[0001] Настоящая заявка относится к области терапии, в частности, связанной с брахитерапией с высокой мощностью дозы (HDR), и изложена с конкретными ссылками на нее. Однако следует принимать во внимание, что настоящее изобретение также найдет применение в сочетании с другими терапевтическими способами лечения, такими как брахитерапия с низкой мощностью дозы, брахитерапия в режиме импульсной мощности дозы, радиочастотная абляция, низкотемпературная абляция, микроволновая абляция, лазерная абляция, установка других лечебных источников и т.п.
[0002] Часто злокачественные опухоли лечат, используя комбинацию таких способов лечения, как хирургическая операция, химиотерапия, лучевая терапия и т.п. Например, часто опухоль удаляют путем хирургического вмешательства, после чего пациент проходит химиотерапию или лучевую терапию, чтобы уничтожить все те злокачественные клетки, которые не были удалены. В одном способе лучевой терапии пучок рентгеновского излучения от линейного ускорителя направляют через целевую область(и). В отличие от этого, при брахитерапии радиоактивный источник или зерно(а) помещают в целевую область для облучения целевой области изнутри.
[0003] При брахитерапии с высокой мощностью дозы пациенту вводят аппликатор, проходящий через целевую зону, которая подлежит облучению. Аппликатор может представлять собой один зонд, несколько отдельных каналов, устройство, содержащее несколько каналов, одну или несколько игл или органоспецифическую конструкцию. Источник с высокой мощностью дозы, например гранулу или зерно иридия-192, перемещают по аппликатору на конце проволоки и задерживают в одном или нескольких положениях в течение запланированного периода времени. Такое лечение повторяют, как правило, один или два раза в сутки в течение периода в несколько суток.
[0004] В примере, в котором лечили рак молочной железы, после удаления опухоли молочной железы хирургически имплантировали аппликатор в целевую область, подлежащую облучению. Проводили КТ-сканирование, чтобы получить высокоразрешающее изображение аппликатора и ткани в целевой области. Это изображение использовали для планирования сеансов брахитерапии, чтобы запланировать положение вдоль аппликатора и длительность размещения источника.
[0005] Затем запланированный сеанс брахитерапии проводили один или два раза в сутки в течение нескольких суток. В частности, существует возможность того, что в мягких тканях, таких как молочная железа, аппликатор может смещаться относительно ткани, подлежащей лечению. Перед каждым сеансом брахитерапии проводили КТ-сканирование и сопутствующую сегментацию аппликатора на изображениях, чтобы гарантировать, что аппликатор находится в правильном положении и что запланированное лечение будет доставлено. Этот процесс может требовать много времени и трудозатрат.
[0006] Предоставлена сущность изобретения для соблюдения 37 C.F.R. § 1.73, который требует в кратком изложении сущности изобретения отобразить природу и сущность изобретения. Она представлена в рамках договоренности о том, что ее не следует использовать для интерпретации или ограничения объема или значения формулы изобретения.
[0007] По одному аспекту иллюстративных вариантов осуществления, способ брахитерапии может включать размещение аппликатора в целевой области, где аппликатор содержит множество полых каналов, перемещение устройства слежения по меньшей мере через часть из множества каналов, определение положения одного или нескольких из множества каналов, основываясь на перемещении устройства слежения, и создание плана брахитерапии для введения дозы облучения, основываясь на положении одного или нескольких из множества каналов.
[0008] По другому аспекту иллюстративных вариантов осуществления, машиночитаемый носитель информации может содержать исполняемый компьютером код, хранящийся на этом носителе, где исполняемый компьютером код сконфигурирован так, чтобы вычислительное устройство, в которое загружен машиночитаемый носитель информации, выполняло стадии определения положения одного или нескольких из множества каналов аппликатора относительно целевой области, основываясь на устройстве слежения, где аппликатор расположен в целевой области, где устройство слежения перемещают через один или несколько из множества каналов, и создания по меньшей мере части плана брахитерапии для введения дозы облучения, основываясь на положении одного или нескольких из множества зондов.
[0009] По другому аспекту иллюстративных вариантов осуществления, брахитерапевтическая система для целевой области может содержать аппликатор, содержащий множество полых каналов, устройство слежения, генератор сигналов слежения для генерации сигнала, принимаемого устройством слежения, и процессор. Устройство слежения может обладать определенными размерами и формой для перемещения вперед и назад по меньшей мере через часть из множества каналов. Процессор может определять положение одного или нескольких из множества каналов, основываясь на перемещении устройства слежения.
[0010] Иллюстративные варианты осуществления, описываемые в настоящем документе, обладают множеством преимуществ над современными системами и процессами, включая уменьшение лучевой нагрузки и гарантию точности планирования брахитерапии. Дополнительно, система и способ, описанные в настоящем документе, позволяют модифицировать существующие аппликаторы и не требуют производства аппликаторов со встроенными системами слежения. Другие дополнительные преимущества и выгоды станут ясны специалистам в данной области после прочтения и осмысления следующего подробного описания.
[0011] Специалисты в данной области поймут и оценят описанные выше и другие признаки и преимущества по настоящему описанию исходя из следующего подробного описания, рисунков и прилагаемой формулы изобретения.
[0012] На фиг.1 представлено схематическое изображение аппликатора для использования в брахитерапевтической системе по одному иллюстративному варианту осуществления;
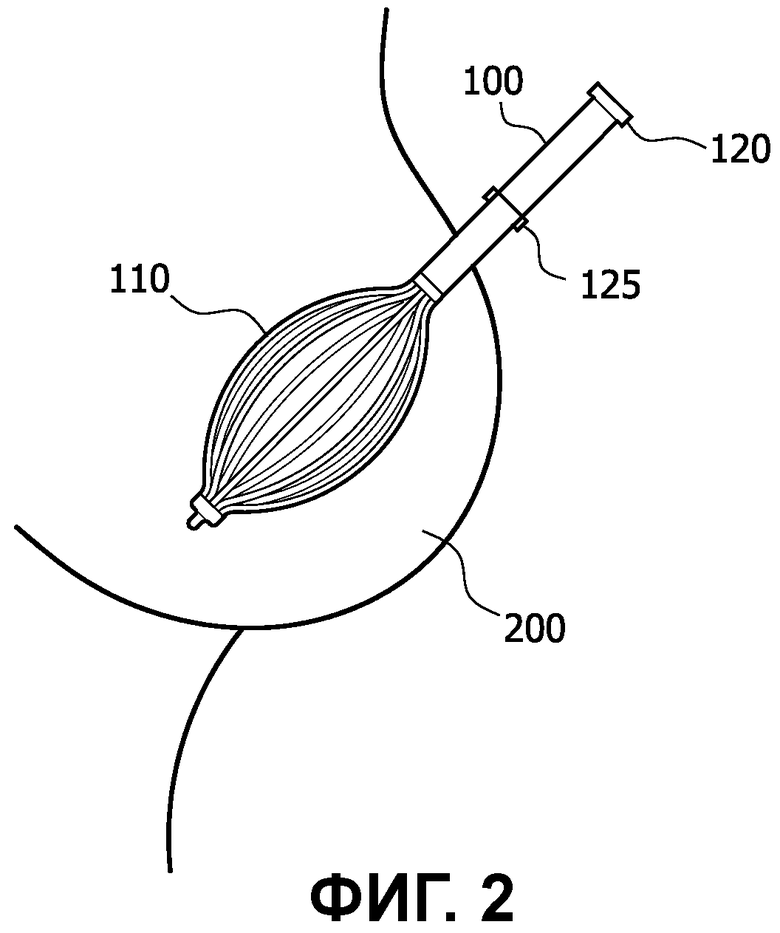
[0013] На фиг.2 представлен первый вид аппликатора для брахитерапии с фиг.1, имплантированного в целевую анатомическую структуру;
[0014] На фиг.3 представлен второй вид аппликатора для брахитерапии с фиг.1, имплантированного в целевую анатомическую структуру;
[0015] На фиг.4 представлено схематическое изображение целевой анатомической структуры, в которой расположена часть брахитерапевтической системы;
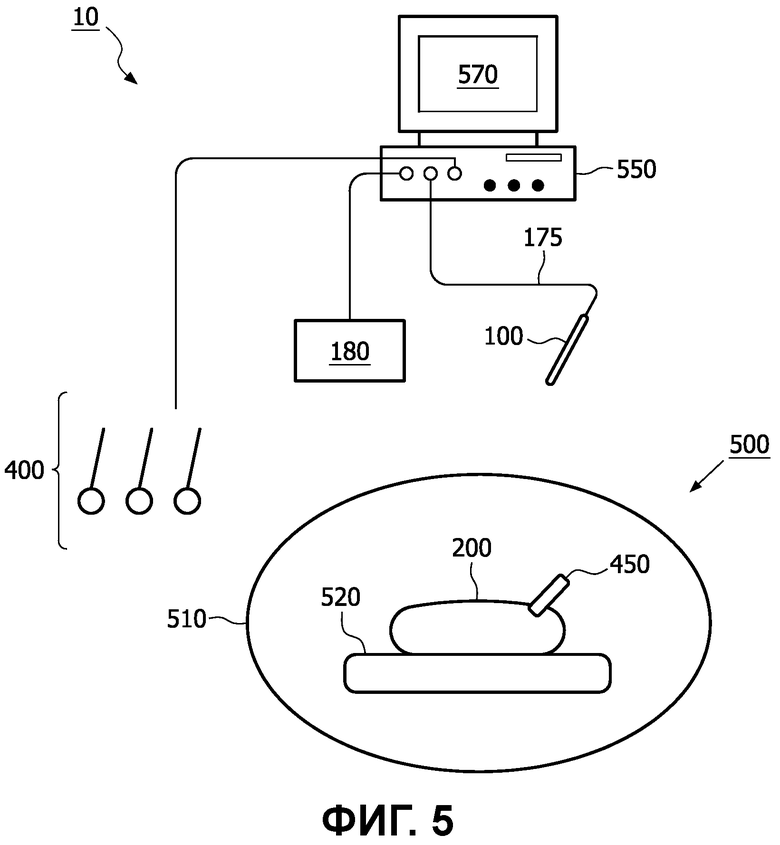
[0016] На фиг.5 представлено схематическое изображение брахитерапевтической системы; и
[0017] На фиг.6 представлен способ, который можно использовать в системе на фиг.1-5 для осуществления брахитерапии.
[0018] Иллюстративные варианты осуществления настоящего раскрытия описаны по отношению к брахитерапии с высокой мощностью дозы (HDR), применяемой у людей. Специалисту в данной области будет понятно, что иллюстративные варианты осуществления по настоящему раскрытию можно применять к другим типам брахитерапии и другим частям организма как человека, так и животного. Использование способа и системы по иллюстративным вариантам осуществления по настоящему раскрытию можно модифицировать для применения других типов аппликаторов. Использование способа и системы по иллюстративным вариантам осуществления по настоящему раскрытию можно модифицировать для применения в других типах терапии, включая в качестве неограничивающих примеров радиочастотную абляцию, низкотемпературную абляцию, микроволновую абляцию и лазерную абляцию.
[0019] На рисунках и, в частности, на фиг.1-5, брахитерапевтическая система 10 может содержать аппликатор 100 с множеством полых каналов или канюлю 110, тянущиеся от принимающего радиоактивное зерно конца 105 аппликатора к закрытому наконечнику 115 на противоположном конце аппликатора. Специалисту в данной области будет понятно, что конкретная форма каналов 110 может меняться, и может представлять собой распорки, зонды, трубки или другие структуры, которые позволяют направлять радиоактивное зерно вдоль них. Ротационная рукоятка 120 или другой исполнительный механизм может быть функционально соединен с полыми каналами 110 так, чтобы канал можно было избирательно радиально раскрывать (например, выгибать). Например, каналы 110 могут представлять собой гибкие трубки, которые сжимаются в осевом направлении при использовании ротационной рукоятки 120, в результате чего происходит деформация каналов радиально и наружу.
[0020] Раскрывающий механизм, такой как штанга с возвратно-поступательным движением, может функционировать посредством исполнительного механизма 120, чтобы раскрывать вставленную головную часть аппликатора 100, например, чтобы наконечник 115 и сжимающее кольцо 125 двигались по направлению друг к другу, заставляя каналы в головной части выгибаться наружу. Каналы можно раскрывать до состояния соответствующей болюсной конфигурации, чтобы расположить пути для доставки зерен, определяемые полыми каналами, рядом с тканью или другой целевой анатомической структурой, подлежащей облучению. Одним таким аппликатором, содержащим гибкие, деформируемые каналы, для такого лечения, является аппликатор Cianna SAVI™ HDR, поставляемый компанией Cianna Medical of Aliso Veijo, California. Как описано ниже, деформация наружу позволяет аппликатору 10 заполнять пустоту в целевой анатомической структуре так, чтобы эффективно доставлять туда лечение.
[0021] Брахитерапевтическая система 10 может содержать подвижный датчик слежения 175. Датчик 175 может представлять собой датчик электромагнитного поля, который принимает электромагнитные сигналы, которые генерирует генератор поля 180 или т.п. В одном из вариантов осуществления электромагнитный датчик 175 может быть соединен с проволокой или другим полужестким кабелем 150, который позволяет перемещать датчик через каждый канал 110 посредством толкающих и тянущих усилий. Можно использовать различные типы электромагнитных систем слежения.
[0022] В одном из вариантов осуществления генератор поля 180 может иметь множество антенн в различных ориентациях. Датчик 175 может получать сигналы от антенн в различных ориентациях вдоль различных положений каналов 110. Размещение датчика 175 относительно антенн можно определить исходя из относительных характеристик их сигналов, например относительной мощности сигнала, относительной фазы и т.д. В другом варианте осуществления датчик 175 может содержать приемные катушки или антенны в различных ориентациях. В одном из вариантов осуществления датчик 175 может быть связан с процессором 550 системы формирования изображения 500 посредством проволок, проходящих через или вдоль аппликатора 100, например, посредством проволоки 150. В другом варианте осуществления можно использовать беспроводной канал связи. Также предусмотрены другие типы аппликаторов и другие типы систем слежения.
[0023] В одном из вариантов осуществления в системе слежения можно использовать различные компоненты слежения, такие как компоненты, которые поставляет компания Traxtal Inc. или Northern Digital Inc. В качестве другого примера, в подвижном датчике слежения 175 можно использовать оптические способы и компоненты слежения, которые поставляет, например, Northern Digital Optotrak Certus Motion Capture System. В качестве датчика или излучателя размещения и регистратора или приемника размещения можно использовать другие способы и компоненты, включая ультразвуковые способы и компоненты.
[0024] Кроме того, способ брахитерапии, изображенный на фиг.6, как правило, обозначается номером позиции 600. Способ 600 можно использовать в лучевой терапии после процедур различных типов, например, после выполнения операции по удалению опухоли молочной железы для удаления злокачественной или потенциально злокачественной опухоли или другой нежелательной ткани из целевой анатомической структуры 200, которая показана расположенной на площадке или другой платформе 520. После хирургической операции на стадии 602 аппликатор 100 можно поместить в сложенном состоянии через разрез или другую точку входа в целевую анатомическую структуру, в том числе через зонд 450 или т.п. Сложенное состояние аппликатора 100 может включать то, что каждый полый канал 110 простирается параллельно и рядом с каждым другим каналом, чтобы минимизировать поперечное сечение аппликатора. В одном из вариантов осуществления аппликатор 100 можно расположить, используя ультразвуковую систему наведения, чтобы расположить аппликатор в выбранном положении, как правило, так, чтобы головная часть располагалась в объеме, который занимала опухоль. Также можно использовать другие системы наведения, включая другие способы формирования изображения. Используя исполнительный механизм 220 или какой-либо другой раскрывающий механизм, каналы 110 аппликатора 100 можно раскрыть до состояния соответствующей болюсной конфигурации, чтобы расположить пути доставки зерна, определяемые полыми каналами, рядом с той тканью, которая подлежит облучению.
[0025] После введения и расширения аппликатора, на стадии 604 на целевой анатомической структуре 200 можно закрепить множество маркеров или меток 400, например, один или несколько маркеров, вблизи от имплантированного аппликатора 100. Каждый маркер 400 может содержать электромагнитный блок датчиков и может быть визуализирован посредством способа формирования изображения высокого разрешения, например посредством КТ-сканера 500.
[0026] На стадии 606, высокоразрешающее изображение целевой области 200, включая аппликатор 100 и окружающую ткань, можно создать с помощью КТ-сканера 500 и сохранить в памяти изображений компьютерного томографа. В иллюстративных целях на фиг.5 представлено закрытое КТ сканирующее устройство 510, но в настоящем раскрытии рассмотрено использование различных устройств для формирования изображения, включая подвижный C-образный манипулятор или MRL.
[0027] На стадии 608, положение и ориентацию каждого маркера 400 получают, используя систему слежения, такую как электромагнитная система слежения, и генератор поля 180. Например, генератор поля 180 может генерировать электромагнитные сигналы, а маркеры 400, закрепленные на целевой анатомической структуре 200, могут принимать эти сигналы. Процессор 550 может определять положение и ориентацию маркеров 400 на основании полученных электромагнитных данных. Как описано выше, когда используют другие способы слежения, такие как ультразвуковые или оптические способы слежения, в системе слежения можно использовать эти способы, чтобы получить результаты измерения положения и ориентации маркеров 400.
[0028] На стадии 610, электромагнитный датчик 175 или другое подвижное устройство слежения можно расположить в одном из каналов 110 и продвигать вперед вдоль него, при этом получая результаты измерения электромагнитного поля или другого слежения. Эту процедуру можно повторять для каждого канала 110 и можно выполнять в процессе продвижения датчика 175 вперед и/или назад, например, используя проволоку 150. Проволоку 150 можно продвигать вперед и назад вручную через каналы 110. Однако в настоящем раскрытии рассматривается исполнительный механизм или другая сила для продвижения проволоки 150 вперед и назад, функционально связанная с проволокой, которую можно продвигать вперед и/или назад с регулируемой скоростью.
[0029] В способе 600 можно использовать электромагнитные данные для сегментации изображений КТ. На стадии 612 пользователь может идентифицировать отслеженные электромагнитные метки 400 на изображении КТ и использовать эту информацию для регистрации электромагнитных измерений в системе координат изображения КТ. Полученные показания можно использовать для переноса электромагнитных измерений положений каналов 110 из электромагнитной системы координат в систему координат изображения КТ. В другом варианте осуществления система 10 может регистрировать электромагнитные измерения в системе координат изображения КТ без вмешательства пользователя, например, при использовании проволоки 150, которую перемещают с регулируемой скоростью. На стадии 614 система 10 может графически отображать измеренную электромагнитную конфигурацию, наложенную на изображение КТ, например, используя дисплей 570. Затем пользователь может принять, отклонить или редактировать зарегистрированные результаты электромагнитного измерения положения распорки в виде точной сегментации, а затем продолжить планирование лучевой терапии.
[0030] Понятно, что использование маркеров 400 представляет собой один способ размещения каналов 110 на изображении, частично основанном на информации о результатах слежения. В настоящем раскрытии рассматриваются другие способы, используемые в дополнение к маркерам 400 или в качестве альтернативы. Например, в иллюстративных вариантах осуществления для размещения можно использовать алгоритмы корреляции или обработки изображений. Например, в алгоритмах корреляции изображений можно использовать один или несколько признаков, например, части аппликатора 100, которые видны на изображении и обладают известным положением.
[0031] В одном из вариантов осуществления процессор 550 может определять относительное размещение датчика 175 для различных положений вдоль каналов 110 по отношению к маркерам 400, закрепленным на пациенте, и создавать сенсорную карту. Когда маркеры 400 также видны на изображении КТ, можно узнать положение датчика 175 вдоль каналов 110 относительно маркеров в системе координат КТ-сканера и изображения КТ, которое он создает. В другом варианте осуществления различные положения или размещения датчика 175 с сенсорной карты по мере того, как он перемещается по каналам 110, можно наложить на изображение КТ, чтобы создать комбинированное изображение, которое можно хранить в памяти планирования сеансов.
[0032] В одном из вариантов осуществления информацию, полученную при формировании изображения и электромагнитном слежении, такую как комбинированное изображение, можно использовать в планировании сеансов брахитерапии для планирования брахитерапии. Это планирование сеансов может включать определение того, в какой канал поместят радиоактивное зерно; положение вдоль распорки для расположения зерна; и длительность размещения зерна в этом положении. Например, каждое радиоактивное зерно может генерировать известную дозу в единицу времени в каждой из множества, как правило, сферических областей, окружающих зерно. Располагая радиоактивное зерно в различных размещениях вдоль каналов 110 в течение различных периодов времени, можно регулировать общую дозу облучения в области окружающей ткани 200. При планировании сеансов лечащий онколог может определить желаемую дозу, которую следует доставить в каждую из одной или нескольких указанных областей окружающей ткани, а положение и длительность расположения одного или нескольких зерен можно вычислить для того, чтобы доставленное распределение дозы совпадало с желаемым распределением дозы. В одном из вариантов осуществления вычисления выполняет процессор 550, который запрограммирован соответствующим образом на создание плана лечения и оптимизацию положения зерен, например, на основе выбранного онкологом распределения дозы, введенного через графический пользовательский интерфейс процессора.
[0033] Затем можно использовать различные способы брахитерапии, основываясь на плане лучевой терапии, который разработан посредством использования системы 10. Например, используя запланированный сеанс терапии, можно запрограммировать систему подачи источника радиоактивного излучения, в который подходящее радиоактивное зерно(а) загружено и прикреплено к загрузочному концу аппликатора 100. В одном из вариантов осуществления каждое зерно может нести свой собственный электромагнитный датчик или другое устройство слежения для подтверждения положения зерна. Система подачи источника радиоактивного излучения может перемещать зерно через каждый из выбранных каналов 110 в каждое из вычисленных положений или размещений вдоль каналов в течение вычисленной длительности расположения. В другом варианте осуществления зерна можно перемещать в положения вдоль каналов, используя другие устройства и другую информацию, такую как результаты измерения перемещения устройства, которое функционально связано с зерном (например, длина, на которую проволока прошла в аппликатор).
[0034] Сеансы брахитерапии можно проводить несколько раз в сутки в течение нескольких суток, с использованием аппликатора, который остается имплантированным на протяжении сеансов. В одном из вариантов осуществления способ 600 или его части можно повторять, чтобы подтверждать, что аппликатор не сместился. В другом варианте осуществления процессор 550 может сравнивать данные о положении (т.е., недавно полученные данные о положении распорки) с исходными данными о положении распорки, чтобы определить, что произошло смещение аппликатора 100 внутри целевой анатомической структуры 200. Если процессор 550 определяет, что произошло изменение положения, можно попытаться изменить положение аппликатора 100, причем при попытках вернуть аппликатор обратно в его исходное положение и ориентацию или как можно ближе к ним выполняются дополнительные измерения электромагнитного датчика 175.
[0035] Если аппликатор 100 не находится в исходном положении, в котором планировали проводить терапию, процессор 550 может определить преобразование между текущим и исходным размещениями аппликатора относительно маркеров 400 и целевой анатомической структуры 200. Процессор может использовать это преобразование для работы с запланированным образом, например, из памяти запланированных образов, чтобы сместить относительные размещения аппликатора 100 и целевой области 200 в соответствии с преобразованием, чтобы сформировать преобразованный образ запланированной терапии. Процессор 550 может использовать эту информацию о смещении для создания нового плана брахитерапии. Новый план брахитерапии можно загрузить в систему подачи источника радиоактивного излучения, после чего можно начинать следующий сеанс брахитерапии.
[0036] В одном из вариантов осуществления во время доставки дозы, положения каналов 110 и зерна можно отслеживать во время доставки дозы посредством электромагнитного датчика или другого устройства слежения, соединенного с зерном. Например, целевую ткань 200 можно разделить на трехмерные (3D) подобласти. Отслеженные посредством электромагнитного поля размещения зерен можно наносить на карты 3D подобластей, и накопленную дозу в каждой подобласти можно непрерывно или периодически обновлять или увеличивать на основе времени и расстояния от источника, что позволяет клиницисту и/или процессору 550 отслеживать доставленную дозу. Если обнаружено отклонение от плана брахитерапии, можно создать обновленный план доз на основе отклонения (например, изменить длительность расположения зерна в следующем положении и так далее) и/или остановить лечение. Слежение за положениями каналов и зерна во время сеанса брахитерапии гарантирует, что аппликатор не будет двигаться во время сеанса, и, если произойдет какое-либо смещение, калькулятор плана лечения может повторно вычислить план брахитерапии в реальном времени. Обратную связь положения зерна от устройства слежения, соединенного с зерном, также можно использовать для создания записи плана лечения или карты облучения, на которой показано излучение, фактически доставленное в каждом сеансе.
[0037] В одном из вариантов осуществления визуализацию аппликатора 100 после установки хирургическим путем можно выполнить, используя ЯМР или ультразвуковую (например, 3D УЗИ) визуализацию. В настоящем раскрытии также рассматривается использование автоматической идентификации отслеживаемых посредством электромагнитного поля координатных маркеров 400 на изображении (КТ, ЯМР и/или УЗИ). В одном из вариантов осуществления система 10 может графически отобразить измеренную конфигурацию электромагнитного поля, наложенную на изображение (КТ, ЯМР и/или УЗИ), где пользователь может избирательно объединять конфигурацию электромагнитного поля и изображение. В другом варианте осуществления система 10 может использовать зарегистрированные результаты электромагнитного измерения положений распорки для инициализации автоматической оптимизации процесса сегментации.
[0038] Несмотря на описание со ссылкой на молочную железу, также рассмотрены другие способы брахитерапии, например, брахитерапия простаты, головы, шеи и органов женской половой системы.
[0039] Настоящее изобретение, включая стадии описанных выше способов, можно реализовать в аппаратном обеспечении, программном обеспечении или в комбинации аппаратного и программного обеспечения. Изобретение можно реализовать централизованным образом в виде одной компьютерной системы, или распределенным образом, когда различные элементы распределены по нескольким взаимосвязанным компьютерным системам. Подходит компьютерная система любого типа или другое устройство, приспособленное для осуществления способов, описанных в настоящем документе. Типовая комбинация аппаратного и программного обеспечения может представлять собой компьютерную систему общего назначения с компьютерной программой, которая, при загрузке и выполнении, управляет компьютерной системой так, что она осуществляет способы, описанные в настоящем документе.
[0040] Настоящее изобретение, включая стадии описанных выше способов, можно реализовать в компьютерном программном продукте. Компьютерный программный продукт может содержать машиночитаемый носитель информации, на котором находится компьютерная программа, содержащая исполняемый компьютером код для управления вычислительным устройством или автоматизированной системой для выполнения различных процедур, процессов и способов, описанных в настоящем документе. В данном контексте компьютерная программа означает любое выражение на любом языке, код или обозначение набора инструкций, предназначенных для управления системой, которая обладает способностью к обработке информации, для выполнения конкретной функции или напрямую, или после одной, или обеих следующих стадий: a) преобразование в другой язык, код или обозначение; b) воспроизведение в другой материальной форме.
[0041] Иллюстрации вариантов осуществления, описанных в настоящем документе, предназначены для того, чтобы обеспечить общее понимание структуры различных вариантов осуществления, и не предназначены для того, чтобы выполнять функцию полного описания всех элементов и признаков устройств и систем, в которых можно использовать структуры, описанные в настоящем документе. После ознакомления с приведенным выше описанием специалистам в данной области станут очевидны многие другие варианты осуществления. Их можно использовать или получить из них другие варианты осуществления, так что структурные и логические замены и изменения можно выполнять без отступления от объема данного раскрытия. Рисунки выполняют лишь иллюстративную роль и могут быть выполнены не в масштабе. Некоторые их пропорции могут быть увеличены, тогда как другие могут быть уменьшены. Таким образом, описание и рисунки следует рассматривать в иллюстративном, а не в ограничивающем смысле.
[0042] Таким образом, несмотря на то, что в настоящем документе проиллюстрированы и описаны конкретные варианты осуществления, следует принимать во внимание то, что конкретные представленные варианты осуществления можно заменить любой конфигурацией, рассчитанной для достижения той же цели. Данное раскрытие предназначено для того, чтобы покрывать любые и все модификации или разновидности различных вариантов осуществления. Комбинации описанных выше вариантов осуществления и других вариантов осуществления, которые в настоящем документе не описаны конкретно, будут очевидны специалистам в данной области после ознакомления с приведенным выше описанием. Следовательно, подразумевается, что раскрытие не ограничено конкретным одним или несколькими вариантами осуществления, раскрытыми в качестве лучшего рассмотренного варианта осуществления настоящего изобретения, но что изобретение включает все варианты осуществления, попадающие в объем приложенной формулы изобретения.
[0043] Реферат и раскрытие предоставлены для соблюдения 37 C.F.R. § 1.72(b), который требует, чтобы реферат позволял читателю быстро определить техническую природу раскрытия. Он представлен в рамках договоренности о том, что его не следует использовать для интерпретации или ограничения объема или значения формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНОЕ ОБНАРУЖЕНИЕ ПОЛОЖЕНИЯ АППЛИКАТОРА ДЛЯ БРАХИТЕРАПИИ С ВЫСОКОЙ МОЩНОСТЬЮ ДОЗЫ | 2008 |
|
RU2493891C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БРАХИТЕРАПИИ, ОТЛИЧАЮЩИЕСЯ ОТСЛЕЖИВАНИЕМ ПОСРЕДСТВОМ ВОСПРИЯТИЯ ФОРМЫ | 2010 |
|
RU2551931C2 |
| СИСТЕМА ДЛЯ ПОДДЕРЖКИ ВЫПОЛНЕНИЯ ИНТЕРВЕНЦИОННЫХ ПРОЦЕДУР | 2017 |
|
RU2746151C2 |
| МЕДИЦИНСКИЙ ИНСТРУМЕНТ ДЛЯ ВЫСОКОДОЗНОЙ БРАХИТЕРАПИИ | 2015 |
|
RU2689179C2 |
| КАЛИБРОВОЧНОЕ ПРИСПОСОБЛЕНИЕ | 2013 |
|
RU2650037C2 |
| Устройство для калибровки аппарата гамма-терапевтического контактного облучения при брахитерапии | 2023 |
|
RU2825054C1 |
| СБОРНЫЙ УЗЕЛ ИСТОЧНИКА ДЛЯ БРАХИТЕРАПИИ | 2012 |
|
RU2612543C2 |
| СПОСОБ И СИСТЕМА ЭЛЕКТРОМАГНИТНОГО СЛЕЖЕНИЯ В МЕДИЦИНСКОЙ ПРОЦЕДУРЕ | 2009 |
|
RU2519300C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБУЧАЮЩИХСЯ МОДЕЛЕЙ ПЛАНОВ РАДИОТЕРАПЕВТИЧЕСКОГО ЛЕЧЕНИЯ С ПРОГНОЗИРОВАНИЕМ РАСПРЕДЕЛЕНИЙ ДОЗЫ РАДИОТЕРАПИИ | 2017 |
|
RU2719028C1 |
| БРАХИТЕРАПЕВТИЧЕСКОЕ АППЛИКАТОРНОЕ УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ В ПОЛОСТЬ ТЕЛА | 2011 |
|
RU2565100C2 |




Группа изобретений относится к медицине. Брахитерапевтическая система содержит: аппликатор для позиционирования радиоактивной гранулы, имеющий множество полых и расширяемых каналов, устройство слежения, включающее датчик, содержащий катушки или антенны, которые имеют различные ориентации относительно положения датчика, генератор сигналов слежения, выполненный с возможностью генерации сигнала, принимаемого устройством слежения, и процессор. Причем размер и форма устройства слежения позволяют ему перемещаться вперед и назад через множество каналов. Процессор выполнен с возможностью получения измерений положения от устройства слежения во время перемещения устройства слежения, определения положения множества каналов, определения размещения множества каналов на изображении, основываясь на упомянутом измерении положения от устройства слежения, и создания плана брахитерапии для введения дозы облучения. Машиночитаемый носитель информации содержит исполняемый компьютером код, реализующий этапы способа применения брахитерапевтической системы. Группа изобретений позволяет уменьшить лучевую нагрузку и повысить точность планирования брахитерапии. 3 н. и 13 з.п. ф-лы, 6 ил.
1. Машиночитаемый носитель информации, на котором хранится исполняемый компьютером код, причем упомянутый исполняемый компьютером код выполнен с возможностью вынуждения процессора вычислительного устройства, в которое загружен машиночитаемый носитель информации, выполнять следующие этапы:
определение положения одного или более из множества полых каналов (110) аппликатора (100) для позиционирования радиоактивной гранулы относительно целевой области (200), основываясь на измерениях положения, полученных во время движения устройства слежения (175), имеющего катушки или антенны, через по меньшей мере часть из упомянутого множества полых каналов, и
создание по меньшей мере части плана брахитерапии для введения дозы облучения, основываясь на упомянутом положении упомянутых одного или более из упомянутого множества полых каналов.
2. Машиночитаемый носитель информации по п.1, который дополнительно содержит исполняемый компьютером код для вынуждения процессора вычислительного устройства использовать электромагнитные сигналы для определения положения упомянутых одного или более из упомянутого множества полых каналов (110), где полые каналы представляют собой расширяемые каналы посредством выгибания наружу.
3. Машиночитаемый носитель информации по п.1, который дополнительно содержит исполняемый компьютером код для вынуждения процессора вычислительного устройства определять положение одного или более из множества полых каналов (110), основываясь, в частности, на одном или более маркерах, соединенных с внешней частью целевой области.
4. Машиночитаемый носитель информации по п.3, который дополнительно содержит исполняемый компьютером код для вынуждения процессора вычислительного устройства:
получать изображение целевой области (200), содержащей в ней один или более маркеров (400); и
регистрировать положение одного или более из множества полых каналов (110), основываясь, по меньшей мере частично, на упомянутых одном или более маркерах.
5. Машиночитаемый носитель информации по п.4, который дополнительно содержит исполняемый компьютером код для вынуждения процессора вычислительного устройства выполнять по меньшей мере одно из формирования изображения компьютерной томографии, магниторезонансного формирования изображения и ультразвукового формирования изображения, чтобы получить изображение целевой области (200).
6. Машиночитаемый носитель информации по п.4, который дополнительно содержит исполняемый компьютером код для вынуждения процессора вычислительного устройства отображать изображение с наложенным на него геометрическим изображением, представляющим один или более из упомянутого множества полых каналов (110).
7. Брахитерапевтическая система (10) для целевой области (200), причем система содержит:
аппликатор (100) для позиционирования радиоактивной гранулы, имеющий множество каналов (110), которые являются полыми и расширяемыми, причем упомянутый аппликатор является имплантируемым в целевую область;
устройство слежения (175), имеющее катушки или антенны;
генератор сигналов слежения (180), выполненный с возможностью генерации сигнала, принимаемого устройством слежения; и
процессор (550),
причем устройство слежения имеет размер и форму для перемещения вперед и назад через по меньшей мере часть из упомянутого множества каналов,
причем процессор выполнен с возможностью получения измерений положения от устройства слежения во время перемещения устройства слежения через упомянутые по меньшей мере часть из упомянутого множества каналов, и определения положения одного или более из упомянутого множества каналов, основываясь на измерениях положения, полученных во время упомянутого перемещения устройства слежения, и
причем процессор дополнительно выполнен с возможностью определения размещения одного или более из упомянутого множества каналов на изображении, основываясь, по меньшей мере частично, на упомянутом измерении положения от устройства слежения, и
процессор дополнительно выполнен с возможностью создания плана брахитерапии для введения дозы облучения, основываясь на положении упомянутых одного или более из упомянутого множества каналов.
8. Система по п.7, которая дополнительно содержит один или более координатных маркеров (400), находящихся в связи с генератором сигналов слежения (180) и закрепляемых на внешней части целевой области, при этом процессор (550) определяет размещение одного или более из упомянутого множества каналов на изображении, основываясь, в частности, на упомянутых одном или более координатных маркерах.
9. Система по п.7, в котором устройство слежения (175) содержит электромагнитный датчик, расположенный на конце проволоки (150), и при этом план брахитерапии для введения дозы облучения в целевую область содержит положение радиоактивного зерна относительно одного из упомянутого множества каналов (110) и длительность нахождения в упомянутом положении зерна.
10. Система по п.8, которая дополнительно содержит устройство формирования изображения, которое получает изображение целевой области (200), содержащее один или более координатных маркеров (400), при этом процессор (550) дополнительно выполнен с возможностью регистрации положения одного или более из упомянутого множества каналов (110), основываясь, по меньшей мере частично, на одном или более координатных маркерах, при этом устройство формирования изображения выполняет по меньшей мере одно из формирования изображения компьютерной томографии, магниторезонансного формирования изображения и ультразвукового формирования изображения, чтобы получить изображение.
11. Система по п.7, в которой процессор дополнительно выполнен с возможностью определения размещения упомянутого одного или более из упомянутого множества каналов на изображении, основываясь, в частности, на алгоритмах корреляции изображений, которые используют один или более признаков, представленных на изображении.
12. Система по п.7, в которой упомянутое множество полых каналов являются расширяемыми посредством выгибания наружу, и в которой процессор выполнен с возможностью определения, какой из упомянутого множества полых каналов принимает радиоактивное зерно, на основании положения упомянутых одного или более из упомянутого множества каналов.
13. Брахитерапевтическая система (10) для целевой области (200), причем система содержит:
аппликатор (100) для позиционирования радиоактивной гранулы, имеющий множество каналов (110), которые являются полыми и расширяемыми, причем аппликатор имплантирован в целевую область;
устройство слежения (175), содержащее датчик, имеющий катушки или антенны;
генератор сигнала слежения (180), выполненный с возможностью генерации сигнала, который принимает устройство слежения; и
процессор (550),
при этом устройство слежения имеет размер и форму для перемещения вперед и назад через по меньшей мере часть из упомянутого множества каналов, и при этом катушки или антенны устройства слежения имеют различные ориентации относительно положения датчика,
при этом процессор выполнен с возможностью получения измерений положения от устройства слежения во время перемещения упомянутого устройства слежения через по меньшей мере часть из упомянутого множества каналов, и определения положения одного или более из упомянутого множества каналов, основываясь на измерениях положения, полученных во время перемещения устройства слежения, и
при этом процессор дополнительно выполнен с возможностью определения размещения одного или более из упомянутого множества каналов на изображении, основываясь, по меньшей мере частично, на измерении положения от устройства слежения, и
при этом процессор дополнительно выполнен с возможностью создания плана брахитерапии для введения дозы облучения, основываясь на положении упомянутых одного или более из упомянутого множества каналов.
14. Система по п.13, которая дополнительно содержит один или более координатных маркеров (400), находящихся в связи с генератором (180) сигналов слежения и помещаемых на внешней части целевой области, при этом процессор (550) определяет размещение упомянутых одного или более из упомянутого множества каналов на изображении, основываясь, в частности, на одном или более координатных маркерах, и при этом генератор (180) сигналов слежения имеет множество антенн в различных ориентациях вдоль положений упомянутых каналов.
15. Система по п.14, которая дополнительно содержит устройство формирования изображения, которое получает изображение целевой области (200), содержащее упомянутые один или более координатных маркеров (400), при этом процессор (550) регистрирует положение одного или более из упомянутого множества каналов (110), основываясь, по меньшей мере частично, на одном или более координатных маркерах, при этом устройство формирования изображения осуществляет по меньшей мере одно из формирования изображения компьютерной томографии, магниторезонансного формирования изображения и ультразвукового формирования изображения, чтобы получить изображение.
16. Система по п.13, в которой процессор определяет размещение упомянутых одного или более из упомянутого множества каналов на изображении, основываясь, в частности, на алгоритмах корреляции изображений, которые используют один или более признаков, представленных на изображении.
| WO 2008045812 A1, 17.04.2008 | |||
| РАДИОАКТИВНЫЙ ИСТОЧНИК ДЛЯ ИСПОЛЬЗОВАНИЯ В БРАХИТЕРАПИИ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ (ВАРИАНТЫ), СПОСОБ ЛЕЧЕНИЯ С ЕГО ИСПОЛЬЗОВАНИЕМ И КОМПОЗИЦИЯ НА ЕГО ОСНОВЕ | 1999 |
|
RU2251437C2 |
| СПОСОБ ПРЕДЛУЧЕВОЙ ТОПОМЕТРИИ ОБРАЗОВАНИЙ ГОЛОВЫ | 2002 |
|
RU2228139C2 |
| US 20070232882 A1, 04.10.2007 | |||
| Watanabe Yoichi et al, A system for nonradiographic source localization and real-time planning of intraoperative high dose rate brachytherapy, Med | |||
| Phys | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |

