Изобретение относится к способу и устройству для контроля состояния обмотки трансформатора, прежде всего для контроля, по меньшей мере, отношения числа витков обмоток трансформатора.
Трансформатор является одной из самых дорогостоящих электрических деталей, которая необходима в многочисленных электрических областях применения. Так, например, силовые трансформаторы используются при выработке и распределении электрической мощности.
Желательно во время работы трансформатора контролировать состояние трансформатора. Например, параметры трансформатора могут контролироваться для заблаговременного распознавания неисправностей или грозящего выхода из строя и, таким образом, минимизировать риск выхода из строя.
ЕР 2474832 А2 раскрывает способ контроля состояния трансформатора, включающий в себя вычисление эффективного отношения числа витков обмоток трансформатора, основываясь на первичном электрическом параметре, который ассоциирован с первичной обмоткой трансформатора, и вторичном электрическом параметре, который ассоциирован с вторичной обмоткой трансформатора, дополнительно включающий в себя вычисление обусловленного эксплуатационными требованиями тока намагничивания, основываясь на эффективном отношении числа витков обмоток трансформатора и первичном и вторичном токе трансформатора или первичном и вторичном напряжении трансформатора и определении показателя здоровья обмоток, по меньшей мере, частично основываясь на обусловленном эксплуатационными требованиями токе намагничивания. Описанный в документе способ требует определения так называемой программы моделирования отношения числа витков обмоток трансформатора, которая должна создаваться для определенного числа известных нагрузок с помощью экспериментов и/или моделирований. При этом подобные эксперименты и/или моделирования должны проводиться для каждого нового трансформатора, что является длительным по времени и дорогостоящим. Кроме того, описанный в документе способ ограничен трансформаторами с одной первичной обмоткой и одной вторичной обмоткой. Раскрытый способ требует, однако, установившегося состояния и требует для надежного результата предпочтительно несколько периодов гармонического сигнала.
Возникает техническая проблема создания способа и устройства для контроля трансформатора, прежде всего контроля, по меньшей мере, отношения числа витков обмоток трансформатора, которые делают возможным надежный, быстрый, простой и неограниченный контроль работоспособности трансформатора.
Решение технической проблемы получается посредством предметов изобретения с признаками п.п. 1 и 12 формулы изобретения. Другие предпочтительные варианты осуществления изобретения следуют из зависимых пунктов формулы изобретения.
Предлагается способ контроля состояния по меньшей мере одной обмотки трансформатора. Прежде всего предлагается способ контроля, по меньшей мере, отношения числа витков обмоток трансформатора. Это делает возможным контроль работоспособности трансформатора. При этом трансформатор может иметь одну первичную обмотку и одну вторичную обмотку или несколько вторичных обмоток. Трансформатор может также иметь магнитный сердечник, вокруг которого расположены первичная обмотка и/или вторичная обмотка (обмотки).
Основной идеей изобретения является определение параметров модели «ток-напряжение» трансформатора, причем контроль состояние трансформатора проводят в зависимости от этих основанных на модели параметров. Например, на основе модели может быть определена магнитная связь по меньшей мере между подлежащей контролю обмоткой и по меньшей мере одной другой обмоткой трансформатора, причем контроль состояния трансформатора проводят в зависимости от определенной на основе модели магнитной связи.
В предлагаемом способе определяют реальный ток обмотки по меньшей мере одной подлежащей контролю обмотки и реальное изменение тока обмотки по меньшей мере одной из подлежащих контролю обмоток. При этом ток обмотки описывает протекающий через подлежащую контролю обмотку ток во время работы трансформатора. Помимо этого определяют реальное напряжение обмотки по меньшей мере одной подлежащей контролю обмотки. При этом напряжение обмотки описывает падающее во время работы на выводах обмотки напряжение.
При этом «реальный» означает, что подлежащая определению величина действительно физически установилась в/на подлежащей контролю обмотке. Определение реального тока обмотки, реального изменения тока обмотки и реального напряжения обмотки при этом включает в себя прямую регистрацию или измерение этих величин, например, посредством датчиков тока или напряжения. Также определение включает в себя косвенные вычисления реального тока обмотки, реального изменения тока обмотки и реального напряжения обмотки, например, в зависимости от непосредственно зарегистрированных, например измеренных, величин, которые отличаются от соответственно измеренных величин. При косвенных расчетах подлежащая определению величина вычисляется или оценивается в зависимости от величины, отличающейся по меньшей мере от одной подлежащей определению величины. Так, например, изменение тока обмотки определяют в зависимости от изменения во времени измеренного тока обмотки, например, посредством дифференцирования.
Прежде всего реальный ток обмотки может быть измеренным током обмотки, реальное изменение тока обмотки - измеренным изменением тока обмотки, и реальной напряжение обмотки - измеренным напряжением обмотки.
Помимо этого определяют по меньшей мере один подлежащий контролю параметр трансформатора. Контролируемый параметр при этом может быть характерным для обмотки параметром подлежащей контролю обмотки.
Согласно изобретению в качестве подлежащего контролю параметра (параметров) определяют по меньшей мере один зависящий от сопротивления по меньшей мере одной подлежащей контролю обмотки параметр и/или по меньшей мере один зависящий от собственной индуктивности и/или взаимной индуктивности по меньшей мере одной подлежащей контролю обмотки параметр. Подлежащий контролю параметр определяют в зависимости от динамической модели «ток-напряжение» трансформатора.
С помощью динамической модели «ток-напряжение» трансформатора может быть, например, определено оценочное напряжение обмотки по меньшей мере одной контролируемой обмотки в зависимости от контролируемого параметра (параметров), а также в зависимости от реального тока обмотки и реального изменения тока обмотки и реального напряжения обмотки (см. формулу 1). Подлежащим контролю параметром (параметрами) может быть коэффициент реального тока обмотки или реального изменения тока обмотки или реального напряжения обмотки или образовывать частичную величину для вычисления подобного коэффициента. Прежде всего подлежащий контролю параметр является коэффициентом реального изменения тока обмотки или частичной величиной коэффициента реального изменения тока обмотки. Динамическая модель «ток-напряжение» при этом может учитывать конструкцию трансформатора, прежде всего число имеющихся обмоток. Может быть необходимым, что для определения подлежащего контролю параметра (параметров) дополнительно должна быть определена другая реальная величина, например реальное напряжение обмотки, другой обмотки, реальный ток обмотки другой обмотки и/или реальное изменение тока обмотки другой обмотки.
Контроль проводят в зависимости от контролируемого параметра (параметров), например, в зависимости от изменения во времени подлежащего контролю параметра (параметров).
Сопротивление обмотки по меньшей мере одной подлежащей контролю обмотки может быть зависящим от сопротивления обмотки по меньшей мере одной подлежащей контролю обмотки параметром. Таким образом, в этом случае подлежащий контролю параметр является сопротивлением обмотки.
Альтернативно сопротивление по меньшей мере одной подлежащей контролю обмотки может образовывать частичную величину подлежащего контролю параметра. В этом случае для определения подлежащего контролю параметра может быть необходима по меньшей мере одна другая частичная величина или частичная информация, которая, прежде всего может отличаться от сопротивления обмотки подлежащей контролю обмотки.
Соответственно собственная индуктивность или взаимная индуктивность по меньшей мере одной подлежащей контролю обмотки может быть параметром, зависящим от собственной индуктивности и/или взаимной индуктивности по меньшей мере одной подлежащей контролю обмотки. Таким образом, в этом случае подлежащий контролю параметр является собственной индуктивностью или взаимной индуктивностью.
Альтернативно собственная индуктивность или взаимная индуктивность по меньшей мере одной подлежащей контролю обмотки может образовывать частичную величину подлежащего контролю параметра. В этом случае может быть необходима по меньшей мере одна другая частичная величина или частичная информация, которая может отличаться от собственной индуктивности или взаимной индуктивности подлежащей контролю обмотки, чтобы определять подлежащий контролю параметр. Предпочтительно, как собственная индуктивность, так и взаимная индуктивность образуют частичные величины подлежащего контролю параметра, причем подлежащий контролю параметр может определяться в зависимости от этих частичных величин или, при определенных условиях, от других частичных величин или частичной информации.
Взаимная индуктивность по меньшей мере одной подлежащей контролю обмотки обозначает получающуюся из взаимной индуктивности между по меньшей мере одной подлежащей контролю обмоткой и другой обмоткой трансформатора индуктивность. Следовательно, взаимная индуктивность может быть также обозначена как коэффициент магнитной связи между по меньшей мере одной подлежащей контролю обмоткой и другой обмоткой трансформатора или этот коэффициент магнитной связи может зависеть от взаимной индуктивности. Таким образом, в этом случае под понятием «коэффициент магнитной связи» понимается зависящий от взаимной индуктивности коэффициент.
Однако в духе изобретения под понятием «коэффициент магнитной связи» может также пониматься зависящий как от взаимной индуктивности, так и от собственной индуктивности по меньшей мере одной подлежащей контролю обмотки коэффициент.
Следовательно, этим описанным вариантом осуществления описывается также способ контроля состояния трансформатора, причем определяют реальный ток обмотки по меньшей мере одной подлежащей контролю обмотки, реальное изменение тока обмотки по меньшей мере одной подлежащей контролю обмотки и реальное напряжение обмотки по меньшей мере одной подлежащей контролю обмотки и по меньшей мере один подлежащий контролю параметр трансформатора.
Помимо этого в качестве подлежащего контролю параметра определяют по меньшей мере один коэффициент магнитной связи в зависимости от динамической модели «ток-напряжение» трансформатора, который описывает магнитную связь между подлежащей контролю обмоткой и по меньшей мере одной другой обмоткой трансформатора. При этом может быть необходимым, что дополнительно должен быть определен реальный ток обмотки или реальное изменение тока обмотки по меньшей мере одной другой обмотки, которая через коэффициент магнитной связи связана с подлежащей контролю обмоткой. Этот ток обмотки или изменение тока обмотки в свою очередь может регистрироваться непосредственно или рассчитываться опосредовано.
Помимо этого проводят предлагаемый контроль в зависимости по меньшей мере от одного коэффициента магнитной связи, например, в зависимости от изменения во времени коэффициента связи.
Предложенный способ основывается, таким образом, непосредственно на физических свойствах трансформатора, которые отражаются в динамической модели «ток-напряжение». Поскольку используется динамическая модель «ток-напряжение» трансформатора, то способ может осуществляться в любом произвольном рабочем состоянии трансформатора, прежде всего при любом изменении во времени тока/напряжения. Прежде всего проведение способа возможно не только в установившихся рабочих режимах трансформатора.
Прежде всего не является необходимым, чтобы для контроля установились синусообразные токи и/или напряжения. Посредством динамической модели «ток-напряжение» могут, например, определяться или моделироваться любые изменения во времени тока и/или напряжения. Посредством динамической модели «ток-напряжение» могут прежде всего определяться или моделироваться установившиеся изменения тока и/или напряжения, то есть тока и/или напряжения в установившемся состоянии, а также неустановившиеся изменения тока и/или напряжения, то есть изменения тока и/или напряжения в неустановившемся состоянии.
Изобретение основано на идее, что изменение состояния трансформатора, прежде всего отношения числа витков обмоток трансформатора, обуславливает изменение параметров в динамической модели «ток-напряжение», и контроль может проводиться в зависимости от параметров. Прежде всего изменение состояния трансформатора, особенно отношения числа витков обмоток трансформатора, может также стать причиной изменения магнитной связи между двумя обмотками. Поскольку коэффициент магнитной связи описывает или отображает эту магнитную связь, то контроль может проводиться в зависимости от коэффициента магнитной связи.
За счет этого предпочтительным образом обеспечивается простой контроль состояния трансформатора, который применим в любом рабочем состоянии, прежде всего для любых изменений во времени токов обмоток и напряжений обмоток. Помимо этого предпочтительным образом получается, что предложенный способ может быть реализован как, например, функция программного обеспечения в устройстве обработки данных, например, в процессоре. Таким образом, способ простым образом может быть интегрирован в управляемую устройством обработки данных схему, которая, например, содержит трансформатор и подключенный к нему выпрямитель. Предлагаемый способ также предпочтительным образом не требует дополнительных датчиков кроме тех, которые обычно имеются в наличии. Таким образом, его использование не создает дополнительных затрат. Помимо этого предпочтительным образом получается, что способ может быть проведен по времени быстро, благодаря чему возможно заблаговременное обнаружение изменения и, таким образом, также возможно чреватого риском состояния трансформатора. Раскрытый в упомянутом в начале ЕР 2474832 А2 способ требует, однако, несколько периодов сигнала в установившемся состоянии, прежде чем будет доступен результат.
В еще одном варианте осуществления в качестве подлежащего контролю параметра (параметров) определяют эффективное сопротивление и/или эффективную индуктивность по меньшей одной подлежащей контролю обмотки. При этом эффективное сопротивление обозначает сопротивление электрической цепи между выводами по меньшей мере одной подлежащей контролю обмотки. При этом электрическая цепь включает в себя, наряду по меньшей мере с одной подлежащей контролю обмоткой, также по меньшей мере одну другую обмотку, предпочтительно все другие обмотки, трансформатора, которые могут быть трансформированы к стороне подлежащей контролю обмотки.
Эффективное сопротивление этой электрической цепи между выводами при этом в дополнение к сопротивлению подлежащей контролю обмотки зависит также от сопротивления по меньшей мере одной другой обмотки, предпочтительно всех других обмоток. Прежде всего эффективное сопротивление может быть суммой сопротивления по меньшей мере одной подлежащей контролю обмотки и трансформированных к стороне по меньшей мере одной подлежащей контролю обмотки сопротивлений других обмоток трансформатора. Образно говоря, эффективное сопротивление обмотки представляет собой сопротивление, которое видят, если смотрят от выводов по меньшей мере одной подлежащей контролю обмотки, когда заглядывают в трансформатор.
Эффективная индуктивность обозначает соответственно индуктивность электрической цепи между выводами по меньшей мере одной подлежащей контролю обмотки. При этом эффективная индуктивность между выводами зависит, в дополнение к собственной индуктивности подлежащей контролю обмотки, также от взаимной индуктивности между по меньшей мере одной подлежащей контролю обмоткой и по меньшей мере одной другой обмоткой трансформатора. Образно говоря, эффективная индуктивность представляет собой индуктивность, которую видят, если смотрят от выводом по меньшей мере одной подлежащей контролю обмотки, когда заглядывают в трансформатор. Эффективное сопротивление и эффективная индуктивность для примера обозначены в формуле 3 параметрами R[] и L[].
Определение этих эффективных параметров может быть предпочтительным образом реализовано вычислительными средствами просто и надежно и, таким образом, делает возможным достоверный и надежный контроль.
В одном альтернативном варианте осуществления в качестве подлежащего контролю параметра в зависимости от динамической модели «ток-напряжение» трансформатора определяют по меньшей мере один коэффициент магнитной связи, который описывает магнитную связь между по меньшей мере одной подлежащей контролю обмоткой и по меньшей мере одной другой обмоткой трансформатора, причем контроль проводят в зависимости по меньшей мере от одного коэффициента магнитной связи. Это уже было разъяснено выше.
В еще одном варианте осуществления в зависимости от динамической модели «ток-напряжение» трансформатора в качестве подлежащего контролю параметра (параметров) дополнительно определяют собственную индуктивность подлежащей контролю обмотки и/или сопротивление подлежащей контролю обмотки, причем контроль проводят дополнительно в зависимости от собственной индуктивности и/или сопротивления обмотки.
Благодаря использованию этого дополнительного параметра предпочтительным образом обеспечивается более чувствительный и, таким образом, улучшенный контроль состояния трансформатора.
В еще одном варианте осуществления в зависимости от динамической модели «ток-напряжение» трансформатора определяют оценочное напряжение обмотки подлежащей контролю обмотки, причем подлежащий контролю параметр (параметры) определяют так, что разность между оценочным напряжением обмотки и реальным напряжения обмотки является минимальной.
Оценочное напряжение обмотки может определяться, например, в зависимости от реального тока обмотки, реального изменения витков обмотки, сопротивления обмотки, собственной индуктивности, а также коэффициентов магнитной связи с другими обмотками, как и соответствующих реальных изменений тока обмотки в этих других обмотках. Прежде всего оценочное напряжение обмотки определяют на основании динамической модели «ток-напряжение».
В этом случае контролируемые параметры подлежащей контролю обмотки могут быть переменными задачи оптимизации, причем разность между оценочным напряжением обмотки и определенным напряжением обмотки или возведенная в квадрат разность между оценочным напряжением обмотки и реальным напряжением обмотки может быть так называемой функцией стоимости задачи оптимизации.
При этом разность может определяться в нескольких следующие друг за другом моментах времени, например, в нескольких моментах выборки, благодаря чему предпочтительным образом могут быть созданы несколько уравнений для решаемой системы линейных уравнений. При этом уже достаточно определение разности в двух следующих друг за другом моментах времени.
В еще одном варианте осуществления в зависимости от динамической модели «ток-напряжение» трансформатора определяют оценочное напряжение обмотки первой подлежащей контролю обмотки и оценочное напряжение обмотки другой подлежащей контролю обмотки, причем подлежащие контролю параметры первой и другой подлежащих контролю обмоток определяют так, что разность между оценочным напряжением обмотки первой подлежащей контролю обмотки и другой подлежащей контролю обмотки является минимальной. При этом, следовательно, разность между оценочными напряжениями обмотки первой и другой подлежащих контролю обмоток или возведенная в квадрат разность между оценочными напряжениями обмоток образует функцию стоимости задачи оптимизации, причем подлежащий контролю параметр снова является переменной задачи оптимизации.
Если трансформатор имеет более чем две обмотки, то может быть необходимым, что определяются, например, непосредственно измеряются или опосредовано вычисляются также реальные токи обмотки или изменения тока обмотки оставшихся, не контролируемых обмоток.
Подлежащие определению в описанных вариантах осуществления параметры включают в себя, таким образом, по меньшей мере коэффициенты магнитной связи между первой и другой подлежащей контролю обмоткой. Помимо этого подлежащие определению параметры могут включать в себя собственные индуктивности подлежащих контролю обмоток, а также сопротивления подлежащих контролю обмоток. Если несколько обмоток содержатся в трансформаторе в качестве подлежащих контролю обмоток, то подлежащие определению параметры могут включать в себя также коэффициенты магнитной связи подлежащих контролю обмоток с не контролируемыми обмотками.
В одном предпочтительном варианте осуществления проводят определение подлежащих контролю параметров первой и других подлежащих контролю параметров в зависимости от известных отношений витков первой и другой подлежащей контролю обмотки. Если трансформатор содержит больше, чем подлежащая контролю, обмоток, то определение параметров может быть дополнительно проведено в зависимости от других известных отношений числа витков обмоток, которые описывают соответствующие отношения числа витков между обмотками трансформатора.
Известное отношение (отношения) витков обмоток при этом может быть, например, идеальным отношением (отношениями) витков обмоток в безупречном состоянии трансформатора или отношением (отношениями) витков обмоток согласно спецификации трансформатора.
За счет этого предпочтительным образом получается значительное упрощение вычисления или определения подлежащих определению параметров, так как, например, реальный ток обмотки первой подлежащей контролю обмотки может быть выражен в зависимости от реального тока обмотки другой подлежащей контролю обмотки. В этом случае, следовательно, реальный ток обмотки первой обмотки может быть опосредовано вычислен в зависимости от непосредственно зарегистрированного тока обмотки другой обмотки. Поэтому также не требуется непосредственно регистрировать ток обмотки первой подлежащей контролю обмотки, например, измерять.
В еще одном варианте осуществления первая подлежащая контролю обмотка является первичной обмоткой трансформатора, а другая подлежащая контролю обмотка является вторичной обмоткой трансформатора. Можно также представить, что первая подлежащая контролю обмотка является первой вторичной обмоткой, а другая подлежащая контролю обмотка является другой вторичной обмоткой трансформатора.
За счет этого предпочтительным образом реализуется гибкий контроль разных обмоток трансформатора.
В еще одном варианте осуществления в зависимости от модели «ток-напряжение» трансформатора в качестве первого члена формулы определяют разность между оценочным напряжением обмотки по меньшей мере одной подлежащей контролю обмотки и оценочным напряжением обмотки другой обмотки трансформатора. Другая обмотка при этом может быть другой подлежащей контролю обмоткой. Разность может определяться в зависимости от описанных выше эффективного сопротивления и эффективной индуктивности (см. формулу 3). Также в зависимости от динамической модели «ток-напряжение» трансформатора можно определять оценочное напряжение обмотки по меньшей мере одной подлежащей контролю обмотки и оценочное напряжение обмотки другой обмотки, и затем определять разность.
Помимо этого в качестве второго члена формулы определяют разность между реальным напряжением обмотки по меньшей мере одной подлежащей контролю обмотки и реальным напряжение обмотки другой обмотки трансформатора. Например, могут быть определены реальное напряжение обмотки по меньшей мере одной подлежащей контролю обмотки и реальное напряжение обмотки другой обмотки, и затем определена разность.
Подлежащий контролю параметр (параметры) определяют таким образом, что разность между вторым членом формулы и первым членом формулы является минимальной. Таким образом, первый член формулы может быть обозначен как вычитаемое, а второй член формулы - как уменьшаемое. Таким образом, при этом разность или возведенная в квадрат разность между разностью реальных напряжений обмоток и разностью оценочных напряжений обмоток может образовывать функцию стоимости задачи оптимизации, причем подлежащими контролю параметрами снова являются переменные задачи оптимизации. Эта задача оптимизации может быть решена, например, способом наименьших квадратов, благодаря чему возможно простое, явное и проводимое исключительно в зависимости от алгебраических операций определение подлежащего контролю параметра (параметров).
Также и в этом варианте осуществления может быть проведено определение подлежащего контролю параметра в зависимости от известных отношений числа витков по меньшей мере одной подлежащей контролю обмотки и другой обмотки. Помимо этого по меньшей мере одна подлежащая контролю обмотка может быть первичной обмоткой трансформатора, а другая обмотка - вторичной обмоткой трансформатора. Разумеется, возможна также обратная конфигурация или конфигурации с другими (вторичными) обмотками.
В еще одном варианте осуществления трансформатор содержит более чем две обмотки, причем контроль проводят для каждой обмотки. При этом, например, реальный ток обмотки, реальное изменение тока обмотки и реальной напряжение обмотки для каждой из обмоток могут быть зарегистрированы непосредственно, например измерены, или вычислены опосредовано. Тогда в зависимости от этих реальных величин могут быть, например, вычислены или оценены оценочные напряжения обмотки, прежде всего в зависимости от динамической модели «ток-напряжение», причем в зависимости от этих оценочных напряжений обмоток могут быть затем определены в рамках решения задачи оптимизации подлежащие контролю параметры.
За счет этого предпочтительным образом получается простой и эффективный контроль всех обмоток трансформатора.
В еще одном варианте осуществления контроль проводят в зависимости от разности между по меньшей мере одним определенным согласно изобретению параметром и соответствующим эталонным параметром. Соответствующий эталонный параметр может быть, например, соответствующим параметром в безупречном состоянии трансформатора, который, например, может быть определен при испытательном запуске в работу. Если разность больше заранее определенного порогового значения, то может быть выработан предупредительный сигнал или сигнал дефекта, благодаря чему может быть оповещен пользователь и/или соответствующим образом приведена в соответствие, например прекращена, работа трансформатора.
Альтернативно контроль может проводиться в зависимости от разности между первым определенным согласно изобретению параметром и по меньшей мере одним другим определенным согласно изобретению параметром. Например, в случае симметрично устроенного трансформатора, у которого, например, число витков первичной обмотки соответствует числу витков вторичной обмотки, коэффициент связи, который описывает магнитную связь между первичной обмоткой и вторичной обмоткой, может быть равен коэффициенту магнитной связи, который описывает магнитную связь вторичной обмотки с первичной обмоткой. Если разность этих определенных согласно изобретению коэффициентов связи превышает, например, заранее определенное пороговое значение, то, согласно предыдущему описанию, может быть выработан предупредительный сигнал или сигнал дефекта.
Альтернативно контроль может проводиться в зависимости от разности между определенным согласно изобретению в первый момент времени параметром и определенным согласно изобретению в более поздний момент времени соответствующим параметром. За счет этого могут быть, например, обнаружены изменения во времени определенного согласно изобретению в разные моменты времени параметра. Если разность превышает, например, заранее определенное пороговое значение, то, как описано выше, может быть выработан предупредительный сигнал или сигнал дефекта.
Благодаря этому предпочтительным образом получается простая и надежная выработка предупредительного сигнала или сигнала дефекта.
Помимо этого предлагается устройство для контроля трансформатора, прежде всего контроля по меньшей мере одного отношения витков обмоток трансформатора. Устройство содержит средства для определения реального тока обмотки по меньшей мере одной подлежащей контролю обмотки, средство для определения реального изменения тока обмотки по меньшей мере одной подлежащей контролю обмотки, средство для определения реального напряжения обмотки по меньшей мере одной подлежащей контролю обмотки и устройство обработки данных. Средства для определения реального тока обмотки, реального изменения тока обмотки и реального напряжения обмотки при этом могут быть частично объединены или сформированы отдельно.
Например, средства могут быть сформированы как датчики для регистрации соответствующих реальных величин, например, реального тока обмотки.
Согласно изобретению посредством устройства обработки данных может в качестве подлежащего контролю параметра (параметров) определяться в зависимости от динамической модели «ток-напряжение» трансформатора по меньшей мере один зависящий от сопротивления обмотки по меньшей мере одной подлежащей контролю обмотки параметр и/или по меньшей мере один зависящий от собственной индуктивности и/или взаимной индуктивности по меньшей мере одной подлежащей контролю обмотки параметр, причем контроль является проводимым в зависимости по меньшей мере от одного подлежащего контролю параметра.
Как уже разъяснено выше, посредством этого предложенного варианта осуществления описано также устройство для контроля состояние трансформатора, причем устройство содержит средство для определения реального тока обмотки по меньшей мере одной подлежащей контролю обмотки, средство для определения реального изменения тока обмотки по меньшей мере одной подлежащей контролю обмотки, средство для определения реального напряжения обмотки по меньшей мере одной подлежащей контролю обмотки и устройство обработки данных, причем посредством устройства обработки данных является определяемым по меньшей мере один подлежащий контролю параметр трансформатора, который описывает магнитную связь между подлежащей контролю обмоткой и по меньшей мере одной другой обмоткой трансформатора. Посредством устройства обработки данных также может проводиться контроль в зависимости по меньшей мере от одного коэффициента магнитной связи.
При этом предлагаемое устройство может также содержать средство для определения реального тока обмотки и/или реального изменения тока обмотки по меньшей мере одной подлежащей контролю обмотки или всех других обмоток трансформатора.
При этом предпочтительным образом получается устройство, посредством которого может проводиться описанный выше способ контроля состояния трансформатора.
В еще одном варианте осуществления посредством устройства обработки данных в качестве подлежащего контролю параметра (параметров) является определяемым эффективное сопротивление и/или эффективная индуктивность по меньшей мере одной подлежащей контролю обмотки. Это предпочтительным образом делает возможным простое в отношении вычислительных средств и надежное определение подлежащего контролю параметра (параметров) и, таким образом, делает возможным достоверный и надежный контроль.
В еще одном варианте осуществления посредством устройства обработки данных в качестве подлежащего контролю параметра (параметров) дополнительно является определяемой собственная индуктивность подлежащей контролю обмотки и/или сопротивление подлежащей контролю обмотки, в то время как осуществляется минимизация разности или возведенной в квадрат разности между оценочным напряжением обмотки подлежащей контролю обмотки и реальным напряжением обмотки подлежащей контролю обмотки, или минимизация разности или возведенной в квадрат разности между оценочным напряжением обмотки первой подлежащей контролю обмотки и оценочным напряжением обмотки другой подлежащей контролю обмотки.
За счет этого предпочтительным образом получается устройство, посредством которого может проводиться простой контроль состояния параметров трансформатора.
Помимо этого будет описан компьютерный программный продукт, в котором или на котором сохранен код для реализации одного из описанных выше способов.
Прежде всего компьютерный программный продукт может содержать компьютерную программу, которая содержит программное средство для реализации одного из описанных выше способов, когда компьютерная программы выполняется в системе автоматизации.
Изобретение будет более подробно описано с помощью двух примеров осуществления. На фигурах показано:
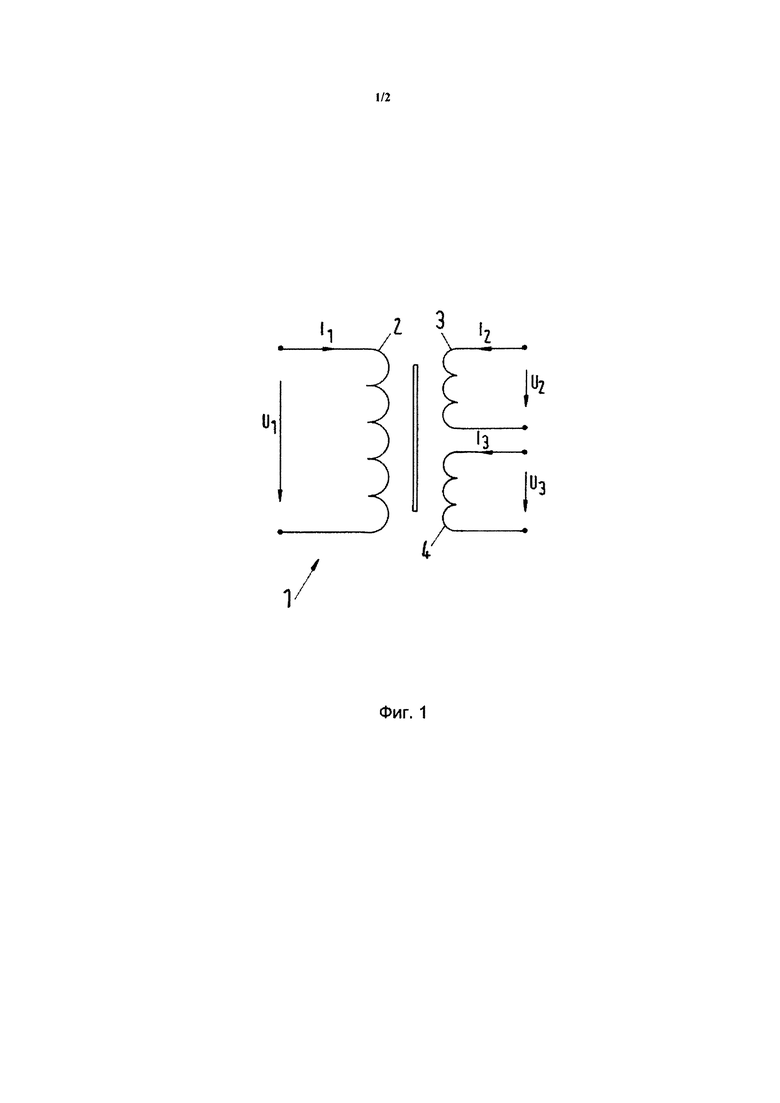
Фиг. 1 схематическое изображение первого трансформатора, и
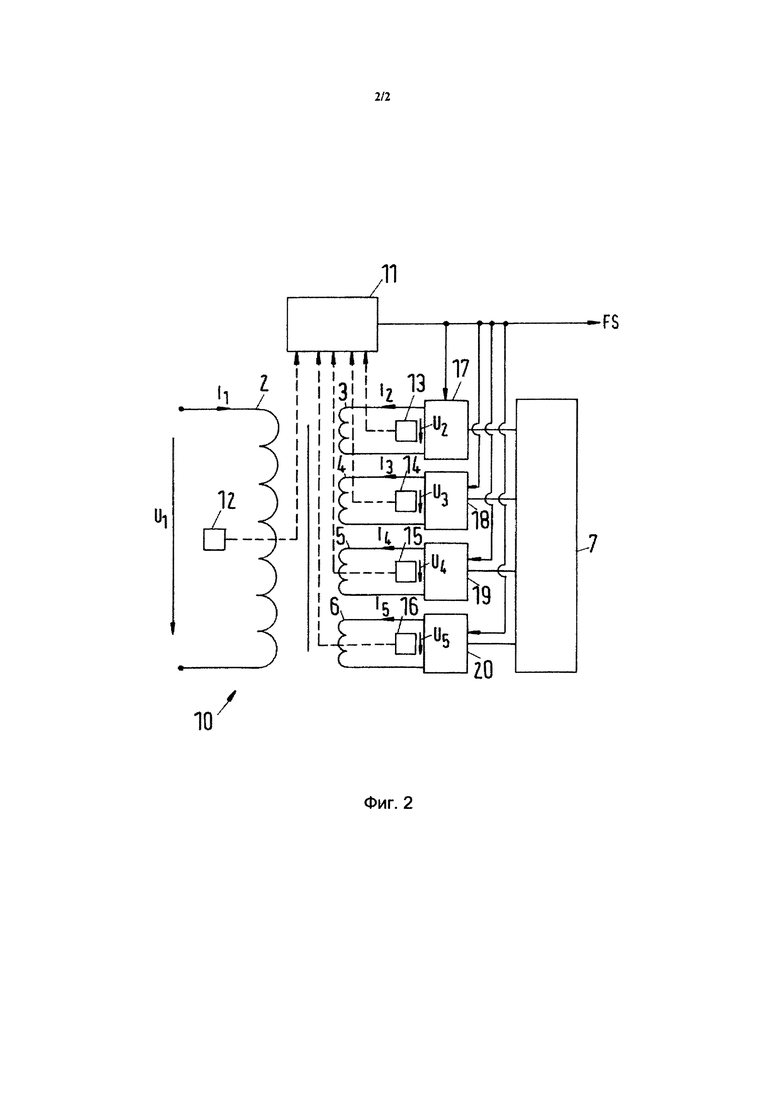
Фиг. 2 схематическое изображение схемы с устройством для контроля состояния другого трансформатора.
В дальнейшем одинаковые ссылочные обозначения указывают на элементы с одинаковыми или похожими техническими признаками.
На фиг. 1 показана принципиальная электрическая схема трансформатора 1. Трансформатор 1 содержит первичную обмотку 2, первую вторичную обмотку 3 и вторую вторичную обмотку 4. Реальный ток обмотки первичной обмотки обозначен через I1, а реальное напряжение обмотки первичной обмотки обозначено через U1. Соответственно, реальные токи обмотки и реальные напряжения обмотки вторичных обмоток 3, 4 обозначены через I2, U2, I3, U3.
Динамическая модель «ток-напряжение» трансформатора 1 может быть выражена следующим уравнением:

причем 




причем Ui обозначает реальное, например измеренное, напряжение обмотки i-й обмотки. Параметры Ri, Li, mik могут быть определены тем, что описанную в формуле 2 ошибку ei возводят в квадрат и параметры определяют так, чтобы эта возведенная в квадрат ошибка ei минимизировалась в течение заранее определенного промежутка времени. Например, в течение заранее определенного промежутка времени в нескольких моментах выборки могут регистрироваться реальные напряжения Ui обмоток и, таким образом, определены возведенные в квадрат ошибки ei, причем параметры определяют так, что сумма возведенных в квадрат ошибок Ui будет минимальной.
Определенные таким образом параметры Ri, Li, mik могут быть затем сравнены с заранее определенными эталонными параметрами, причем их определяют в предварительных испытаниях для показанного на фиг. 1 трансформатора 1. Если получаются отклонения, которые, например, больше заранее определенного порогового значения, то может быть выработан предупредительный сигнал или сигнал дефекта.
Если исходить из того, что число витков первой вторичной обмотки 3 равно числу витков второй вторичной обмотки 4, то полученные таким образом параметры могут также сравниваться друг с другом. Например, может сравниваться разность коэффициента m12 магнитной связи с коэффициентом m13 магнитной связи, причем эти коэффициенты m12, m13 описывают магнитную связь первичной обмотки 2 с первой вторичной обмоткой 3 или со второй вторичной обмоткой 4. Если они отличаются друг от друга на заранее определенную величину, например, разность этих коэффициентов m12, m13 магнитной связи больше, чем заранее определенное пороговое значение, то может быть выработан предупредительный сигнал или сигнал дефекта.
Однако задача оптимизации может быть еще дополнительно упрощена. Если, например, известно заранее определенное отношение числа витков между первичной обмоткой 2 и первой вторичной обмоткой 3, а также первичной обмоткой 2 и второй вторичной обмоткой 4, то разность оценочного напряжения 


где k2 описывает отношение числа витков первичной обмотки 2 к числу витков вторичной обмотки 3, а k3 - отношение числа витков первичной обмотки 2 к числу витков второй вторичной обмотки 4. За счет этого могут быть предпочтительным образом определены подлежащие контролю параметры R1, R2, L1, L2, m12, m13, m23 в зависимости от одного единственного уравнения, благодаря чему облегчается определение параметров средствами вычислительной техники.
Таким образом,

Также возможно, что член R[] может быть обобщенно представлен как видимое со стороны первой вторичной обмотки 3 общее сопротивление трансформатора, а выражение L[] - как видимая со стороны первой вторичной обмотки 3 общая индуктивность трансформатора 1. При этом контроль может проводиться также в зависимости от этого суммарного сопротивления R[] и суммарной индуктивности L[].
Прежде всего ошибка в этом случае может быть представлена как

причем U1 и U2 описывают соответственно реальные, например измеренные, напряжения на первичной обмотке 2 или на первой вторичной обмотке 3. Если измеренных значений одного или обоих напряжение U1, U2 в наличии нет, то заданное значение напряжений U1, U2 обмоток может быть также определено, например, посредством регулятора и использовано. Как описано выше, подлежащие контролю параметры могут быть определены путем минимизации описанной в формуле 4 возведенной в квадрат ошибки е.
Можно решать подобную задачу оптимизации путем дискретизации. Так, например, приведенное в формуле 4 выражение в дискретной форме может быть представлено следующим образом:

причем R[] и L[] обозначают вышеупомянутое общее сопротивление или вышеупомянутую общую индуктивность, и ΔI2,t равно:

причем Ui,t обозначает реальное напряжение обмотки в момент t выборки на i-й обмотке, Ii,t - реальный ток обмотки в момент t выборки через i-ую обмотку и Δt - частоту выборки. Если в некоторые моменты t выборки будут зарегистрированы приведенные в формуле 5 напряжения U1,t, U2,t обмоток, а также приведенный в формуле 5 ток I2,t обмотки первой вторичной обмотки 3, то может быть составлена система линейных уравнений, причем подлежащие контролю параметры могут быть определены как решение системы линейных уравнений. Решение системы линейных уравнений может быть определено как так называемое решение способом наименьших квадратов. Разумеется, аналогичным образом могут быть определены также подлежащие контролю параметры второй вторичной обмотки 4.
На фиг. 2 показана схема 10, которая содержит один трансформатор с одной первичной обмоткой 2 и четырьмя вторичными обмотками 3, 4, 5, 6. Схема содержит, кроме того, устройство 11 обработки данных, которое посредством техники передачи сигналов связано с сенсорными элементами 12, которые регистрируют реальное напряжение U1 обмотки и реальный ток I1 обмотки первичной обмотки 2, а также с сенсорными элементами 13, 14, 15, 16, которые регистрируют соответственно реальные напряжения U2, U3, U4, U5 обмотки, а также реальные токи I2, I3, I4, I5 обмотки вторичных обмоток 3, 4, 5, 6. Устройство обработки данных 11 одновременно служит как управляющее устройство для первого выпрямителя 17, который подключен к первой вторичной обмотке 3, второго выпрямителя 18, который подключен ко второй вторичной обмотке 4, третьего выпрямителя 19, который подключен к третьей вторичной обмотке 5, и четвертого выпрямителя 20, который подключен к четвертой вторичной обмотке 6. На фиг. 2 показано, что к выпрямителями 17, 18, 19, 20 подключена нагрузка 7. При этом показанное на фиг. 2 устройство 11 обработки данных, как разъяснено выше в описании к фиг. 1, может контролировать параметры первичной обмотки 2, а также вторичных обмоток 3, 4, 5, 6, например, тем, что параметры определяются и сравниваются с эталонным параметром. В случае нежелательных отклонений, например если превышено заранее определенное пороговое значение, может быть выработан сигнал FS ошибки и, например, передан на индикаторное устройство.
При этом чувствительность и/или точность предложенного способа могут регулироваться, например, путем изменения продолжительности заранее определенного периода времени, в течение которого минимизируется описанная выше ошибка. Также чувствительность и/или точность могут регулироваться путем подбора пороговых значений для отклонений или разностей между эталонными параметрами и определенными посредством предложенного способа параметрами.
Изобретение относится к контролю трансформаторов с одной первичной и несколькими вторичными обмотками. Технический результат: обеспечение простого, быстрого и надежного контроля состояния трансформатора, применимого в любом рабочем состоянии. Сущность: определяют реальный ток по меньшей мере одной подлежащей контролю обмотки, реальное изменение тока по меньшей мере одной подлежащей контролю обмотки и реальное напряжение обмотки. В качестве подлежащих контролю параметров в зависимости от динамической модели «ток-напряжение» трансформатора, предназначенной для определения оценочного напряжения по меньшей мере одной подлежащей контролю обмотки, определяют эффективное сопротивление и эффективную индуктивность по меньшей мере одной подлежащей контролю обмотки, или в качестве подлежащего контролю параметра определяют по меньшей мере один коэффициент магнитной связи, который описывает магнитную связь между по меньшей мере одной подлежащей контролю обмоткой и по меньшей мере одной другой обмоткой трансформатора. Контроль проводят, сравнивая подлежащие контролю параметры с заранее определенными эталонными параметрами или сравнивая подлежащие контролю параметры друг с другом и вырабатывая предупредительный сигнал или сигнал дефекта при получении отклонения, превышающего заранее определенное пороговое значение. 2 н. и 22 з.п. ф-лы, 2 ил.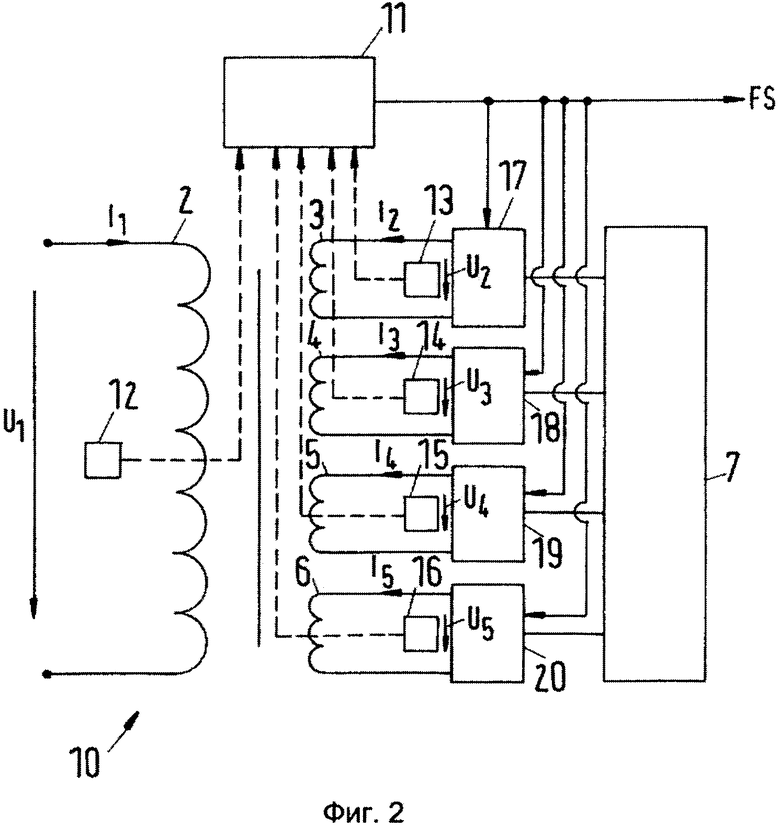
1. Способ контроля состояния трансформатора (1), причем определяют реальный ток (I1, I2, I3, I4, I5) по меньшей мере одной подлежащей контролю обмотки, реальное изменение тока по меньшей мере одной подлежащей контролю обмотки и реальное напряжение (U1, U2, U3, U4, U5) по меньшей мере одной подлежащей контролю обмотки, причем реальный ток (I1, I2, I3, I4, I5) обмотки, реальное изменение тока обмотки и реальное напряжение обмотки физически устанавливается по меньшей мере в/на одной подлежащей контролю обмотке, причем определяют подлежащие контролю параметры трансформатора (1), отличающийся тем, что трансформатор содержит одну первичную обмотку (2) и несколько вторичных обмоток (3, 4, 5, 6), причем в качестве подлежащих контролю параметров в зависимости от динамической модели "ток-напряжение" трансформатора (1), предназначенной для определения оценочного напряжения по меньшей мере одной подлежащей контролю обмотки в зависимости от реального тока обмотки и реального изменения тока обмотки, а также в зависимости от сопротивления по меньшей мере одной подлежащей контролю обмотки, собственной индуктивности по меньшей мере одной подлежащей контролю обмотки и коэффициента магнитной связи между по меньшей мере одной подлежащей контролю обмоткой и другой обмоткой трансформатора, определяют по меньшей мере один параметр, зависящий от сопротивления по меньшей мере одной подлежащей контролю обмотки, и по меньшей мере один параметр, зависящий от собственной индуктивности и взаимной индуктивности по меньшей мере одной подлежащей контролю обмотки, причем в качестве подлежащих контролю параметров определяют эффективное сопротивление и эффективную индуктивность по меньшей мере одной подлежащей контролю обмотки, причем эффективное сопротивление, в дополнение к сопротивлению подлежащей контролю обмотки, зависит также от сопротивления по меньшей мере одной другой обмотки, а эффективная индуктивность, в дополнение к собственной индуктивности подлежащей контролю обмотки, зависит также от взаимной индуктивности между по меньшей мере одной подлежащей контролю обмоткой и по меньшей мере одной другой обмоткой трансформатора, или в качестве подлежащего контролю параметра определяют по меньшей мере один коэффициент магнитной связи, который описывает магнитную связь между по меньшей мере одной подлежащей контролю обмоткой и по меньшей мере одной другой обмоткой трансформатора (1), причем контроль проводят в зависимости от подлежащих контролю параметров, сравнивая подлежащие контролю параметры с заранее определенными эталонными параметрами или сравнивая подлежащие контролю параметры друг с другом и вырабатывая предупредительный сигнал или сигнал дефекта при получении отклонения, превышающего заранее определенное пороговое значение.
2. Способ по п. 1, отличающийся тем, что в зависимости от динамической модели "ток-напряжение" трансформатора (1) в качестве подлежащего контролю параметра (параметров) дополнительно определяют собственную индуктивность подлежащей контролю обмотки и/или сопротивление подлежащей контролю обмотки, причем контроль проводят дополнительно в зависимости от собственной индуктивности и/или сопротивления обмотки.
3. Способ по п. 1 или 2, отличающийся тем, что в зависимости от динамической модели "ток-напряжение" трансформатора (1) определяют оценочное напряжение подлежащей контролю обмотки, причем подлежащий контролю параметр (параметры) определяют так, что разность между оценочным напряжением обмотки и реальным напряжением обмотки (U1, U2, U3, U4, U5) является минимальной.
4. Способ по одному из пп. 1-3, отличающийся тем, что в зависимости от динамической модели "ток-напряжение" трансформатора (1) определяют оценочное напряжение первой подлежащей контролю обмотки и оценочное напряжение другой подлежащей контролю обмотки, причем подлежащие контролю параметры первой и другой подлежащей контролю обмотки определяют так, что разность между оценочными напряжениями первой подлежащей контролю обмотки и другой подлежащей контролю обмотки является минимальной.
5. Способ по п. 4, отличающийся тем, что определение подлежащего контролю параметра первой и другой подлежащей контролю обмотки проводят дополнительно в зависимости от заранее известного отношения числа витков между первой и другой подлежащей контролю обмоткой.
6. Способ по п. 4, отличающийся тем, что первая подлежащая контролю обмотка является первичной обмоткой (2) трансформатора (1), а другая подлежащая контролю обмотка является вторичной обмоткой (3, 4, 5, 6) трансформатора.
7. Способ по п. 5, отличающийся тем, что первая подлежащая контролю обмотка является первичной обмоткой (2) трансформатора (1), а другая подлежащая контролю обмотка является вторичной обмоткой (3, 4, 5, 6) трансформатора.
8. Способ по п. 1 или 2, отличающийся тем, что в зависимости от динамической модели "ток-напряжение" трансформатора (1) в качестве первого члена формулы определяют разность между оценочным напряжением по меньшей мере одной подлежащей контролю обмотки и оценочным напряжением другой обмотки трансформатора, причем в качестве второго члена формулы определяют разность между реальным напряжением по меньшей мере одной подлежащей контролю обмотки и реальным напряжением другой обмотки трансформатора, причем подлежащий контролю параметр (параметры) определяют так, что разность между вторым членом формулы и первым членом формулы является минимальной.
9. Способ по п. 1 или 2, отличающийся тем, что трансформатор (1) содержит более чем две обмотки (2, 3, 4, 5, 6), причем контроль проводят для каждой из обмоток (2, 3, 4, 5, 6).
10. Способ по п. 3, отличающийся тем, что трансформатор (1) содержит более чем две обмотки (2, 3, 4, 5, 6), причем контроль проводят для каждой из обмоток (2, 3, 4, 5, 6).
11. Способ по п. 4, отличающийся тем, что трансформатор (1) содержит более чем две обмотки (2, 3, 4, 5, 6), причем контроль проводят для каждой из обмоток (2, 3, 4, 5, 6).
12. Способ по одному из пп. 5-7, отличающийся тем, что трансформатор (1) содержит более чем две обмотки (2, 3, 4, 5, 6), причем контроль проводят для каждой из обмоток (2, 3, 4, 5, 6).
13. Способ по п. 8, отличающийся тем, что трансформатор (1) содержит более чем две обмотки (2, 3, 4, 5, 6), причем контроль проводят для каждой из обмоток (2, 3, 4, 5, 6).
14. Способ по п. 1 или 2, отличающийся тем, что контроль проводят в зависимости от разности между по меньшей мере одним подлежащим контролю параметром и соответствующим эталонным параметром, или в зависимости от разности между первым подлежащим контролю параметром и по меньшей мере одним другим подлежащим контролю параметром, или в зависимости от разности между определенным в первый момент времени параметром и определенным в более поздний момент времени соответствующим параметром.
15. Способ по п. 3, отличающийся тем, что контроль проводят в зависимости от разности между по меньшей мере одним подлежащим контролю параметром и соответствующим эталонным параметром, или в зависимости от разности между первым подлежащим контролю параметром и по меньшей мере одним другим подлежащим контролю параметром, или в зависимости от разности между определенным в первый момент времени параметром и определенным в более поздний момент времени соответствующим параметром.
16. Способ по п. 4, отличающийся тем, что контроль проводят в зависимости от разности между по меньшей мере одним подлежащим контролю параметром и соответствующим эталонным параметром, или в зависимости от разности между первым подлежащим контролю параметром и по меньшей мере одним другим подлежащим контролю параметром, или в зависимости от разности между определенным в первый момент времени параметром и определенным в более поздний момент времени соответствующим параметром.
17. Способ по одному из пп. 5-7, отличающийся тем, что контроль проводят в зависимости от разности между по меньшей мере одним подлежащим контролю параметром и соответствующим эталонным параметром, или в зависимости от разности между первым подлежащим контролю параметром и по меньшей мере одним другим подлежащим контролю параметром, или в зависимости от разности между определенным в первый момент времени параметром и определенным в более поздний момент времени соответствующим параметром.
18. Способ по п. 8, отличающийся тем, что контроль проводят в зависимости от разности между по меньшей мере одним подлежащим контролю параметром и соответствующим эталонным параметром, или в зависимости от разности между первым подлежащим контролю параметром и по меньшей мере одним другим подлежащим контролю параметром, или в зависимости от разности между определенным в первый момент времени параметром и определенным в более поздний момент времени соответствующим параметром.
19. Способ по п. 9, отличающийся тем, что контроль проводят в зависимости от разности между по меньшей мере одним подлежащим контролю параметром и соответствующим эталонным параметром, или в зависимости от разности между первым подлежащим контролю параметром и по меньшей мере одним другим подлежащим контролю параметром, или в зависимости от разности между определенным в первый момент времени параметром и определенным в более поздний момент времени соответствующим параметром.
20. Способ по п. 10 или 11, отличающийся тем, что контроль проводят в зависимости от разности между по меньшей мере одним подлежащим контролю параметром и соответствующим эталонным параметром, или в зависимости от разности между первым подлежащим контролю параметром и по меньшей мере одним другим подлежащим контролю параметром, или в зависимости от разности между определенным в первый момент времени параметром и определенным в более поздний момент времени соответствующим параметром.
21. Способ по п. 12, отличающийся тем, что контроль проводят в зависимости от разности между по меньшей мере одним подлежащим контролю параметром и соответствующим эталонным параметром, или в зависимости от разности между первым подлежащим контролю параметром и по меньшей мере одним другим подлежащим контролю параметром, или в зависимости от разности между определенным в первый момент времени параметром и определенным в более поздний момент времени соответствующим параметром.
22. Способ по п. 13, отличающийся тем, что контроль проводят в зависимости от разности между по меньшей мере одним подлежащим контролю параметром и соответствующим эталонным параметром, или в зависимости от разности между первым подлежащим контролю параметром и по меньшей мере одним другим подлежащим контролю параметром, или в зависимости от разности между определенным в первый момент времени параметром и определенным в более поздний момент времени соответствующим параметром.
23. Устройство для контроля состояния трансформатора (1), содержащее средство для определения реального тока (I1, I2, I3, I4, I5) по меньшей мере одной подлежащей контролю обмотки, средство для определения реального изменения тока по меньшей мере одной подлежащей контролю обмотки, средство для определения реального напряжения (U1, U2, U3, U4, U5) по меньшей мере одной подлежащей контролю обмотки и устройство (11) обработки данных, выполненное с возможностью определения подлежащих контролю параметров трансформатора, причем реальный ток (I1, I2, I3, I4, I5) обмотки, реальное изменение тока обмотки и реальное напряжение обмотки физически устанавливается по меньшей мере в/на одной подлежащей контролю обмотке, отличающееся тем, что трансформатор содержит одну первичную обмотку (2) и несколько вторичных обмоток (3, 4, 5, 6), причем посредством устройства (11) обработки данных в качестве подлежащих контролю параметров в зависимости от динамической модели "ток-напряжение" трансформатора (1), предназначенной для определения оценочного напряжения по меньшей мере одной подлежащей контролю обмотки в зависимости от реального тока обмотки и реального изменения тока обмотки, а также в зависимости от сопротивления по меньшей мере одной подлежащей контролю обмотки, собственной индуктивности по меньшей мере одной подлежащей контролю обмотки и коэффициента магнитной связи между по меньшей мере одной подлежащей контролю обмоткой и другой обмоткой трансформатора определяется по меньшей мере один параметр, зависящий от сопротивления обмотки по меньшей мере одной подлежащей контролю обмотки, и по меньшей мере один параметр, зависящий от собственной индуктивности и взаимной индуктивности по меньшей мере одной подлежащей контролю обмотки, причем в качестве подлежащих контролю параметров определяются эффективное сопротивление и эффективная индуктивность по меньшей мере одной подлежащей контролю обмотки, причем эффективное сопротивление, в дополнение к сопротивлению подлежащей контролю обмотки, зависит также от сопротивления по меньшей мере одной другой обмотки, а эффективная индуктивность, в дополнение к собственной индуктивности подлежащей контролю обмотки, зависит также от взаимной индуктивности между по меньшей мере одной подлежащей контролю обмоткой и по меньшей мере одной другой обмоткой трансформатора, или в качестве подлежащего контролю параметра определяется по меньшей мере один коэффициент магнитной связи, который описывает магнитную связь между по меньшей мере одной подлежащей контролю обмоткой и по меньшей мере одной другой обмоткой трансформатора (1), причем контроль проводится в зависимости от подлежащих контролю параметров, при этом подлежащие контролю параметры сравниваются с заранее определенными эталонными параметрами или подлежащие контролю параметры сравниваются друг с другом с выработкой предупредительного сигнала или сигнала дефекта при получении отклонения, превышающего заранее определенное пороговое значение.
24. Устройство по п. 23, отличающееся тем, что посредством устройства (11) обработки данных в качестве подлежащего контролю параметра (параметров) дополнительно определяется собственная индуктивность подлежащей контролю обмотки и/или сопротивление подлежащей контролю обмотки, для чего проводится минимизация разности между оценочным напряжением подлежащей контролю обмотки и реальным напряжением подлежащей контролю обмотки или минимизация разности между оценочным напряжением первой подлежащей контролю обмотки и оценочным напряжением другой подлежащей контролю обмотки.
| P | |||
| BASTARD et al | |||
| A transformer model for winding studies, IEEE Transactions on Power Delivery, Vol | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| M | |||
| KEZUNOVIC et al | |||
| Modeling and simulation of the power transformer faults and related protective relay behavior, IEEE Transactions on Power Delivery, vol | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| US 20030036821 A1, 20.02.2003 | |||
| УСТРОЙСТВО КОНТРОЛЯ И ЗАЩИТЫ ОБМОТОК ТРАНСФОРМАТОРОВ ОТ ДЕФОРМАЦИЙ ПРИ КОРОТКИХ ЗАМЫКАНИЯХ | 1994 |
|
RU2136099C1 |
| Способ контроля состояния обмоток трансформатора | 1990 |
|
SU1742750A1 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ И ЗАЩИТЫ ОБМОТОК ТРАНСФОРМАТОРА | 2007 |
|
RU2339963C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ОБМОТОК ТРЕХОБМОТОЧНЫХ ТРАНСФОРМАТОРОВ ПОД НАГРУЗКОЙ | 2010 |
|
RU2428706C1 |

