Изобретение относится к пассивным [1, 2] двухканальным сканирующим системам наблюдения, работающим в оптическом, инфракрасном или миллиметровом диапазонах длин волн.
Система наблюдения состоит из двух измерительных каналов. Каждый канал содержит приемное устройство - приемник, регистрирующий излучаемое объектами поле в ограниченном объеме пространства в соответствии со своей диаграммой направленности (ДН), а также тракт первичной обработки принимаемых сигналов. Приемники одновременно сканируют зону обзора размером M×N элементов дискретизации по азимуту и углу места. Первый приемник движется непрерывно вдоль строки (по азимуту) со съемом данных с малым шагом дискретизации h и осуществляет переход к другой строке с увеличенным шагом k1⋅h, k1>1, где (k1-1) - число пропущенных подряд строк. Второй приемник, наоборот, движется непрерывно вдоль столбца (по углу места) со съемом данных с малым шагом дискретизации h и осуществляет переход к другому столбцу с увеличенным шагом k2⋅h, k2>1, где (k2-1) - число пропущенных подряд столбцов.
По результатам первичной обработки формируются две матрицы наблюдений: Y1={y1(i,j)},  ,
,  и Y2={y2(i,j)},
и Y2={y2(i,j)},  ,
,  . Пропущенные при сканировании строки и столбцы в матрицах Y1 и Y2 присутствуют, но не рассматриваются.
. Пропущенные при сканировании строки и столбцы в матрицах Y1 и Y2 присутствуют, но не рассматриваются.
Модель наблюдений имеет следующий вид:

 ,
,  ,
,
 ,
,
 ,
,  ,
,
где α(i,j) - весовая функция с областью определения  ,
,  , представляющая нормированную ДН приемника; X={x(i,j)} - матрица искомого изображения с элементами x(i,j), подлежащими восстановлению на множестве элементов дискретизации
, представляющая нормированную ДН приемника; X={x(i,j)} - матрица искомого изображения с элементами x(i,j), подлежащими восстановлению на множестве элементов дискретизации  ,
,  ; P1(i,j) и p2(i,j) - шумы аппаратуры в приемных каналах в виде белого шума.
; P1(i,j) и p2(i,j) - шумы аппаратуры в приемных каналах в виде белого шума.
Задача заключается в восстановлении изображения X={x(i,j)} на множестве элементов дискретизации , путем обработки полученных наблюдений Y1={y1(i,j)} и Y2={y2(i,j)}.
Такая задача относится к классу некорректных обратных задач и решается как в пространственной, так и частотной области [3] с применением методов регуляризации, повышающих устойчивость решения.
Оптимальное решение задачи восстановления изображения X с позиции известных критериев [4] для двумерной модели измерений (1) в пространственной области требует больших предварительных вычислительных затрат и памяти при обращении матриц, что снижает устойчивость решения. При больших значениях М и N реализовать матричные методы не удается.
Оптимальное решение в частотной области [5] требует обработки всех строк и столбцов на множестве , , что достигается интерполяцией пропущенных строк и столбцов матриц Y1 и Y2. Несмотря на удобство реализации частотных методов, ошибки интерполяции наблюдений существенно снижают точность восстановления изображений.
На практике целесообразно перейти от (1) к упрощенной модели наблюдений, не учитывающей пропуски строк и столбцов:

 ,
,
где α1(j) и α2{i) - соответственно центральное горизонтальное и вертикальное сечения ДН, причем α1(0)=α2(0);  - случайные аддитивные составляющие, порожденные шумами аппаратуры и ошибками аппроксимации при переходе от (1) к (2).
- случайные аддитивные составляющие, порожденные шумами аппаратуры и ошибками аппроксимации при переходе от (1) к (2).
Число оцениваемых параметров в (2) значительно меньше, чем в (1).
В рамках модели (2) ставится одномерная задача независимого восстановления изображений в i-x строках Х1(i) и j-x столбцах Х2(j) матрицы X путем обработки i-х строк Y1(i),  матрицы Y1 и j-x столбцов Y2(j),
матрицы Y1 и j-x столбцов Y2(j),  матрицы Y2. Задача решается известными способами.
матрицы Y2. Задача решается известными способами.
В качестве прототипа может быть рассмотрен любой способ восстановления одномерного изображения: матричный способ [4] или способ фильтра Винера [5], действие которых применительно к поставленной задаче сводится к следующему:
1. На вход подается i-я строка Y1(i) первой матрицы наблюдений Y1 или j-й столбец Y2(j) второй матрицы наблюдений Y2 - одномерный массив числовых данных объема М или N.
2. К массиву данных применяется оператор восстановления, основанный на пространственной или частотной обработке.
3. В результате действия оператора восстановления на выходе получается i-я строка Х1(i) или j-й столбец Х2(j) восстановленного изображения в виде нового массива данных объема М или N.
Совокупность восстановленных строк X1(i),  и столбцов X2(j),
и столбцов X2(j),  N дает матрицу Xp решетчатой структуры восстановленного изображения, в которой пропущенные строки и столбцы присутствуют, но не рассматриваются.
N дает матрицу Xp решетчатой структуры восстановленного изображения, в которой пропущенные строки и столбцы присутствуют, но не рассматриваются.
Такой способ формирования изображений обладает следующим недостатком: решетчатая структура матрицы Xp, полученная при шаге сканирования большем, чем шаг дискретизации (k>1), дает прореженное по строкам и столбцам изображение, что затрудняет или делает невозможным распознавание изображений объектов наблюдения.
Технический результат направлен на устранение указанного недостатка, а именно на восстановление пропущенных строк и столбцов искомой матрицы изображения с целью восстановления изображения в целом.
Технический результат предлагаемого технического решения достигается тем, что способ восстановления изображений в двухканальной сканирующей системе заключается в том, что при наблюдении зоны обзора с помощью двух приемников, первый из которых дает матрицу наблюдений Y1 с пропусками строк, а второй - матрицу наблюдений Y2 с пропусками столбцов, обрабатывают наблюдаемые i-е строки Y1(i) матрицы Y1 и наблюдаемые j-е столбцы Y2(j) матрицы Y2 оператором восстановления одномерных массивов и в результате этой обработки получают в той же нумерации i-е строки Х1(i) матрицы Х1 восстановленного изображения по строкам и j-е столбцы Х2(j) матрицы Х2 восстановленного изображения по столбцам, отличающийся тем, что пропущенные строки матрицы Х1 восстанавливают путем линейной интерполяции соседних не пропущенных строк и получают матрицу  , а пропущенные столбцы матрицы Х2 восстанавливают путем линейной интерполяции соседних не пропущенных столбцов и получают матрицу
, а пропущенные столбцы матрицы Х2 восстанавливают путем линейной интерполяции соседних не пропущенных столбцов и получают матрицу  , затем все соответствующие пары элементов матриц
, затем все соответствующие пары элементов матриц  и сравнивают к заданным уровнем γ и выбирают из каждой пары один элемент, наиболее близкий в этому уровню, после чего выбранные элементы помещают в матрицу X, которая представляет восстановленное изображение без пропусков строк и столбцов.
и сравнивают к заданным уровнем γ и выбирают из каждой пары один элемент, наиболее близкий в этому уровню, после чего выбранные элементы помещают в матрицу X, которая представляет восстановленное изображение без пропусков строк и столбцов.
Способ осуществляют следующим образом:
1. Два приемника одновременно сканируют зону обзора размером M×N элементов дискретизации по азимуту (по j) и углу места (по i).
2. По результатам первичной обработки формируются две матрицы наблюдений: Y1={y1(i,j)}, , и Y2={y2(i,j)}, , , где k1, k2>1. Первый приемник дает матрицу наблюдений Y1 с пропусками строк, а второй - матрицу наблюдений Y2 с пропусками столбцов. Пропущенные при сканировании строки или столбцы присутствуют в матрицах Y1 и Y2, но не рассматриваются.
3. Наблюдаемые i-e строки Y1(i) матрицы Y1 и наблюдаемые j-е столбцы Y2(j) матрицы Y2 обрабатывают оператором восстановления одномерных массивов и в результате этой обработки получают в той же нумерации i-e строки X1(i), матрицы Х1 восстановленного изображения по строкам и j-е столбцы Х2(j), матрицы Х2 восстановленного изображения по столбцам.
4. Пропущенные строки матрицы Х1 заполняются методом линейной интерполяции: между соседними наблюдаемыми строками матрицы Х1 помещаются k1-1 строк по числу k1-1 недостающих элементов дискретизации угла места, а элементы этих строк находятся линейной интерполяцией соответствующих элементов i-й и (i+1)-й строк матрицы Х1 по формуле:
Δх1=(х1(i+k1,j)-х1(i,j))/k1,
x1(i+i1,j)=y(i,j)+Δx1⋅i1,  ,
,  ,
,  .
.
Подобным образом заполняются пропущенные столбцы матрицы Х2:
Δх2=(х2(i+k2,j)-х2(i,j))/k2,
x2(i,j+j2)=x2(i,j)+Δx2⋅j2,  ,
,  ,
,  .
.
5. После интерполяции получается матрица  с повышенным разрешением по азимуту и матрица
с повышенным разрешением по азимуту и матрица  с повышенным разрешением по углу места.
с повышенным разрешением по углу места.
Затем матрицы и объединяются в M×N-матрице оценок  искомого изображения X следующим образом.
искомого изображения X следующим образом.
6. Все пары  ,
,  соответствующих элементов матриц и
соответствующих элементов матриц и  ,
,  сравниваются с заданным уровнем γ. Из двух элементов
сравниваются с заданным уровнем γ. Из двух элементов  и
и  выбирается один элемент, наиболее близкий к этому уровню. Он запоминается как i-й, j-й элемент x(i,j) матрицы X, представляющей восстановленное изображение без пропусков строк и столбцов.
выбирается один элемент, наиболее близкий к этому уровню. Он запоминается как i-й, j-й элемент x(i,j) матрицы X, представляющей восстановленное изображение без пропусков строк и столбцов.
7. Уровень γ назначается человеком-оператором из физических соображений. Уровень может меняться в процессе наблюдения с целью повышения четкости отдельных деталей изображения.
Результаты моделирования. Способ реализовывался с применением операторов восстановления одномерных изображений в пространственной области (матричный метод) и частотной области (метод фильтра Винера). Методы показали близкую точность восстановления изображения вдоль строк и столбцов. Дополнительно небольшим порогом снимались шумовые эффекты на восстановленном изображении. При моделировании ширина ДН составляла (2m+1)×(2n+1)=7×7, отношение сигнал-шум (С-Ш) 30 и 50 при максимальной амплитуде 5, шаг по строкам и столбцам к=1, 2, 3, 4, размер объекта наблюдения L×L=5×5. ДН задавалась экспоненциальной функцией с квадратичным показателем степени. Уровень γ задавался числом 5.
В таблице представлены оценки среднеквадратического отклонения (СКО) ошибки восстановления изображения, полученные сравнением моделируемого и восстановленного изображений на множестве реализаций эксперимента, в зависимости от величины шага k по строкам и столбцам при разном отношении сигнал-шум.
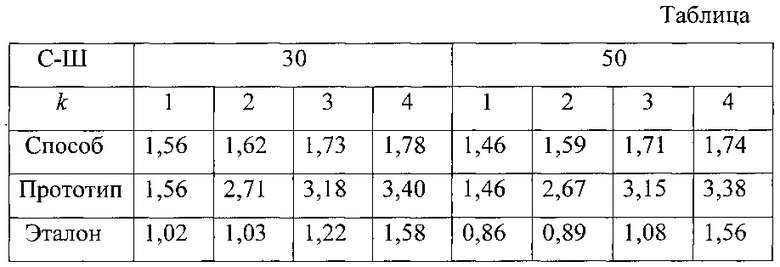
В первой строке значений СКО даны результаты, полученные предлагаемым способом. Вторая строка значений СКО соответствует прототипу, когда пропущенные строки и столбцы предварительно обнулялись, и восстановленное изображение представляло собой решетчатую матрицу. В третьей строке значений СКО представлены результаты, полученные оптимальным матричным способом восстановления, принимаемым за эталон, при совместной обработке двух матриц наблюдения Y1 и Y2, подобно предложенному способу, но на основе двумерной модели измерений (1).
Оценка разрешающей способности изображений осуществлялась нахождением минимального расстояния dmin, измеряемого в количестве строк между двумя объектами, при котором они четко различались на восстановленном изображении. Разрешение dmin=2, соответствующее 1/2 ширины ДН, достигалось: для предложенного способа при шаге k=2, для прототипа - при шаге k=1, для эталона - при шаге k=3.
Предложенный способ отличается значительной простотой реализации и не имеет ограничений на размеры матрицы изображения. Он уступает в точности восстановления оптимальному способу, который, однако, можно реализовать только для небольших матриц изображения. Результаты моделирования показали приемлемое качество восстановленного изображения.
Способ может найти применение в существующих сканирующих системах наблюдения микроволнового диапазона [2], а также в системах оптического и инфракрасного диапазонов, предназначенных для обнаружения и распознавания объектов по их восстановленному изображению.
Литература
1. Шарков Е.А. Радиотепловое дистанционное зондирование Земли: физические основы: в 2 т./ Т. 1. М.: ИКИ РАН, 2014. 544 с.
2. Пассивная радиолокация: методы обнаружения объектов / Под ред. Р.П. Быстрова и А.В. Соколова. М.: Радиотехника. 2008. 320 с.
3. Василенко Г.И., Тараторин A.M. Восстановление изображений. М.: Радио и связь, 1986. 304 с.
4. Патент RU 2 368 917 С1. Способ формирования изображений в многоканальных РТЛС и РЛС / В.К. Клочко. МПК: G01S 13/89. Приоритет 21.12.2007. Опубл.: 27.09.2009. Бюл. №27.
5. Гонсалес Р., Вудс Р., Эддинс С. Цифровая обработка изображений в среде MATLAB. М.: Техносфера, 2006. 616 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАБЛЮДЕНИЯ ЗА ОБЪЕКТАМИ С ПОМОЩЬЮ РАДИОМЕТРА С ДВУМЯ АНТЕННАМИ | 2017 |
|
RU2648270C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ИЗОБРАЖЕНИЙ В МНОГОКАНАЛЬНЫХ РТЛС | 2017 |
|
RU2656355C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ В РАДИОМЕТРЕ С ДВУМЯ АНТЕННАМИ | 2017 |
|
RU2646434C1 |
| СПОСОБ ДВУХЭТАПНОГО ВОССТАНОВЛЕНИЯ РАДИОТЕПЛОВЫХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2702228C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ В ДВУХКАНАЛЬНОЙ РАДИОМЕТРИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2612193C1 |
| Способ формирования радиотеплового изображения | 2017 |
|
RU2661491C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОМЕТРИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2661903C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ ПО РАЗРЕЖЕННОЙ МАТРИЦЕ РАДИОМЕТРИЧЕСКИХ НАБЛЮДЕНИЙ | 2015 |
|
RU2600573C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ БОРТОВОЙ СТАНЦИИ | 2011 |
|
RU2464680C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОЙ ОБСТАНОВКИ С ПОМОЩЬЮ АНТЕННОЙ РЕШЕТКИ | 2013 |
|
RU2539558C1 |
Изобретение относится к пассивным двухканальным сканирующим системам наблюдения с двумя приемниками, работающими в оптическом, инфракрасном или миллиметровом диапазонах длин волн. Технический результат направлен на восстановление пропущенных строк и столбцов искомой матрицы изображения с целью восстановления изображения в целом. Способ восстановления изображений заключается в применении оператора восстановления одномерного изображения к массиву данных отдельных строк и столбцов двух матриц наблюдения с последующей интерполяцией и объединением двух изображений в одно восстановленное изображение без пропусков строк и столбцов. 1 табл.
Способ восстановления изображений в двухканальной сканирующей системе, заключающийся в том, что при наблюдении зоны обзора с помощью двух приемников, первый из которых дает матрицу наблюдений Y1 с пропусками строк, а второй - матрицу наблюдений Y2 с пропусками столбцов, обрабатывают наблюдаемые i-е строки Y1 (i) матрицы Y1 и наблюдаемые j-е столбцы Y2 (j) матрицы Y2 оператором восстановления одномерных массивов и в результате этой обработки получают в той же нумерации i-е строки Х1 (i) матрицы Х1 восстановленного изображения по строкам и j-е столбцы Х2 (j) матрицы Х2 восстановленного изображения по столбцам, отличающийся тем, что пропущенные строки матрицы Х1 восстанавливают путем линейной интерполяции соседних не пропущенных строк и получают матрицу  , а пропущенные столбцы матрицы Х2 восстанавливают путем линейной интерполяции соседних не пропущенных столбцов и получают матрицу
, а пропущенные столбцы матрицы Х2 восстанавливают путем линейной интерполяции соседних не пропущенных столбцов и получают матрицу  , затем все соответствующие пары элементов матриц и сравнивают к заданным уровнем γ и выбирают из каждой пары один элемент, наиболее близкий в этому уровню, после чего выбранные элементы помещают в матрицу X, которая представляет восстановленное изображение без пропусков строк и столбцов.
, затем все соответствующие пары элементов матриц и сравнивают к заданным уровнем γ и выбирают из каждой пары один элемент, наиболее близкий в этому уровню, после чего выбранные элементы помещают в матрицу X, которая представляет восстановленное изображение без пропусков строк и столбцов.
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ В МНОГОКАНАЛЬНЫХ РТЛС И РЛС | 2007 |
|
RU2368917C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ СО СТАЦИОНАРНЫМ ЦЕНТРОМ ВРАЩЕНИЯ | 2006 |
|
RU2304289C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
| WO 2011001141 A1, 06.01.2011 | |||
| КОНСТРУКЦИЯ УСТАНАВЛИВАЕМОЙ И СНИМАЕМОЙ ПАНЕЛИ ДЛЯ ВНУТРЕННИХ СТЕН | 2008 |
|
RU2385391C2 |
| US 5557283 A, 17.09.1996 | |||
| JP 2008215935 A, 18.09.2008. | |||

