Изобретение относится к области авиации, в частности к летательным аппаратам с машущими движениями крыльев, и может быть использовано при конструировании летательных аппаратов, к устройствам, в том числе дистанционно управляемым, разведывательного значения.
Известно техническое решение «Привод машущих крыльев модели летательного аппарата, патент RU №157031, МПК В64С 33/02, А63Н 27/28, опубл. 20.11.2015, состоящий из корпуса, к которому шарнирно прикреплены четыре машущих крыла (два попарно соединенных и движущихся в противофазе) и хвостовой стабилизатор. На корпусе неподвижно установлен привод, включающий в себя мотор-редуктор, кинематически связанный через цилиндрическую зубчатую передачу с кривошипно-шатунными механизмами (с противоположно ориентированными кривошипами), шатуны которых шарнирно соединены с двумя попарно-соединенными и движущимися в противофазе крыльями. Мотор-редуктор, включающий в себя электродвигатель и редуктор, электрически связан с системой управления и источником энергии, установленными на корпусе.
Недостатком этого устройства является использование в качестве базового механизма примитивного плоского механизма, и в качестве рабочего органа движения крыла использовано звено, совершающее возвратно-вращательное движение, в свою очередь, ограничивая возможность управления полетом, тем самым ухудшая динамику полета и снижая эффективность в целом.
Наиболее близким по технической сущности к заявляемому техническому решению и взятому в качестве прототипа является «Летательный аппарат с использованием машущих крыльев (стрекоза)», патент RU на изобретение №2375253, МПК В64С 33/02, А63Н 27/28, опубл. 10.12.2009, Бюл. №34, содержащий корпус, в котором размещены двигатель с редуктором и двумя кривошипно-шатунными механизмами. Указанные механизмы приводят в колебательное движение два силовых вала, которые посредством цепных передач обеспечивают машущие движения четырех симметричных крыльев. Крылья снабжены механизмом вращения крыла вокруг продольной оси. Механизм вращения расположен в корне крыла на центральном лонжероне, который установлен в вилке и вращается в ней в процессе колебательных движений крыла при помощи двух храповых механизмов. Каждый храповой механизм состоит из двух дисков, один из которых закреплен на лонжероне крыла, а другой диск, с собачкой, выполнен в виде шкива. Механизм имеет рычаг управления.
Недостаток данного летательного аппарата заключается в сложной конструкции привода механизмов машущих крыльев, поскольку привод состоит из большего количества различных механизмов, а именно:
- несколько цепных передач, которые имеют недостатки: большой вес, очень шумная работа, ограниченная частота вращения, что снижает функциональные возможности устройства;
- храповые механизмы, имеющие недостатки шума, вибрации, большего износа, плохой точности, что снижает надежность устройства.
Кроме того, устройство обеспечивает простое движение взмахов вверх и вниз крыльев, скачкообразно, приводящие при взмахе вверх к увеличению площади сопротивления движения, что приводит к ухудшению аэродинамики и управления, снижая эффективность в целом.
Решаемой технической задачей изобретения является повышение эффективности механизма машущего крыла за счет повышения надежности механизма путем упрощения конструкции, с одновременным расширением функциональных возможностей машущего крыла.
Технический результат достигается тем, что в механизме машущего крыла, содержащем корпус, шарнирно соединенный с крыльями, силовую установку и привод машущих крыльев, согласно которому силовая установка выполнена в виде мотор-редукторов, шестерен и зубчатых колес, при этом привод машущих крыльев содержит ведущие и ведомые кривошипы, которые расположены симметрично относительно корпуса, причем крылья соединены с корпусом шарнирно через ведомые кривошипы, а ведущие кривошипы с одной стороны, соединены шарнирно с крыльями, с другой стороны, жестко соединены с валами ведущих кривошипов, на которые установлены зубчатые колеса, входящие в зацепление с шестернями, посаженными на валы мотор-редукторов.
Новым является:
Новизной является механизм машущего крыла, состоящий из крыла, соединенного шарнирно со звеньями, ведущим и ведомым кривошипами, совершающего пространственное движение, имитирующее движение крыла птицы во время полета, образуя траекторию движения по эллипсу.
Структурные параметры этих звеньев представлены на фигуре 1:
где α1=α3 являются углами между осями шарниров ведущего и ведомого кривошипов, которые скрещиваются в пространстве;
- α2=α4 являются углами между шарниров крыла и корпуса.
Угол α2=α4 и изменяются в пределах от 75-105°, оптимальным с точки зрения изготовления является α2=α4=90°. Значение углов α1=α3 определяется формулой  .
.
где -  кратчайшее расстояние между скрещивающимися осями шарниров крыла (корпуса), принимается конструктивно в зависимости от габаритов крыла, при этом
кратчайшее расстояние между скрещивающимися осями шарниров крыла (корпуса), принимается конструктивно в зависимости от габаритов крыла, при этом  ;
;
-  кратчайшее расстояние между скрещивающимися осями шарниров ведущего и ведомого кривошипов и рассчитывается по формуле
кратчайшее расстояние между скрещивающимися осями шарниров ведущего и ведомого кривошипов и рассчитывается по формуле  , при этом
, при этом  . Для обеспечения работоспособности механизма машущего крыла необходимо совместить концы кратчайших расстояний ведущего кривошипа, крыла, ведомого кривошипа, корпуса последовательно.
. Для обеспечения работоспособности механизма машущего крыла необходимо совместить концы кратчайших расстояний ведущего кривошипа, крыла, ведомого кривошипа, корпуса последовательно.
Траектория движения крыла описывает в пространстве эллипс.
Для пояснения технической сущности заявленного технического решения рассмотрим чертеж:
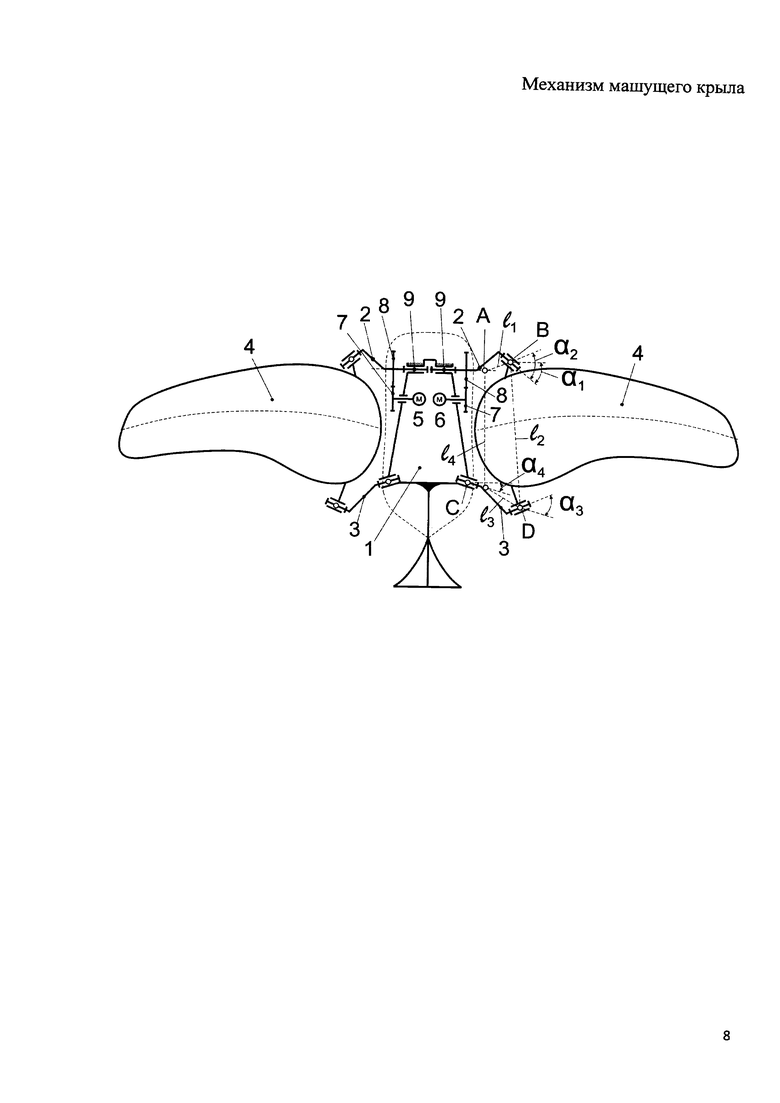
На фиг. 1 - представлена структурная схема механизма машущего крыла, где
1 - корпус; 2 - ведущий кривошип; 3 - ведомый кривошип; 4 - крылья; 5, 6 - мотор-редукторы; 7 - шестерня; 8 - зубчатое колесо; 9 - вал ведущего кривошипа; α1, α2, α3, α4 - углы скрещивания между осями шарниров А, В, С, D;  ,
,  ,
,  ,
,  - кратчайшие расстояния между скрещивающимися осями шарниров А, В, С, D.
- кратчайшие расстояния между скрещивающимися осями шарниров А, В, С, D.
Механизм машущего крыла состоит из корпуса 1, к которому с помощью ведущего кривошипа 2 и ведомого кривошипа 3 шарнирно соединено крыло 4. На корпус 1 установлен привод, включающий в себя мотор-редуктор 5, шестерня 7 и зубчатое колесо 8. Шестерня 7 жестко посажена на вал мотор-редуктора 5 и входит в контакт с зубчатым колесом 8, установленным на вал ведущего кривошипа 9. При этом вал кривошипа 9 жестко соединен с ведущим кривошипом 2, при этом аналогично, симметрично устроен привод правого крыла. Причем структурные параметры ведущего и ведомого кривошипов выполнены одинаково, т.е. оси их шарниров скрещиваются в пространстве под одинаковыми углами, и имеет одинаковые кратчайшие расстояние между этими осями шарниров: α1=α3,  .
.
Механизм машущего крыла работает следующим образом:
Вращающиеся движения от мотор-редукторов 5, 6 передаются шестерням 7, которые входят в зацепление с зубчатыми колесами 8 и через валы ведущих кривошипов 9 передают вращательные движения ведущим кривошипам 2. В свою очередь, ведущие кривошипы 2 через шарнир А приводят в движение крылья 4, которые связаны через шарниры В и D с ведомыми кривошипами 3 и корпусом 1. Таким образом, крылья 4 установлены между ведущими кривошипами 2 и ведомыми кривошипами 3, с возможностью совершения пространственного движения, имитирующего движение крыла птицы во время полета, образуя траекторию движения по эллипсу.
По своим технико-экономическим преимуществам, по сравнению с известными аналогами, заявляемый механизм машущего крыла позволяет повысить эффективность механизма машущего крыла за счет повышения надежности механизма путем упрощения конструкции, с одновременным расширением функциональных возможностей машущего крыла, благодаря конструктивному выполнению машущих крыльев, выполняющих пространственное движение, имитирующее движение крыла птицы во время полета, образуя траекторию движения по эллипсу.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШЕСТИЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2019 |
|
RU2713662C1 |
| БАРАБАННЫЙ СМЕСИТЕЛЬ | 2013 |
|
RU2527993C1 |
| БАРАБАННЫЙ МИКСЕР | 2013 |
|
RU2542270C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ ЖИДКОСТЕЙ | 2016 |
|
RU2633902C1 |
| МЕШАЛКА ДЛЯ ВЯЗКИХ ЖИДКОСТЕЙ | 2016 |
|
RU2633586C1 |
| УСТРОЙСТВО ДЛЯ ГАЛТОВКИ ДЕТАЛЕЙ | 2022 |
|
RU2813522C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 2016 |
|
RU2639062C1 |
| Орнитоптер | 2023 |
|
RU2810824C1 |
| СМЕСИТЕЛЬ ДИФФЕРЕНЦИАЛЬНЫЙ | 2020 |
|
RU2758515C1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2605955C1 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов с машущими движениями крыльев. Механизм машущего крыла содержит корпус (1), шарнирно соединенный с крыльями (4), силовую установку и привод машущих крыльев. Силовая установка выполнена в виде мотор-редукторов (5, 6), шестерен (7) и зубчатых колес (8). При этом привод машущих крыльев содержит ведущие (2) и ведомые (3) кривошипы, которые расположены симметрично относительно корпуса (1). Крылья (4) соединены с корпусом (1) шарнирно через ведомые кривошипы (3), а ведущие кривошипы (2) с одной стороны соединены шарнирно с крыльями (4), с другой стороны жестко соединены с валами (9) ведущих кривошипов (2), на которые установлены зубчатые колеса (8), входящие в зацепление с шестернями (7), посаженными на валы мотор-редукторов (5, 6). Обеспечивается повышение эффективности механизма машущего крыла. 1 ил.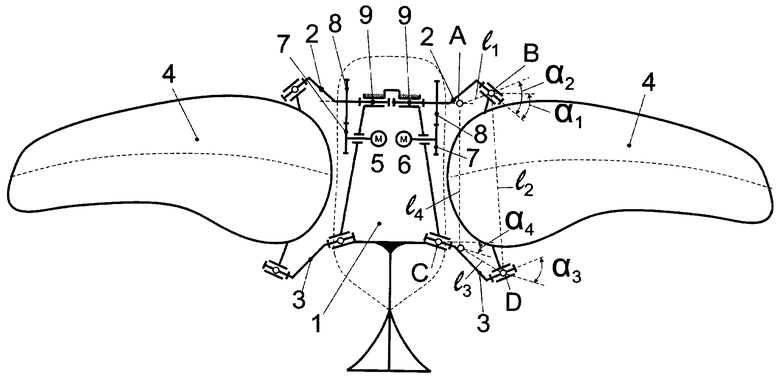
Механизм машущего крыла, содержащий корпус, шарнирно соединенный с крыльями, силовую установку и привод машущих крыльев, отличающийся тем, что силовая установка выполнена в виде мотор-редукторов, шестерен и зубчатых колес, при этом привод машущих крыльев содержит ведущие и ведомые кривошипы, которые расположены симметрично относительно корпуса, причем крылья соединены с корпусом шарнирно через ведомые кривошипы, а ведущие кривошипы с одной стороны соединены шарнирно с крыльями, с другой стороны жестко соединены с валами ведущих кривошипов, на которые установлены зубчатые колеса, входящие в зацепление с шестернями, посаженными на валы мотор-редукторов.
| МАШУЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2089461C1 |
| 0 |
|
SU157031A1 | |
| DE 3210206 A, 29.09.1983 | |||
| CN 103552689 A, 05.02.2014 | |||
| Способ изоляции призабойной зоны пласта | 1987 |
|
SU1518485A1 |

