Изобретение относится к промышленным и сельскохозяйственным тракторам, погрузчикам, автогрейдерам, вездеходам и другим гусеничным и колесным самоходным машинам с электромеханической трансмиссией, предназначенным для выполнения землеройных, строительных, дорожных, транспортных, сельскохозяйственных и других работ.
Известна электромеханическая трансмиссия гусеничного трактора, содержащая двигатель внутреннего сгорания (тепловой двигатель), связанный с тяговым генератором, два тяговых электродвигателя, кинематически связанных с гусеницами противоположных бортов, и систему управления электрооборудованием. Тяговый генератор и тяговые электродвигатели выполнены синхронными, переменного тока. В состав системы управления электрооборудованием входят преобразователь и микропроцессорный контроллер верхнего уровня. Тяговые электродвигатели размещены параллельно в одном корпусе (BY 5907 U, B60K 17/00, B60L 11/00, 28.02.2010).
Применение синхронных электрических машин, которые реализуются с постоянными магнитами на роторе, предопределяет невысокую надежность трансмиссии ввиду возможности разрушения ротора из-за воздействия на магниты центробежных сил, невозможности работы трансмиссии при выходе из строя одной из фазных обмоток, а также повышенной сложности обмоток (секции обмоток этих электрических машин, как правило, охватывают несколько зубцов магнитопровода). Данная трансмиссия имеет также ограниченный диапазон бесступенчатого регулирования скорости, поскольку тяговые электродвигатели с постоянными магнитами на роторе имеют малую зону работы с постоянством мощности (отношение максимальной скорости к номинальной не более 1,5-2).
Известна также электромеханическая трансмиссия самоходной машины, содержащая тяговый генератор, соединенный с ДВС и выполненный с возможностью преобразования механической энергии ДВС в электрическую энергию, тяговые вентильно-индукторные электродвигатели (ВИД) с независимым возбуждением, приспособленные для преобразования электрической энергии в механическую, а также бортовые редукторы, связанные с тяговыми ВИД и приспособленные для привода ведущих колес самоходной машины (Лашкевич М.М. Разработка системы управления для электротрансмиссии с тяговыми вентильно-индукторными двигателями: дис. … канд. техн. наук: 05.09.03. - Москва: ФГБОУ ВПО «НИУ «МЭИ», 2013. - 155 с.).
Применение в трансмиссии ВИД с независимым возбуждением, известных также как одноименнополюсные индукторные электродвигатели с аксиальным возбуждением, позволяет обеспечить регулирование тягового усилия в более широком диапазоне скоростей движения самоходной машины путем изменения как фазных напряжений, так и тока возбуждения. Однако расширение зоны регулирования скорости при этом достигается за счет усложнения конструкции и снижения надежности трансмиссии.
В ВИД с независимым возбуждением реализуются многопакетные конструкции с обмоткой возбуждения, расположенной между соседними пакетами двигателя. Возможны две основные конструкции - с поднятой и опущенной обмоткой возбуждения. В первом случае обмотка возбуждения размещается вплотную к железу спинки статора (над обмотками фаз двигателя). Такую обмотку называют «поднятой обмоткой возбуждения». Во втором случае обмотка находится вблизи магнитопровода ротора и называется «опущенной».
Обмотка возбуждения, опущенная в область межпакетного пространства ротора, позволяет уменьшить габаритные размеры двигателя, однако существенно усложняет конструкцию и технологию сборки ВИД из-за трудностей закрепления обмотки возбуждения на статоре. Обусловлено это тем, что эта обмотка не может быть прикреплена к статору и выровнена так, чтобы она не прикасалась к ротору, до тех пор, пока ротор двигателя не продет в статор и не закреплен подшипниковыми щитами. «Вывешивание» обмотки возбуждения осуществляется, в частности, с помощью нескольких винтов. Этот процесс является сложным и трудоемким, поскольку касание обмоткой возбуждения железа ротора недопустимо, причем оценить качество «вывешивания» обмотки на практически собранном двигателе крайне сложно ввиду невозможности визуального контроля. В итоге это приводит к усложнению конструкции и снижению надежности ВИД и трансмиссии машины в целом.
Поток возбуждения, создаваемый кольцевой катушкой возбуждения, замыкается по аксиально-радиальному пути, проходя корпус статора, пакет статора, рабочий воздушный зазор, пакет ротора, вал ротора (либо втулку между пакетами ротора), второй пакет ротора, рабочий воздушный зазор и второй пакет статора (Лашкевич М.М. Разработка системы управления для электротрансмиссии с тяговыми вентильно-индукторными двигателями: дис. … кандидата технических наук: 05.09.03. - Москва: ФГБОУ ВПО «НИУ «МЭИ», 2013. - 155 с.). Однако существует и альтернативный путь для замыкания потока возбуждения - корпус статора, подшипниковый щит, подшипник, ротор, и обратно через второй подшипник и подшипниковый щит. Наличие паразитного пути замыкания потока возбуждения может приводить к преждевременному выходу из строя подшипников качения за счет вихревых токов, наводимых в шариках подшипника при вращении ротора. Поэтому в ВИД такого типа принимаются меры по разрыву альтернативного пути замыкания потока возбуждения - изготовление ротора и подшипникового щита из немагнитного материала (нержавеющая сталь), установка немагнитных вставок в подшипниковый щит и т.д. Это приводит к снижению надежности ВИД и трансмиссии в целом по причине усложнения конструкции ВИД и меньшей прочности немагнитных материалов по сравнению с конструкционной сталью.
Реактивный момент (момент при отсутствии возбуждения) в ВИД с независимым возбуждением, несмотря на явнополюсный ротор, практически отсутствует, поскольку величины индуктивностей обмоток отдельных фаз слабо зависят от угла поворота ротора. Это затрудняет реализацию бездатчикового инвертора тягового электродвигателя, особенно при его работе при неподвижном роторе и на низких частотах вращения, что также приводит к соответствующему усложнению конструкции инвертора (контроллера) и снижению надежности трансмиссии в целом.
Более высокую надежность имеет электромеханическая трансмиссии, которая является наиболее близкой к предложенной и содержит двигатель внутреннего сгорания (ДВС), электрические машины, электронные контроллеры (коммутаторы, инверторы), силовые шины, накопитель электрической энергии и блок управления. Одна электрическая машина кинематически соединена с ДВС, а прочие электрические машины (тяговые электродвигатели) кинематически соединены с тяговыми устройствами. Блок управления подключен к электронным контроллерам (коммутаторам, инверторам), а накопитель электрической энергии - к силовым шинам. В качестве электрических машин применены реактивные индукторные машины с самовозбуждением и с зубчатыми пассивными ферромагнитными роторами. Во время работы электрических машин электронные коммутаторы (контроллеры) подключают к силовым шинам их фазные обмотки (обмотки якоря), которые выполнены в виде сосредоточенных катушек, размещенных на полюсах статора (RU 2376158 С2, B60K 17/00, H02P 8/00, 20.12.2009).
Недостатком этой трансмиссии является малый диапазон регулирования скорости движения самоходной машины, что обусловлено применением ВИД с самовозбуждением традиционной топологии.
Отсутствие в этих ВИД обмотки возбуждения предопределяет невозможность изменения скорости путем изменения тока возбуждения, как это было реализовано в предыдущем техническом решении.
Увеличению тяговой мощности при низких скоростях движения самоходной машины в этой трансмиссии препятствует относительно небольшая величина максимального крутящего момента ВИД, ограниченная величиной максимального выходного тока электронного коммутатора обмоток фаз (контроллера) и насыщением магнитопроводов статора и ротора.
При движении самоходной машины на высокой скорости и, соответственно, при высокой скорости вращения ротора ВИД, нарастанию тока в обмотках фаз препятствует их индуктивность, что также приводит к снижению выходного момента ВИД и тяговой мощности электромеханической трансмиссии.
Соответственно, диапазон регулирования скорости движения самоходной машины с известной электромеханической трансмиссией ограничен возможностями ВИД с самовозбуждением традиционной конфигурации и является относительно небольшим из-за отсутствия в этой трансмиссии реализации технических решений, направленных на повышение выходного момента тяговых электродвигателей на границах этого диапазона.
Задачей, решаемой изобретением, является создание электромеханической трансмиссии с расширенным диапазоном бесступенчатого регулирования скорости движения самоходной машины при одновременном обеспечении необходимого уровня тяговой мощности и высокой надежности работы этой трансмиссии.
В данном случае под необходимым уровнем тяговой мощности подразумевается величина этой мощности, при которой обеспечивается возможность движения самоходной машины на любой скорости в пределах диапазона скоростей ее движения, а расширение этого диапазона подразумевает увеличение тягового усилия электромеханической трансмиссии при максимальной и минимальной скоростях движения самоходной машины, определяющих границы этого диапазона.
В электромеханической трансмиссии самоходной машины, содержащей тяговый генератор, связанный с двигателем внутреннего сгорания (ДВС) и осуществляющий преобразование механической энергии ДВС в электрическую энергию, передаваемую на силовые шины непосредственно от тягового генератора или через силовой выпрямитель, тяговые электродвигатели, бортовые редукторы, приспособленные для привода ведущих колес или гусениц самоходной машины и связанные с тяговыми электродвигателями непосредственно или через передаточные устройства, а также систему управления, в состав которой входит по меньшей мере один орган управления и по меньшей мере один контроллер, соединенный с силовыми шинами и выполненный с возможностью управления тяговым генератором и/или по меньшей мере одним тяговым электродвигателем, причем по меньшей мере один тяговый генератор и/или тяговый электродвигатель выполнен с безобмоточным ротором и зубчатым статором, на каждом зубце статора размещена зубцовая катушка, а каждую фазу составляет четное число зубцовых катушек, соединенных между собой последовательно и/или параллельно, указанный технический результат достигается за счет того, что в этой электромеханической трансмиссии дополнительно реализовано по меньшей мере одно из следующих технических решений:
- по меньшей мере один тяговый электродвигатель имеет числа зубцов статора и ротора, выбранные из условия реализации тягового электродвигателя с различным количеством фаз, а контроллер выполнен с возможностью изменения количества фаз в процессе работы самоходной машины путем изменения алгоритма подключения к силовым шинам зубцовых катушек, таким образом, что при снижении скорости движения самоходной машины или скорости вращения ротора тягового электродвигателя осуществляется увеличение количества его фаз;
- тяговый генератор и/или по меньшей мере один тяговый электродвигатель выполнен с комбинированным независимым электромагнитным и магнитоэлектрическим возбуждением, при этом его статор содержит постоянные магниты и обмотку возбуждения, подключенную к источнику тока возбуждения, выполненному в виде составной части контроллера или в виде отдельного устройства системы управления, соединенного с контроллером по цепям питания и/или управления;
- по меньшей мере один тяговый электродвигатель реализован с количеством фаз больше трех, а контроллер выполнен с возможностью изменения алгоритма коммутации зубцовых катушек этих фаз в зависимости от скорости движения самоходной машины или скорости вращения ротора таким образом, что при уменьшении этой скорости осуществляется увеличение количества фаз, зубцовые катушки которых в каждый момент времени подключены к силовым шинам, причем это подключение синхронизировано с углом поворота ротора и реализовано, в случае необходимости, с ограничением тока каждой фазы в режиме импульсной модуляции;
- контроллер приспособлен для управления тяговым генератором и/или силовым выпрямителем из условия увеличения напряжения на силовых шинах при увеличении скорости движения самоходной машины и/или скорости вращения ротора по меньшей мере одного тягового электродвигателя;
- электромеханическая трансмиссия содержит систему жидкостного охлаждения тягового генератора, и/или по меньшей мере одного тягового электродвигателя, и/или по меньшей мере одного контроллера с регулируемым циркуляционным насосом, а контроллер выполнен с возможностью прямого или косвенного измерения мощности потерь в тяговом генераторе и/или по меньшей мере в одном тяговом электродвигателе, и/или выходной мощности тягового генератора, и/или момента или мощности по меньшей мере одного тягового электродвигателя, и/или температуры по меньшей мере одной составной части электромеханической трансмиссии, и/или температуры охлаждающей жидкости, а также с возможностью управления циркуляционным насосом из условия увеличения скорости или потока охлаждающей жидкости при увеличении по меньшей мере одного из указанных измеряемых параметров;
- обмотки статора тяговых электродвигателей выполнены с коэффициентом заполнения пазов медью более 0,5.
В частных вариантах реализации изобретения, с целью дальнейшего улучшения характеристик электромеханической трансмиссии, в том числе расширения диапазона бесступенчатого регулирования скорости движения самоходной машины, в предложенной электромеханической трансмиссии:
- тяговые электродвигатели выполнены с 12 зубцами статора и с 10-ю зубцами ротора, а контроллер обеспечивает их переключение с 3-фазной на 6-фазную конфигурацию в случае получения команды на изменение количества фаз или при выявлении снижения скорости вращения ротора или скорости движения самоходной машины ниже предварительно установленной величины, записанной в памяти контроллера;
- контроллер обеспечивает формирования постоянного, переменного или импульсного тока возбуждения тягового генератора и/или по меньшей мере одного тягового электродвигателя в зависимости от положения и/или скорости вращения его ротора, и/или скорости движения самоходной машины, и/или выходного напряжения тягового генератора, и/или напряжения на силовых шинах, и/или нагрузки тягового электродвигателя, причем это формирование осуществляется, в частности, из условия формирования тяговой характеристики самоходной машины гиперболического вида с обеспечением минимально возможного изменения тяговой мощности при изменении скорости движения самоходной машины или скорости вращения ротора по меньшей мере одного тягового электродвигателя;
- контроллер приспособлен для управления тяговым генератором и/или силовым выпрямителем из условия увеличения напряжения на силовых шинах при увеличении скорости движения самоходной машины и/или скорости вращения ротора по меньшей мере одного тягового электродвигателя, если текущее значение этой скорости меньше величины, заданной оператором самоходной машины с помощью органа управления, соединенного с контроллером;
- согласующее устройство между тяговым генератором и ДВС выполнено в виде упругой муфты и/или мультипликатора (повышающего редуктора);
- тяговый генератор содержит встроенный силовой выпрямитель, а тяговые электродвигатели - встроенные контроллеры;
- передаточное устройство, связывающее тяговый электродвигатель с бортовыми редукторами, содержит главную передачу и бортовые фрикционы, либо количество тяговых электродвигателей в трансмиссии устанавливается равным количеству гусениц или ведущих колес самоходной машины, причем эти электродвигатели обеспечивают независимый привод каждой гусеницы или каждого колеса;
- по меньшей мере один контроллер содержит силовой преобразователь на транзисторах IGBT и устройство управления этими транзисторами, в состав которого входят гальванически развязанные драйверы этих транзисторов, микроконтроллер или цифровой сигнальный процессор и интерфейсные устройства, приспособленные для обмена информацией с этим контроллером по сети CAN (Controller Area Network - сеть контроллеров) и/или LIN (Local Interconnect Network - локальная сеть).
Реализация любого из указанных альтернативных отличительных признаков независимого пункта формулы данного изобретения, а также одновременная реализации любого количества этих признаков в их любых комбинациях (сочетаниях), приводит к расширению диапазона бесступенчатого регулирования скорости движения самоходной машины при одновременном обеспечении необходимого уровня тяговой мощности и высокой надежности работы трансмиссии, т.е. обеспечивает достижение одного и того же технического результата.
В частности, благодаря реализации отличительных признаков, заключающихся в выборе чисел зубцов статора и ротора тяговых электродвигателей из условия реализации этих электродвигателей с различным количеством фаз в сочетании с изменением алгоритма коммутации зубцовых катушек при изменении скорости движения самоходной машины или скорости вращения роторов тяговых электродвигателей, обеспечивает расширение диапазона бесступенчатого регулирования скорости движения самоходной машины в сторону как более низких, так и более высоких скоростей. Это обусловлено тем, что тяговые электродвигатели с повышенным числом фаз имеют более высокий крутящий момент и, соответственно, более высокую мощность при работе в диапазоне низких скоростей вращения ротора, а тяговые электродвигатели с меньшим числом фаз имеют более высокий крутящий момент и более высокую мощность при работе в диапазоне высоких скоростей вращения ротора.
Реализация отличительных признаков, заключающихся в применении комбинированного независимого электромагнитного и магнитоэлектрического возбуждения тягового генератора и тяговых электродвигателей также обеспечивает одновременное расширение диапазона бесступенчатого регулирования скорости движения самоходной машины в сторону более низких и более высоких скоростей. Обусловлено это возможностью ослабления/увеличения тока возбуждения и, соответственно, изменения характеристик тягового генератора и тяговых электродвигателей в зависимости от скорости вращения их роторов или скорости движения самоходной машины. В этом случае повышенное значение тока возбуждения обеспечивает повышенное значение крутящего момента тяговых электродвигателей в диапазоне низких скоростей, а пониженное значение этого тока позволяет получить более высокий крутящий момент и более высокую тяговую мощность трансмиссии в диапазоне высоких скоростей. При этом тяговый генератор и тяговые электродвигатели не содержат «опущенных» или «поднятых» обмоток возбуждения, технологичны в изготовлении, допускают большой перегрев и отличаются простотой отвода тепла от обмоток. Поэтому расширение диапазона регулирования скорости не приводит к снижению надежности трансмиссии.
Реализация альтернативных отличительных признаков в части применения тяговых электродвигателей с количеством фаз больше трех в сочетании с изменением алгоритма коммутации катушек этих фаз в зависимости от скорости движения самоходной машины или скорости вращения ротора обеспечивает расширение диапазона бесступенчатого регулирования скорости движения самоходной машины в сторону более низких скоростей за счет того, что при уменьшении этой скорости осуществляется увеличение количества фаз, катушки которых в каждый момент времени подключены к силовым шинам. Это приводит к увеличению крутящего момента тяговых электродвигателей и тяговой мощности трансмиссии в диапазоне низких скоростей.
Реализация отличительных признаков, характеризующихся повышением напряжения на силовых шинах при увеличении скорости движения самоходной машины и/или скорости вращения роторов тяговых электродвигателей обеспечивает расширение диапазона бесступенчатого регулирования скорости движения самоходной машины в сторону более высоких скоростей. Достигается это за счет того, что повышение напряжения на силовых шинах и, соответственно, напряжения на обмотках статоров тяговых электродвигателей, позволяет предотвратить снижение тяговой мощности трансмиссии, обусловленное снижением амплитуды токов в этих обмотках, вызванное индуктивностями этих обмоток и увеличением частоты следования импульсов напряжения на обмотках при увеличении частоты вращения роторов.
В случае реализации альтернативных отличительных признаков независимого пункта формулы изобретения, характеризующихся применением системы жидкостного охлаждения трансмиссии с регулируемым циркуляционным насосом, также обеспечивается расширение диапазона бесступенчатого регулирования скорости движения самоходной машины в сторону как более высоких, так и более низких скоростей. Обусловлено это тем, что в ранее известных трансмиссиях с жидкостным охлаждением расход теплоносителя имеет постоянную величину и выбирается из расчета отвода максимально возможной тепловой энергии в наиболее нагруженном режиме работы трансмиссии. Соответственно, в большинстве режимов работы трансмиссии этот расход является избыточным, что приводит к повышенному отбору мощности на привод циркуляционного насоса и к соответствующему снижению тяговой мощности трансмиссии. В отличие от этого, в предложенном техническом решении, благодаря оптимизации расхода охлаждающей жидкости (теплоносителя) обеспечивается снижение отбора мощности при движении машины как на низкой, так и на высокой скорости. Благодаря этому та часть мощности ДВС, которая в известных трансмиссиях расходовалась на привод циркуляционного насоса, в данном изобретении преобразуется в электрическую энергии и далее поступает на ведущие колеса или гусеницы самоходной машины.
Реализация обмоток статора тяговых электродвигателей с коэффициентом заполнения пазов медью более 0,5 (более 50%) при сохранении прочих параметров тяговых электродвигателей, в том числе величин токов в этих обмоток, позволяет снизить площадь пазов зубчатого статора, занимаемых этими обмотками. Уменьшение площади пазов дает возможность изменить конфигурацию зубцовой зоны тяговых электродвигателей, а именно, увеличить диаметр ротора тяговых электродвигателей и, соответственно их крутящий момент, поскольку этот момент пропорционален квадрату диаметра ротора, причем на всех скоростях его вращения. Одновременно сокращается длина силовых магнитных линий в магнитопроводе статора. Поэтому реализация этого альтернативного отличительного признака обеспечивает расширение диапазона бесступенчатого регулирования скорости движения самоходной машины в сторону как более высоких, так и более низких скоростей.
При реализации любого альтернативного отличительного признака изобретения расширение диапазона бесступенчатого регулирования скорости движения самоходной машины достигается без снижения тяговой мощности трансмиссии в середине рабочего диапазона скоростей. Увеличение тяговой мощности на максимальной и минимальной рабочей скорости или, что эквивалентно, расширение диапазона скоростей движения самоходной машины, не приводит к снижению тяговой мощности трансмиссии на какой-либо промежуточной скорости. Реализация этих отличительных признаков не приводит также к снижению надежности трансмиссии.
Поэтому отличительные признаки независимого пункта формулы изобретения находятся в прямой причинно-следственной связи с достигаемым техническим результатом.
Наилучший технический результат достигается при одновременной реализации всех указанных альтернативных отличительных признаков независимого пункта формулы изобретения. Однако этот результат достигается и при реализации как одного (любого) отличительного признака, так и одновременно нескольких альтернативных отличительных признаков в их любом сочетании.
Дополнительно влияние отличительных признаков изобретения на достигаемый технический результат показано ниже при описании примеров реализации предложенной электромеханической трансмиссии.
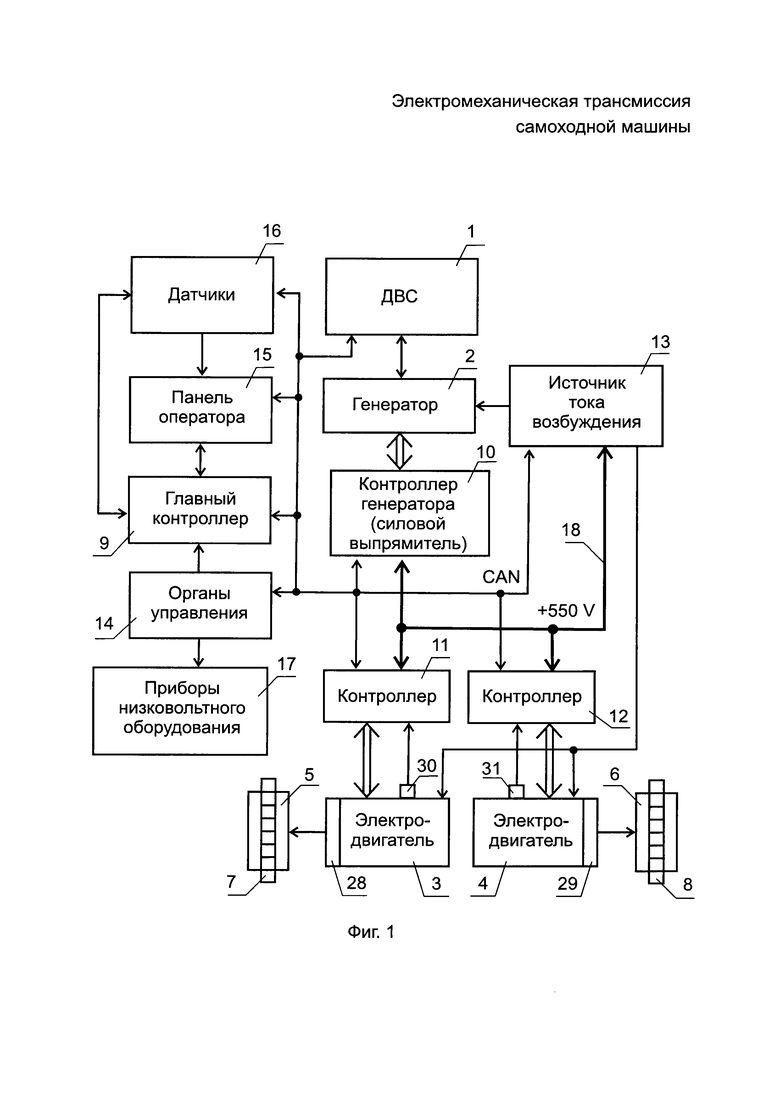
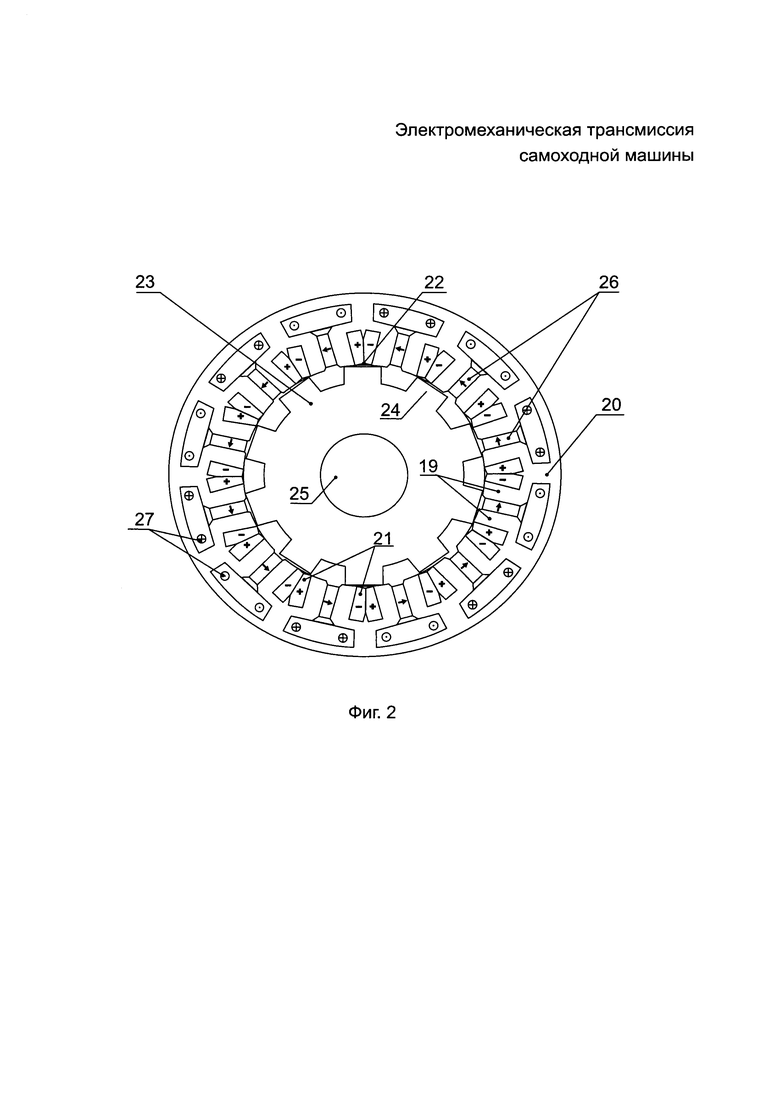
На фиг. 1 в качестве одного из возможных вариантов реализации предложенного устройства показана упрощенная схема электромеханической трансмиссии гусеничной самоходной машины. На фиг. 2 - пример активной части тягового генератора и тяговых электродвигателей с комбинированным независимым электромагнитным и магнитоэлектрическим возбуждением.
Роль первичного источника энергии выполняет приводной двигатель 1, выполненный, как правило, в виде двигателя внутреннего сгорания (ДВС).
В приведенном примере используется последовательная кинематическая схема моторно-трансмиссионной установки машины, которая исключает механическую связь ДВС с гусеничным движителем. ДВС непосредственно или через согласующее устройство, выполненное в виде упругой муфты и/или мультипликатора, соединен с тяговым генератором 2, который является источником электрической энергии для двух тяговых электродвигателей 3 и 4, соединенных с бортовыми редукторами 5, 6.
На бортовых редукторах закреплены ведущие колеса (звездочки) 7, 8 гусеничного движителя.
Система управления электромеханической трансмиссией, которая может именоваться также системой контроля, защиты и управления, системой электрооборудования и т.д., в общем случае включает в себя высоковольтную и низковольтную части этой системы и содержит один или несколько контроллеров, в частности, главный (ведущий) контроллер 9, контроллер 10 тягового генератора 2, два контроллера 11, 12 тяговых электродвигателей 3, 4, источник тока возбуждения 13 (в случае применения тягового генератора и/или тяговых электродвигателей с комбинированным независимым электромагнитным и магнитоэлектрическим возбуждением), органы управления движением машины (трансмиссией) 14, панель оператора (тракториста, водителя) 15, датчики параметров работы трансмиссии и машины в целом 16 и приборы низковольтного оборудования (электроснабжения, освещения, звуковой сигнализации и т.д.) 17 и другие устройства, условно не показанные на чертеже.
Контроллеры могут именоваться также блоками управления, управляющими устройствами, блоками входов и нагрузок, информационно-управляющими блоками или устройствами и т.д., что не имеет принципиального значения.
Контроллер 10 тягового генератора 2 выполняет функции силового выпрямителя и преобразует выходное напряжение тягового генератора 2 в постоянное напряжение силовых шин трансмиссии 18, например, 550 В.
К силовым шинам постоянного тока 18 может быть подключен накопитель энергии, выполненный на основе аккумуляторов и/или конденсаторов, а также последовательно соединенные тормозной резистор и силовой ключ, обеспечивающий подключение тормозного резистора к силовым шинам в случае, если напряжение на них превышает максимально допустимую величину.
Контроллеры 11 и 12 осуществляют преобразование постоянного напряжения силовых шин 18 в переменное напряжение или однополярные импульсы, которые подаются на обмотки тяговых электродвигателей 3, 4. Они выполнены в виде силовых преобразователей на транзисторах IGBT и содержат гальванически развязанные драйверы этих транзисторов, микроконтроллеры или цифровые сигнальные процессор, а также интерфейсные устройства, приспособленные для обмена информацией с этими контроллерами.
В зависимости от выполняемых функций и требований к компоновке самоходной машины возможно как объединение контроллеров 9-12 и источника тока возбуждения 13 в единый блок (контроллер, модуль), так и их раздельное исполнение. Возможно также конструктивное объединение контроллера генератора (силового выпрямителя) 10 с тяговым генератором 1, а контроллеров 11, 12 - с тяговыми электродвигателями 3, 4.
Линии передачи информационных сигналов между контроллерами выполнены с использованием стандарта промышленной сети CAN (Controller Area Network - сеть контроллеров), ориентированной на объединение в единую сеть различных устройств с использованием последовательного, широковещательного и пакетного режимов передачи. Возможно также применение интерфейсов LIN (Local Interconnection Network), RS-485 (стандарт EIA/TIA) и т.д., а также беспроводных интерфейсов типа ZigBee (стандарт IEEE 802.15.4), Wi-Fi (стандарт IEEE 802.11), Bluetooth (стандарт IEEE 802.15.1) и т.п.
Главный контроллер (ведущий контроллер, контроллер верхнего уровня) 9 осуществляет координацию работы всех компонентов электромеханической трансмиссии, в том числе реализует функции управления ДВС 1 непосредственно, либо через дополнительный контроллер двигателя, встроенный в него.
Тяговые электродвигатели 3, 4 выполнены с безобмоточным ротором и зубчатым статором.
Как показано на фиг.2, на каждом из 12-ти зубцов 19 статора 20 размещена зубцовая катушка 21, а каждую фазу составляет четное число зубцовых катушек, соединенных между собой последовательно и/или параллельно. Пассивный безобмоточный ротор отделен от статора немагнитным воздушным зазором 22 и имеет шихтованный магнитопровод 23 с 10-ю зубцами 24, закрепленный на валу 25.
Такие электродвигатели без обмотки возбуждения в русскоязычной литературе называются вентильными индукторными реактивными двигателями (ВРД, ВИД, ВИРД), а в англоязычной литературе - электродвигателями с переменным магнитным сопротивлением: «Switched Reluctance Motor (SRM)».
Обмотки статора тяговых электродвигателей могут выполнены с коэффициентом заполнения пазов медью более 0,5. В этом случае зубцовые катушки наматываются из прямоугольного провода, а пазы магнитопровода статора и зубцовые катушки имеют формы, позволяющие надеть на зубцы статора зубцовые катушки соседних фаз с минимальным зазором между ними.
Возможно также применение тягового генератора и тяговых электродвигателей с комбинированным независимым электромагнитным и магнитоэлектрическим возбуждением. В этом случае статор содержит постоянные магниты 26 и обмотку возбуждения 27. В приведенном на фиг.2 примере постоянные магниты 26 вставлены в каждый из 12-ти зубцов 19 статора 20, а обмотка возбуждения состоит из 12-ти катушек 27, соединенных между собой последовательно или параллельно. В англоязычной литературе такие электродвигатели называются электродвигателями с гибридным возбуждением: «Hybrid excitation flux switching motor (HEFSM)».
Обмотка возбуждения подключается к источнику тока возбуждения 13, выполненному в виде отдельного устройства, соединенного с одним из контроллеров по цепям питания и/или управления, как это показано на чертеже, либо в виде составной части какого-либо контроллера.
Тяговый генератор 2 может иметь конструкцию, аналогичную тяговым электродвигателям 3, 4, или отличающуюся от них.
Контроллер генератора (силовой выпрямитель) 10 обеспечивает выпрямление выходного напряжения тягового генератора 2, а также коммутацию обмоток при его работе в режиме электродвигателя при запуске ДВС и при работе в режиме торможения самоходной машины двигателем. В последнем случае контроллеры 11, 12 обеспечивают коммутацию обмоток тяговых электродвигателей 3, 4 при их работе в режиме генератора.
В тяговые электродвигатели 3, 4 или в бортовые редукторы 7, 8 могут быть встроены нормально замкнутые стояночные тормоза 28, 29, управление которыми осуществляется непосредственно главным контроллером 9 или контроллерами 11, 12 тяговых электродвигателей. Контроллеры обеспечивают включение стояночных тормозов для предотвращения скатывания самоходной машины под уклон, а также для ее торможения и остановки, если по каким-либо причинам интенсивность торможения тяговыми электродвигателями 3, 4 оказывается недостаточной.
Контроллеры 11 и 12 осуществляют управление тяговыми электродвигателям 3, 4 с возможностью изменения как скорости, так и направления движения самоходной машины. Альтернативным вариантом реализации трансмиссии машины является применение одного электродвигателя, главной передачи, устройства дифференциального управления, бортовых фрикционов и рабочих тормозов.
Органы управления 14 предназначены для формирования сигналов управления трансмиссией и включают в себя, по меньшей мере, один аппарат управления движением машины (джойстик), соединенный с главным контроллером 9, ключ запуска ДВС, клавишные и кнопочные переключатели, рукоятку управления подачей топлива, педали тормоза и десселератора.
Сигналы торможения самоходной машины могут формироваться аппаратом управления (джойстиком) путем установки его рукоятки в нейтральное положение, либо с помощью педали тормоза.
Контроллер 9 соединен также с панелью оператора 15, именуемую также панелью контрольно-измерительных приборов, комбинацией приборов, блоком индикации, блоком отображения информации и т.п. Она выполнена в виде набора электромеханических указателей, графической панели, световых сигнализаторов и т.п. и обеспечивает отображение параметров работы трансмиссии и машины в целом, а также формирование аварийных и предупредительных сигналов для оператора. Панель оператора 15 может быть выполнена в виде отдельного блока или совмещена с одним из контроллеров.
Для контроля параметров работы машины, в том числе ее трансмиссии, в состав системы управления входят датчики 16. К ним относятся датчики температуры и давления в трансмиссии и двигателе 1, датчики продольного и поперечного наклона машины (креномеры), положения машины (приемники сигналов GPS/ГЛОНАСС), тягового усилия машины, ускорения, угловых скоростей роторов тяговых электродвигателей 30, 31 и другие датчики.
Предельно допустимые значения параметров работы трансмиссии и рабочего оборудования самоходной машины предварительно определяются расчетным или экспериментальным путем при проектировании самоходной машины и записываются в память контроллеров 9-12 и/или панели оператора 15.
Предложенная электромеханическая трансмиссия самоходной машины работает следующим образом.
Оператор при помощи органов управления 14 задает рабочую скорость и направление движения самоходной машины.
ДВС 1 непосредственно или через согласующий редуктор/мультипликатор приводит во вращение ротор тягового генератора 2. Его выходное напряжение переменного тока с помощью силового выпрямителя (контроллера генератора) 10 преобразуется в напряжение постоянного тока +Uc, -Uc на силовых шинах 18, которое поступает на контроллеры 11, 12 тяговых электродвигателей 3, 4.
Для самоходной машины предпочтительно иметь один силовой выпрямитель 10 на все тяговые электродвигатели, что позволяет обеспечить прямой обмен энергией между левым и правым бортами машины при ее маневрировании при соответствующем уменьшении поглощения энергии тормозным резистором и увеличении КПД трансмиссии.
Для каждого тягового электродвигателя устанавливается отдельный контроллер (инвертор, преобразователь, коммутатор) 11, 12. Возможна также установка нескольких контроллеров на один тяговый электродвигатель при дроблении мощности по секциям статора электродвигателя, либо установка общего контроллера на два тяговых электродвигателя.
Контроллеры 11, 12 преобразуют напряжение постоянного тока +Uc, -Uc силовых шин 18 в переменное напряжение или в однополярные импульсы регулируемой частоты и скважности, поступающие на обмотки (фазы) 21 тяговых электродвигателей 3, 4. Крутящий момент, создаваемый тяговыми электродвигателями, передается на бортовые редукторы 5, 6 и далее на ведущие звездочки 7, 8 и гусеницы самоходной машины, в результате чего осуществляется ее движение в соответствии с направлением и скоростью, выбранными оператором.
Каждый контроллер (инвертор, преобразователь, коммутатор) 11, 12 имеет высокопроизводительный встроенный микроконтроллер или цифровой сигнальный процессор, обеспечивающий прием сигналов управления и прямое цифровое управление электронными силовыми ключами, выполненными на IGBT транзисторах.
Контроллеры объединены локальной сетью CAN, LIN и т.п. и получают сигналы управления от главного (ведущего, системного) контроллера 9, непосредственно от органов управления 14 или от других устройств системы управления трансмиссией в зависимости от ее конструктивного исполнения.
Для правильной коммутации фаз тяговые электродвигатели 3, 4 требуют обратной связи по положению ротора. В общем случае для выполнения такого требования используются датчики положения ротора 30, 31, которые одновременно используются в качестве датчиков скорости вращения роторов. В случае, если крутящий момент каждого из тяговых двигателей 3, 4 относительно невелик, буксование машины отсутствует. В этом случае на основании скоростей вращения роторов тяговых электродвигателей контроллеры 11, 12 определяют скорость движения самоходной машины.
Возможна также реализация бессенсорных алгоритмов управления тяговыми электродвигателями, в частности, основанных на оценке потокосцепления, а также измерения действительной скорости движения самоходной машины с помощью одного из датчиков 16.
В первом варианте реализации электромеханической трансмиссии тяговые электродвигатели 3, 4 имеет числа зубцов статора и ротора, выбранные из условия реализации тяговых электродвигателей с различным количеством фаз. Например, 12 зубцов статора и 10 зубцов ротора или 24 зубца статора и 20 зубцов ротора. В этом случае контроллеры 11 и 12 обеспечивают переключение управления зубцовыми катушками с 3-фазной на 6-фазную конфигурацию тяговых электродвигателей в случае получения контроллерами 11, 12 команды на изменение количества фаз тяговых электродвигателей от главного (системного) контроллера 9 или в случае выявления контроллерами 11, 12 с помощью датчиков 30, 31 снижения скорости вращения роторов тяговых электродвигателей или скорости движения самоходной машины ниже предварительно установленной величины, записанной в памяти этих контроллеров. Благодаря этому трансмиссия обеспечивает повышенное тяговое усилие при низких скоростях движения самоходной машины и, соответственно, расширение нижней границы диапазона ее рабочей скорости. Улучшение тягово-скоростных характеристик трансмиссии на высоких скоростях при этом обеспечивается за счет уменьшения числа фаз при увеличении скорости движения самоходной машины.
В втором варианте реализации электромеханической трансмиссии тяговый генератор 2 и тяговые электродвигатели 3, 4 имеют обмотки возбуждения 27. В этом случае в исходном состоянии трансмиссии токи возбуждения тягового генератора и тяговых электродвигателей с помощью источника тока возбуждения 13, управляемого контроллером 9, устанавливаются на уровне, соответствующем максимальному КПД трансмиссии в номинальном режиме ее работы. При этом обеспечивается постоянство тяговой мощности самоходной машины в определенном (как правило, в 2…3-х кратном) диапазоне изменения скоростей ее движения.
Внутри этого диапазона рабочая скорость самоходной машины может регулироваться контроллерами 11, 12 в зависимости от положений органов управления 14 без изменения токов возбуждения.
При выходе за пределы этого диапазона при помощи контроллера 9 или отдельного источника тока возбуждения осуществляется изменение токов возбуждения тягового генератора 2 и тяговых электродвигателей 3, 4 из условия формирования тяговой характеристики самоходной машины гиперболического вида - стабилизации ее тяговой мощности в максимально широком диапазоне скоростей ее движения. А именно, в случае снижения скорости движения самоходной машины осуществляется увеличение тока возбуждения тяговых электродвигателей, что приводит к увеличению тягового усилия. Для увеличения скорости движения самоходной машины осуществляется снижение тока возбуждения тяговых электродвигателей.
В предложенной трансмиссии возможна реализация оптимального регулирования тока возбуждения тягового генератора 2 в зависимости от скорости движения и/или тяговой нагрузки машины, в частности, из условия достижения максимальной выходной мощности трансмиссии в зависимости от режима работы машины, выбранного оператором с помощью органов управления 14 - при заданной величине тяговой мощности, тягового усилия, или скорости движения машины. Величина тягового усилия машины при этом может быть вычислена на основании результатов измерения крутящих моментов тяговых электродвигателей 3, 4.
В случае, если мощности ДВС 1 недостаточно для поддержания заданной оператором скорости движения машины при текущем значении ее тягового усилия (сопротивления передвижению), то регулирование осуществляется из условия достижения скорости движения машины, максимально возможной в данных условиях.
Возможна также реализация оптимального взаимосвязанного управления токами возбуждения тягового генератора и тяговых электродвигателей с помощью контроллеров тяговых электродвигателей и ДВС по различным критериям в зависимости от заданного оператором режима работы самоходной машины - из условия достижения максимальной тяговой мощности самоходной машины, заданной величины скорости движения машины, заданной величины тяговой мощности машины или максимального КПД трансмиссии. В частности, из условия стабилизации или поддержания заданной величины тяговой мощности или скорости движения самоходной машины.
Алгоритмы взаимосвязанного и автоматизированного управления трансмиссией предварительно определяются расчетным или экспериментальным путем, записываются в память контроллера 9 и далее программно реализуются микроконтроллером, входящим в его состав.
В третьем варианте реализации электромеханической трансмиссии тяговые электродвигатели реализованы с количеством фаз больше трех, например, четырехфазными или пятифазными, а контроллеры 11, 12 осуществляют изменение алгоритмов коммутации катушек этих фаз в зависимости от скорости движения самоходной машины или скорости вращения роторов тяговых электродвигателей. А именно, при уменьшении этой скорости осуществляется увеличение количества фаз, катушки которых в каждый момент времени подключены к силовым шинам. Это подключение синхронизировано с углом поворота ротора и реализовано, в случае необходимости, с ограничением тока каждой фазы в режиме импульсной модуляции.
В четвертом варианте реализации электромеханической трансмиссии учитывается, что при движении самоходной машины с высокой скоростью мощность тяговых электродвигателей 3, 4 и, соответственно, тяговая мощность машины, может оказаться недостаточной, поскольку индуктивности обмоток зубцовых катушек 22 ограничивают скорость нарастания тока в обмотках. В этом случае, с целью для сохранения высокой тяговой мощности самоходной машины, с помощью датчика скорости машины, входящего в состав датчиков 16, или с помощи контроллеров 11, 12 выявляется повышенная скорость движения самоходной машины или повышенные скорости вращения роторов электродвигателей 3, 4 (при отсутствии буксования колес или гусениц эти параметры эквивалентны). Далее на контроллер генератора 10 и/или на источник тока возбуждения 13 предается управляющий сигнал об увеличения напряжения +Uc, -Uc на силовых шинах 18.
Электромеханическая трансмиссия в пятом варианте ее исполнения содержит систему жидкостного охлаждения ее силовых компонентов - тягового генератора, тяговых электродвигателей и контроллеров (подразумеваются сильноточные контроллеры). Причем циркуляционный насос выполнен регулируемым, а главный контроллер 9 или какой-либо иной контроллер обеспечивает управление этим насосом и соответствующее регулирование скорости (потока) охлаждающей жидкости (теплоносителя) таким образом, чтобы с одной стороны полностью исключить перегрев силовых компонентов трансмиссии, а с другой стороны максимально сократить величину отбора мощности ДВС на привод циркуляционного насоса. Алгоритм такого управления предварительно определен при проектировании трансмиссии и записан в памяти микроконтроллера, на основе которого реализован контроллер 9.
Указанный алгоритм реализуется программно в различных вариантах и предусматривает прямое или косвенное измерение (вычисление) различных рабочих параметров трансмиссии. В частности, возможно вычисление мощности потерь в тяговом генераторе и/или в тяговых электродвигателях, выходной мощности тягового генератора, выходного крутящего момента или выходной мощности тяговых электродвигателя. Для осуществления возможности таких вычислений контроллеры с помощью датчиков 16, 30, 31 осуществляют измерение температуры различных составных частей электромеханической трансмиссии, температуры охлаждающей жидкости, угловой скорости вращения роторов тяговых электродвигателей, токов в обмотках тягового генератора и тяговых электродвигателей, напряжения на силовых шинах 16 и т.д.
Далее контроллер 9 определяет наиболее критичный параметр или наиболее чувствительный к перегреву компонент трансмиссии в текущем режиме работы самоходной машины и формирует сигнал управления циркуляционным насосом из условия увеличения скорости или потока охлаждающей жидкости при увеличении по меньшей мере одного из указанных измеряемых параметров, обеспечивая исключение перегрева этого компонента.
При этом снижение отбора мощности на циркуляционный насос приводит к улучшению тягово-скоростных характеристик самоходной машины.
В шестом варианте реализации электромеханической трансмиссии обмотки статоров тяговых электродвигателей выполнены с коэффициентом заполнения пазов медью более 0,5 (более 50%), в частности, за счет выполнения зубцовых катушек из прямоугольного провода и выбора соответствующей конфигурации зубцов 19 и пазов магнитопровода статора 20. Это позволяет максимально увеличить радиус ротора и сократить длину пути магнитного потока в магнитопроводе статора, что приводит к улучшению тягово-скоростных характеристик трансмиссии на всех скоростях движения самоходной машины.
Из приведенного описания отдельных вариантов реализации электромеханической трансмиссии, характеризующихся различными альтернативными признаками формулы изобретения, следует, что реализация какого-либо одного варианта улучшения тягово-скоростных характеристик трансмиссии не исключает возможности реализации в этой трансмиссии какого-либо другого варианта. Иными словами, в предложенной электромеханической трансмиссии возможна одновременная реализация нескольких технических решений, характеризующихся различными альтернативными признаками, в их любом сочетании.
Для специалистов в данной области техники также понятно, что кроме описанных вариантов электромеханической трансмиссия самоходной машины возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
Изобретение относится к сельскохозяйственным тракторам. Электромеханическая трансмиссия самоходной машины содержит тяговый генератор, двигатель внутреннего сгорания, тяговый электродвигатель, бортовые редукторы, а также систему управления. Тяговый электродвигатель имеет числа зубцов статора и ротора исходя из изменяемого контроллером количества фаз. Тяговый генератор или электродвигатель выполнен с комбинированным независимым электромагнитным и магнитоэлектрическим возбуждением. Тяговый электродвигатель имеет количество фаз больше трех. Контроллер меняет алгоритм коммутации катушек этих фаз в зависимости от скорости движения машины. Контроллер управляет тяговым генератором или силовым выпрямителем. Электромеханическая трансмиссия содержит систему жидкостного охлаждения тягового генератора или тягового электродвигателя, или силового выпрямителя, или контроллера. Обмотки статора тягового электродвигателя выполнены с коэффициентом заполнения пазов медью более 0,5. Расширяется диапазон бесступенчатого регулирования скорости движения. 10 з.п. ф-лы, 2 ил.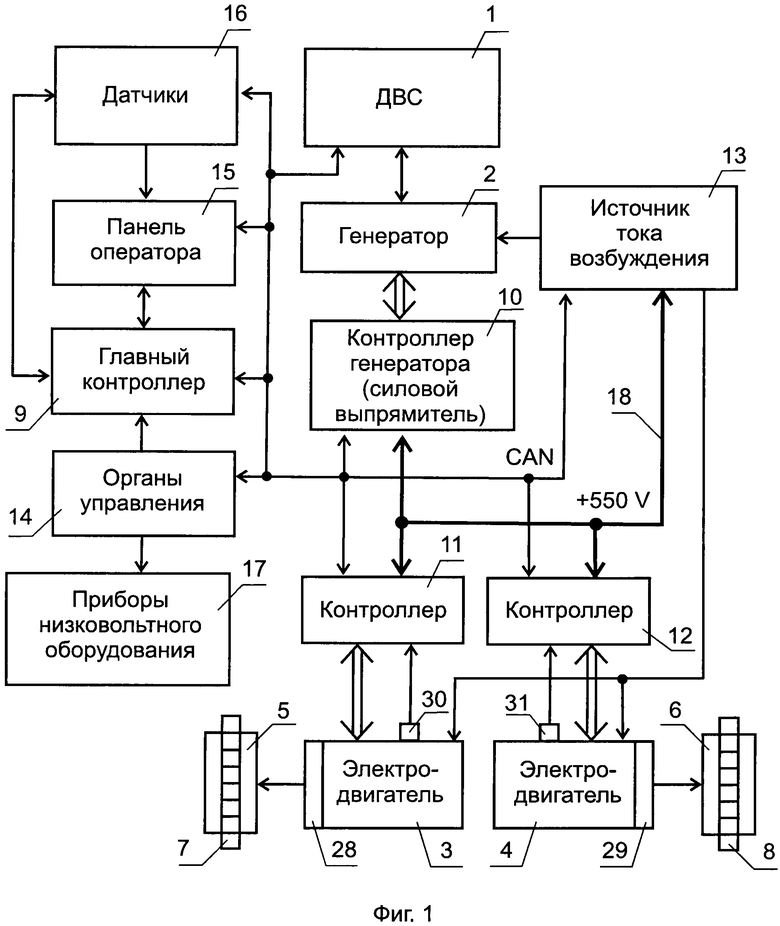
1. Электромеханическая трансмиссия самоходной машины, содержащая по меньшей мере один тяговый генератор, который непосредственно или через согласующее устройство соединен с двигателем внутреннего сгорания (ДВС) и приспособлен для преобразования по меньшей мере части механической энергии ДВС в электрическую энергию, передаваемую на силовые шины от тягового генератора непосредственно или через силовой выпрямитель, по меньшей мере один тяговый электродвигатель, бортовые редукторы, приспособленные для привода ведущих колес или гусениц самоходной машины и связанные по меньшей мере с одним тяговым электродвигателем непосредственно или по меньшей мере через одно передаточное устройство, а также систему управления, в состав которой входит по меньшей мере один орган управления и по меньшей мере один контроллер, соединенный с силовыми шинами и выполненный с возможностью управления тяговым генератором и/или по меньшей мере одним тяговым электродвигателем, причем по меньшей мере один тяговый генератор и/или тяговый электродвигатель выполнен с безобмоточным ротором и зубчатым статором, на каждом зубце статора размещена зубцовая катушка, а каждую фазу составляет четное число зубцовых катушек, соединенных между собой последовательно и/или параллельно, отличающаяся тем, что в ней дополнительно реализовано по меньшей мере одно из следующих технических решений:
а) по меньшей мере один тяговый электродвигатель имеет числа зубцов статора и ротора, выбранные из условия реализации тягового электродвигателя с различным количеством фаз, а контроллер выполнен с возможностью изменения количества фаз в процессе работы самоходной машины за счет изменения алгоритма подключения к силовым шинам зубцовых катушек, соединенных между собой последовательно и/или параллельно, таким образом, что при снижении скорости движения самоходной машины или скорости вращения ротора тягового электродвигателя осуществляется увеличение количества его фаз;
б) по меньшей мере один тяговый генератор и/или тяговый электродвигатель выполнен с комбинированным независимым электромагнитным и магнитоэлектрическим возбуждением, при этом его статор оснащен постоянными магнитами и обмотками возбуждения, соединенными между собой последовательно и/или параллельно и подключенными к источнику тока возбуждения, причем этот источник выполнен в виде составной части контроллера или отдельного устройства системы управления, соединенного с контроллером по цепям питания и/или управления;
в) по меньшей мере один тяговый электродвигатель реализован с количеством фаз больше трех, а контроллер выполнен с возможностью изменения алгоритма коммутации катушек этих фаз в зависимости от скорости движения самоходной машины или скорости вращения ротора таким образом, что при уменьшении указанной скорости осуществляется увеличение количества фаз, катушки которых в каждый момент времени подключены к силовым шинам, причем это подключение синхронизировано с углом поворота ротора и реализовано, в случае необходимости, с ограничением тока каждой фазы в режиме импульсной модуляции;
г) контроллер приспособлен для управления тяговым генератором и/или силовым выпрямителем из условия увеличения напряжения на силовых шинах при увеличении скорости движения самоходной машины и/или скорости вращения ротора по меньшей мере одного тягового электродвигателя;
д) электромеханическая трансмиссия содержит систему жидкостного охлаждения тягового генератора, и/или по меньшей мере одного тягового электродвигателя, и/или силового выпрямителя, и/или по меньшей мере одного контроллера, причем эта система содержит регулируемый циркуляционный насос, а контроллер выполнен с возможностью прямого или косвенного измерения или вычисления мощности потерь в тяговом генераторе и/или по меньшей мере в одном тяговом электродвигателе, и/или выходной мощности тягового генератора, и/или выходного крутящего момента или выходной мощности по меньшей мере одного тягового электродвигателя, и/или температуры по меньшей мере одной составной части электромеханической трансмиссии, и/или температуры охлаждающей жидкости, а также с возможностью управления циркуляционным насосом из условия увеличения скорости или потока охлаждающей жидкости при увеличении по меньшей мере одного из указанных измеряемых или вычисляемых параметров;
е) обмотки статора по меньшей мере одного тягового электродвигателя выполнены с коэффициентом заполнения пазов медью более 0,5.
2. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что по меньшей мере один тяговый электродвигатель выполнен с 12 зубцами статора и с 10-ю зубцами ротора, а контроллер приспособлен для изменения алгоритма управления зубцовыми катушками с 3-фазной на 6-фазную конфигурацию тягового электродвигателя в случае получения контроллером команды на изменение количества фаз тягового электродвигателя или в случае выявления контроллером снижения скорости вращения ротора тягового электродвигателя или скорости движения самоходной машины ниже предварительно установленной величины, записанной в памяти контроллера.
3. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что контроллер приспособлен для управления источником тока возбуждения и выполнен с возможностью формирования постоянного, или переменного, или импульсного тока возбуждения по меньшей мере одного тягового генератора и/или тягового электродвигателя в зависимости от положения и/или скорости вращения его ротора, и/или скорости движения самоходной машины, и/или выходного напряжения тягового генератора, и/или напряжения на силовых шинах, и/или нагрузки тягового электродвигателя.
4. Электромеханическая трансмиссия по п. 3, отличающаяся тем, что контроллер приспособлен для управления источником тока возбуждения из условия формирования тяговой характеристики самоходной машины гиперболического вида с обеспечением минимально возможного изменения тяговой мощности при изменении скорости движения самоходной машины или скорости вращения ротора по меньшей мере одного тягового электродвигателя.
5. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что контроллер приспособлен для управления тяговым генератором и/или силовым выпрямителем из условия увеличения напряжения на силовых шинах при увеличении скорости движения самоходной машины и/или скорости вращения ротора по меньшей мере одного тягового электродвигателя, если текущее значение этой скорости меньше величины, заданной оператором самоходной машины с помощью органа управления, соединенного с контроллером.
6. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что согласующее устройство, приспособленное для соединения тягового генератора с ДВС, выполнено в виде упругой муфты и/или мультипликатора.
7. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что тяговый генератор содержит встроенный контроллер или силовой выпрямитель.
8. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что передаточное устройство, связывающее тяговый электродвигатель с бортовыми редукторами, содержит главную передачу, выходы которой соединены с бортовыми редукторами с использованием бортовых фрикционов.
9. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что она содержит тяговые электродвигатели, количество которых равно количеству гусениц или ведущих колес самоходной машины, причем тяговые электродвигатели приспособлены для независимого привода каждой гусеницы или каждого ведущего колеса.
10. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что по меньшей мере один контроллер содержит силовой преобразователь, реализованный на основе транзисторов IGBT, и устройство управления этими транзисторами, в состав которого входят гальванически развязанные драйверы этих транзисторов, микроконтроллер или цифровой сигнальный процессор и интерфейсные устройства, приспособленные для обмена информацией с этим контроллером по сети CAN (Controller Area Network - сеть контроллеров) и/или LIN (Local Interconnect Network - локальная сеть).
11. Электромеханическая трансмиссия по п. 1, отличающаяся тем, что по меньшей мере один тяговый электродвигатель содержит встроенный контроллер.
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ | 2007 |
|
RU2376158C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2001 |
|
RU2179119C1 |
| US 2005072608 A1, 07.04.2005 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2412831C1 |
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА ДЛЯ РАБОЧЕЙ МАШИНЫ | 2006 |
|
RU2394701C2 |

