Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к области видеонаблюдения; конкретно, к системам видеомониторинга леса, которые обеспечивают возможность вести наблюдение за лесными территориями с определением координат обнаруживаемых объектов при помощи оптической пассивной локации с целью раннего обнаружения лесных пожаров для их дальнейшей локализации и тушения; более конкретно, к способу определения оптимальной конфигурации системы видеомониторинга леса.
Предшествующий уровень техники
Системы видеомониторинга леса, предназначенные для обнаружения и определения местоположения лесных пожаров, стали применяться сравнительно недавно. Тем не менее, их актуальность все возрастает, поскольку проблема лесных пожаров по праву может считаться одной из наиболее серьезных и нерешенных в настоящий момент человеком проблем. Лесные пожары возникают и приносят огромный ущерб во многих странах мира, свидетельством чему могут служить лесные пожары на территории Российской Федерации летом 2010 г., имевшие катастрофические последствия, в том числе и по причине невыполнения их раннего обнаружения и определения их местоположения, о чем многократно и развернуто говорилось в средствах массовой информации.
Ниже, со ссылкой на Фиг. 1, приведена иллюстрация базовой структуры системы видеомониторинга леса. Известными примерами таких систем видеомониторинга леса являются системы ForestWatch (Канада), IPNAS (Хорватия), FireWatch (Германия). Схожие системы разработаны и в Российской Федерации, например "Клен", "Балтика".
Иллюстрируемая на Фиг. 1 система 100 видеомониторинга леса в общем случае включает в себя множество дистанционно управляемых точек видеомониторинга 110 и связанные с ними одно или более автоматизированных рабочих мест 120 оператора для надлежащей эксплуатации точек видеомониторинга 110.
Оборудование 120 автоматизированного рабочего места оператора, в общем, реализуется на основе широко известных компьютерных и коммуникационных технологий и, в типичном случае, содержит выполненный с возможностью удаленного обмена данными компьютер с установленным на нем специализированным программным обеспечением и программным обеспечением общего назначения. Аппаратные средства и программное обеспечение общего назначения (например, операционная система) из состава такого компьютера являются широко известными в технике. При этом, под понятием "компьютер" может пониматься персональный компьютер, ноутбук, совокупность связанных между собой компьютеров и т.п.с характеристиками, отвечающими требованиям, предъявляемым к системе 100. К компьютеру подключено дисплейное устройство, отображающее при работе компьютера ассоциированный со специализированным приложением графический пользовательский интерфейс (GUI), посредством которого оператор выполняет работу по визуальному мониторингу территории и управлению точками 110 видеомониторинга. Взаимодействие с элементами графического пользовательского интерфейса осуществляется с помощью широко известных устройств ввода, подключенных к компьютеру, таких как клавиатура, мышь и т.п.
Каждая точка 110 видеомониторинга, по сути, представляет собой оборудование 111 передающей стороны, размещенное на высотном сооружении 112. Высотное сооружение 112, в общем, может представлять собой любое высотное сооружение, удовлетворяющее налагаемым на систему 100 требованиям (т.е. приспособленное для размещения оборудования передающей стороны на достаточной высоте и обеспечивающее возможность осматривать достаточно большую территорию), и обычно представляет собой вышку провайдера связи, вышку оператора сотовой связи, телевизионную вышку, вышку освещения или т.п.
Обобщенным термином "оборудование передающей стороны" 111 обозначается размещенная на высотном сооружении 112 аппаратура, содержащая управляемое видеоустройство 113 и коммуникационный модуль 114 для осуществления связи/обмена данными с рабочим местом(ами) 120 оператора.
Управляемое видеоустройство 113, в общем случае, представляет собой цифровую видеокамеру 115, оснащенную трансфокатором 116 и смонтированную на поворотном устройстве 117, посредством которого можно механически менять пространственную ориентацию видеокамеры 115 с высокой точностью.
Оборудование 111 передающей стороны также содержит устройство 118 управления видеокамерой, связанное с коммуникационным модулем 114, видеокамерой 115, трансфокатором 116 и поворотным устройством 117 и предназначенное для общего управления функциями управляемого видеоустройства 113 в целом и его компонентов в частности. Так, по приему управляющих сигналов от оператора или от другого устройства системы 100 через коммуникационный модуль 114 устройство 118 управления приспособлено задавать требующуюся пространственную ориентацию видеокамеры 115 (например, для наведения ее на объект, наблюдение которого требуется), управляя поворотным устройством 117, и/или выполнять приближение/удаление изображения наблюдаемого с нее объекта, управляя трансфокатором 116. Помимо этого, устройство 118 управления приспособлено определять текущую пространственную ориентацию видеокамеры 115 и выдавать данные о текущей ее пространственной ориентации через коммуникационный модуль 114 запрашивающей стороне (в частности, на рабочее место 120 оператора, где эти данные, например, отображаются в GUI). Перечисленные здесь функциональные возможности являются известными свойствами современных комплектов управляемых видеокамер, предлагаемых на рынке.
Устройство 118 управления, в общем, представляет собой очевидный для специалиста основывающийся на микропроцессорах аппаратный блок типа контроллера, микрокомпьютера и т.п., известным образом запрограммированный и/или программируемый для выполнения предписанных ему функций. Программирование устройства 118 управления может осуществляться, например, путем записи ("прошивки") его микропрограммного обеспечения ("firmware"), что является широко известным в технике. Соответственно, с устройством 118 управления видеокамерой, в типичном случае, связано запоминающее устройство (например, интегрированная флэш-память), в которой хранится соответствующее (микро)программное обеспечение, исполнением которого реализуются ассоциированные с устройством 118 управления функции.
Рабочие места 120 оператора могут быть связаны с точками 110 видеомониторинга как напрямую, так и посредством сети связи (например, сети 130) с использованием широко известных и используемых проводных и/или беспроводных, цифровых и/или аналоговых коммуникационных технологий, при этом коммуникационный модуль 114 точки 110 видеомониторинга и коммуникационный интерфейс компьютера рабочего места 120 оператора должны соответствовать коммуникационным стандартам/протоколам, на основе которых строится такая связь.
Так, иллюстративная сеть 130, к которой подсоединены точки видеомониторинга и автоматизированные рабочие места 120 оператора, может представлять собой адресную сеть, такую как Интернет. При наличии на месте установки точки 110 видеомониторинга канала связи стороннего провайдера, что является распространенным случаем, предпочтительно использовать этот канал для подключения оборудования 111 передающей стороны к Интернет. Если же в месте установки точки 110 видеомониторинга отсутствует возможность прямого подключения к сети Интернет, применяются широко известные технологии беспроводной широкополосной связи (например, Wi-Fi, WiMAX, 3G и т.п.) для обеспечения связи между оборудованием 111 передающей стороны и точкой доступа в Интернет. Схожим образом осуществляется подсоединение к сети 130 и рабочих мест 120 оператора. В частности, для подсоединения к сети 130 может использоваться, в зависимости от реализуемой технологии доступа, модем (в том числе, беспроводной), сетевая интерфейсная плата (NIC), плата беспроводного доступа и т.п., внешние или внутренние по отношению к компьютеру рабочего места 120 оператора.
Обычно система 100 также включает в себя подключенный к сети 130 сервер 140, которому делегируются функции централизованного управления совокупностью точек 110 видеомониторинга и их взаимодействием с рабочими местами 120 оператора для обеспечения надежного функционирования системы 100. Сервер 140 в типичном случае представляет собой высокопроизводительный компьютер или совокупность связанных между собой компьютеров (например, стойку блейд-серверов) с установленным на него (них) специализированным серверным программным обеспечением, имеющий(их) высокоскоростное (например, оптическое) соединение с Интернет. Аппаратная/программная реализация такого сервера является очевидной для специалиста. Помимо общих функций управления системой 100, сервер 140 может осуществлять и различные узкоспециализированные функции - например, он может выполнять функции видеосервера, обеспечивающего сбор и промежуточную обработку данных и предоставление их пользователю по запросу.
При таком способе организации системы видеомониторинга леса один пользователь может проводить мониторинг подконтрольной территории, одновременно управляя несколькими видеокамерами. Кроме того, за счет описанных выше характерных функциональных возможностей обеспечивается возможность автоматического быстрого определения местоположения очага возгорания при видимости с нескольких видеокамер, используя широко известный угломерный метод, а также хранение в памяти (например, на сервере 140 или в компьютере рабочего места 120 оператора) заранее определенных маршрутов патрулирования для быстрого доступа к ним и выполнения мониторинга. Здесь под "маршрутом патрулирования" понимается заранее определенная последовательность изменения ориентации камеры, предназначенная для получения визуальной информации по требуемой предопределенной территории. Иными словами, маршрут - это алгоритм осмотра территории конкретной видеокамерой.
Необходимо заметить, что производительность современных электронных аппаратных средств позволяет создавать на их основе устройства визуализации и управления из состава компонентов системы видеомониторинга леса с достаточно широкой пользовательской функциональностью, что существенно упрощает работу оператора. Кроме того, современные аппаратные средства, с помощью специального исполняемого ими программного обеспечения, могут взять на себя некоторые функции по автоматическому обнаружению потенциально опасных объектов на видео или фото изображениях, получаемых с видеокамер (при мониторинге леса такими объектами может быть дым, пожар и т.п.). Такие системы компьютерного зрения для поиска на изображении опасных объектов могут использовать априорную информацию об особенностях дыма или огня, например, специфичное движение, цвет, яркость и т.п. Подобные системы компьютерного зрения применяются во многих отраслях промышленности, начиная от робототехники до охранных систем, что достаточно подробно изложено, например, в публикации "Компьютерное зрение. Современный подход", Д. Форсайт, Ж. Понс, издательство "Вильямс", 2004, 928 с.
Такая интеллектуальная подсистема, реализующая указанные технологи компьютерного зрения, в общем может быть реализована и на рабочем месте 120 оператора, и на сервере 140, и даже в самом управляемом видеоустройстве 113.
Дополнительные аспекты систем видеомониторинга леса, связанные непосредственно с определением и обработкой координат обнаруживаемых объектов, более подробно отражены, в частности, в патентных публикациях RU 2458407, WO 2012/118403.
Стоит отметить, что создание и развертывание подобных систем видеомониторинга леса стало возможным только в последние годы. Только сейчас количество вышек сотовой связи стало таковым, что покрываются основные пожароопасные места. Кроме того, стали существенно более доступными услуги широкополосного Интернета, позволяющие осуществлять обмен большими объемами информации и передавать через Интернет видео реального времени, и уменьшилась стоимость оборудования для обеспечения беспроводной связи на большие расстояния.
Однако, указанные факторы не снимают с повестки дня актуальную задачу оптимизации развертывания и/или эксплуатации системы видеомониторинга леса на контролируемой местности, в смысле как обеспечения потребных результатов по обнаружению пожаров, так и затрачиваемых материальных и технических ресурсов. Первый из указанных аспектов оптимизации является абсолютно очевидным в виду вышеуказанного базового функционального назначения системы видеомониторинга леса - развертывание такой системы на местности без обеспечения надлежащего качества ее функционирования по базовому назначению грозит, как минимум, более значительным ущербом от пожаров на местности. При рассмотрении второго из упомянутых аспектов оптимизации следует исходить из того, что, несмотря на общую позитивную тенденцию, отмеченную в предыдущем абзаце, развертывание и эксплуатация системы видеомониторинга леса на местности сопряжены со значительными затратами ресурсов, как краткосрочными, так и длящимися. В виду этого, естественным является стремление достичь удовлетворительного качества функционирования не "любой ценой", а эффективным в плане ресурсов образом. Полярным примером неэффективности развертывания/эксплуатации системы видеомониторинга леса является то, что затрачиваемые при этом накладные ресурсные расходы заметно превосходят весь мыслимый ущерб от пожаров.
Вообще говоря, процесс подготовки к внедрению, внедрение и управление работой системы обнаружения лесных пожаров в процессе эксплуатации подразумевает способность рассчитывать ряд показателей, позволяющих:
1) экономически обосновывать внедрение;
2) сравнивать системы видеомониторинга между собой;
3) выбирать оптимальную конфигурацию системы;
4) оптимизировать настройки системы исходя из текущих параметров окружающей обстановки.
При этом, критерии, используемые при оценке по пунктам 1-4, могут быть весьма различными.
На первый план выходят проблемы оптимального определения мест размещения точек видеомониторинга, типа и режимов их работы. Нерациональное размещение, например, способно ухудшить характеристики системы видеомониторинга леса по обнаружению потенциальных возгораний в разы, а иногда на порядки. Поэтому особенно важно иметь инструмент, позволяющий по заданным критериям и ограничениям выбрать оптимальную конфигурацию системы мониторинга.
Подобного рода задачи возникают в системах связи, при оптимизации использования радиочастотного спектра и определении зон покрытия. Для решения этих задач разработано множество подходов и коммерческие программные продукты для реализации данных подходов (см., в частности, http://www.itu.int/ITU-D/tech/events/2012/ResultsWRC12 CIS StPetersburg June12/Presentations/Session4/S43.pdf, http://ru.scribd.com/doc/55805349/RPS-User-Manual).
Недостатками указанных подходов в рассматриваемом контексте является отсутствие учета специфики именно оптической локации и особенностей работы систем оптической локации в условиях естественного освещения, кроме того, они не рассчитаны на определение характеристик систем обнаружения.
Существует другой класс систем, которые рассчитаны на анализ систем видеонаблюдения на ограниченной территории, т.е. помогают определить, как территория будет осматриваться системой видеонаблюдения (см., например, http://www.jvsg.com/ip-video-system-design-tool/,
http://www.cctvcad.com/rus/quick start4 videocad6.pdf,
http://www.cctvcad.com/CCTVCAD-Download.html,
http://www.algoritm.org/arch/arch.php?id=62&a=1312).
Наиболее близким аналогом заявленного изобретения является система раннего обнаружения лесных пожаров «Лесной дозор», содержащая множество дистанционно управляемых точек видеомониторинга, каждая из которых содержит видеокамеру на высотном сооружении, один или более АРМ операторов и модуль программного обеспечения (http://www.lesdozor.ru/ru/problemy-obnaruzheniya-lesnyh-pozharov/analitika/qlesnoj-dozorq-effektivnaya-sistema-rannego-obnaruzheniya-lesnykh-pozharov).
Такие подходы учитывают специфику видеонаблюдения, характеристики оборудования оптического наблюдения (углы обзора, разрешение). В некоторых из них есть способы оптимизации.
К недостаткам таких систем в рассматриваемом контексте следует отнести слабый учет специфики наблюдения больших территорий. Для этих систем важным является лишь факт попадания объекта мониторинга в поле наблюдения (например, увидеть нарушителя на видеоизображении) при этом считается, что условия наблюдения постоянны, а вероятностные характеристики не учитываются либо учитываются достаточно слабо.
Сущность изобретения
Задачей настоящего изобретения является создание методики, которая позволяет получить достаточно точные оценки эффективности внедрения и/или эксплуатации системы видеомониторинга леса исходя из общедоступных данных и знаний принципов построения подобных систем и определять на основе таких оценок оптимальную конфигурацию системы видеомониторинга леса.
Техническим результатом применения описываемого изобретения является улучшение эффективности эксплуатации системы видеомониторинга леса, за счет определения оптимальной конфигурации системы.
Согласно одному аспекту настоящего изобретения, предложен способ определения оптимальной конфигурации системы видеомониторинга леса, содержащей множество точек видеомониторинга, каждая из которых содержит видеокамеру на высотном сооружении.
Предложенный способ содержит этап, на котором собирают множество параметров, относящихся к характеристикам точек видеомониторинга и характеристикам территории размещения точек видеомониторинга. Характеристики территории включают в себя ландшафтные характеристики, погодные данные и данные о лесных пожарах. По меньшей мере некоторые из параметров, относящихся к характеристикам точек видеомониторинга, являются контролируемыми.
Далее, согласно способу, задают один или более показателей эффективности системы видеомониторинга леса. Каждый из этих показателей эффективности является интегральной величиной, описываемой вероятностной моделью, обобщающей, по меньшей мере, часть упомянутого множества параметров. Упомянутая интегральная величина имеет один из нижеследующих смыслов и размерностей:
- Вероятность обнаружения пожара;
- Время обнаружения пожара (среднее, максимальное);
- Точность определения координат;
В том числе, показатели эффективности могут быть сформулированы с наложением дополнительных условий на обобщаемые параметры, в том числе когда условиями выступают ограничения по времени обнаружения, размерам и другим характеристикам очага возгорания, текущие метеорологические и ландшафтные условия, параметры функционирования элементов системы и пр.
Затем, согласно способу, выполняют перебор вариантов размещения точек видеомониторинга по множеству возможных позиций на территории посредством того, что устанавливают размещение точек видеомониторинга и для установленного размещения точек видеомониторинга определяют оптимальный набор параметров, оптимизирующий по меньшей мере один показатель эффективности из упомянутых одного или более показателей эффективности системы видеомониторинга леса, при этом данный показатель эффективности вычисляют с варьированием соответствующих ему контролируемых параметров.
Наконец, согласно предложенному способу, определяют оптимальную конфигурацию системы видеомониторинга леса посредством того, что сравнивают полученные варианты размещения точек видеомониторинга, для которых определены оптимальные наборы параметров, и выбирают вариант размещения с наилучшим значением упомянутого показателя эффективности.
В соответствии с предпочтительным вариантом осуществления, способ дополнительно содержит этап, на котором задают одно или более ограничений, налагаемых на упомянутый по меньшей мере один показатель эффективности. При этом, варианты размещения точек видеомониторинга, для которых этот показатель эффективности не удовлетворяет наложенным ограничениям, не учитываются при упомянутом сравнении.
В частном варианте осуществления, параметры, относящиеся к характеристикам точек видеомониторинга, включают в себя возможные разрешения, границы допустимых поворотов и скоростей поворотов камер, возможности каналов связи, границы зуммирования, возможности видеокамер по кодированию видеопотока.
Упомянутые один или более показателей эффективности могут представлять собой множество показателей эффективности системы видеомониторинга леса, при этом упомянутый по меньшей мере один показатель эффективности может быть сверткой показателей эффективности из упомянутого их множества с коэффициентами, характеризующими важность каждого отдельного показателя эффективности.
В соответствии с предпочтительным вариантом осуществления, способ дополнительно содержит этап, на котором при упомянутом выполнении перебора исключают из рассмотрения одну или более точек видеомониторинга, изменение позиции и/или характеристик которых не оказывает существенного влияния на определяемую оптимальную конфигурацию системы видеомониторинга леса.
Упомянутый перебор вариантов размещения точек видеомониторинга предпочтительно прекращают по выполнению заранее заданного условия завершения. Заранее заданным условием завершения может быть одно из следующего: устойчивое отсутствие улучшения упомянутого показателя эффективности при выполнении итераций данного перебора, исчерпание временной квоты, выделенной на выполнение перебора, достижение заранее определенного количества итераций.
При вычислении упомянутого по меньшей мере одного показателя эффективности предпочтительно вычисляют прогнозную вероятность возникновения пожара на территории за период времени и плотность вероятности реализации конкретных условий окружающей среды, оценку зависимости ущерба, нанесенного пожаром, от времени нетушения пожара и ошибки определения его координат.
Согласно другому аспекту настоящего изобретения, предложен способ оптимальной настройки системы видеомониторинга леса, содержащей множество распределенных точек видеомониторинга, каждая из которых содержит видеокамеру на высотном сооружении.
Предложенный способ содержит этап, на котором собирают множество параметров, относящихся к характеристикам точек видеомониторинга и характеристикам территории размещения точек видеомониторинга. Характеристики территории включают в себя ландшафтные характеристики, погодные данные и данные о лесных пожарах. По меньшей мере некоторые из параметров, относящихся к характеристикам точек видеомониторинга, являются контролируемыми. В частном варианте реализации ландшафтные характеристики включают в себя: границы территории интереса, карту высот местности, угол слепой зоны для видеокамеры, зоны запрета наблюдения, характеристики леса на территории (тип насаждений, плотность, вид деревьев).
Далее, согласно способу, задают по меньшей мере один показатель эффективности системы видеомониторинга леса. Этот показатель эффективности является интегральной величиной, описываемой вероятностной моделью, обобщающей упомянутое множество параметров.
В частном варианте осуществления данные о лесных пожарах включают в себя архив данных о лесных пожаров с информацией о координатах, времени и площади возгорания.
Затем, согласно способу, определяют оптимальный набор параметров, который оптимизирует упомянутый по меньшей мере один показатель эффективности системы видеомониторинга леса, при этом данный показатель эффективности вычисляют с варьированием контролируемых параметров.
В частном варианте осуществления упомянутые одно или более ограничений показателей эффективности включают в себя одно или более из следующего: ограничение на стоимость ввода системы в эксплуатацию; ограничение на полную стоимость владения в течение заданного срока; ограничение на количество вводимых в эксплуатацию точек мониторинга; ограничение снизу на вероятности обнаружения пожара на территории или в конкретных точках; ограничение сверху на времена обнаружения пожара на территории или в конкретных точках; ограничение сверху на ошибку определения координат на территории или в конкретных точках; ограничение на количество требуемых операторов системы; запрет использования более одной видеокамеры на высотном сооружении.
Наконец, согласно предложенному способу, выполняют корректировку контролируемых параметров системы видеомониторинга леса до оптимального набора параметров.
Согласно одному предпочтительному варианту осуществления, упомянутую корректировку выполняют в непрерывном режиме.
Согласно другому предпочтительному варианту осуществления, упомянутую корректировку выполняют при условии того, что полученный оптимальный набор параметров обеспечивает улучшение работы системы видеомониторинга леса в плане упомянутого по меньшей мере одного показателя эффективности на величину, не меньшую заранее заданного порога.
Упомянутое определение оптимального набора параметров предпочтительно завершают по истечении заранее заданного времени.
В частном варианте осуществления при вычислении упомянутого по меньшей мере одного показателя эффективности вычисляют прогнозную вероятность возникновения пожара на территории за период времени и плотность вероятности реализации конкретных условий окружающей среды, оценку зависимости ущерба, нанесенного пожаром, от времени нетушения пожара и ошибки определения его координат.
В частном варианте осуществления прогнозную вероятность возникновения пожара оценивают на основе архивных данных о пожарах на территории в пожароопасные сезоны и с использованием методик прогноза вероятности возникновения пожара на основе предполагаемых классов пожарной опасности с учетом возможной погодной обстановки на территории.
В частном варианте осуществления упомянутую зависимость ущерба получают на основе, по меньшей мере, данных о скорости распространения пожара для леса на территории и данных о времени нахождения очага возгорания силами тушения при определенной ошибке обнаружения координат возгорания, допущенной системой видеомониторинга леса.
Согласно еще одному аспекту настоящего изобретения, предложена система видеомониторинга леса, содержащая: множество дистанционно управляемых точек видеомониторинга, каждая из которых содержит видеокамеру на высотном сооружении; один или более операторских компьютерных терминалов; и компьютерно-реализованный модуль настройки.
Модуль настройки выполнен с возможностью рассчитывать по меньшей мере один показатель эффективности системы видеомониторинга леса. Этот показатель эффективности является интегральной величиной, описываемой вероятностной моделью, обобщающей собранное множество параметров, относящихся к характеристикам точек видеомониторинга и характеристикам территории размещения точек видеомониторинга. Характеристики территории включают в себя ландшафтные характеристики, погодные данные и данные о лесных пожарах. По меньшей мере некоторые из параметров, относящихся к характеристикам точек видеомониторинга, являются контролируемыми.
Модуль настройки сконфигурирован определять оптимальный набор параметров, который оптимизирует упомянутый по меньшей мере один показатель эффективности системы видеомониторинга леса, при этом данный показатель эффективности итерационно вычисляется с варьированием контролируемых параметров, и выполнять корректировку контролируемых параметров системы видеомониторинга леса до оптимального набора параметров.
Согласно одному предпочтительному варианту осуществления, предложенная система включает в себя сервер, и модуль настройки представляет собой программное обеспечение, исполняющееся на сервере.
Согласно другому предпочтительному варианту осуществления, модуль настройки представляет собой программное обеспечение, исполняющееся на по меньшей мере одном операторском компьютерном терминале.
Согласно еще одному предпочтительному варианту осуществления, модуль настройки представляет собой компьютерное устройство, выполненное с возможностью обмена данными с точками видеомониторинга и операторскими компьютерными терминалами.
Перечень фигур чертежей
Вышеуказанные и иные аспекты и преимущества настоящего изобретения раскрыты в нижеследующем подробном его описании, приводимом со ссылками на фигуры чертежей, на которых:
Фиг. 1 - схематическая частичная иллюстрация системы видеомониторинга леса;
Фиг. 2 - иллюстрация обнаружения пожара в точке (xf, yf) из точки (х, у) с ошибкой Е;
Фиг. 3 - график, иллюстрирующий обнаружительную способность алгоритма автоматического обнаружения пожара;
Фиг. 4 - график, иллюстрирующий обнаружительную способность системы;
Фиг. 5 - график, иллюстрирующий плотность вероятности обнаружить пожар;
Фиг. 6 - график, иллюстрирующий зависимость обнаружительной способности от площади пожара;
Фиг. 7 - график, иллюстрирующий зависимость вероятности обнаружения от времени наблюдения с учетом роста площади пожара (сплошная линия) и без учета роста площади пожара (пунктирная линия);
Фиг. 8 - логическая блок-схема способа оценки эффективности внедрения системы видеомониторинга леса;
Фиг. 9 - логическая блок-схема гибридно эволюционно-генетического алгоритма поиска оптимальной конфигурации системы видеомониторинга леса;
Фиг. 10 - логическая блок-схема способа определения оптимальной конфигурации системы видеомониторинга леса согласно настоящему изобретению;
Фиг. 11 - иллюстрация обеспечения территории интереса вероятностью обнаружения не ниже заданной;
Фиг. 12 - сравнение оптимального и неоптимального способов размещения видеокамер;
Фиг. 13 - иллюстрация территории с вероятностью обнаружения не менее заданной при неоптимальном расположении видеокамер, где места их установки отмечены треугольниками;
Фиг. 14 - иллюстрация территории с вероятностью обнаружения не менее заданной при оптимальном расположении видеокамер, где места их установки отмечены черными точками;
Фиг. 15 - логическая блок-схема способа оценки показателей системы видеомониторинга леса при ее настройке в ходе эксплуатации;
Фиг. 16 - логическая блок-схема способа оптимальной настройки системы видеомониторинга леса согласно настоящему изобретению.
Подробное описание изобретения
При последующем раскрытии настоящего изобретения будет делаться ссылка на систему 100 видеомониторинга леса по Фиг. 1, при этом описание данной системы в полной мере относится к раскрытию настоящего изобретения.
Общую постановку задачи оценки эффективности системы видеомониторинга леса целесообразно начать со следующего.
Имеется достаточно большая территория, на которой только часть занимает область мониторинга (пример: лес покрывает только часть территории области). У территории есть специфичный рельеф, специфичные условия распространения оптического сигнала от обнаруживаемого объекта (условия окружающей среды), которые определяют характеристики процесса обнаружения объекта на территории. Предполагается, что для обнаружения пожара необходимо увидеть дым, поднимающийся над кромкой леса или непосредственно открытое пламя.
Эффективность развернутой либо предполагаемой к развертыванию системы зависит от ее конфигурации: пространственного расположения точек видеомониторинга, параметров работы оборудования точек видеомониторинга (в частности, маршрута), способов обработки данных с точек и прочих параметров.
В формировании понятия эффективности задействуются параметры систем радиолокации (поскольку они близки по технологическому подходу к рассматриваемым системам оптической локации), принятые, например, в [1]. В силу того, что обнаруживаемый объект (лесной пожар) является практически неподвижным с точки зрения наблюдаемой территории, параметры, участвующие в определении эффективности работы системы, могут быть определены следующим образом:
- вероятность пропуска цели - вероятность того, что объект с заданными параметрами был на наблюдаемой территории, а система его не обнаружила. Система тем лучше, чем вероятность пропуска цели ниже;
- вероятность ложной тревоги - вероятность выдачи сигнала наличия объекта при том, что объекта не было; обычно измеряется в значениях на единицу времени или в значениях на один анализируемый сигнал (объем информации). Система тем лучше, чем вероятность ложной тревоги ниже;
- временное разрешение - время обнаружения, прошедшее с момента возникновения объекта до момента его обнаружения. Система тем лучше, чем время обнаружения меньше;
- пространственное разрешение - точность определения координат обнаруженных объектов; если два объекта будут расположены рядом друг с другом, то на каком минимальном расстоянии они должны быть, чтобы система идентифицировала их как разные объекты. Система тем лучше, чем точность обнаружения выше, т.е. чем меньше ошибка определения координат.
Набор таких параметров может быть определен для каждой точки рассматриваемой территории и каждой конфигурации системы. Очевидно, что для фиксированной конфигурации системы (например, в ситуации, когда система уже развернута на местности) параметры, определенные для каждой из точек территории, будут различными. С другой стороны, в одной и той же точке местности определяемые параметры зависят от конфигурации системы, которая предполагается к развертыванию.
Поскольку под эффективностью работы системы подразумевается некоторое количество разнородных параметров, формализация понятия эффективности без принятия какого-либо механизма приведения видится крайне затруднительной. Для формализации понятий эффективности и оптимальности предлагается использовать обобщенный подход учета разнородных параметров через стоимостное выражение решения с соответствующими физическими характеристиками и потерь, допускаемых таким решением. Такой способ позволяет сделать свертку разнородных и часто противоречивых в математическом смысле физических параметров функционирования системы в естественный показатель эффективности.
Очевидно, что поскольку для каждой точки территории определен набор физических характеристик, можно определить эффективность функционирования системы в точке территории. Общая же эффективность системы для территории может быть оценена как суммарная или средняя эффективность для всех точек данной территории.
Существует несколько факторов, обуславливающих сложность решения данной задачи:
1) Сложность физики процесса обнаружения. На факт обнаружения влияет множество объективных факторов:
a. характеристики территории: рельеф, неоднородное покрытие территории лесом,
b. погодные условия, меняющиеся во времени для разных участков рассматриваемой территории,
c. условия установки видеокамер: высота подвеса, особенности установки (например, загораживание конструкцией вышки части территории),
d. влияние конкретных технических условий (ширина канала связи, особенности поворотной конструкции и объектива видеокамер, выбранные параметры функционирования камер и т.п.) на эффективность системы;
2) Организационная сложность. Определение степени влияния тех или иных факторов на эффективность требует большого количества статистических данных, которые часто не существуют в виде, готовом для учета в рамках рассматриваемой задачи, либо не существуют вообще ни в каком виде и должны быть собраны самостоятельно;
3) Техническая сложность задачи. Реализация алгоритма решения излагаемой задачи сложна технически, а сам алгоритм очень ресурсоемок по следующим причинам:
a. сложность вычисления упомянутых ранее физических параметров обнаружительной способности для точки территории. Вычисления сложны в смысле количества требуемых операций и учета большого количества данных;
b. размерность задачи, порождаемая размерами территории. Как было сказано, общая эффективность системы может быть оценена как средняя в некотором смысле эффективность по всем точкам территории. Для получения адекватной оценки количество учитываемых точек должно быть порядка 106, т.е. должно быть сделано порядка 106 вычислений по пункту 3а.
Наличие упомянутых факторов сложности заставляет разрабатывать упрощенные модели учета различных факторов, эффективные вычислительные процедуры [3], [4], в том числе с использованием суперкомпьютерных технологий и специального оборудования [5], что является отдельной сложной технической проблемой.
Рассмотрение задачи оценки эффективности конфигурации системы видеомониторинга леса проводится в нотации, определяющей блоки данных (входных, выходных, промежуточных) и обрабатывающие блоки, производящие вычисления над данными.
Во входных блоках данных размещается следующая структурированная информация.
Наиболее важным моментом является определение основных функций, необходимых для оценки эффективности, и зависимостей между такими функциями. Подробнее остановимся на примерах способов расчета таких функций, а также на источниках данных для статистических зависимостей. Важным фактором является вычислительная сложность указанных функций для реальных условий применения.
Наиболее сложными и принципиальными являются оценка вероятности обнаружения пожара системой и зависимость потерь, связанных с нетушением пожара, от времени его обнаружения.
1. Оценка вероятности обнаружения пожара
Пусть камера подвешена в точке с координатами х, y и высотой h, а точка, в которой нас интересует оценка вероятности обнаружить пожар, имеет координаты xf, yf (назовем ее точкой интереса). Для рассматриваемой точки интереса дан тип леса, определяющий скорость распространения пожара. Расстояние r между точкой интереса и точкой наблюдения может быть легко вычислено. Рельеф местности определяет оптическую видимость между этими двумя точками. Кроме того, в момент наблюдения заданы основные внешние параметры: прозрачность атмосферы (дальность видимости), скорость ветра, класс пожарной опасности. Предположим, что камера осматривает территорию вокруг себя с определенным углом обзора по горизонтали и в каждом направлении снимает в течение времени t.
На Фиг. 2 схематично представлена данная ситуация. Предположим, что пожар начинается в нулевой момент времени, и, поскольку даны условия распространения (тип насаждений, класс пожарной опасности, скорость ветра), на основе табличных данных может быть определено, как будет меняться площадь пожара от времени [8].
Важные предположения: время съемки каждой точки много меньше времени, за которое пожар значительно увеличивается в размерах, т.е. можно считать, что во время съемки в данном направлении пожар не меняет своего размера. За время между съемками одной точки (камера по заданным маршрутам обходит территорию и повторно снимает то же направление) не меняются внешние условия (прозрачность, скорость ветра и т.д.), но при этом считается, что каждый следующий осмотр - это событие, независимое в терминах обнаружительной способности системы от предыдущей съемки в том же направлении.
Для того, чтобы построить плотность вероятности обнаружить пожар от времени, нужно определить, как вероятность зависит от времени наблюдения за точкой интереса. При построении системы, направленной на автоматическое определение источника возгорания, эта зависимость также определяется характеристикой алгоритма автоматического обнаружения. Данную зависимость можно получить на основе статистических исследований, используя готовые видеоматериалы, содержащие изображения пожаров при определенных условиях, путем запуска в отношении них алгоритма автоматического обнаружения дыма. Поскольку накопление развитой базы видеоматериалов с различными характеристиками пожаров и условий обнаружения может быть проблемой в связи с редкостью природного пожара как явления, можно смоделировать, как будет выглядеть дым при определенных условиях на изображении и провести исследования используемого алгоритма автоматического обнаружения на моделируемых видеоматериалах.
Пример графика зависимости вероятности обнаружения пожара в точке территории от времени непрерывной съемки в данной позиции приведен на Фиг. 3. Еще раз уточним, что это есть зависимость вероятности обнаружения пожара для конкретной точки наблюдаемой территории от времени непрерывного наблюдения за этой точкой при условии, что пожар в этой точке присутствует и фиксированы параметры окружающей среды, размеры пожара, конкретное приближение камеры и конкретное местоположение пожара относительно камеры (в смысле рельефа и дальности).
Используя данную зависимость и предположение, что пожар возникает в случайные моменты времени, а так же предположение, что между соседними по времени осмотрами данной территории проходит столько времени, что обнаружение при повторном осмотре в статистическом смысле не зависит от обнаружения при первом, можно построить вероятность обнаружения пожара от времени с момента его возникновения (Фиг. 4). По оси абсцисс отложены времена, за которые камера делает 1, 2, 3 и т.д. оборотов или, другими словами, возвращается для повторного осмотра данной территории. Следует пояснить, что поскольку поворотная камера поочередно снимает позиции, заданные маршрутом, вероятность того, что камера к моменту времени Т на отрезке [0, T1] сняла именно точку (xf, yf), линейно зависит от Т, достигая 1 в момент T1. Действительно, поскольку T1 - время совершения полного цикла осмотра по маршрутам, вероятность того, что конкретная точка территории будет к этому моменту осмотрена, равна 1, так как к этому моменту будут сняты все точки территории интереса. Поскольку вероятность обнаружения пожара в точке является произведением вероятности осмотра точки за время Т на вероятность обнаружения пожара на отснятом материале, вероятность обнаружения пожара в момент времени T1 равна 1*Pr(t). Для выбранного на Фиг. 4 времени осмотра одной точки вероятность обнаружения к моменту T1 составит 0.5. К моменту времени Т2 территория будет осмотрена дважды, и это значит, что вероятность обнаружить пожар будет 1-(1-Pr(t))2. Между точками Ti и Ti+1 функция вероятности определена линейно. Продолжая процедуру в сторону увеличения времени, получим зависимость вероятности обнаружения пожара в точке территории от времени функционирования системы.
Для получения плотности вероятности обнаружить пожар в определенный момент времени с момента его возникновения необходимо численно взять производную от вероятности обнаружения по времени. Пример такой плотности вероятности представлен на Фиг. 5. Фактически это и есть искомая плотность вероятности обнаружить пожар от времени Wобн (см. формулу (4) ниже) для системы, которая состоит из одной камеры.
Приведенные выше рассуждения были сделаны исходя их предположения, что за время наблюдения размеры пожара не меняются. В реальной же обстановке период полного прохождения маршрута осмотра территории измеряется десятками минут или даже часами. С учетом того, что пожар может быть обнаружен на втором, третьем и т.д. проходе маршрута наблюдения, его размер к этому моменту может существенно увеличиться, что повысит вероятность его обнаружения. Зависимость площади пожара от времени может быть оценена на основе табличных данных, приводимых в различных методических пособиях (например, в [7]). Вероятность обнаружить пожар увеличивается с увеличением его площади, и, как следствие, видимого размера. Этот факт проиллюстрирован на Фиг. 6, где изображено семейство кривых вероятности обнаружения пожара в зависимости от времени съемки одной позиции маршрута для трех различных площадей пожара.
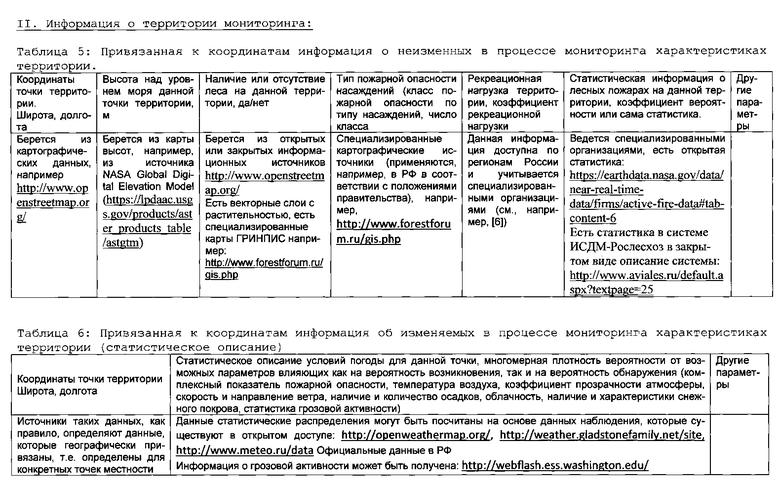
Пусть известна зависимость площади пожара от времени его горения S(T). Тогда, повторяя рассуждения для Фиг. 4, получим, что вероятность обнаружить пожар в момент времени Т1 равна Pr(t,S(T1)), в момент времени Т2 равна 1-(1-Pr(t,S(Т1))) (1-Pr(t,S(T2))) и т.д. Значения Р(Т) в точках, отличных от Ti могут быть вычислены по формуле (1), которая отражает тот факт, что вероятность обнаружить пожар зависит не только от обнаружительной способности алгоритма при выбранном времени съемки одной позиции t, но и от вероятности осмотреть точку интереса i раз к моменту времени Т. Плотность вероятности посмотреть в точку интереса i раз ко времени Т  равна 1/Т1 в промежутке от Ti-1 до Ti и 0 в других точках. Действительно, вероятность посмотреть в точку i раз в момент времени Ti-1 равна 0, в а момент Ti равна 1, возрастая между этими двумя точками линейно.
равна 1/Т1 в промежутке от Ti-1 до Ti и 0 в других точках. Действительно, вероятность посмотреть в точку i раз в момент времени Ti-1 равна 0, в а момент Ti равна 1, возрастая между этими двумя точками линейно.
Эти факты проиллюстрированы на Фиг. 7. Для ясности, на Фиг. 7 пунктирной линией приведена зависимость вероятности обнаружения без учета роста площади очага возгорания при некотором фиксированном его размере.
Рассмотрим более общий случай, когда данная точка территории видна сразу с нескольких камер. Приведем пример для двух камер, после чего поясним, как распространить приводимые рассуждения на любое количество видеокамер.
Пусть есть две точки видеомониторинга, каждая из которых имеет свою высоту, находится на своем расстоянии от точки наблюдения, каждая проводит мониторинг со своими параметрами (угол обзора, время наблюдения точки, параметры алгоритма), условия окружающей среды могут быть одинаковыми или разными. Тогда для каждой из точек будет своя вероятность обнаружить пожар от времени, соответственно P1(T) и Р2(Т), и вероятность обнаружить за время Т хотя бы с одной камеры будет определяться по следующей формуле:

Проведя дифференцирование этой функции, можно получить плотность вероятности обнаружить пожар хотя бы с одной видеокамеры от времени. Данный способ позволяет определять плотность вероятности от времени при наблюдении точки территории любым количеством точек видеомониторинга, исходя из соображения, что вероятность обнаружения хотя бы одной точкой видеомониторинга обратна вероятности необнаружения одновременно всеми точками видеомониторинга:

2. Расчет точности определения координат
Точность определения координат возгорания в точке интереса (xf, yf) с видеокамеры в точке (х, у) зависит от взаимного расположения точки интереса и камеры и не зависит от времени наблюдения. Точность определения координат может быть охарактеризована вероятностью определения в точке (xf, yf) координат пожара с ошибкой Е Рошибки(Е) с условием, что точка была просмотрена и в ней был пожар. Однако, если учесть данные на Фиг. 7, то вероятность обнаружить пожар, при условии, что он был в точке интереса, равна произведению вероятности реализации ошибки Е на вероятность обнаружить в этой точке пожар ко времени Т:

При этом для двух камер функция реализации ошибки должна выглядеть следующим образом:

где  - вероятность реализации ошибки Е для i-той камеры при обнаружении пожара i-той камеры;
- вероятность реализации ошибки Е для i-той камеры при обнаружении пожара i-той камеры;  - вероятность обнаружения i-той камерой в момент времени Т.
- вероятность обнаружения i-той камерой в момент времени Т.
Рассуждения, относящиеся к формуле (4), можно распространить на сколь угодно большое количество видеокамер. Из полученной записи плотности вероятности очевидным способом получается плотность вероятности реализации ошибки Е в момент времени Т для конкретной точки территории 
3. Зависимость потерь, связанных с нетушением пожара, от времени его обнаружения
Зависимость должна включать компоненты ущерба, связанные с продолжительностью нетушения пожара (в том числе, связанные со временем обнаружения, точностью определения местоположения пожара, стоимостью тушения (например, в соответствии с [9]) и т.д.).
Очевидным является предположение, что ущерб зависит от площади пожара, которая, в свою очередь, увеличивается от времени, т.е. чем большую площадь "прошел" пожар, тем больше должен быть ущерб. После определения зависимости ущерба, наносимого пожаром, от площади и зная, как меняется площадь от времени, может быть оценена зависимость стоимости тушения от времени. В данной зависимости также может быть учтено то, что время, требуемое для того, чтобы доехать до каждой точки территории, будет разным, т.е. добавится еще компонента, определяющая прибавку во времени нетушения пожара в зависимости от места его возникновения.
В конечном счете, ущерб зависит от того, какова стала площадь пожара к моменту начала тушения, которая, в свою очередь, зависит от того, в какое время после начала горения пожар был обнаружен и какова была точность определения координат. Простая интерпретация зависимости площади пожара от точности определения координат заключается в том, что при неточном определении пожарной бригаде придется осуществлять поиск пожара на местности, на что уйдет время, зависящее от ошибки определения координат, и за это время пожар увеличится в размерах. Эти рассуждения выражены следующей формулой:

где C(S) - зависимость ущерба, нанесенного пожаром от его площади, S(T) - зависимость площади пожара от времени, tнахождения (E) - зависимость времени нахождения пожара бригадой в зависимости от ошибки обнаружения Е.
В таком случае, оценкой среднего ущерба, допущенного системой обнаружения в точке интереса F при конкретных характеристиках окружающей среды К и при условии, что в данной точке был пожар, будет

Таким образом, полная запись оценки среднего ущерба для всей территории при заданной плотности вероятности возникновения определенных условий окружающей среды Wокр и вероятности возникновения пожара в точке F при условиях окружающей среды К Wпожаpa(F,K) будет такой:

Следует отметить, что Рпожара нормирована по времени, т.е. имеет смысловое значение "вероятность возникновения пожара за определенный период времени". Поэтому оценка среднего ущерба нормирована по времени в том же смысле, т.е. имеет смысл "средний ущерб, допущенный системой обнаружения, за период времени".
Кроме того, следует рассмотреть еще ряд критериев, которые могут использоваться для оценки эффективности системы видеомониторинга леса.
Средняя вероятность обнаружения пожара за время Т:

Среднее время с вероятностью Р обнаружить пожар:

Средняя вероятность обнаружить за время Т пожар с ошибкой не больше Е:

Отметим, что формула (10) позволяет отвечать на вопросы следующего характера:
1) Какова средняя вероятность за время Т обнаружить пожар с точностью Е;
2) При построении обратной функции по Т: каково среднее время, затраченное на обнаружение пожара с заданной точностью и вероятностью не менее заданной величины;
3) При построении обратной функции по Е: при заданной вероятности с какой точностью можно определить координаты возгорания за время Т.
Здесь целесообразно сделать замечание по поводу учета далеких вышек. Очевидно, что точность определения координат с одной камеры и, как следствие, вклад в точность определения координат при обнаружении с нескольких камер, убывает по мере увеличения расстояния между камерой и точкой интереса. Кроме того, при увеличении расстояния вероятность обнаружения также снижается. Эти факты позволяют утверждать, что при достижении некоторого порога расстояния между камерой и точкой интереса вклад камеры в обнаружительные характеристики системы для конкретной точки территории становится пренебрежимо малым. Это означает, что вычислительная сложность расчетных процедур при оценке обнаружительных характеристик системы может быть снижена путем исключения из рассмотрения камер, находящихся дальше заданного порога от точки интереса.
4. Расчет экономической эффективности внедрения системы обнаружения пожара
Введем понятие полного ущерба при эксплуатации системы обнаружения. Полный ущерб складывается из:
1. среднего ущерба 
2. разовых затрат на разворачивание системы Сразворачивание,
3. эксплуатационных затрат Сэксплуатации: аренды площадок размещения оборудования, каналов связи, обслуживания системы за рассматриваемый период времени,
4. затрат на человеческие ресурсы (операторов системы) Соператоры.
Экономическую эффективность внедрения можно рассчитывать как разницу между потенциальным полным ущербом (пункты 1-4) после внедрения системы и потенциальным полным ущербом (пункты 1, 3, 4) при невнедрении за интересующий период времени. Такой подход учитывает сценарии, когда существующая система обнаружения заменяется на более новую либо система видеомониторинга внедряется на территории, где ранее отсутствовала какая-либо иная система обнаружения. Так, оценка полного ущерба существующей системы складывается из пунктов 1, 3, 4, а при отсутствии системы - только из пункта 1. В таком случае подход, определяемый формулой (6), может быть также применен с необходимым уточнением, что плотность вероятности обнаружить пожар представляет собой дельта-функцию с "пиком" в месте, определяющем максимальный урон от пожара, а плотность вероятности реализации точности определения координат Е - дельта-функция с пиком, соответствующим вероятности возникновения ошибки определения координат 0.
Сразворачивание должна быть посчитана исходя из определения стоимости используемого оборудования и его монтажа.
Соператоры должна быть посчитана исходя из средней стоимости работы оператора в данной местности и количества операторов, необходимого для обслуживания системы с учетом сменности. Необходимое количество операторов может быть оценено по следующей методике. Известно среднее число F фактов съемки камеры в единицу времени. В реальности это число составляет 1,5-2 факта в минуту. Известно количество камер в предполагаемой системе N. Очевидно, что вся система камер будет генерировать F×N экземпляров видеоматериала в единицу времени. Система автоматического обнаружения допускает вероятность ложного срабатывания Pfault, следовательно, среднее количество ложных срабатываний в единицу времени во всей системе будет F×N×Pfault. Это есть оценка среднего количества требующих принятия оператором решения видеоматериалов, генерируемых системой в единицу времени. Строго говоря, принятия решения требуют не только видеоматериалы, на которых алгоритм допустил ложное срабатывание, но и те, на которых алгоритм сработал верно, но число последних зависит от числа пожаров на местности за единицу времени и несоизмеримо мало по сравнению с числом ложных срабатываний, что позволяет пренебречь этим компонентом при оценке нагруженности оператора. Известно, что оператор в среднем способен принять решения по S видеоматериалам в единицу времени (типичный показатель 10-20 фактов в минуту). Отсюда минимально необходимое потребное количество операторов может быть оценено следующим образом:

где К>1 - коэффициент резерва, D - длительность смены одного оператора в часах.
Кроме того, оценка может учитывать, что в периоды пожарной опасности регламент мониторинга территории, помимо просмотров результатов деятельности автоматической системы, может включать непосредственный осмотр территории человеком. Для таких периодов оценка может быть пересмотрена следующим образом:

Вычисление затрат на операторов является очевидной процедурой при известном необходимом их числе и средней стоимости работника необходимой квалификации в данной местности.
Ниже со ссылкой на Фиг. 8 описан способ определения ущерба, допущенного системой видеомониторинга леса. Как видно, описываемый способ оценки эффективности системы состоит из четырех блоков.
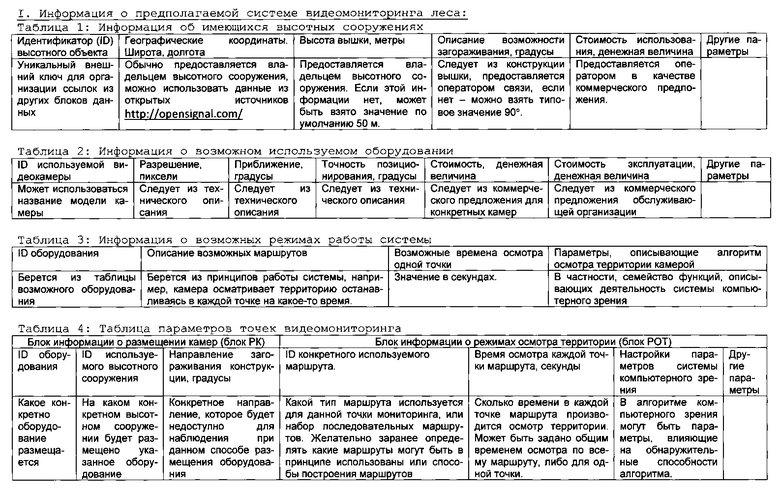
Блок {1}, на основе статистической обработки архивных данных о погоде в данной территории (Таблица 6 (Т6)), вычисляет прогнозную вероятность возникновения пожара на данной территории за рассматриваемый период времени Рпожара и плотности вероятности реализации конкретных условий окружающей среды Wокр(K). Следует отметить, что прогнозная вероятность возникновения пожара может быть оценена как на основе архивных данных о пожарах на территории в пожароопасные сезоны, так и с использованием различных методик прогноза вероятности возникновения пожара на основе предполагаемых классов пожарной опасности с учетом возможной погодной обстановки на территории.
Блок {2} строит функцию С(Т,Е) оценки зависимости ущерба, нанесенного пожаром, от времени нетушения пожара и ошибки определения его координат (см. формулу (5)). Зависимость строится на основе:
1) данных о зависимости площади пожара от времени (другими словами, данных о скорости распространения пожара для леса на конкретной территории),
2) данных о стоимости леса на единицу площади лесного покрова,
3) данных о времени нахождения очага возгорания силами тушения при определенной допущенной системой ошибке обнаружения координат возгорания.
Блок {3}, на основе данных из Таблиц 1-6 (Т1-Т6), в соответствии с подходами, описанными выше в разделах 1, 2, и с использованием формул (1), (3), строит процедуру вычисления следующих фундаментальных обнаружительных характеристик системы для каждой точки исследуемой территории:
1) плотность вероятности обнаружить пожар за определенное время Т в данной точке интереса F при реализации конкретных погодных условий К;
2) плотность вероятности допустить ошибку определения координат Е при наблюдении очага в точке интереса F в течение времени Т.
Блок {4}, в соответствии с подходами, описанными выше в разделах 3, 4 строит серию оценочных критериев для системы, таких как:
1) полный ущерб, допущенный системой, который включает не только ущерб, связанный с потерей леса, но и стоимость разворачивания и обслуживания самой системы;
2) вероятностные, точностные и временные характеристики системы, включая среднюю вероятность обнаружения пожара за время Т, среднее время с вероятностью Р обнаружить пожар, среднюю вероятность обнаружения пожара за время Т с ошибкой не больше Е.
Далее описывается способ оптимального размещения системы видеомониторинга леса для раннего обнаружения пожаров.
Очевидным является факт, что системы видеомониторинга леса с разными конфигурациями обеспечивают разные обнаружительные характеристики и, как следствие, разную величину полного ущерба для рассматриваемой территории. Поэтому, при подготовке к развертыванию важным является не столько априорная оценка характеристик системы на местности, сколько выбор оптимальной конфигурации, которая бы удовлетворяла всем наложенным на систему ограничениям и имела оптимальные оценки по выбранным критериям.
Для описания способа выбора оптимальной конфигурации системы перечислим варьируемые параметры, варианты ограничений и критериев.
Варьируемые параметры
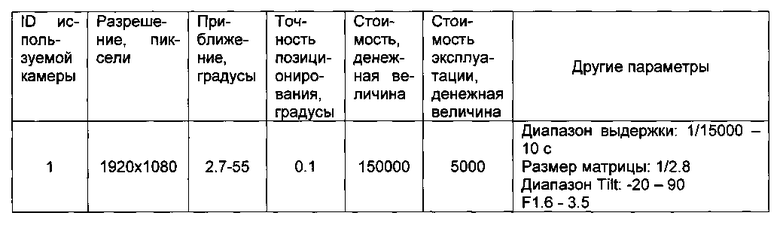
В качестве варьируемых параметров выступают данные, приведенные в Таблице 4, а именно:
- места расположения видеокамер (могут выбираться из заранее заданного списка, либо произвольно);
- типы оборудования;
- конфигурации маршрутов осмотра;
- настройки системы автоматического обнаружения;
- другие параметры конфигурации системы (такие как, ширина каналов связи, объемы архивов данных, настройки видеокамер и т.п.).
Налагаемые ограничения
В общем случае, любые из параметров либо промежуточных величин, как и их деривативы (всевозможные средние значения по времени и территории, максимальные и минимальные величины и др.) могут быть использованы для ограничения конфигурации рассматриваемой системы видеомониторинга леса. Наиболее часто используемые варианты:
- обеспечение вероятностей обнаружения не ниже заданных на всей территории или ее части (например, в части особо важных лесных массивов);
- обеспечение средних времен обнаружения не ниже заданных на всей территории или ее части;
- построение системы с разовыми либо эксплуатационными затратами не выше заданных;
- построение системы с задействованием количества вышек не более заданного.
Критерии оценки
В общем случае, любые из параметров либо промежуточных величин, как и их деривативы могут являться критериями, которые также в настоящей заявке именуются показателями эффективности.
Наиболее часто используемыми являются:
1. полный ущерб, допущенный системой;
2. площадь территории с вероятностью и точностью обнаружить пожар не ниже заданного порога;
3. площадь территории со средним временем обнаружения не более заданного порога;
4. разовые затраты;
5. эксплуатационные затраты;
6. нормированные свертки показателей по пп. 1-5, либо многокритериальные оценки с предпочтениями по критериям.
Говоря о способе выбора оптимальной конфигурации, прежде всего следует отметить следующее.
Задача оптимизации значения функции неизвестного вида NP - трудна (см. [2], [4]). Оценка свойств функций, представляющих собой критерии работы системы видеомониторинга, видится крайне затруднительной. В таких обстоятельствах технически более простым решением видится использование выбранных критериев в качестве функций неизвестного вида и применение алгоритмов нахождения псевдооптимального решения задачи оптимизации. Способ выбора оптимальной конфигурации сводится к направленному сокращенному перебору возможных конфигураций системы на местности и выбору оптимальной с точки зрения выбранных критериев конфигурации, удовлетворяющей поставленным ограничениям.
Согласно предпочтительному варианту осуществления настоящего изобретения, алгоритм поиска оптимальной конфигурации представляет собой гибридный эволюционно-генетический алгоритм (см. [3]) (см. Фиг. 9).
Как нетрудно заметить, варьируемые (или контролируемые) параметры (Таблица 4) могут носить дискретный (места расположения и типы оборудования), либо непрерывный или условно-непрерывный характер (остальные параметры). Блок дискретных параметров является основой для представления кодировки (генотипа) особей генетического алгоритма (ГА). Фактически, кодировка представляет собой 2k-ичную строку G длины N, где k - количество типов оборудования (оборудование пронумеровано от 1 до k включительно), N - количество потенциальных мест установки оборудования. Таким образом, значение i-ого символа строки G(i) определяет, какой тип оборудования должен быть установлен на i-той вышке, если G(i) не равно 0. G(i) равное 0 интерпретируется как отсутствие оборудования на i-той вышке. Значение G(i) равное - j означает установку на i-тую вышку двух экземпляров оборудования j, так чтобы зоны, загораживаемые конструкцией вышки, не перекрывались; такая система создает точку видеомониторинга с обзором в 360°. Таким образом, любая строка, удовлетворяющая описанным ограничениям, определяет места и типы установки оборудования на территории. Вторым элементом кодировки является набор связанных с каждым символом строки (т.е. с каждой предполагаемой к установке видеокамерой) непрерывных параметров осмотра территории.
Пусть к установке на территории планируется один тип видеокамер. Тогда Таблица 2, приведенная выше, будет иметь следующий вид:
Определены места расстановки вышек, пригодных для установки видеокамер. Ниже дан пример вышеприведенной Таблицы 1, определяющей места расстановки вышек:
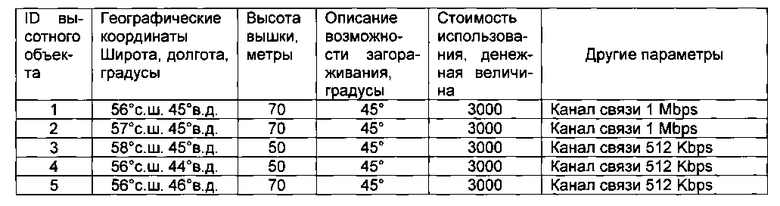
В таком случае, примером кодировки G могут служить следующие строки:
(0,0,0,0,0) - ни на одну вышку не установлено оборудование;
(1,1,1,1,1) - на всех вышках установлен один экземпляр оборудования;
(1,1,-1,1,1) - на третьей вышке установлено две видеокамеры, так что их зоны загораживания не перекрываются, на остальных вышках установлен один экземпляр оборудования.
Кроме того, с каждой позицией строки G ассоциирован набор параметров системы, связанных с соответствующей точкой видеомониторинга. Такой набор может включать следующие параметры:
- опорные точки маршрутов осмотра территории (набор значений (Р, Т, Z), где Р и Т - углы азимута и склонения в сферической системе координат с центром в месте расположения камеры, плоскость экватора которой расположена параллельно плоскости геометрического горизонта, а положению нулевого азимута соответствует направление на север, Z - приближение камеры (или связанные величины, такие как фокусное расстояние и углы поля зрения камеры)), тип снимаемого материала (видео, изображения), время съемки одной позиции, параметры съемки (разрешение, параметры фокусировки, выдержки, диафрагмы, скорость съемки (количество кадров в секунду), другие параметры, специфичные для устанавливаемого оборудования, такие как баланс белого, усиление, инфракрасный (IR) фильтр, параметры постобработки изображения и др.), параметры системы компьютерного зрения (пороги на чувствительность, параметры накопления, кластеризации, выделения объектов);
- положение видеокамеры на вышке.
Показанные на Фиг. 9 операторы ГА генерации начальной популяции, кроссовера и мутации хорошо известны из классической литературы по эволюционно-генетическим алгоритмам (см., например, [3]). При решении рассматриваемых задач хорошо показали себя одноточечные операторы кроссовера и мутации.
При применении кроссовера потомки наследуют не только код генотипа, но и связанные с каждой наследуемой позицией генотипа параметры. При этом, в терминах моделируемой системы такое наследование означает, что каждое из вновь синтезируемых решений наследует часть признаков одного родителя, часть - другого. Другими словами, в решении-потомке конфигурации отдельных точек мониторинга будут взяты из одного родителя, другие - из другого. Если потомок унаследовал "хорошие" части родительских решений, он получает шансы "выжить" в ходе дальнейшей эволюции и "породить" еще более качественные решения. В рассматриваемом предпочтительном алгоритме применяются два вида кроссоверов: одноточечный и равномерный.
Мутация подразумевает изменение единичного гена с подбором допустимого набора связанных параметров. В терминах моделируемой системы это означает "сброс" конфигурации одной точки видеомониторинга с последующей попыткой установить на вышку случайный тип оборудования с допустимыми для него режимами эксплуатации.
Оператор оценки реализован в соответствии с методикой, проиллюстрированной со ссылкой на Фиг. 8, и позволяет выбрать критерий из числа определенных методикой оценки либо комбинацию таких критериев.
Оператор генетического взрыва следит за генетическим разнообразием популяции. В случае падения разнообразия ниже заранее заданного порога, данный оператор производит инъекцию нового генетического материала с целью предотвращения преждевременной сходимости алгоритма к локальному оптимуму, далекому от глобального.
Отбор представляет собой схему предпочтительного ранжирования с исключением из популяции особей из конца списка предпочтений. При этом популяция делится на группы по количеству используемых видеокамер, из каждой группы удаляются решения, для которых нашлись другие решения, такие что значения критериев для них лучше, но количество используемых камер меньше. Оставшиеся особи упорядочиваются по ухудшению значения критериев. Затем производится отбрасывание по одной особи из хвоста каждой группы до тех пор, пока не будет достигнуто целевое количество особей в популяции.
В качестве условия останова предпочтительно, но не исключительно, используется ограничение по количеству обработанных поколений популяции.
Таким образом, генетический алгоритм - это механизм исследования подпространства пространства параметров, связанного с дискретными вариативами.
С каждой из выбранных схем размещения связан набор оптимальных непрерывных параметров. Оптимизация в подпространстве непрерывных параметров при зафиксированной конфигурации дискретных параметров осуществляется блоком локальной адаптации особей при помощи статистического алгоритма поиска глобального оптимума. Возможные варианты реализации такой оптимизации широко известны в технике (см., например, [10]).
При этом, как было сказано ранее, в качестве критерия используется непосредственно критерий, выбранный в качестве показателя эффективности системы, если он единственный, либо свертка критериев с коэффициентами, характеризующими важность каждого отдельного критерия.
В процессе локальной адаптации используется одна из двух стратегий применения алгоритма поиска глобального оптимума: глобальная и локальная. Глобальная стратегия подразумевает, что вектор управляемых параметров представляет собой объединение векторов параметров, связанных с каждой позицией перестановки. Таким образом, алгоритм поиска глобального оптимума работает сразу со всеми непрерывными и условно-непрерывными параметрами точек видеонаблюдения в рамках рассматриваемой особи генетического алгоритма. При применении локальной стратегии, в качестве вектора контролируемых параметров используется вектор непрерывных и условно-непрерывных параметров, связанных с одной точкой видеомониторинга. Алгоритм глобального поиска оптимума в этом случае запускается для каждой точки видеомониторинга последовательно и циклически до тех пор, пока "проход" по всем точкам видеомониторинга приводит к улучшению критериев эффективности. Глобальная стратегия обладает существенно большей вычислительной трудоемкостью, но потенциально обеспечивает более высокое качество локальной адаптации.
Таким образом, после окончания работы блока локальной адаптации, популяция представляет собой набор различных вариантов размещения оборудования на местности, для каждого из которых найден оптимальный набор непрерывных и условно-непрерывных параметров конфигурации системы мониторинга.
Для простоты изложения, но без потери общности, предположим, что набор непрерывных параметров для каждой точки мониторинга состоит из одного параметра - места размещения видеокамеры на вышке А (изменение места размещения приводит к изменению положения слепой зоны, обеспечиваемой загораживанием поля обзора видеокамеры элементами конструкции вышки). Тогда при использовании глобального подхода вектор варьируемых параметров для рассматриваемого примера будет иметь вид (A1, А2, А3, А4, А5), где Ai - размещение камеры на i-той вышке. При использовании локального подхода статистический алгоритм будет поочередно запускаться над одномерными векторами (A1), (А2), (А3), (А4), (А5), (A1), (А2), (А3), (А4), (А5) и т.д. до тех пор, пока происходит улучшение эффективности текущего решения.
Ниже со ссылкой на Фиг. 10 описывается отвечающий настоящему изобретению способ 1000 определения оптимальной конфигурации системы видеомониторинга леса, пример которой показан на Фиг. 1. Рассматриваемая здесь система видеомониторинга леса может быть планируемой для развертывания.
На этапе 1010 собирают множество параметров, относящихся к характеристикам точек видеомониторинга и характеристикам территории размещения точек видеомониторинга. Подробный пример таких параметров самих по себе и путей их получения приведен выше в Таблицах 1-6. Как было сказано ранее, среди указанных параметров имеются параметры, которые являются контролируемыми (или варьируемыми). Примеры контролируемых параметров также даны выше.
На этапе 1020 задают один или более показателей эффективности системы видеомониторинга леса (т.е. критериев) в соответствии с подходами, раскрытыми выше в разделах 1-4.
На этапе 1030 выполняют перебор вариантов размещения точек видеомониторинга по множеству возможных позиций на территории. Данный перебор отвечает подходу к решению задачи оптимизации, описанному выше. Для этого, итерационным образом выполняется установление конкретного размещения точек видеомониторинга системы на местности и, для установленного размещения точек видеомониторинга, определение такого оптимального набора параметров, который оптимизирует потребный показатель эффективности из показателей эффективности системы видеомониторинга леса, заданных на этапе 1020. При выполнении указанных итераций, потребный показатель эффективности вычисляется с варьированием соответствующих ему контролируемых параметров по итерациям. Как было сказано ранее, потребный показатель эффективности может представлять собой свертку различных показателей эффективности с коэффициентами, характеризующими важность каждого отдельного показателя эффективности.
Согласно предпочтительному варианту осуществления, перебор вариантов размещения точек видеомониторинга на этапе 1030 прекращается по выполнению заранее заданного условия завершения. Таким условием завершения может быть, например, одно из следующего:
- устойчивое отсутствие улучшения потребного показателя эффективности по ходу выполнения итераций перебора;
- исчерпание временной квоты, выделенной на выполнение перебора;
- достижение заранее определенного количества итераций.
Предпочтительно, при выполнении перебора для последующих итераций из рассмотрения исключаются точки видеомониторинга, изменение позиции и/или характеристик которых не оказывает существенного влияния на выполняемую оптимизацию, что позволяет динамически сокращать варианты перебора.
На этапе 1040 определяют оптимальную конфигурацию системы видеомониторинга леса. Для этого, полученные размещения точек видеомониторинга, для которых на этапе 1030 определены оптимальные наборы параметров, сравниваются между собой и выбирается тот вариант размещения, которому соответствует наилучшее значение показателя эффективности.
Согласно предпочтительному варианту осуществления, на потребный показатель эффективности может быть наложено ограничение или ряд ограничений, пример которых приведен выше в разделе 4. Это делается, в частности, для исключения из сравнения по этапу 1040 тех вариантов размещения точек видеомониторинга, для которых показатель эффективности не удовлетворяет наложенным на него ограничениям.
Реализация описанного выше способа 1000 может быть осуществлена путем соответственного конфигурирования/программирования компьютера или другой подобной машины. Конфигурирование компьютера для выполнения им функций согласно настоящему изобретению, описанных выше, может быть осуществлено путем инсталляции на него специализированного программного обеспечения, которое при его исполнении предписывает компьютеру выполнять соответствующие функции. Это может быть самостоятельно разработанное программное обеспечение, в том числе с использованием коммерчески и обще доступных сред программирования, библиотек, API и пакетов, заказное программное обеспечение или комбинация вышеперечисленного.
При этом, низкоуровневые аспекты такого компьютера, включая аппаратные средства и базовое программное/программно-аппаратное обеспечение, являются широко известными.
Примером результатов применения предложенных методик оптимизации могут служить графики зависимости обеспечения территории интереса (Фиг. 11) вероятностью обнаружения не ниже заданной (критерий обозначен как "Общее покрытие") и точностью обнаружения не ниже заданной (критерий обозначен как "Территория с большей точностью") от количества устанавливаемых видеокамер (Фиг. 12).
Графики типа "… до оптимизации" представляют значение упомянутых критериев при неоптимальном выборе местоположения точек видеомониторинга (например, на основе визуальной расстановки). Графики типа "… после оптимизации" представляют значения тех же критериев для конфигураций с заданным числом точек видеомониторинга, но выбранных на основе предложенного способа оптимизации. Значения критериев определены для всего диапазона значений количества точек видеомониторинга к установке. Так, например, при неоптимально расставленных 42-ух точках видеомониторинга площадь с вероятностью обнаружения не ниже заданного порога составляет около 27% от общей площади интереса. При оптимальной расстановке тех же 42-ух точек видеомониторинга покрытая площадь составит более 50%. Эти факты проиллюстрированы на Фиг. 13 и Фиг. 14. Иллюстрации позволяют визуально оценить обеспечиваемую разницу в площадях.
Далее описывается способ оптимальной настройки системы видеомониторинга леса под текущие условия окружающей среды.
Как видно из Таблицы 4, конфигурация системы на местности включает два основных блока:
- Блок информации о размещении камер (блок РК): места установки, тип оборудования, направление загораживания конструкции;
- Блок настроек режимов осмотра территории (блок РОТ): используемые маршруты, времена осмотра, настройки системы компьютерного зрения и прочее.
При построении оптимальной конфигурации системы блок оптимизации варьирует параметрами, входящими в оба блока, таким образом одновременно выбирая размещение видеокамер и их будущие режимы работы. При этом, в качестве исходных данных используются архивные данные об изменяющихся условиях на территории (без потери общности, будем говорить об архиве погодных данных). В предположении, что погодные условия на данной территории будут аналогичны архивным, характеристики системы после ее развертывания будут соответствовать таковым, рассчитанным для архивных данных.
Очевидно, что погодные условия в процессе эксплуатации системы видеомониторинга леса будут отличаться от средних значений, принятых при проектировании. Как следствие, реальные характеристики системы при этом будут также отличаться от расчетных (т.е. рассчитанных на основе архивных данных), как правило, в худшую сторону. С другой стороны, факт, что система развернута на местности, означает, что зафиксированы значения блока РК Таблицы 4, но данные блока РОТ можно изменять, настраивая режимы работы системы. Общий подход выбора оптимальной конфигурации системы может быть применен для настройки системы в процессе ее эксплуатации (вплоть до настройки в режиме реального времени) с принятием во внимание следующих фактов:
1) пространство варьируемых параметров сокращается до набора, определяемого блоком РОТ Таблицы 4;
2) вместо архивных данных о погоде используются текущие данные о погоде, что можно интерпретировать как использование архивных данных минимальной глубины;
3) нет смысла рассчитывать оценки ущерба, поскольку они имеют смысл "ущерб за определенный период времени", но сама процедура подстройки системы во время эксплуатации подразумевает вычисление моментальных оценок, соответствующих текущим условиям эксплуатации.
С учетом вышеперечисленных фактов, процедура оценки показателей эффективности системы по Фиг. 8 в рамках настройки может быть изменена способом, показанным на Фиг. 15.
При этом, процедура оптимизации естественным образом модифицируется за счет сокращения набора варьируемых параметров и организации непрерывной подстройки. Фактически, процедура оптимизации представляет собой реализацию блока локальной адаптации эволюционно-генетического алгоритма, описанного выше, работающую при фиксированном размещении точек видеомониторинга системы на местности.
Предполагается, что длительность процесса оптимизации меньше интервала существенного изменения условий окружающей среды. С другой стороны, получить оценку характеристик системы для текущих параметров настройки можно очень быстро. Учитывая, что используемый статистический алгоритм поиска оптимума имеет итерационный характер, от итерации к итерации улучшая имеющееся решение, можно планировать процесс поиска оптимальной конфигурации не по качеству решения, а по времени его поиска, останавливая процесс поиска по достижении заранее заданного лимита времени. Если найденные за отведенное время режимы работы обеспечивают лучшие значения критериев, чем текущие, они немедленно применяются. Такой процесс обеспечивает условно-оптимальную (а при наличии достаточных вычислительных мощностей гарантированную epsilon-оптимальную (см. [2])) настройку системы в зависимости от текущих условий окружающей среды.
Ниже со ссылкой на Фиг. 16 описывается способ 1600 оптимальной настройки системы 100 видеомониторинга леса согласно предпочтительному варианту осуществления настоящего изобретения. По сути, данный способ представляет собой адаптацию вышеописанного способа 1000 к уже развернутой и эксплуатируемой системе видеомониторинга леса.
На этапе 1610, аналогично этапу 1010, собирают множество параметров, относящихся к характеристикам точек видеомониторинга и характеристикам территории размещения точек видеомониторинга. Опять же, некоторые из параметров являются контролируемыми;
На этапе 1620, аналогично этапу 1020, задают показатель эффективности системы видеомониторинга леса.
На этапе 1630, аналогично этапу 1030, итерационным образом выполняется определение такого оптимального набора параметров, который оптимизирует показатель эффективности, заданный на этапе 1620. При выполнении итераций, показатель эффективности вычисляется с варьированием контролируемых параметров по итерациям. Как было сказано выше, определение оптимального набора параметров может завершаться по истечении заранее заданного времени.
Наконец, на этапе 1640, выполняют корректировку контролируемых параметров системы видеомониторинга леса до оптимального набора параметров. Корректировка может выполняться фактически непрерывным образом, а может выполняться только при условии того, что полученный оптимальный набор параметров обеспечивает значительное улучшение работы системы видеомониторинга леса в плане рассматриваемого показателя эффективности, например, на величину, не меньшую заранее заданного порога.
Описанный способ 1600 может быть реализован компьютерным образом, по сути, аналогично тому, что указано выше в отношении способа 1000, специализированным модулем настройки в составе системы 100 видеомониторинга леса. Согласно предпочтительному варианту осуществления, модуль настройки может быть реализован в виде программного обеспечения, исполняющегося на сервере 140 или на одном или более из терминальных компьютеров 120 рабочих мест операторов. В то же время, модуль настройки может быть реализован и как отдельный компьютерный аппаратный компонент системы 100, подключенный к сети 130 для взаимодействия с другими ее компонентами и сконфигурированный известным образом для выполнения соответствующих этапов способа 1600. При этом, непосредственная реализация оптимальной подстройки системы согласно настоящему изобретению путем соответственного удаленного изменения параметров оборудования относится к широко известным аспектам эксплуатации такого рода систем видеонаблюдения, вкратце отмеченным выше.
Параметры, приведенные в Таблицах 1-6, могут храниться в отдельном или распределенном сетевом хранилище данных, и в составе системы 100, и внешним по отношению к ней образом, и в виде комбинации этих двух вариантов. В случае реализации модуля настройки на сервере 140, указанные параметры могут храниться, по меньшей мере частично, на запоминающем устройстве из состава сервера 140. В случае же реализации модуля настройки на операторском терминале 120, параметры могут храниться, по меньшей мере частично, на запоминающем устройстве из состава терминала 120. В случае реализации модуля настройки в виде обособленного компьютерного устройства в системе 100, указанные параметры могут храниться, по меньшей мере частично, на запоминающем устройстве из состава этого компьютерного устройства. Помимо этого, некоторые из параметров могут извлекаться из внешних источников данных в режиме онлайн. Рассматриваемый в данном абзаце аспект должен быть очевидным для специалиста и поэтому дополнительно не обсуждается.
Изобретение было раскрыто выше со ссылкой на конкретные варианты его осуществления. В рамках существа вышеприведенного раскрытия, для специалистов могут быть очевидны и иные варианты осуществления изобретения, отличающиеся от тех, что изложены в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения и ее эквивалентами.
Список процитированных источников
[1] Черняк B.C. "Многопозиционная радиолокация", М.: Радио и связь, 1993 г.
[2] Гэри М., Джонсон Д. "Вычислительные машины и труднорешаемые задачи", М.: Мир, 1982 г.
[3] Батищев Д.И. "Генетические алгоритмы решения экстремальных задач", Учебное пособие, под ред. Львовича Я.Е., Воронеж, 1995 г., 64 с.
[4] Пападимитриу X., Стайглиц К. "Комбинаторная оптимизация: Алгоритмы и сложность", М.: Мир, 1985 г.
[5] Kate Gregory, Ade Miller "Accelerated Massive Parallelism with Microsoft® Visual С++", Microsoft Press, 2012
[6] Постановление Правительства РФ №838 от 29 декабря 2006 г. "Об утверждении методики распределения между субъектами Российской Федерации субвенций из федерального фонда компенсаций для осуществления отдельных полномочий Российской Федерации в области лесных отношений, реализация которых передана органам государственной власти субъектов Российской Федерации"
[7] Методические рекомендации министерства природных ресурсов РФ, Справочник по тушению природных пожаров, проект ПРООН/МКИ "Расширение сети ООПТ для сохранения Алтая-Саянского экорегиона", Красноярск, 2011 г.
[8] Приказ №287 Рослесхоза от 5 июля 2011 г. "Об утверждении классификации природной пожарной опасности лесов и классификации пожарной опасности в лесах в зависимости от условий погоды"
[9] Приказ №53 Рослесхоза от 3 апреля 1998 г.
[10] Стронгин Р.Г. "Численные методы в многоэкстремальных задачах. Оптимизация и исследование операций", Главная редакция физико-математической литературы издательства "Наука", Москва, 1978, 240 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2504014C1 |
| РАСПРЕДЕЛЕННАЯ АРХИТЕКТУРА СИСТЕМЫ ВИДЕОМОНИТОРИНГА ЛЕСА | 2013 |
|
RU2554102C2 |
| СИСТЕМА И СПОСОБ ВИДЕОМОНИТОРИНГА ЛЕСА | 2011 |
|
RU2458407C1 |
| КОМПЛЕКСНАЯ СИСТЕМА МОНИТОРИНГА ПРИРОДНЫХ ПОЖАРОВ | 2020 |
|
RU2747667C1 |
| СПОСОБ ПОЛУЧЕНИЯ ФОТО- ИЛИ ВИДЕОИЗОБРАЖЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ОБЪЕКТА СЪЕМКИ | 2015 |
|
RU2671551C2 |
| СПОСОБ И СИСТЕМА МОНИТОРИНГА ТЕРРИТОРИИ С ПОМОЩЬЮ УПРАВЛЯЕМОЙ ВИДЕОКАМЕРЫ | 2016 |
|
RU2636745C1 |
| СИСТЕМА МОНИТОРИНГА ЛЕСНЫХ МАССИВОВ | 2013 |
|
RU2574898C2 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ, ПОСТРОЕННАЯ НА ПРИНЦИПЕ РАЗНОСЕНСОРНОГО ПАНОРАМНОГО ОБЗОРА МЕСТНОСТИ С ФУНКЦИЕЙ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ОЧАГА ВОЗГОРАНИЯ | 2011 |
|
RU2486594C2 |
| СПОСОБ ВИДЕОНАБЛЮДЕНИЯ ОТКРЫТОГО ПРОСТРАНСТВА С КОНТРОЛЕМ ПОЖАРНОЙ ОПАСНОСТИ | 2013 |
|
RU2534827C2 |
| КОМПЛЕКС ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ОХРАНЯЕМОЙ ТЕРРИТОРИЕЙ | 2013 |
|
RU2542873C1 |
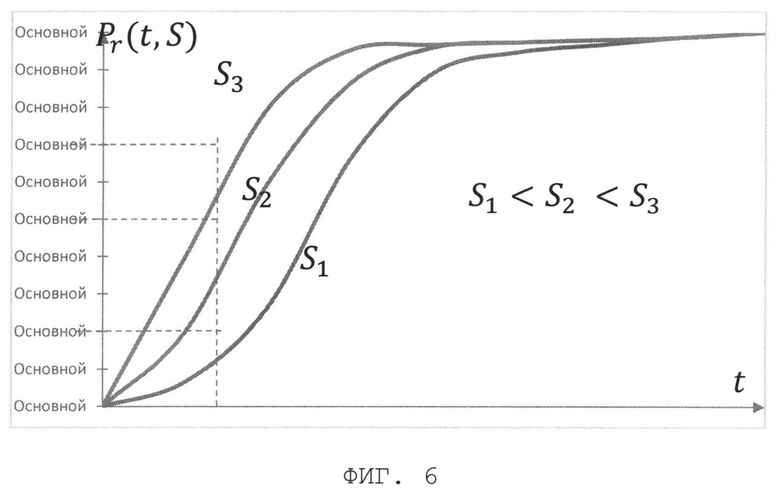
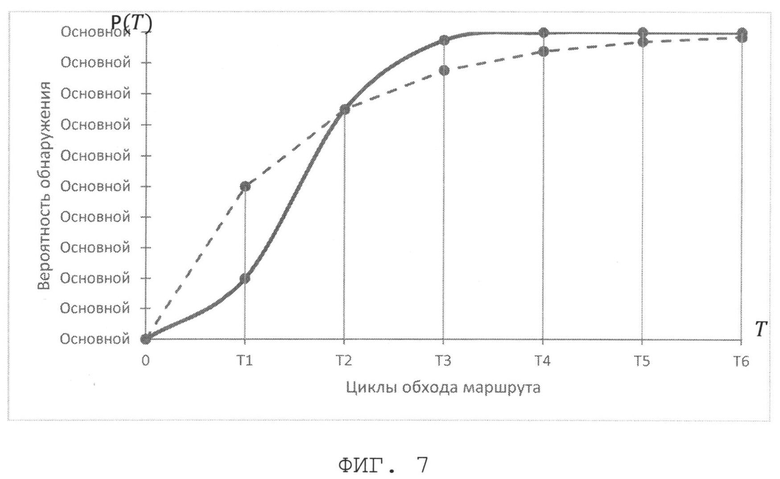
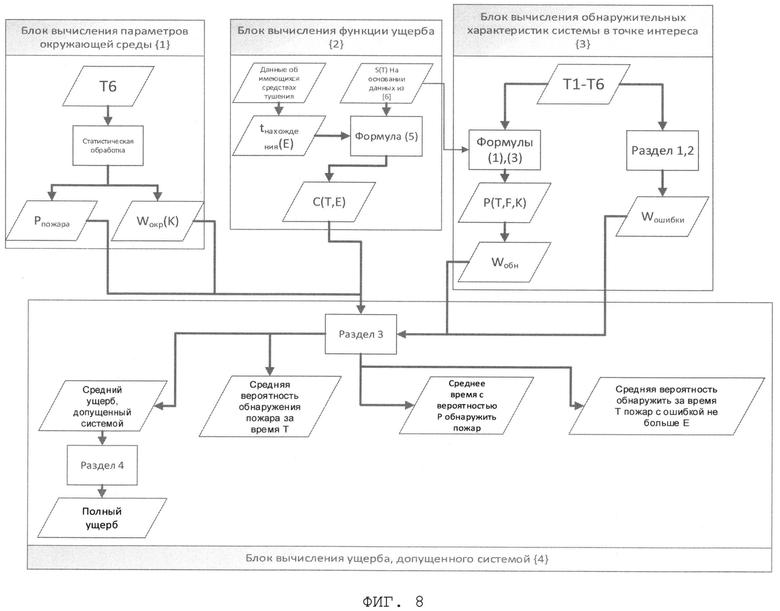
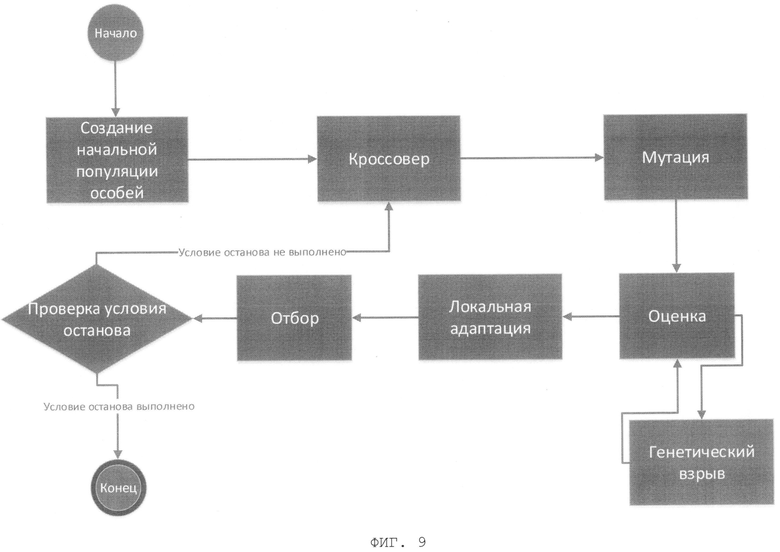
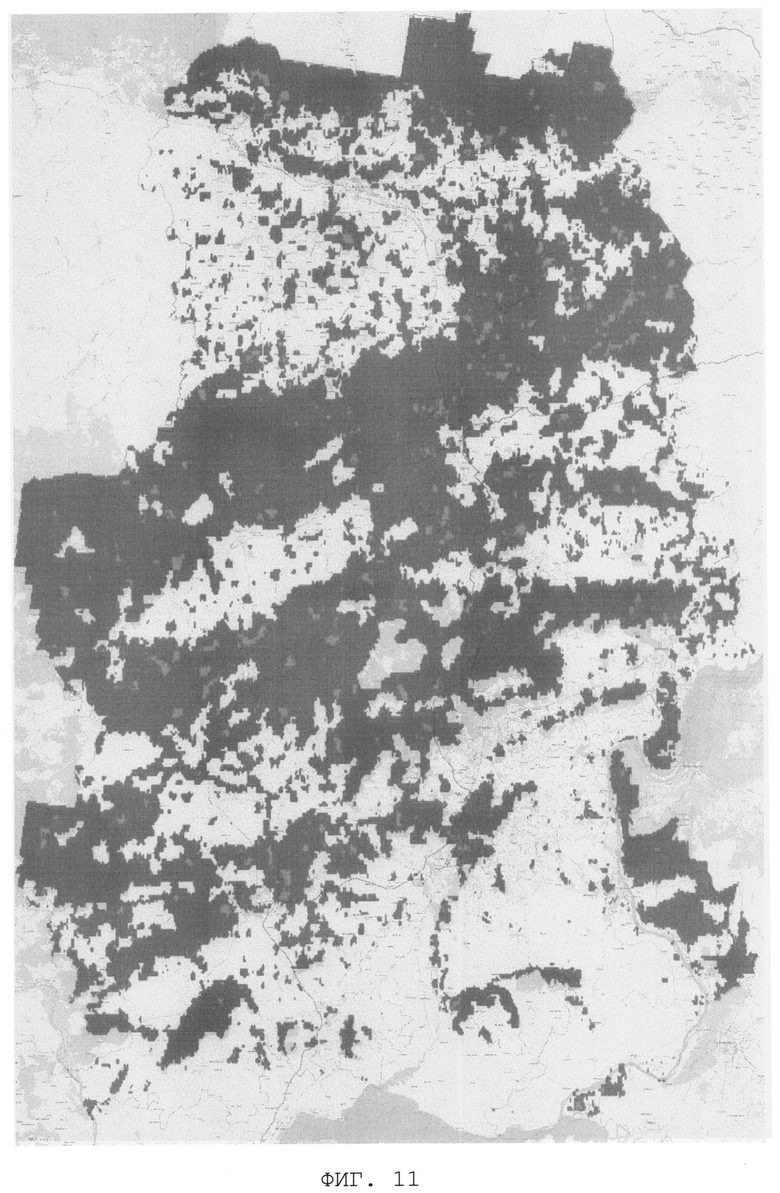
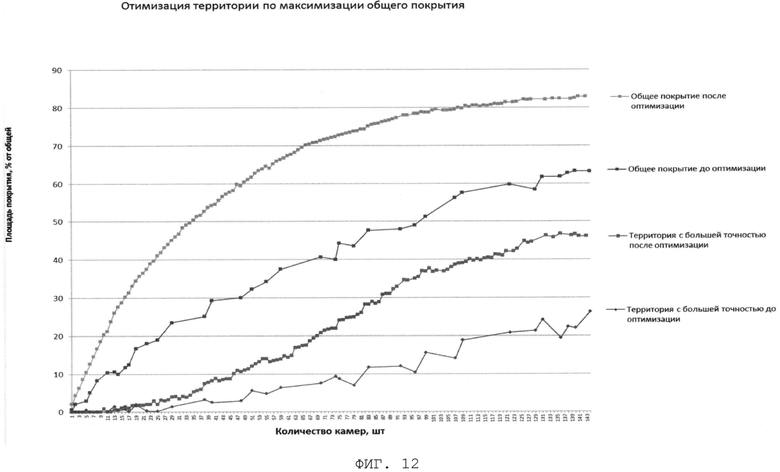
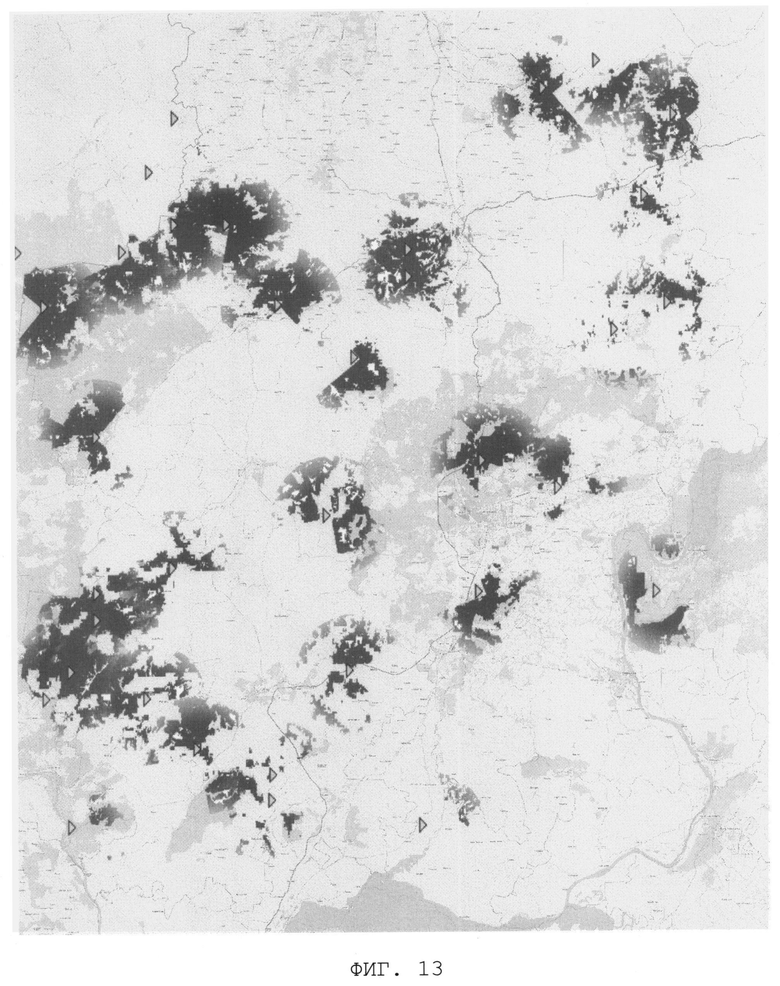

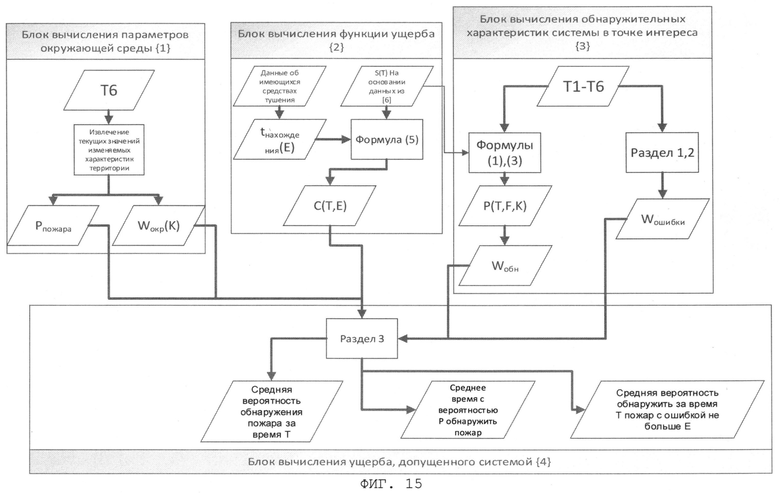
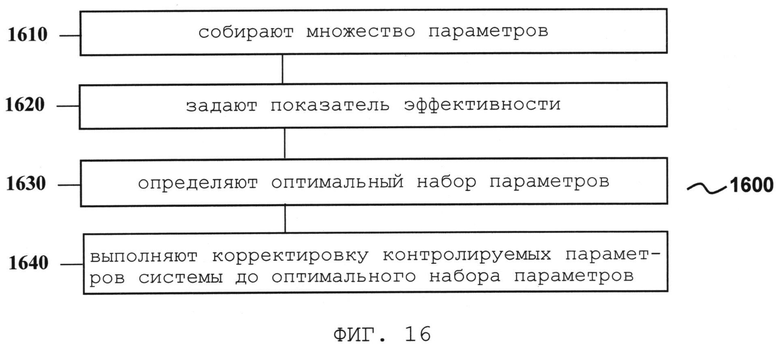
Изобретения относятся к области видеонаблюдения. Способы определения оптимальной конфигурации и настройки системы видеомониторинга характеризуются тем, что собирают множество параметров, относящихся к характеристикам точек видеомониторинга и характеристикам территории их размещения. Характеристики территории включают в себя ландшафтные характеристики, погодные данные и данные о лесных пожарах. Некоторые из параметров, относящихся к характеристикам точек видеомониторинга, являются контролируемыми. Задают показатель эффективности системы, который является интегральной величиной, описываемой вероятностной моделью, обобщающей, по меньшей мере, часть параметров. Выполняют перебор вариантов размещения точек видеомониторинга по множеству возможных позиций на территории путем того, что для установленного размещения точек видеомониторинга определяют оптимальный набор параметров, оптимизирующий показатель эффективности. Показатель эффективности вычисляют с варьированием контролируемых параметров, при этом для способа оптимальной настройки системы осуществляют корректировку контролирумых параметров до оптимального набора параметров. Определяют оптимальную конфигурацию системы, сравнивая полученные варианты размещения точек мониторинга, для которых определены оптимальные наборы параметров, и выбирают вариант размещения с наилучшим значением показателя эффективности. Система видеомониторинга 100 содержит модуль настройки, который выполнен с возможностью рассчитывать показатель эффективности системы, определять оптимальный набор параметров, который оптимизирует показатель эффективности системы, выполнять корректировку контролируемых параметров системы видеомониторинга до оптимального набора параметров. Изобретениями обеспечивается создание оптимальной конфигурации системы видеомониторинга, в которой каждая точка видеомониторинга имеет индивидуальный оптимальный набор параметров, что в свою очередь обеспечивает повышение эффективности работы и эксплуатации системы с целью раннего обнаружения лесных параметров. 3 н. и 25 з.п. ф-лы, 16 ил., 8 табл.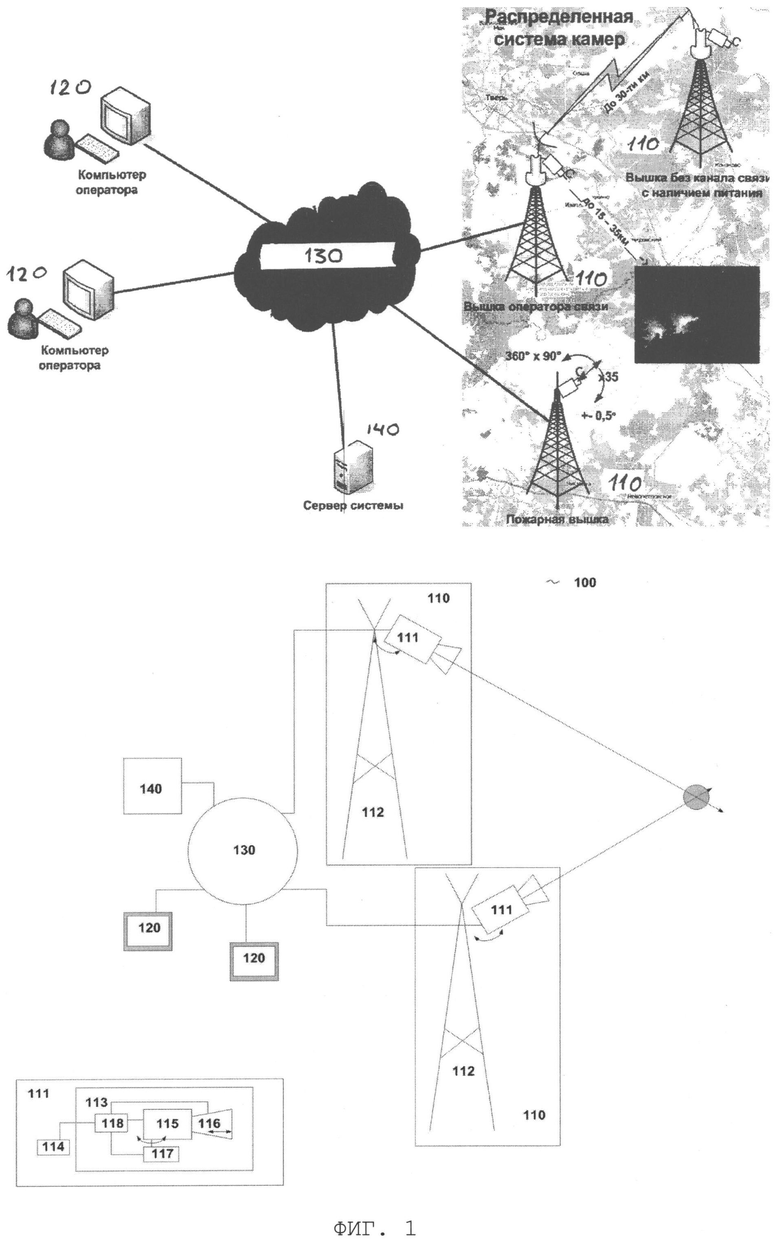
1. Способ определения оптимальной конфигурации системы видеомониторинга леса, содержащей множество точек видеомониторинга, каждая из которых содержит видеокамеру на высотном сооружении, при этом способ содержит этапы, на которых:
собирают множество параметров, относящихся к характеристикам точек видеомониторинга и характеристикам территории размещения точек видеомониторинга, причем характеристики территории включают в себя ландшафтные характеристики, погодные данные и данные о лесных пожарах, при этом по меньшей мере некоторые из параметров, относящихся к характеристикам точек видеомониторинга, являются контролируемыми;
задают один или более показателей эффективности системы видеомониторинга леса, причем каждый из этих показателей эффективности является интегральной величиной, описываемой вероятностной моделью, обобщающей, по меньшей мере, часть упомянутого множества параметров;
выполняют перебор вариантов размещения точек видеомониторинга по множеству возможных позиций на территории посредством того, что:
устанавливают размещение точек видеомониторинга и
для установленного размещения точек видеомониторинга определяют оптимальный набор параметров, оптимизирующий по меньшей мере один показатель эффективности из упомянутых одного или более показателей эффективности системы видеомониторинга леса, при этом данный показатель эффективности вычисляют с варьированием соответствующих ему контролируемых параметров; и
определяют оптимальную конфигурацию системы видеомониторинга леса посредством того, что:
сравнивают полученные варианты размещения точек видеомониторинга, для которых определены оптимальные наборы параметров, и
выбирают вариант размещения с наилучшим значением упомянутого показателя эффективности.
2. Способ по п.1, дополнительно содержащий этап, на котором задают одно или более ограничений, налагаемых на упомянутый по меньшей мере один показатель эффективности, при этом варианты размещения точек видеомониторинга, для которых этот показатель эффективности не удовлетворяет наложенным ограничениям, не учитываются при упомянутом сравнении.
3. Способ по п.1, в котором упомянутые один или более показателей эффективности представляют собой множество показателей эффективности системы видеомониторинга леса, при этом упомянутый по меньшей мере один показатель эффективности является сверткой показателей эффективности из упомянутого их множества с коэффициентами, характеризующими важность каждого отдельного показателя эффективности.
4. Способ по п.1, в котором система видеомониторинга леса представляет собой развертываемую систему видеомониторинга леса.
5. Способ по п.1, дополнительно содержащий этап, на котором при упомянутом выполнении перебора исключают из рассмотрения одну или более точек видеомониторинга, изменение позиции и/или характеристик которых не оказывает существенного влияния на определяемую оптимальную конфигурацию системы видеомониторинга леса.
6. Способ по п.1, в котором параметры, относящиеся к характеристикам точек видеомониторинга, включают в себя возможные разрешения, границы допустимых поворотов и скоростей поворотов камер, возможности каналов связи, границы зуммирования, возможности видеокамер по кодированию видеопотока.
7. Способ по п.6, в котором варьируемыми параметрами являются: конфигурации опорных точек маршрутов осмотра территории, представляющих собой набор значений (P, T, Z), где P и T - углы азимута и склонения в сферической системе координат с центром в месте расположения камеры, плоскость экватора которой расположена параллельно плоскости геометрического горизонта, а положению нулевого азимута соответствует направление на север, Z - приближение камеры (или связанные величины, такие как фокусное расстояние и углы поля зрения камеры); тип снимаемого материала (видео, изображения); время съемки одной позиции; параметры съемки (разрешение, параметры фокусировки, выдержки, диафрагмы, скорость съемки (количество кадров в секунду), параметры, специфичные для устанавливаемого оборудования, такие как баланс белого, усиление, IR-фильтр, параметры постобработки изображения и др.); параметры системы компьютерного зрения (пороги на чувствительность, параметры накопления, кластеризации, выделения объектов).
8. Способ по п.1, в котором ландшафтные характеристики включают в себя: границы территории интереса, карту высот местности, угол слепой зоны для видеокамеры, зоны запрета наблюдения, характеристики леса на территории (тип насаждений, плотность, вид деревьев).
9. Способ по п.1, в котором погодные данные представляют собой статистические погодные данные, включающие в себя историю и текущее состояние следующих метеорологических параметров: температура, количество и тип осадков, прозрачность атмосферы.
10. Способ по п.1, в котором данные о лесных пожарах включают в себя архив данных о лесных пожарах с информацией о координатах, времени и площади возгорания.
11. Способ по п.1, в котором упомянутые один или более показателей эффективности включают в себя одно или более из следующего: полный или средний ущерб, допущенный системой на рассматриваемой территории, средняя вероятность обнаружения пожара за заданное время на территории или в конкретных точках территории, среднее время, требуемое на обнаружение пожара с заданной вероятностью на территории или в конкретных точках территории, средняя вероятность обнаружить пожар за заданное время с ошибкой, не более заданной на территории или в конкретных точках территории.
12. Способ по п.2, в котором упомянутые одно или более ограничений включают в себя одно или более из следующего: ограничение на стоимость ввода системы в эксплуатацию; ограничение на полную стоимость владения в течение заданного срока; ограничение на количество вводимых в эксплуатацию точек мониторинга; ограничение снизу на вероятности обнаружения пожара на территории или в конкретных точках; ограничение сверху на времена обнаружения пожара на территории или в конкретных точках; ограничение сверху на ошибку определения координат на территории или в конкретных точках; ограничение на количество требуемых операторов системы; запрет использования более одной видеокамеры на высотном сооружении.
13. Способ по п.1, в котором упомянутый перебор вариантов размещения точек видеомониторинга прекращают по выполнению заранее заданного условия завершения, причем заранее заданным условием завершения является одно из следующего: устойчивое отсутствие улучшения упомянутого показателя эффективности при выполнении итераций данного перебора, исчерпание временной квоты, выделенной на выполнение перебора, достижение заранее определенного количества итераций.
14. Способ по п.1, в котором при вычислении упомянутого по меньшей мере одного показателя эффективности вычисляют прогнозную вероятность возникновения пожара на территории за период времени и плотность вероятности реализации конкретных условий окружающей среды, оценку зависимости ущерба, нанесенного пожаром, от времени нетушения пожара и ошибки определения его координат.
15. Способ по п.14, в котором прогнозную вероятность возникновения пожара оценивают на основе архивных данных о пожарах на территории в пожароопасные сезоны и с использованием методик прогноза вероятности возникновения пожара на основе предполагаемых классов пожарной опасности с учетом возможной погодной обстановки на территории.
16. Способ по п.14, в котором упомянутую зависимость ущерба получают на основе, по меньшей мере, данных о скорости распространения пожара для леса на территории и данных о времени нахождения очага возгорания силами тушения при определенной ошибке обнаружения координат возгорания, допущенной системой видеомониторинга леса.
17. Способ оптимальной настройки системы видеомониторинга леса, содержащей множество распределенных точек видеомониторинга, каждая из которых содержит видеокамеру на высотном сооружении, при этом способ содержит этапы, на которых:
собирают множество параметров, относящихся к характеристикам точек видеомониторинга и характеристикам территории размещения точек видеомониторинга, причем характеристики территории включают в себя ландшафтные характеристики, погодные данные и данные о лесных пожарах, при этом по меньшей мере некоторые из параметров, относящихся к характеристикам точек видеомониторинга, являются контролируемыми;
задают по меньшей мере один показатель эффективности системы видеомониторинга леса, причем этот показатель эффективности является интегральной величиной, описываемой вероятностной моделью, обобщающей упомянутое множество параметров;
определяют оптимальный набор параметров, который оптимизирует упомянутый по меньшей мере один показатель эффективности системы видеомониторинга леса, при этом данный показатель эффективности вычисляют с варьированием контролируемых параметров;
выполняют корректировку контролируемых параметров системы видеомониторинга леса до оптимального набора параметров.
18. Способ по п.17, в котором погодные данные представляют собой данные о текущей погодной обстановке.
19. Способ по п.17, в котором упомянутую корректировку выполняют в непрерывном режиме.
20. Способ по п.17, в котором упомянутую корректировку выполняют при условии того, что полученный оптимальный набор параметров обеспечивает улучшение работы системы видеомониторинга леса в плане упомянутого по меньшей мере одного показателя эффективности на величину, не меньшую заранее заданного порога.
21. Способ по п.18, в котором упомянутое определение оптимального набора параметров завершают по истечении заранее заданного времени.
22. Система видеомониторинга леса, содержащая:
множество дистанционно управляемых точек видеомониторинга, каждая из которых содержит видеокамеру на высотном сооружении;
один или более операторских компьютерных терминалов и
компьютерно-реализованный модуль настройки,
при этом модуль настройки выполнен с возможностью рассчитывать по меньшей мере один показатель эффективности системы видеомониторинга леса, причем этот показатель эффективности является интегральной величиной, описываемой вероятностной моделью, обобщающей собранное множество параметров, относящихся к характеристикам точек видеомониторинга и характеристикам территории размещения точек видеомониторинга, причем характеристики территории включают в себя ландшафтные характеристики, погодные данные и данные о лесных пожарах, при этом по меньшей мере некоторые из параметров, относящихся к характеристикам точек видеомониторинга, являются контролируемыми;
при этом модуль настройки сконфигурирован:
определять оптимальный набор параметров, который оптимизирует упомянутый по меньшей мере один показатель эффективности системы видеомониторинга леса, при этом данный показатель эффективности итерационно вычисляется с варьированием контролируемых параметров, и
выполнять корректировку контролируемых параметров системы видеомониторинга леса до оптимального набора параметров.
23. Система видеомониторинга леса по п.22, которая дополнительно включает в себя сервер, при этом модуль настройки представляет собой программное обеспечение, исполняющееся на сервере.
24. Система видеомониторинга леса по п.22, в которой модуль настройки представляет собой программное обеспечение, исполняющееся на по меньшей мере одном операторском компьютерном терминале.
25. Система видеомониторинга леса по п.22, в которой модуль настройки представляет собой компьютерное устройство, выполненное с возможностью обмена данными с точками видеомониторинга и операторскими компьютерными терминалами.
26. Система видеомониторинга леса по п.22, в которой модуль настройки сконфигурирован выполнять упомянутую корректировку в непрерывном режиме.
27. Система видеомониторинга леса по п.22, в которой модуль настройки сконфигурирован выполнять упомянутую корректировку при условии того, что полученный оптимальный набор параметров обеспечивает улучшение работы системы видеомониторинга леса в плане упомянутого по меньшей мере одного показателя эффективности на величину, не меньшую заранее заданного порога.
28. Система видеомониторинга леса по п.22, в которой модуль настройки сконфигурирован прерывать упомянутое определение оптимального набора параметров по истечении заранее заданного времени.
| Cтатья “Лесной дозор”, http://www.lesdozor.ru/ru/problemy-obnaruzheniya-lesnyh-pozharov/analitika/qlesnoj-dozorq-effektivnaya-sistema-rannego-obnaruzheniya-lesnykh-pozharov, размещенная на сайте 26.03.2013; | |||
| СИСТЕМА И СПОСОБ ВИДЕОМОНИТОРИНГА ЛЕСА | 2011 |
|
RU2458407C1 |
| СИСТЕМА НА ОСНОВЕ ЛИДАРА С КОМПЬЮТЕРНЫМ УПРАВЛЕНИЕМ ДЛЯ ИДЕНТИФИКАЦИИ ДЫМА, В ЧАСТНОСТИ ДЛЯ ВЫЯВЛЕНИЯ ЛЕСНОГО ПОЖАРА НА РАННЕЙ СТАДИИ | 2002 |
|
RU2293998C2 |
| RU 113046 U1, 27.01.2012 | |||
| US 5734335 A, 31.03.1998 | |||

