Изобретение относится к перемешивающим устройствам для смешивания жидкостей и может быть использовано во многих технологических процессах. Например, для интенсификации химических, тепловых и массообменных процессов, а также для приготовления растворов, эмульсий и суспензий.
Наиболее распространенным является механическое перемешивание жидких сред.
Известны конструкции перемешивающих устройств, включающие мешающий орган, например лопасти, которые приводятся во вращательное движение рычажным механизмом.
Известное устройство (патент США №3602485, кл. 259-110, 1971) включает резервуар, внутри которого размещены лопасти, которые приводятся во вращательное движение посредством шарнирно-рычажного механизма и поворотного рычага, качающегося вокруг точки опоры, один конец рычага связан с кривошипом механизма, а другой - с лопастями мешалки.
Недостаток устройства заключается в незначительной строго ограниченной по величине степени неравномерности вращения, что не обеспечивает высокой эффективности перемешивания компонентов, а также сложностью и ненадежностью конструкции привода (привод содержит 20 наименований деталей).
В качестве ближайшего аналога (прототипа) выбрано устройство для перемешивания жидкостей (авт. св. №617058 СССР. Устройство для перемешивания жидкостей. Заявл. 25.12.1975, опубл. 30.07.1978, БИ №28).
Это устройство состоит из резервуара, источника привода, рабочего органа, например вала с лопастями, и передаточного рычажного механизма, состоящего из двух пространственных кривошипов и двух шатунов, при этом длина одного шатуна больше длины другого на длину ведомого кривошипа, который соединен с рабочим валом.
К недостаткам этого устройства-прототипа относятся сложность передаточного рычажного механизма, ограниченная возможность регулирования степени неравномерности вращения рабочего вала с лопастями, следовательно, низкая степень интенсификации процесса перемешивания компонентов.
Цель изобретения - упрощение конструкции устройства, увеличение регулирования степени неравномерности вращения рабочего вала с лопастями в широких пределах, следовательно, увеличение интенсификации процесса перемешивания.
Указанная цель достигается тем, что устройство для перемешивания жидкостей, содержащее резервуар, источник привода, рабочий вал с лопастями, два пространственных кривошипа, снабжено одним шатуном, связанным шарнирно с ведущим и ведомым кривошипами, при этом угол скрещивания геометрических осей шарниров шатуна и геометрических осей валов вращения кривошипов расположен в пределах от 30 до 90°, а угол скрещивания геометрических осей шарниров кривошипов расположен в пределах от 10 до 55°, и кратчайшие расстояния между геометрическими осями шарниров кривошипов и шатуна связаны соотношением  а лопасти закреплены на рабочем валу под углом β к его оси в пределах от 30 до 60°.
а лопасти закреплены на рабочем валу под углом β к его оси в пределах от 30 до 60°.
Общими признаками прототипа и предложенного устройства для перемешивания жидкостей являются наличие резервуара, источника привода, рабочего вала с лопастями и двух кривошипов со скрещенными геометрическими осями шарниров.
Отличительными признаками предложенного устройства для перемешивания жидкостей от устройства прототипа являются следующие:
- наличие одного шатуна, в прототипе два шатуна;
- в предложенном устройстве ведущий и ведомый кривошипы имеют одинаковые параметры: углы скрещивания геометрических осей шарниров и кратчайшие расстояния между их осями шарниров равны, у прототипа нет сведений о значениях углов и кратчайших расстояний;
- в предложенном устройстве параметры шатуна имеют конкретные значения угла скрещивания геометрических осей его шарниров и кратчайшее расстояние между осями, в прототипе таких параметров у шатунов нет;
- в предложенном устройстве параметры кривошипов и шатуна связаны соотношением , у прототипа связи между параметрами кривошипов и шатунов не указаны;
- в предложенном устройстве приведены значения степени неравномерности вращения рабочего вала в зависимости от параметров кривошипов и шатуна, у прототипа таких данных не указано;
- в предложенном устройстве лопасти закреплены под углом β в пределах 30-60°, в прототипе таких сведений нет.
Цель изобретения достигается благодаря тому, что устройство для перемешивания жидкостей снабжено двумя одинаковыми кривошипами и одним шатуном, особым, пространственным расположением геометрических осей шарниров двух кривошипов и шатуна, закреплением лопастей на рабочем вале под углом β.
Такая совокупность признаков обеспечивает движение рабочего вал с лопастями с переменной за оборот угловой скоростью. Рабочие лопасти охватывают движением жидкости по всему объему корпуса резервуара, обеспечивая турбулентный процесс.
Дополнительный эффект интенсификации возникает еще от инерционного силового воздействия лопастей, имеющих переменную угловую скорость движения.
Все это позволяет производить смесеобразование любых жидкостей за короткий промежуток времени с высоким качеством (однородностью).
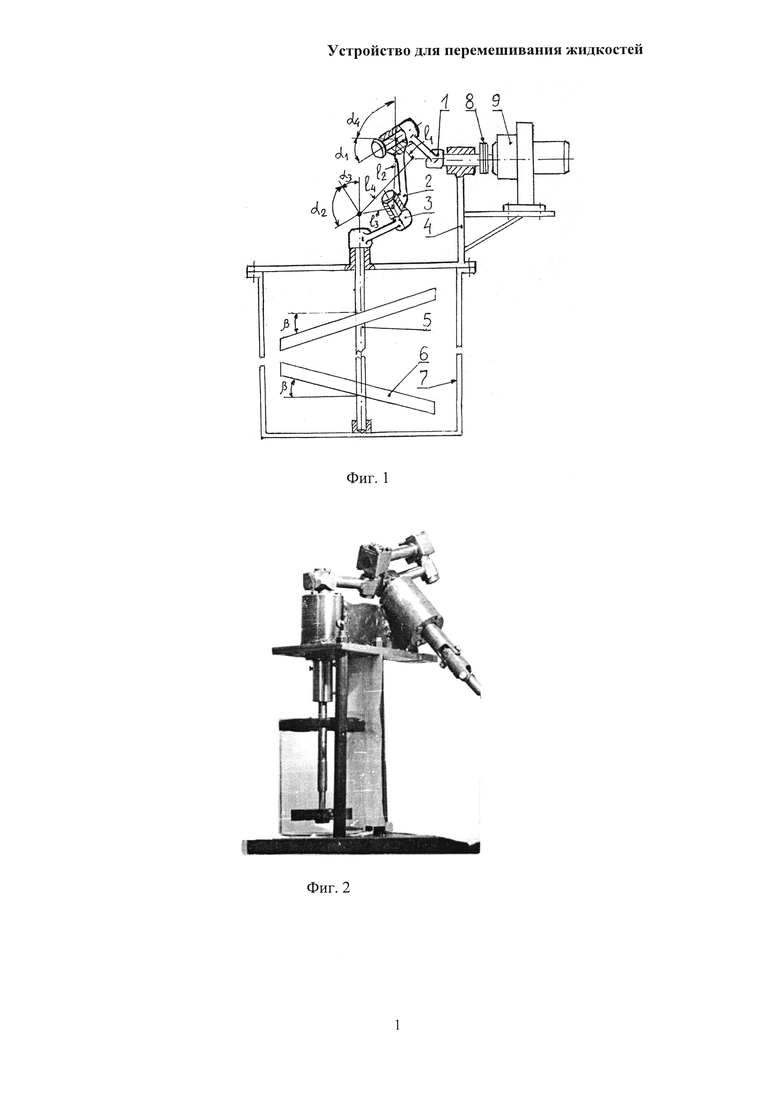
Техническая сущность и принцип действия предложенного устройства поясняются чертежами, где на фиг. 1 показана кинематическая схема мешалки с углом скрещивания геометрических осей шатуна, равным 90° (на схеме углы скрещивания и кратчайшие расстояния показаны с некоторым искажением, так как точно изобразить пространственное (трехмерное) расположение элементов мешалки на плоскости затруднительно); на фиг. 2 - фото лабораторного устройства с углом скрещивания геометрических осей шарниров шатуна, равного 45°.
Устройство для перемешивания жидкостей (фиг. 1) содержит ведущий кривошип 1, шарнирно соединенный с шатуном 2, последний шарнирно связан с ведомым кривошипом 3. Валы вращения валов кривошипов 1 и 3 шарнирно установлены в корпусе стойки 4. Ведомый кривошип 3 соединен с рабочим валом 5, на котором закреплены под углом β лопасти 6. Стойка 4 закреплена болтами на корпусе резервуара 7 и служит крышкой резервуара.
Вал ведущего кривошипа 1 посредством муфты 8 соединен с валом источника привода 9 (мотор-редуктор).
Особенность кривошипов и шатуна заключается в значении их параметров: углов скрещивания (скрещивающиеся оси - это оси, которые не параллельны и нигде не пересекаются между собой) геометрических осей шарниров и кратчайших расстояний между этими геометрическими осями (кратчайшие расстояния измеряются не по телу, а находятся вне тела и подсчитываются с учетом размеров шарниров).
Параметры кривошипов и шатуна имеют следующие значения.
У ведущего кривошипа 1 геометрические оси шарниров скрещены под углом α1 и отстоят друг от друга на кратчайшем расстоянии  Значение угла может находиться в пределах от 10 до 55°. Точно такие же параметры имеет и ведомый кривошип 3, т.е. α1=α3 и
Значение угла может находиться в пределах от 10 до 55°. Точно такие же параметры имеет и ведомый кривошип 3, т.е. α1=α3 и 
Кратчайшее расстояние определяется из отношений кратчайших расстояний между геометрическими осями шарниров ведущего (ведомого) кривошипа и шатуна и синусов углов скрещивания геометрических осей их шарниров, т.е. 
Шатун 2 имеет угол α2 скрещивания геометрических осей шарниров, который может принимать значения от 30 до 90°, наиболее приемлемые по условию изготовления и по значению степени неравномерности вращения рабочего вала.
Кратчайшее расстояние  между геометрическими осями шарниров шатуна 2 выбирается конструктивно, исходя из размеров резервуара, кривошипов, источника привода и соотношения
между геометрическими осями шарниров шатуна 2 выбирается конструктивно, исходя из размеров резервуара, кривошипов, источника привода и соотношения 
Геометрические оси валов ведущего и ведомого кривошипов скрещены под углом α4, равным углу α2 скрещивания геометрических осей шарниров шатуна 2, т.е. α4=α2.
На фиг. 2 показано лабораторное устройство для перемешивания жидкостей, у которого угол α4=α2=45°.
Кратчайшее расстояние  между геометрическими осями валов кривошипов равно кратчайшему расстоянию
между геометрическими осями валов кривошипов равно кратчайшему расстоянию  между геометрическими осями шарниров шатуна 2, т.е.
между геометрическими осями шарниров шатуна 2, т.е. 
Параметры кривошипов и шатуна связаны соотношением 
В устройстве все шарнирные соединения кривошипов и шатуна оформлены на стандартных подшипниках качения, которые имеют высокий КПД (пара подшипников порядка 0,98-0,99). Следовательно, устройство имеет и малые энергозатраты.
Устройство для перемешивания жидкостей работает следующим образом.
От источника привода 9 вращение передается ведущему кривошипу 1, который передает движение шатуну 2, и ведомому кривошипу 3. Ведущий кривошип 1 вращается с постоянной угловой скоростью за счет пространственного расположения геометрических осей шарниров кривошипов и шатуна, ведомый кривошип и рабочий вал 5 с лопастями 6 имеют переменную угловую скорость. Лопасти 6, закрепленные на рабочем валу 5, охватывают движением весь объем корпуса резервуара 7. Жидкость в результате получает турбулентное движение по всему объему резервуара с дополнительным инерционным воздействием, обеспечивая наивысшую интенсификацию перемешивания жидких компонентов.
Угловая скорость ω3 рабочего вала с лопастями определяется выражением

где ω - угловая скорость ведущего кривошипа 1 (вала источника привода).
Максимальное значение угловой скорости будет при угле поворота ведущего кривошипа, равном 0°,

Минимальное значение будет при угле поворота, равном 180°,

Степень неравномерности вращения рабочего вала с лопастями определится выражением

Интенсивность перемешивания регулируется частотой вращения кривошипов, а также параметрами кривошипов и шатуна (см. таблицу).
Технико-экономическая эффективность устройства выражается в упрощении конструкции устройства и значительном повышении однородности смеси и повышении производительности перемешивания.
Пример конструктивного воплощения устройства
При практическом проектировании устройства можно использовать два варианта. В первом случае, по конструктивным соображениям, назначают удобные для пользователя параметры, например угол скрещивания α4=α2 геометрических осей валов вращения кривошипов, кратчайшее расстояние  между ними и угол α1=α3 скрещивания геометрических осей шарниров кривошипов, а недостающий параметр определяют из соотношения
между ними и угол α1=α3 скрещивания геометрических осей шарниров кривошипов, а недостающий параметр определяют из соотношения 
Можно задаться любыми тремя параметрами, например, α4,  ,
, и определить недостающий параметр α1 по формуле
и определить недостающий параметр α1 по формуле  .
.
Пример 1. Примем угол α4=α2 равным 45°, как показано на фиг. 2, кратчайшее расстояние равное 200 мм и угол α1=α3 равным 20°. Тогда недостающий параметр кратчайшее расстояние определится 
Степень неравномерности определится по выражению (4)

Пример 2. Примем угол α4=α2 равным 45°, равным 200 мм и  тогда угол α1 определится по выражению
тогда угол α1 определится по выражению

Пример 3. Проектирование по заданной степени неравномерности δ. Руководствуясь конструктивными соображениями, назначим параметры шатуна: угол α4=α2 равным 45° и кратчайшее расстояние равным 200 мм, неизвестный угол α1 скрещивания геометрических осей шарниров кривошипов определится по требуемой степени неравномерности δ вращения лопастей, которую примем равной 2,08 по формуле
 и
и
кратчайшее расстояние  из формулы взаимосвязи
из формулы взаимосвязи  ,
,

Как видно из приведенных примеров, конструировать устройство для перемешивания жидкостей можно разными вариантами, которые дают достоверные результаты каждого из вариантов.
На стадии конструирования параметры устройства можно выбирать из данных таблицы.
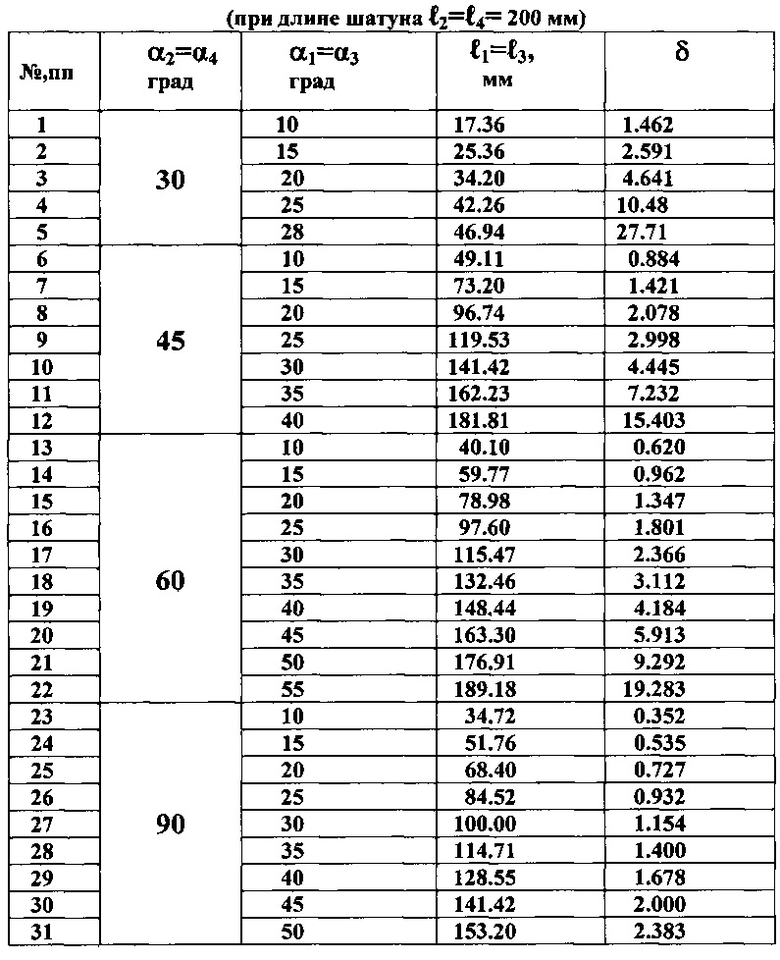
Как видно из таблицы, чем меньше по величине отличаются углы α1 и α2, тем больше неравномерность вращения ведомого кривошипа. Отсюда следует, что неравномерность вращения ведомого кривошипа практически с любой степенью неравномерности можно с достаточной точностью обеспечивать при проектировании устройства на самой ранней стадии.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕШАЛКА ДЛЯ ВЯЗКИХ ЖИДКОСТЕЙ | 2016 |
|
RU2633586C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2019 |
|
RU2713662C1 |
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ ГРУНТА | 2015 |
|
RU2583802C1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2605955C1 |
| СМЕСИТЕЛЬ ДИФФЕРЕНЦИАЛЬНЫЙ | 2020 |
|
RU2758515C1 |
| УСТРОЙСТВО ДЛЯ ГАЛТОВКИ ДЕТАЛЕЙ | 2022 |
|
RU2813522C2 |
| Устройство для гальванопластической обработки деталей | 1984 |
|
SU1186706A1 |
| РЕЖУЩИЙ АППАРАТ ЖАТВЕННЫХ МАШИН | 2015 |
|
RU2606095C1 |
| СПОСОБ ОБРАЗОВАНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПРОСТРАНСТВЕННЫХ ШАРНИРНЫХ МЕХАНИЗМОВ | 2020 |
|
RU2748814C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНОГО АППАРАТА | 2015 |
|
RU2602056C2 |
Изобретение относится к перемешивающим устройствам для смешивания жидкостей и может быть использовано, например, для интенсификации химических, тепловых и массообменных процессов, а также для приготовления растворов, эмульсий и суспензий. Устройство для перемешивания жидкостей снабжено двумя одинаковыми кривошипами и одним шатуном, у которых особое, пространственное расположение геометрических осей шарниров обоих кривошипов и шатуна, закреплением лопастей на рабочем валу под углом. Так, угол скрещивания осей шарниров кривошипом расположен в пределах от 10 до 55°, а угол скрещивания валов вращения кривошипов и осей шатуна - в пределах от 30 до 90°, параметры кривошипов и шатуна связаны соотношением  и рабочие лопасти закреплены на валу под углом β в пределах 30-60°. Технический результат изобретения заключается в упрощении конструкции устройства и значительном повышении интенсификации перемешивания, однородности смеси и производительности перемешивания. 2 ил., 1 табл.
и рабочие лопасти закреплены на валу под углом β в пределах 30-60°. Технический результат изобретения заключается в упрощении конструкции устройства и значительном повышении интенсификации перемешивания, однородности смеси и производительности перемешивания. 2 ил., 1 табл.
Устройство для перемешивания жидкостей, содержащее резервуар, источник привода, рабочий вал с лопастями, два пространственных кривошипа, отличающееся тем, что оно снабжено одним шатуном, связанным шарнирно с ведущим и ведомым кривошипами, при этом угол скрещивания геометрических осей шарниров шатуна и геометрических осей валов вращения кривошипов расположен в пределах от 30 до 90°, а угол скрещивания геометрических осей шарниров кривошипов расположен в пределах от 10 до 55°, и кратчайшие расстояния между геометрическими осями шарниров кривошипов и шатуна связаны соотношением  , а лопасти закреплены на рабочем валу под углом β к его оси в пределах от 30 до 60°, где sinα1 - отношение катета противолежащего углу α1 к гипотенузе, a sinα2 - отношение катета противолежащего углу α2 к гипотенузе.
, а лопасти закреплены на рабочем валу под углом β к его оси в пределах от 30 до 60°, где sinα1 - отношение катета противолежащего углу α1 к гипотенузе, a sinα2 - отношение катета противолежащего углу α2 к гипотенузе.
| Устройство для перемешивания жидкостей | 1975 |
|
SU617058A1 |
| Смеситель | 1979 |
|
SU887201A1 |
| ПЕРЕМЕШИВАЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2535698C1 |
| Перемешивающее устройство | 1983 |
|
SU1473830A1 |
| US 3602485 A, 31.08.1971 | |||
| WO 1988008327 A1, 03.11.1988. | |||

