Изобретение относится к способам измерения углового положения фронта ионосферных волн и может быть использовано в радиопеленгаторах-дальномерах импульсных излучателей электромагнитных волн для определения их координат (например, координат молниевых излучателей).
Известен способ безошибочного пеленгования поляризованных электромагнитных волн [Patentscrift №2600043 BRD, Int. cl2 G01S 3/08. Anordnung zur polarisationsfelerfreien Palung elliptish polarisierter elektromagnetischer Wellen Zanscher H., Gabier Н]. Он предполагает прием сигналов двух ортогональных компонент волны Hx(t), Hy(t) с помощью взаимно ортогональных вертикальных рамочных антенн и сигналов вертикальных магнитной Hz(t) и электрической Ez(t) компонент, снимаемых с дополнительных горизонтальной рамочной и вертикальной штыревой антенн.
Однако указанный аналог обеспечивает безошибочное измерение положения фронта эллиптически поляризованных волн только в момент времени, когда сигнал компоненты с одной из вспомогательных антенн равен нулю. Выделение этого момента времени сопровождается ошибками, что приведет к ошибкам в измерении углового положения фронта ионосферной волны и пеленговании излучателя. Кроме того, аналог работоспособен лишь при приеме компонент поля вне поверхности Земли, например на летательных аппаратах. Наземный прием приводит в этом способе к интерференции падающей на Землю и отраженной от нее пространственных волн и к недопустимым ошибкам пеленгования.
Другой аналог предполагает прием сигналов шести ортогональных компонент: магнитных Hx(t), Hy(t), Hz(t) и электрических Ex(t), Ey(t), Ez(t), снимаемых с взаимно ортогональных соответственно трех рамочных и трех штыревых антенн [Patentscrift №1798346 BRD, Int. cl2 G01S 3/04. Verfahren und Peilaulage zur Erm ittlung der Eenfallsrichtung elektromagnetischer Wellen/Zauscher Н]. Этот аналог позволяет измерять положение фронта ионосферной волны в течение всего времени ее действия. Однако остается недостаток, заключающийся в его неприменимости для наземных пеленгаторов.
Наиболее близким к заявляемому способу является способ измерения положения фронта ионосферной волны [Тсюрюда К., Хаяши К. Техника радиопеленгования для эллиптически поляризованных ОНЧ электромагнитных волн и ее применение для низкочастотных свистящих атмосфериков // J. Atmos. and Terr. Phys., 1975, pp. 1193-1202].
Он предполагает:
- узкополосное выделение сигналов вертикальной электрической  компоненты и двух взаимно ортогональных горизонтальных магнитных компонент
компоненты и двух взаимно ортогональных горизонтальных магнитных компонент  ;
;
- сдвиг этих сигналов по фазе на угол π/2, что формирует три сдвинутых по фазе сигнала  ;
;
- формирование из них сигналов nx, ny согласно выражениям
где Z0 - волновой импеданс среды.
Сигналы nx, ny оказываются пропорциональными произведениям тригонометрических функций углов, определяющих положение фронта ионосферной волны

где α - пеленг на излучатель;
β - угол падения ионосферной волны относительно вертикали.
Прототип позволяет обеспечить безошибочное определение углового положения фронта ионосферной волны, только если она представлена одним лучом. Однако он не применим в случаях, когда поле в точке приема является интерференционным, составленным из лучей, распространяющихся от излучателя различными путями.
Такая ситуация, например, возникает при распространении импульсного электромагнитного излучения от молниевых разрядов или взрывов, распространяющихся в волноводе Земля-ионосфера, как в многолучевом канале. В этом случае ионосферные волны второго и более высокого порядка приводят к ошибкам из-за многолучевости. Определение углового положения первой ионосферной волны сопровождается грубыми ошибками, в конечном итоге снижения точности измерения положения фронта ионосферной волны.
Задачей, решаемой в изобретении, является повышение точности измерения положения фронта ионосферной волны.
Сущность изобретения заключается в том, что в способе измерения положения фронта ионосферной волны, заключающемся в том, что выделяют сигналы вертикальной электрической  компоненты и двух взаимно ортогональных горизонтальных магнитных компонент
компоненты и двух взаимно ортогональных горизонтальных магнитных компонент  , сдвигают эти сигналы по фазе на угол π/2, что формирует три сдвинутых по фазе сигнала
, сдвигают эти сигналы по фазе на угол π/2, что формирует три сдвинутых по фазе сигнала  , формируют из них сигналы nx, ny согласно выражениям
, формируют из них сигналы nx, ny согласно выражениям
где Z0 - волновой импеданс среды,
сигналы nx, ny оказываются пропорциональными произведениям тригонометрических функций углов, определяющих положение фронта ионосферной волны

где α - пеленг на излучатель;
β - угол падения ионосферной волны относительно вертикали,
сдвигают на время τ сигналы вертикальной электрической  компоненты и двух взаимно ортогональных горизонтальных магнитных компонент
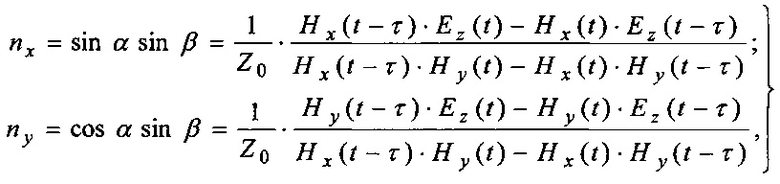
компоненты и двух взаимно ортогональных горизонтальных магнитных компонент  , формируя сдвинутые сигналы Ez(t-τ), Hx(t-τ), Hy(t-τ), и измеряют положение фронта ионосферной волны по формулам
, формируя сдвинутые сигналы Ez(t-τ), Hx(t-τ), Hy(t-τ), и измеряют положение фронта ионосферной волны по формулам
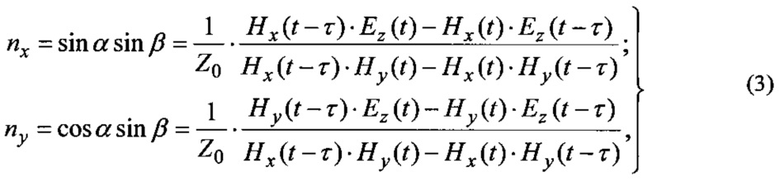
где α - пеленг на излучатель;
β - угол падения ионосферной волны
относительно вертикали;
Z0 - волновой импеданс среды.
Пеленг на излучатель и угол падения волны в вертикальной плоскости определятся из (3) по зависимостям
Величину задержки τ следует выбирать равной 10-20% от длительности ионосферной волны.
Заявленный способ может быть легко реализован. Выделение сигнала, пропорционального вертикальной электрической компоненте осуществимо с помощью вертикального несимметричного вибратора. Выделение сигналов, пропорциональных горизонтальным магнитным компонентам Hx(t), Hy(t), может быть осуществлено с помощью двух взаимно ортогональных вертикальных рамочных антенн. Все устройства для реализации заявленной последовательности операций над сигналами являются известными.
Возможный вариант структурной схемы устройства, реализующего заявляемый способ, приведен на фиг. 1. На схеме обозначены: WE, WH вертикальные несимметричный вибратор и взаимно ортогональные рамочные антенны соответственно; 1 - усилители сигналов принимаемых компонент; 2 - линии задержки; 3 - перемножители сигналов; 4 - устройства вычитания; 5 - делители сигналов.
С помощью антенн WE, WH компоненты Ez(t), Hx(t), Hy(t) электромагнитного поля преобразуются в электрические сигналы, усиливаемые усилителями 1. Эти сигналы, пройдя через линии задержки на величину τ, преобразуются в задержанные сигналы Εz(t-τ), Ηx(t-τ), Hy(t-τ). В перемножителях 3 формируются шесть сигналов парных произведений Hx(t-τ)⋅Ez(t), Hx(t)⋅Ez(t-τ), Hy(t-τ)⋅Ez(t), Hy(t)⋅Εz(t-τ), Hx(t-τ)⋅Hy(t), Hx(t)⋅Hy(t-τ). С помощью устройств вычитания 4 формируются разностные сигналы Нх(t-τ)⋅Ez(t)-Нх(t)⋅Εz(t-τ), Hy(t-τ)⋅Εz(t)-Hy(t)⋅Ez(t-τ), Hx(t-τ)⋅Hy(t)-Hx(t)⋅Hy(t-τ).
В делителях 5 определяются сигналы отношений, пропорциональные измеряемым величинам nx, ny.
Основным достоинством заявляемого способа является высокая точность определения углового положения фронта ионосферной волны из-за отсутствия ошибок из-за многолучевости. Она достигается в результате раздельного приема отдельных ионосферных волн со сдвигом на время приема τ сигналов, обеспечивая широкополосный прием и исключения ошибкок из-за многолучевости, неизбежные при узкополосном приеме. Предлагаемый способ найдет применение для определения местоположения молниевых разрядов и других источников импульсного электромагнитного излучения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2018 |
|
RU2702102C1 |
| ОДНОПУНКТОВЫЙ СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 1993 |
|
RU2054690C1 |
| ОДНОПУНКТОВАЯ СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ ГРОЗ В БЛИЖНЕЙ ЗОНЕ | 2002 |
|
RU2230336C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2713866C1 |
| ОДНОПУНКТОВАЯ СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ ГРОЗ В БЛИЖНЕЙ ЗОНЕ | 2015 |
|
RU2599775C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ МОЛНИЕВЫХ РАЗРЯДОВ | 1999 |
|
RU2152054C1 |
| СПОСОБ ОДНОПУНКТОВОЙ ДАЛЬНОМЕТРИИ ИСТОЧНИКОВ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 1996 |
|
RU2118836C1 |
| СПОСОБ ОДНОПУНКТОВОГО МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА АТМОСФЕРИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2090903C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2023 |
|
RU2827103C1 |
| СПОСОБ ПЕЛЕНГАЦИИ УЗКОПОЛОСНЫХ РАДИОСИГНАЛОВ КВ ДИАПАЗОНА | 2009 |
|
RU2407026C1 |
Изобретение относится к области радиопеленгования импульсных радиоизлучателей электромагнитной энергии (например, молниевых разрядов) в приземном волноводе Земля - ионосфера. Достигаемый технический результат - повышение точности измерения положения фронта ионосферной волны. Указанный результат достигается за счет осуществления широкополосного приема ортогональных компонент электромагнитного поля, что позволяет регистрировать ионосферные волны в точке приема раздельно и безошибочно определять угловое положение фронта падения каждой из них, за счет устранения ошибок многолучевости, вызванных интерференцией многократно отраженных от ионосферы электромагнитных волн. 1 ил.
Способ измерения положения фронта волны, заключающийся в том, что выделяют сигналы вертикальной электрической  компоненты и двух взаимно ортогональных горизонтальных магнитных компонент
компоненты и двух взаимно ортогональных горизонтальных магнитных компонент  , сдвигают эти сигналы по фазе на угол π/2, формируя три сдвинутых по фазе сигнала
, сдвигают эти сигналы по фазе на угол π/2, формируя три сдвинутых по фазе сигнала  , формируют из них сигналы nх, ny согласно выражениям
, формируют из них сигналы nх, ny согласно выражениям
где Z0 - волновой импеданс среды,
сигналы nx, ny оказываются пропорциональными произведениям тригонометрических функций углов, определяющих положение фронта ионосферной волны

где α - пеленг на излучатель;
β - угол падения ионосферной волны относительно вертикали,
отличающийся тем, что сдвигают на время τ сигналы вертикальной электрической  компоненты и двух взаимно ортогональных горизонтальных магнитных компонент
компоненты и двух взаимно ортогональных горизонтальных магнитных компонент  , формируя сдвинутые сигналы Ez(t-τ), Hx(t-τ), Hy(t-τ), и измеряют положение фронта ионосферной волны по формулам
, формируя сдвинутые сигналы Ez(t-τ), Hx(t-τ), Hy(t-τ), и измеряют положение фронта ионосферной волны по формулам
где α - пеленг на излучатель;
β - угол падения ионосферной волны относительно вертикали;
Z0 - волновой импеданс среды.
| RU 2002133766 A, 10.07.2004 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2008 |
|
RU2379709C1 |
| СПОСОБ ПЕЛЕНГАЦИИ С УЧЕТОМ КОРРЕЛЯЦИОННОЙ ВЗАИМОСВЯЗИ МЕЖДУ ЛУЧАМИ | 2005 |
|
RU2305294C2 |
| JP 2013186127 A, 19.09.2013 | |||
| Устройство для контроля деталей с прерывистыми поверхностями | 1975 |
|
SU622639A1 |
| US 4761650 A, 02.08.1988 | |||
| US 6061013 A, 09.05.2000. | |||

