Изобретение относится к инструменту, предназначенному для подъема транспортного средства относительно опорной плоскости, по которой должно перемещаться транспортное средство.
В области автотранспорта известны многие инструменты, называемые домкратами. Домкрат, поставляемый вместе с транспортным средством, позволяет заменить колесо, например, в случае прокола. Широко распространенная модель домкрата классически содержит несколько подвижных плеч, выполненных с возможностью поворота относительно друг друга. Плечи расположены в виде ромба, и расположенная горизонтально винтовая система позволяет изменять одну из диагоналей ромба. Длина другой диагонали меняется в противоположном направлении и позволяет поднять транспортное средство над землей. Домкрат этого типа требует относительно большого времени маневрирования.
Соответствующие инструменты были разработаны для использования в цеху. Например, можно указать инструменты, содержащие гидравлический или пневматический силовой цилиндр и позволяющие поднимать транспортное средство напрямую или через систему угловой передачи. Инструмент этого типа является намного более габаритным и более дорогим, чем автомобильный домкрат.
Как правило, известные инструменты содержат множество подвижных деталей, которые утяжеляют инструмент, делают его сложным и дорогим и могут стать причиной поломки.
Изобретение призвано решить все или часть вышеупомянутых проблем и предложить гораздо более простой инструмент, предназначенный для подъема транспортного средства. Во время работы заявленный инструмент является моноблочным, то есть не имеет подвижных деталей.
В связи с этим, объектом изобретения является инструмент, предназначенный для подъема транспортного средства относительно опорной плоскости, по которой должно перемещаться транспортное средство, отличающийся тем, что выполнен в виде моноблочной детали, содержащей плечо, проходящее в основном вдоль главной оси, которое располагают между транспортным средством и опорной плоскостью и которым управляет оператор по существу поворотным движением вокруг главной оси плеча, и тем, что в сечении плеча, перпендикулярном к главной оси и расположенном вдоль главной оси, определяют два габаритных расстояния D1 и D2, смещенные в угловом направлении относительно друг друга, и тем, что первое расстояние D1 меньше второго расстояния D2, при этом расстояние D1 должно быть меньше расстояния D, отделяющего транспортное средство от опорной плоскости, и расстояние D2 должно превышать расстояние D.
В предпочтительном варианте выполнения инструмент содержит съемную ручку плеча, обеспечивающую в смонтированном положении поворот плеча вокруг его главной оси. Ручка и плечо содержат магнитные элементы, взаимодействующие между собой для удержания ручки и плеча в демонтированном положении.
Изобретение и его другие преимущества будут более очевидны из нижеследующего подробного описания варианта выполнения, представленного в качестве примера, со ссылками на прилагаемые чертежи, на которых:
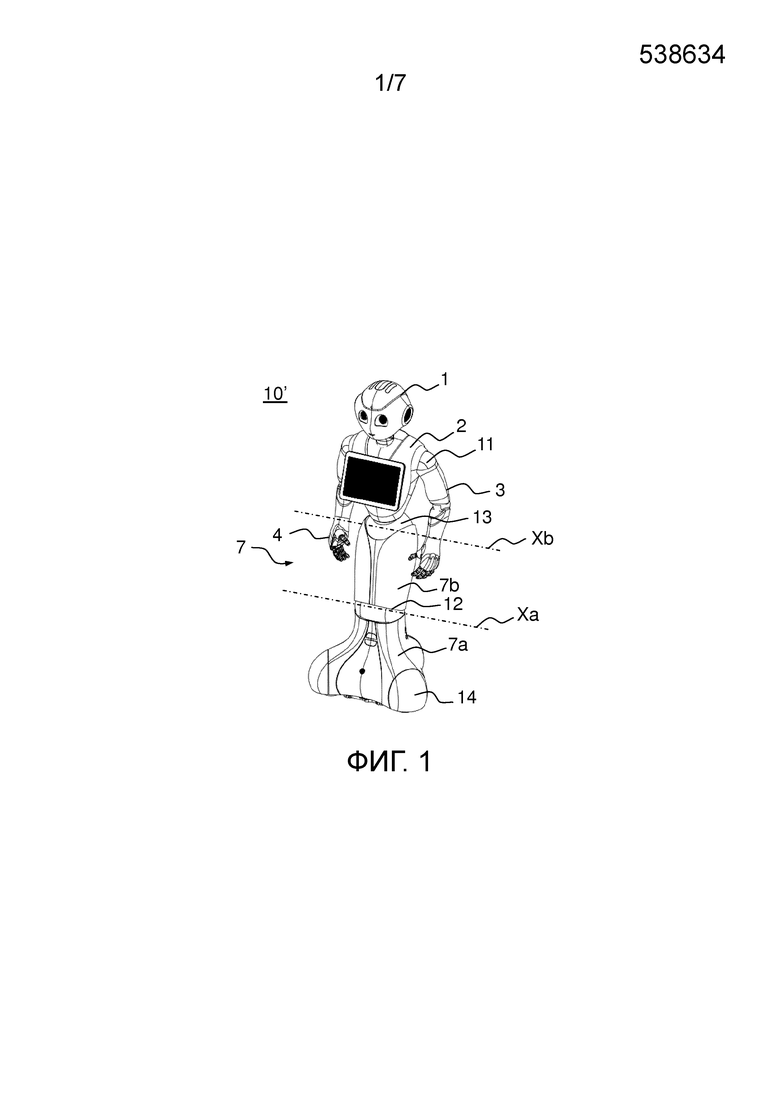
Фиг. 1 - пример робота, который можно поднимать при помощи заявленного инструмента.
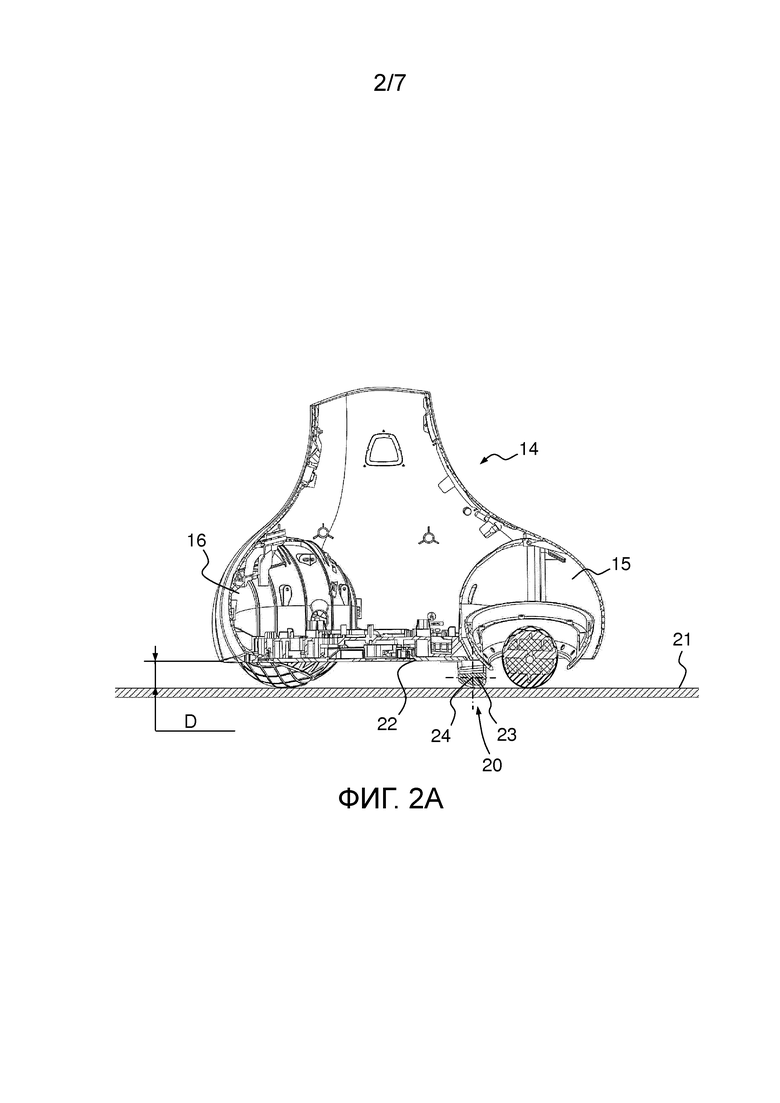
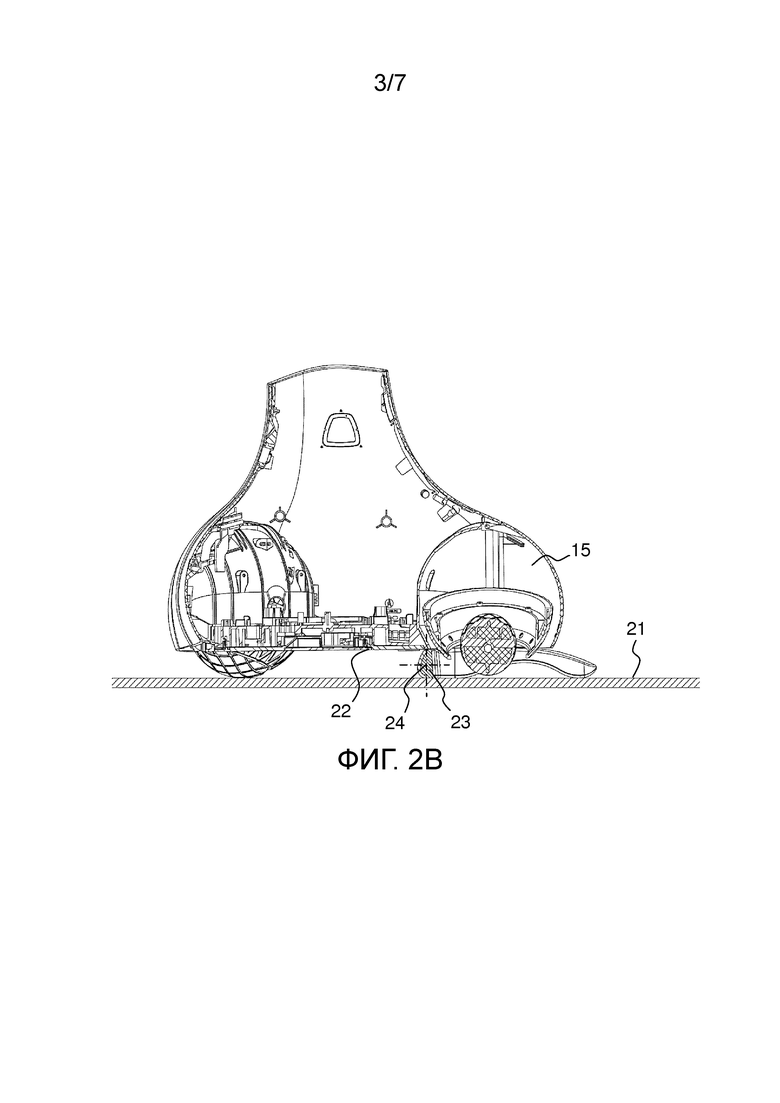
Фиг. 2а и 2b - пример заявленного инструмента, расположенного относительно основания робота, показанного на фиг.1.
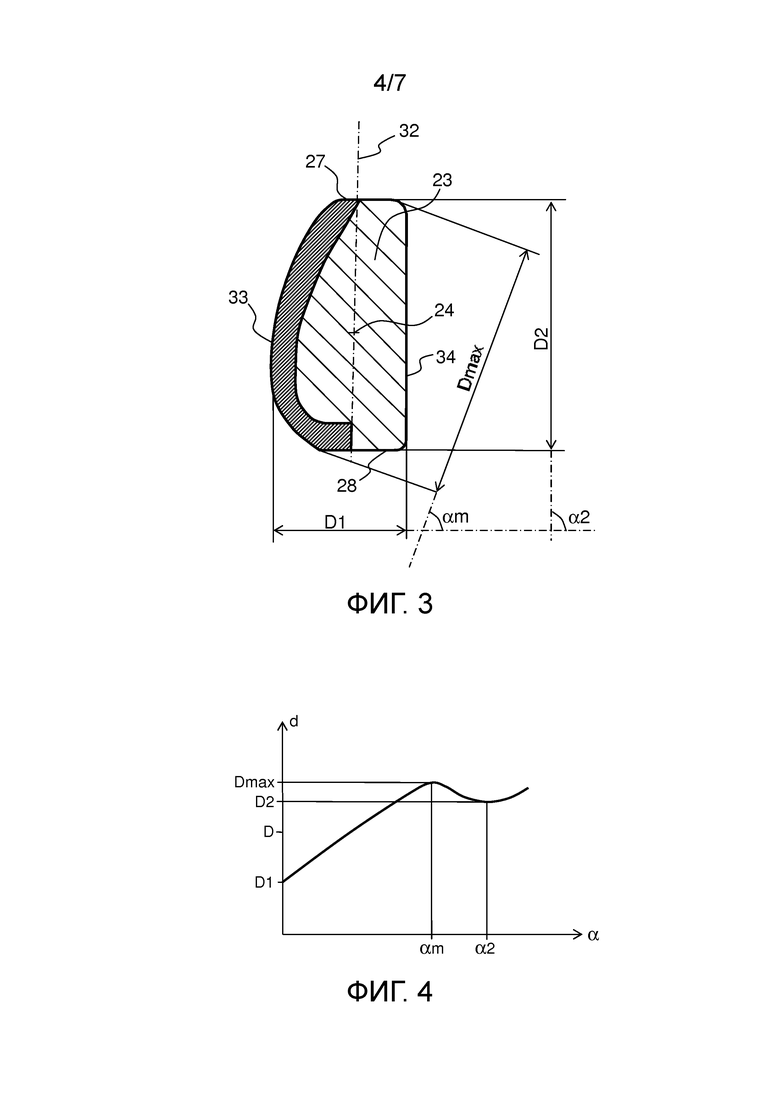
Фиг. 3 - вид в разрезе инструмента, показанного на фиг. 2а и 2b.
Фиг. 4 - кривая, показывающая характер изменения текущего расстояния d сечения инструмента в зависимости от угла поворота инструмента.
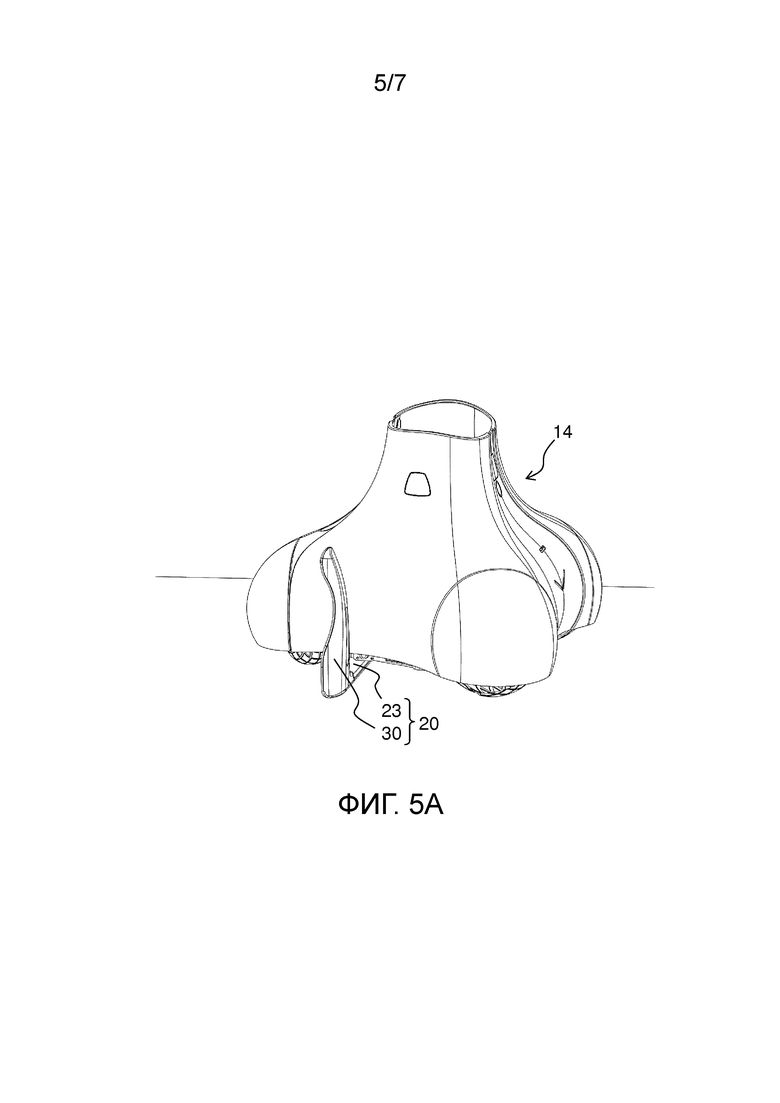
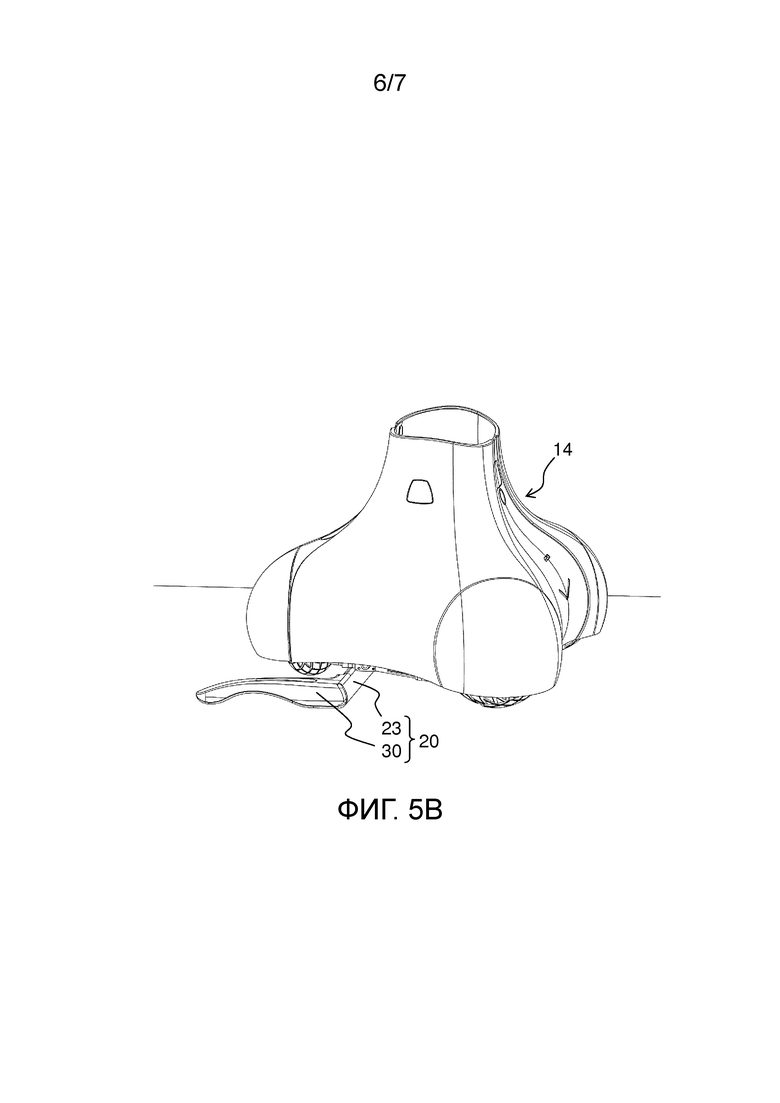
Фиг. 5а и 5b - инструмент, оснащенный ручкой.
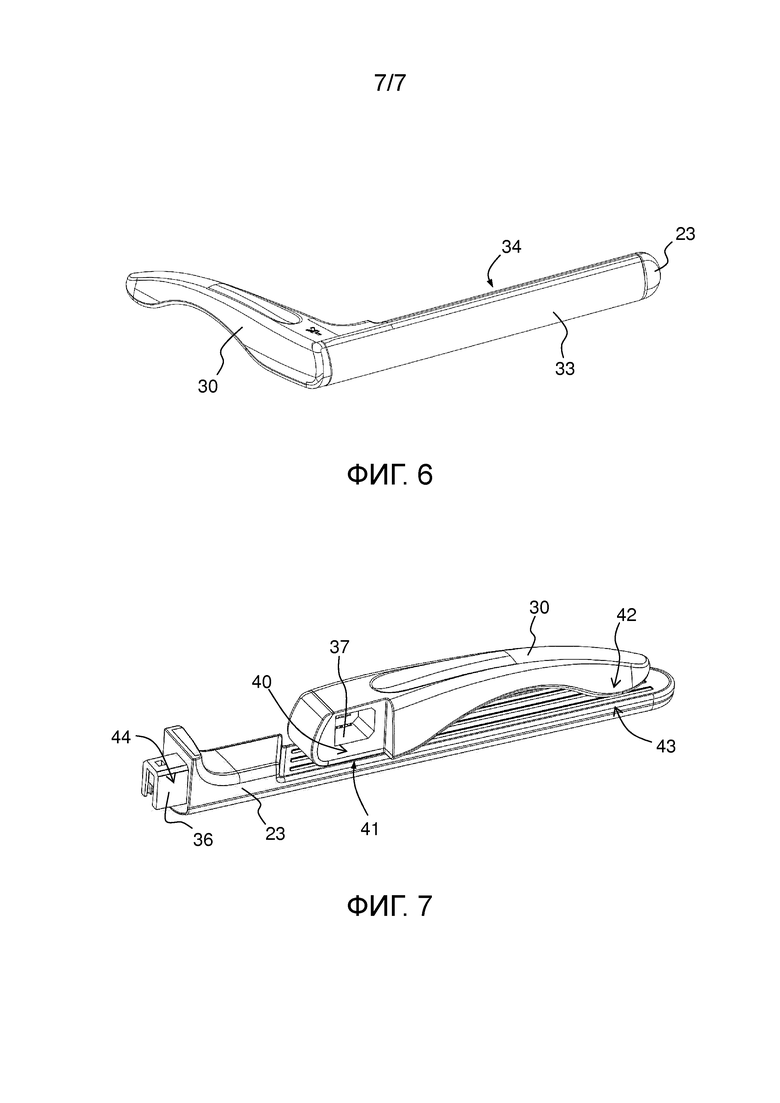
Фиг. 6 и 7 - вид инструмента отдельно, при этом на фиг. 6 инструмент показан в рабочем положении, а на фиг. 7 - в сложенном.
Для большей ясности одни и те же элементы будут иметь на разных фигурах одинаковые обозначения.
Заявленный инструмент можно применять для любого транспортное средства, перемещающегося относительно опорной плоскости, такой как земля. Транспортное средство может, например, перемещаться при помощи колеса или шарнирных ног. Транспортное средство содержит нижнюю плоскую поверхность, параллельную опорной плоскости, и инструмент позволяет поднимать эту поверхность, используя в качестве опоры опорную плоскость.
Изобретение находит свое применение для подъема робота-гуманоида 10, показанного на фиг. 1. Разумеется, заявленный инструмент можно использовать и для других типов транспортных средств.
Робот 10 содержит голову 1, туловище 2, две руки 3, две кисти 4 и юбку 7, позволяющую опустить центр тяжести робота и добиться, таким образом, хорошей устойчивости.
Робот содержит несколько шарниров, обеспечивающих относительное движение различных конечностей робота 10 с целью воспроизведения морфологии человека и его движений. Например, робот 10 содержит шарнир 11 между туловищем 2 и каждой из рук 3. Шарнир 11 выполнен моторно-подвижным вокруг двух осей вращения для обеспечения перемещения руки 3 относительно туловища 2 наподобие возможных перемещений, производимых при помощи плечевого сустава человека.
Юбка 7 содержит первый шарнир 12 наподобие коленного сустава между ногой 7а и бедром 7b. Второй шарнир 13, подобный тазобедренному суставу, установлен между туловищем 2 и бедром 7b. Оба шарнира 12 и 13 имеют моторно-поворотные связи вокруг оси вращения. Ось вращения Ха шарнира 12 и ось вращения Xb шарнира 13 по существу параллельны оси, соединяющей два плечевых сустава робота, и позволяют наклонять робот вперед или назад.
В своем основании юбка 7 содержит треногу 14, позволяющую перемещать робот 10. Тренога 14 содержит три колеса 15, 16 и 17, шарнирно соединенные с треногой. Пример колеса, которое можно применять, описан в патентной заявке, опубликованной под № FR 2 989 935 и поданной на имя заявителя. Колеса 15, 16 и 17 являются моторизованными и обеспечивают перемещение робота 10 во всех направлениях опорной плоскости.
На фиг. 2а и 2b в сечении по вертикальной плоскости показаны тренога 14 и инструмент 20, позволяющий поднимать ее относительно горизонтальной опорной плоскости 21. Тренога 14 имеет нижнюю горизонтальную поверхность 22, параллельную опорной плоскости 21. Инструмент 20 должен опираться на опорную плоскость 21, чтобы поднять поверхность 22 и, следовательно, весь робот 10. Инструмент 20 позволяет приподнимать колеса относительно опорной плоскости 21. Оператор вводит инструмент 20 под треногу 14 между опорной плоскостью 21 и поверхностью 22 вблизи одного из колес, например колеса 15, как показано на фиг. 2а и 2b. Инструмент 20 выполнен в виде моноблочной детали, содержащей плечо 23, проходящее в основном вдоль главной оси 24, перпендикулярной к плоскости фиг. 2а и 2b. Инструментом 20 управляет оператор по существу поворотным движением вокруг главной оси 24 плеча 23.
На фиг. 2а все колеса 15, 16 и 17 входят в контакт с опорной плоскостью 21, а на фиг. 2b колесо 15 приподнято. Между положениями, показанными на этих двух фигурах, плечо 23 повернулось вокруг своей главной оси 24 примерно на 90°.
На фиг. 3 показано плечо 23 в разрезе по плоскости, перпендикулярной к его главной оси 24. Чтобы поднять треногу 14, плечо 23 имеет особую форму. В частности, в сечении плеча 23, перпендикулярном к главной оси 24, определяют два габаритных расстояния D1 и D2, смещенные относительно друг друга в угловом направлении. Первое расстояние D1 меньше второго расстояния D2. Расстояния D1 и D2 определяют в зависимости от расстояния D, отделяющего опорную плоскость 21 от поверхности 22, когда все три колеса опираются на опорную плоскость 21. Это расстояние D представляет собой клиренс робота 10. Расстояние D перпендикулярно к опорной плоскости 21. Расстояние D1 меньше расстояния D, а расстояние D2 превышает расстояние D. Таким образом, оператор может ввести плечо 23 под поверхность 22, сохраняя при этом расстояние D по существу перпендикулярным к опорной плоскости 21. Разность между двумя расстояниями D1 и D позволяет свободно перемещать плечо 23 под роботом 10. Поворачивая плечо 23 вокруг его главной оси 24, оператор делает расстояние D2 перпендикулярным к опорной плоскости 21. Поскольку расстояние D2 больше клиренса, робот 10 приподнимается на уровне точки контакта между плечом 23 и поверхностью 22. Сечение плеча 23, в котором находятся расстояния D1 и D2, расположено вдоль главной оси 23 по длине, достаточной, чтобы приподнять робот 10.
Угловое смещение между двумя габаритными расстояниями D1 и D2 может быть любым, оставаясь при этом меньше 180°. В представленном примере расстояния D1 и D2 являются по существу перпендикулярными друг к другу.
Предпочтительно, чтобы улучшить устойчивость робота 10 во время его подъема, когда оператор поднимает робот 10, во время поворота плеча 23 можно провести робот 10 через верхнюю точку и опять слегка опустить его ниже верхней точки, избегая, чтобы робот 10 не упал на свои колеса под действием веса. Для этого в сечении плеча, в котором определены расстояния D1 и D2, определяют третье габаритное расстояние Dmax, смещенное в угловом направлении от расстояния D1 в меньшей степени, чем расстояние D2. Расстояние Dmax превышает расстояние D2.
Углы смещения между расстояниями показаны на фиг. 3. Угол αm разделяет оси расстояний D1 и Dmax, а угол α2 разделяет оси расстояний D1 и D2.
Можно еще больше улучшить устойчивость робота 10 в приподнятом положении. Для этого сечение плеча 23 имеет две плоскости поверхности 27 и 28, отстоящие друг от друга на расстояние D2. Плоская поверхность 28 предназначена для вхождения в контакт с опорной плоскостью 21, а плоская поверхность 27 предназначена для вхождения в контакт с поверхностью 22 робота 10.
На фиг. 4 показана кривая, отображающая характер изменения текущего расстояния d в зависимости от угла α поворота плеча 23. При нулевом значении угла расстояние D1 меньше расстояния D. Расстояние d увеличивается между нулевым углом α и углом αm. Расстояние d уменьшается между углами αm и α2. Наконец, расстояние d увеличивается сверх значения угла α2. Это новое увеличение связано с присутствием двух плоских поверхностей 27 и 28. Устойчивости робота в приподнятом положении добиваются, когда расстояние d достигает минимума, в данном случае расстояние D2, полученное при угле α2.
Плечо 23 может иметь на одном из своих концов форму, позволяющую поворачивать его вокруг его главной оси 24. Речь может идти о квадратном или шестиугольном сечении, на которое оператор может устанавливать приводной ключ. В альтернативном варианте инструмент 20 содержит ручку 30, обеспечивающую в рабочем положении поворот плеча 23 вокруг его главной оси 24. Предпочтительно ручка 30 расположена по существу перпендикулярно к плечу 23. Ручка 30 позволяет оператору поворачивать плечо 23 вокруг его главной оси 24.
Инструмент 20, содержащий плечо 23 и ручку 30, показан на фиг. 5а и 5b. В положении на фиг. 5а плечо 23 может свободно проходить под поверхностью 22 робота 10. Расстояние D1 перпендикулярно к опорной плоскости 21. Инструмент 20 находится в положении, показанном на фиг. 2а. На фиг. 5b инструмент находится в положении, показанном на фиг. 2b. Расстояние D2 перпендикулярно к опорной плоскости 21. Между положениями инструмента 20, показанными на фиг. 5а и 5b, оператор повернул плечо на угол α2 при помощи ручки 30.
Предпочтительно в положении, показанном на фиг. 5b, ручка 30 опирается на опорную плоскость 21. Можно не использовать плоские поверхности 27 и 28. Кривая, показанная на фиг. 4, может понижаться с превышением угла αm, и это понижение может продолжаться до перехода через угол α2. Положение устойчивости инструмента 20 обеспечивается, когда ручка 30 опирается на опорную плоскость 21. Уменьшение текущего расстояния d прекращается, когда ручка 30 входит в контакт с опорной плоскостью 21.
Во время использования инструмент 20 входит в контакт одновременно с опорной плоскостью 21 и с плоской поверхностью 22. При повороте плеча 23 вокруг его главной оси 24 на уровне контактов появляются тангенциальные усилия. Эти усилия могут привести либо к перемещению робота 10 параллельно опорной плоскости 21, либо к проскальзыванию на уровне одного из контактов. Перемещение робота 10 относительно опорной плоскости 21 является нежелательным. Инструмент 20 можно выполнить таким образом, чтобы ограничить риск перемещения, и предпочтительно выбрать контакт, который может быть скользящим.
Для этого относительно плоскости 32, содержащей главную ось 24, наружные поверхности 33 и 34 плеча 23, находящиеся с двух сторон от плоскости 32, имеют разные коэффициенты трения. Наименьший коэффициент трения выбирают для поверхности, на уровне которой должно происходить скольжение.
Опорная плоскость 21 может быть самой разной. Речь идет о земле, и оператор может принимать решение о подъеме робота 10 на разных типах поверхности земли. С другой стороны, поверхность 22 для робота 10 и поверхность 34 для плеча 23 являются контролируемыми. Можно выбрать поверхность с наибольшим коэффициентом трения для вхождения в контакт с роботом 10, в данном случае поверхность 34, и поверхность с наименьшим коэффициентом трения для вхождения в контакт с опорной плоскостью, в данном случае поверхность 33. Например, можно накрыть поверхность 34 накладкой из резины или из материала на основе силикона. Поверхность 33 можно накрыть накладкой из материала с хорошим скольжением, например, такого как политетрафторэтилен (ПТФЭ).
Предпочтительно ручка 30 выполнена съемной относительно плеча 23, чтобы облегчить складывание инструмента 20. Инструмент 20 отдельно показан на фиг. 6 и 7. На фиг. 6 показана ручка 30, соединенная с плечом 23 в относительном рабочем положении, называемом также смонтированным положением, позволяющим поднимать робот 10, и на фиг. 7 ручка 23 показана в сложенном положении, называемом демонтированным положением относительно плеча 23. В положении, показанном на фиг. 7, ручка 30 расположена параллельно главной оси 24 плеча 23. Предпочтительно инструмент 20 содержит средства удержания ручки относительно инструмента в сложенном положении. Чтобы ограничить габарит, эти средства удержания могут представлять собой один или несколько постоянных магнитов 40 и 42, установленных в ручке 30. При этом плечо 23 содержит включение одного или нескольких магнитных элементов 41 и 43, каждый из которых выполнен из ферромагнитного материала или представляет собой постоянный магнит, расположенный таким образом, чтобы обеспечивать взаимное притяжение ручки 30 и плеча 23 в сложенном положении. В целом ручка 30 и плечо 23 содержат магнитные элементы 40-43, взаимодействующие между собой для удержания ручки 30 и плеча 23 в сложенном положении.
В роботе 10 можно предусмотреть чехол для хранения сложенного инструмента.
Пример форм, обеспечивающих приведение в движение плеча 23 при помощи ручки 20, показан на фиг. 7. Плечо 23 может содержать охватываемый квадрат 36, а ручка 30 может содержать охватывающий квадрат 37, выполненный с возможностью взаимодействия с квадратом 36 для поворота плеча 23. Квадрат 36 расположен вдоль главной оси 24, и введение охватываемого квадрата 36 в охватывающий квадрат 37 осуществляют поступательным перемещением вдоль главной оси 24. Каждый из двух квадратов может содержать обрезанную грань, обеспечивающую правильную установку в относительном рабочем положении ручки 30 относительно плеча 23. Удержание в ручки 30 в рабочем положении относительно плеча 23 обеспечивают магнитные элементы (ферромагнитный элемент или постоянный магнит), расположенные к квадратах 36 и 37. Предпочтительно один из магнитных элементов позволяет удерживать ручку 30 и плечо 23 как в сложенном положении, так и в рабочем положении. Например, магнитный элемент 40, расположенный в ручке 30, может взаимодействовать в рабочем положении с магнитным элементом 44, расположенным в квадрате 36. При этом магнитный элемент 41 выполняет двойную функцию, взаимодействуя либо с магнитным элементом 41 в сложенном положении, либо с магнитным элементом 44 в рабочем положении.
Изобретение относится к устройствам для подъема транспортных средств. Инструмент (20) выполнен в виде моноблочной детали, содержащей плечо (23), проходящее в основном вдоль главной оси (24), которое располагают между транспортным средством (10) и опорной плоскостью (21) и которым управляет оператор по существу поворотным движением вокруг главной оси (24) плеча (23). В сечении плеча (23), перпендикулярном к главной оси (23) и расположенном вдоль главной оси (24), определяют два габаритных расстояния D1 и D2, смещенные в угловом направлении относительно друг друга. Первое расстояние D1 меньше второго расстояния D2, при этом расстояние D1 должно быть меньше расстояния D, отделяющего транспортное средство (10) от опорной плоскости (21), и расстояние D2 должно превышать расстояние D. Достигается упрощение конструкции. 7 з.п. ф-лы, 9 ил.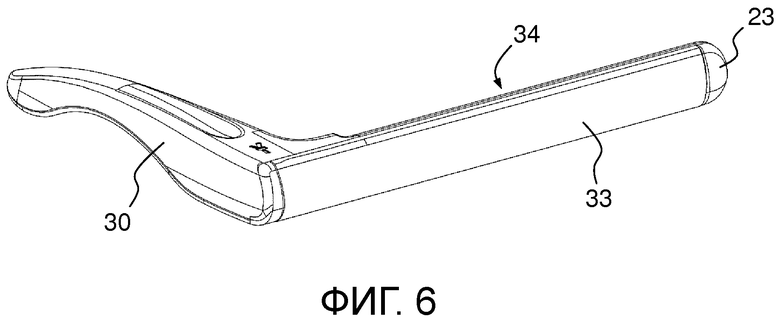
1. Инструмент (20), предназначенный для подъема транспортного средства (10) относительно опорной плоскости (21), по которой должно перемещаться транспортное средство (10), при этом инструмент выполнен в виде моноблочной детали, содержащей плечо (23), проходящее в основном вдоль главной оси (24), которое располагают между транспортным средством (10) и опорной плоскостью (21) и которым управляет оператор по существу поворотным движением вокруг главной оси (24) плеча (23), при этом в сечении плеча (23), перпендикулярном к главной оси (23) и расположенном вдоль главной оси (24), определяют два габаритных расстояния D1 и D2, смещенные в угловом направлении относительно друг друга, при этом первое расстояние D1 меньше второго расстояния D2, при этом расстояние D1 должно быть меньше расстояния D, отделяющего транспортное средство (10) от опорной плоскости (21), и расстояние D2 должно превышать расстояние D, при этом инструмент содержит съемную ручку (30) плеча (23), обеспечивающую в смонтированном положении поворот плеча (23) вокруг его главной оси (24), отличающийся тем, что ручка (30) и плечо (23) содержат магнитные элементы (40,41,42), взаимодействующие между собой для удержания ручки (30) и плеча (23) в демонтированном положении.
2. Инструмент по п. 1, отличающийся тем, что два габаритных расстояния D1 и D2 по существу перпендикулярны друг к другу.
3. Инструмент по одному из пп. 1, 2, отличающийся тем, что в сечении плеча (23) определяют третье габаритное расстояние Dmax, смещенное в угловом направлении от расстояния D1 в меньшей степени, чем расстояние D2, и тем, что расстояние Dmax превышает расстояние D2.
4. Инструмент по одному из пп. 1-3, отличающийся тем, что сечение плеча (23) имеет две плоские поверхности (27,28), отстоящие друг от друга на второе расстояние D2.
5. Инструмент по одному из пп. 1-4, отличающийся тем, что относительно плоскости (32), содержащей главную ось (24), наружные поверхности (33,34) плеча (23), находящиеся с двух сторон от плоскости (32), имеют разные коэффициенты трения.
6. Инструмент по п. 5, отличающийся тем, что поверхность (34) с наибольшим коэффициентом трения предназначена для вхождения в контакт с транспортным средством (10), и поверхность (33) с наименьшим коэффициентом трения предназначена для вхождения в контакт с опорной плоскостью (21).
7. Инструмент по одному из пп. 1-6, отличающийся тем, что в смонтированном положении ручка (30) расположена по существу перпендикулярно к плечу (23).
8. Инструмент по одному из пп. 1-7, отличающийся тем, что магнитные элементы (40) позволяют одновременно удерживать ручку(30) и плечо (23) с демонтированном положении и в смонтированном положении.
| US 6581784 B1, 24.06.2003 | |||
| US 4348010 A, 07.09.1982 | |||
| US 2009127522 A1, 21.05.2009 | |||
| US 6354570 B1, 12.10.2000 | |||
| МУЛЬТИПЛИКАТОР | 2003 |
|
RU2250193C1 |

