Настоящее изобретение относится в целом к области видеонаблюдения и более конкретно к способу управления системой мониторинга леса, которые в общем обеспечивают возможность вести мониторинг больших лесных территорий или территорий с/х угодий с целью раннего обнаружения пожаров с определением координат для их дальнейшей локализации и тушения.
Системы видеомониторинга леса, предназначенные для обнаружения и определения местоположения лесных пожаров, стали применяться сравнительно недавно. Тем не менее их актуальность все возрастает, поскольку проблема лесных пожаров по праву может считаться одной из наиболее серьезных и не решенных в настоящий момент человеком проблем. Лесные пожары возникают и приносят огромный ущерб во многих странах мира, свидетельством чему могут служить лесные пожары на территории Российской Федерации летом 2010 г., имевшие катастрофические последствия, в том числе и по причине невыполнения их раннего обнаружения и определения их местоположения, о чем многократно и развернуто говорилось в средствах массовой информации.
Необходимо заметить, что производительность современных электронных аппаратных средств позволяет создавать на их основе устройства визуализации и управления из состава компонентов системы видеомониторинга леса с достаточно широкой пользовательской функциональностью, что существенно упрощает работу оператора. Кроме того, современные аппаратные средства с помощью специального исполняемого ими программного обеспечения могут взять на себя некоторые функции по автоматическому обнаружению потенциально опасных объектов на видео- или фотоизображениях, получаемых с видеокамер (при мониторинге леса такими объектами может быть дым, пожар и т.п.). Такие системы компьютерного зрения для поиска на изображении опасных объектов могут использовать априорную информацию об особенностях дыма или огня, например специфичное движение, цвет, яркость, или других проявлений пожара, например определять теплый воздух от огня, с помощью тепловизора или с помощью газоанализатора обнаруживать выбросы определенных газов. Подобные системы компьютерного зрения применяются во многих отраслях промышленности, начиная от робототехники до охранных систем, что достаточно подробно изложено, например, в публикации "Компьютерное зрение. Современный подход", Д.Форсайт, Ж.Понс, издательство "Вильямс", 2004, 928 с. В рассматриваемом контексте неотъемлемой характеристикой автоматического обнаружения на основе компьютерного зрения является вероятность ложного срабатывания и пропуска цели, которые в каждой системе видеомониторинга должны быть уменьшены всеми доступными способами.
Такая интеллектуальная подсистема, использующая указанные технологии компьютерного зрения, может применяться, в зависимости от конкретного способа реализации, на рабочем месте оператора, или на сервере, или в самом управляемом видеоустройстве.
Выше представлено обобщенное структурное описание типичной современной системы видеомониторинга леса, принцип действия которой основан на использовании управляемых видеокамер. Данное обобщенное описание не подразумевается как исчерпывающее и предназначено для более понятного изложения предлагаемого изобретения, подробно описываемого ниже.
Известными примерами таких систем видеомониторинга леса являются системы ForestWatch (Канада), IPNAS (Хорватия), FireWatch (Германия). Схожие системы разработаны и в Российской Федерации (например, «Клен», «Балтика», «Лесной Дозор»).
Стоит отметить, что создание и разворачивание подобных систем видеомониторинга леса стало возможным только в последние несколько лет. Только сейчас количество вышек сотовой связи стало таковым, что покрываются основные пожароопасные места, что минимизирует затраты на инфраструктуру. Кроме того, стали существенно более доступными услуги широкополосного Интернета, позволяющие осуществлять обмен большими объемами информации и передавать через Интернет видео реального времени, уменьшилась стоимость оборудования для обеспечения беспроводной связи на большие расстояния. Также увеличилась производительность процессоров, объемы памяти и жестких дисков, что позволяет ЭВМ интеллектуально обрабатывать большие объемы данных в реальном времени. Следует дополнительно отметить, что обнаруживать лесные пожары с помощью видеокамер начали еще в конце XX - начале XXI века, но системы, предлагаемые на тот момент, представляли собой примитивные видеокамеры с функцией поворота и экран оператора, который должен был находиться в непосредственной близости от точки видеомониторинга. Предлагаемые системы практически не могли быть масштабированы и применены для обнаружения пожаров в рамках даже одного лесничества, не говоря уже о масштабах области, региона или страны.
Для существующих же систем видеомониторинга леса характерна следующая специфика - невозможно охватить всю осматриваемую территорию в один момент, т.к. камеры управляемые и в каждый момент времени они охватывают только определенную территорию. Использование же стационарных камер не обеспечивает возможности точного определения координат и ограничивает дальность обнаружения. И, следовательно, для обзора всей территории необходимо большое количество времени. Если сократить время обзора каждого участка, то вероятность обнаружения ожидаемого события уменьшится, если же время увеличить то ухудшается оперативность мониторинга, т.е. увеличивается время обнаружения, а время обнаружения для таких систем является очень важным параметром, т.к. это неотъемлемая характеристика системы, в предельном случае если наблюдение в каждой конкретной точке производится бесконечно долго, то вероятность обнаружения будет стремиться к 100%, но и время обнаружения будет также стремиться к бесконечности.
В целом системы мониторинга для успешного функционирования должны обладать следующими характеристиками.
1. Высокой надежностью обнаружения (вероятность пропуска цели, вероятность ложного срабатывания должны стремиться к минимуму).
2. Время обнаружения должно быть минимальным.
3. Точность определения координат события должна стремиться к максимуму.
4. Цена инсталляции и цена эксплуатации должны снижаться.
Таким образом, предложенное изобретение направлено на создание взаимосвязи надежности обнаружения и времени осмотра, фактически остальные характеристики не учитываются, т.е. надежность сохраняется или увеличивается для тех участков, где это действительно нужно, без серьезного ухудшения времени осмотра и качества обнаружения на других участках.
В результате реализации предложенного изобретения повышается надежность обнаружения (вероятности обнаружения), уменьшается вероятность ложного срабатывания системы, или ложного обнаружения объекта, уменьшается время необходимое на обнаружение, на осмотр и анализ информации о территории.
Этого достигает настоящее изобретение, реализуемое в способе управления системой мониторинга, содержащей, по меньшей мере, одну дистанционно управляемую точку мониторинга, содержащую размещенное на высотном сооружении электронное средство наблюдения с поворотными и управляющими устройствами, средство определения пространственной ориентации средства наблюдения и средство для получения и передачи данных, включающем следующие этапы:
- вначале собирают текущую информацию об объекте наблюдения, затем создают маршрут для осмотра территории, по меньшей мере, одним средством наблюдения, состоящий из множества точек с фиксированными значениями ориентации средства наблюдения, которые выбирают таким образом, чтобы оптимально осмотреть всю возможную по техническим характеристикам средства наблюдения, рельефу местности, высоте сооружения и зонам потенциального интереса территорию, и которые определяют множество участков наблюдения, при этом средство наблюдения просматривает каждый участок неподвижно с заданным значением угла обзора,
- далее каждому из указанного множества участков присваивают приоритет исходя из перечня приоритетных факторов, характеризующих вероятность обнаружения и возникновения возгорания, и в соответствии с которым определяют параметры маршрута осмотра, в том числе время, необходимое для обзора каждого участка, алгоритм анализа полученных в результате данных, причем на участках с высоким приоритетом параметры маршрута осмотра выбирают таким образом, чтобы вероятность обнаружения ожидаемого события при анализе полученных от средства наблюдения данных стремилась к максимальной, а вероятность ложного срабатывания находилась в оптимальных пределах, напрямую зависящих от вероятности обнаружения ожидаемого события, при этом вслед за изменением приоритетных факторов и/или окружающей обстановки изменяют приоритет для каждого из множества участков, при этом сам маршрут осмотра может оставаться неизменным, но будут изменены отдельные параметры точек.
При реализации способа качестве приоритетных факторов могут быть использованы: класс пожарной опасности по погодным условиям; информация о прогнозируемых погодных явлениях; класс пожарной опасности данной территории по типу насаждений; информация о прошедшей и/или надвигающейся грозе; информация о координатах попадания молнии; данные о наличии возгорания, полученные с других электронных средств наблюдения; горизонтальная дальность видимости на участке наблюдения; вероятность распознавания события на полученных от электронного средства наблюдения данных; информация о присутствии людей на территории наблюдения и/или наличии антропогенных объектов; информация о прохождении через объект наблюдения автомобильных и/или железных дорог; информация о статистике пожаров на территории объекта наблюдения; информация о наличии уже обнаруженного пожара.
Настоящее изобретение реализуется во всех вариантах выполнения при помощи системы, состоящей из, по меньшей мере, одной дистанционно управляемой точки мониторинга, содержащей размещенное на высотном сооружении электронное средство наблюдения с поворотными и управляющими устройствами, средство определения пространственной ориентации средства наблюдения и оборудование для получения и передачи данных, при этом согласно изобретению содержит, по меньшей мере, одно компьютеризированное рабочее место оператора и компьютерно реализованный модуль, сконфигурированный с возможностью задания маршрута для осмотра территории, по меньшей мере, одним средством наблюдения, состоящего из множества точек с фиксированными значениями ориентации средства наблюдения, на основе информации, об объекте наблюдения, полученной с точки мониторинга, а также данных о приоритетных факторах, которые могут быть получены любыми доступными способами: самой системой, из внешних систем по цифровым каналам, введены пользователями. При этом компьютерно реализованный модуль выполнен с возможностью реализации компьютерного зрения - алгоритмов распознавания на поступающих от, по меньшей мере, одного электронного средства наблюдения данных, полученных в результате наблюдения ожидаемых событий.
Вышеуказанные и иные аспекты настоящего изобретения раскрыты в нижеследующем подробном его описании.
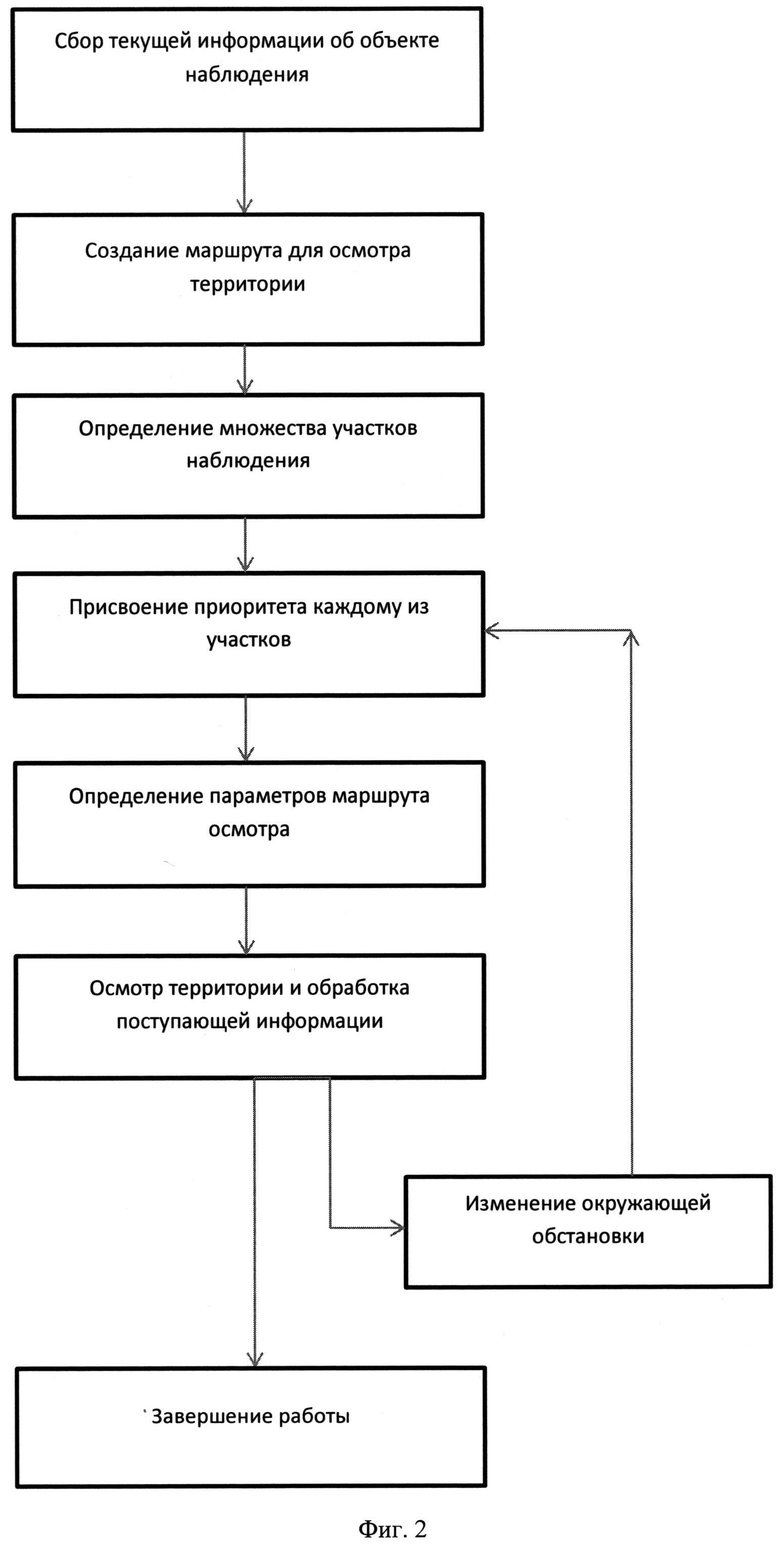
На фиг.1 схематически показана часть системы мониторинга леса; на фиг.2 - блок-схема реализации действий способа.
В типичном случае система видеомониторинга леса включает в себя одну или более дистанционно управляемых точек видеомониторинга и связанные с ними одно или более автоматизированных рабочих мест оператора для надлежащей эксплуатации точек видеомониторинга.
Оборудование автоматизированного рабочего места оператора в общем реализуется на основе широко известных компьютерных и коммуникационных технологий и в типичном случае содержит выполненный с возможностью удаленного обмена данными компьютер с установленным на нем специализированным программным обеспечением и программным обеспечением общего назначения. К компьютеру подключено дисплейное устройство, отображающее при работе компьютера ассоциированный со специализированным приложением графический пользовательский интерфейс (GUI), посредством которого оператор выполняет работу по визуальному мониторингу территории и управлению точками мониторинга, а также при наличии системы автоматического компьютерного зрения проводить валидацию обнаруженных системой объектов. Взаимодействие с элементами графического пользовательского интерфейса осуществляется с помощью широко известных устройств ввода, подключенных к компьютеру, таких как клавиатура, мышь и т.п.
Такое рабочее место оператора может быть организовано в специализированном центре контроля и мониторинга. Наличие множества автоматизированных рабочих мест оператора позволяет распределять нагрузку по нескольким операторам, что позволяет повысить качество обнаружения.
Каждая точка мониторинга, по сути, представляет собой оборудование передающей стороны, размещенное на высотном сооружении.
Высотное сооружение в общем может представлять собой любое высотное сооружение, удовлетворяющее налагаемым на систему требованиям (т.е. приспособленное для размещения оборудования передающей стороны на достаточной высоте и обеспечивающее возможность осматривать достаточно большую территорию) и обычно представляет собой вышку провайдера связи, вышку оператора сотовой связи, телевизионную вышку, вышку освещения, специализированную пожарно-наблюдательную вышку или т.п.
Обобщенным термином "оборудование передающей стороны" обозначается размещенная на высотном сооружении аппаратура, содержащая электронное средство наблюдения с поворотными и управляющими устройствами, средство определения пространственной ориентации средства наблюдения и средство для получения и передачи данных от рабочего места оператора.
Управляемое электронное средство наблюдения в общем случае представляет собой устройство, преобразующее электромагнитные волны оптического диапазона или диапазона, близкого к оптическому диапазону, в электрический сигнал (например, видеокамера, тепловизор или их комбинация), оснащенное трансфокатором, если это возможно, т.е. устройством, предназначенным для изменения фокусного расстояния приближения/удаления получаемого изображения и смонтированную на поворотном устройстве, посредством которого можно механически менять пространственную ориентацию средства с высокой точностью.
Оборудование передающей стороны также содержит устройство управления, связанное с коммуникационным модулем, средством наблюдения, трансфокатором и поворотным устройством и предназначенное для общего управления функциями управляемого устройства в целом и его компонентов в частности. Так, по приему управляющих сигналов от оператора или от сервера системы через коммуникационный модуль устройство управления приспособлено задавать требующуюся пространственную ориентацию средства наблюдения (например, для наведения ее на объект, наблюдение которого требуется, или по точке маршрута), управляя поворотным устройством, и/или выполнять приближение/удаление изображения наблюдаемого с нее объекта, управляя трансфокатором. Помимо этого устройство управления приспособлено определять текущую пространственную ориентацию средства наблюдения и выдавать данные о текущей ее пространственной ориентации через коммуникационный модуль запрашивающей стороне (в частности, на рабочее место оператора, где эти данные, например, отображаются в графическом пользовательском интерфейсе).
Устройство управления в общем представляет собой очевидный для специалиста основывающийся на микропроцессорах аппаратный блок типа контроллера, микрокомпьютера и т.п., известным образом запрограммированный и/или программируемый для выполнения предписанных ему функций. Программирование устройства управления может осуществляться, например, путем записи ("прошивки") его микропрограммного обеспечения ("firmware"), что является широко известным в технике. Соответственно, с устройством управления средством наблюдения в типичном случае связано запоминающее устройство (например, интегрированная флеш-память), в которой хранится соответствующее (микро)программное обеспечение, исполнением которого реализуются ассоциированные с устройством управления функции.
Рабочие места оператора могут быть связаны с точками мониторинга как напрямую, так и посредством сети связи (например, сети) с использованием широко известных и используемых проводных и/или беспроводных, цифровых и/или аналоговых коммуникационных технологий, при этом коммуникационный модуль точки видеомониторинга и коммуникационный интерфейс компьютера рабочего места оператора должны соответствовать коммуникационным стандартам/протоколам, на основе которых строится такая связь.
Так сеть, к которой подсоединены точки мониторинга и автоматизированные рабочие места оператора, может представлять собой адресную сеть, такую как Интернет. При наличии на месте установки точки видеомониторинга канала связи стороннего провайдера, что является распространенным случаем, предпочтительно использовать этот канал для подключения оборудования передающей стороны к Интернету. Если же в месте установки точки видеомониторинга отсутствует возможность прямого подключения к сети Интернет, применяются широко известные технологии беспроводной широкополосной связи (например, WiFi, WiMAX, 3G и т.п.) для обеспечения связи между оборудованием передающей стороны и точкой доступа в Интернет. Схожим образом осуществляется подсоединение к сети и рабочих мест оператора. В частности, для подсоединения к сети может использоваться, в зависимости от реализуемой технологии доступа, модем (в том числе беспроводной), сетевая интерфейсная плата (NIC), плата беспроводного доступа и т.п., внешние или внутренние по отношению к компьютеру рабочего места оператора.
Система также предпочтительно включает в себя подключенный к сети сервер, которому делегируются функции централизованного управления совокупностью точек видеомониторинга и их взаимодействием с рабочими местами оператора для обеспечения надежного функционирования системы. Сервер обычно представляет собой высокопроизводительный компьютер или совокупность связанных между собой компьютеров (например, стойку блейдсерверов) с установленным на него(них) специализированным серверным программным обеспечением, имеющий(их) высокоскоростное (например, оптическое) соединение с Интернетом. Аппаратная/программная реализация такого сервера является очевидной для специалиста. Помимо общих функций управления системой сервер может осуществлять и различные узкоспециализированные функции - например, он может выполнять функции видеосервера, обеспечивающего интеллектуальную промежуточную обработку данных и предоставление их пользователю по запросу.
На указанных рабочем месте оператора, сервере, управляемом электронном средстве наблюдения реализована интеллектуальная подсистема компьютерного зрения.
Эта система предназначена для поиска на изображении опасных объектов и может использовать априорную информацию об особенностях дыма или огня, например специфичное движение, цвет, яркость и т.п. В рассматриваемом контексте неотъемлемой характеристикой автоматического обнаружения на основе компьютерного зрения является вероятность ложного срабатывания и пропуска цели, которые в данной системе сводятся к минимуму предложенным способом.
Работа такого алгоритма должна основываться на возможности определения точной текущей ориентации электронного средства наблюдения.
Текущее местоположение видеокамеры может быть определено с достаточно большой точностью, например, с помощью современных средств глобального позиционирования (GPS и/или Глонасс). Что касается точности определения текущей ориентации камеры, то она также может быть достаточно высокой, что позволяют современные поворотные устройства (до 0,1-0,05 градуса, как, например, в случае управляемых видеокамер производства компании AXIS или PELCO), причем эта точность постоянно увеличивается с развитием техники.
Для управления данной системой мониторинга применяется следующий способ, включающий следующие этапы:
- вначале собирают текущую информацию об объекте наблюдения, это может быть как информация о погодных условиях, так и информация об антропогенных объектах, причем процесс сбора информации может происходить постоянно в процессе работы системы;
- затем создают маршрут для осмотра территории, по меньшей мере, одним средством наблюдения, состоящий из множества точек с фиксированными значениями ориентации средства наблюдения (угол наклона и угол поворота относительно высотного сооружения), которые выбирают таким образом, чтобы оптимально осмотреть всю возможную по техническим характеристикам средства наблюдения, рельефу местности, высоте сооружения и зонам потенциального интереса территорию, и которые определяют множество участков наблюдения, при этом средство наблюдения просматривает каждый участок неподвижно с заданным значением увеличения (если возможно управление увеличением, если это невозможно, то просто с фиксированной ориентацией);
- далее каждому из указанного множества участков присваивают приоритет исходя из перечня приоритетных факторов, характеризующих вероятность обнаружения и возникновения возгорания, и в соответствии с которым определяют параметры маршрута осмотра, в том числе время, необходимое для обзора каждого участка, алгоритм анализа полученных в результате данных, причем на участках с высоким приоритетом параметры маршрута осмотра выбирают таким образом, чтобы вероятность обнаружения ожидаемого события при анализе полученных от средства наблюдения данных стремилась к максимальной, а вероятность ложного срабатывания находилась в оптимальных пределах, напрямую зависящих от вероятности обнаружения ожидаемого события.
Маршрут может формироваться на компьютеризированном рабочем месте или, что более предпочтительно, автоматически на сервере на основе всех данных, которые поступили в систему, и направляется на, по крайней мере, одно средство наблюдения, которое, выполняя алгоритм действий маршрута, передает информацию на рабочее место оператора или на сервер, таким образом, обработка может осуществляться в любом месте, где в процессе анализа поступающей информации выводятся сообщения о наличии возгорания, задымления и других событиях, обнаружение которых запрограммировано. При изменении окружающей обстановки, ухудшении видимости, наступлении ночи/дня, возникновении тумана или дождя оператор или сама система автоматически может внести корректировки в созданный маршрут и продолжить работу с учетом изменившейся ситуации. Изменение параметров маршрута автоматически системой является наиболее предпочтительным вариантом реализации способа.
При реализации способа в качестве приоритетных факторов могут быть использованы: класс пожарной опасности по погодным условиям; информация о прогнозируемых погодных явлениях; класс пожарной опасности данной территории по типу насаждений; информация о прошедшей и/или надвигающейся грозе; информация о координатах попадания молнии; данные о наличии возгорания, полученные с других электронных средств наблюдения; горизонтальная дальность видимости на участке наблюдения; вероятность распознавания события на полученных от электронного средства наблюдения данных; информация о присутствии людей на территории наблюдения и/или наличии антропогенных объектов; информация о прохождении через объект наблюдения автомобильных и/или железных дорог; информация о статистике пожаров на территории объекта наблюдения; информация о наличии уже обнаруженного пожара.
Данная информация может быть получена при помощи справочной литературы, электронных средств наблюдения или иных источников, располагающих данной информацией (например, от информационных ресурсов погоды и т.п.).
Изобретение было раскрыто выше со ссылкой на конкретные варианты его осуществления. Для специалистов могут быть очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как она раскрыта в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ КОНФИГУРАЦИИ СИСТЕМЫ ВИДЕОМОНИТОРИНГА ЛЕСА | 2013 |
|
RU2561925C2 |
| СИСТЕМА И СПОСОБ ВИДЕОМОНИТОРИНГА ЛЕСА | 2011 |
|
RU2458407C1 |
| РАСПРЕДЕЛЕННАЯ АРХИТЕКТУРА СИСТЕМЫ ВИДЕОМОНИТОРИНГА ЛЕСА | 2013 |
|
RU2554102C2 |
| СПОСОБ И СИСТЕМА МОНИТОРИНГА ТЕРРИТОРИИ С ПОМОЩЬЮ УПРАВЛЯЕМОЙ ВИДЕОКАМЕРЫ | 2016 |
|
RU2636745C1 |
| СПОСОБ ПОЛУЧЕНИЯ ФОТО- ИЛИ ВИДЕОИЗОБРАЖЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ОБЪЕКТА СЪЕМКИ | 2015 |
|
RU2671551C2 |
| КОМПЛЕКС ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ОХРАНЯЕМОЙ ТЕРРИТОРИЕЙ | 2013 |
|
RU2542873C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ПРИРОДНЫХ ПОЖАРОВ В ПРИГОРИЗОНТНЫХ ОБЛАСТЯХ | 2017 |
|
RU2650347C1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ, ПОСТРОЕННАЯ НА ПРИНЦИПЕ РАЗНОСЕНСОРНОГО ПАНОРАМНОГО ОБЗОРА МЕСТНОСТИ С ФУНКЦИЕЙ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ОЧАГА ВОЗГОРАНИЯ | 2011 |
|
RU2486594C2 |
| КОМПЛЕКСНАЯ СИСТЕМА МОНИТОРИНГА ПРИРОДНЫХ ПОЖАРОВ | 2020 |
|
RU2747667C1 |
| СИСТЕМА МОНИТОРИНГА ЛЕСНЫХ МАССИВОВ | 2013 |
|
RU2574898C2 |
Изобретение относится в целом к области видеонаблюдения и более конкретно к способу управления системой мониторинга леса. Технический результат заключается в повышении надежности обнаружения (вероятности обнаружения), уменьшении вероятности ложного срабатывания, или ложного обнаружения объекта, уменьшении времени, необходимого на обнаружение, на осмотр и анализ информации о территории. Технический результат достигается за счет способа, который включает следующие этапы: вначале собирают текущую информацию об объекте наблюдения; создают маршрут для осмотра территории, по меньшей мере, одним средством наблюдения, состоящий из множества точек с фиксированными значениями ориентации средства наблюдения, которые выбирают таким образом, чтобы оптимально осмотреть всю возможную по техническим характеристикам средства наблюдения, рельефу местности и высоте сооружения территорию, и которые определяют множество участков наблюдения, при этом средство наблюдения просматривает каждый участок неподвижно с заданным значением увеличения. 2 н. и 12 з.п. ф-лы, 2 ил.
1. Способ, управления системой мониторинга, содержащей, по меньшей мере, одну дистанционно управляемую точку мониторинга, содержащую размещенное на высотном сооружении электронное средство наблюдения с поворотными и управляющими устройствами, средство определения пространственной ориентации средства наблюдения и средство для получения и передачи данных, включающий следующие этапы: вначале собирают текущую информацию об объекте наблюдения, затем создают маршрут для осмотра территории, по меньшей мере, одним средством наблюдения, состоящий из множества точек с фиксированными значениями ориентации средства наблюдения, которые выбирают таким образом, чтобы оптимально осмотреть всю возможную по техническим характеристикам средства наблюдения, рельефу местности, высоте сооружения и зонам потенциального интереса территорию, и которые определяют множество участков наблюдения, при этом средство наблюдения просматривает каждый участок неподвижно с заданным значением угла обзора, далее каждому из указанного множества участков присваивают приоритет исходя из перечня приоритетных факторов, характеризующих вероятность обнаружения и возникновения возгорания, и в соответствии с которым определяют параметры маршрута осмотра, в том числе время, необходимое для обзора каждого участка, алгоритм анализа полученных в результате данных, причем на участках с высоким приоритетом параметры маршрута осмотра выбирают таким образом, чтобы вероятность обнаружения ожидаемого события при анализе полученных от средства наблюдения данных стремилась к максимальной, а вероятность ложного срабатывания находилась в оптимальных пределах, напрямую зависящих от вероятности обнаружения ожидаемого события, при этом вслед за изменением приоритетных факторов и/или окружающей обстановки изменяют приоритет для каждого из множества участков.
2. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют класс пожарной опасности по погодным условиям.
3. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют информацию о прогнозируемых погодных явлениях.
4. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют класс пожарной опасности данной территории по типу насаждений.
5. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют информацию о прошедшей и/или надвигающейся грозе.
6. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют информацию о координатах попадания молнии.
7. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют данные о наличии возгорания, полученные с других электронных средств наблюдения.
8. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют горизонтальную дальность видимости на участке наблюдения.
9. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют вероятность распознавания события на полученных от электронного средства наблюдения данных.
10. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют информацию о присутствии людей на территории наблюдения и/или наличии антропогенных объектов.
11. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют информацию о прохождении через объект наблюдения автомобильных и/или железных дорог.
12. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют информацию о статистике пожаров на территории объекта наблюдения.
13. Способ по п.1, отличающийся тем, что в качестве приоритетного фактора также используют информацию о наличии уже обнаруженного пожара.
14. Система мониторинга для реализации способа по пп.1-13, состоящая из, по меньшей мере, одной дистанционно управляемой точки мониторинга, содержащей размещенное на высотном сооружении электронное средство наблюдения с поворотными и управляющими устройствами, средство определения пространственной ориентации средства наблюдения и оборудование для получения и передачи данных, характеризующееся тем, что содержит, по меньшей мере, одно компьютеризированное рабочее место оператора и компьютерно реализованный модуль, сконфигурированный с возможностью задания маршрута для осмотра территории, по меньшей мере, одним средством наблюдения, состоящего из множества точек с фиксированными значениями ориентации средства наблюдения, на основе информации об объекте наблюдения, полученной с точки мониторинга, а также данных о приоритетных факторах, и выполненный с возможностью реализации компьютерного зрения - алгоритмов распознавания на поступающих от, по меньшей мере, одного электронного средства наблюдения данных, полученных в результате наблюдения ожидаемых событий.
| RU 113046 U1, 27.01.2012 | |||
| US 6608559 B1, 19.08.2003 | |||
| УСТРОЙСТВО ПОИСКА МЕСТ УТЕЧЕК МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2439520C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОЛНИЕВОГО РАЗРЯДА И МНОГОПУНКТОВАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2253133C2 |
| Передвижной стреловый кран | 1948 |
|
SU76808A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛЕСОПОЖАРНОЙ ОПАСНОСТИ | 2006 |
|
RU2336107C2 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

