Область техники, к которой относится изобретение
Изобретение относится к области видеонаблюдения, преимущественно открытых пространств, с контролем пожарной опасности, а конкретно к способам распознавания природных пожаров в пригоризонтных областях, при котором устанавливают на высотном сооружении вращающуюся вокруг вертикальной оси видеокамеру, производят съемку территории путем последовательного поворота видеокамеры вокруг вертикальной оси, производят анализ полученных изображений на предмет наличия в пригоризонтных областях кадра объектов, по цвету схожих с дымом, при наличии таковых фиксируют возможность природного пожара, и может быть использовано для выявления природных пожаров – возгорания степей, лесных пожаров (к которым также относятся и торфяные пожары), в дальних (пригоризонтых) областях при наблюдении с высотных сооружений.
В данном описании используются следующие термины:
высотное сооружение – здание, вышка, любое сооружение, высотой намного превосходящее высоту окружающих объектов, позволяющее производить наблюдение окружающего рельефа местности;
вертикаль – направление, параллельное силе тяжести;
горизонталь – направление, перпендикулярное силе тяжести;
угол наклона – угол между осью поворота видеокамеры и вертикалью;
азимутальный угол видеокамеры – угол ориентации видеокамеры относительно направления на север;
модель срезов рельефа – графическое или цифровое представление топографической поверхности в виде растра или регулярной сети ячеек заданного размера;
база данных карт высот рельефа - база данных, содержащая данные о высотах точек земной поверхности, например матрица высот SRTM (Shuttle radar topographic mission) – международная миссия по получению данных цифровой модели рельефа (ЦМР) территории Земли;
расчетная линия горизонта – линия горизонта, которая вычисляется по базе данных карт высот рельефа по известной высоте расположения видеокамеры,
пригоризонтный – находящийся вблизи линии горизонта (так как речь идет об определении пожаров, то пожары могут определяться в ближней зоне, и в отличие от нее – в дальней, около горизонта).
Уровень техники
Для выявления природных (степных и лесных) пожаров при наблюдении с высотных сооружений с помощью вращающейся вокруг вертикальной оси видеокамеры известны способы автоматического распознавания дыма, которые работают на основе распознавания по движению, цвету/яркости/контрасту и модели поведения групп пикселов в анализируемом кадре.
Такой традиционный способ имеет ограничение, связанное с тем, что ему нужно «видеть» движение - для принятия решения о проверке на цвет и/или контраст и/или яркость движущегося пятна и для оценки на соответствие модели поведения или распространения. Ограничением является пороговое количество пикселей в движущемся участке изображения, достаточное для определения поведения.
Поэтому для того, чтобы распознать дальний пригоризонтный дым, традиционным способом, нужно приблизить удаленную сцену. Специфика системы мониторинга природных пожаров с помощью поворотных камер такова. Камера постоянно поворачивается в новые положения – «патрулирует» территорию. Если угол обзора (напрямую связанный с кратностью приближения объектива - трансфокатора) будет очень мал (сильно приближать анализируемую сцену), то точек остановки в патруле будет много, а время для анализа сцены в каждой точке остановки не меняется. Значит, с уменьшением угла обзора для единичной анализируемой сцены, увеличивается время, за которое камера совершит полный оборот вокруг своей оси (закончит цикл патрулирования) и осмотрит всю подконтрольную территорию. Кроме того, многократное приближение сужает не только горизонтальный угол обзора сцены, но и вертикальный угол обзора, то есть в поле зрения камеры одновременно не попадают ближние и дальние объекты ("дымы"). То есть, чтобы осмотреть всю подконтрольную территорию, её надо пройти несколько раз – больше точек остановки из-за узкого горизонтального угла обзора и больше «слоев» или «уровней» патрулирования (ближе-дальше) из-за узкого вертикального угла.
Можно сократить время, необходимое на полную съемку контролируемой территории, применением нескольких маршрутов патрулирования для ближних и дальних дымов, комбинируя широкий угол обзора для поиска ближних дымов и узкий угол для дальних.
Но такой способ создает повышенную нагрузку на трансфокатор видеокамеры, и она быстро выходит из строя.
Из уровня техники известен способ распознавания природных пожаров в пригоризонтных областях, при котором устанавливают на высотном сооружении вращающуюся вокруг вертикальной оси видеокамеру, производят съемку территории путем последовательного поворота видеокамеры вокруг вертикальной оси, производят анализ полученных изображений на предмет наличия в пригоризонтных областях кадра объектов, по цвету схожих с дымом, при наличии таковых фиксируют возможность природного пожара, см. описание к патенту на изобретение № 2534827, опубликовано 10.12.2014.
Данный способ является наиболее близким по технической сути и достигаемому техническому результату и выбран за прототип предлагаемого изобретения.
Недостатком этого прототипа является невысокая практическая применимость для определения природного, например лесного пожара, связанная с тем, что:
а) ограничено расстояние, на котором распознается дым - невозможно применить указанный способ для определения дальних дымов без приближения удаленных сцен из-за отсутствия ключевого фактора определения – малого пиксельного размера объекта в кадре и отсутствия фиксируемого движения пикселов;
б) время полного осмотра территории значительное. Это плохо в первую очередь тем, что скорость обнаружения природного пожара существенно влияет на экономическую составляющую: сгорает больше леса и затраты на тушение растут, потому что площадь пожара на момент обнаружения больше, а значит, нужно больше сил и средств на его тушение;
в) самым ненадежным элементом современных камер является как раз система трансфокации (приближения, зума). Из-за постоянного изменения угла обзора нагрузка на эту систему растет, значит, и вероятность поломки камеры тоже растет;
г) при приближении удаленной сцены (уменьшении угла обзора) уменьшается "узнаваемость" территории из-за малого количества ориентиров, одновременно попадающих в кадр - автоматизированная система делает "отметку" на обнаруженном объекте и "прикладывает" кадр, в котором она нашла этот "объект".
Таким образом, проблемой, на решение которой направлено настоящее изобретение, является возможность определения природного пожара в пригоризонтной области без трансфокации видеокамеры.
Раскрытие изобретения
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить способ распознавания природных пожаров в пригоризонтных областях, позволяющий, по меньшей мере, сгладить указанный выше недостаток, а именно обеспечить возможность распознавания природного пожара в пригоризонтной области без трансфокации видеокамеры, что и является поставленной технический задачей.
Для достижения этой цели способ дополнительно содержит этапы, при которых:
по базе данных карт высот рельефа определяют расчетную линию горизонта в каждом кадре,
делают поправку на реальную линию горизонта, видимую в кадре,
проводят анализ только той области кадра, которая находится вблизи линии горизонта,
строят в анализируемой области изолинии, огибающие объединённые по цвету, яркости и контрастности пикселы изображения в сегменты,
при наличии отклонения участка изолинии от равного удаления от линии горизонта фиксируют возможность природного пожара в месте, соответствующем указанному, а при наличии изолинии, повторяющей форму горизонта, фиксируют отсутствие природного пожара в пригоризонтной области.
Благодаря данным неочевидным характеристикам появляется возможность компенсирования погрешности реального угла наклона вертикальной оси вращения видеокамеры, автоматического определения линии горизонта в кадре, появляется возможность анализировать только ту область, которая находится рядом с линией горизонта. В анализируемой области становится возможным автоматически выявлять места, которые соответствуют пожарам. Это возможно производить без трансфокации видеокамеры, что в свою очередь повышает срок ее службы, так как это наиболее частая причина поломки видеокамеры.
Кроме того, такой способ не принимает дымку или облака за задымление при природном пожаре, что повышает достоверность распознавания природного пожара.
При этом:
а. скорость прохождения маршрута патрулирования видеокамерой высокая, а значит, и скорость обнаружения пожаров высокая,
б. сохраняется ресурс трансфокатора поворотной видеокамеры,
в. сохраняется узнаваемость территории по кадру, в котором обнаружен объект за счет большего количества ориентиров в кадре.
Существует вариант предлагаемого способа, при котором проводят анализ только той области кадра, которая находится вблизи линии горизонта, причем анализируемую область задают как множество точек, находящихся на расстоянии от самой высокой и самой низкой точек линии горизонта не более чем 30 пикселей.
Благодаря данным неочевидным характеристикам появляется возможность конкретного указания размера анализируемой области, так как этого вполне достаточно для качественного анализа.
Существует также вариант предлагаемого способа, при котором фиксируют возможность природного пожара при обнаружении изолинии, длиннее, чем линия горизонта, и отклонения в этой изолинии от равного удаления от линии горизонта, существенно меньшей длины по горизонтальному измерению, чем линия горизонта.
Благодаря данным неочевидным характеристикам появляется возможность отсечения дымки и туманов от реального природного пожара, поскольку они дают отклонение изолиний по всей длине горизонта.
Существует еще один вариант предлагаемого способа, при котором проводят анализ пикселов в области кадра, ограниченной участком изолинии с отклонением от равного удаления от линии горизонта на предмет схожести по цвету с дымом.
Благодаря данным неочевидным характеристикам появляется возможность поиска дыма по цвету, так как дым имеет уникальный цвет.
Совокупность существенных признаков предлагаемого изобретения неизвестна из уровня техники для устройств аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения как устройства. Также совокупность существенных признаков предлагаемого изобретения не следует явным образом из уровня техники для устройств аналогичного назначения, что позволяет сделать вывод о соответствии критерию «изобретательский уровень» для изобретения.
Краткое описание чертежей
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
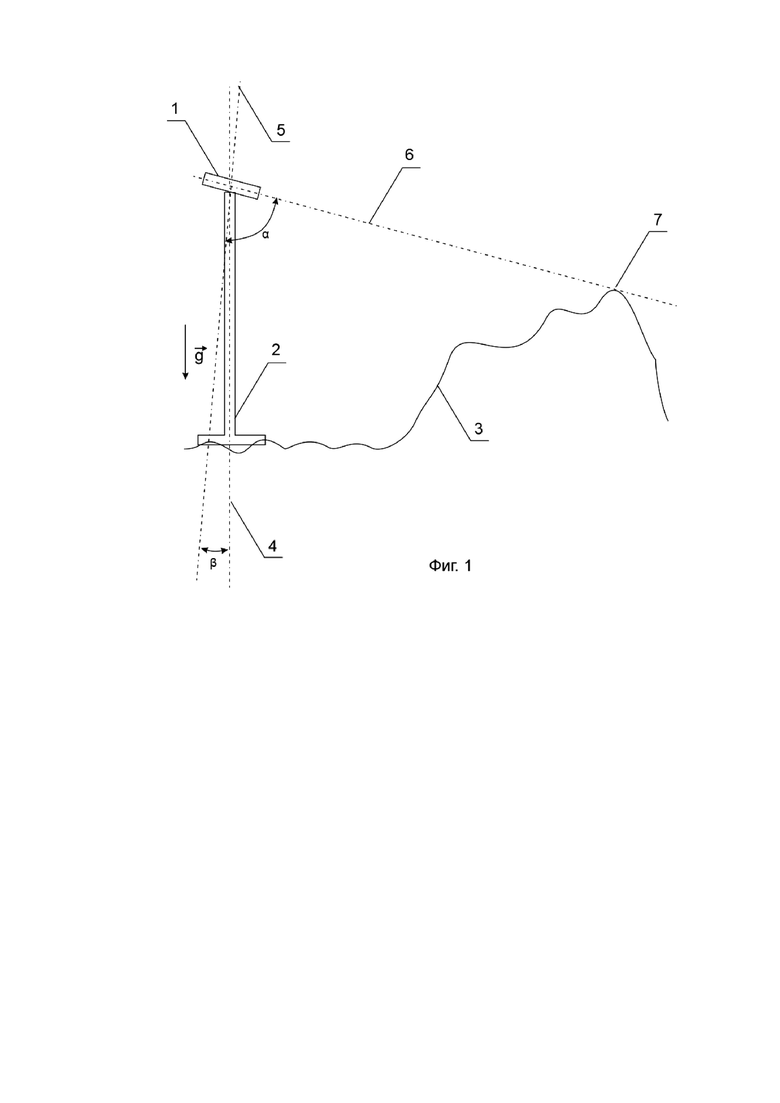
- фигура 1 изображает схематический вид сбоку на расположение видеокамеры, направленной на горизонт, согласно уровню техники, показано направление силы тяжести,
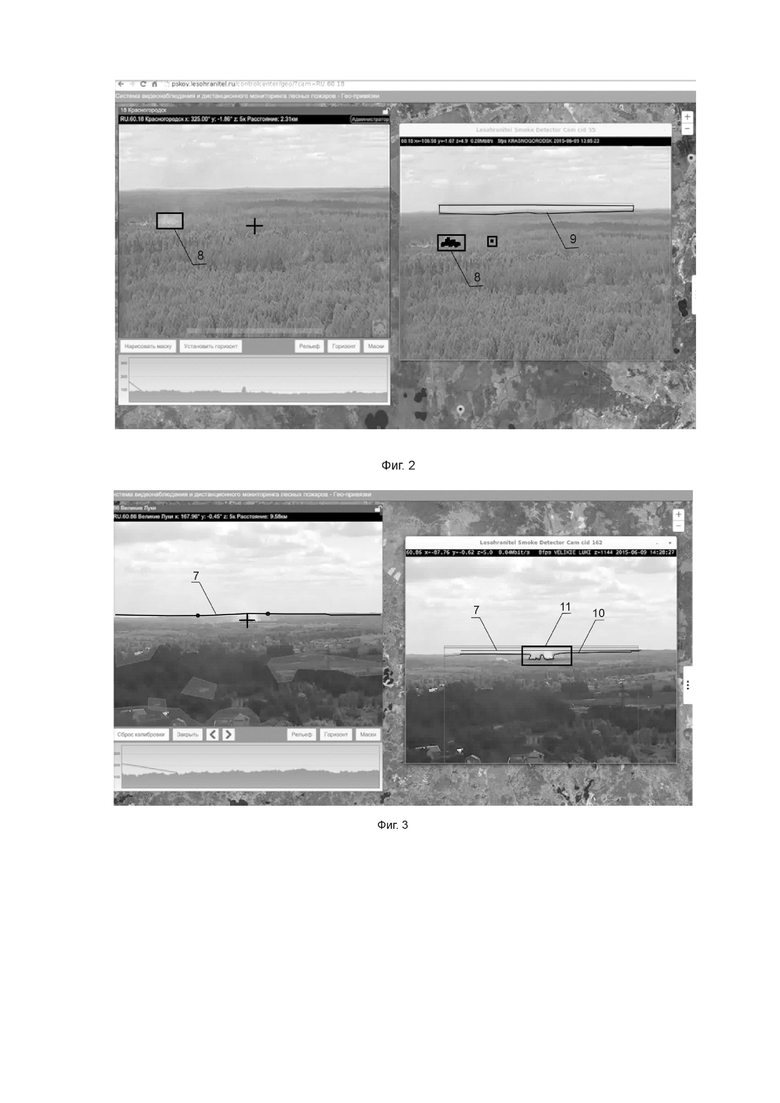
- фигура 2 изображает вид на экране изображения, полученного видеокамерой при распознавании природных пожаров в ближней и пригоризонтной областях, согласно уровню техники,
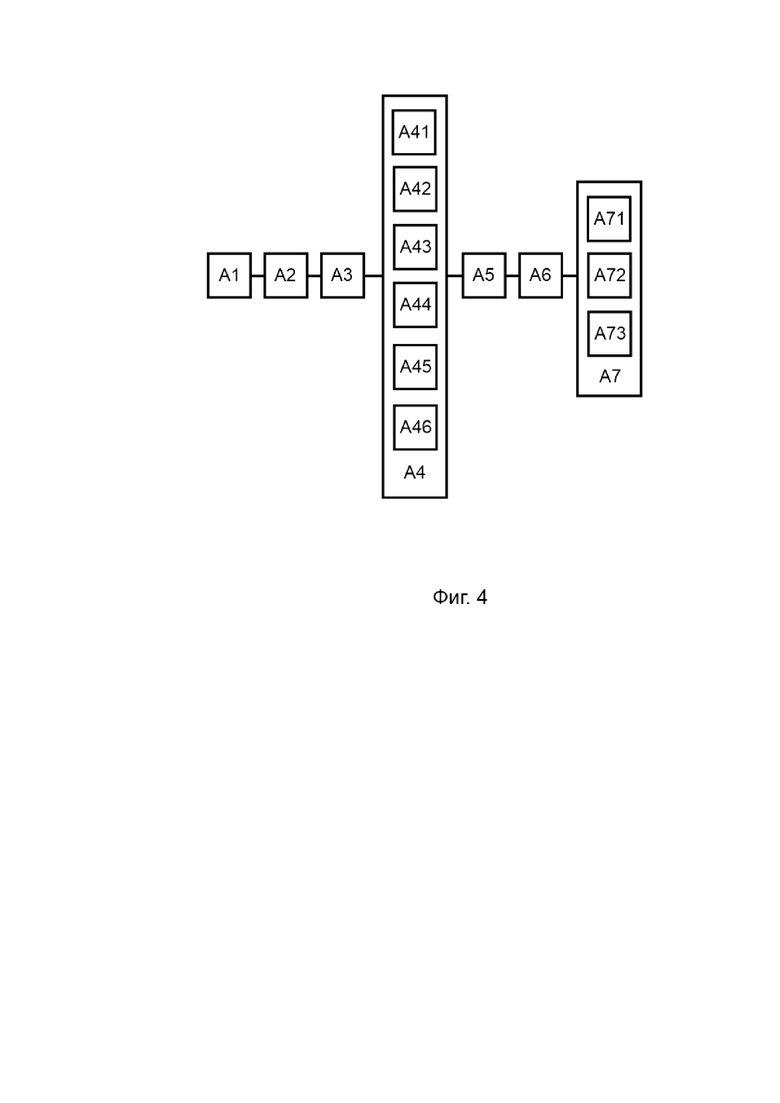
- фигура 3 изображает схематический вид на экране изображения, полученного видеокамерой при распознавании природных пожаров в пригоризонтных областях, согласно изобретению,
- фигура 4 схематично изображает этапы способа распознавания природных пожаров в пригоризонтных областях согласно изобретению.
На фигурах обозначено:
1 – видеокамера,
2 – высотное сооружение, например мачта,
3 – срез рельефа местности,
4 – вертикаль,
5 – ось вращения видеокамеры,
6 – направление окуляра видеокамеры на горизонт,
7 – видимый горизонт,
8 – распознаваемая ближняя зона,
9 – распознаваемая пригоризонтная область
10 – изолиния
11 – область отклонения участка изолинии
α – угол наклона видеокамеры,
β – поправка к углу наклона, угол между вертикалью и осью вращения видеокамеры,
g – вектор силы тяжести.
В качестве видеокамеры может использоваться любая видеокамера типа Pan-tilt-zoom-камера (PTZ-камера) — то есть видеокамера, которая поддерживает удаленное управление направлением и зумом. Она должна иметь питание и блок передачи сигнала на удаленный сервер, где производится анализ информации, а также при необходимости вывод на экран.
Осуществление изобретения
Способ распознавания природных пожаров в пригоризонтных областях заключается в следующем. Приведем наиболее исчерпывающий пример реализации изобретения, имея в виду, что данный пример не ограничивает применения изобретения.
Согласно фигуре 4:
Этап А1. Установка. Устанавливают на высотном сооружении 2 вращающуюся вокруг вертикальной оси 5 видеокамеру.
Этап А2. Привязка. Определяют ее точные координаты и высоту подвеса. Координаты видеокамеры уточняют по нескольким источникам ортофотопланов – «Гугл»-карты, «Яндекс»-карты и т.д. Таким образом, становится возможным привязать координаты установки видеокамеры – до метра.
Этап А3. Коррекция угла поворота. Рассчитывают поправку азимута поворота видеокамеры относительно направления на север путем сопоставления направления на видимый ориентир.
Этап А4. Коррекция угла наклона.
Этап А41. Создают карту рельефа радиусом 45 км вокруг координат установки видеокамеры (если нет собственной, можно брать SRTM – общедоступную карта высот рельефа на весь мир).
Этап А42. Строят модель срезов рельефа вокруг видеокамеры с шагом 0,1 градуса (что соответствует обычной погрешности механизма поворота видеокамеры) на всю глубину модели 45км, т.е. это 3600 векторов, содержащих 500 высотных отметок, каждый. Шаг между точками по срезу 90 метров.
Этап А43. Зная рельеф вокруг видеокамеры, высоту подвеса камеры и считая, что она стоит строго вертикально, получают расчетную линию горизонта (в каждом кадре пока камера поворачивается). Опорные точки линии горизонта рассчитывают как наиболее удаленные видимые точки рельефа.
Этап А44. На изображение с видеокамеры накладывают линию, составленную из точек расчетного горизонта, расположение которых пересчитано из угловых координат в пиксельные.
Этап А45. Оператор на изображении с видеокамеры указывает точки реального, а не расчетного видимого горизонта (10-12 реперных точек на 360 градусов в разных азимутальных направлениях равномерно). Чем больше реперных точек, тем точнее расчет.
Этап А46. В базу данных записывают градусы β - отклонения реального горизонта от расчетного в реперных точках, и производят интерполяционный расчет для всех остальных точек между реперными. Погрешность записывают в градусах, а не в пикселах, чтобы расчет не зависел от приближения – удаления (зума) видеокамеры, когда на один градус приходится разное количество пикселов. Полученные коэффициенты используют как поправочный угол β к углу наклона α камеры для расчета координат пересечения вектора, соответствующего линии "взгляда" видеокамеры 8 (формируемой путем проведения условной линии между центрами матрицы и линзы камеры) с рельефом в реальной работе.
Этап А5. Съемка. Производят съемку территории путем последовательного поворота видеокамеры вокруг вертикальной оси. Для этого определяют оптимальный по времени прохождения маршрута патрулирования территории и достаточности времени на анализ сцены угол обзора, например: 6 градусов по горизонтали и 10-12 минут на полный оборот камеры вокруг своей оси. При этом на анализ сцены в каждой точке остановки приходится от 10 до 15 секунд.
Этап А6. Кадрирование. По базе данных высот рельефа определяют расчетную линию горизонта в каждом кадре, с учетом поправок на реальную линию горизонта, проводят анализ только той области кадра, которая находится вблизи линии горизонта, причем анализируемую область задают как множество точек, находящихся на расстоянии от самой высокой и самой низкой точек линии горизонта не более чем 30 пикселей.
Зная, где должен быть горизонт (расчетный и с учетом поправки реальный), и все его особенности (провалы и возвышенности), отсекают область с небольшим запасом вверх и вниз от горизонта. В этой зоне изначально недостаточно пикселов, чтобы определять движение и поведение.
Этап А7. Анализ.
Разделяют наблюдаемую сцену на секции:
- над горизонтом (в этой зоне есть облака и на них способ не реагирует)
- пригоризонтная зона 9 (расстояния от точки установки камеры от 8 до 12 км)
- ближняя зона 8 (от 1 до 8 км).
В ближней зоне 8 работает классический алгоритм – достаточно информации о движении в кадре. См. фиг. 2.
В анализируемой пригоризонтной области (см. фиг. 3):
Этап А71. Строят в анализируемой пригоризонтной области изолинии 10, огибающие объединённые по цвету, яркости и контрастности пикселы изображения в сегменты. Линии, очерчивающие такие сегменты, и есть изолинии (линии между областями с похожим цветом, яркостью и контрастом).
Этап А72. Из множества изолиний выбирают изолинию 10 с наибольшей длиной, содержащую участок 11 с наибольшим отклонением от линии горизонта, который существенно меньшей длины по горизонтальному измерению, чем линия горизонта.
Этап А73. Проводят анализ пикселов в области кадра, ограниченной участком 11 выбранной изолинии 10 с наибольшим отклонением от равного удаления от линии горизонта на предмет схожести по цвету с дымом.
Этап А74. При наличии отклонения 11 участка изолинии от равного удаления от линии горизонта 7 фиксируют возможность природного пожара в месте, соответствующем указанному, а при наличии изолинии, повторяющей форму горизонта, фиксируют отсутствие природного пожара в пригоризонтной области.
В зоне, близкой к горизонту, будет наблюдаться резкий переход от светлого неба к темной земле, лесу и т.п. Небо всегда светлее земли.
Если в пригоризонтной зоне нет неучтенных в расчетной модели горизонта особенностей, то будет хотя бы одна изолиния, повторяющая в целом линию расчетного горизонта. В таком случае любая особенность (аномалия) этой изолинии может считаться потенциально опасной.
При этом способ позволяет учитывать:
- дым, находящийся по отношению к камере ближе горизонта, будет давать «провал» изолинии;
- дым, находящийся по отношению к камере дальше горизонта, будет давать «подъем» изолинии над линией горизонта.
Дымом в этом способе считают группу пикселов существенно меньшей длины по горизонтальному измерению, чем линия горизонта, то есть дым должен быть сгруппирован, а не «размазан» по всей длине линии горизонта. «Размазанный дым» считают утренней/вечерней/погодной дымкой или туманом.
Проверяют цвет/яркость/контраст пикселей из реального кадра внутри зоны, ограниченной линией горизонта и изолинией.
Ложные срабатывания могут быть из-за неточностей модели рельефа, построенной по устаревшим данным, не учитывающим изменения, которые визуально меняют горизонт (вырубки леса на возвышенностях, выработки полезных ископаемых открытым способом и т.п.). Такие места могут быть закрыты «масками» и обрабатываться на последующих этапах анализа сработок алгоритмов обнаружения дымов.
Последовательность этапов является примерной и позволяет переставлять, убавлять, добавлять или производить некоторые операции одновременно без потери возможности производить определение координат объектов. Например, этап А45 может выполняться автоматически методами автоматического распознавания реальной линии горизонта на дисплее.
Промышленная применимость
Предлагаемый способ распознавания природных пожаров в пригоризонтных областях может быть осуществлен специалистом на практике и при осуществлении обеспечивает реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
В соответствии с предложенным изобретением произведены испытания опытного образца установки, реализующей способ распознавания природных пожаров в пригоризонтных областях, состоящей из установленной на вышке видеокамеры, блока передачи данных на сервер, соединённым с компьютерным устройством, имеющим монитор.
Испытания системы показали, что она обеспечивает возможность:
- определять по базе данных карт высот рельефа расчетную линию горизонта в каждом кадре,
- делать поправку на реальную линию горизонта, видимую в кадре,
- проводить анализ только той области кадра, которая находится вблизи линии горизонта,
- строить в анализируемой области изолинии, огибающие объединённые по цвету, яркости и контрастности пикселы изображения в сегменты,
- при наличии отклонения участка изолинии от равного удаления от линии горизонта фиксировать возможность природного пожара в месте, соответствующем указанному, а при наличии изолинии, повторяющей форму горизонта, фиксировать отсутствие природного пожара в пригоризонтной области.
Таким образом, за счет того, что по базе данных карт высот рельефа определяют расчетную линию горизонта в каждом кадре, делают поправку на реальную линию горизонта, видимую в кадре, проводят анализ только той области кадра, которая находится вблизи линии горизонта, строят в анализируемой области изолинии, огибающие объединённые по цвету, яркости и контрастности пикселы изображения в сегменты, при наличии отклонения участка изолинии от равного удаления от линии горизонта фиксируют возможность природного пожара в месте, соответствующем указанному, а при наличии изолинии, повторяющей форму горизонта, фиксируют отсутствие природного пожара в пригоризонтной области и достигается заявленный технический результат, а именно возможность распознавания природного пожара в пригоризонтной области без трансфокации видеокамеры.
Дополнительный положительный эффект от анализа пригоризонтных изолиний – возможность высчитать в автоматическом режиме суточные отклонения высотных сооружений (мачт), на которых установлены поворотные камеры.
Эти отклонения связаны с неравномерным прогревом металлической конструкции мачты с разных ее сторон (солнечной и теневой).
Визуально изолинии, построенные в пригоризонтной области, должны в целом повторять наклон расчетной линии горизонта с учетом поправок, поскольку точно повторяют видимый рельеф. В случае если мачта отклонилась из-за одностороннего нагрева, вместе с ней отклонится и ось вращения камеры, поскольку камера жестко закреплена на конструкциях мачты. Изолиния, проходящая по видимой линии горизонта, будет пересекать расчетную (один конец будет выше расчетной линии, а другой – ниже). Фиксация расхождения углов наклона расчетной линии горизонта и изолиний в разных точках остановки патруля используется для уточнения поправочного угла наклона оси вращения камеры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2017 |
|
RU2646936C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМА ВЫБРОСОВ В АТМОСФЕРУ ОТ ПРИРОДНЫХ ПОЖАРОВ | 2014 |
|
RU2578515C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2504014C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО ПРОГНОЗИРОВАНИЯ ВЕРОЯТНОСТИ ВОЗНИКНОВЕНИЯ ПРИРОДНЫХ ПОЖАРОВ | 2023 |
|
RU2832688C1 |
| МОДУЛЬНЫЙ КОМПЛЕКС КОНТРОЛЯ ПРОИЗВОДСТВЕННОЙ БЕЗОПАСНОСТИ И ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 2020 |
|
RU2746652C1 |
| СПОСОБ ВИДЕОНАБЛЮДЕНИЯ ОТКРЫТОГО ПРОСТРАНСТВА С КОНТРОЛЕМ ПОЖАРНОЙ ОПАСНОСТИ | 2013 |
|
RU2534827C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ КОНФИГУРАЦИИ СИСТЕМЫ ВИДЕОМОНИТОРИНГА ЛЕСА | 2013 |
|
RU2561925C2 |
| Способ генерации карт деградации почвенного покрова | 2021 |
|
RU2769575C1 |
| СПОСОБ ПОЛУЧЕНИЯ ФОТО- ИЛИ ВИДЕОИЗОБРАЖЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ОБЪЕКТА СЪЕМКИ | 2015 |
|
RU2671551C2 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
Изобретение относится к области видеонаблюдения, преимущественно открытых пространств, с контролем пожарной опасности, а конкретно к способам распознавания природных пожаров в пригоризонтных областях. В заявленном способе распознавания природных пожаров в пригоризонтных областях устанавливают на высотном сооружении вращающуюся вокруг вертикальной оси видеокамеру, производят съемку территории путем последовательного поворота видеокамеры вокруг вертикальной оси, производят анализ полученных изображений на предмет наличия в пригоризонтных областях кадра объектов, по цвету схожих с дымом, при наличии таковых фиксируют возможность природного пожара. По базе данных карт высот рельефа определяют расчетную линию горизонта в каждом кадре, делают поправку на реальную линию горизонта, видимую в кадре, проводят анализ только той области кадра, которая находится вблизи линии горизонта, строят в анализируемой области изолинии, огибающие объединённые по цвету, яркости и контрастности пикселы изображения в сегменты. При наличии отклонения участка изолинии от равного удаления от линии горизонта фиксируют возможность природного пожара в месте, соответствующем указанному, а при наличии изолинии, повторяющей форму горизонта, фиксируют отсутствие природного пожара в пригоризонтной области. Технический результат – возможность распознавания природного пожара в пригоризонтной области без трансфокации видеокамеры. 3 з.п. ф-лы, 4 ил.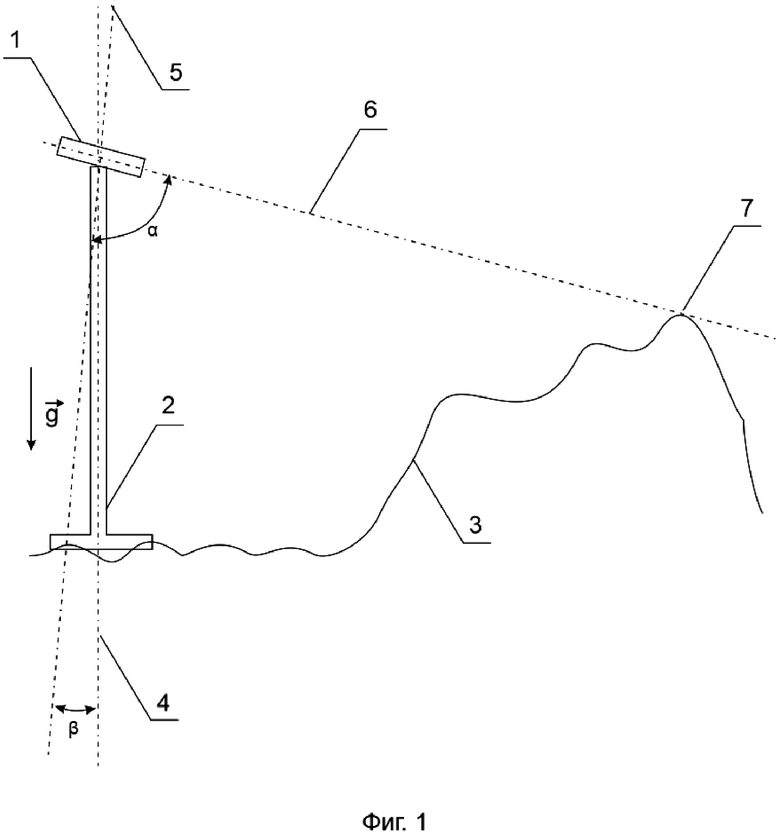
1. Способ распознавания природных пожаров в пригоризонтных областях, при котором устанавливают на высотном сооружении вращающуюся вокруг вертикальной оси видеокамеру, производят съемку территории путем последовательного поворота видеокамеры вокруг вертикальной оси, производят анализ полученных изображений на предмет наличия в пригоризонтных областях кадра объектов, по цвету схожих с дымом, при наличии таковых фиксируют возможность природного пожара, отличающийся тем, что
по базе данных карт высот рельефа определяют расчетную линию горизонта в каждом кадре,
делают поправку на реальную линию горизонта, видимую в кадре,
проводят анализ только той области кадра, которая находится вблизи линии горизонта,
строят в анализируемой области изолинии, огибающие объединённые по цвету, яркости и контрастности пикселы изображения в сегменты,
при наличии отклонения участка изолинии от равного удаления от линии горизонта фиксируют возможность природного пожара в месте, соответствующем указанному, а при наличии изолинии, повторяющей форму горизонта, фиксируют отсутствие природного пожара в пригоризонтной области.
2. Способ по п.1, отличающийся тем, что проводят анализ только той области кадра, которая находится вблизи линии горизонта, причем анализируемую область задают как множество точек, находящихся на расстоянии от самой высокой и самой низкой точек линии горизонта не более чем 30 пикселей.
3. Способ по п.1, отличающийся тем, что фиксируют возможность природного пожара при обнаружении изолинии длиннее, чем линия горизонта и отклонения в этой изолинии от равного удаления от линии горизонта, существенно меньшей длины по горизонтальному измерению, чем линия горизонта.
4. Способ по п.1, отличающийся тем, что проводят анализ пикселов в области кадра, ограниченной участком изолинии с отклонением от равного удаления от линии горизонта на предмет схожести по цвету с дымом.
| СПОСОБ ВИДЕОНАБЛЮДЕНИЯ ОТКРЫТОГО ПРОСТРАНСТВА С КОНТРОЛЕМ ПОЖАРНОЙ ОПАСНОСТИ | 2013 |
|
RU2534827C2 |
| RU 2016119050, 17.05.2016 | |||
| ЦЕНТРОБЕЖНЫЙ НАСОС ДЛЯ ВСАСЫВАНИЯ И НАГНЕТАНИЯ ВОЗДУХА ИЛИ ГАЗОВ С ПОМОЩЬЮ ЖИДКОСТИ | 1927 |
|
SU8173A1 |
| RU 2013156166, 16.12.2013 | |||
| DE 3710265 A1, 13.10.1988. | |||

