ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к системе, способу и компьютерной программе для выполнения терапевтической процедуры.
УРОВЕНЬ ТЕХНИКИ
Система для выполнения терапевтической процедуры представляет собой, например, систему брахитерапии с высокой мощностью дозы облучения (HDR). Система HDR брахитерапии содержит катетер брахитерапии, который вводится в обрабатываемый объект, такой как предстательная железа пациента. В пределах катетера брахитерапии, источник радиоактивного излучения перемещается в различные положения облучения, в которых источник радиоактивного излучения располагается в течение соответствующего времени облучения, причем объект обрабатывается радиоактивным излучением, испускаемым источником радиоактивного излучения в различных положениях облучения в течение соответствующих времен облучения.
Во время перемещения источника радиоактивного излучения в различные положения облучения возможны трудности с определением того, находится ли соответствующее положение облучения в катетере брахитерапии внутри пациента, или оно находится вне пациента. Если положение облучения, в котором источник радиоактивного излучения располагается в течение времени облучения, находится вне пациента, эпидерма пациента и окружение, в частности медицинский персонал, выполняющий процедуру HDR брахитерапии, могут быть подвергнуты радиоактивному облучению.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в создании системы, способа и компьютерной программы для выполнения терапевтической процедуры, в которой вероятность нежелательного воздействия терапевтической процедуры на окружающих людей может быть снижена.
В первом аспекте настоящего изобретения представлена система выполнения терапевтической процедуры, причем система содержит:
- удлиненный вводимый элемент для введения в тело,
- блок определения температуры для определения температуры вдоль вводимого элемента,
- блок определения внутренней части для определения того, какая часть вводимого элемента находится внутри тела на основании определенной температуры, и
- блок выполнения терапевтической процедуры для выполнения терапевтической процедуры посредством использования вводимого элемента в зависимости от определения того, какая часть вводимого элемента находится внутри тела.
Поскольку температура вдоль вводимого элемента определяется и используется для определения того, какая часть вводимого элемента находится внутри тела, и поскольку терапевтическая процедура, использующая вводимый элемент, выполняется в зависимости от определения того, какая часть вводимого элемента находится внутри тела, терапевтическая процедура может быть выполнена таким образом, чтобы она выполнялась только внутри тела. Это позволяет обеспечить снижение вероятности нежелательного воздействия терапевтической процедуры, например, на эпидерму пациента и на окружение, в частности, на медицинский персонал.
Удлиненный вводимый элемент предпочтительно представляет собой катетер, в частности, катетер брахитерапии. Блок определения температуры предпочтительно выполнен с возможностью определения температуры вдоль вводимого элемента в реальном времени, таким образом, что также определение того, какая часть вводимого элемента находится внутри тела, может быть выполнено в реальном времени.
В варианте осуществления вводимый элемент представляет собой катетер, и блок выполнения терапевтической процедуры содержит a) блок перемещения для перемещения источника излучения в положение облучения для терапевтической обработки тела в положении облучения в пределах катетера, и b) блок управления брахитерапией для управления блоком перемещения таким образом, чтобы положение облучения находилось в пределах части катетера, которая была определена как находящаяся внутри тела. Источник излучения, который предпочтительно является источником радиоактивного излучения, предпочтительно является стационарным только в положении облучения, причем предполагается, что терапевтическая процедура выполняется только в положении облучения, поскольку излучение в этом положении, испускаемое источником излучения, выполняется в течение времени достаточного для обеспечения терапевтического эффекта. Таким образом, управляя блоком перемещения так, чтобы положение облучения находилось в пределах части катетера, которая была определена как находящаяся внутри тела, можно быть уверенным в том, что терапевтическая процедура выполняется только внутри тела, тем самым, снижая вероятность того, что, например, эпидерма пациента и окружение, в частности, медицинский персонал, подвергаются излучению, испускаемому источником излучения. Катетер и блок выполнения терапевтической процедуры предпочтительно выполнен с возможностью выполнения HDR брахитерапии.
Вводимый элемент предпочтительно содержит оптическое волокно для формирования оптических сигналов, указывающих температуру вдоль вводимого элемента, причем блок определения температуры предпочтительно выполнен с возможностью определения температуры вдоль вводимого элемента на основании формируемых оптических сигналов. При определении температуры вдоль вводимого элемента на основании оптических сигналов, температура может быть определена с высокой степенью точности. Кроме того, посредством использования оптоволоконного измерения, температура может быть определена бесконтактным образом, то есть пользователю не нужно управлять дополнительным устройством измерения температуры.
Предпочтительно оптическое волокно обеспечено оптическими температурными датчиками, причем процесс измерения включает в себя обработку отраженного света, который принимается от оптических температурных датчиков после испускания света в оптическое волокно. В варианте осуществления, оптические температурные датчики представляют собой волоконные Брэгговские решетки, которые отражают определенную часть поступающего спектра в качестве функции температурно-зависимого механического напряжения. Отраженный свет, то есть сформированные оптические сигналы, могут быть затем использованы блоком определения температуры для определения температуры вдоль вводимого элемента. Вводимый элемент предпочтительно содержит несколько оптических волокон, в частности, три или более оптических волокон, причем каждое оптическое волокно может обеспечиваться волоконными Брэгговскими решетками, и оптические сигналы всех оптических стекловолокон могут быть использованы для определения температуры вдоль вводимого элемента. Дополнительная информация относительно оптоволоконного измерения температуры приводится, например, в книге ʺFiber Optic Sensorsʺ под редакцией F.T.S. Yu и S. Yin, Marcel Dekker, Inc. (2002), в частности в главе 4 этой книги, которая включена в настоящий документ путем ссылки.
Блок определения внутренней части предпочтительно выполнен с возможностью определения того, какая часть вводимого элемента находится внутри тела посредством определения повышения или понижения температуры вдоль вводимого элемента. Например, по длине вводимого элемента могут быть определены температурные градиенты, и ограничены пороговыми значениями для определения того, какая часть вводимого элемента находится внутри тела. Поскольку предполагается, что температура внутри тела является выше (например, приблизительно 37 градусов Цельсия) и вне тела - ниже (например, приблизительно 20 градусов Цельсия), то посредством определения повышения или понижения температуры вдоль вводимого элемента, например, посредством определения пространственных градиентов и пороговых значений пространственных градиентов, местоположение вдоль вводимого элемента, в котором вводимый элемент входит в тело, и, соответственно, может быть достоверно определена часть вводимого элемента внутри тела и часть вводимого элемента вне тела.
В варианте осуществления блок определения внутренней части выполнен с возможностью определения того, какая часть вводимого элемента находится внутри тела путем моделирования термодинамических свойств тела и/или окружающей среды и/или вводимого элемента и путем использования определенной температуры вдоль вводимого элемента. При учете не только определенной температуры вдоль вводимого элемента, но также и термодинамических свойств тела и/или окружающей среды и/или вводимого элемента может быть дополнительно повышена точность определения того, какая часть вводимого элемента находится внутри тела.
Система может дополнительно содержать блок определения глубины для определения глубины вводимого элемента внутри тела на основании определенной внутренней части вводимого элемента, причем определенная глубина может быть показана пользователю. Кроме того, блок определения глубины может быть дополнительно выполнен с возможностью определения отклонения определяемой глубины вводимого элемента от заданной глубины и указания отклонения. Заданная глубина может быть предшествующей глубиной, которая была определена ранее, для определения того, изменилась ли глубина во времени. Заданная глубина может также, например, задаваться пользователем. Если имеется отклонение, в частности, если отклонение больше, чем заданная пороговая величина отклонения, то может формироваться сигнал оповещения для вызова пользователя. В качестве альтернативы или дополнения терапевтическая процедура может быть остановлена, то есть, например, в случае HDR брахитерапии, источник излучения может быть извлечен из катетера, если отклонение указывает, что катетер был перемещен слишком глубоко во время подачи излучения.
Система может дополнительно содержать блок обеспечения целевой глубины для обеспечения целевой глубины вводимого элемента, и блок формирования руководящей информации для формирования руководящей информации, указывающей на движение вводимого элемента, которая позволяла бы вводимому элементу достигать целевой глубины, на основании обеспеченной целевой глубины и определенной глубины вводимого элемента. Руководящая информация может указать, например, что вводимый элемент должен быть перемещен дополнительно в тело на определенное расстояние. Эта руководящая информация может быть дана в реальном времени, таким образом, что пользователь может руководствоваться руководящей информацией при введении вводимого элемента в тело.
В варианте осуществления система дополнительно содержит a) блок определения положения для определения положения вводимого элемента внутри тела, b) блок обеспечения изображения тела для обеспечения изображения тела, причем обеспеченное изображение тела совмещается с определенным положением вводимого элемента, и c) блок формирования изображения вводимого элемента для формирования изображения вводимого элемента, показывающего представление вводимого элемента в пределах изображения объекта на основании определенного положения вводимого элемента внутри тела и на основании изображения тела. Таким образом, положение вводимого элемента относительно тела может быть показано, в частности, в реальном времени, тем самым, позволяя пользователю контролировать процесс введения. В варианте осуществления блок формирования изображения вводимого элемента выполнен с возможностью формирования изображения вводимого элемента, таким образом, что показывается только представление внутренней части или внешней части вводимого элемента на основании определения того, какая часть вводимого элемента находится внутри тела. Однако, в другом варианте осуществления, также весь вводимый элемент может быть представлен в изображении вводимого элемента.
Вводимый элемент предпочтительно содержит оптическое волокно для распознавания формы для формирования оптических сигналов распознавания формы, указывающих положение вводимого элемента внутри тела, причем блок определения положения выполнен с возможностью определения положения вводимого элемента внутри тела на основании сформированных оптических сигналов распознавания формы. Поскольку положение вводимого элемента определяется на основании оптических сигналов распознавания формы, положение может быть определено с высокой степенью точности бесконтактно по отношению к пользователю, то есть не требуя от пользователя использования дополнительных средств обнаружения положения, таких как электромагнитные средства обнаружения положения. Оптическое волокно для распознавания формы предпочтительно содержит волоконные Брэгговские решетки для формирования оптических сигналов, то есть оптических сигналов распознавания формы, указывающих механическое напряжение в местоположениях, в которых имеются волоконные Брэгговские решетки, причем механическое напряжение вдоль оптического волокна может быть проинтегрировано для определения формы и, вместе с известным положением точки или доли вводимого элемента, положения всего вводимого элемента. Вводимый элемент предпочтительно содержит несколько оптических волокон, в частности, три или более оптических волокон, причем каждое оптическое волокно может быть обеспечено волоконными Брэгговскими решетками, и оптические сигналы всех оптических волокон могут быть использованы для определения положения вводимого элемента, то есть положения каждого участка вводимого элемента. Дополнительная информация относительно оптоволоконного измерения положения приводится, например, в книге "Fiber Optic Sensors" под редакцией F.T.S. Yu и S. Yin, Marcel Dekker, Inc. (2002), в частности в главе 4 этой книги, которая включена в настоящий документ путем ссылки. Кроме того, те же самые оптические сигналы распознавания формы могут также быть использованы для определения температуры вдоль вводимого элемента, таким образом, что функциональные возможности определения положения и функциональные возможности определения температуры могут быть обеспечены в одиночном малогабаритном устройстве.
Блок обеспечения изображения тела предпочтительно выполнен с возможностью обеспечения положения места введения, в котором вводимый элемент вводится в тело, относительно обеспеченного изображения тела, и для совмещения изображения тела с положением вводимого элемента на основании обеспеченного положения места введения и ближайшего конца определяемой внутренней части вводимого элемента. Таким образом, изображение тела может быть совмещено с положением вводимого элемента относительно простым способом посредством использования ближайшего конца определяемой внутренней части вводимого элемента, который задает положение, в котором вводимый элемент входит в тело. Определение того, какая часть вводимого элемента находится внутри тела, может, поэтому, быть использовано не только для управления терапевтическим процессом, но также и для совмещения положения вводимого элемента с обеспеченным изображением тела. Также это приводит к чрезвычайно малогабаритной системе, которая может быть применена пользователем относительно простым образом. Положение места введения относительно обеспеченного изображения тела может быть обеспечено блоком обеспечения изображения тела посредством использования алгоритмов обработки изображения, в частности, алгоритмов сегментации, для регистрации места введения в пределах изображения тела.
В дополнительном аспекте настоящего изобретения представлен способ выполнения терапевтической процедуры, причем способ содержит этапы, на которых:
- определяют температуру вдоль вводимого элемента, который был введен в тело, посредством блока определения температуры,
- определяют, какая часть вводимого элемента находится внутри тела, на основании определенной температуры, посредством блока определения внутренней части,
- выполняют терапевтическую процедуру посредством использования вводимого элемента в зависимости от определения того, какая часть вводимого элемента находится внутри тела, посредством блока выполнения терапевтической процедуры.
В дополнительном аспекте настоящего изобретения представлена компьютерная программа для выполнения терапевтической процедуры, причем компьютерная программа содержит программное кодовое средство, побуждающее систему по пункту 1 формулы изобретения выполнять этапы способа по пункту 14 формулы изобретения, когда компьютерная программа выполняется на компьютере, управляющем системой.
Следует понимать, что система для выполнения терапевтической процедуры по пункту 1 формулы изобретения, способ выполнения терапевтической процедуры по пункту 14 формулы изобретения и компьютерная программа для выполнения терапевтической процедуры по пункту 15 формулы изобретения имеют аналогичные и/или одинаковые предпочтительные варианты осуществления, в частности, как определено в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления настоящего изобретения может также представлять собой любое сочетание зависимых пунктов формулы изобретения или сочетание вышеприведенных вариантов осуществления с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты изобретения будут очевидны из пояснений со ссылкой на описанные ниже варианты осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На следующих чертежах:
Фиг.1 схематично и примерно изображает вариант осуществления системы для выполнения терапевтической процедуры,
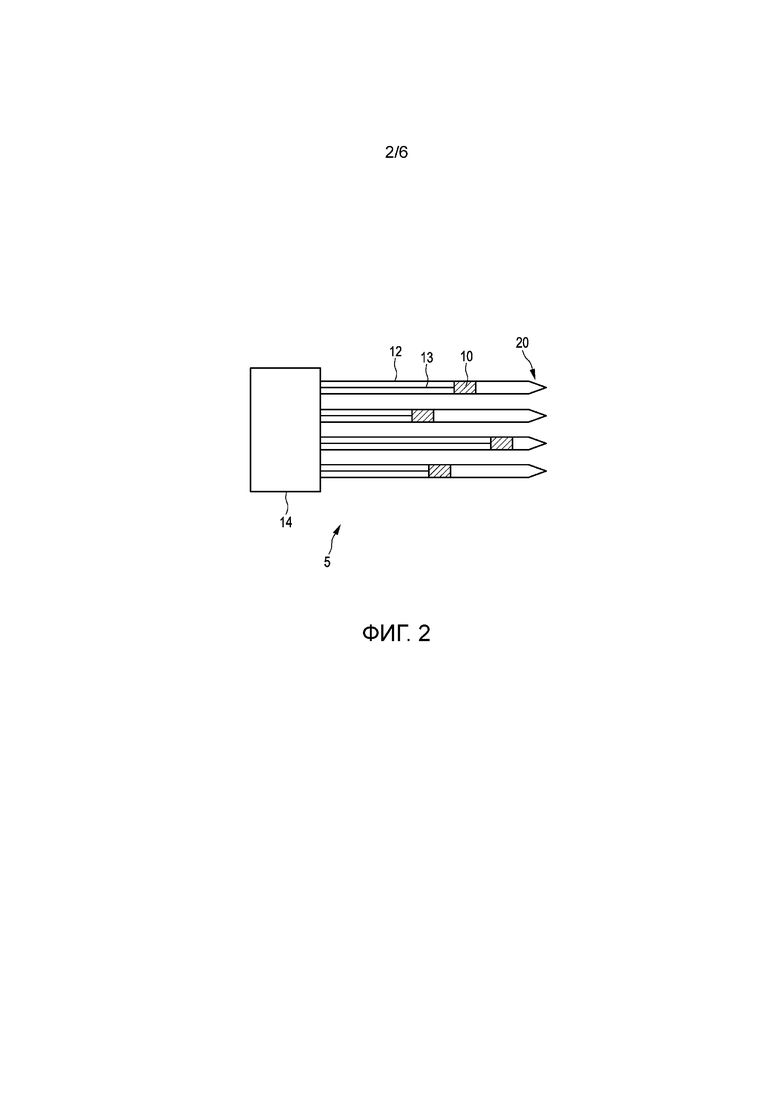
Фиг.2 схематично и примерно изображает вводимые элементы системы, вводимые в тело для выполнения терапевтической процедуры,
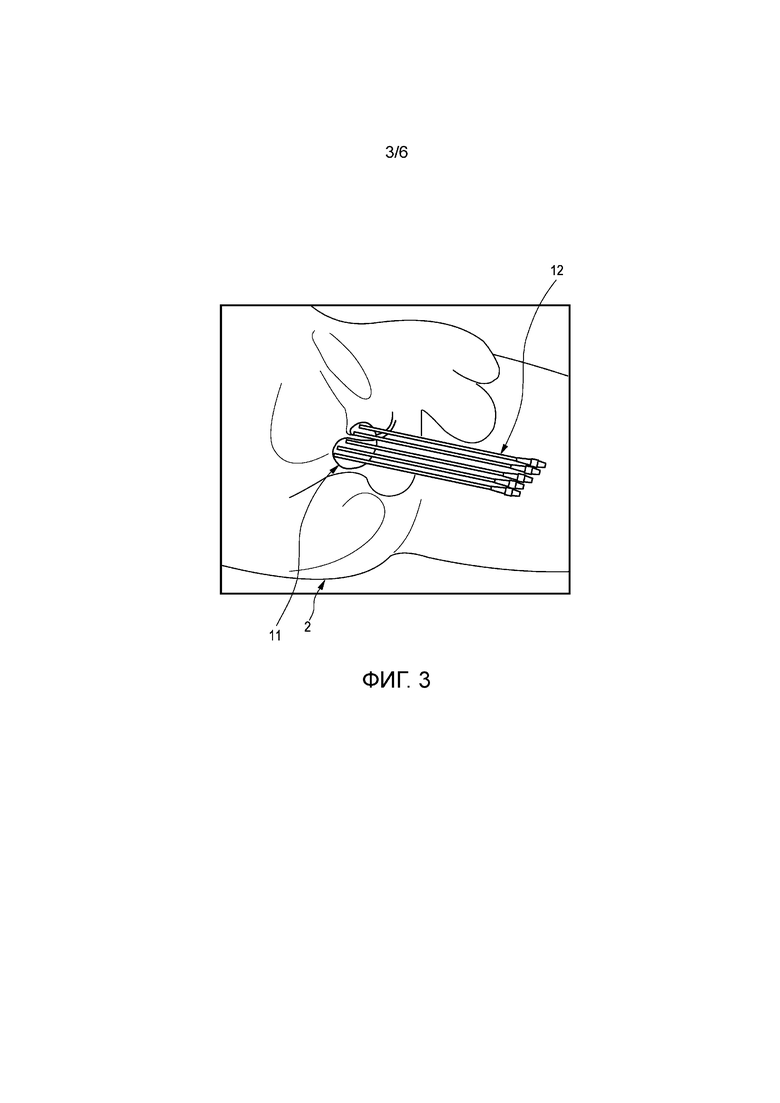
Фиг.3 схематично и примерно изображает возможное расположение вводимых элементов после введения в организм,
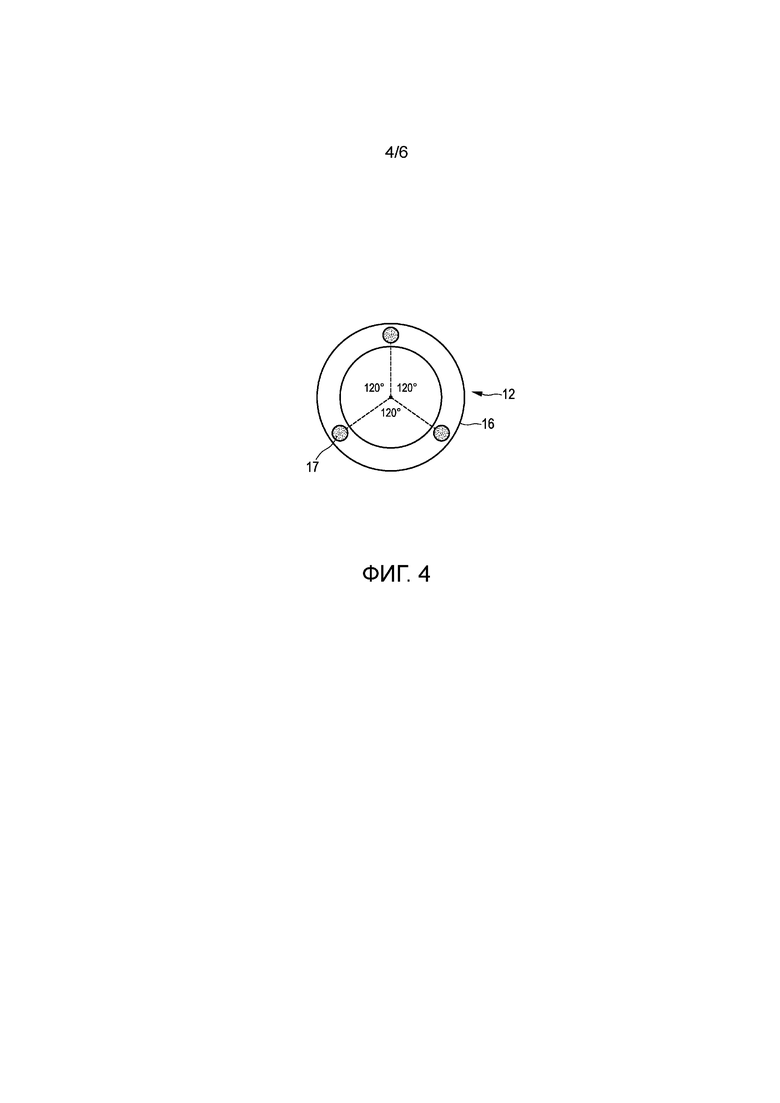
Фиг.4 схематично и примерно изображает вид сечения вводимого элемента,
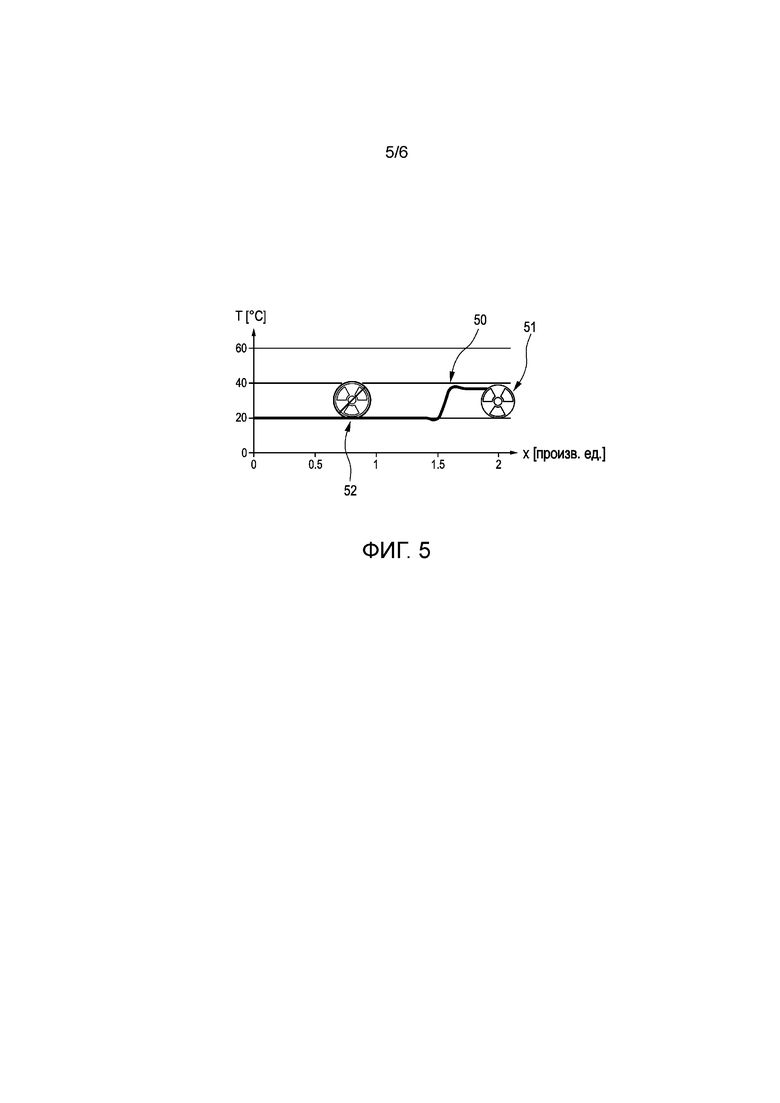
Фиг.5 схематично и примерно иллюстрирует распределение температуры, измеренное вдоль вводимого элемента, и
Фиг.6 изображает блок-схему, примерно иллюстрирующую вариант осуществления способа выполнения терапевтической процедуры.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг.1 схематично и примерно показана система выполнения терапевтической процедуры. В этом варианте осуществления система 1 представляет собой систему брахитерапии для применения брахитерапии к телу 2 человека, лежащего на средстве 3 поддержки, например на столе. Система 1 брахитерапии содержит блок 5 размещения для размещения источников излучения вблизи целевой области внутри тела 2 для направления излучения, испускаемого источниками излучения, к целевой области. Блок 5 размещения показан примерно и схематично более подробно на Фиг.2.
Блок 5 размещения содержит несколько удлиненных вводимых элементов 12, которые в этом варианте осуществления являются катетерами, с наконечниками 20 для введения в тело 2. Блок 5 размещения дополнительно содержит несколько навигационных элементов 13 являющихся проводами возбуждения, к которым прикреплены источники 10 излучения, причем соответствующий провод 13 возбуждения может быть перемещен в пределах соответствующего катетера 12 для размещения соответствующего источника 10 излучения в желаемом положении облучения. Катетеры 12 с проводами 13 возбуждения прикреплены к моторному блоку 14, содержащему несколько моторов для перемещения провода 13 возбуждения в направлении вперед и в обратном направлении для размещения источников 10 излучения в желаемые положения облучения. Источники 10 излучения предпочтительно представляют собой радиоактивные источники излучения, испускающие радиоактивное излучение, такие как Ir-192.
Блок размещения может содержать дополнительные элементы, способствующие размещению источников излучения в желаемых положениях облучения внутри тела. Например, блок размещения может содержать шаблон, который может быть использован для введения катетеров в более однородную конфигурацию в теле.
В этом варианте осуществления система 1 выполнена с возможностью терапевтической обработки целевой области, которая предпочтительно является областью опухоли в предстательной железе. Для размещения источников излучения вблизи целевой области, они могут быть размещены смежным образом к целевой области или в пределах целевой области. На Фиг.3 схематично и примерно показано возможное расположение катетеров 12 блока 5 размещения в пределах предстательной железы 11.
Система 1 дополнительно содержит блок 4, 8 воспроизведения изображений, являющийся, в этом варианте осуществления, блоком УЗИ. Блок УЗИ содержит ультразвуковой зонд 4 и блок 8 управления ультразвуком. Ультразвуковой зонд 4 может быть помещен на внешнюю поверхность тела 2, как схематично и примерно показано на Фиг.1, или ультразвуковой зонд может быть размещен внутри тела 2, для формирования изображения тела 2, в частности, целевой области 11. Например, ультразвуковой зонд может быть трансректальным ультразвуковым зондом. Сформированное изображение может показываться пользователю на дисплее 41 для руководства пользователя при введении катетеров 12 в тело 2. В другом варианте осуществления блок воспроизведения изображений может быть другим видом устройства воспроизведения изображений, таким как магнитно-резонансное устройство воспроизведения изображений. Поскольку блок 4, 8 воспроизведения изображений обеспечивает изображение тела, то блок 4, 8 воспроизведения изображений может рассматриваться как блок обеспечения изображения тела.
Каждый катетер 12 содержит оптическое волокно для распознавания формы. В частности, как схематично и примерно показано на Фиг.4, каждый катетер 12 может содержать три оптических волокна 17 для распознавания формы в пределах внешней стенки 16, причем эти три оптических волокна 17 для распознавания формы могут быть равноудаленно распределены по углу, то есть они могут иметь угловое расстояние друг относительно друга 120 градусов. Система 1 дополнительно содержит блок 9 управления оптическим распознаванием формы для формирования оптических сигналов распознавания формы посредством использования оптических волокон 17 для распознавания формы, причем сформированные оптические сигналы распознавания формы передаются в блок 13 определения температуры для определения температуры вдоль длины соответствующего катетера 12 на основании сформированных оптических сигналов распознавания формы.
Система дополнительно содержит блок 14 определения внутренней части для определения того, какая часть соответствующего катетера 12 находится внутри тела 2 на основании определяемой температуры. Блок 14 определения внутренней части может быть выполнен с возможностью определения того, какая часть соответствующего катетера 12 находится внутри тела 2, например, устанавливая пороговое значение измеренной температуры или вычисляя пространственный температурный градиент и/или временной температурный градиент вдоль соответствующего катетера 12 и устанавливая пороговое значение соответствующего температурного градиента. Пороговые значения могут быть статическими пороговыми значениями, то есть постоянными пороговыми значениями, или они могут быть динамическими пороговыми значениями, то есть они могут изменяться с течением времени. Могут быть обеспечены правила, которые задают внутреннее/внешнее положение вдоль соответствующего катетера на основании температуры, определенной вдоль соответствующего катетера. Правила могут задавать пороговые значения при установке порогового значения температуры и/или пространственных температурных градиентов и/или временных температурных градиентов, и как результаты этих операций установки пороговых значений могут быть объединены для определения внутреннего/внешнего положения вдоль соответствующего катетера 12. Может быть задано то, что положение, в котором пространственный температурный градиент больше, чем заданная пороговая величина, указывает внутреннее/внешнее положение. Кроме того, может быть задано, что положение, в котором временный температурный градиент больше, чем заданная пороговая величина, и поэтому указывает на внезапное падение или повышение температуры, указывает внутреннее/внешнее положение, в частности, когда соответствующий катетер 12 введен в или извлечен из тела 2. Правила, в частности, пороговые значения, могут быть определены калибровочными измерениями, причем внутреннее/внешнее положение вдоль соответствующего катетера известно, и правила, в частности, пороговые значения, определяются таким образом, что, некоторое известное распределение температуры вдоль соответствующего катетера, приводит к известному внутреннему/внешнему положению.
Блок 14 определения внутренней части может быть также выполнен с возможностью определения того, какая часть соответствующего катетера 12 находится внутри тела 2, и какая часть соответствующего катетера 12 находится вне тела 2, на основании температуры, определенной вдоль соответствующего катетера 12 посредством использования другой технологии. В частности, может быть использована модель, рассматривающая термодинамические свойства тела 2, среды и/или катетеров 12, в дополнение к температуре, определенной вдоль катетеров 12. Например, может использоваться модель, которая включает в себя секции для внутренней и внешней части тела при температурах 20 градусов Цельсия и 37 градусов Цельсия. Соответствующий катетер 12 сам по себе может быть смоделирован как цилиндр с радиусом и толщиной стенки, которая выполнена из металла с известной теплоемкостью. Это позволяет рассчитать теплопередачу, которая требуется для соответствующего оптического датчика для распознавания формы для обнаружения изменения температуры вследствие введения соответствующего катетера 12 в тело 2. Эта модель затем может быть инвертирована, с тем, чтобы обеспечить определение 14 внутренней части для определения положения перехода между внутренней и внешней частью тела, учитывая температуру, определенную вдоль соответствующего катетера 12. Такая модель также может быть использована для определения вышеупомянутых пороговых значений, которые могут быть использованы для установки порогового значения температуры, пространственного температурного градиента и/или временного температурного градиента.
Система 1 дополнительно содержит блок 35 определения положения для определения положений катетеров 12 внутри тела на основании сформированных оптических сигналов распознавания формы. Таким образом, оптические сигналы распознавания формы не только используются для определения температуры вдоль соответствующего катетера 12, но также и для определения положений катетеров 12 внутри тела 2. В частности, блок 35 определения положения выполнен с возможностью определения формы катетеров 12 и для определения положения каждого участка соответствующего катетера 12 на основании определенной соответствующей формы и известного положения, то есть местоположения и ориентации по меньшей мере одной точки соответствующего катетера 12. Это известное положение может быть определено вне тела любым известным средством. В варианте осуществления, точка соответствующего катетера 12 с известным положением представляет собой точку разреза, то есть, точку, где соответствующий катетер 12 входит в тело, причем положение этой точки может отслеживаться, например, электромагнитным отслеживанием, видеоотслеживанием или другой технологией отслеживания.
Определенные положения катетеров 12 внутри тела 2 могут быть совмещены с изображением тела 2, обеспеченным блоком 4, 8 воспроизведения изображения, чтобы позволить блоку 34 формирования изображений вводимого элемента формировать изображение вводимого элемента, показывающее представление катетеров 12 в пределах изображения тела на основании определенных положений катетеров 12 и изображения тела, обеспеченного блоком 4, 8 воспроизведения изображений. Сформированное изображение вводимого элемента может быть показано на дисплее 41 для обеспечения руководства пользователя при введении катетеров 12 в тело 2.
Вместо, или в дополнение к формированию текущего изображения тела 2, блок воспроизведения изображений может быть выполнен с возможностью обеспечения пре-интервенционного изображения, причем также и в этом случае определенные положения катетеров 12 внутри тела 2 могут быть совмещены с изображением тела 2, обеспеченным блоком воспроизведения изображений, чтобы позволить блоку 34 формирования изображения вводимого элемента формировать изображение вводимого элемента, показывающее представления катетеров 12 в пределах изображения тела на основании определенных положений катетеров 12 и изображения тела, обеспеченного блоком воспроизведения изображений. Сформированное изображение вводимого элемента, которое в этом примере основано на пре-интервенционном изображении, может быть показано на дисплее 41 для обеспечения руководства пользователя при введении катетеров 12 в тело 2.
Блок 34 формирования изображения вводимого элемента может быть выполнен с возможностью формирования представления, отображающего все катетеры 12. Однако, блок 34 формирования изображения вводимого элемента также может быть выполнен с возможность. формирования представления, отображающего только внутренние части или только внешние части катетеров 12 на основании определения того, какая часть соответствующего катетера 12 находится внутри тела и какая часть соответствующего катетера 12 находится вне тела.
Для совмещения изображения тела с определенными положениями катетеров 12 блок обеспечения изображения тела, в частности блок 8 управления УЗИ, может быть выполнен с возможностью обеспечения положения соответствующего места введения, в котором соответствующий катетер 12 вводится в тело 2, относительно обеспеченного изображения тела, причем совмещение может быть основано на том факте, что эти обеспеченные положения места введения соответствуют ближайшим концам частей катетеров 12, которые находятся в теле 2. Определение этих частей катетеров 12 внутри тела 2 будет объяснено дополнительно ниже. Положение места введения относительно обеспеченного изображения тела может быть обеспечено блоком обеспечения изображения тела посредством использования алгоритмов обработки изображения, в частности, алгоритмов сегментации для обнаружения места введения в пределах изображения тела. В других вариантах осуществления могут быть также использованы другие известные технологии для обнаружения определяемого положения вводимого элемента, подобно катетеру при помощи изображения тела.
Моторный блок 14 и провода 13 возбуждения могут рассматриваться как блок перемещения для перемещения источников 10 излучения в положения облучения для терапевтической обработки тела 2, в частности, для терапевтической обработки целевой области 11, в положениях облучения в пределах катетеров 12. Этот блок 13, 14 перемещения управляется блоком 15 управления брахитерапией в зависимости от определения того, какая часть соответствующего катетера 12 находится внутри тела 2, и какая часть соответствующего катетера 12 находится вне тела 2, таким образом, что каждое положение облучения заведомо находится в пределах части соответствующего катетера 12 внутри тела 2, то есть таким образом, чтобы движение источников 10 излучения в пределах катетеров 12 не прекращалось вне тела 2. Блок 15 управления брахитерапией, который вместе с блоком 13, 14 перемещения может рассматриваться как блок выполнения терапевтической процедуры, ввиду этого выполнен с возможностью выполнения терапевтической процедуры, то есть, брахитерапии в этом варианте осуществления, в зависимости от определения того, какая часть соответствующего катетера 12 находится внутри тела 2, в частности, таким образом, что терапевтическая процедура выполняется только в определенных внутренних частях катетеров 12.
На Фиг.5 схематично и примерно показана измеренная температура T в градусах Цельсия вдоль катетера 12, причем различные местоположения вдоль катетера 12 в произвольных единицах обозначены как x в произвольных единицах. В области 50 можно видеть повышение температуры, что может обнаруживаться блоком 14 определения внутренней части для определения того, какая часть катетера 12 находится внутри тела 2 и какая часть катетера 12 находится вне тела 2. Блок 15 управления брахитерапией выполнен таким образом, чтобы положения облучения находились только внутри тела, как обозначено символом 51, а не вне тела, как обозначено символом 52.
Система 1 может дополнительно содержать блок 31 определения глубины для определения глубины соответствующего катетера 12 внутри тела 2 на основании определенной внутренней части соответствующего катетера 12. В частности, блок 35 определения положения выполнен с возможностью определения положения каждого участка соответствующего катетера 12, и блок 31 определения глубины выполнен с возможностью определения глубины соответствующего катетера 12 на основании определенных положений участков соответствующего катетера 12 и на основании знания того, какие из этих участков находятся внутри тела 2, как обеспечено блоком 14 определения внутренней части. Определенные глубины катетеров 12 могут быть показаны пользователю на дисплее 41. Блок 31 определения глубины может быть дополнительно выполнен с возможностью определения отклонения определяемых глубин катетеров 12 относительно заданных глубин и указания отклонения. Например, заданные глубины могут быть предшествующими глубинами, которые были определены ранее, для определения того, изменились ли глубины во времени. Заданные глубины могут также быть, например, задаваемыми пользователем. Если имеется отклонение, в частности, если отклонение больше, чем заданная пороговая величина отклонения, то может быть сформирован сигнал оповещения для указания пользователю. Таким образом, сегментация на основании температуры, то есть определение того, какая часть соответствующего катетера 12 находится внутри тела 2 и какая часть соответствующего катетера 12 находится вне тела 2, на основании температуры, определенной вдоль соответствующего катетера 12, может быть использована для получения соответствующей глубины введения, причем, в частности, в случае брахитерапии, это может служить проверкой качества терапевтической обработки, подтверждая, что катетеры 12 все еще находятся в тех же самых положениях/глубинах. Если это не так, то может быть сформирован сигнал оповещения. Об остающейся длине соответствующего катетера вне тела, как определено посредством использования сегментации на основе температуры, может сообщаться пользователю через дисплей 41. Эта внешняя длина может также быть использована для проверки качества.
Система 1 может дополнительно содержать блок 32 обеспечения целевой глубины для обеспечения целевой глубины соответствующего катетера 12, и блок 33 формирования руководящей информации для формирования руководящей информации, указывающей на движение соответствующего катетера 12, что может позволить соответствующему катетеру 12 достигать целевой глубины, на основании обеспеченной целевой глубины и определенной глубины соответствующего катетера 12. Руководящая информация может указать, например, что соответствующий катетер 12 должен быть перемещен дополнительно в тело 2 на некоторое расстояние. Эта руководящая информация может быть дана в реальном времени, таким образом, чтобы пользователь мог руководствоваться руководящей информацией при введении катетеров 12 в тело 2.
Система 1 дополнительно содержит блок 40 ввода, такой как клавиатура, компьютерная мышь, сенсорная клавиатура и так далее, чтобы позволить пользователю, например, вводить команды в систему 1, подобные команде начала, для запуска процедуры брахитерапии, команде останова, для прекращения процедуры брахитерапии, и так далее. Блок 40 ввода также может быть использован для введения параметров, задающих процедуру брахитерапии, например, положения облучения и времена облучения. Положения облучения и времена облучения также могут быть автоматически определены блоком 15 управления брахитерапией на основании, например, изображения, показывающего целевую область и желаемую дозу облучения, которые могут быть введены пользователем для применения к целевой области. Известные алгоритмы планирования могут быть использованы для определения времен облучения и положений облучения, причем блок управления брахитерапией может быть выполнен с возможностью управления блоком 13, 14 перемещения в соответствии с обеспеченными желаемыми временами облучения, и положениями облучения, таким образом, чтобы положения облучения заведомо находились в пределах частей катетеров 12, которые были определены как находящиеся внутри тела 2.
Ниже, со ссылкой на блок-схему, показанную на Фиг.6, описывается примерный вариант осуществления способа выполнения терапевтической процедуры.
На этапе 101 температура вдоль соответствующего катетера 12, который был введен в тело 2, определяется блоком 13 определения температуры, то есть температура в различных местоположениях вдоль соответствующего катетера 12 определяется блоком 13 определения температуры. В частности, блок 13 определения температуры выполнен с возможностью определения этих распределений температуры на основании оптических сигналов распознавания формы, которые были сформированы посредством использования оптических волокон 17 катетеров 12 и посредством блока 9 управления оптическим распознаванием формы. На этапе 102 блок 14 определения внутренней части определяет то, какая часть соответствующего катетера 12 находится внутри 2, и какая часть соответствующего катетера 12 находится вне тела 2 на основании соответствующего определенного распределения температуры. Например, блок 14 определения внутренней части может вычислить температурные градиенты вдоль соответствующего катетера 12 и пороговое значение температурных градиентов для определения того, какая часть соответствующего катетера 12 находится в теле 2, и какая часть соответствующего катетера 12 находится вне тела 2. На этапе 103 терапевтическая процедура, то есть в этом варианте осуществления процедура брахитерапии, выполняется в зависимости от определения того, какая часть соответствующего катетера 12 находится внутри тела 2, и какая часть соответствующего катетера 12 находится вне тела 2. В частности, блок 15 управления брахитерапией управляет блоком 13, 14 перемещения таким образом, что положения облучения заведомо находятся только в пределах тех частей катетеров 12, которые были определены как находящиеся внутри тела 2, то есть таким образом, чтобы движение источников 10 излучения в пределах катетеров 12 не прекращалось вне тела 2.
Этапы 101-103 могут выполняться по замкнутому циклу таким образом, что температура вдоль катетеров 12 определяется непрерывно и используется для определения того, какая часть соответствующего катетера 12 находится внутри тела 2, и какая часть соответствующего катетера 12 находится вне тела 2. Это позволяет блоку 13, 14, 15 выполнения терапевтической процедуры выполнять терапию таким образом, что положения облучения заведомо находятся в пределах частей катетеров 12, которые были определены как находящиеся в теле 2, даже если глубина соответствующего катетера 12 внутри тела 2 изменяется в течение терапевтической процедуры.
Оптические волокна 17 для распознавания формы имеют Брэгговские решетки, которые действуют как высокоселективные отражатели, причем оптические волокна 17 для распознавания формы соединены с широкополосным источником и детектором блока 9 управления оптическим распознаванием формы. Пик отраженной волны для каждой Брэгговской решетки сдвигается вследствие изменений механических напряжений и температуры, таким образом, что эти сдвиги могут быть использованы для восстановления формы и температуры соответствующего катетера. В частности, форма всего соответствующего катетера относительно соответствующего известного местоположения закрепления может быть восстановлена для определения положения каждого участка или секции соответствующего катетера, и температура в различных участках или секциях вдоль соответствующего катетера может быть определена. Более подробное рассмотрение определения положения катетера и температуры вдоль длины катетера на основе оптического распознавания формы приводится, например, в вышеупомянутой книге "Fiber Optic Sensors" под редакцией F.T.S. Yu и S. Yin, Marcel Dekker, Inc. (2002), в частности в главе 4 этой книги, которая включена в настоящий документ путем ссылки.
Учитывая температуру вдоль соответствующего катетера, можно обнаруживать то, какая часть соответствующего катетера находится в теле. Технология оптоволоконного измерения способна измерять температуры в реальном времени. Если различие температуры между телом и его окружением достаточно велико, измеренная температура, таким образом, будет быстро повышаться при введении соответствующего катетера.
Сегментация на основе температуры соответствующего катетера используется для предотвращения нежелательных операций. В частности, брахитерапия, которая является предпочтительно HDR брахитерапией, выполняется таким образом, что положения облучения для источника излучения оказываются не вне тела, то есть положения облучения не находятся в «холодных» частях соответствующего отслеженного катетера, который может рассматриваться как катетер поставки HDR дозы. Катетеры 12 могут постоянно находиться в теле в течение нескольких дней, таким образом, что температуру вдоль соответствующего катетера можно считать установившейся.
Сегментация на основе температуры может быть использована для обеспечения руководства глубины в процессе введения посредством использования, например, вышеописанного блока определения глубины, блока обеспечения целевой глубины и блока формирования руководящей информации. Можно указать пользователю на то, на какой глубине соответствующий катетер в настоящее время находится, так же как и обеспечить дополнительное руководство на основании текущей глубины, полученной из температуры вдоль соответствующего катетера и намеченной целевой глубины. Обратная связь может быть обеспечена на том, что ввести ли соответствующий катетер далее в тело или нет.
В HDR брахитерапии источник интенсивного радиоактивного излучения может быть перемещен через целевое опухолевый узел с использованием ряда катетеров. Для гарантии безопасности пациента и для эффективной терапевтической обработки, доза излучения не должна подаваться вне тела пациента. Система, описанная выше в отношении Фиг.1-5, активно управляет, поэтому, подачей терапевтической обработки на основании измерения температуры вдоль поставляющих дозу катетеров, таким образом, что источник радиоактивного излучения не остановится, то есть прекратит поставлять дозу, вне тела пациента. Измерение температуры достигается внедрением оптоволоконного измерения в поставляющие дозу катетеры. Учитывая относительно большое различие температуры, блок определения внутренней части может идентифицировать то, какая часть соответствующего катетера находится внутри/вне тела пациента, используя относительно простые статические критерии, такие как пороговое значение температуры. Например, в качестве пороговой величины температуры может использоваться средняя окружающая температура, которая может составлять 20 градусов Цельсия, и температура тела, которая может составлять 37 градусов Цельсия, причем часть соответствующего катетера, имеющая температуру ниже этой пороговой величины температуры, может считаться как находящаяся вне тела пациента, и часть соответствующего катетера, имеющая температуру выше пороговой величины температуры, может считаться находящейся внутри тела пациента. Однако более расширенные ограничения могут учитывать температурные градиенты во времени и вдоль катетера. Кроме того, также могут быть использованы знания о свойствах материала соответствующего катетера для достижения дополнительной надежности.
Если положение облучения классифицируется как находящееся вне тела пациента, то блок 15 управления брахитерапией будет управлять проводами 13 возбуждения через моторный блок 14 для предотвращения облучения соответствующим источником 10 излучения в этом положении. Время облучения может быть в пределах нескольких секунд, например, в пределах диапазона от 1 с до 60 с. Однако, время облучения может также быть больше или меньше. Это автономное управление, которое может быть интегрировано в систему удаленного управления введением источника излучения, может предотвратить нежелательные события.
Хотя в вышеописанных вариантах осуществления вводимый элемент представляет собой катетер, в других вариантах осуществления, вводимый элемент может быть другим элементом, в частности, другим хирургическим инструментом. Кроме того, хотя в вышеупомянутых описанных вариантах осуществления система выполнения терапевтической процедуры представляет собой систему брахитерапии, в частности, систему HDR брахитерапии, в других вариантах осуществления система также может быть другой системой для выполнения терапевтической процедуры. Например, это может быть система, содержащая удлиненный хирургический инструмент, такой как абляционный катетер, содержащий несколько элементов абляции, которые могут быть электродами абляции, для применения энергии абляции к ткани, причем блок выполнения терапевтической процедуры может управлять хирургическим инструментом таким образом, что терапевтическая процедура, такая как подача энергии абляции, выполняется только внутри тела, а не снаружи тела. Система, в частности, может быть выполнена с возможностью использования в области минимально инвазивной хирургии (MIS) и в навигационных хирургических вмешательств и терапии (IGIT).
Хотя в вышеописанных вариантах осуществления температуры вдоль длин катетеров и положения катетеров были определены путем оптического распознавания формы, в других вариантах осуществления, температуры и положения могут быть определены посредством использования других технологий. Например, температуры могут быть определены термисторами, распределенными вдоль соответствующего катетера, или посредством использования оптоволоконных датчиков, которые не выполнены с возможностью определения положения соответствующего катетера. Положение соответствующего катетера может быть определено, например, электромагнитным отслеживанием, рентгеновским отслеживанием, и так далее.
Хотя в вышеописанном варианте осуществления со ссылкой на Фиг.1-3, в частности на Фиг.2, был описан блок 5 размещения, который содержит, несколько проводов 13 возбуждения с присоединенными источниками 2 излучения, в других вариантах осуществления может быть использован другой вид блока размещения. Например, может быть использован одножильный провод возбуждения с одиночным источником излучения, причем этот одножильный провод возбуждения может быть последовательно введен в различные катетеры 12. В частности, источник излучения может управляться с помощью индексатора, который соединен с различными катетерами. Более подробная информация относительно этого вида размещения источника излучения внутри пациента приведена в "Practical Guide to Quality Control of Brachytherapy Equipment" под редакцией J.Venselaar и J.Perez-Calatayud, Европейское общество терапевтической радиологии и онкологии (2004), которое настоящим включено в настоящий документ путем ссылки.
Другие изменения в раскрытых вариантах осуществления могут быть поняты и осуществлены специалистами в данной области техники при практической реализации заявленного изобретения на основании анализа чертежей, раскрытия и приложенной формулы изобретения.
В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, и упоминание единственного числа не исключает множества.
Один блок или устройство может выполнять функции нескольких элементов, приведенных в формуле. Само по себе то, что определенные средства приведены в различных зависимых пунктах формулы изобретения, не означает, что сочетание этих средств не может быть использовано для получения преимущества.
Определения, такие как определение температуры и положений на основании оптических сигналов распознавания формы, определение внутренних частей катетеров, определение глубины соответствующего катетера, и так далее и/или управление системой для выполнения терапевтической процедуры, которые были описаны как выполняемые определенным числом блоков или устройств, могут быть выполнены любым другим числом блоков или устройств. Например, эти определения и/или управление могут быть выполнены одиночными блоком обработки данных. Эти определения и/или управление системой выполнения терапевтической процедуры в соответствии со способом выполнения терапевтической процедуры могут быть осуществлены в качестве средств программного кода компьютерной программы и/или в качестве специализированных аппаратных средств.
Компьютерная программа может быть сохранена/распределена на подходящем носителе, таком как оптический носитель данных, или твердотельном носителе, поставляемых вместе или как часть других аппаратных средств, но также может быть распределена в других формах, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем притязаний.
Изобретение относится к системе для выполнения терапевтической процедуры, такой как HDR брахитерапия. Удлиненный вводимый элемент вводится в тело, температура определяется вдоль вводимого элемента, и определяется то, какая часть вводимого элемента находится внутри тела на основании определяемой температуры. Терапевтическая процедура выполняется посредством использования вводимого элемента в зависимости от определения того, какая часть вводимого элемента находится внутри тела. Это может гарантировать, что терапевтическая процедура выполняется только внутри тела, тем самым снижая вероятность нежелательного воздействия, например, на эпидерму пациента, в частности посредством ионизирующего излучения, которое может быть использовано во время HDR брахитерапии.

Группа изобретений относится к системе, способу и компьютеру, запрограммированному компьютерной программой для выполнения терапевтической процедуры. Система для выполнения терапевтической процедуры содержит удлиненный вводимый элемент для введения в тело, причём удлинённый вводимый элемент является катетером, блок определения температуры для определения температуры вдоль катетера, блок определения внутренней части для определения того, какая часть катетера находится внутри тела, на основании определенной температуры, таким образом обеспечивающий сегментацию катетера на основании температуры, блок выполнения терапевтической процедуры для выполнения терапевтической процедуры посредством использования катетера таким образом, что терапевтическая процедура выполняется только в определённой внутренней части катетера, при этом блок выполнения терапевтической процедуры содержит блок перемещения, выполненный с возможностью перемещения источника излучения в положение облучения для терапевтической обработки тела в положении облучения в пределах катетера, и блок управления брахитерапией, выполненный с возможностью управления блоком перемещения, при этом сегментация катетера на основании температуры используется для предотвращения нахождения положения облучения за пределами тела. Компьютер запрограммирован компьютерной программой для выполнения терапевтической процедуры, причем компьютерная программа содержит программное кодовое средство, побуждающее систему осуществлять этапы, на которых определяют температуру, определяют, какая часть вводимого элемента находится внутри тела, выполняют терапевтическую процедуру. Использование группы изобретений позволяет снизить вероятность нежелательного воздействия терапевтической процедуры на окружающих людей. 2 н. и 10 з.п. ф-лы, 6 ил.
1. Система для выполнения терапевтической процедуры, причем система (1) содержит:
- удлиненный вводимый элемент (12) для введения в тело (2), причём удлинённый вводимый элемент является катетером,
- блок (13) определения температуры для определения температуры вдоль катетера (12),
- блок (14) определения внутренней части для определения того, какая часть катетера (12) находится внутри тела (2), на основании определенной температуры, таким образом обеспечивающий сегментацию катетера (12) на основании температуры, и
- блок (18, 19, 15) выполнения терапевтической процедуры для выполнения терапевтической процедуры посредством использования катетера (12) в зависимости от определения того, какая часть катетера (12) находится внутри тела, таким образом, что терапевтическая процедура выполняется только в определённой внутренней части катетера (12), отличающаяся тем, что
блок (18, 19, 15) выполнения терапевтической процедуры содержит a) блок (18, 19) перемещения, выполненный с возможностью перемещения источника (10) излучения в положение облучения для терапевтической обработки тела (2) в положении облучения в пределах катетера (12), и b) блок (15) управления брахитерапией, выполненный с возможностью управления блоком (18, 19) перемещения таким образом, чтобы положение облучения находилось в пределах части катетера (12), которая была определена как находящаяся внутри тела (2), при этом сегментация катетера (12) на основании температуры используется для предотвращения нахождения положения облучения за пределами тела.
2. Система по п.1, в которой вводимый элемент (12) содержит оптическое волокно (17) для формирования оптических сигналов, указывающих температуру вдоль вводимого элемента (12), и в которой блок (13) определения температуры выполнен с возможностью определения температуры вдоль вводимого элемента (12) на основании формируемых оптических сигналов.
3. Система по п.1, в которой блок (14) определения внутренней части выполнен с возможностью определения того, какая часть вводимого элемента (12; 212) находится внутри тела (2), посредством определения повышения или понижения температуры вдоль вводимого элемента (12).
4. Система по п.1, в которой блок (14) определения внутренней части выполнен с возможностью определения того, какая часть вводимого элемента (12) находится внутри тела (2), посредством моделирования термодинамических свойств тела (2) и/или окружающей среды, и/или вводимого элемента (12) и посредством использования определенной температуры вдоль вводимого элемента (12).
5. Система по п.1, причем система (1) дополнительно содержит блок (31) определения глубины для определения глубины вводимого элемента (12) внутри тела (2) на основании определенной внутренней части вводимого элемента (12).
6. Система по п.5, в которой блок (31) определения глубины дополнительно выполнен с возможностью определения отклонения определенной глубины вводимого элемента (12) от заданной глубины и указания этого отклонения.
7. Система по п.5, причем система (1) дополнительно содержит блок (32) обеспечения целевой глубины для обеспечения целевой глубины вводимого элемента (12) и блок (33) формирования руководящей информации для формирования руководящей информации, указывающей на перемещение вводимого элемента (12), которое позволило бы вводимому элементу (12) достичь целевой глубины, на основании обеспеченной целевой глубины и определенной глубины вводимого элемента (12).
8. Система по п.1, причем система (1) дополнительно содержит:
- блок (35) определения положения для определения положения вводимого элемента (12) внутри тела (2),
- блок (4, 8) обеспечения изображения тела для обеспечения изображения тела, причем обеспеченное изображение тела совмещается с определенным положением вводимого элемента (12),
- блок (34) формирования изображения вводимого элемента для формирования изображения вводимого элемента, показывающего представление вводимого элемента (12) в изображении объекта на основании определенного положения вводимого элемента (12) внутри тела (2) и изображения тела.
9. Система по п.8, в которой блок (34) формирования изображения вводимого элемента выполнен с возможностью формирования изображения вводимого элемента таким образом, чтобы было показано только представление внутренней части или внешней части вводимого элемента (12), на основании определения того, какая часть вводимого элемента (12) находится внутри тела (2).
10. Система по п.8, в которой вводимый элемент (12) содержит оптическое волокно (17) для распознавания формы для формирования оптических сигналов распознавания формы, указывающих на положение вводимого элемента (12) внутри тела (2), и при этом блок (35) определения положения выполнен с возможностью определения положения вводимого элемента (12) внутри тела (2) на основании сформированных оптических сигналов распознавания формы.
11. Система по п.8, в которой блок (4, 8) обеспечения изображения тела выполнен с возможностью обеспечения положения места введения, в котором вводимый элемент (12) вводится в тело (2), относительно обеспеченного изображения тела и совмещения изображения тела с положением вводимого элемента (12) на основании обеспеченного положения места введения и ближайшего конца определенной внутренней части вводимого элемента (12).
12. Компьютер, запрограммированный компьютерной программой для выполнения терапевтической процедуры, причем компьютерная программа содержит программное кодовое средство, побуждающее систему по п.1 осуществлять следующие этапы, когда компьютерная программа выполняется на компьютере, управляющем системой:
- определяют температуру вдоль вводимого элемента (12), который был введен в тело (2),
- определяют, какая часть вводимого элемента (12) находится внутри тела (2), на основании определенной температуры, таким образом обеспечивая сегментацию вводимого элемента (12) на основании температуры, отличающийся тем, что этапы дополнительно включают в себя этапы, на которых:
- выполняют терапевтическую процедуру посредством использования вводимого элемента (12) в зависимости от определения того, какая часть вводимого элемента (12) находится внутри тела (2), таким образом, что терапевтическая процедура выполняется только в определённой внутренней части вводимого элемента (12), причём вводимый элемент (12) является катетером, и при этом выполнение терапевтической процедуры включает в себя a) перемещение источника (10) излучения посредством блока (18, 19) перемещения в положение облучения для терапевтической обработки тела (2) в положении облучения в пределах катетера (12) и b) управление блоком (18, 19) перемещения посредством блока (15) управления брахитерапией таким образом, чтобы положение облучения находилось в пределах части катетера (12), которая была определена как находящаяся внутри тела (2), при этом сегментация катетера (12) на основании температуры используется для предотвращения нахождения положения облучения за пределами тела.
| WO 2013030749 A2, 07.03.2013 | |||
| US 2013204072 A1, 08.08.2013 | |||
| US 2014005465 A1, 02.01.2014. |

