Изобретение относится к радиотеплолокации, а именно к радиотеплолокационным (пассивным) системам наблюдения за объектами с помощью сканирующего радиометра [1] в условиях повышенного шага сканирования антенны радиометра с целью увеличения быстродействия.
Радиометр обычно содержит одну антенну, принимающую радиоизлучение объектов в миллиметровом диапазоне длин волн [2]. Изображение объектов формируется за счет сканирования антенной радиометра по пространству. При сканировании линия визирования антенны смещается непрерывно по азимуту (вдоль строки) с дискретным съемом данных соответственно размеру элемента дискретизации (числу пикселей в строке) формируемой матрицы изображения и механически смещается по углу места (вдоль столбца) на величину, превышающую в несколько раз размер элемента дискретизации. После прохождения тракта первичной обработки принимаемых антенной сигналов формируется матрица радиометрического изображения объектов (матрица наблюдения) с пропусками изображения между пропущенными строками при переходе от одной строки к другой с большим шагом по углу места, чем шаг дискретизации по азимуту.
Уменьшать шаг по углу места нецелесообразно, так как увеличивается время формирования матрицы изображения, обусловленное временем накопления сигнала в радиометре. Так как ширина диаграммы направленности антенны (ДНА) составляет 1°-3° (на уровне 0,5 мощности), то радиометрическое изображение объектов получается размытым. Для повышения четкости изображения (повышения пространственной разрешающей способности) матрицу радиометрического изображения обрабатывают алгоритмами восстановления изображений, например [3], в основе работы которых лежит модель свертки цифровых сигналов, полученных после прохождения тракта первичной обработки и запомненных на каждом шаге дискретизации величинами амплитуд y(ij) в i-x, j-x элементах матрицы Y={y(i,j)}:


где 2n+1 - ширина (ДНА) по углу места и азимуту; α(i,j) - коэффициенты аппаратной функции (АФ), описывающей действие антенны и тракта первичной обработки на принимаемые сигналы; x(i,j) - элементы матрицы X искомого (восстанавливаемого) изображения объектов: X={x(i,j)}, 
 N - число строк и столбцов матрицы X; p(i,j) - шумы аппаратуры в виде белого шума.
N - число строк и столбцов матрицы X; p(i,j) - шумы аппаратуры в виде белого шума.
Одним из широко применяемых методов восстановления X в частотной области является двумерный фильтр Винера [3, 4]. Известен способ применения фильтра Винера для восстановления изображения в матрице с пропущенными строками [5], который рассмотрим в качестве прототипа. Способ заключается в построчном сканировании антенны радиометра по азимуту и углу места с шагом по углу места большим, чем шаг дискретизации искомого изображения, с последующей обработкой матрицы наблюдений в частотной области, отличающийся тем, что между соседними строками разреженной матрицы наблюдений располагают новые строки по числу недостающих элементов дискретизации угла места, а элементы этих строк получают линейной интерполяцией соответствующих элементов соседних строк исходной матрицы, затем полученную расширенную матрицу подвергают преобразованию Фурье, умножают результат преобразования на передаточную функцию восстанавливающего фильтра, осуществляют обратное преобразование Фурье и получают матрицу восстановленного изображения объектов.
Указанный способ обладает следующим недостатком: при интерполяции пропущенных строк матрицы радиометрического изображения Y частично теряется информация об искомом изображении X и, как следствие, понижается точность восстановления X и соответственно ухудшается пространственное разрешение восстановленного изображения по сравнению с тем случаем, когда матрица радиометрического изображения Y формируется без пропуска строк с одинаковым шагом по азимуту и углу места.
Технический результат направлен на устранение указанного недостатка, а именно на повышение точности восстановления искомого изображения объектов при наличии пропусков радиометрического изображения.
Технический результат предлагаемого технического решения достигается применением способа наблюдения за объектами с помощью радиометра с двумя антеннами, который заключается в сканировании первой антенны радиометра по азимуту с шагом дискретизации искомого изображения и сканировании по углу места с шагом, большим, чем шаг дискретизации, формировании первой матрицы наблюдения с пропущенными строками, заполнении пропущенных строк интерполяцией соседних строк и последующей обработке полученной матрицы двумерным восстанавливающим фильтром Винера, отличающийся тем, что одновременно используют вторую антенну радиометра, сканирующую по углу места с шагом дискретизации и по азимуту с шагом, большим, чем шаг дискретизации, формируют вторую матрицу наблюдения с пропущенными столбцами, заполняют пропущенные столбцы интерполяцией соседних столбцов и обрабатывают полученные две матрицы двумерным восстанавливающим фильтром Винера, после чего все пары соответствующих элементов двух матриц сравнивают с заданной амплитудой и выбирают из каждой пары один элемент, наиболее близкий в этой амплитуде, затем выбранные элементы помещают в одну матрицу восстановленного изображения объектов с повышенным пространственным разрешением.
Способ осуществляется следующим образом.
1. Первая антенна сканирует по пространству с шагом по углу места, большим, чем шаг дискретизации восстанавливаемого изображения X={x(i,j)}. В результате получается матрица наблюдений Y1={y1(i,j)}, элементы которой y1(i,j) отвечают модели (1), а нумерация строк, в отличие от (2), осуществляется с шагом m: 
 где m принимает возможные значения от 2 до n, то есть расстояние по углу места между соседними наблюдаемыми строками не превышает половины ширины ДНА. Ненаблюдаемые строки в матрице Y1 (пропущенные при сканировании, а также строки с номерами
где m принимает возможные значения от 2 до n, то есть расстояние по углу места между соседними наблюдаемыми строками не превышает половины ширины ДНА. Ненаблюдаемые строки в матрице Y1 (пропущенные при сканировании, а также строки с номерами 
 не рассматриваются или заполняются нулями.
не рассматриваются или заполняются нулями.
2. Между соседними наблюдаемыми строками матрицы Y1 помещаются m-1 строк по числу m-1 недостающих элементов дискретизации угла места, а элементы этих строк вычисляются интерполяцией соответствующих элементов соседних i-й и (i+1)-й строк матрицы Y, например, методом линейной интерполяции по формуле:

Возможна более сложная интерполяция: биквадратная или бикубическая.
3. Одновременно вторая антенна сканирует по пространству с шагом по азимуту, большим, чем шаг дискретизации восстанавливаемого изображения X={x(J,j)}. В результате получается матрица наблюдений Y2={y2(i,j)}, элементы которой y2(i,j) отвечают модели (1), а нумерация столбцов осуществляется с шагом m: 
 Ненаблюдаемые столбцы в матрице Y2 не рассматриваются или заполняются нулями.
Ненаблюдаемые столбцы в матрице Y2 не рассматриваются или заполняются нулями.
4. Между соседними наблюдаемыми столбцами матрицы Y2 помещаются m-1 столбцов по числу m-1 недостающих элементов дискретизации азимута, а элементы этих столбцов вычисляются интерполяцией соответствующих элементов соседних i-й и (i+1)-й столбцов матрицы Y2, например, подобно (3):
y2(i,j+j1)=y(i,j)+Δy⋅j1, 


Δy=(y2(i,j+1)-y2(i,j)/m.
5. Полученные матрицы Y1 и Y2 одновременно (в параллельных каналах обработки) подвергаются двумерному преобразованию Фурье и получаются спектральные матрицы Yƒ1={yƒ1(i,j)} и Yƒ2={yƒ2(i,j)}, 
6. Элементы матриц Yƒ1 и Yƒ2 умножаются на передаточную функцию Винера wƒ(i,j), которая вычисляется с учетом преобразования Фурье АФ α(i,j), подвергнутой периодическому продолжению [4], и получаются спектральные матрицы оценок Xƒ1={хƒ1(i,j)}, Хƒ2={хƒ2(i,j)}, где хƒ1(i,j)=yƒ1(i,j)⋅wƒ(i,j), xƒ2=(i,j)=yƒ2(i,j)⋅wƒ(i,j), 

7. Матрицы Xƒ1 и Хƒ2 подвергаются обратному двумерному преобразованию Фурье и получаются матрицы Х1={x1(i,j)}, Х2={х2(i,j} 
 восстановленного изображения объектов в пространственной области.
восстановленного изображения объектов в пространственной области.
8. Все пары x1(i,j), x2(i,j) соответствующих элементов матриц Х1 и X2: 
 сравниваются с заданной амплитудой. Из двух элементов х1(i,j) и х2(i,j) выбирается один элемент, наиболее близкий к этой амплитуде. Он запоминается как i-й, j-й элемент х*(i,j) матрицы X*={х*(i,j)},
сравниваются с заданной амплитудой. Из двух элементов х1(i,j) и х2(i,j) выбирается один элемент, наиболее близкий к этой амплитуде. Он запоминается как i-й, j-й элемент х*(i,j) матрицы X*={х*(i,j)}, 
 представляющей восстановленное изображение с повышенным пространственным разрешением.
представляющей восстановленное изображение с повышенным пространственным разрешением.
Экспериментальная часть (результаты моделирования).
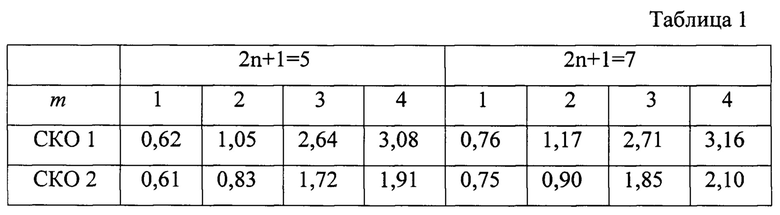
Предлагаемый способ сравнивался с прототипом на примере восстановления изображения объекта в форме рамки, расположенного в матрице изображения. В таблице 1 представлены результаты моделирования, полученные при отношении сигнал-шум = 50, амплитуде объекта А=5 и ширине ДНА 2n+1=5 и 2n+1=7 элементов дискретизации: зависимость оценки среднеквадратического отклонения (СКО1) ошибки восстановления по амплитуде от шага m формирования строк в прототипе и зависимость оценки СКO2 ошибки восстановления от шага m формирования строк и столбцов в предлагаемом способе. Для заполнения пропущенных строк и столбцов применялась линейная интерполяция. В алгоритме, реализующем предлагаемый способ, соответствующие элементы двух матриц сравнивались с максимальной амплитудой объекта (см. табл. 1).
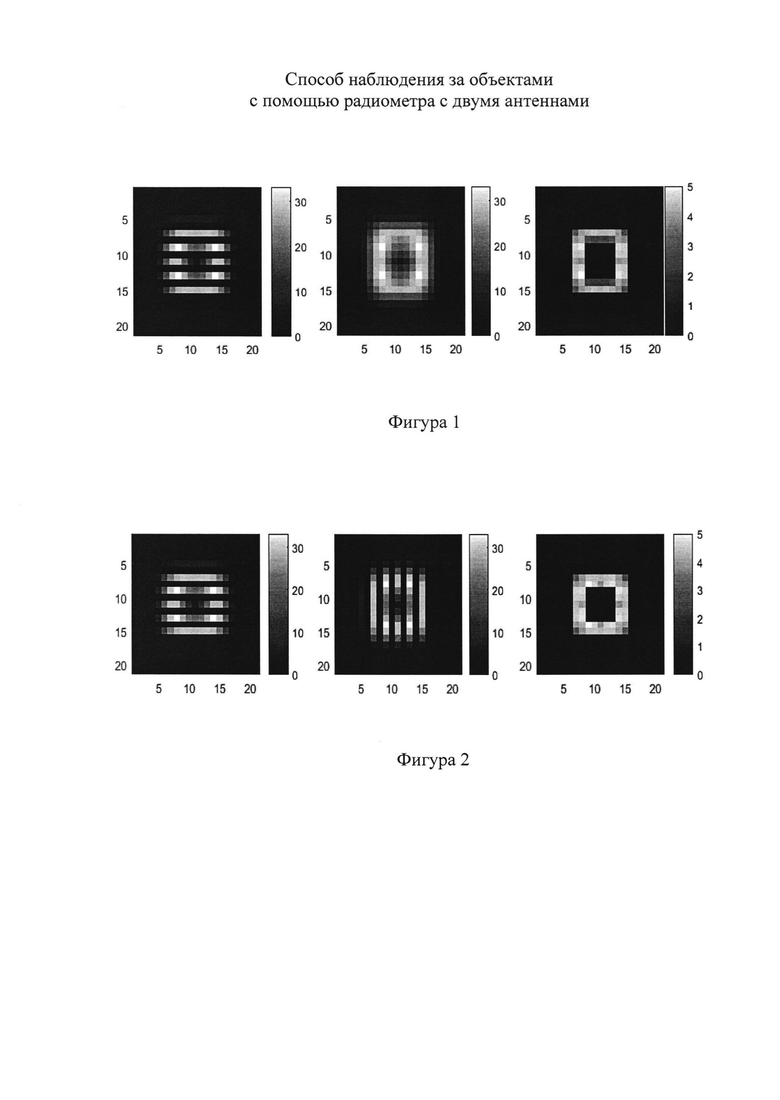
На фигуре 1 для прототипа показано слева направо: матрица наблюдения с пропущенными строками, матрица наблюдения с заполнением пропущенных строк линейной интерполяцией и матрица с изображением объекта в форме рамки, восстановленным из второй матрицы. На фигуре 2 для предлагаемого способа показано слева направо: первая матрица наблюдений с пропущенными строками, вторая матрица наблюдений с пропущенными столбцами и матрица с изображением объекта, восстановленным из первых двух матриц с заполнением пропущенных строк и столбцов линейной интерполяцией.
Результаты моделирования показывают преимущество предлагаемого способа в сравнении с прототипом по точности восстановления и, как следствие, по четкости (пространственному разрешению) изображения.
Литература
1. Шарков Е.А. Радиотепловое дистанционное зондирование Земли: физические основы: в 2 т. / Т. 1. М.: ИКИ РАН, 2014, 544 с.
2. Пирогов Ю.А., Тимановский А.Л. Сверхразрешение в системах пассивного радиовидения миллиметрового диапазона / Радиотехника, 2006. №3. С. 14-19.
3. Василенко Г.И., Тараторин A.M. Восстановление изображений. М.: Радио и связь, 1986, 304 с.
4. Гонсалес Р., Вудс Р., Эддинс С. Цифровая обработка изображений в среде MATLAB. М.: Техносфера, 2006, 616 с.
5. Патент RU 2600573 С1. Способ восстановления изображений объектов по разреженной матрице радиометрических наблюдений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ В РАДИОМЕТРЕ С ДВУМЯ АНТЕННАМИ | 2017 |
|
RU2646434C1 |
| СПОСОБ ДВУХЭТАПНОГО ВОССТАНОВЛЕНИЯ РАДИОТЕПЛОВЫХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2702228C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ИЗОБРАЖЕНИЙ В ДВУХКАНАЛЬНОЙ СКАНИРУЮЩЕЙ СИСТЕМЕ | 2016 |
|
RU2612323C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ В ДВУХКАНАЛЬНОЙ РАДИОМЕТРИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2612193C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ ПО РАЗРЕЖЕННОЙ МАТРИЦЕ РАДИОМЕТРИЧЕСКИХ НАБЛЮДЕНИЙ | 2015 |
|
RU2600573C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОМЕТРИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2661903C1 |
| Способ формирования радиотеплового изображения | 2017 |
|
RU2661491C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ИЗОБРАЖЕНИЙ В МНОГОКАНАЛЬНЫХ РТЛС | 2017 |
|
RU2656355C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОТЕПЛОВОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2019 |
|
RU2713731C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОТЕПЛОВЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2379706C2 |
Изобретение относится к радиотеплолокации, а именно к радиотеплолокационным (пассивным) системам наблюдения за объектами с помощью сканирующего радиометра, работающего в миллиметровом диапазоне длин волн в условиях повышенного шага сканирования антенны радиометра. Достигаемый технический результат - увеличение быстродействия, повышение пространственного разрешения изображения объектов, формируемого радиометром с большим шагом сканирования. Способ заключается в применении двух антенн, одновременно сканирующих по пространству в ортогональных направлениях, получении в результате сканирования двух матриц радиометрического изображения с пропусками строк и столбцов, заполнении недостающих строк и столбцов интерполяцией, обработке матриц восстанавливающим фильтром Винера и объединении результатов обработки в одной матрице с повышенным пространственным разрешением. 1 табл., 2 ил.
Способ наблюдения за объектами с помощью радиометра с двумя антеннами, заключающийся в сканировании первой антенны радиометра по азимуту с шагом дискретизации искомого изображения и сканировании по углу места с шагом большим, чем шаг дискретизации, формировании первой матрицы наблюдения с пропущенными строками, заполнении пропущенных строк интерполяцией соседних строк и последующей обработке полученной матрицы двумерным восстанавливающим фильтром Винера, отличающийся тем, что одновременно используют вторую антенну радиометра, сканирующую по углу места с шагом дискретизации и по азимуту с шагом большим, чем шаг дискретизации, формируют вторую матрицу наблюдения с пропущенными столбцами, заполняют пропущенные столбцы интерполяцией соседних столбцов и обрабатывают полученные две матрицы двумерным восстанавливающим фильтром Винера, после чего все пары соответствующих элементов двух матриц сравнивают с заданной амплитудой и выбирают из каждой пары один элемент, наиболее близкий в этой амплитуде, затем выбранные элементы помещают в одну матрицу восстановленного изображения объектов с повышенным пространственным разрешением.
| ПНЕВМОТОРОВЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ВИДЕ ДИСКА | 2012 |
|
RU2500573C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ В МНОГОКАНАЛЬНЫХ РТЛС И РЛС | 2007 |
|
RU2368917C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИОМЕТРИЧЕСКИХ КОНТРАСТОВ ЦЕЛЕЙ И РАДИОМЕТР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285940C2 |
| US 6862549 B1, 01.03.2005 | |||
| US 20160245912 A1, 25.08.2016 | |||
| JP 8240623 A, 17.09.1996 | |||
| US 5072226 A, 10.12.1991. | |||

