Предлагаемое изобретение относится к области дистанционной лазерной спектроскопии, в частности к лидарным комплексам дистанционного мониторинга и контроля экологического состояния атмосферы и гидросферы, и может быть использовано для поиска, обнаружения и высокоточного определения координат удаленных источников загрязнения окружающей среды.
Лидарные комплексы, основанные на дистанционном лазерном зондировании, проводят детальный анализ объектов и компонентов окружающей среды по их спектральным характеристикам с существенно более высоким пространственным разрешением по сравнению с наблюдательными системами, позволяют инспектировать динамику и прогнозировать изменения состояния биосферы. К преимуществам лидаров относится непрерывное площадное и профильное сканирование с одновременным определением широкого набора химических соединений и веществ в сочетании с высокой скоростью детектирования.
Известны лидарные комплексы [1, 2] для дистанционного измерения концентраций загрязняющих веществ в атмосфере, состоящие в общем случае, включают в себя лазерный источник зондирования, оптическую систему, направляющую лазерное излучение в исследуемое пространство, приемный телескоп, спектроанализатор и фотоприемное устройство. К недостаткам аналогов следует отнести отсутствие в их структуре функциональных компонентов пространственного сканирования, что не позволяет инспектировать местность в широком угловом поле, что существенно увеличивает трудоемкость получения информации об экологическом состоянии атмосферы.
Наиболее близким к заявляемому изобретению, по совокупности признаков принятым в качестве прототипа, является лидарный комплекс [3], содержащий лазерный источник зондирования, оптическую систему, направляющую лазерное излучение в инспектируемое пространство, приемный телескоп, спектроанализатор и фотоприемное устройство, и устанавливаемый на движущейся платформе (фургон автомобиля) для проведения многокомпонентного анализа воздуха. Устройство [3] характеризуется следующими недостатками:
- громоздкость комплекса в целом и, в частности, оптической системы кругового обзора (например, необходимость в отражателях, устанавливаемых на трассах зондирования), что ограничивает универсальность и использование комплекса на летающих платформах, в т.ч. на беспилотных,
- использование системы сканирования по однострочной азимутальной траектории сопровождается флуктуациями пространственного разрешения и, как следствие, пропусками объектов зондирования,
- отсутствие системы узкопольного сканирования, что обуславливает недостаточное пространственное разрешение и снижает эффективность инспекции пространства в широком угловом поле обзора,
- отсутствие узла регистрации профильного распределения мощности загрязнителей атмосферного воздуха.
Задача заявляемого изобретения состоит в обеспечении непрерывного аэросканирования в азимутальном направлении с высоким пространственным разрешением в широком угловом поле лазерного зондирования.
Техническим результатом изобретения является повышение точности обнаружения объектов зондирования.
Указанный технический результат реализуется за счет следующих факторов:
- введение в оптическую систему, направляющую лазерное излучение в инспектируемое пространство, плоского зеркала эллиптической формы с выборками на тыльной стороне, осуществляющего широкопольное круговое аэросканирование территорий в азимутальном направлении, перпендикулярном движению носителя,
- ввод в ту же оптическую систему, направляющую лазерное излучение в пространство, дефлектора на базе двух оптических клиньев с функцией вращения с разной скоростью на одной оптической оси, осуществляющего узкопольное угловое аэросканирование по спиральной траектории вокруг визирной оси плоского зеркала с равномерным пространственным разрешением,
- введение в оптическую систему, направляющую лазерное излучение в пространство, абсолютных датчиков начального положения и контроллеров двигателей плоского облегченного зеркала и дефлектора,
- использование специализированных алгоритмов коррекции скорости вращения пары оптических клиньев по мере прохождения спиральной траектории аэросканирования,
- размещение в одной оптической системе, направляющей лазерное излучение, зеркала эллиптической формы, облегченного выборками с тыльной стороны, осуществляющего широкопольный обзор, и дефлектора узкопольного сканирования в каждом мгновенном ракурсе зондирования пространства.
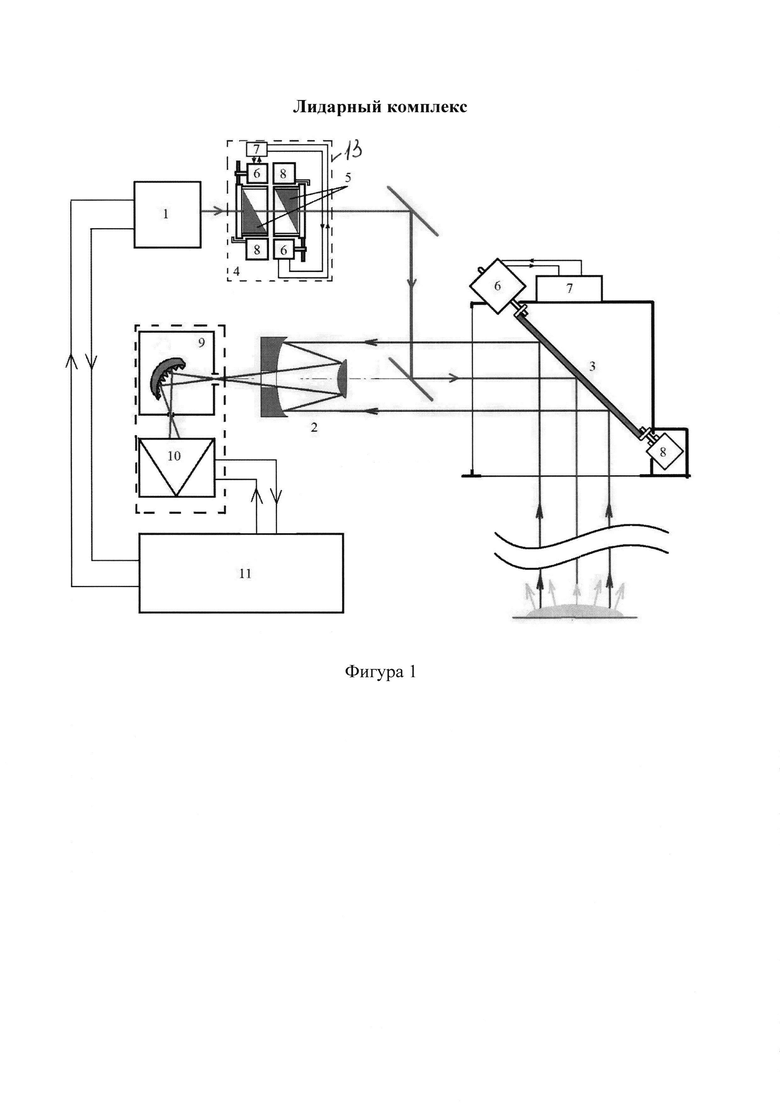
Техническая сущность и принцип действия изобретения поясняется фигурой 1.
Функциональная схема лидарного комплекса.
Лидарный комплекс (фиг. 1) состоит из лазерного источника зондирования 1, оптической системы, направляющей лазерное излучение в инспектируемое пространство, приемного телескопа 2, плоского зеркала 3 эллиптической формы, выполненного с выборками на тыльной стороне, с функцией широкопольного кругового аэросканирования в азимутальном направлении, перпендикулярном движению носителя, дефлектора 4 на базе двух оптических клиньев 5 с возможностью вращения с разной скоростью на одной оптической оси вокруг визирной оси плоского зеркала, осуществляющего узкопольное угловое аэросканирование по спиральной траектории с равномерным пространственным разрешением, автономных шаговых двигателей 6 и управляющих контроллеров 7 плоского зеркала и дефлектора и абсолютных датчиков 8 начального положения двигателей 6, спектроанализатора 9, фотоприемного устройства 10.
Устройство работает следующим образом.
Луч из лазерного источника зондирования 1, проходя через оптическую систему, по мере распространения попадает на дефлектор узкопольного углового аэросканирования 4 по спиральной траектории. Затем зондирующий луч попадает на плоское зеркало 3, осуществляющее широкопольное круговое сканирование инспектируемого пространства. Модуль управления и обработки информации 11 считывает данные абсолютных датчиков начального положения 8, производит расчет координат лазерного луча в пространстве и корректирует с помощью контроллеров 7 скорости вращения шаговых двигателей 6. Отраженный от плоского зеркала эллиптической формы 3 луч направляется в исследуемое пространство. Эхо-сигнал от объекта принимается телескопом 2 и направляется на спектроанализатор 9, после чего фиксируется фотоприемником 10, сигнал с которого записывается модулем управления и обработки информации 11. Программное обеспечение модуля 11 обрабатывает данные о координатах зондирующего луча, выполняет картирование и формирует трехмерный профиль распределения концентрации примесей в атмосфере и на подстилающей поверхности.
В заявляемом изобретении лидарного комплекса в оптической системе, направляющей лазерное излучение в пространство, широкопольное зондирование и наведение луча осуществляется подвижным, сканирующим зеркалом 3 эллиптической формы, облегченным выборками с тыльной стороны. Сканирующее зеркало закреплено на валу шагового двигателя 6, осуществляющего круговой обзор инспектируемого пространства. Управление шаговым двигателем осуществляется контроллером 7. Плавность движения зеркала достигается при величине полного шага, равной 1.8° с коэффициентом дробления шага 1/4. Для контроля положения вала двигателя с точностью 15' установлен абсолютный датчик начального положения 8 с последовательным интерфейсом SSI для передачи данных о положении вала в модуль управления и обработки информации 11.
Одно из существенных преимуществ такой конструкции дефлектора по сравнению с другими - наличие "оптической редукции" между углом поворота клиньев 5 и углом отклонения оптической оси дефлектора. Такая конструкция обеспечивает максимальную точность позиционирования, так как ошибка в угле отклонения оптической оси в 1' соответствует ошибке в угле поворота клиньев 9'. Не менее важное преимущество - простота управления и контроля дефлектора. Предлагаемый дефлектор позволяет производить обзор всей исследуемой области за время не более 1 мс при частоте вращения каждого из клиньев 50-200 Гц. Вращение осуществляется посредством шаговых двигателей 13 с минимальной величиной шага 9,5'. Положение клиньев 5 фиксируется датчиком углового поворота 8.
Использование специализированных алгоритмов коррекции скорости вращения пары оптических клиньев устраняет неравномерность разрешающей способности по полю сканирования по мере прохождения траектории, обеспечивает отсутствие "слепых" зон по всей области обзора при известной дальности зондирования и расходимости лазерного изучения.
Спиральная траектория сканирования формируется при вращении двух оптических клиньев в одном направлении с разными скоростями. При использовании в дефлекторе двух одинаковых оптических клиньев координаты зондирующего луча в пространстве при известной дальности зондирования могут быть получены на основании данных о частотах вращения и начальном угле поворота каждого из клиньев.
Географические координаты носителя лидарной системы определяются GPS/ГЛОНАСС-треккером, установленным на платформе носителя.
В лидарном комплексе использованы разработанные нами алгоритмы коррекции скорости вращения пары оптических клиньев по мере прохождения траектории. При этом предотвращается возникновение пропусков на внешних витках спирали или множественного переналожения мгновенного поля зрения на внутренних витках и существенно упрощается получение объективных данных в процессе дистанционного зондирования.
Пространственное разрешение зависит от коэффициента, определяемого отношением частот вращения оптических клиньев [4]. Для нахождения оптимального значения данного соотношения на любом витке спирали сканирования предложен специализированный алгоритм. Исходными данными для данного алгоритма являются расходимость лазерного излучения и дистанция зондирования. Первоначально в модуле управления и обработки информации 11 вычисляется элемент разложения, равный мгновенному полю зрения на заданной дальности. После этого происходит заполнение каждого витка спирали сканирования так, чтобы элементы разложения располагались на траектории без наложения друг на друга. Одновременно вычисляется коэффициент для каждого витка спирали и определяются необходимые скорости вращения оптических клиньев. Данная информация передается на контроллер шаговых двигателей 7 в режиме реального времени. С помощью созданного программного обеспечения значения коэффициента сохраняются в диапазоне 0.8-0.95 для равномерного заполнения элементами разложения поля сканирования на любых дальностях при расходимости лазерного излучения 1.5 мрад.
Заявляемый лидарный комплекс решает следующие функциональные задачи по назначению:
- аэросканирование и обзор инспектируемого пространства с высокой плотностью угловых координат в процессе дистанционного экологического мониторинга,
- обеспечение равномерного пространственного разрешения во всем диапазоне ракурсов азимутального сканирования,
- пространственное сканирование по спиральной траектории при различных ракурсах широкопольного зондирования с высокой эффективностью на базе специализированного алгоритма подавления флуктуации пространственного разрешения,
- увеличение точности контроля экологических параметров за счет построения профильного распределения мощности загрязняющих веществ и опасных объектов в атмосфере и гидросфере на основе использования специализированных алгоритмов, обеспечивающих отсутствие "слепых" зон по всей области обзора,
- картирование в режиме реального времени спектральных сигнатур техногенных выбросов в окружающей среде синхронно с площадным лазерным аэросканированием, позволяющее минимизировать ошибки в обнаружении источников и в определении последствий аварийных ситуаций,
- снижение массы и габаритов лидарного комплекса за счет размещения в одной оптической системе, направляющей лазерное излучение в пространство, облегченного плоского зеркала и дефлектора узкопольного сканирования в совокупности с автономными шаговыми двигателями, их управляющими контроллерами и абсолютными датчиками положения.
Таким образом, считаем, что совокупность заявляемых признаков не повторяет перечень свойств отдельных признаков, известных из других лидарных комплексов.
1. Лидарная система для дистанционного измерения концентраций загрязняющих веществ в атмосфере. Патент №134648. Опубл. 20.11.2013.
2. Способ дистанционного поиска новых месторождений нефти и газа. Патент №2498358, Опубл. 10.11.2013.
3. Лидарный комплекс контроля загрязнения воздуха. Патент №2022251. Опубл. 30.10.1994.
4. Чесноков Д.В. Микромеханический дефлектор световых потоков // Интерэкспо Гео-Сибирь. - 2006. - Т. 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕПЛОПЕЛЕНГАТОР | 2011 |
|
RU2458356C1 |
| Способ и лидарная система для обнаружения ориентированных ледяных кристаллов в атмосфере | 2023 |
|
RU2813096C1 |
| ЛИДАРНЫЙ КОМПЛЕКС КОНТРОЛЯ ЗАГРЯЗНЕНИЯ ВОЗДУХА | 1991 |
|
RU2022251C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2016 |
|
RU2639321C1 |
| Способ лидарного зондирования и устройство для его осуществления | 2013 |
|
RU2692121C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ЛАЗЕРНОГО ЗОНДИРОВАНИЯ КРИСТАЛЛИЧЕСКИХ ОБЛАКОВ | 2022 |
|
RU2790806C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ | 2011 |
|
RU2457504C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПАРАМЕТРОВ ПОЛУАКТИВНОЙ ЛАЗЕРНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ | 1988 |
|
SU1841030A1 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2011 |
|
RU2471211C1 |
| Мобильный лидарный газоанализатор | 2023 |
|
RU2804263C1 |
Лидарный комплекс содержит лазерный источник зондирования, оптическую систему, направляющую лазерное излучение в инспектируемое пространство, приемный телескоп, спектроанализатор и фотоприемное устройство. Оптическая система содержит плоское зеркало эллиптической формы, выполненное с выборками на тыльной стороне, с функцией широкопольного кругового аэросканирования в азимутальном направлении, перпендикулярном движению носителя, дефлектор на базе двух оптических клиньев, осуществляющий узкопольное угловое аэросканирование по спиральной траектории вокруг визирной оси плоского зеркала, датчики начального положения шаговых двигателей, программное обеспечение картирования спектральных сигнатур техногенных выбросов в окружающей среде синхронно с площадным лазерным аэросканированием. Технический результат заключается в повышении точности обнаружения объектов зондирования. 1 з.п. ф-лы, 1 ил.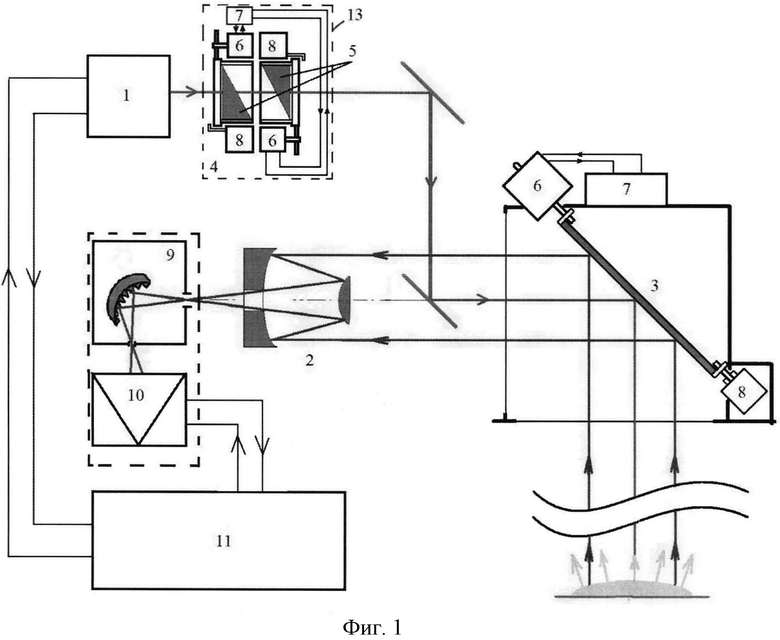
1. Лидарный комплекс, содержащий лазерный источник зондирования, оптическую систему, направляющую лазерное излучение в инспектируемое пространство, приемный телескоп, спектроанализатор и фотоприемное устройство, отличающийся тем, что в оптическую систему, направляющую лазерное излучение в пространство, введены плоское зеркало эллиптической формы, выполненное с выборками на тыльной стороне, с функцией широкопольного кругового аэросканирования в азимутальном направлении, перпендикулярном движению носителя, дефлектор на базе двух оптических клиньев с возможностью вращения на одной оптической оси с разной скоростью, осуществляющий узкопольное угловое аэросканирование по спиральной траектории вокруг визирной оси плоского зеркала с равномерным пространственным разрешением, автономные шаговые двигатели с управляющими контроллерами плоского зеркала и дефлектора и абсолютные датчики начального положения шаговых двигателей.
2. Лидарный комплекс по п. 1, отличающийся тем, что введенные в оптическую систему, направляющую лазерное излучение в инспектируемое пространство, контроллеры и абсолютные датчики начального положения снабжены специализированным программным обеспечением, согласованным с устройством ГЛОНАСС, совместимым с платформой носителя.
| US 5359403 A1, 25.10.1994 | |||
| US 6804269 B2, 12.10.2004 | |||
| РАСХОДОМЕР ТУРБИННОГО ТИПА | 0 |
|
SU161516A1 |
| Устройство сканирования световым пучком | 1987 |
|
SU1550459A1 |

