Изобретение относится к области технических средств и способов охраны и может быть использовано для обнаружения движущихся нарушителей на расстоянии до 40 метров по их сейсмическим сигналам при охране территорий и подступов к различным объектам.
В качестве сейсмических возмущений, воспринимаемых детектором как сейсмическое событие, подразумеваются шаги человека или крупных животных, удары землеройным инструментом (кирка, лопата и т.д.). Событие считается распознанным, если уровень сигнала превышает некоторое заданное значение. При этом вырабатывается сигнал "тревога".
Известны системы, построенные на базе простых детекторов (патент US4001771, выдан 04.01.1977, G08B 13/00), содержащих один или несколько сейсмических сенсоров, аналого-цифровые преобразователи и блок цифровой обработки. Данные детекторы вычисляют мощность сейсмического сигнала и, если значение мощности превышает заданный порог, распознают сейсмическое событие на расстоянии LMAX - максимальном расстоянии между детектором и источником сейсмического возмущения, при котором сигнал возмущения распознается детектором как сейсмическое событие. Цепочка таких детекторов образует охранную систему.
Недостатком систем такого типа является то, что детекторы не определяют направление на источник возмущения, поэтому невозможно определить, где произошло событие - внутри охраняемой зоны или за ее пределами. Для определения только того, где расположен источник возмущения, внутри или за пределами охранной зоны, необходимо устанавливать две параллельные цепочки детекторов на расстоянии порядка LMAX. При этом требуется удвоенное число детекторов, соединительных кабелей, двойные трудозатраты для установки системы.
Известна также система (заявка WO 2010090752, публикация 12.08.2010, Н04В 1/06), позволяющая определить, что источник возмущения находится под землей. Для этого один из сенсоров устанавливается близко к поверхности, а второй - на большей глубине. Способ обработки требует, чтобы верхний сенсор воспринимал поверхностную волну, а нижний - преимущественно объемную волну.
Недостатком системы является то, что для обеспечения работы системы нижний сенсор закапывают на глубину порядка 3-6 м, что существенно удорожает монтажные работы. Данный детектор в вертикальном направлении распознает только два значения "подземный" - "наземный", но не определяет направление на источник подземного возмущения.
Наиболее близким техническим решением к заявляемому изобретению является детектор охранной системы (патент US7202797, публикация 10.04.2007, G08b 21/00) для защиты протяженного объекта, например трубопровода. Система состоит из набора детекторов. Каждый детектор состоит из нескольких сейсмических сенсоров, установленных последовательно в линию на близком расстоянии друг от друга (1-3 м), причем данная линия перпендикулярна охраняемому трубопроводу. Выходы сенсоров подключены к аналого-цифровым преобразователям блока цифровой обработки. В каждом детекторе определяется разность фаз для каждой пары сенсоров и по разности фаз определяется направление на источник возмущения. Вычисление соответствующего угла требует знания скорости распространения сейсмической волны. Скорость является величиной переменной, поэтому в детектор добавлен активный источник возмущения, при периодическом срабатывании которого вычисляется скорость распространения сейсмической волны.
Недостатком указанного устройства является наличие в нем дополнительных технических средств для создания эталонного сейсмического возмущения и измерения скорости сейсмической волны от этого возмущения. Другим недостатком устройства является то, что оно не предусматривает определения направления на подземный источник сейсмического возмущения.
Задачей, на решение которой направлено изобретение, является разработка способа сейсмического события, который позволит определять направление к источнику сейсмического возмущения как на поверхности, так и в трехмерном пространстве (подземный источник), повысит вероятность правильного распознавания сейсмического события и точность определения направления к источнику, а также разработка компактного сейсмического детектора для осуществления способа, что позволит счет за компактности детекторов сократить стоимость развертывания и обслуживания системы охраны периметра, построенной на основе таких детекторов.
Поставленная задача решается тем, что в способе распознавания сейсмического события предусматривается объединение в одном сейсмическом детекторе двух или трех пар, разделенных расстоянием сейсмических сенсоров, ориентированных под углом друг к другу, например, взаимно перпендикулярно по осям X, Y или по осям X, Y Z, соответственно, и последующая обработка полученных сейсмических данных с целью определения направления на источник сеймического возмущения.
Известен классический способ определения местоположения источника сигнала по «временной задержке прибытия сигнала», TDOA (time difference of arrival). Данный способ предусматривает определение временной задержки приема сигнала двумя или несколькими независимыми приемниками от одного источника. Задержка, как правило, определяется по максимуму взаимно корреляционной функции с пары разнесенных приемников. Вычисляя задержки по нескольким независимым парам приемников, можно определить направление на источник сигнала.
Данный способ работоспособен в однородных средах со стабильной скоростью распространения сигнала, например, при распространении радиоволн в эфире или акустических волн в воздушном пространстве.
Сейсмический сигнал, будучи до некоторой степени подобен акустическому сигналу, существенно от него отличается, так как, во-первых, среда распространения неоднородна, а скорость распространения нестабильна, во-вторых, имеют место эффекты, возникающие на границе раздела земля - воздух. Поэтому прямое использование метода TDOA для определения направления на источник сейсмического возмущения приводит к совершенно случайным результатам и невозможности использования данного метода.
В предлагаемом способе производят циклическую одновременную обработку сигналов в каждой паре сенсоров, причем в каждом цикле обработки вычисляют взаимную корреляцию во временном интервале Т.
Для каждой пары сенсоров, в каждом цикле выбирают максимальное значение взаимокорреляции RMAX и соответствующие им значения временного сдвига ΔТ, при этом анализируют поток выбранных значений RMAX и сейсмическое событие определяют как значимое, если выбранные значения взаимокорелляции хотя бы для одной пары сенсоров превысят текущий уровень взаимокорреляции шума в 2-3 раза, после чего на протяжении времени TMAX ищут максимумы выбранных значений взаимокорреляции и запоминают соответствующие им значения временного сдвига ΔT для каждой из взаимно перпендикулярных пар сенсоров, причем в случае обнаружения второго сопоставимого максимума значений взаимокорреляции RMAX запоминают значения временных сдвигов ΔТ, соответствующие второму максимуму значений взаимокорреляции. Направление на источник сигнала определяют как направление векторной суммы одной или нескольких пар ортогональных (в общем случае неколлинеарных) векторов, соответствующих парам сенсоров, где направление каждого вектора есть направление от первого сенсора пары ко второму сенсору пары, а модуль вектора равен запомненному значению ΔT для распознанного сейсмического события по данной паре сенсоров.
Для повышения точности вычисления направления на источник сейсмического события значения временного сдвига ΔТ для каждой пары сенсоров определяют как среднее значение выборки в окрестности корреляционного максимума.
Для определения азимута на источник сейсмического события на плоскости находят временной сдвиг по двум парам сенсоров, размещенных по ортогональным осям Х и Y, плоскостной азимут определяют как arctg ΔТy/ΔТX, где ΔТy и ΔТX - запомненные задержки по осям Y и Х соответственно.
Для определения направления в трехмерном пространстве дополнительно определяют временной сдвиг по третей паре сенсоров, расположенных вертикально по оси Z, вертикальный угол определяют как  где ΔТХ, ΔTY и ΔTZ - запомненные задержки по осям X, Y и Z соответственно.
где ΔТХ, ΔTY и ΔTZ - запомненные задержки по осям X, Y и Z соответственно.
Задача также решается тем, что сейсмический детектор, содержащий сейсмические сенсоры, выходы которых подключены к входам синхронизированных аналого-цифровых преобразователей блока обработки сигналов сенсоров, добавочно содержит дополнительные блоки обработки сигналов сенсоров, логический блок и блок вычисления направления на источник сейсмического события, сейсмические сенсоры, воспринимающие только вертикальные колебания, сгруппированы в пары, причем расстояние между сенсорами во всех парах равны, каждый сенсор одной пары подключен к входу аналого-цифрового преобразователя блока обработки сигналов сенсоров, первые выходы которых подключены к логическому блоку, распознающему сейсмическое событие, а вторые выходы подключены к блоку вычисления направления на источник сейсмического события, первый выход логического блока является выходом устройства, а второй выход логического блока подключен к тактирующему входу блока вычисления направления, причем блок обработки пары сигналов дополнительно содержит два полосовых фильтра, вычислитель взаимокорреляции с выборкой максимального значения и соответствующего временного сдвига и два интегрирующих фильтра, причем входы полосовых фильтров подключены к выходам аналого-цифровых преобразователей, выходы этих фильтров подключены к входам вычислителя взаимокорреляции, а выходы вычислителя подключены к входам интегрирующих фильтров, выходы которых являются выходами блока обработки пары сигналов. При этом расстояние между сенсорами в каждой паре одинаково и составляет от 0.4 до 0.8 м.
Для повышения точности вычисления временных задержек введен многоканальный интегратор, входы которого подключены ко вторым выходам блоков обработки пары сигналов, а выходы - к соответствующим входам блока вычисления направления на источник сейсмического возмущения.
Детектор, определяющий поверхностный азимут на источник возмущения, содержит две пары сенсоров, оси которых взаимно перпендикулярны, и два блока обработки пары сигналов.
Для вычисления направления в трехмерном пространстве добавлена третья пара сенсоров и третий блок обработки пары сигналов, причем сенсоры третьей пары размещены в непосредственной близости от первых двух пар и установлены вертикально один под другим. Предлагаемое устройство обрабатывает сигнал с пары близкорасположенных сенсоров, поэтому нижний сенсор может быть углублен всего лишь на 0.5 м.
Увеличение вероятности правильного распознавания сейсмического события достигается за счет анализа взаимокоррелированной мощности двух сигналов. При этом сигнал каждого сенсора пары может резко увеличиться, но если сигналы не коррелированы, то уровень взаимокорреляции остается без изменения, что уменьшает вероятность ложной тревоги. Повышение точности определения направления на источник возмущения достигается тем, что угол рассчитывается по результатам обработки более медленной волны.
Детектор, построенный на базе предлагаемого способа, реализуется в компактном исполнении, что позволяет существенно сократить расходы на его установку и обслуживание. Цепочка таких детекторов, объединенных в сеть, образует систему охраны периметра, причем для работы системы не требуется активный источник периодического возмущения.
Изобретение поясняется рисунками.
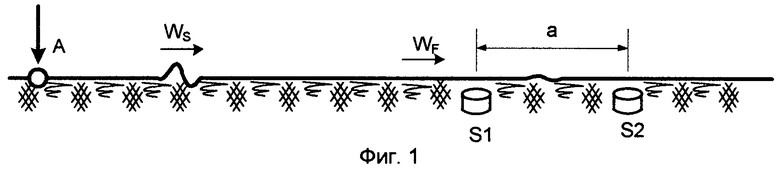
На Фиг.1 изображен принцип распространения сейсмической волны и ее восприятие парой сейсмических сенсоров.
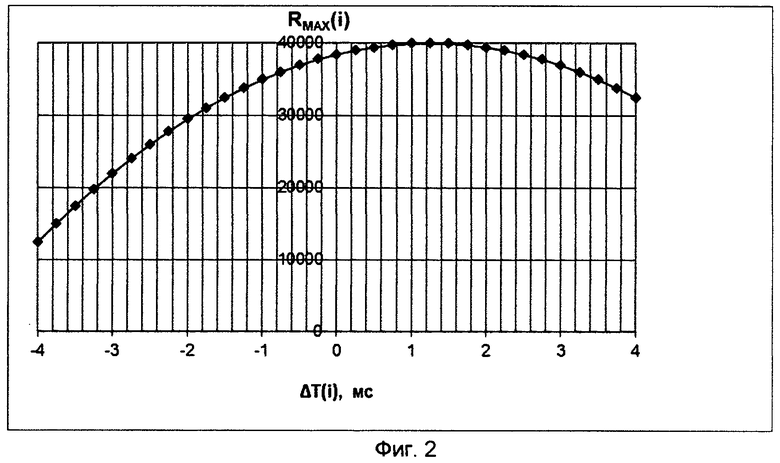
На Фиг.2 приведен пример определения текущего значения задержки прибытия сигнала по одной реализации взаимокорреляционной функции.
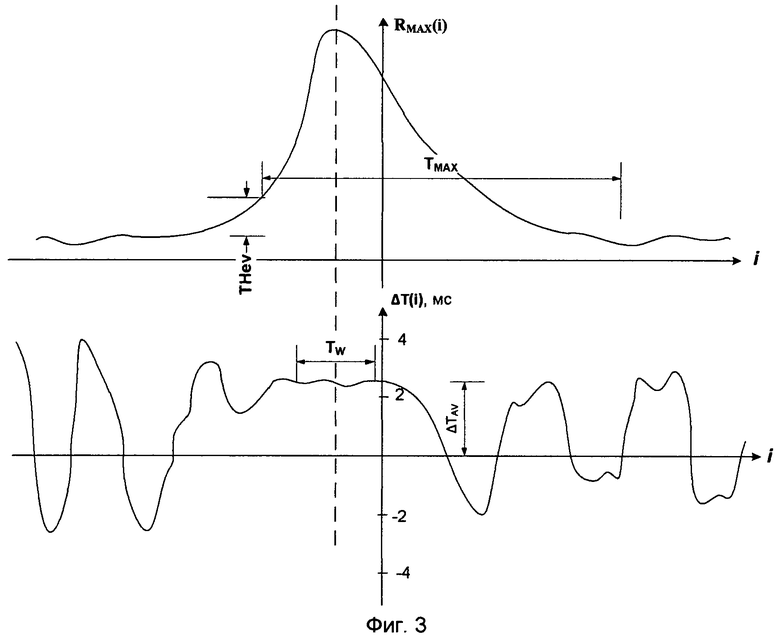
На Фиг.3 - пример определения сейсмического события и выбора значения временной задержки по максимальному значению максимумов взаимокорреляционной функции.
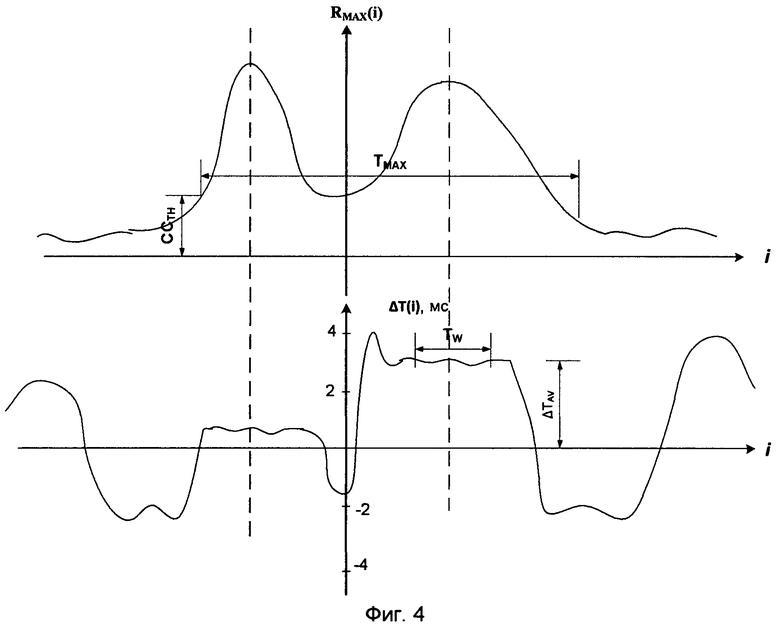
На Фиг.4 - пример определения сейсмического события и выбора значения задержки в двугорбой реализации максимумов взаимокорреляции.
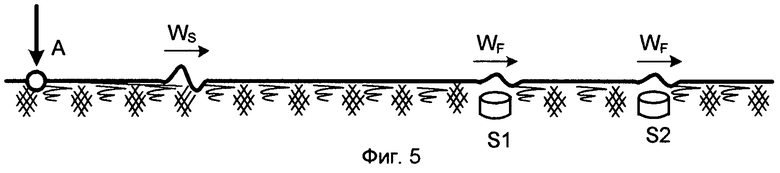
На Фиг.5 изображено прохождение сейсмической волны, при котором возникает двугорбость максимумов взаимокорреляции.
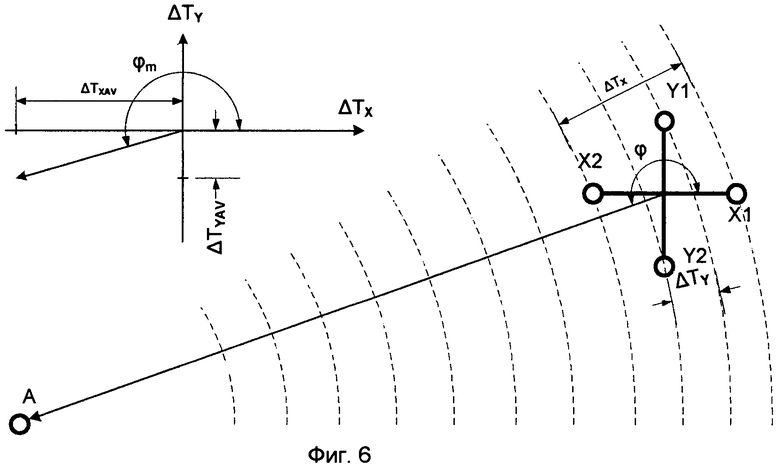
На Фиг.6 иллюстрируется принцип определения азимута на источник сейсмического возмущения.
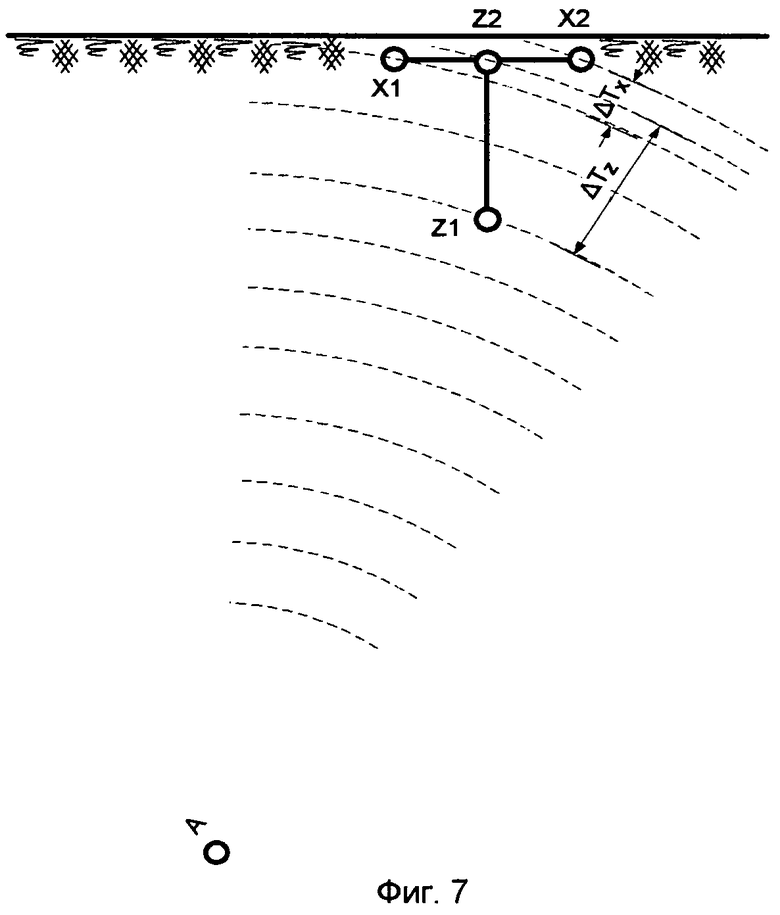
На Фиг.7 - принцип определения трехмерного направления на источник сейсмического возмущения в случае, если источник возмущения находится под землей.
На Фиг.8 приведена блок-схема сейсмического детектора, построенного на базе нескольких пар сейсмических сенсоров.
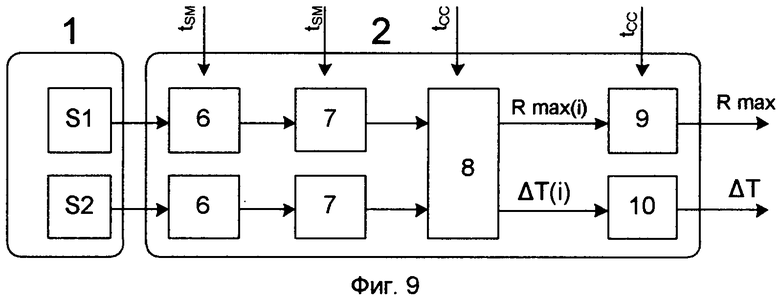
На Фиг.9 - блок-схема устройства обработки сигналов одной пары сейсмических сенсоров.
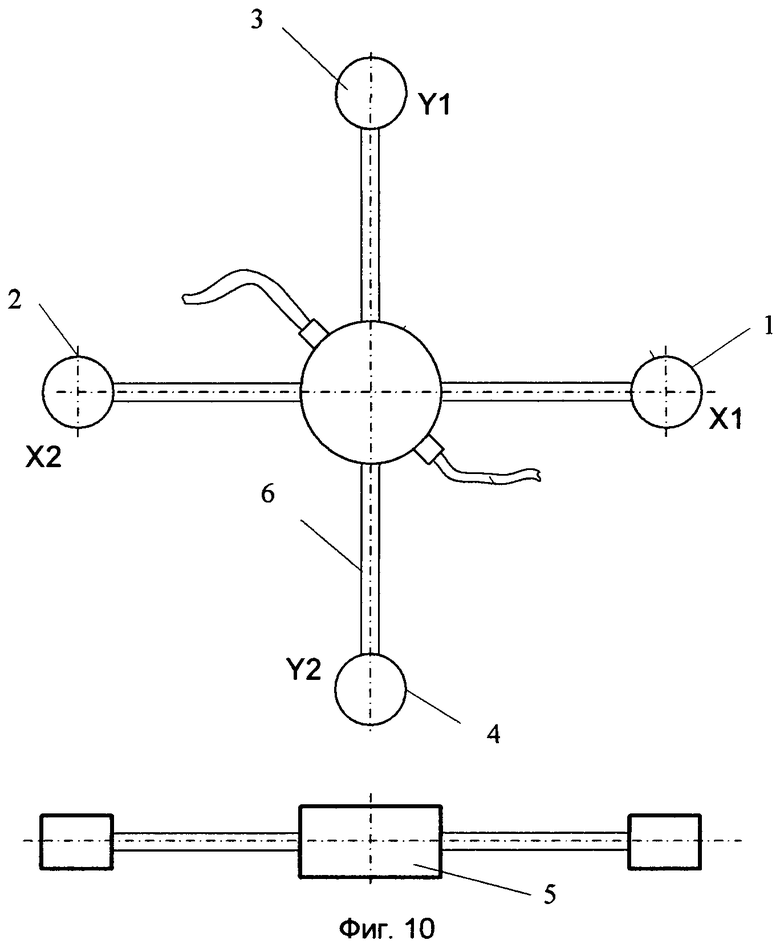
На Фиг.10 приведен вариант конструктивной реализации детектора, определяющего азимут на источник возмущения.
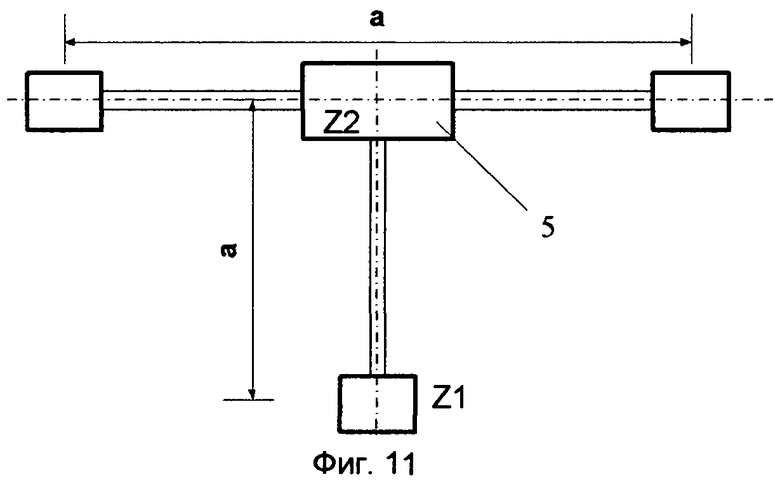
На Фиг.11 - вариант конструктивной реализации детектора, определяющего трехмерное направление на подземный источник сейсмического возмущения.
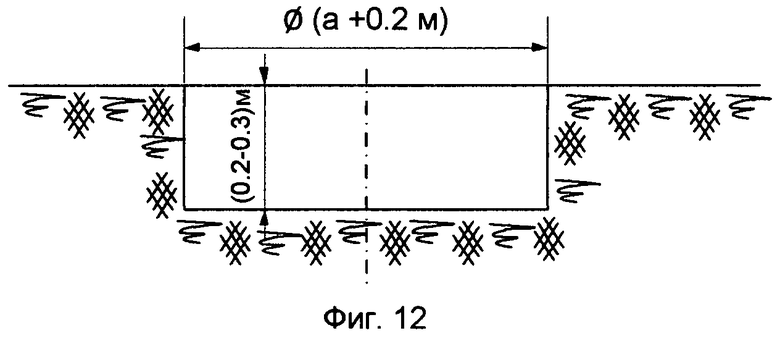
На Фиг.12 приведены габариты ямы для установки детектора, определяющего поверхностный азимут на источник возмущения.
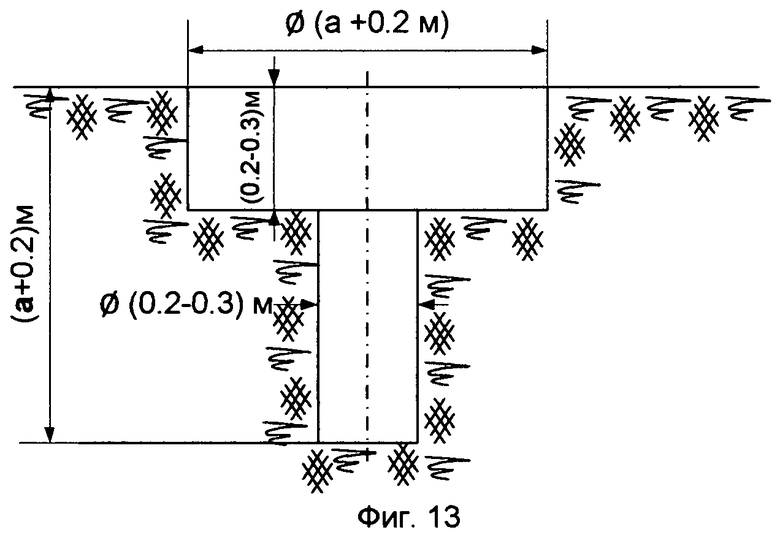
На Фиг.13 - приведены габариты ямы для установки детектора, определяющего трехмерное направление на подземный источник сейсмического возмущения.
На Фиг.14 - вариант детектора, построенного на базе трех сенсоров, размещенных под углом 120°.
Основой детектора (Фиг.1) является пара сенсоров S1 и S2. В процессе сейсмического возмущения возникают объемные и поверхностные упругие волны. Известно, что скорость объемных продольных волн примерно в 1.7 раза выше скорости объемных поперечных волн и поверхностных волн, поэтому мы будем условно называть объемные продольные волны быстрой волной (WF), а остальные волны - медленной волной (WS). Кроме того, известно, что объемная поперечная волна затухает быстрее поверхностных волн, поэтому медленную волну составляют в основном поверхностные волны. Практически установлено, что скорость распространения медленной волны в глинистой или песчаной почве составляет порядка (100-300) м/с, быстрой - порядка (200-500) м/с. Практически установлено, что основную часть энергии волны, порядка 70% несет медленная волна WS, поэтому она распространяется существенно дальше, чем быстрая волна WF. Поэтому в отличие от быстрой волны медленная волна всегда присутствует в приходящем сейсмическом сигнале. Экспериментально подтверждено, что и медленные и быстрые волны вызывают вертикальные колебания поверхностного слоя грунта, в связи с чем однокомпонентные сенсоры устанавливаются в грунте вертикально, воспринимая преимущественно вертикальные колебания и являясь поэтому приемниками, настроенными на восприятие преимущественно вертикальной составляющей приходящих сейсмических волн. Расстояние между сенсорами в паре равно а. Значение расстояния а определяется несколькими требованиями. С одной стороны, увеличение расстояния между сенсорами позволяет увеличить точность измерения временного сдвига приема сигналов двумя сенсорами, с другой стороны, уменьшение расстояния между сенсорами позволяет получить более высокие значения взаимокорреляционной функции за счет большего подобия сигналов и уменьшить габариты детектора. Исходя из перечисленных соображений а выбирается в пределах (0.4-0.8) м.
Практически установлено, что для глинистых или песчаных почв скорость распространения медленной волны лежит в диапазоне (100-300) м/с, поэтому максимальная задержка сигнала между сенсорами составляет (1.7-5) мс при расстоянии между сенсорами 0.5 м.
Значимые составляющие частотного спектра возникающих сейсмических колебаний лежат в пределах (20-300) Гц, поэтому частота дискретизации 1000 Гц (период = 1 мс) удовлетворяет критерию Найквиста. Однако для повышения точности измерения временной задержки выбрана повышенная частота дискретизации Fs=4 кГц (tS=0.25 мс). Период обновления взаимокорреляционной функции - tCC включает в себя целое число периодов дискретизации tS и составляет tCC=1 мс.
В течение каждого цикла вычисляется взаимокорреляционная функция на постоянном временном интервале порядка Tw=(32-64) мс. В процессе просчета взаимокорреляционной функции находится максимальное значение и соответствующий ему временной сдвиг ΔT(i). Пример одной реализации взаимокорреляционной функции представлен на Фиг.2, из которого видно, что в данном цикле RMAX(i)=4000 и ΔT(i).=1.25 мс. Выбранные значения RMAX(i) и ΔT(i) фильтруются интегрирующими фильтрами, отфильтрованные значения RMAX(i) и ΔT(i) используют в дальнейшей обработке.
На Фиг.3 представлена типичная реализация сейсмического события по одной из пар сенсоров. Событие идентифицируется по выбранным максимальным значениям взаимокорреляции, т.е. анализируется только взаимокоррелированная мощность сигналов. При этом сигнал каждого сенсора пары может резко увеличиться, но если сигналы не коррелированы, то уровень взаимокорреляции остается без изменения, что уменьшает вероятность ложной тревоги. Как показано на Фиг.3, временная задержка ΔT между сигналами сенсоров стабилизируется в окрестности максимума взаимокорреляции, поэтому последовательность процедур при определении события должна быть следующая:
1. При резком увеличении значения взаимокорреляции по одной из пар сенсоров определяется начало события.
2. После определения начала события находится максимум корреляции.
3. В окрестности максимума усредняется значение ΔT и в дальнейшем данные усредненные значения ΔТAV используется для расчета азимута на источник возмущения для данного конкретного события. На жестких почвах, в которых быстрая волна WF затухает намного меньше, чем в пористых почвах, сейсмическое событие представляется двумя максимумами выбранных максимальных значений взаимокорреляции (Фиг.4). Схема прохождения волны для такого случая представлена на Фиг.5. Как видно из рисунка, быстрая волна WF уже находится в районе сенсоров, а медленная WS еще на подходе к сенсору. Если мощность волны WF еще достаточна, то возникает первый взаимокорреляционный максимум и в его окрестности стабилизируется временная задержка ΔT. Данная задержка определяется скоростью распространения быстрой волны WF, скорость которой примерно в 1.7 раза выше, чем медленной волны WS. Впоследствии возникает второй взаимокорреляционный максимум, формируемый за счет медленной волны WS, и в его окрестности тоже стабилизируется временная задержка ΔT. Для дальнейших расчетов следует выбирать значения временной задержки ΔТAV, соответствующие второму максимуму, т.к. точность ее вычисления значительно выше из-за более высокого разрешения при измерении ΔT. Поэтому последовательность процедур при определении задержки ΔТAV:
1. При резком увеличении взаимокорреляции по одному из каналов определяется начало события.
2. После определения начала события находится максимум корреляции.
3. В окрестности максимума усредняется значение ΔT и находят усредненное значение ΔТAV.
4. На протяжении времени TMAX после определения начала события продолжают искать второй максимум взаимокорреляции.
5. Если находят второй максимум взаимокорреляции, то в окрестности второго максимума находят усредненное значение ΔТAV, которое впоследствии используется для вычисления направления на источник возмущения для данного конкретного события.
6. Если на протяжении TMAX после определения начала события не находят второй максимум, то для вычисления направления на источник возмущения для данного конкретного события используют значение ΔТAV, найденное в окрестности единственного максимума.
Длительность Тмах устанавливается пользователем в пределах (0.3-0.5) с. Для каждого распознанного сейсмического события определяют азимут на источник возмущения следующим образом: находят временные задержки по двум взаимно перпендикулярным осям ΔTXAV и ΔТYAV (Фиг.6), а угол φ между осью Х и направлением на источник возмущения вычислят следующим образом

В случае определения направления на подземный источник, для каждого распознанного сейсмического события соответствующий объемный угол определяют следующим образом: определяют три значения задержек ΔТXAV, ΔТYAV и ΔTZAV по трем взаимно перпендикулярным осям (Фиг.7). По первым двум определяют угол согласно (1), а угол между поверхностью земли и направлением на источник возмущения определяют согласно выражению

Детектор, реализующий описанный способ (Фиг.8), содержит несколько пар 1 сейсмических сенсоров, воспринимающих только вертикальные колебания, соответствующее количество блоков 2 обработки пары сигналов, логический блок 3, многоканальный интегратор 4 и блок 5 вычисления угла на источник сейсмического события, причем входы блоков 2 обработки пары сигналов подключены к выходам соответствующих сенсоров, первые выходы блоков 2 подключены к отдельным входам логического блока 3, вторые выходы блоков 2 подключены к соответствующим входам многоканального интегратора 4, выходы интегратора 4 подключены к соответствующим входам блока 5 вычисления направления, первый выход логического блока 3 и выход блока 5 являются выходами устройства, а второй выход логического блока 3 подключен к тактовому входу блока 5 вычисления направления.
Блок 2 обработки пары сигналов (Фиг.9), в свою очередь, содержит два канала последовательно соединенных аналого-цифровых преобразователей 6 и полосовых фильтров 7, вычислитель взаимокорреляционной функции 8 и двух интегрирующих фильтров 9 и 10, причем входы аналого-цифровых преобразователей 6 подключены к выходам сенсоров S1 и S2, входы вычислителя 8 подключены к выходам полосовых фильтров 7, первый выход вычислителя взаимокорреляции подключен к входу интегрирующего фильтра 9, второй выход подключен к входу интегрирующего фильтра 10, а выходы фильтров являются выходами блока обработки пары сигналов.
Выходные сигналы пары 1 сенсоров обрабатываются блоком 2. Выходные аналоговые сигналы сенсоров S1 и S2 преобразуются в цифровой код преобразователями 6, фильтруются фильтрами 7 и поступают на вход вычислителя взаимокорреляционной функции 8. Цифровое преобразование и фильтрация выполняется с интервалом дискретизации tSM, а вычисление взаимокорреляции на временном интервале tCC, причем в предлагаемой реализации tSM=0.25 мс,a tCC=1 мс.
Полосовые фильтры 7 подавляют ультранизкочастотные составляющие в пределах (0-20) Гц, а также высокочастотные сигналы свыше (120-150)Гц. Интегрирующий фильтр 9 фильтрует результат вычисления взаимокорреляционной функции, что обеспечивает нахождение по сглаженной форме единственного значения RMAX(i) и соответствующего ему значения ΔT(i), отфильтрованного фильтром 10.
Сейсмический детектор содержит несколько пар 1 сейсмических сенсоров и блоков обработки 2. Значения RMAX(i) со всех блоков обработки поступают в логический блок 3, a ΔT(i) со всех блоков обработки поступают в многоканальный интегратор 4. Значения временных задержек усредняется интегратором, и усредненные значения ΔТAV всех N каналов поступают в блок 5 вычисления направления на источник возмущения выборки и усреднения временных интервалов ΔT(i). В случае обнаружения сейсмического события логический блок вырабатывает сигнал тревоги и тактовый сигнал, соответствующий максимуму взаимокорреляции согласно Фиг.3 или соответствующий второму максимуму согласно Фиг.4. При этом блоком 5 запоминаются текущие входные значения ΔТAV всех N каналов и одноразово для обнаруженного сейсмического события вычисляется угол, соответствующий направлению на источник сейсмического возмущения.
Сейсмический детектор, определяющий азимут на источник возмущения, реализуется с помощью двухканальной схемы Фиг.8. При этом две пары сенсоров расположены взаимно перпендикулярно (см. Фиг.6). Конструктивно такой детектор (Фиг.10) состоит из четырех сенсоров 1, 2 (X1 и Х2) 3, 4 (Y1 и Y2), соединенных с центральным устройством 5 гибкими крепежными элементами 6, что позволяет каждому сенсору воспринимать сейсмические волны независимо один от другого. В качестве такого элемента может использоваться толстостенная пластиковая трубка, обеспечивающая герметичное соединение сенсоров с центральным блоком и задающая фиксированные расстояния между сенсорами в каждой паре. Направление на источник сейсмического возмущения вычисляется согласно выражению (1).
Детектор монтируется в грунте, размеры ямы для монажа детектора приведены на Фиг.12. Размер а=0.5 м определен как оптимальный.
Детектор, определяющий направление на источник возмущения в трехмерном пространстве, реализуется с помощью трехканальной схемы Фиг.8. При этом дополнительная пара сенсоров Z1 и Z2 размещена вертикально на расстоянии а (Фиг.7). Конструктивно трехмерный детектор (Фиг.11) построен аналогично двухкомпонентному. Сенсор Z2 смонтирован в центральном устройстве, а сенсор Z1 опущен на расстояние а от центрального блока. В качестве сенсора Z2 может быть использован один из сенсоров X1, Х2, Y1 или Y2. Направление на источник сейсмического возмущения вычисляют согласно выражению (2).
Трехмерный детектор монтируется в яме аналогичного размера (Фиг.13), но для сенсора Z1 высверливается центральное отверстие диаметром (0.2-0.3)м и глубиной (а+0.2 м) от поверхности земли.
Аналогично может быть построен детектор с неортогональными осями пар сенсоров. Например, на Фиг.14 приведен детектор, построенный на базе трех сенсоров, размещенных под углом 120°. Расстояние между всеми сенсорами составляет а и все три сенсора образуют три пары, по которым рассчитывается задержки ΔТAB, ΔТBC, ΔТCA в соответствии с описанным способом и устройством. Векторная сумма любых двух из найденных задержек представляет собой вектор, направленный на источник сейсмического возмущения.
В качестве базовой реализации детектора используется возможная реализация детектора, содержащая четыре сенсора для двумерного случая (две ортогональные пары сенсоров) и шесть сенсоров для трехмерного случая (три ортогональные пары сенсоров). Возможны также минимальная и расширенная реализации детектора. В общем случае реализация детектора может содержать произвольное число сенсоров, при этом пары сенсоров не обязательно должны быть ортогональными, а расстояния между сенсорами пары не обязательно должны быть одинаковыми для разных пар.
Минимальная возможная реализация детектора содержит три сенсора для двумерного случая (например, две ортогональные пары сенсоров, при этом один из сенсоров является общим для обеих пар) и четыре сенсора для трехмерного случая (например, три ортогональные пары сенсоров, при этом один сенсор является общим для трех пар).
Расширенная реализация детектора может содержать, например, пять сенсоров, образующих четыре пары, для двумерного случая. Такая реализация детектора, после вычисления временных задержек по каждой паре, позволяет с помощью известного метода TDOA и известных алгоритмов определить, кроме направления, среднюю скорость распространения возмущения и расстояние до источника возмущения по каждому распознанному сейсмическому событию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком | 2022 |
|
RU2800112C1 |
| Сейсмический пеленгатор с малой базой установки сейсмоприемников | 2020 |
|
RU2757972C1 |
| Сейсмическое средство обнаружения с возможностью пеленгации наземных объектов | 2017 |
|
RU2650703C1 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ СЕЙСМИЧЕСКОЙ ПЕЛЕНГАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2410751C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СЕЙСМИЧЕСКИЙ ЛОКАТОР НАЗЕМНЫХ ОБЪЕКТОВ | 2013 |
|
RU2536087C1 |
| АДАПТИВНЫЙ СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2003 |
|
RU2248015C1 |
| СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2001 |
|
RU2204849C2 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2004 |
|
RU2273867C1 |
| СЕЙСМИЧЕСКИЙ НЕКОНТАКТНЫЙ ДАТЧИК ОБНАРУЖЕНИЯ ЧЕЛОВЕКА | 2017 |
|
RU2671885C1 |
Изобретение относится к области технических средств и способов охраны и может быть использовано для обнаружения движущихся нарушителей на расстоянии до 40 метров по их сейсмическим сигналам при охране территорий и подступов к различным объектам. Заявлен способ распознавания сейсмического события, предусматривающий объединение в одном сейсмическом детекторе двух или трех пар, разделенных расстоянием сейсмических сенсоров, ориентированных под углом друг к другу, и последующую обработку полученных сейсмических данных с целью определения направления на источник сейсмического возмущения. Для реализации данного способа предложен также сейсмический детектор, содержащий сейсмические сенсоры, АЦП, блок распознавания сейсмического события, блок вычисления направления на источник сейсмического события, полосовые и интегрирующие фильтры, вычислитель взаимокорреляции. Технический результат: повышение вероятности правильного распознавания сейсмического события и точности определения направления к источнику. 2 н. и 7 з.п. ф-лы, 14 ил.
1. Способ распознавания сейсмического события, заключающийся в приеме сейсмических сигналов от источника сейсмического события сейсмическим детектором, отличающийся тем, что в сейсмическом детекторе, содержащем, по крайней мере, две пары объединенных попарно сейсмических сенсоров, характеризуемых направлением от первого сенсора ко второму, пары сенсоров располагают неколлинеарно друг к другу, а сигналы от каждой пары сенсоров обрабатывают одновременно и циклически, вычисляя в каждой паре взаимную корреляцию R во временном интервале Т, выбирают в каждом интервале максимальное значение взаимокорреляции RMAX и соответствующее ему значение временного сдвига ΔТ, и при превышении им текущего уровня взаимокорреляции шума хотя бы по одной паре сенсоров в 2-3 раза определяют событие как значимое, после чего на протяжении ТMAX ищут максимумы выбранных значений взаимокорреляции и запоминают соответствующие им значения временного сдвига ΔT для каждой из пар сенсоров, а в случае обнаружения второго сопоставимого максимума значений взаимокорреляции RMAX запоминают значения временных сдвигов ΔТ, соответствующие второму максимуму значений взаимокорреляции, при этом направление на источник сигнала определяют как направление векторной суммы векторов, совпадающих по направлению с направлением пар сенсоров, и характеризующихся модулем, равным соответствующему значению ΔТ для распознанного сейсмического события.
2. Способ по п.1, отличающийся тем, что для повышения точности вычисления направления на источник сейсмического события значения временного сдвига ΔT для каждой пары сенсоров определяют как среднее значение выборки в окрестности корреляционного максимума.
3. Способ по п.1 или 2, отличающийся тем, что для определения азимута, определяющего направление на источник сейсмического события, на плоскости находят временной сдвиг по двум парам сенсоров, размещенных по ортогональным осям Х и Y, при этом плоскостной азимут определяют как arctg ΔТу/ΔТХ, где ΔТу и ΔТХ - запомненные задержки по осям Y и Х соответственно.
4. Способ по п.3, отличающийся тем, что для определения направления в трехмерном пространстве дополнительно определяют временной сдвиг по третьей паре сенсоров, расположенной вертикально по оси Z, вертикальный угол определяют как  где ΔТХ, ΔТУ и ΔТZ - запомненные задержки по осям X, Y и Z соответственно.
где ΔТХ, ΔТУ и ΔТZ - запомненные задержки по осям X, Y и Z соответственно.
5. Сейсмический детектор для распознавания сейсмического события содержит сейсмические детекторы, аналого-цифровые преобразователи, отличающийся тем, что сейсмические детекторы, воспринимающие только вертикальные колебания почвы, сгруппированы в пары, каждый сенсор одной пары подключен ко входу соответствующего аналого-цифрового преобразователя блока обработки сигналов сенсоров, первые выходы которых подключены к логическому блоку, распознающему сейсмическое событие, а вторые выходы подключены к блоку вычисления направления на источник сейсмического события, первый выход логического блока является выходом сейсмического детектора, а второй выход логического блока подключен к тактирующему входу блока вычисления направления, причем блок обработки пары сигналов дополнительно содержит два полосовых фильтра, вычислитель взаимокорреляции с выборкой максимального значения и соответствующего временного сдвига и два интегрирующих фильтра, при этом входы полосовых фильтров подключены к выходам аналого-цифровых преобразователей, а выходы этих фильтров подключены к входам вычислителя взаимокорреляции, в то же время выходы вычислителя подключены к входам интегрирующих фильтров, выходы которых являются выходами блока обработки пары сигналов.
6. Сейсмический детектор по п.5, отличающийся тем, что для определения направления на поверхностное сейсмическое возмущение содержит две пары сейсмических сенсоров, расположенные взаимоперпендикулярно, и два блока обработки сигналов пары сенсоров.
7. Сейсмический детектор по п.5, отличающийся тем, что для определения направления на сейсмическое возмущение в трехмерном пространстве содержит три пары сейсмических сенсоров, расположенные взаимоперпендикулярно, и три блока обработки сигналов пары сенсоров.
8. Сейсмический детектор по любому из пп.5-7, отличающийся тем, что расстояние между сенсорами в каждой паре одинаково и составляет от 0,4 до 0,8 м.
9. Сейсмический детектор по любому из пп.5-7, отличающийся тем, что для повышения точности вычисления временных задержек содержит дополнительно многоканальный интегратор, входы которого подключены ко вторым выходам блоков обработки пары сигналов, а выходы - к соответствующим входам блока вычисления направления на источник сейсмического возмущения.
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2004 |
|
RU2273867C1 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ СЕЙСМИЧЕСКОЙ ПЕЛЕНГАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2410751C1 |
| СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2001 |
|
RU2204849C2 |
| Способ сейсмической разведки | 1986 |
|
SU1377795A1 |
| US 7598884 B2, 06.10.2009. | |||

