Изобретение относится к пассивной радиолокации, а именно к радиотеплолокационным станциям (РТЛС) наблюдения за поверхностью и воздушной обстановкой на базе подвижных или неподвижных носителей РТЛС со сканирующими совмещенными по центру антеннами радиометрических каналов с различными характеристиками диаграмм направленности антенн (ДН).
При наблюдении РТЛС за наземными и воздушными объектами осуществляется построчное сканирование антенной РТЛС зоны обзора с непрерывным смещением антенны по азимуту и углу места [1, с.71-73, 2, 3]. При этом формируется двумерное радиотеплоизображение (РТИ) объектов и подстилающей поверхности. Четкость РТИ и точность определения угловых координат объектов на РТИ при таком способе формирования изображения ограничена шириной ДНА. Поэтому изображение получается смазанным по угловым координатам. Возникает проблема повышения разрешающей способности РТИ по углам за счет алгоритмической обработки наблюдаемых смазанных изображений. Известны способы повышения разрешающей способности по угловым координатам для сканирующих РЛС [4, 5], которые могут быть использованы также для формирования РТИ на базе сканирующих РТЛС. Однако эти способы обладают одним общим недостатком - ограниченной точностью восстановления изображений из-за малого числа измерительных каналов и потерей информации об изображении по периметру зоны обзора.
Наиболее близким по технической сущности является способ повышения разрешающей способности по угловым координатам [4], который заключается в восстановлении матрицы изображения в срезах дальности и сводится к следующим операциям.
1. Антенну РЛС последовательно смещают по азимуту и углу места соответственно на величину (2n+1)-й и (2m+1)-й части ширины ДН построчно в зоне обзора. Ширина ДН составляет 2n+1 элементов дискретизации по азимуту и 2m+1 элементов дискретизации по углу места.
2. Полученные при каждом i, j-м положении луча амплитуды отраженных сигналов на выходе одного суммарного канала РЛС y(i, j) формируют в матрицу измерений y(i, j),  ,
,  .
.
3. Относительно каждого i, j-гo элемента x(i, j),  ,
,  , искомой матрицы изображения X строится
, искомой матрицы изображения X строится плавающее окно размера (2m1+1)×(2n1+1), m1<m, n1<n. Амплитуды y(i+i1, j+j1) матрицы измерений Y, взятые в этом окне при
плавающее окно размера (2m1+1)×(2n1+1), m1<m, n1<n. Амплитуды y(i+i1, j+j1) матрицы измерений Y, взятые в этом окне при  ,
, 
суммируют по i1 и j1 с весовыми коэффициентами h(i1, j1), расчет которых осуществляется заранее по определенной методике. Для ДНА суммарного канала, которая описывается функцией с разделенными переменными по угловым координатам, весовые коэффициенты разделяются по переменным: h(i,j)=h1(i)·h2(j), и двойная сумма вычисляется как повторная сумма:

в виде двукратного повторения одномерных операций: вначале по строкам и затем по столбцам. Операции (1) выполняются в процессе формирования строк матрицы измерений Y, что увеличивает быстродействие алгоритма восстановления изображения X.
4. Полученные оценки 
 располагают в составе матрицы
располагают в составе матрицы  , которая представляет собой восстановленное в данном сечении дальности изображение в i, j-x синтезированных элементах разрешения по азимуту и углу места, размеры которых в несколько раз меньше ширины ДНА.
, которая представляет собой восстановленное в данном сечении дальности изображение в i, j-x синтезированных элементах разрешения по азимуту и углу места, размеры которых в несколько раз меньше ширины ДНА.
5. Применительно к РТЛС под сечением дальности будет пониматься весь диапазон дальности в зоне обзора. Поэтому, в отличие от радиолокационного [4], РТИ будет получаться двумерным в координатах угол места - азимут.
Однако указанный способ обладает следующими недостатками.
1. Способ ограничен рассмотрением только одного канала измерения и не предусматривает возможность увеличения числа каналов, что привело бы к повышению точности оценивания амплитуд и, как следствие, повышению разрешающей способности изображений.
2. В полученной матрице оценок  с элементами
с элементами 
 теряется информация об изображении по периметру зоны обзора, и матрица
теряется информация об изображении по периметру зоны обзора, и матрица  с элементами
с элементами 

 оказывается полностью не заполненной. Это вызвано тем, что в плавающем окне вычисляется только одна оценка, соответствующая центру окна.
оказывается полностью не заполненной. Это вызвано тем, что в плавающем окне вычисляется только одна оценка, соответствующая центру окна.
Технический результат направлен на повышение разрешающей способности РТИ по угловым координатам и расширение области четкого видения до области обзора РТЛС.
Технический результат предлагаемого технического решения достигается тем, что способ повышения разрешающей способности радиотепловых изображений заключается в том, что при наблюдении за поверхностью или воздушной обстановкой с помощью сканирующей РТЛС с одной антенной, ДН которой описывается функцией с разделенными переменными, последовательно смещают антенну по азимуту и углу места соответственно на величину (2n+1)-й и (2m+1)-й части ширины ДН построчно в зоне обзора, измеряют амплитуды принимаемых сигналов при каждом i, j-м положении антенны и формируют из этих амплитуд матрицу измерений Y11 с элементами y(i, j),  ,
,  , которую далее обрабатывают, отличающийся тем, что в антенной системе число каналов k увеличивают до К, где k=1, 2, …, K, дополнительно формируют матрицы измерений амплитуд основных каналов Y22, …, YKK, параллельно формируют матрицы измерений амплитуд смешанных каналов Yqk, где
, которую далее обрабатывают, отличающийся тем, что в антенной системе число каналов k увеличивают до К, где k=1, 2, …, K, дополнительно формируют матрицы измерений амплитуд основных каналов Y22, …, YKK, параллельно формируют матрицы измерений амплитуд смешанных каналов Yqk, где  ,
,  , q≠k, которые синтезируются на основе матриц Ykk,
, q≠k, которые синтезируются на основе матриц Ykk,  составляют из полученных матриц блочную матрицу Y, затем умножают блочную матрицу Y слева и справа на блочные матрицы весовых коэффициентов НA и НB, вычисляемые заранее, и формируют матрицу оценок амплитуд всей I×J-зоны обзора
составляют из полученных матриц блочную матрицу Y, затем умножают блочную матрицу Y слева и справа на блочные матрицы весовых коэффициентов НA и НB, вычисляемые заранее, и формируют матрицу оценок амплитуд всей I×J-зоны обзора  представляющую собой матрицу радиотеплового изображения поверхности или воздушной обстановки в виде совокупности амплитуд сигналов излучения в элементах дискретизации угломерного пространства с возможностью их отображения на экране индикатора РТЛС.
представляющую собой матрицу радиотеплового изображения поверхности или воздушной обстановки в виде совокупности амплитуд сигналов излучения в элементах дискретизации угломерного пространства с возможностью их отображения на экране индикатора РТЛС.
Способ осуществляется следующим образом.
1. Антенная система, представляющая собой в общем случае несколько совмещенных по центру антенн с разными характеристиками ДН, описываемыми функциями с разделенными по углам переменными, сканирует зону обзора построчно, смещаясь по азимуту и углу места соответственно на (2n+1)-ю и (2m+1)-ю часть ширины ДН.
2. Цифровая система обработки принимаемых радиометром сигналов измеряет в каждом k-м канале (k=1, 2, …, К) амплитуды сигналов, привязывает эти амплитуды к соответствующим i, j-м положениям антенны и формирует матрицы измерений основных каналов Y11, Y22, …, YKK.
2. Параллельно формируются матрицы измерений смешанных каналов Yqk,  ,
,  , q≠k. Эти матрицы синтезируются на основе матриц Ykk,
, q≠k. Эти матрицы синтезируются на основе матриц Ykk,  основных каналов в соответствии с методикой, изложенной в расчетной части.
основных каналов в соответствии с методикой, изложенной в расчетной части.
3. Предусматривается работа антенной системы, состоящей из К2 каналов: К основных и К2-К смешанных. Смешанные i, j-e каналы обладают характеристиками ДНА, соответствующими по углу места i-му и по азимуту j-му основным каналам. После приема и обработки сигналов в смешанных каналах формируются матрицы измерений Yqk,  ,
,  , q≠k. ДН всех каналов описываются функциями с разделенными переменными.
, q≠k. ДН всех каналов описываются функциями с разделенными переменными.
4. Из полученных матриц составляется блочная матрица измерений Y=(Yqk) и вычисляется матрица оценок амплитуд  с элементами
с элементами  ,
,  ,
,  по формуле
по формуле

где НA и НB - в общем случае блочные матрицы весовых коэффициентов, которые вычисляются заранее в соответствии с методикой, изложенной в расчетной части.
5. Матрица  представляет собой восстановленное в элементах дискретизации изображение поверхности или воздушной обстановки в зоне обзора РТЛС с повышенным в несколько раз разрешением по углам, которое выводится на экран индикатора.
представляет собой восстановленное в элементах дискретизации изображение поверхности или воздушной обстановки в зоне обзора РТЛС с повышенным в несколько раз разрешением по углам, которое выводится на экран индикатора.
Расчет матриц весовых коэффициентов сводится к следующему.
Дискретная модель измерений в q, k-м канале при i, j-м положении антенны на выходе цифровой системы обработки приемного сигнала описывается следующей суммарной зависимостью:

где αqk(i1, j1) - нормированные коэффициенты ДН q, k-гo канала, характеризующие интенсивность прихода сигнала с i1, j1-го углового направления относительно (i, j); x(i, j) - искомые параметры, характеризующие амплитуды сигналов излучения в i, j-x элементах дискретизации; рqk(i, j) - центрированные гауссовские помехи q, k-гo канала: pqk(i, j)∈N(0, σ2 P), включающие в себя ошибки формирования модели (3) и шумы аппаратуры.
Для круговых и веерных ДН антенн РТЛС коэффициенты ДН могут быть представлены как функции с разделенными переменными:

например: αqk(i, j)=exp(-λq·i2)·exp(-µk·j2),
где λq, µk - параметры аппроксимации ДН соответственно по вертикали и горизонтали (для круговой ДНА λq=µq).
С учетом свойства (4) модель (3) принимает вид

что позволяет представить совокупность i, j-x измерений,  ,
,  в следующей матричной форме:
в следующей матричной форме:

где Yqk=(Уqk(i, j) - I×J-матрица измерений q, k-гo канала; А=(αsi)-I×(I+2m)-матрица ленточного типа коэффициентов ДН, описывающая смазывание изображения по вертикали; Х=(x(i, j)) - (I+m)×(J+m)-матрица искомых параметров поля излучения;  - (J+2n)×J-матрица ленточного типа коэффициентов ДН, описывающая смазывание изображения по горизонтали, причем для круговой ДН матрицы А и В совпадают: А=В; P=(p(i, j)) - I×J-матрица помех; Т - символ транспонирования.
- (J+2n)×J-матрица ленточного типа коэффициентов ДН, описывающая смазывание изображения по горизонтали, причем для круговой ДН матрицы А и В совпадают: А=В; P=(p(i, j)) - I×J-матрица помех; Т - символ транспонирования.
Помещая матрицы формулы (6) в соответствующие блочные матрицы Y, А, В, Р, получим следующую матрично-блочную модель измерений:
где матрица Х умножается на блочные матрицы по правилу кронекеровского произведения [6].
В частном случае для двух основных каналов РТЛС (К=2) имеем:

Поиск оптимальной оценки искомой матрицы Х можно подчинить следующему условию:

где матричная функция F характеризует отклонение  измерений Y от оценок измерений
измерений Y от оценок измерений  , восстановленных на основе
, восстановленных на основе  с точностью до ошибок измерения Р и ошибок оценивания
с точностью до ошибок измерения Р и ошибок оценивания 

След Tr[F] матрицы (9) представляет собой сумму квадратов отклонения измерений всех каналов от их восстановленных значений.
Решением задачи (8) является матрица оценок :

Вычисление (10) равносильно двухэтапной процедуре метода наименьших квадратов (МНК) - вначале устраняется смазывание вдоль строк матрицы изображения, а затем устраняется смазывание вдоль столбцов:

Реализация (11) приводит к следующему алгоритму:

где при обращении матриц используется параметр регуляризации δ [8, с.55], а матрицы весовых коэффициентов НA и HB вычисляются заранее и в случае круговых ДНА совпадают: НA=НB.
Окончательно можно записать следующую формулу нахождения матрицы оценок :

что эквивалентно (11).
Для РТЛС с двумя основными каналами выражения (12) раскрываются:



где  и аналогично для ВT B.
и аналогично для ВT B.
Введение параметра регуляризации δ при обращении матриц осуществляется аналогично (12). Каждый этап процедуры (14) выполняется однотипно, причем для круговых ДНА: А=В и НA=НB, что удобно с вычислительной точки зрения.
Нахождение оценок матриц измерений смешанных каналов можно осуществить на основе измерений первого канала (с наиболее узкой ДН):


В случае круговых ДН: А=В и  .
.
Для оценок  и
и  вводится параметр регуляризации δ, необходимый для обращения матриц:
вводится параметр регуляризации δ, необходимый для обращения матриц:
 ,
,  .
.
Точность восстановления РТИ (оценивания X) при использовании оценок  ,
,  вместо реальных измерений Y21, Y12 снижается, поэтому целесообразней вместо синтезированных измерений
вместо реальных измерений Y21, Y12 снижается, поэтому целесообразней вместо синтезированных измерений  ,
,  использовать реальные измерения Y21, Y12 смешанных каналов.
использовать реальные измерения Y21, Y12 смешанных каналов.
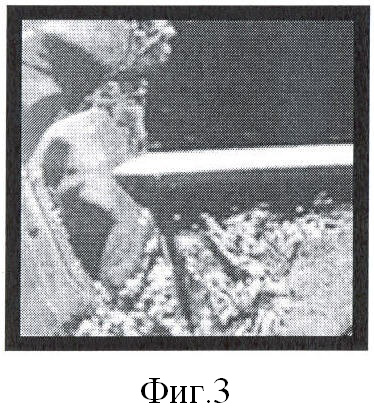
Результаты моделирования. Фиг.1-3 показывают: фиг.1 - моделируемое изображение поверхности; фиг.2 - изображение, сжатое по строкам и столбцам в 7 раз - имитация сканирования 7×7-ДН зоны обзора со смещением на ширину ДН; фиг.3 - изображение, восстановленное двухэтапным алгоритмом (14) при поэлементном сканировании ДН зоны обзора.
Предлагаемый способ позволяет в несколько раз повысить разрешающую способность РТЛС по азимуту и углу места с сохранением области обзора РТЛС по азимуту и углу места и сформировать матрицу радиотеплового изображения поверхности или воздушной обстановки в виде совокупности оценок амплитуд сигналов излучения в элементах дискретизации угломерного пространства с их отображением на экране индикатора. Это дает возможность проводить наблюдения за наземными и воздушными объектами в условиях отсутствия оптической видимости.
Литература
1. Николаев А.Г., Перцов С. В. Радиотеплолокация. М.: Воен. изд-во., 1970. 132 с.
2. Пирогов Ю.А. Пассивное радиовидение в миллиметровом диапазоне // Радиотехника. 2003. №2. С.4-11.
3. Пирогов Ю.А., Тимановский А.Л. Сверхразрешение в системах пассивного радиовидения миллиметрового диапазона// Радиотехника. 2006. №3.
4. Патент RU 2284548 C1. Способ наблюдения за поверхностью и воздушной обстановкой на базе бортовой РЛС / В.К.Клочко. МПК: G01S 13/02. Приоритет 23.06.2005. Опубл.: 27.09.2006. Бюл. №27.
5. Патент RU 2292060 C1. Способ наблюдения за воздушными объектами и поверхностью на базе бортовой РЛС / В.К.Клочко. МПК: G01S 13/02. Приоритет 28.06.2005. Опубл.: 20.01.2007. Бюл. №2.
6. Беллман Р. Введение в теорию матриц / Пер. с англ. М.: Наука. 1976.
7. Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию / Пер. с англ. М.: Радио и связь, 1986. 448 с.
8. Василенко Г.И., Тараторин A.M. Восстановление изображений. М.: Радио и связь, 1986. 304 с.


Изобретение относится к пассивной радиолокации, а именно к радиотеплолокационным станциям (РТЛС) наблюдения за поверхностью и воздушной обстановкой на базе подвижных или неподвижных носителей РТЛС со сканирующими совмещенными по центру антеннами радиометрических каналов с различными характеристиками диаграмм направленности антенн (ДН). Достигаемый технический результат заключается в повышении разрешающей способности радиотепловых изображений по угловым координатам и расширении области четкого видения до области обзора РТЛС. Способ повышения разрешающей способности радиотепловых изображений заключается в том, что при наблюдении за поверхностью или воздушной обстановкой с помощью сканирующей РТЛС с несколькими совмещенными по центру антеннами, ДН которых описывается функциями с разделенными переменными, формируют блочную матрицу измерений основных и смешанных каналов, затем умножают матрицу измерений слева и справа на матрицы весовых коэффициентов, рассчитываемых заранее по определенной методике, в результате чего получают матрицу оценок амплитуд, представляющую собой восстановленное изображение объектов в зоне обзора РТЛС с повышенным в несколько раз разрешением по угловым координатам. 3 ил.
Способ повышения разрешающей способности радиотепловых изображений, заключающийся в том, что при наблюдении за поверхностью или воздушной обстановкой с помощью сканирующей радиотеплолокационной станции (РТЛС) с одной антенной, диаграмма направленности (ДН) которой описывается функцией с разделенными переменными, последовательно смещают антенну по азимуту и углу места соответственно на величину (2n+1)-й и (2m+1)-й частей ширины ДН построчно в зоне обзора, измеряют амплитуды принимаемых сигналов при каждом i, j-м положении антенны и формируют из этих амплитуд матрицу измерений Y11 с элементами y(i, j), 
 которую далее обрабатывают, отличающийся тем, что в данной антенной системе число каналов k увеличивают до K, где k=1, 2, …, K, дополнительно формируют матрицы измерений амплитуд основных каналов Y22, …, Ykk, параллельно формируют матрицы измерений амплитуд смешанных каналов Yqk, где
которую далее обрабатывают, отличающийся тем, что в данной антенной системе число каналов k увеличивают до K, где k=1, 2, …, K, дополнительно формируют матрицы измерений амплитуд основных каналов Y22, …, Ykk, параллельно формируют матрицы измерений амплитуд смешанных каналов Yqk, где 
 q≠k, которые синтезируются на основе матриц Ykk,
q≠k, которые синтезируются на основе матриц Ykk,  составляют из полученных матриц блочную матрицу Y, затем умножают блочную матрицу Y слева и справа на блочные матрицы весовых коэффициентов НA и НB, вычисляемых заранее, и формируют матрицу оценок амплитуд всей I×J-зоны обзора
составляют из полученных матриц блочную матрицу Y, затем умножают блочную матрицу Y слева и справа на блочные матрицы весовых коэффициентов НA и НB, вычисляемых заранее, и формируют матрицу оценок амплитуд всей I×J-зоны обзора  представляющую собой матрицу радиотеплового изображения поверхности или воздушной обстановки в виде совокупности амплитуд сигналов излучения в элементах дискретизации угломерного пространства с возможностью их отображения на экране индикатора РТЛС.
представляющую собой матрицу радиотеплового изображения поверхности или воздушной обстановки в виде совокупности амплитуд сигналов излучения в элементах дискретизации угломерного пространства с возможностью их отображения на экране индикатора РТЛС.
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ И ВОЗДУШНОЙ ОБСТАНОВКОЙ НА БАЗЕ БОРТОВОЙ РЛС | 2005 |
|
RU2284548C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ И ПОВЕРХНОСТЬЮ НА БАЗЕ БОРТОВОЙ РЛС | 2005 |
|
RU2292060C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| US 5442364 A, 15.08.1995 | |||
| US 5329286 A, 12.07.1994 | |||
| Устройство для получения потока сыпучих материалов с заданной плотностью | 1977 |
|
SU690315A1 |
| US 5896098 A, 20.04.1999. | |||

