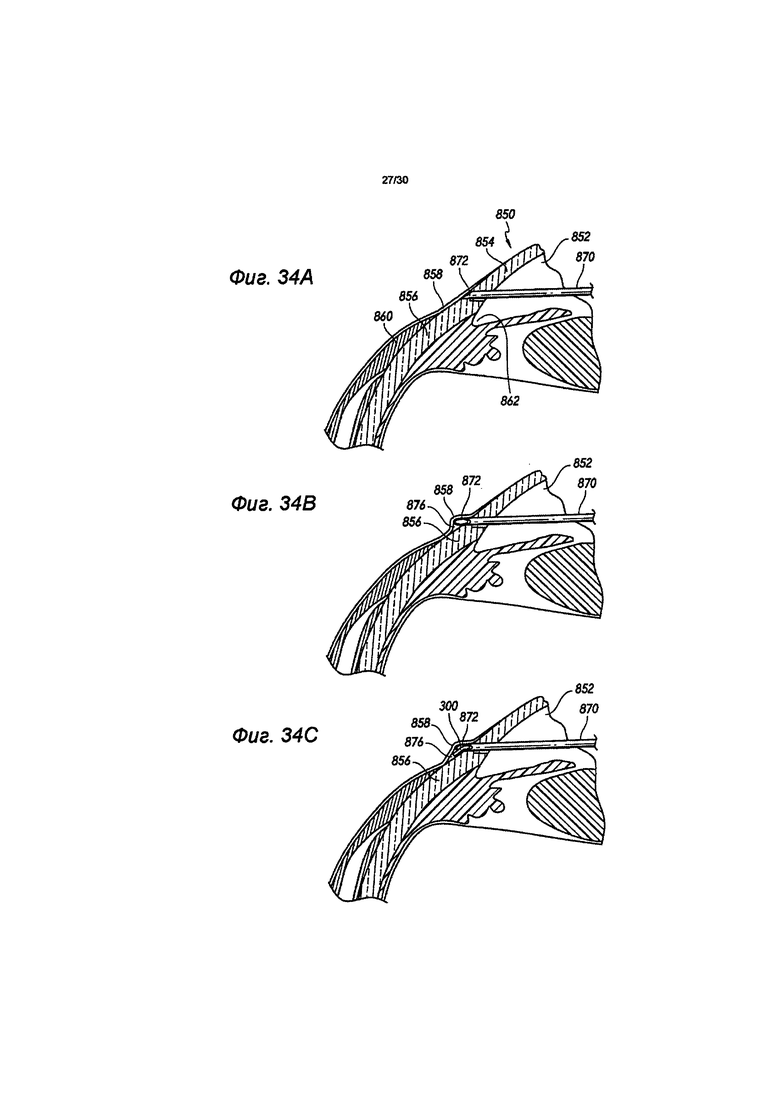
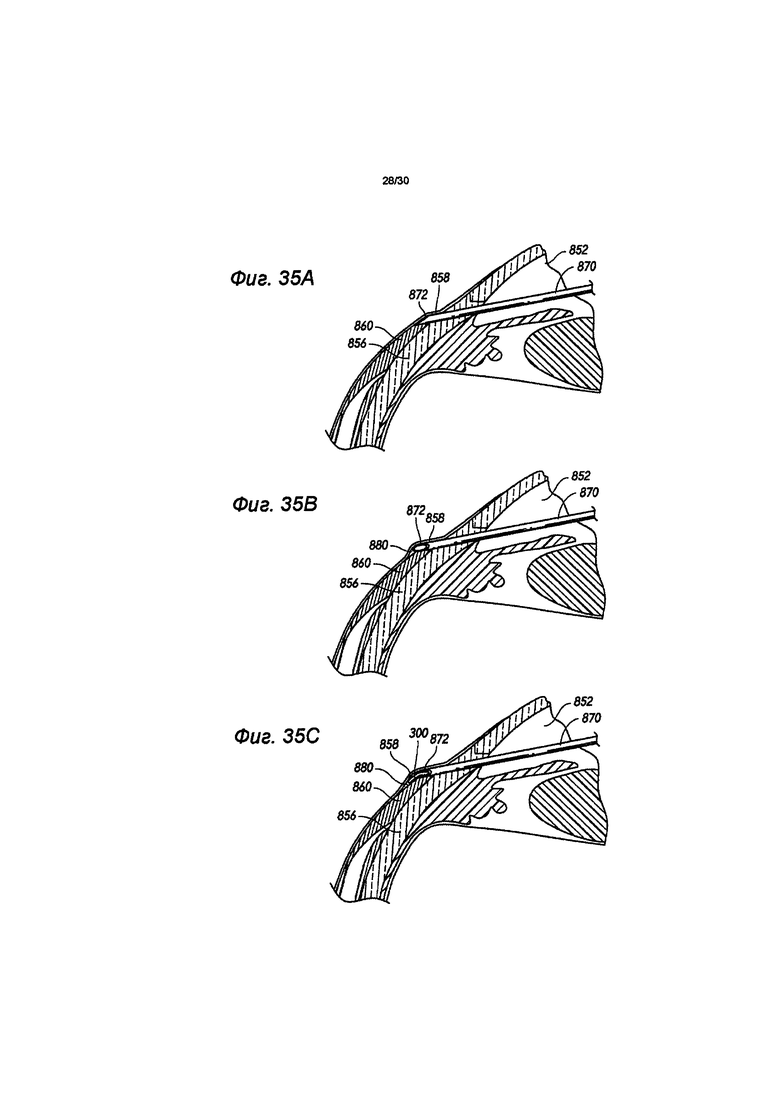
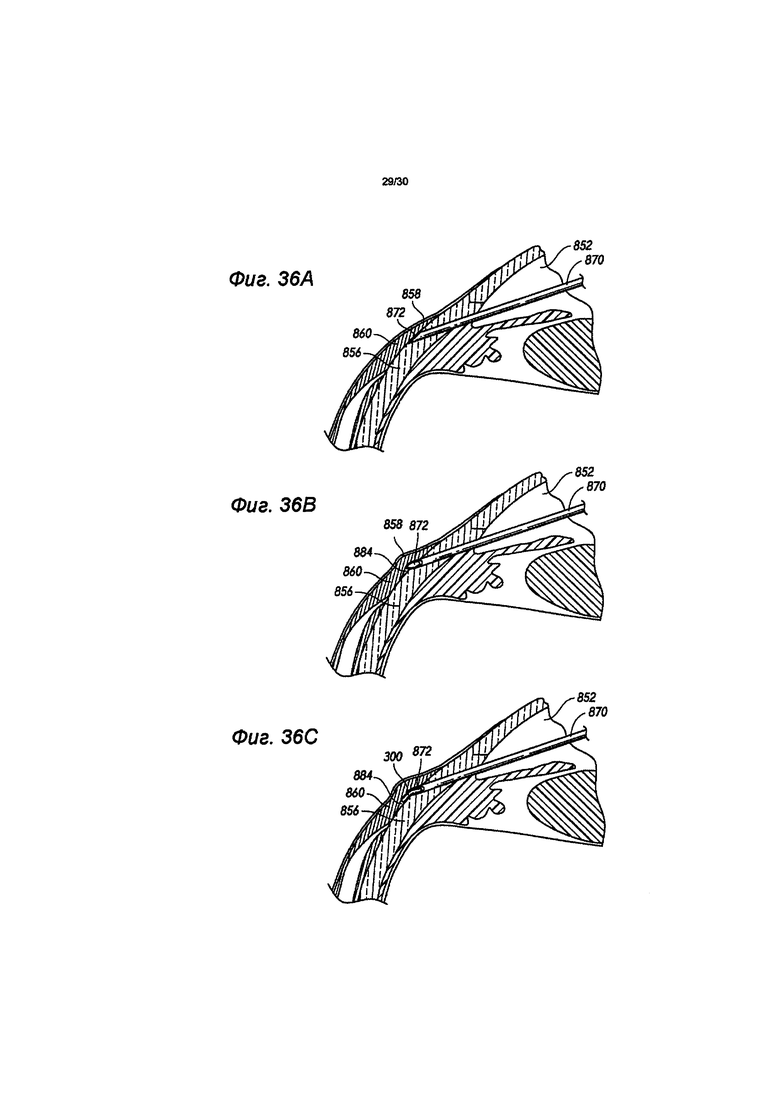
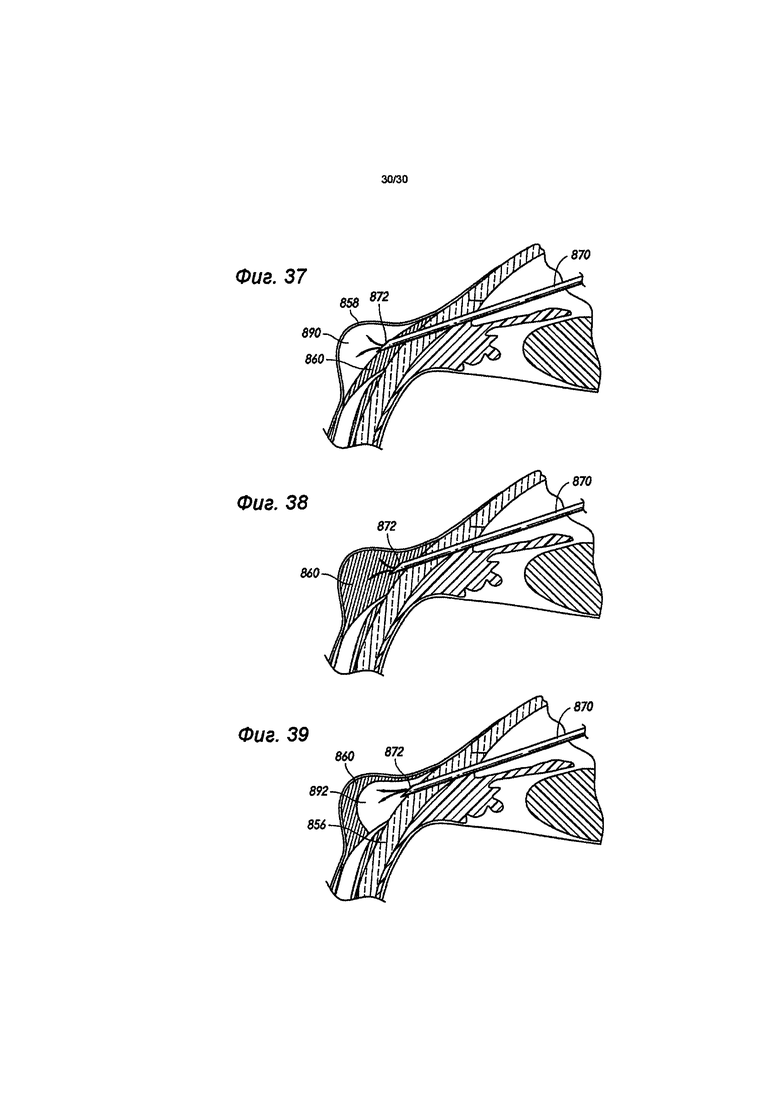
Изобретение относится к устройству введения для лечения глаукомы. Устройство содержит корпус с внутренней полостью и пазом для скользящего элемента, проходящим от наружной поверхности этого корпуса в указанную полость; иглу с просветом; плунжер, выполненный с возможностью перемещения внутри указанного просвета; компонент привода, содержащий цилиндрический элемент, соединенный с иглой посредством паза для иглы и плунжером посредством паза для плунжера для обеспечения их перемещения вдоль продольной оси устройства при вращении этого компонента, при этом компонент привода дополнительно включает в себя паз для скользящего элемента, продольно перекрывающий паз для иглы и паз для плунжера; и скользящий элемент, соединенный с корпусом и выполненный с возможностью скольжения вдоль него, при этом скользящий элемент соединен с компонентом привода посредством паза для скользящего элемента так, что перемещение скользящего элемента вдоль оси обеспечивает поворот компонента привода внутри корпуса и перемещение иглы и плунжера вдоль указанной оси. 2 н. и 16 з.п. ф-лы, 39 ил.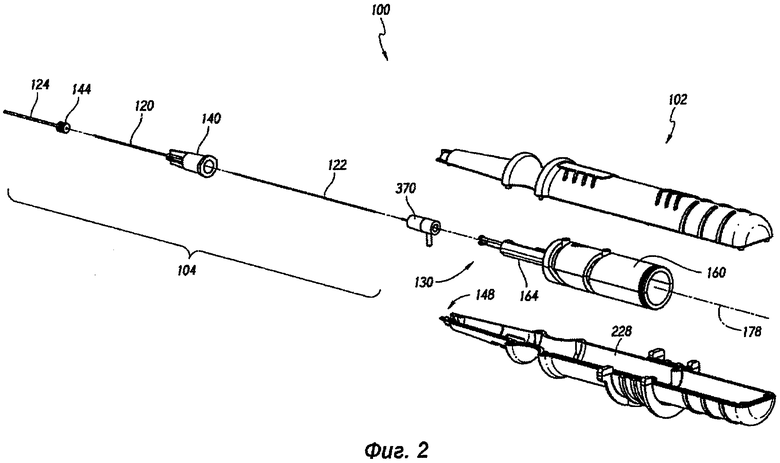
1. Устройство введения для лечения глаукомы, содержащее:
корпус с внутренней полостью и пазом для скользящего элемента, проходящим от наружной поверхности этого корпуса в указанную полость;
иглу с просветом;
плунжер, выполненный с возможностью перемещения внутри указанного просвета;
компонент привода, содержащий цилиндрический элемент, соединенный с иглой посредством паза для иглы и плунжером посредством паза для плунжера для обеспечения их перемещения вдоль продольной оси устройства при вращении этого компонента, при этом компонент привода дополнительно включает в себя паз для скользящего элемента, продольно перекрывающий паз для иглы и паз для плунжера; и
скользящий элемент, соединенный с корпусом и выполненный с возможностью скольжения вдоль него, при этом скользящий элемент соединен с компонентом привода посредством паза для скользящего элемента так, что перемещение скользящего элемента вдоль оси обеспечивает поворот компонента привода внутри корпуса и перемещение иглы и плунжера вдоль указанной оси.
2. Устройство по п. 1, в котором цилиндрический элемент является полым.
3. Устройство по п. 1, в котором в компоненте привода паз для скользящего элемента приспособлен для зацепления со скользящим элементом, так что при перемещении скользящего элемента указанное зацепление обеспечивает поворот этого компонента привода.
4. Устройство по п. 1, в котором в компоненте привода паз для плунжера приспособлен для зацепления с плунжером при повороте указанного компонента привода, при этом указанное зацепление обеспечивает перемещение плунжера вдоль оси в ответ на поворот компонента привода.
5. Устройство по п. 1, в котором в компоненте привода паз для иглы приспособлен для зацепления с иглой при повороте этого компонента привода, при этом указанное зацепление обеспечивает перемещение иглы вдоль оси в ответ на поворот компонента привода.
6. Устройство по п. 1, в котором компонент привода удерживается внутри полости корпуса.
7. Устройство по п. 6, дополнительно содержащее стопор для зацепления с наружным элементом конструкции корпуса и ограничения перемещения скользящего элемента внутри паза корпуса.
8. Устройство по п. 6, дополнительно содержащее головку, соединенную с проксимальным концом корпуса и с компонентом привода, причем головка соединена с компонентом привода с возможностью совместного вращения, так что поворот указанной головки обеспечивает поворот компонента привода.
9. Устройство по п. 1, в котором игла присоединена к поворотному регулировочному элементу, соединенному с приводом иглы и выполненному с возможностью поворота относительно этого привода иглы, так что при повороте регулировочного элемента изменяется угловое положение иглы относительно корпуса, при этом регулировочный элемент выполнен с возможностью поворота и фиксации углового положения иглы относительно указанного корпуса.
10. Устройство по п. 1, в котором первый конец паза для скользящего элемента расположен на компоненте привода в самом дальнем положении относительно паза для иглы и паза для плунжера.
11. Устройство привода по п. 10, в котором второй конец паза для скользящего элемента расположен между первым концом паза для иглы и первым концом паза для плунжера.
12. Устройство по п. 1, в котором паз для скользящего элемента проходит вдоль компонента привода, совершая половину оборота вокруг этого компонента.
13. Устройство по п. 1, в котором паз для плунжера проходит вдоль компонента привода, совершая половину оборота вокруг этого компонента.
14. Устройство по п. 1, в котором паз для иглы проходит вдоль компонента привода, совершая половину оборота вокруг этого компонента.
15. Компонент привода для приведения в действие устройства введения для лечения глаукомы по любому из пп. 1–14, содержащий цилиндрический корпус с проходящими вдоль него первой, второй и третьей продолговатыми направляющими, при этом первая продолговатая направляющая проходит по винтовой спирали от проксимальной части корпуса к дистальной его части, вторая продолговатая направляющая содержит первую часть, проходящую по винтовой спирали вокруг этого корпуса, и вторую часть, проходящую по окружности вокруг этого корпуса, а третья продолговатая направляющая содержит первую часть, проходящую по окружности вокруг этого корпуса, и вторую часть, проходящую по винтовой спирали вокруг этого корпуса.
16. Компонент привода по п. 15, в котором вторая часть второй продолговатой направляющей проходит в плоскости, перпендикулярной продольной оси корпуса, а первая часть первой продолговатой направляющей проходит в плоскости, по существу перпендикулярной продольной оси корпуса.
17. Компонент привода по п. 15, в котором первая часть второй продолговатой направляющей проходит по винтовой спирали от второй части этой второй продолговатой направляющей к проксимальному концу корпуса, а вторая часть третьей продолговатой направляющей проходит по винтовой спирали от первой части этой третьей продолговатой направляющей к проксимальному концу корпуса.
18. Компонент привода по п. 15, в котором цилиндрический корпус состоит из двух разборных и соединенных между собой продолговатых частей, при этом по меньшей мере одна из первой, второй или третьей направляющих проходит вдоль обеих указанных частей.
| US 2012123317 A1, 17.05.2012 | |||
| US 6228023 B1, 08.05.2001 | |||
| US 2004215133 A1, 28.10.2004 | |||
| СПОСОБ ОПЕРАТИВНОГО ЛЕЧЕНИЯ КАТАРАКТЫ В СОЧЕТАНИИ С ГЛАУКОМОЙ И ИНСТРУМЕНТ ДЛЯ ВЫПОЛНЕНИЯ СПОСОБА | 2005 |
|
RU2313315C2 |

