Изобретение относится к измерительной технике и может быть использовано для измерения сдвиговой вязкости жидкостей в широком диапазоне изменения измеряемого параметра.
Известен ротационный вискозиметр для измерения вязкости жидкости, который заключается в том, что исследуемое вещество (ИВ, как правило, это жидкость) помещается в малый зазор между двумя телами, необходимый для сдвига исследуемого вещества. Одно из тел на протяжении всего измерения остается неподвижным, другое, называемое ротором или рабочим органом ротационного вискозиметра, совершает вращение с постоянной скоростью. Предполагается, что при вращении ротора/рабочего органа скорость прилегающего к нему слоя жидкости равна скорости самого ротора, а скорость слоя ИВ вблизи поверхности неподвижного тела равна нулю. Таким образом, момент вращения ротора ротационного вискозиметра является мерой вязкости ИВ.
К недостатку известного изобретения относится невозможность осуществлять измерение вязкости ИВ непосредственно в ходе технологического процесса с его участием из-за конструктивных недостатков, не позволяющих его использование для определения вязкости вещества, например газа или жидкости, транспортируемых по трубам [1].
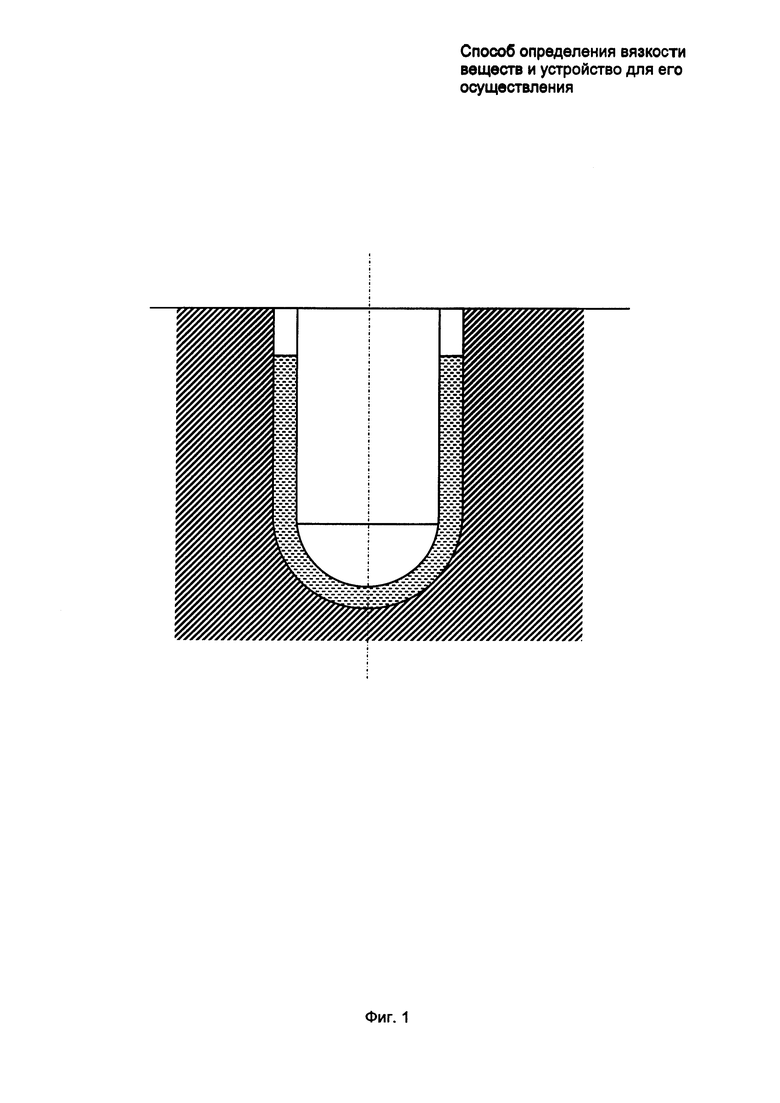
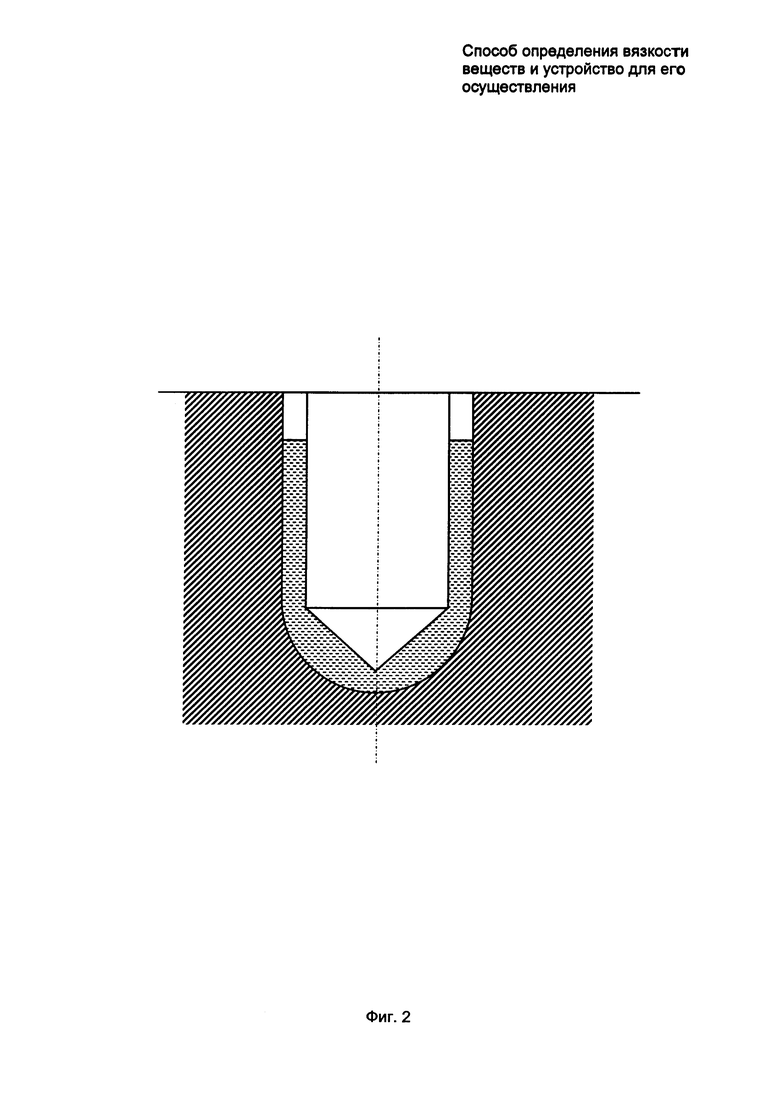
На Фиг. 1 и Фиг. 2 показаны принципиальные схемы ротационного вискозиметра, рабочие органы которого имеют геометрическую форму в виде коаксиальных цилиндров.
При этом рабочий орган устройства комбинирован: цилиндр-полусфера (Фиг. 1) или цилиндр-конус-диск (Фиг. 2).
ИВ находится между рабочими поверхностями; сила сопротивления сдвигу, возникающая при вращении рабочего органа/ротора, измеряется, причем, по ее значению судят о величине сдвиговой вязкости.
Известен способ определения вязкости жидкости, включающий погружение в исследуемую жидкость лопатки вискозиметра, возбуждение ее колебаний на резонансной частоте подвесной системы, измерение амплитуды колебаний и расчет вязкости жидкости, предварительное определение постоянной вискозиметра, измерение амплитуды колебаний лопатки при низких частотах возбуждения и на ее основании расчет степени успокоения, по которой судят о вязкости. Устройство содержит катушку возбуждения, подключенную к выходу генератора переменного напряжения и к персональному компьютеру. По программе лопатка погружается в исследуемую жидкость, осуществляется последовательное возбуждение подвеса вискозиметра генератором, измерение выходных сигналов, по которым, зная константу прибора, определяют вязкость жидкости [2].
Недостатками известного способа и реализующего его устройства является его низкая производительность, сравнительно невысокая точность, связанная со сложностью конструкции устройства, и трудности с автоматизацией процесса измерения при перекачке жидкости, например, по трубам.
Во многом это связано с необходимостью отбора пробы ИВ для проведения испытаний. Таким образом, время, необходимое для подготовки процесса измерения, окружающая температура, освещенность, влажность могут существенно изменить физические свойства ИВ, в том числе его вязкость, по сравнению с теми значениями, которые характерны для ИВ, находящегося в технологическом процессе.
Например, в процессе полимеризации ИВ, например эпоксидной смолы, который происходит при довольно высокой температуре, зачастую необходим непрерывный мониторинг ее вязкости. Если изъять ИВ из процесса, то за время подготовки измерения и самого измерения неизбежно изменится температура ИВ, а значит ее вязкость и условия полимеризации.
Если ИВ токсично, агрессивно или взрывоопасно, то безопасный отбор пробы для осуществления измерения вязкости представляет собой серьезную техническую проблему.
Известен способ для измерения вязкости жидкости, принятый за прототип, и вискозиметр, содержащий первую камеру и вторую камеру, отделенную от первой камеры, микроканал, соединяющий первую камеру со второй камерой, первый тонкопленочный слой, расположенный поверх первой камеры, и второй слой тонкой пленки, расположенный над второй камерой, первый пьезоэлектрический слой пленки расположен поверх первой тонкой пленки и второй пьезоэлектрической пленки, расположенной над второй тонкой пленкой. По крайней мере, одна из первого и второго слоя пьезоэлектрических пленок имеет шестиугольную форму, если наибольшее расстояние между центром и краем пьезоэлектрической пленки больше порогового диапазона, и круглую форму, если расстояние меньше порогового диапазона, в котором пороговый диапазон 55 мкм - 60 мкм. [3]. Недостатком известного устройства являются трудности с автоматизацией процесса измерения при перекачке жидкости, например, по трубам.
Для измерения может понадобиться довольно большой объем ИВ, что может представлять собой серьезную проблему с точки зрения самых различных аспектов.
В качестве примера можно привести ситуацию, когда в качестве ИВ выступают биологические жидкости, такие как кровь, плазма и т.д., которые к моменту отбора их достаточного количества могут существенно изменить свои физические свойства, в том числе вязкость.
Предлагаемые технические решения позволяют существенным образом устранить указанные недостатки.
Целью настоящего изобретения является создание способа и реализующего способ устройства, которые позволили бы упростить и автоматизировать процесс измерения вязкости, осуществлять мониторинг вязкости непосредственно в процессе переработки, хранения или транспортировки ИВ, сделать измерение более быстрым и оперативным, использовать существенно меньшие количества ИВ.
Указанная цель достигается тем, что в известном способе определения вязкости веществ, предполагающем организацию «скользящего»/сдвигового перемещения рабочего органа измерительного устройства относительно контактирующего с ним исследуемого вещества (ИВ), «скользящее» (сдвиговое) перемещение рабочего органа измерительного устройства, а точнее перемещение его рабочей поверхности относительно контактирующего с ней ИВ, осуществляют с помощью индуктора с током и источника магнитного поля, располагаемых вблизи рабочего органа или внутри рабочего органа и обеспечивающих прямое электромагнитно-акустическое преобразование энергии, причем регистрацию упругих колебаний рабочего органа после его взаимодействия с ИВ осуществляют путем использования обратного электромагнитно-акустического эффекта, причем вязкость ИВ определяют по изменению значения одного или нескольких параметров колебаний рабочего органа, как механической колебательной системы, относительно соответствующих величин, определенных при калибровке измерительной системы.
Указанная цель достигается также тем, что упругие колебания в рабочем органе возбуждают и принимают на одной или нескольких модах его собственного механического резонанса, а вязкость ИВ определяют по изменению параметров колебания рабочего органа, как механической резонансной колебательной системы, относительно значений, определенных при калибровке.
Достижению цели способствует также то, что устройство для определения вязкости веществ, содержащее рабочий орган, поверхность которого соприкасается с ИВ и осуществляет «скользящее» (сдвиговое) перемещение относительно ИВ, и блок измерения параметров, связанных с механическим сопротивлением этому «сдвиговому» перемещению, дополнительно содержит по крайней мере одну электрическую катушку/индуктор, а также соединенные с ней генератор тока и блок приема и обработки информативных электрических сигналов, а также источник постоянного, переменного, или импульсного магнитного поля, расположенный вблизи электрической катушки, причем в качестве рабочего органа используется механический резонатор/звукопровод (например, пластина), выполненный из одного материала или комбинации материалов, причем хотя бы один из материалов комбинации должен иметь либо достаточно высокую электропроводность, либо обладать магнитострикционными свойствами, причем по крайней мере один из геометрических параметров резонатора должен удовлетворять условию возникновения механического резонанса в направлении или в совокупности направлений, параллельных поверхности касания рабочего органа с ИВ.
Цель достигается также тем, что толщина Н пластины - рабочего органа выбивается из соотношения
где N - целые числа из ряда 1, 2, 3…n;
λ - длина поперечной упругой волны в материале пластины, определяемая по формуле,

где С - средняя скорость упругой волны в материале/материалах пластины;
f1 - частота первой моды упругих колебаний в пластине, возбуждаемых катушкой,
Достижению цели способствует и то, что катушка и/или источник магнитного пол, выполняются в виде независимого от рабочего органа блока, взаимодействующего с рабочим органом дистанционно путем возникновения между ними электромагнитно-механической связи.
Цель достигается и за счет того, что в качестве рабочего органа используется участок стенки сосуда, в который помещается ИВ, причем для оптимизации параметров колебательной системы на выбранной частоте, толщина стенки в месте измерения может быть либо уменьшена, например, путем механической обработки, либо увеличена, путем, например, приклейки вспомогательной пластины, причем для повышения эффективности устройства, вспомогательная пластина может иметь особые, отличные от материала стенки, физические свойства, например обладать высокой магнитострикцией и/или высокой электропроводностью, и/или остаточной намагниченностью.
Цель достигается также за счет того, что в качестве источника магнитного поля используется сам рабочий орган, который предварительно намагничивается до необходимых значений магнитной индукции.
Достижению цели способствует и то, что пластина/рабочий орган представляет собой композицию из двух слоев - основного, выполненного из материала с низким затуханием ультразвука, и/или магнитожесткого материала, обладающего высокой остаточной намагниченностью, и вспомогательного, материал которого обладает высоким коэффициентом магнитострикции и/или высокой электропроводностью, причем слои механически жестко связаны друг с другом, например, путем склейки.
Достигается указанная цель и тем, что на рабочем органе в месте измерения вязкости предварительно формируется слой из материала с высоким коэффициентом магнитострикции и/или обладающего высокой электропроводностью, например, путем наклеивания на стенку соответствующей пластинки или фольги.
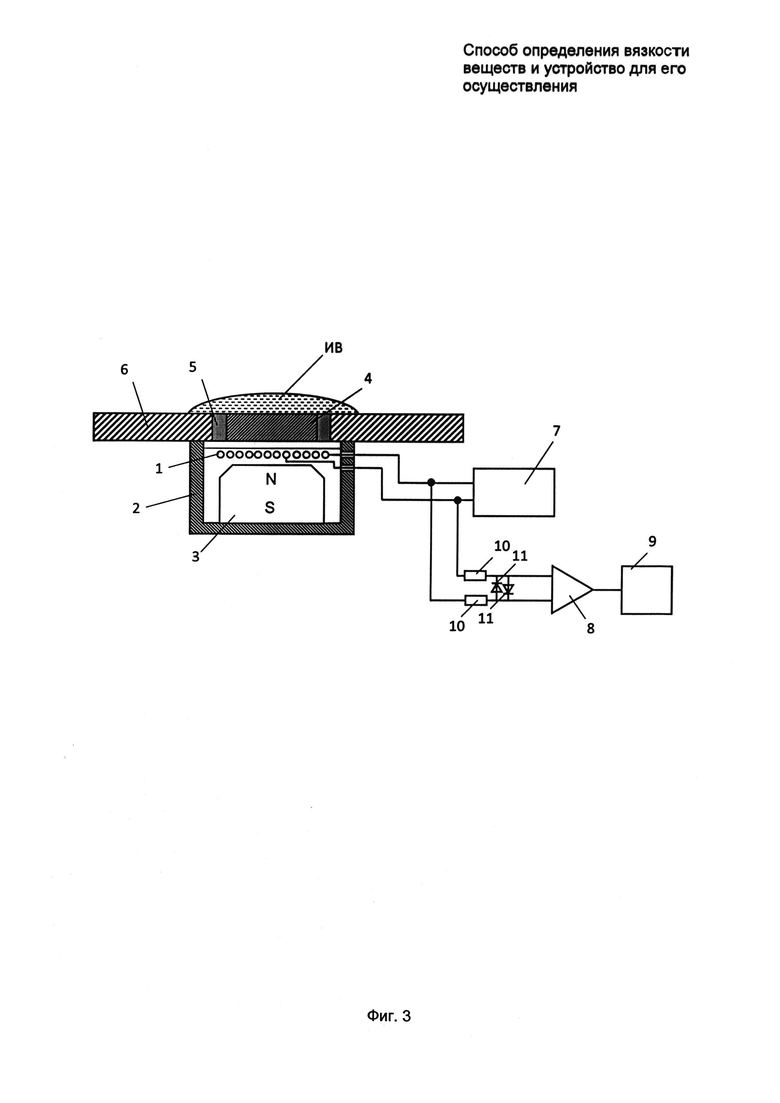
Вариант устройства приведен на Фиг. 3.
Устройство состоит из катушки 1, помещенной в корпус 2, содержащий постоянный магнит 3. В непосредственной близости от катушки 1 расположен рабочий орган/пластина 4, который через акустическую развязку 5 соединен с пластиной-столиком 6, на который помещается исследуемое вещество ИВ. Катушка 1 электрически соединена с генератором 7 и усилителем/приемным блоком 8, который, в свою очередь, соединен с вычислительным блоком 9. Защитная цепь из резисторов 10 и диодов 11, включенная между катушкой 1 и усилителем/приемным блоком 8, служит для защиты входных каскадов усилителя/приемного блока 8 от влияния генератора 7.
Устройство работает следующим образом.
Генератор 7 генерирует достаточно короткие, а потому достаточно широкополосные импульсы электрического тока, протекающего через катушку 1. Рабочий орган/пластина 4, находящийся одновременно в поле магнита 3 и электромагнитного поля, создаваемого катушкой 1, вследствие эффектов электромагнитно-акустической трансформации, начинает колебаться таким образом, что поверхность рабочего органа/пластины 4, непосредственно контактирующая с исследуемым веществом ИВ, совершает вынужденные, а затем, после прекращения импульсного тока через катушку 1, свободные колебания сдвига, направления которых параллельны поверхности соприкосновения ИВ и рабочего органа/пластины 4.
Эти свободные колебания сдвига осуществляются на одной или одновременно на нескольких модах собственных колебаний рабочего органа/пластины 4 и в отсутствие ИВ продолжаются достаточно долгое время, поскольку рабочий орган/пластина 4 является достаточно высокодобротной механической колебательной системой.
Толщина Н пластины - рабочего органа 4 определяет рабочую частоту устройства, которая рассчитывается из соотношения:
где N - целые числа из ряда 1, 2, 3…n;
λ - длина поперечной упругой волны в материале пластины,

С - средняя скорость упругой волны в материале/материалах пластины,
F - центральная частота упругих импульсов в пластине, возбуждаемых катушкой.
Таким образом, для сдвиговый толщинный резонанс ненагруженного рабочего органа/пластины 4 может происходить только на определенных частотах, значение которых вычисляется по формуле
Отсюда первая мода толщинных колебаний рабочего органа/пластины предполагает ее свободные колебания на частоте
Этому способствует, во-первых, правильный выбор материала рабочего органа/пластины 4, во вторых, наличие акустической развязки 5, которая в значительной степени блокирует утечку колебательной энергии из рабочего органа/пластины 4 в пластину/столик 6.
Катушка 2, вследствие проявления обратных эффектов электромагнитно-акустического преобразования, принимает электрические сигналы от свободно колеблющегося рабочего органа/пластины 4, которые поступают на приемное устройство 8, где усиливаются, при необходимости подвергаются фильтрации и детектированию и поступают на вход вычислительного устройства 9.
В этом устройстве происходит выделение информативных параметров принимаемых сигналов и сравнение их с калибровочными кривыми/функциями, после чего вычислительное устройство 9 вычисляет и отображает абсолютное или относительное значение сдвиговой вязкости ИВ.
Добротность и другие параметры колебательной системы - рабочего органа/пластины 4, существенно изменятся, если на пластину/столик поместить, например, каплю исследуемого вещества ИВ.
Гипотетическая жидкость, не обладающая сдвиговой вязкостью, не окажет никакого заметного влияния на параметры колебательной системы - рабочего органа/пластины 4.
Реальная же жидкость/исследуемое вещество, обладающая сдвиговой вязкостью, немедленно начнет отбор энергии от колебательной системы - рабочего органа/пластины 4.
Таким образом, добротность колебательной системы - рабочего органа/пластины 4 - и прямо или косвенно связанные с ней параметры: декремент затухания, значение(я) собственной/собственных (резонансных) частоты/частот, распределение энергии гармоник и т.д. начинают меняться под воздействием ИВ. Степень этого изменения характеризует сдвиговую вязкость ИВ.
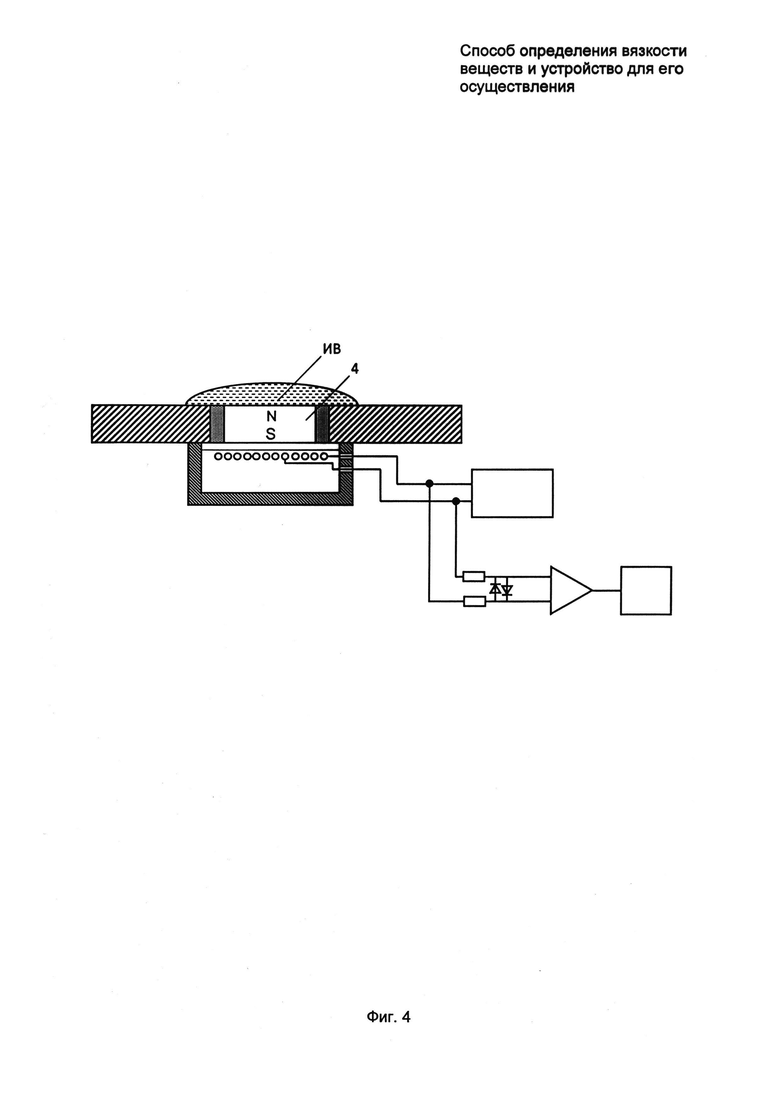
На Фиг. 4 изображен еще один, еще более компактный вариант устройства для измерения вязкости. От первого варианта он отличается только отсутствием магнита. В данном случае рабочий орган/пластина 4 выполнен из магнитожесткого материала, например стали, и предварительно намагничен. С точки зрения электромагнитно-акустического преобразования, этот вариант полностью аналогичен варианту, приведенному на Фиг. 3.
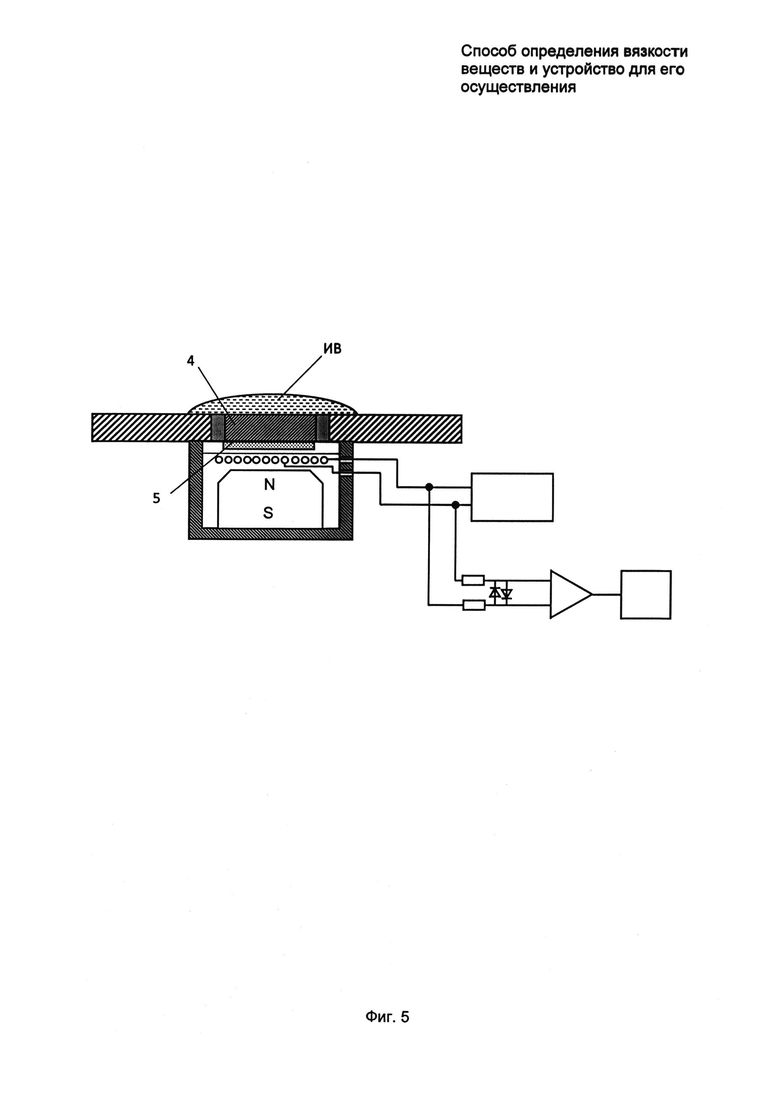
На Фиг 5. Приведен вариант, отличающийся тем, что на рабочем органе/пластине 4 сформирован активный с точки зрения электромагнитно-акустического преобразования слой, например, из никеля 5. В этом случае основной материал рабочего органа/пластины 4 может быть выполнен из диэлектрика, например кварца, или металла, обладающего специальными свойствами, например титана, известного своими высокими антикоррозионными свойствами.
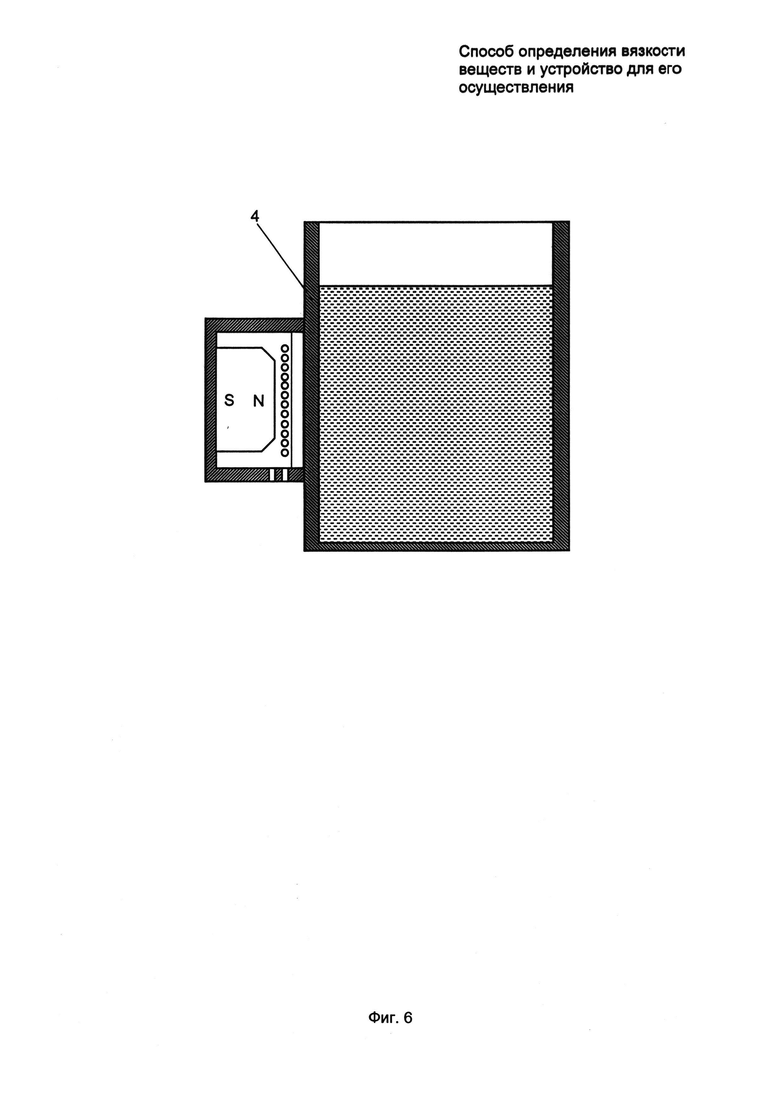
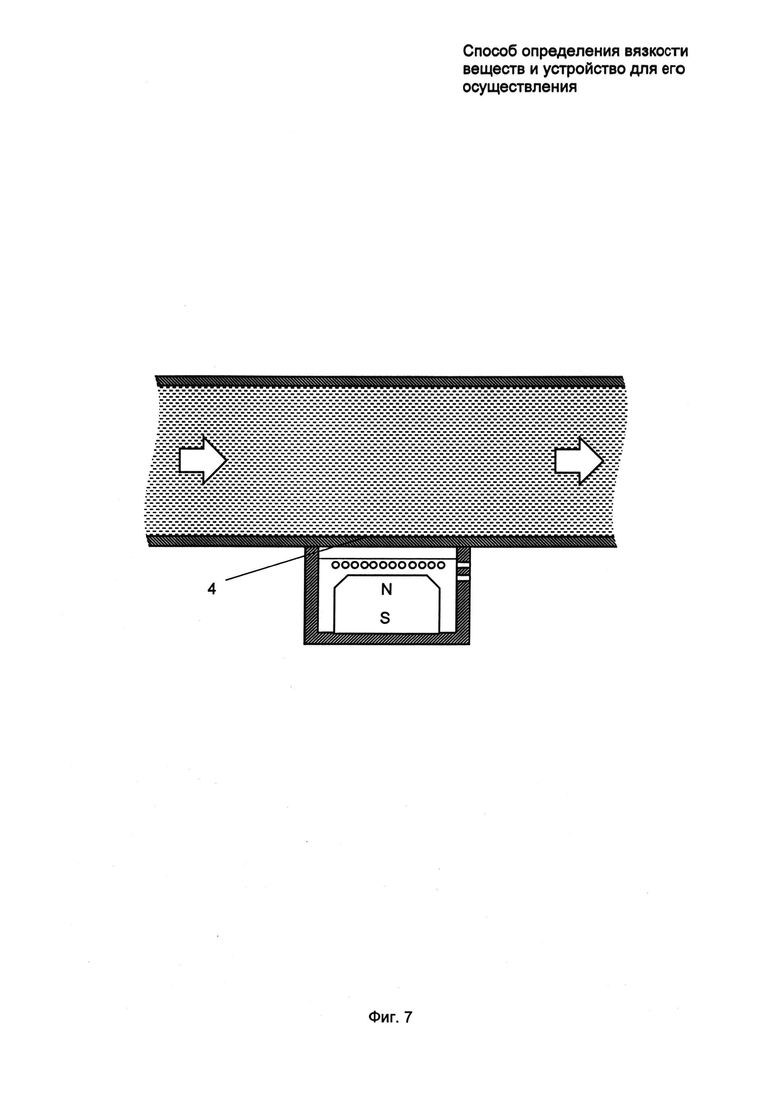
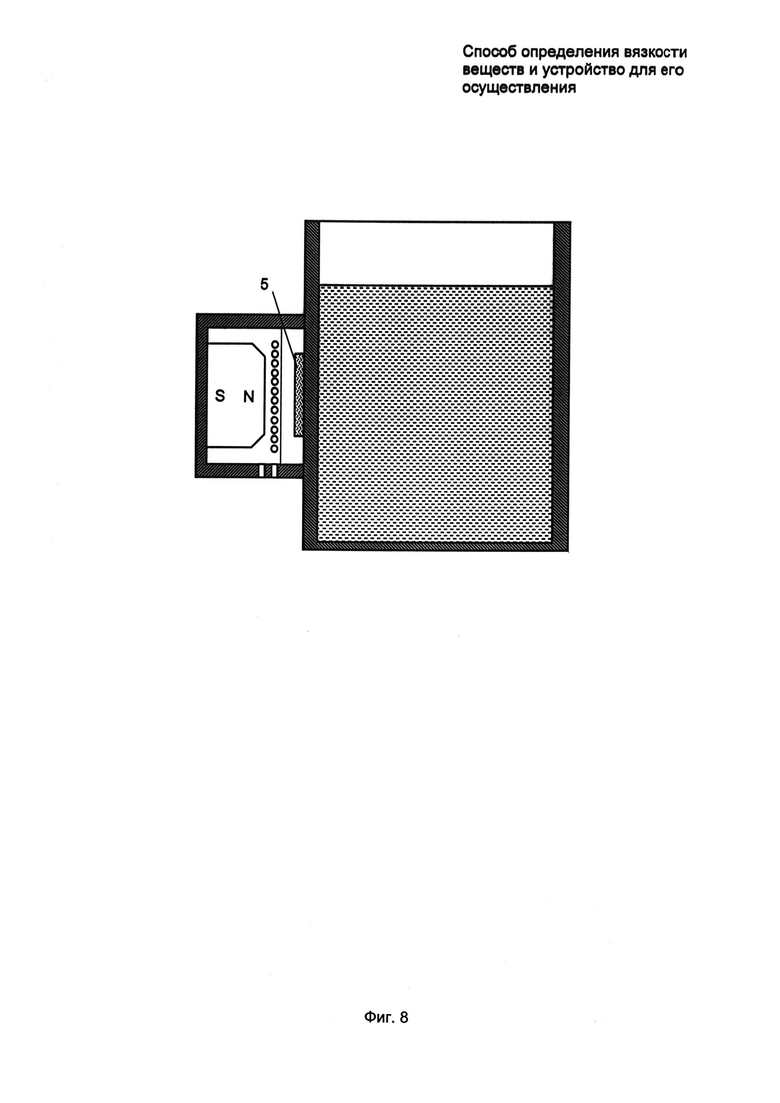
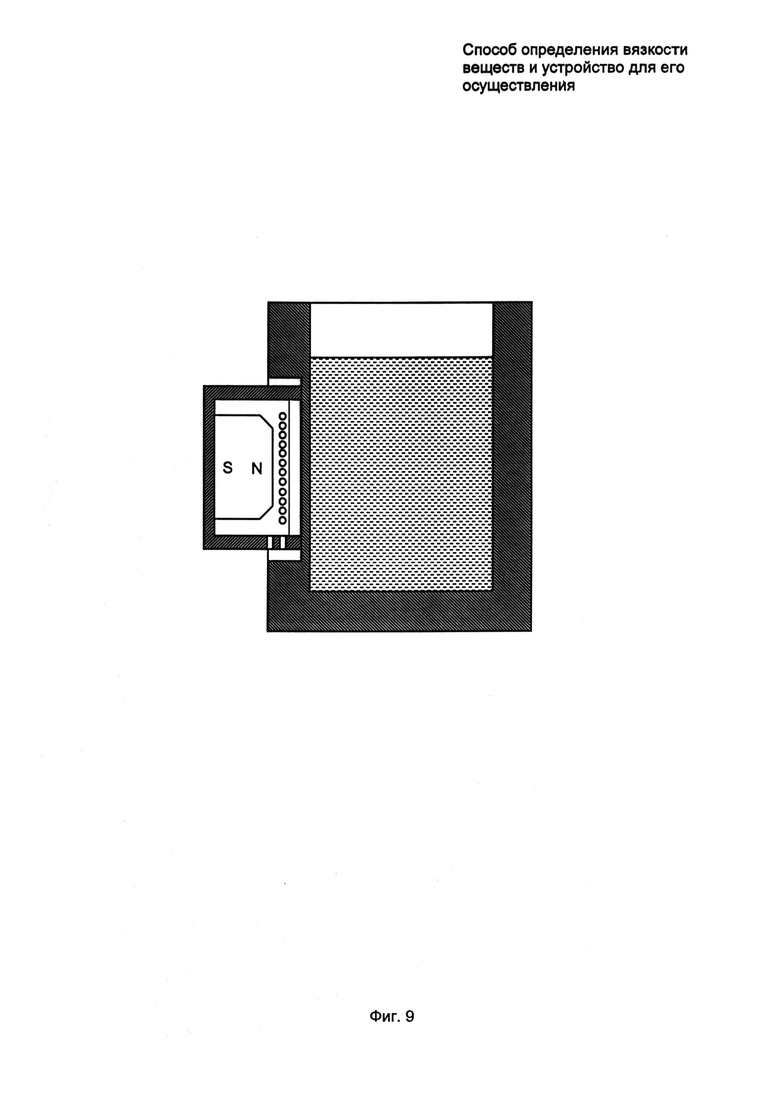
На Фиг. 6 и Фиг. 7 изображены варианты устройства, позволяющего измерять вязкость и/или осуществлять ее непрерывный мониторинг непосредственно в ходе технологических/производственных процессов, а также при хранении и транспортировке ИВ. Измерения производятся прямо через стенку сосуда/трубы. Причем роль рабочего органа/пластины 4 выполняет соответствующий участок стенки сосуда/трубы.
Фиг. 8 показывает возможную реализацию устройства для случаев, когда материал стенки сосуда/трубы является недостаточно активным с точки зрения электромагнитно-акустического преобразования. В этих случаях можно применить прием, идея которого показана на Фиг. 5, а именно сформировать на наружной поверхности трубы слой активного с точки зрения электромагнитно-акустического преобразования вещества 5.
На Фиг. 9 показан вариант устройства для измерения вязкости для случаев, если толщина стенки слишком большая/маленькая для проведения измерений на выбранных частотах. В этих случаях стенку сосуда/трубы в месте измерения можно уменьшить/увеличить.
Следует отметить, что вместо пластины в качестве рабочего органа можно использовать цилиндр, кольцо, шар, их фрагменты и прочие формы резонаторов.
Разумеется, кроме толщинного резонанса рабочего органа можно использовать крутильный, контурный, продольный и прочие виды резонансов. Критерием выбора должно быть использование таких резонансов, которые обеспечивают скользящие по отношению к ИВ перемещения.
Вместо резонансных колебаний можно использовать обычную сдвиговую волну, распространяющуюся по нормали к поверхности рабочего органа/пластины и испытывающую многократные отражения от границ. Однако по чувствительности такая измерительная система будет существенно уступать системе резонансной.
Использование импульсного или переменного источника магнитного поля может быть в ряде случаев оправдано с точки зрения оптимизации магнитострикционного или силового взаимодействия между датчиком и рабочим органом. Например, импульсный источник магнитного поля позволит избежать слишком сильного «прилипания» постоянного магнита к рабочему органу.
Источники информации
1. Патент РФ 2424599.
2. А.С. СССР 1800315.
3. патент США 9,128,022.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения физических свойств веществ | 1981 |
|
SU949419A1 |
| Вибрационное устройство для определения физических свойств веществ | 1976 |
|
SU609078A1 |
| Устройство для измерения сдвиговой вязкости и упругости сред | 1976 |
|
SU682796A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ПРОЧНОСТНЫХ ХАРАКТЕРИСТИК МАТЕРИАЛА ДВИЖУЩЕГОСЯ ЛИСТОВОГО ПРОКАТА | 2003 |
|
RU2231055C1 |
| Устройство для обнаружения зон с неоднородными физическими свойствами в изделиях из металлопроката | 2021 |
|
RU2767939C1 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ ВЯЗКОСТИ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2417364C1 |
| СЕНСОР, СИСТЕМА И МЕТОД ДЛЯ ИЗМЕРЕНИЯ СВОЙСТВ ТЕКУЧЕЙ СРЕДЫ С ИСПОЛЬЗОВАНИЕМ МНОГОМОДОВОГО КВАЗИ - СДВИГОВОГО - ГОРИЗОНТАЛЬНОГО РЕЗОНАТОРА | 2009 |
|
RU2451287C2 |
| ВИБРОВИСКОЗИМЕТРИЧЕСКИЙ ДАТЧИК | 2008 |
|
RU2419781C2 |
| Вибрационный вискозиметр и способ его регулировки | 1989 |
|
SU1742676A1 |
| Вибрационный вискозиметр | 1990 |
|
SU1744593A1 |
Изобретение относится к метрологии. Способ определения вязкости веществ предполагает организацию «скользящего»/сдвигового перемещения рабочего органа измерительного устройства относительно контактирующего с ним исследуемого вещества (ИВ) и измерение параметров, связанных с сопротивлением этому «скользящему» перемещению, обусловленным вязкостью ИВ. «Скользящее» (сдвиговое) перемещение рабочего органа измерительного устройства, а точнее перемещение его рабочей поверхности относительно контактирующего с ней ИВ, осуществляют с помощью индуктора с током и источника магнитного поля, располагаемых вблизи рабочего органа или внутри рабочего органа. Затем обеспечивают прямое электромагнитно-акустическое преобразование энергии, причем регистрацию упругих колебаний рабочего органа после его взаимодействия с ИВ осуществляют путем использования обратного электромагнитно-акустического эффекта. Вязкость ИВ определяют по изменению значения одного или нескольких параметров колебаний рабочего органа, как механической колебательной системы, относительно соответствующих величин, определенных при калибровке измерительной системы. Технический результат – упрощение процесса измерения, повышение быстродействия. 2 н. и 7 з.п. ф-лы, 9 ил.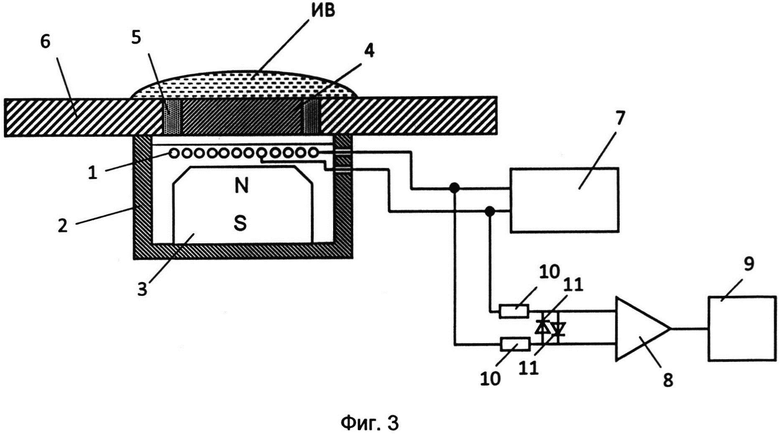
1. Способ определения вязкости веществ, предполагающий организацию «скользящего»/сдвигового перемещения рабочего органа измерительного устройства относительно контактирующего с ним исследуемого вещества (ИВ) и измерение параметров, связанных с сопротивлением этому «скользящему» перемещению, обусловленным вязкостью ИВ, причем значение вязкости определяют либо путем сопоставления результатов этих измерений с известными калибровочными кривыми, либо по известным формулам, отличающийся тем, что «скользящее» (сдвиговое) перемещение рабочего органа измерительного устройства, а точнее перемещение его рабочей поверхности относительно контактирующего с ней ИВ, осуществляют с помощью индуктора с током и источника магнитного поля, располагаемых вблизи рабочего органа или внутри рабочего органа и обеспечивающих прямое электромагнитно-акустическое преобразование энергии, причем регистрацию упругих колебаний рабочего органа после его взаимодействия с ИВ осуществляют путем использования обратного электромагнитно-акустического эффекта, причем вязкость ИВ определяют по изменению значения одного или нескольких параметров колебаний рабочего органа, как механической колебательной системы, относительно соответствующих величин, определенных при калибровке измерительной системы.
2. Способ по п. 1, отличающийся тем, что упругие колебания в рабочем органе возбуждают и принимают на одной или нескольких модах его собственного механического резонанса, а вязкость ИВ определяют по изменению параметров колебания рабочего органа, как механической резонансной колебательной системы, относительно значений, определенных при калибровке.
3. Устройство для определения вязкости веществ, содержащее рабочий орган, поверхность которого соприкасается с ИВ и осуществляет «скользящее» (сдвиговое) перемещение относительно ИВ, и блок измерения параметров, связанных с механическим сопротивлением этому «сдвиговому» перемещению, отличающееся тем, что оно дополнительно содержит по крайней мере одну электрическую катушку/индуктор, а также соединенные с ней генератор тока и блок приема и обработки информативных электрических сигналов, а также источник постоянного, переменного или импульсного магнитного поля, расположенный вблизи электрической катушки, причем в качестве рабочего органа используется механический резонатор/звукопровод (например, пластина), выполненный из одного материала или комбинации материалов, причем хотя бы один из материалов комбинации должен иметь либо достаточно высокую электропроводность, либо обладать магнитострикционными свойствами, причем по крайней мере один из геометрических параметров пластины должен удовлетворять условию возникновения механического резонанса в направлении или в совокупности направлений, параллельных поверхности касания рабочего органа с ИВ.
4. Устройство по п. 3, отличающееся тем, что толщина Н пластины - рабочего органа - выбирается из соотношения
 ,
,
где N - целые числа из ряда 1, 2, 3…n;
λ - длина поперечной упругой волны в материале пластины, определяемая по формуле,
 ,
,
где с - средняя скорость упругой волны в материале/материалах пластины;
f1 - частота первой моды упругих колебаний в пластине, возбуждаемых катушкой,
 .
.
5. Устройство по п. 3, отличающееся тем, что катушка и/или источник магнитного поля выполняются в виде независимого от рабочего органа блока, взаимодействующего с рабочим органом дистанционно путем возникновения между ними электромагнитно-механической связи.
6. Устройство по п. 3, отличающееся тем, что в качестве рабочего органа используется участок стенки сосуда, в который помещается ИВ, причем для оптимизации параметров колебательной системы на выбранной частоте толщина стенки в месте измерения может быть либо уменьшена, например, путем механической обработки, либо увеличена, путем, например, приклейки вспомогательной пластины, причем для повышения эффективности устройства вспомогательная пластина может иметь особые, отличные от материала стенки, физические свойства, например обладать высокой магнитострикцией, и/или высокой электропроводностью, и/или остаточной намагниченностью.
7. Устройство по п. 3, отличающееся тем, что в качестве источника магнитного поля используется сам рабочий орган, который предварительно намагничивается до необходимых значений магнитной индукции.
8. Устройство по п. 3, отличающееся тем, что пластина/рабочий орган представляет собой композицию из двух слоев - основного, выполненного из материала с низким затуханием ультразвука и/или магнитожесткого материала, обладающего высокой остаточной намагниченностью, и вспомогательного, материал которого обладает высоким коэффициентом магнитострикции и/или высокой электропроводностью, причем слои механически жестко связаны друг с другом, например, путем склейки.
9. Устройство по п. 3 или 6, отличающееся тем, что на рабочем органе в месте измерения вязкости предварительно формируется слой из материала с высоким коэффициентом магнитострикции и/или обладающего высокой электропроводностью, например, путем наклеивания на стенку соответствующей пластинки или фольги.
| US 7520162 B2, 21.04.2009 | |||
| US 20030233868 A1, 25.12.2003 | |||
| US 5533381 A1, 09.07.1996 | |||
| Вибрационный вискозиметр и способ его регулировки | 1989 |
|
SU1742676A1 |
| US 5837885 A1, 17.11.1998 | |||
| US 6334356 B1, 01.01.2002 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЯЗКОСТИ КРОВИ | 1997 |
|
RU2125265C1 |

