ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к сельскохозяйственным уборочным машинам. Более конкретно, оно относится к системам и способам управления нагрузкой для сельскохозяйственных уборочных машин.
УРОВЕНЬ ТЕХНИКИ
Уборочные приставки или «жатки» представляют собой удлиненные, выступающие в боковом направлении устройства. Они подвешены на конструкции, называемой приемной камерой, которая выступает вперед у сельскохозяйственных комбайнов. Они срезают возделываемые растения и переносят срезанные возделываемые растения в открытый передний конец приемной камеры. Приемная камера переносит срезанный убираемый материал назад и в сам сельскохозяйственный комбайн. Сельскохозяйственный комбайн затем обмолачивает срезанный убираемый материал, отделяя зерно от другого растительного материала, и сохраняет зерно в зерновом резервуаре или зерновом бункере на сельскохозяйственном комбайне.
Уборочные приставки движутся с относительно высокой скоростью и очень близко к земле. В результате они склонны сталкиваться с землей. Чем они больше и шире, тем больше риск повреждения уборочной приставки, когда происходят столкновения.
Вследствие этого необходима система для управления или ограничения нагрузок ввиду таких столкновений с землей. Задача данного изобретения состоит в создании подобной системы.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом изобретения предложена система для управления нагрузкой на сельскохозяйственной уборочной машине, при этом система содержит первый датчик нагрузки, установленный для определения первой нагрузки, прикладываемой к сельскохозяйственной уборочной машине; второй датчик нагрузки, установленный для определения второй нагрузки, прикладываемой к сельскохозяйственной уборочной машине, электронный блок управления, соединенный с первым датчиком нагрузки и вторым датчиком нагрузки, при этом электронный блок управления выполнен с возможностью (a) считывания сигнала первой нагрузки с первого датчика нагрузки, (b) считывания сигнала второй нагрузки со второго датчика нагрузки, (c) определения, превышает ли разность между первой нагрузкой и второй нагрузкой пороговую нагрузку, и (d) если разность превышает пороговую нагрузку, либо (i) подъема уборочной приставки, либо (ii) остановки движения по земле сельскохозяйственной уборочной машины.
Сельскохозяйственная уборочная машина может дополнительно содержать самоходное сельскохозяйственное уборочное транспортное средство и приемную камеру, шарнирно соединенную с передней частью самоходного сельскохозяйственного уборочного транспортного средства на первом шарнире и втором шарнире.
Первый датчик нагрузки может быть расположен рядом с первым шарниром, а второй датчик нагрузки может быть расположен рядом со вторым шарниром.
Сельскохозяйственная уборочная машина может дополнительно содержать раму, шарнирно соединенную с передней частью приемной камеры на третьем шарнире и четвертом шарнире, и рама может быть выполнена с возможностью поддержки уборочной приставки.
Первый датчик нагрузки может быть расположен рядом с третьим шарниром, а второй датчик нагрузки может быть расположен рядом с четвертым шарниром.
Сельскохозяйственная уборочная машина может дополнительно содержать первый подъемный цилиндр приемной камеры и второй подъемный цилиндр приемной камеры. Первый подъемный цилиндр приемной камеры и второй подъемный цилиндр приемной камеры могут быть выполнены с возможностью перемещения переднего конца приемной камеры в вертикальном направлении. Задний конец первого подъемного цилиндра приемной камеры может быть соединен с самоходным сельскохозяйственным уборочным транспортным средством на третьем шарнире. Задний конец второго подъемного цилиндра приемной камеры может быть соединен с самоходным сельскохозяйственным уборочным транспортным средством на четвертом шарнире.
Первый датчик нагрузки может быть расположен рядом с третьим шарниром. Второй датчик нагрузки может быть расположен рядом с четвертым шарниром.
Первый датчик нагрузки может быть расположен рядом с передним концом первого подъемного цилиндра приемной камеры. Второй датчик нагрузки может быть расположен рядом с передним концом второго подъемного цилиндра приемной камеры.
Первый датчик нагрузки может быть установлен для определения первой нагрузки, прикладываемой к левой стороне сельскохозяйственной уборочной машины, а второй датчик нагрузки установлен для определения второй нагрузки, прикладываемой к правой стороне сельскохозяйственной уборочной машины.
Первый датчик нагрузки может быть установлен для определения первой нагрузки в первом положении с левой стороны сельскохозяйственной уборочной машины. Второй датчик нагрузки может быть установлен для определения второй нагрузки во втором положении с правой стороны сельскохозяйственной уборочной машины. Первое положение и второе положение могут находиться прямо друг напротив друга и равноудалены от проходящей продольно и вертикально плоскости, которая проходит через боковую середину по меньшей мере одного из (a) сельскохозяйственной уборочной машины, (b) уборочной приставки и (c) приемной камеры.
В соответствии со вторым аспектом изобретения предложен способ управления нагрузкой на сельскохозяйственной уборочной машине, при этом способ содержит: этап автоматического и электронного измерения первой нагрузки, прикладываемой к сельскохозяйственной уборочной машине; этап автоматического и электронного измерения второй нагрузки, прикладываемой к сельскохозяйственной уборочной машине; этап автоматического и электронного определения, превышает ли разность величины между первой нагрузкой и второй нагрузкой пороговую нагрузку; и этап автоматического и электронного (a) подъема сельскохозяйственной уборочной приставки или (b) остановки передвижения по земле сельскохозяйственной уборочной машины, когда разность величины между первой нагрузкой и второй нагрузкой превышает пороговую нагрузку.
Этап автоматического и электронного измерения первой нагрузки, прикладываемой к сельскохозяйственной уборочной машине, может содержать этап автоматического и электронного измерения первой нагрузки в первом местоположении, находящемся с левой стороны сельскохозяйственной уборочной машины. Этап автоматического и электронного измерения второй нагрузки, прикладываемой к сельскохозяйственной уборочной машине, может содержать этап автоматического и электронного измерения второй нагрузки во втором местоположении, находящемся с правой стороны сельскохозяйственной уборочной машины.
Первое местоположение и второе местоположение могут находиться прямо друг напротив друга и равноудалены от проходящей продольно и вертикально плоскости, проходящей через боковую середину по меньшей мере одного из (a) сельскохозяйственной уборочной машины, (b) уборочной приставки и (c) приемной камеры.
Сельскохозяйственная уборочная машина может содержать самоходное сельскохозяйственное уборочное транспортное средство и приемную камеру, соединенную с самоходным сельскохозяйственным уборочным транспортным средством и выступающую вперед из него. Первую нагрузку можно измерять в местоположении рядом с левой стороной приемной камеры. Вторую нагрузку можно измерять в местоположении рядом с правой стороной приемной камеры.
Первую нагрузку можно измерять в местоположении рядом с левой стороной приемной камеры на переднем конце приемной камеры. Вторую нагрузку можно измерять в местоположении рядом с правой стороной приемной камеры на переднем конце приемной камеры.
Первую нагрузку можно измерять в местоположении рядом с левой стороной приемной камеры на заднем конце приемной камеры. Вторую нагрузку можно измерять в местоположении рядом с правой стороной приемной камеры на заднем конце приемной камеры.
Первую нагрузку можно измерять на переднем конце левостороннего подъемного цилиндра приемной камеры. Вторую нагрузку можно измерять на переднем конце правостороннего подъемного цилиндра приемной камеры.
Первую нагрузку можно измерять на заднем конце левостороннего подъемного цилиндра приемной камеры. Вторую нагрузку можно измерять на заднем конце правостороннего подъемного цилиндра приемной камеры.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой вид сверху сельскохозяйственной уборочной машины в соответствии с изобретением.
Фиг. 2 представляет собой вид сбоку приемной камеры сельскохозяйственной уборочной машины по Фиг. 1.
Фиг. 3 представляет собой схематичное изображение гидравлического и электрического контура управления на сельскохозяйственной уборочной машине для управления нагрузками, прикладываемыми к приемной камере по Фиг. 1 и 2.
Фиг. 4 представляет собой блок-схему режима работы контура управления по Фиг. 3.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В нижеприведенном описании термины «передний», «вперед», «впереди» и их варианты относятся к направлению движения вперед транспортного средства по мере того, как оно движется по полю, убирая сельскохозяйственные культуры. На Фиг. 1 данное направление движения обозначено буквой "V".
В нижеприведенном описании термины «задний», «назад», «позади» и их варианты относятся к направлению, противоположному направлению движения вперед.
В нижеприведенном описании термин «поперечный», «боковой» или «бок о бок» относятся к направлению, которое в общем горизонтально и перпендикулярно направлению движения "V".
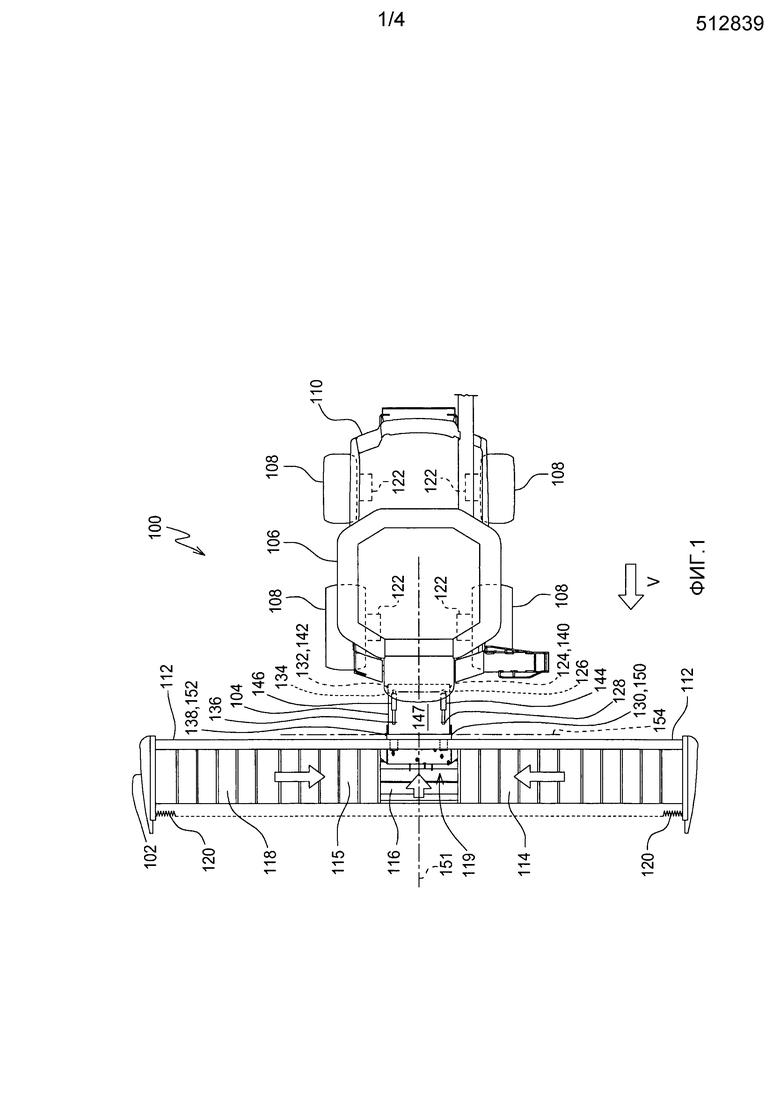
Далее, как показано на Фиг. 1 и 2, сельскохозяйственная уборочная машина 100 содержит уборочную приставку 102, которая установлена на приемной камере 104, которая опирается на переднюю часть самоходного сельскохозяйственного уборочного транспортного средства 106.
Самоходное сельскохозяйственное уборочное транспортное средство 106 опирается на четыре колеса 108, которые входят в зацепление с землей и поддерживают сельскохозяйственную уборочную машину 100 для передвижения по земле, убирая сельскохозяйственные культуры. Колеса 108 соединены с рамой 110 самоходного сельскохозяйственного уборочного транспортного средства 106. По мере уборки сельскохозяйственной культуры сельскохозяйственная уборочная машина 100 движется по полю в направлении "V".
Уборочная приставка 102 содержит удлиненную раму 112, которая поддерживает левосторонний замкнутый транспортер 114, центральный замкнутый транспортер 116 и правосторонний замкнутый транспортер 118. Левосторонний замкнутый транспортер 114, центральный замкнутый транспортер 116 и правосторонний замкнутый транспортер 118 принимают возделываемые растения, срезанные с земли, и переносят возделываемые растения в направлениях, обозначенных стрелкой, наложенной на транспортеры, к проходу 119, находящемуся в задней центральной части уборочной приставки 102. Удлиненный движущийся возвратно-поступательно нож 120 отрезает возделываемые растения от корней. Удлиненный движущийся возвратно-поступательно нож 120 проходит в поперечном направлении по существу на всю ширину уборочной приставки 102.
Каждое из четырех колес 108 самоходного сельскохозяйственного уборочного транспортного средства 106 приводится во вращение соответствующим гидравлическим двигателем 122. Четыре колеса 108 поддерживают самоходное сельскохозяйственное уборочное транспортное средство 106 для передвижения по земле.
Четыре датчика 124, 126, 128 и 130 нагрузки находятся рядом с левой стороной приемной камеры 104. Четыре датчика 132, 134, 136, 138 нагрузки находятся рядом с правой стороной приемной камеры 104.
Датчик 124 нагрузки и датчик 132 нагрузки расположены с каждой стороны приемной камеры 104 на левостороннем шарнире 140 приемной камеры и на правостороннем шарнире 142 приемной камеры.
Приемная камера 104 опирается на переднюю часть самоходного сельскохозяйственного уборочного транспортного средства 106 на левостороннем шарнире 140 приемной камеры и на правостороннем шарнире 142 приемной камеры. Данные шарниры вынуждают приемную камеру 104 поворачиваться вокруг проходящей в боковом направлении горизонтальной оси поворота, которая образована как левосторонним шарниром 140 приемной камеры, так и правосторонним шарниром 142 приемной камеры и является соосной с ними.
Для определения нагрузки, прикладываемой к самоходному сельскохозяйственному уборочному транспортному средству 106 приемной камерой 104, на левостороннем шарнире 140 приемной камеры установлен датчик 124 нагрузки. Для определения нагрузки, прикладываемой к самоходному сельскохозяйственному уборочному транспортному средству 106 приемной камерой 104, на правостороннем шарнире 142 приемной камеры установлен датчик 132 нагрузки.
Для измерения нагрузки, прикладываемой к самоходному сельскохозяйственному уборочному транспортному средству 106 задним (цилиндрическим) концом левостороннего подъемного цилиндра 144 приемной камеры, с левой стороны приемной камеры 104 расположен датчик 126 нагрузки. Для измерения нагрузки, прикладываемой к самоходному сельскохозяйственному уборочному транспортному средству 106 задним (цилиндрическим) концом правостороннего подъемного цилиндра 146 приемной камеры, с правой стороны приемной камеры 104 расположен датчик нагрузки 134.
Задний конец левостороннего подъемного цилиндра 144 приемной камеры соединен с самоходным сельскохозяйственным уборочным транспортным средством 106 рядом с левой стороной приемной камеры 104. Задний конец правостороннего подъемного цилиндра 146 приемной камеры соединен с самоходным сельскохозяйственным уборочным транспортным средством 106 рядом с правой стороной приемной камеры 104.
Для измерения нагрузки, прикладываемой к приемной камере 104 передним концом левостороннего подъемного цилиндра 144 приемной камеры и передним концом правостороннего подъемного цилиндра 146 приемной камеры соответственно, с каждой стороны приемной камеры 104 расположены датчик 128 нагрузки и датчик 136 нагрузки. Рядом с передним концом левостороннего цилиндра 144 приемной камеры расположен датчик 128 нагрузки. Рядом с передним концом правостороннего цилиндра 146 приемной камеры расположен датчик 136 нагрузки.
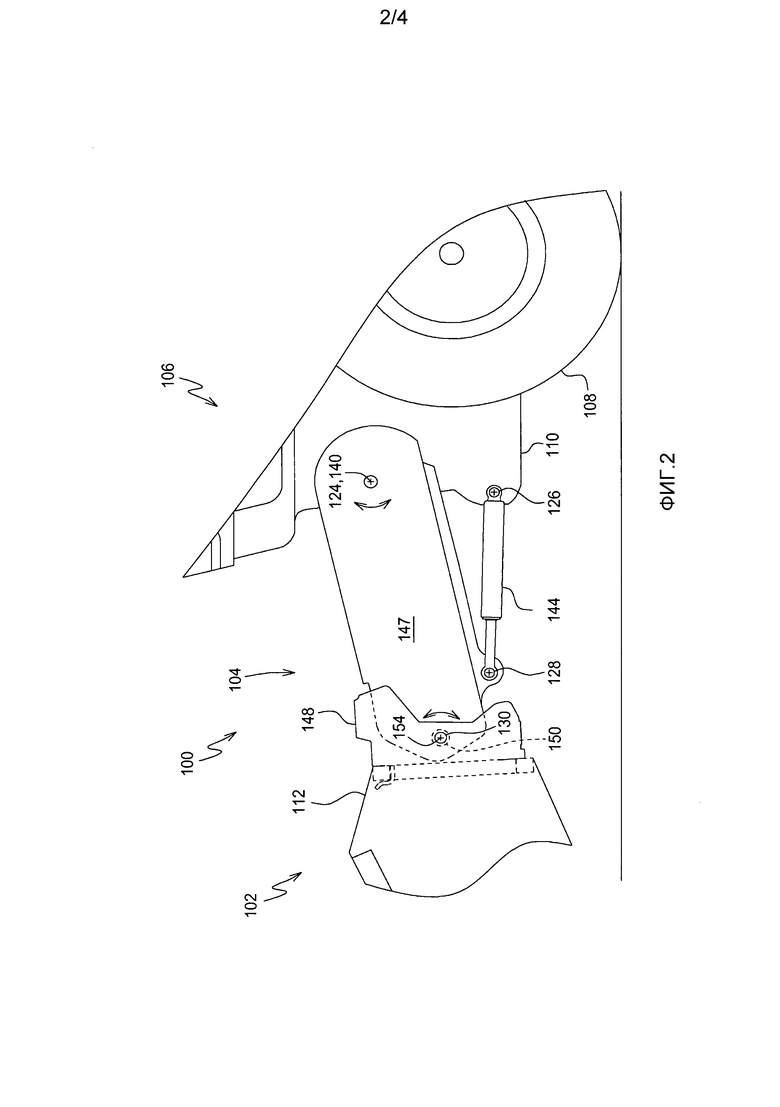
Передний конец левостороннего подъемного цилиндра 144 приемной камеры соединен с нижней частью приемной камеры 104 (которая содержит переднюю раму 148) с левой стороны приемной камеры 104. Передний конец правостороннего подъемного цилиндра приемной камеры соединен с нижней частью приемной камеры 104 (которая содержит переднюю раму 148) с правой стороны приемной камеры 104.
Левосторонний подъемный цилиндр 144 приемной камеры и правосторонний подъемный цилиндр 146 приемной камеры соединены между приемной камерой 104 и самоходным сельскохозяйственным уборочным транспортным средством 106 для подъема и опускания переднего конца приемной камеры 104 посредством выдвижения и втягивания под управлением компьютера, поднимая и опуская за счет этого уборочную приставку 102 относительно земли.
Приемная камера 104 содержит в общем прямоугольный коробообразный корпус с открытыми концами, имеющий передний конец, и переднюю раму 148, соединенную с передним концом коробообразного корпуса 147.
Коробообразный корпус 147 окружает транспортер (не показано), который транспортирует срезанный убираемый материал, который проходит через переднюю раму 148 и поступает в передний конец 147 коробообразного корпуса. Транспортер транспортирует срезанный убираемый материал вверх и назад до тех пор, пока он не выходит из приемной камеры 104 рядом с левосторонним шарниром 140 приемной камеры и правосторонним шарниром 142 приемной камеры.
Передняя рама в общем прямоугольная и образует проход, в который центральный замкнутый транспортер 116 помещает срезанный убираемый материал.
Передняя рама 148 соединена с передним концом коробообразного корпуса 147 с левой стороны и с правой стороны коробообразного корпуса 147 и с левой стороны и с правой стороны передней рамы 148 на левостороннем шарнире 150 и правостороннем шарнире 152 соответственно.
Левосторонний шарнир 150 и правосторонний шарнир 152 вынуждают переднюю раму 148 поворачиваться относительно переднего конца приемной камеры 104 вокруг горизонтальной и проходящей в боковом направлении оси 154 поворота, которая является соосной с ними и проходит через левосторонний шарнир 150 и правосторонний шарнир 152.
Угол уборочной приставки 102 относительно земли можно регулировать за счет поворота передней рамы 148 относительно переднего конца коробообразного корпуса 147. Передняя рама 148 выполнена с возможностью опоры по существу всей массы уборочной приставки 102 на передний конец коробообразного корпуса 147.
Датчик нагрузки 130 и датчик нагрузки 138 расположены с каждой стороны приемной камеры 104 на левостороннем шарнире 150 и правостороннем шарнире 152 или рядом с ними для измерения нагрузки, прикладываемой передней рамой 148 к приемной камере 104, на левостороннем шарнире 150 и правостороннем шарнире 152 соответственно.
Фиг. 2 представляет собой вид слева сбоку сельскохозяйственной уборочной машины 100. Сельскохозяйственная уборочная машина 100 является симметричной относительно общей проходящей продольно и вертикальной плоскости 151, проходящей через боковой центр приемной камеры 104, боковой центр самоходного сельскохозяйственного уборочного транспортного средства 106 и боковой центр уборочной приставки 102.
Соответственно левостороннее расположение, показанное на Фиг. 2, идентично правостороннему расположению, но в виде зеркального отражения. Соответственно правосторонние датчики нагрузки, правосторонний гидравлический подъемный цилиндр и правосторонние шарниры и другие конструкции идентичны левосторонним датчикам нагрузки, левостороннему гидравлическому цилиндру и левосторонним шарнирам. Соответственно также каждая пара прямо противоположных левосторонних и правосторонних датчиков нагрузки равноудаленно разнесены, но в противоположных направлениях (т.е. одна влево, одна вправо) относительно проходящей продольно и вертикально центральной плоскости сельскохозяйственной уборочной машины 100, уборочной приставки 102 и приемной камеры 104.
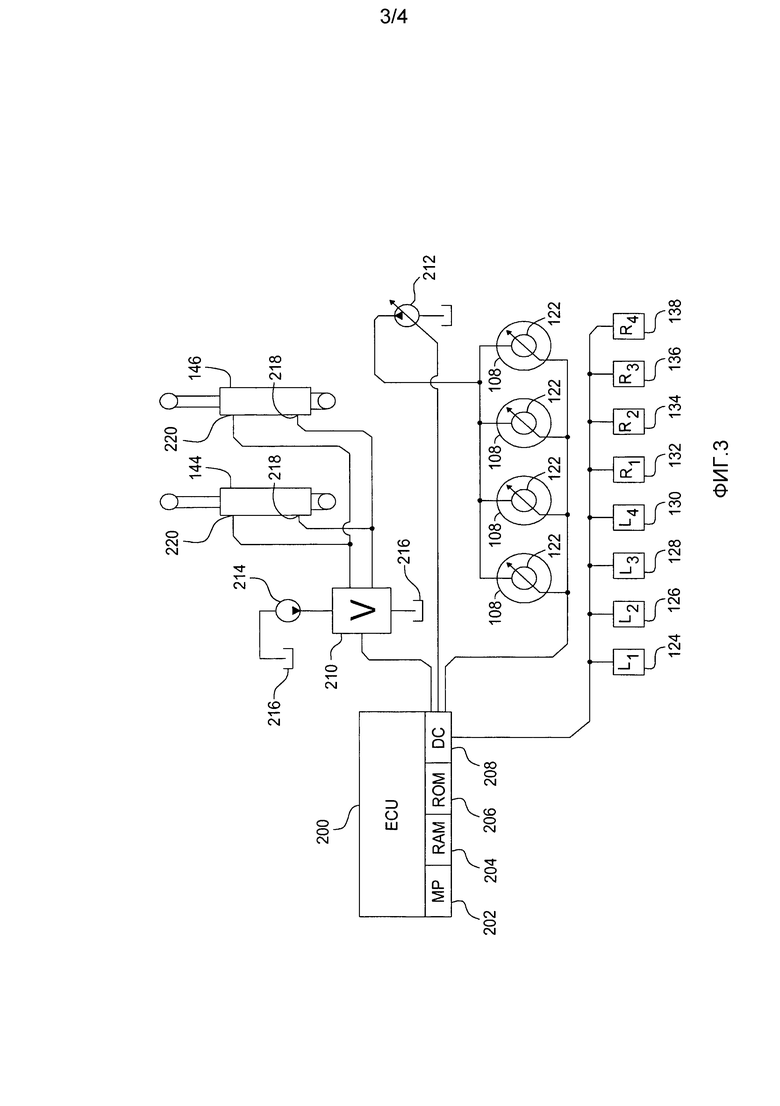
Обращаясь к Фиг. 3, электронный блок 200 управления (ECU) содержит микропроцессор 202, схему 204 оперативного запоминающего устройства (RAM), схему 206 постоянного запоминающего устройства (ROM) и схему 208 преобразования сигнала/возбуждения. Микропроцессор 202 выполняет запрограммированные команды, хранящиеся в ROM 206. RAM 204 предусмотрена, чтобы позволить микропроцессору 202 сохранять рассчитанные значения, необходимые для его надлежащей работы. Схема 208 преобразования сигнала/возбуждения предусмотрена, чтобы позволить ECU 200 принимать сигналы от различных датчиков и преобразованные сигналы для использования микропроцессором 202 и усиливать сигнал, обеспеченный микропроцессором 202, до уровней сигналов, достаточных для приведения в действие компонентов, управляемых ECU 200. ECU 200 соединен с датчиками 124, 126, 128, 130 нагрузки, расположенными с левой стороны приемной камеры 104, и принимает от них сигналы. ECU 200 соединен с датчиками 132, 134, 136, 138 нагрузки, расположенными с правой стороны приемной камеры 104, и принимает от них сигналы.
ECU 200 соединен с гидравлическим насосом 212, который представляет собой насос с переменным рабочим объемом, и передает ему управляющие сигналы. ECU 200, таким образом, изменяет рабочий объем гидравлического насоса 212 и вследствие этого выход гидравлической жидкости из гидравлического насоса 212.
ECU 200 соединен с четырьмя гидравлическими двигателями 122, соединенными с каждым из четырех колес 108 соответственно, и передает им управляющие сигналы. Четыре гидравлических двигателя 122 представляют собой двигатели с переменным рабочим объемом. Управляющие сигналы, поступающие четырем гидравлическим двигателям 122, изменяют рабочий объем четырех гидравлических двигателей 122.
Гидравлический насос 212 и четыре гидравлических двигателя 122 соединены вместе в гидростатическом задающем контуре. ECU 200 выполнен с возможностью изменения скорости самоходного сельскохозяйственного уборочного транспортного средства 106 по земле посредством изменения рабочего объема гидравлического насоса 212 и рабочего объема четырех гидравлических двигателей 122.
ECU 200 также соединен с гидравлическим клапаном 210 и передает ему управляющие сигналы. Гидравлический клапан 210 соединен с источником 214 гидравлической жидкости и принимает от него гидравлическую жидкость под давлением. Гидравлический клапан 210 соединен с резервуаром 216 для гидравлической жидкости и высвобождает в него гидравлическую жидкость. Гидравлический клапан 210 избирательно передает гидравлическую жидкость в порты 218 выдвижения на левостороннем подъемном цилиндре 144 приемной камеры и правостороннем подъемном цилиндре 146 приемной камеры. Гидравлический клапан 210 избирательно передает жидкость в порты 220 втягивания на левостороннем подъемном цилиндре 144 приемной камеры и правостороннем подъемном цилиндре 146 приемной камеры.
ECU 200 выполнен с возможностью подъема уборочной приставки 102 за счет управления гидравлического клапана 210 подавать гидравлическую жидкость под давлением из источника 214 гидравлической жидкости в порты 218 выдвижения и для возврата гидравлической жидкости из портов 220 втягивания в резервуар 216 для гидравлической жидкости.
ECU 200 также выполнен с возможностью опускания уборочной приставки 102 за счет управления гидравлического клапана 210 подавать гидравлическую жидкость из источника 214 гидравлической жидкости в порты 220 втягивания и для возврата гидравлической жидкости из портов 218 выдвижения в резервуар 216 для гидравлической жидкости.
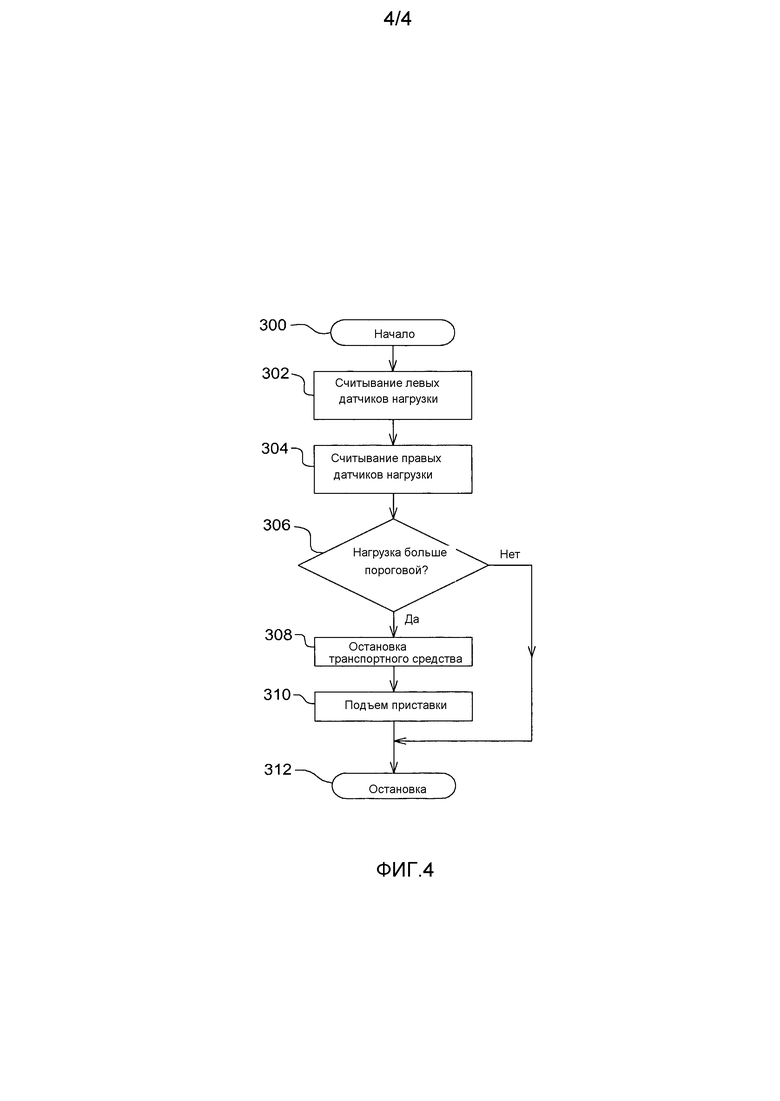
Фиг. 4 иллюстрирует работу ECU 200 под управлением команд, хранящихся в ROM 206.
Процесс начинается на этапе 300 и переходит на этап 302.
На этапе 302 ECU 200 считывает сигналы, обеспеченные левыми датчиками 124, 126, 128, 130 нагрузки.
На этапе 304 ECU 200 считывает сигналы, обеспеченные правыми датчиками 132, 134, 136, 138 нагрузки.
На этапе 306 ECU 200 сравнивает сигнал нагрузки, обеспечиваемый левыми датчиками 124, 126, 128, 130 нагрузки, с сигналом нагрузки, обеспечиваемым правыми датчиками 132, 134, 136, 138 нагрузки.
Если ECU определяет, что разность нагрузки, показанной датчиками 124, 126, 128, 130 нагрузки, по сравнению с нагрузкой, показанной датчиками 132, 134, 136, 138 нагрузки, выше чем пороговое значение нагрузки, хранящееся в запоминающих схемах ECU 200, то ECU 200 переходит на этап 308. На этапе 308 ECU 200 выдает сигнал гидравлическому насосу 212 и выдает сигналы четырем гидравлическим двигателям 122 изменить свой рабочий объем таким образом, чтобы самоходное сельскохозяйственное уборочное транспортное средство 106 остановило движение вперед.
Если ECU 200 определяет, что разность нагрузки меньше чем пороговая, ECU переходит на этап 312 и процесс завершается.
На этапе 310 ECU 200 передает сигнал гидравлическому клапану 210 выдвинуть левосторонний подъемный цилиндр 144 приемной камеры и правосторонний подъемный цилиндр 146 приемной камеры. Когда левосторонний подъемный цилиндр 144 приемной камеры и правосторонний подъемный цилиндр 146 приемной камеры выдвигаются, приемная камера 104 поворачивается по часовой стрелке (как показано на Фиг. 2) и поднимает передний конец приемной камеры 104 выше над землей. Это, в свою очередь, поднимает переднюю раму 148, которая, в свою очередь, поднимает уборочную приставку 102.
После выполнения этапа 310 ECU 200 переходит на этап 312 и завершает.
Процесс по Фиг. 4 запрограммирован на частое повторение через определенные промежутки времени по мере того, как самоходное сельскохозяйственное уборочное транспортное средство 106 движется по полю, убирая урожай. Обычно планируют, чтобы процесс по Фиг. 4 выполнялся каждые 5-40 миллисекунд.
В вышеприведенном описании четыре датчика нагрузки предусмотрены с левой стороны приемной камеры 104 и четыре датчика нагрузки предусмотрены с правой стороны приемной камеры 104.
В другой конфигурации в процессе по Фиг. 4 ECU 200 считывает и использует один из датчиков нагрузки с левой стороны и один из датчиков нагрузки с правой стороны. В данной конфигурации используются датчик 124 нагрузки и датчик 132 нагрузки. В качестве альтернативы в данной конфигурации используются датчик 126 нагрузки и датчик нагрузки 134. В качестве альтернативы в данной конфигурации используются датчик 128 нагрузки и датчик 136 нагрузки. В качестве альтернативы в данной конфигурации используются датчик нагрузки 130 и датчик нагрузки 138.
В другой конфигурации в процессе по Фиг. 4 ECU 200 считывает и использует два датчика нагрузки с левой стороны и два датчика нагрузки с правой стороны.
В другой конфигурации в процессе по Фиг. 4 ECU 200 считывает и использует три датчика нагрузки с левой стороны и три датчика нагрузки с правой стороны.
Преимущество любой из изложенных выше конфигураций состоит в том, что система может быстро выявлять асимметричную нагрузку на уборочной приставке 102, вызванную контактом с землей одной стороны или другой стороны уборочной приставки 102. Когда одна сторона уборочной приставки 102 контактирует с землей, это выглядит, как быстро растущая асимметричная нагрузка с одной стороны приемной камеры 104 по сравнению с другой стороной приемной камеры 104. Нагрузка может быть относительно небольшой, но вследствие того что она является асимметричной (что определяется за счет получения разности сигналов с левой стороны и сигналов с правой стороны), она показывает даже легкие торсионные нагрузки, которые могли бы закрутить уборочную приставку 102 по часовой стрелке или против часовой стрелки (как показано на Фиг. 1) относительно самоходного сельскохозяйственного уборочного транспортного средства 106. Именно эти торсионные или закручивающие нагрузки создают существенную проблему для сельскохозяйственной уборочной машины 100 в противоположность равномерной нагрузке прикладываемой назад по всей ширине уборочной приставки 102. Торсионные или закручивающие нагрузки, вызываемые любым соударением с землей или другим твердым объектом, могут вызывать немедленное и значительное повреждение уборочной приставки 102 или приемной камеры 104. По этой причине важно делать различие между величиной нагрузки в общем на приемной камере 104 и величиной торсионной составляющей нагрузки на приемной камере 104.
Конфигурация, описанная в данном документе, позволяет ECU 200 немедленно идентифицировать торсионную нагрузку перед тем, как она становится слишком большой, и снижать данную нагрузку либо посредством остановки уборочного комбайна, либо посредством подъема уборочной приставки 102, когда выявляется данная нагрузка. В каждом случае, если именно контакт с землей вызывает неожиданное возникновение торсионной нагрузки на приемной камере 104, остановка уборочного комбайна и подъем уборочной приставки 102 смягчит или предотвратит любое подобное повреждение вследствие торсионных нагрузок.
В другой конфигурации может выполняться либо этап 308 (остановка самоходного сельскохозяйственного уборочного транспортного средства 106), либо этап 310 (подъем уборочной приставки 102). Для того чтобы обеспечить выгоду от уменьшения повреждения приемной камеры 104, нет необходимости выполнения обеих этапов.
Описание и чертежи в данном документе приведены для иллюстрации по меньшей мере одного конкретного примера того, как изобретение можно осуществить на практике. Однако само изобретение не ограничено конкретным практическим применением, описанным в данном документе. Формула изобретения (ниже) ограничивает изобретение и охватывает больше, чем конкретные примеры, приведенные в данном документе.
Например, вышеприведенное описание со ссылкой на приложенное к нему схематичное изображение описывает ECU 200. ECU 200 может быть одним ECU 200, или это может быть два или более ECU 200, соединенных сетью связи. Одно ECU 200 может осуществлять все функции, описанные в данном документе, или каждое из множества ECU 200 может по выбору осуществлять часть функций, описанных в данном документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УБОРОЧНЫЙ КОМБАЙН С УСТРОЙСТВОМ ПРИЕМНОЙ КАМЕРЫ МОЛОТИЛКИ | 2014 |
|
RU2645224C2 |
| ДВУХСТОРОННИЙ ВЫДВИГАЕМЫЙ ПРИВОДНОЙ ВАЛ ДЛЯ АВТОМАТИЧЕСКОГО ПРИСОЕДИНЕНИЯ ЖАТКИ | 2014 |
|
RU2665620C2 |
| СРЕДСТВО РЕГУЛИРОВАНИЯ ВЫСОТЫ ЖАТКИ С КОМПЕНСАЦИЕЙ ПРОГИБА ШИН | 2012 |
|
RU2607104C2 |
| ПОЛОТЕННАЯ ПЛАТФОРМА С ЦЕНТРАЛЬНЫМ ТРАНСПОРТЕРОМ И СПОСОБ ЗАМЕНЫ ЛЕНТЫ ЦЕНТРАЛЬНОГО ТРАНСПОРТЕРА | 2012 |
|
RU2607094C2 |
| КОНТУР УПРАВЛЕНИЯ УСИЛИЕМ НА ГРУНТ ШАРНИРНО-СОЧЛЕНЕННОЙ УБОРОЧНОЙ ЖАТКИ | 2014 |
|
RU2672373C2 |
| ПЛАВАЮЩАЯ СИСТЕМА ЖАТКИ ДЛЯ ИСПОЛЬЗОВАНИЯ С СЕЛЬСКОХОЗЯЙСТВЕННЫМ ВИНДРОУЭРОМ ИЛИ КОМБАЙНОМ | 2009 |
|
RU2504946C2 |
| ШАРНИРНАЯ ОПОРА ДЛЯ ПРИВОДА НОЖА | 2012 |
|
RU2609944C2 |
| КОНСТРУКЦИЯ ШАРНИРНО-СОЧЛЕНЕННОЙ УБОРОЧНОЙ ЖАТКИ С ДАТЧИКОМ НАГРУЗКИ | 2014 |
|
RU2662285C2 |
| ПОДАЮЩИЙ БАРАБАН СО СМЕЩАЮЩИМИСЯ В ОСЕВОМ НАПРАВЛЕНИИ ПАЛЬЦАМИ | 2013 |
|
RU2628344C2 |
| МЕХАНИЗМ НАТЯЖЕНИЯ ЛЕНТЫ ТРАНСПОРТЕРА СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ ЖАТКИ | 2012 |
|
RU2607092C2 |
Группа изобретений относится к сельскохозяйственному машиностроению. Система управления нагрузкой на сельскохозяйственной уборочной машине содержит первый датчик нагрузки для определения прикладываемой к сельскохозяйственной уборочной машине первой нагрузки, второй датчик нагрузки для определения прикладываемой к уборочной машине второй нагрузки и электронный блок управления, соединенный с первым и вторым датчиками нагрузки. Электронный блок управления выполнен с возможностью определения разности между первой нагрузкой и второй нагрузкой и либо подъема уборочной приставки, либо остановки сельскохозяйственной уборочной машины или и того и другого, когда разность превышает пороговую нагрузку. Использование системы и способа управления нагрузкой на сельскохозяйственной уборочной машине уменьшает риск столкновений уборочной приставки с землей. 2 н. и 16 з.п. ф-лы, 4 ил.
1. Система управления нагрузкой на сельскохозяйственной уборочной машине (100), содержащая:
первый датчик (124, 126, 128, 130) нагрузки, выполненный с возможностью определения первой нагрузки, прикладываемой к сельскохозяйственной уборочной машине;
второй датчик (132, 134, 136, 138) нагрузки, выполненный с возможностью определения второй нагрузки, прикладываемой к сельскохозяйственной уборочной машине (100),
электронный блок (200) управления, соединенный с первым датчиком (124, 126, 128, 130) нагрузки и вторым датчиком (132, 134, 136, 138) нагрузки, при этом электронный блок (200) управления выполнен с возможностью (a) считывания сигнала первой нагрузки с первого датчика нагрузки, (b) считывания сигнала второй нагрузки со второго датчика нагрузки, (c) определения, превышает ли разность между первой нагрузкой и второй нагрузкой пороговую нагрузку, и (d) если разность превышает пороговую нагрузку, либо (i) подъема уборочной приставки (102), либо (ii) остановки движения по земле сельскохозяйственной уборочной машины (100).
2. Система по п. 1, в которой сельскохозяйственная уборочная машина (100) содержит самоходное сельскохозяйственное уборочное транспортное средство (106) и приемную камеру (104), шарнирно соединенную с передней частью самоходного сельскохозяйственного уборочного транспортного средства (106) на первом шарнире (140) и втором шарнире (142).
3. Система по п. 2, в которой первый датчик (124) нагрузки расположен рядом с первым шарниром (140), а второй датчик нагрузки расположен рядом со вторым шарниром (142).
4. Система по п. 2, в которой сельскохозяйственная уборочная машина (100) дополнительно содержит раму (148), при этом рама (148) шарнирно соединена с передней частью приемной камеры на третьем шарнире (150) и четвертом шарнире (152), и кроме того, при этом рама (148) выполнена с возможностью поддержки уборочной приставки (102).
5. Система по п. 4, в которой первый датчик (130) нагрузки расположен рядом с третьим шарниром (150), а второй датчик (138) нагрузки расположен рядом с четвертым шарниром (152).
6. Система по п. 2, в которой сельскохозяйственная уборочная машина (100) дополнительно содержит первый подъемный цилиндр (144) приемной камеры и второй подъемный цилиндр (146) приемной камеры, при этом первый подъемный цилиндр (144) приемной камеры и второй подъемный цилиндр (146) приемной камеры выполнены с возможностью перемещения переднего конца приемной камеры в вертикальном направлении, и кроме того, при этом задний конец первого подъемного цилиндра (144) приемной камеры соединен с самоходным сельскохозяйственным уборочным транспортным средством (106) на третьем шарнире, а задний конец второго подъемного цилиндра (146) приемной камеры соединен с самоходным сельскохозяйственным уборочным транспортным средством (106) на четвертом шарнире.
7. Система по п. 6, в которой первый датчик (126) нагрузки расположен рядом с третьим шарниром, а второй датчик (134) нагрузки расположен рядом с четвертым шарниром.
8. Система по п. 6, в которой первый датчик (128) нагрузки расположен рядом с передним концом первого подъемного цилиндра (144) приемной камеры и в которой второй датчик (136) нагрузки расположен рядом с передним концом второго подъемного цилиндра (146) приемной камеры.
9. Система по п. 1, в которой первый датчик (124, 126, 128, 130) нагрузки выполнен с возможностью определения первой нагрузки, прикладываемой к левой стороне сельскохозяйственной уборочной машины (100), а второй датчик (132, 134, 136, 138) нагрузки выполнен с возможностью определения второй нагрузки, прикладываемой к правой стороне сельскохозяйственной уборочной машины (100).
10. Система по п. 9, в которой первый датчик (124, 126, 128, 130) нагрузки выполнен с возможностью определения первой нагрузки в первом положении с левой стороны сельскохозяйственной уборочной машины (100) и в которой второй датчик (132, 134, 136, 138) нагрузки выполнен с возможностью определения второй нагрузки во втором положении с правой стороны сельскохозяйственной уборочной машины, и кроме того, при этом первое положение и второе положение находятся непосредственно друг напротив друга и равноудалены от проходящей продольно и вертикально плоскости, которая проходит через боковую середину по меньшей мере одного из (a) сельскохозяйственной уборочной машины (100), (b) уборочной приставки (102) и (c) приемной камеры (104).
11. Способ управления нагрузкой на сельскохозяйственной уборочной машине (100), содержащий:
этап автоматического и электронного измерения первой нагрузки, прикладываемой к сельскохозяйственной уборочной машине;
этап автоматического и электронного измерения второй нагрузки, прикладываемой к сельскохозяйственной уборочной машине;
этап автоматического и электронного определения, превышает ли разность величины между первой нагрузкой и второй нагрузкой пороговую нагрузку;
этап автоматического и электронного (a) подъема сельскохозяйственной уборочной приставки (102) или (b) остановки движения по земле сельскохозяйственной уборочной машины (100), когда разность величины между первой нагрузкой и второй нагрузкой превышает пороговую нагрузку.
12. Способ по п. 11, в котором этап автоматического и электронного измерения первой нагрузки, прикладываемой к сельскохозяйственной уборочной машине (100), содержит этап автоматического и электронного измерения первой нагрузки в первом местоположении, находящемся с левой стороны сельскохозяйственной уборочной машины (100), и в котором этап автоматического и электронного измерения второй нагрузки, прикладываемой к сельскохозяйственной уборочной машине (100), содержит этап автоматического и электронного измерения второй нагрузки во втором местоположении, находящемся с правой стороны сельскохозяйственной уборочной машины (100).
13. Способ по п. 12, в котором первое местоположение и второе местоположение находятся непосредственно друг напротив друга и равноудалены от проходящей продольно и вертикально плоскости, проходящей через боковую середину по меньшей мере одного из (a) сельскохозяйственной уборочной машины (100), (b) уборочной приставки (102) и (c) приемной камеры (104).
14. Способ по п. 11, в котором сельскохозяйственная уборочная машина (100) содержит самоходное сельскохозяйственное уборочное транспортное средство (106) и приемную камеру (104), соединенную с самоходным сельскохозяйственным уборочным транспортным средством (106) и выступающую вперед из него, в котором первую нагрузку измеряют в местоположении рядом с левой стороной приемной камеры (104) и в котором вторую нагрузку измеряют в местоположении рядом с правой стороной приемной камеры (104).
15. Способ по п. 14, в котором первую нагрузку измеряют в местоположении рядом с левой стороной приемной камеры (104) на переднем конце приемной камеры (104) и в котором вторую нагрузку измеряют в местоположении рядом с правой стороной приемной камеры (104) на переднем конце приемной камеры (104).
16. Способ по п. 14, в котором первую нагрузку измеряют в местоположении рядом с левой стороной приемной камеры (104) на заднем конце приемной камеры (104) и в котором вторую нагрузку измеряют в местоположении рядом с правой стороной приемной камеры (104) на заднем конце приемной камеры (104).
17. Способ по п. 14, в котором первую нагрузку измеряют на переднем конце левостороннего подъемного цилиндра (144) приемной камеры и в котором вторую нагрузку измеряют на переднем конце правостороннего подъемного цилиндра (146) приемной камеры.
18. Способ по п. 14, в котором первую нагрузку измеряют на заднем конце левостороннего подъемного цилиндра (144) приемной камеры и в котором вторую нагрузку измеряют на заднем конце правостороннего подъемного цилиндра (146) приемной камеры.
| СПОСОБ ФОРМИРОВАНИЯ ОБЛАСТИ ОБНАРУЖЕНИЯ-ОЦЕНИВАНИЯ ЧАСТОТЫ СИГНАЛА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2743961C1 |
| US 6951514 B1, 04.10.2005 | |||
| МЕХАНИЗМ НАВЕСКИ ЖАТКИ НА САМОХОДНУЮ МОЛОТИЛКУ | 1991 |
|
RU2021670C1 |
| Жатка | 1989 |
|
SU1709942A1 |
| Жатвенная часть зерноуборочного комбайна | 1988 |
|
SU1623578A1 |

