Изобретение относится к области машиностроения, может быть использовано при создании систем управления, в робототехнике, в машинах - автоматах многих отраслей промышленности и других устройствах, где могут применяться механизмы со скрещивающимися осями и с переменной угловой скоростью вращения звеньев.
Известен шарнирно-рычажный механизм по Авт. свид. СССР №947535, М. кл. F16H 21/12. Опубл. 30.07.1982, Бюлл. №28.
Механизм содержит шесть звеньев: стойку, ведущий и ведомый кривошипы, шарнирно связанные со стойкой, два шатуна, шарнирно связанные с ведущим и ведомым кривошипами, промежуточное звено, шарнирно связанное с шатунами.
Длина промежуточного звена механизма равна сумме или разности длин ведомого и ведущего кривошипов, а угол скрещивания осей его шарниров равен сумме или разности углов скрещивания осей шарниров ведущего кривошипа с шатуном ведущего кривошипа и ведомого кривошипа со стойкой, длина шатуна ведомого кривошипа равна сумме или разности длины шатуна ведущего кривошипа и длины стойки.
Угол скрещивания осей шарниров ведомого кривошипа и шатуна ведомого кривошипа равен сумме или разности 90° угла скрещивания осей шарниров промежуточного звена и шатуна ведущего кривошипа, отношение длины ведущего кривошипа к синусу угла скрещивания осей шарниров ведущего кривошипа и шатуна ведущего кривошипа равно отношению длины шатуна ведущего кривошипа к синусу угла скрещивания осей шарниров шатуна ведущего кривошипа и промежуточного звена, равно отношению длины ведомого кривошипа к синусу угла скрещивания осей шарниров ведомого кривошипа со стойкой, равно длине стойки, т.е.  Угол скрещивания осей шарниров со стойкой равен 90°.
Угол скрещивания осей шарниров со стойкой равен 90°.
Недостаток этого механизма заключается в следующем. Во-первых, механизм является мультипликатором, т.е. устройством для увеличения частоты вращения ведомого кривошипа механизма. Так, в этом механизме при одном обороте ведущего кривошипа ведомый кривошип делает три оборота.
Во-вторых, подвижные звенья - два шатуна и промежуточное звено, соединенными с ведущим и ведомым кривошипами имеют недостаточную жесткость конструкции для силовой передачи движения, кроме этого, связь между параметрами звеньев механизма достаточно сложная, что затрудняет проектирование механизма и его изготовление.
Близким решением к предлагаемому механизму является так же шестизвенный шарнирно-рычажный механизм (патент РФ №2605955 Шарнирно-рычажный механизм, МПК F16H 21/48, заявлен 30.06.2015, опубл. 10.01.2017 Бюл. №1).
Шарнирно-рычажный механизм содержит стойку, ведущий и ведомый кривошипы, два шатуна и промежуточное звено, которые соединены вращательными шарнирами.
Звенья механизма имеют угловые и линейные параметры, удовлетворяющие равенству  и неравенству α3<α5<α4<α2, а также α6=α2+α4,
и неравенству α3<α5<α4<α2, а также α6=α2+α4, 
Здесь обозначены длины:  стойки,
стойки,  ведущего кривошипа,
ведущего кривошипа,  ведомого кривошипа,
ведомого кривошипа,  шатуна ведущего кривошипа,
шатуна ведущего кривошипа,  шатуна ведомого кривошипа,
шатуна ведомого кривошипа,  промежуточного звена; углы скрещивания: α2-ведущего кривошипа, α3-ведомого кривошипа, α4-шатуна ведущего кривошипа, α5-шатуна ведомого кривошипа, α6-промежуточного звена.
промежуточного звена; углы скрещивания: α2-ведущего кривошипа, α3-ведомого кривошипа, α4-шатуна ведущего кривошипа, α5-шатуна ведомого кривошипа, α6-промежуточного звена.
Механизм в отличие от первого механизма по Авт. свид. СССР №947535 обеспечивает редуцирование вращения с передаточным отношением, равным трем.
Недостаток и этого механизма аналогичен недостаткам первого механизма и заключается в том, что механизм является редуктором, т.е. устройством для уменьшения частоты вращения ведомого кривошипа механизма. Так, в этом механизме при трех оборотах ведущего кривошипа ведомый кривошип делает один оборот.
Во-вторых, связь между параметрами звеньев механизма достаточно сложная, что затрудняет проектирование механизма и его изготовление.
В-третьих, кинематическая связь пяти подвижных звеньев не обладает достаточной жесткостью для силовой передачи движения, механизм имеет ограниченное применение - только для редуцирования движения ведомого звена.
Уровень техники
Цель изобретения - упрощение конструкции и связи между параметрами звеньев механизма, увеличение жесткости подвижных звеньев для силовой передачи движения, увеличение функций механизма.
Описание чертежей
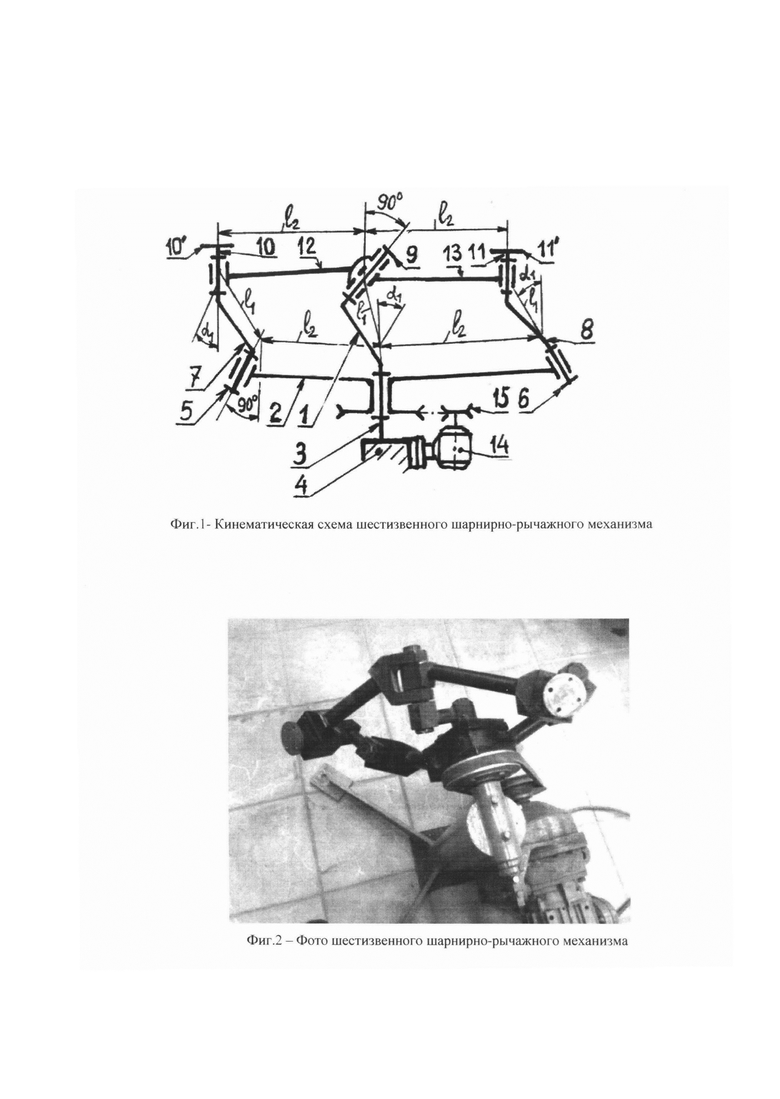
На фиг. 1 схематически изображена схема механизма, на фиг. 2 - фото механизма.
Указанная цель достигается тем, что в шестизвенном шарнирно-рычажном механизме, содержащем стойку, ведущее и ведомое звенья, промежуточное звено и два подвижных звена (шатуны), шарнирно связанные между собой, отличающийся тем, что стойка выполнена в виде звена со скрещенными под углом α1 геометрическими осями пальцев на расстоянии  ведущее звено (кривошип) шарнирно соединено с одним из пальцев стойки и имеет на концах шарниры, геометрические оси отверстий которых расположены под прямым углом на расстоянии
ведущее звено (кривошип) шарнирно соединено с одним из пальцев стойки и имеет на концах шарниры, геометрические оси отверстий которых расположены под прямым углом на расстоянии  равное
равное  при этом два промежуточных звена имеют пальцы, геометрические оси которых расположены, так же как и пальцы стойки, т.е. скрещены под углом α1 на расстоянии
при этом два промежуточных звена имеют пальцы, геометрические оси которых расположены, так же как и пальцы стойки, т.е. скрещены под углом α1 на расстоянии  и шарнирно связаны с ведущим звеном (кривошипом) и с двумя подвижными звеньями (шатунами), геометрические оси шарниров которых расположены под прямым углом на расстоянии
и шарнирно связаны с ведущим звеном (кривошипом) и с двумя подвижными звеньями (шатунами), геометрические оси шарниров которых расположены под прямым углом на расстоянии  а два промежуточных звена являются ведомыми звеньями (кривошипами), на пальцах которых закреплены шайбы для соединения с исполнительным рабочим элементом.
а два промежуточных звена являются ведомыми звеньями (кривошипами), на пальцах которых закреплены шайбы для соединения с исполнительным рабочим элементом.
Отличительными признаками предложенного механизма в сравнении с прототипом являются:
- в прототипе механизм является редуктором, т.е. при трех оборотах ведущего звена, ведомое звено делает один оборот; в предложенном механизме осуществляются две одинаковые передачи без редуцирования, т.е. при одном обороте ведущего звена два ведомых промежуточных звеньев делают также по одному обороту с планетарными движениями и с неравномерной угловой скоростью в пределах одного оборота;
- в прототипе промежуточное звено имеет угол скрещивания осей шарниров, равный сумме угла скрещивания осей шарниров ведущего кривошипа и угла скрещивания осей шарниров шатуна ведущего кривошипа, а длина его равна сумме длины ведущего кривошипа и длины шатуна ведущего кривошипа; в предложенном механизме два промежуточных звена имеют угол скрещивания осей шарниров (пальцев) и длину между ними, равные таковым параметрам стойки (неподвижного звена);
- в прототипе длина шатуна ведомого кривошипа равна произведению длины стойки на синус угла скрещивания осей шарниров ведомого кривошипа, в предложенном механизме длина шатуна ведущего и ведомого промежуточных звеньев (кривошипов) равна отношению длины стойки на синус угла скрещивания геометрических осей его пальцев, т.е. 
- в прототипе взаимосвязь между параметрами звеньев определяется выражением  в предложенном механизме связь между параметрами равна
в предложенном механизме связь между параметрами равна 
- в прототипе углы скрещивания осей шарниров ведущего кривошипа, шатуна ведущего кривошипа, шатуна ведомого кривошипа и ведомого кривошипа связаны неравенством α3<α5<α4<α2, а также α6=α2+α4,  в предложенном механизме этого условия нет;
в предложенном механизме этого условия нет;
- в прототипе кинематическая подвижная связь состоит из пяти подвижных звеньев, что для силовой передачи движения жесткости недостаточно, в предложенном механизме по три подвижных звена на каждой из двух симметричных кинематических схем, что существенно повышает жесткость механизма в целом.
Раскрытие изобретения
Шарнирно-рычажный механизм (фиг. 1) содержит неподвижное звено - стойку 1, шарнирно связанное с подвижным звеном 2 через палец 3, который жестко соединен с рамой 4.
Подвижное звено - кривошип 2 на концах имеет шарниры, соединенные с пальцами 5 и 6, геометрические оси которых расположены под прямым углом к геометрической оси пальца 3 неподвижного звена - стойки 1, на длине 
Пальцы 5 и 6 принадлежат двум ведомым промежуточным звеньям 7 и 8, которые имеют угловые и линейные параметры расположения пальцев 5 и 10 звена 7, и соответственно, пальцев 6 и 11 звена 8, такие же, как расположение геометрических осей пальцев 3 и 9 неподвижного звена-стойки 1, т.е. на кратчайшем расстоянии  и под углом скрещивания α1, который может принимать значение в пределах 10-40°.
и под углом скрещивания α1, который может принимать значение в пределах 10-40°.
Пальцы 10 и 11 шарнирно связаны с подвижными звеньями - шатунами 12 и 13, другие концы подвижных звеньев также шарнирно связаны с пальцем 9 неподвижного звена - стойки 1. На пальцах 10 и 11 закреплены диски-шайбы 10' и 11', к которым соединяются (крепятся) исполнительные органы различных устройств.
Звенья 12 и 13 имеют расположение геометрических осей шарниров такое же, как у ведущего звена 2, т.е. расположены под прямым углом на расстоянии  Звено 2 будет цельным, а звенья 12 и 13 - составными.
Звено 2 будет цельным, а звенья 12 и 13 - составными.
Ведущее звено 2 приводится во вращение от источника привода 14 (электродвигатель с редуктором или мотор-редуктор) через зубчатую или клиноременную передачу 15, одно зубчатое колесо или шкив закреплено жестко на звене 2, а другое - шестерня или шкив - на валу источника привода 14.
Все кинематические соединения звеньев выполнены на вращательных шарнирах, оформляемых на моделях подшипниками скольжения (как на фиг. 1), или на подшипниках качения в производственных машинах - автоматах и устройствах (как на фиг. 2).
Длины звеньев в механизме определяются кратчайшими расстояниями между геометрическими осями их шарниров. Углы скрещивания отсчитываются против часовой стрелки от оси шарнира, обращенного к наблюдателю. (Скрещивающиеся геометрические оси шарниров - это оси, которые не параллельны и нигде не пересекаются.)
Связь между параметрами 
 и α1 звеньев механизма определяется выражением
и α1 звеньев механизма определяется выражением 
Механизм работает следующим образом.
От источника привода 14 мотор-редуктора (фиг. 1 и 2) через клиноременную передачу 15 вращение передается ведущему звену - кривошипу 2 и ведомым промежуточным звеньям 7 и 8, затем подвижным звеньям-шатунам 12 и 13.
За счет скрещенными под разными углами геометрическими осями шарниров звеньев и кратчайшими расстояниями между ними при вращении ведущего звена 2 пальцы 10 и 11 с дисками - шайбами 10' и 11' совершают сложное пространственное движение - вращение относительно осей пальцев 10 и 11 и одновременное вращение относительно геометрической оси пальца 9 неподвижного звена-стойки 1, т.е. совершается планетарное движение с неравномерной угловой скоростью в пределах одного оборота.
Максимальное значение угловой скорости определится выражением,
где ω1 - угловая скорость ведущего звена (кривошипа) 2, рад/с;
α1 - угол скрещивания геометрических осей пальцев неподвижного звена и пальцев двух промежуточных звеньев, град.
Минимальное значение угловой скорости составит,
Следует отметить, что в этом механизме от одного источника привода и одного ведущего звена 2 действуют сразу два ведомых промежуточных звеньев 10 и 11 с однотипными характерами движений, т.е. можно использовать механизм для двух исполнительных устройств.
Степень неравномерности вращения пальцев 10 и 11 с закрепленными на них диск-шайбами 10' и 11' определяется формулой δ=tgα1.
Осуществление изобретения. Пример конструктивного воплощения механизма.
Конструирование механизма начинается с назначения одного из параметров взаимосвязи из формулы  Например, примем расстояние или длину
Например, примем расстояние или длину  между геометрическими осями шарниров подвижных звеньев 12 и 13, то же самое расстояние между осями шарниров ведущего звена 2, равное 150 мм. Геометрические оси указанных шарниров расположены под прямым углом. Длина принимается из расчета габаритов механизма.
между геометрическими осями шарниров подвижных звеньев 12 и 13, то же самое расстояние между осями шарниров ведущего звена 2, равное 150 мм. Геометрические оси указанных шарниров расположены под прямым углом. Длина принимается из расчета габаритов механизма.
Далее принимается один из оставшихся параметров: α1 или  Поскольку угол α1 может принимать значения в пределах 10-40°, примем α1=15°, тогда из формулы взаимосвязи
Поскольку угол α1 может принимать значения в пределах 10-40°, примем α1=15°, тогда из формулы взаимосвязи  определяется кратчайшее расстояние
определяется кратчайшее расстояние  равное,
равное, 
Таким образом, параметры звеньев механизма будут иметь следующие значения: кратчайшие расстояния 
 угол скрещивания геометрических осей пальцев звеньев 1, 7 и 8 α1=15°, угол расположения геометрических осей шарниров звеньев 2, 12 и 13 равен 90°, степень неравномерности вращения пальцев 10 и 11 составит δ=tgα1=tg 15°=0,268.
угол скрещивания геометрических осей пальцев звеньев 1, 7 и 8 α1=15°, угол расположения геометрических осей шарниров звеньев 2, 12 и 13 равен 90°, степень неравномерности вращения пальцев 10 и 11 составит δ=tgα1=tg 15°=0,268.
Максимальное значение угловой скорости можно определить, если принять частоту n вращения ведущего звена, равное n=120 мин-1 (ω=πn/30=3,14⋅120/30=12,56 рад/с) по формуле,

Минимальное значение угловой скорости определится по формуле,

Итак, при частоте вращения ведущего звена, равное 120 мин-1, максимальное значение угловой скорости равно 20,41 рад/с, а минимальное - равно 15,07 рад/с.
Шарнирно-рычажный механизм с вышеуказанными параметрами, изготовленный в металле, показан на фиг. 2, привод ведущего звена осуществляется от мотор-редуктора через клиноременную передачу, механизм показал работоспособность и достоверность технического решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2605955C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ ЖИДКОСТЕЙ | 2016 |
|
RU2633902C1 |
| БАРАБАННЫЙ СМЕСИТЕЛЬ | 2013 |
|
RU2527993C1 |
| СПОСОБ ОБРАЗОВАНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПРОСТРАНСТВЕННЫХ ШАРНИРНЫХ МЕХАНИЗМОВ | 2020 |
|
RU2748814C1 |
| СМЕСИТЕЛЬ ДИФФЕРЕНЦИАЛЬНЫЙ | 2020 |
|
RU2758515C1 |
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ ГРУНТА | 2015 |
|
RU2583802C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 2015 |
|
RU2602056C2 |
| МЕШАЛКА ДЛЯ ВЯЗКИХ ЖИДКОСТЕЙ | 2016 |
|
RU2633586C1 |
| Шарнирно-рычажный механизм | 1979 |
|
SU947535A1 |
| УСТРОЙСТВО ДЛЯ ГАЛТОВКИ ДЕТАЛЕЙ | 2022 |
|
RU2813522C2 |
Изобретение относится к области машиностроения. Шестизвенный шарнирно-рычажный механизм содержит стойку, выполненную в виде звена со скрещенными под углом α1 геометрическими осями пальцев на расстоянии  ведущее звено – кривошип, шарнирно соединенный с одним из пальцев стойки и имеющий на концах шарниры, геометрические оси отверстий которых расположены под прямым углом на расстоянии
ведущее звено – кривошип, шарнирно соединенный с одним из пальцев стойки и имеющий на концах шарниры, геометрические оси отверстий которых расположены под прямым углом на расстоянии  равном
равном  при этом два промежуточных звена имеют пальцы, геометрические оси которых расположены так же, как и пальцы стойки, т.е. скрещены под углом α1 на расстоянии
при этом два промежуточных звена имеют пальцы, геометрические оси которых расположены так же, как и пальцы стойки, т.е. скрещены под углом α1 на расстоянии  и шарнирно связаны с ведущим звеном - кривошипом и с двумя подвижными звеньями - шатунами, геометрические оси шарниров которых расположены под прямым углом на расстоянии
и шарнирно связаны с ведущим звеном - кривошипом и с двумя подвижными звеньями - шатунами, геометрические оси шарниров которых расположены под прямым углом на расстоянии  а два промежуточных звена являются ведомыми звеньями - кривошипами, на пальцах которых закреплены шайбы для соединения с исполнительным рабочим элементом. Обеспечивается упрощение конструкции и увеличение функций механизма. 2 ил.
а два промежуточных звена являются ведомыми звеньями - кривошипами, на пальцах которых закреплены шайбы для соединения с исполнительным рабочим элементом. Обеспечивается упрощение конструкции и увеличение функций механизма. 2 ил.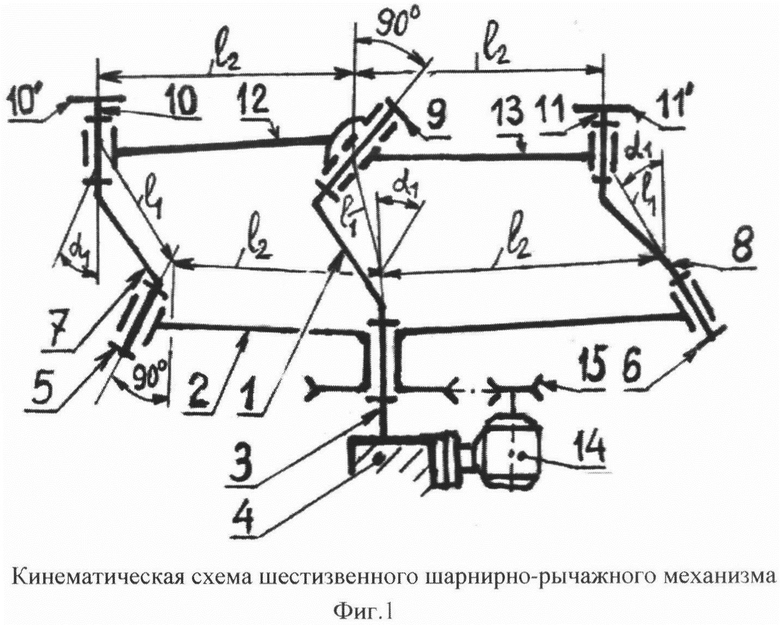
Шестизвенный шарнирно-рычажный механизм, содержащий стойку, ведущее и ведомое звенья, промежуточное звено и два подвижных звена - шатуна, шарнирно связанных между собой, отличающийся тем, что стойка выполнена в виде звена со скрещенными под углом α1 геометрическими осями пальцев на расстоянии  ведущее звено - кривошип шарнирно соединено с одним из пальцев стойки и имеет на концах шарниры, геометрические оси отверстий которых расположены под прямым углом на расстоянии
ведущее звено - кривошип шарнирно соединено с одним из пальцев стойки и имеет на концах шарниры, геометрические оси отверстий которых расположены под прямым углом на расстоянии  равном
равном  при этом два промежуточных звена имеют пальцы, геометрические оси которых расположены так же, как и пальцы стойки, т.е. скрещены под углом α1 на расстоянии
при этом два промежуточных звена имеют пальцы, геометрические оси которых расположены так же, как и пальцы стойки, т.е. скрещены под углом α1 на расстоянии  и шарнирно связаны с ведущим звеном - кривошипом и с двумя подвижными звеньями - шатунами, геометрические оси шарниров которых расположены под прямым углом на расстоянии
и шарнирно связаны с ведущим звеном - кривошипом и с двумя подвижными звеньями - шатунами, геометрические оси шарниров которых расположены под прямым углом на расстоянии  а два промежуточных звена являются ведомыми звеньями - кривошипами, на пальцах которых закреплены шайбы для соединения с исполнительным рабочим элементом.
а два промежуточных звена являются ведомыми звеньями - кривошипами, на пальцах которых закреплены шайбы для соединения с исполнительным рабочим элементом.
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2605955C1 |
| 0 |
|
SU163709A1 | |
| JP 55119254 A, 12.09.1980. | |||

