Перекрестная ссылка на родственные заявки
[0001] По данной заявке испрашивается приоритет и преимущество предварительной заявки США № 61/775,915 под названием “Power Savings Mode for Ocean Bottom Seismic Data Acquisition Systems”, поданной 11 марта 2013 г., и которая, таким образом, включена посредством ссылки в полном объеме для всех целей.
Уровень техники
Область техники, к которой относится изобретение
[0002] Настоящее изобретение, в общем случае, относится к получению сейсмических данных и, в частности, к океанским донным системам получения сейсмических данных.
Описание уровня техники
[0003] В традиционной морской сейсмической разведке, судно буксирует сейсмический источник, например решетку пневмопушек, который периодически излучает акустическую энергию в воду для проникновения в морское дно. Датчики, например гидрофоны, геофоны и акселерометры, могут быть заключены в блоках датчиков на датчиковых узлах, периодически разнесенных по длине океанского донного кабеля (ОДК), покоящегося на морском дне. Альтернативно, множество автономных датчиковых узлов, каждый из которых содержит один или более сейсмических датчиков может быть установлено на морском дне. Датчики датчикового узла выполнены с возможностью контроля акустической энергии, отраженной от границ между слоями в геологических пластах. Гидрофоны обнаруживают изменения акустического давления; геофоны и акселерометры, которые являются датчиками движения, контролируют движение частиц, обусловленное отраженной сейсмической энергией. Сигналы от этих видов датчиков, используются для картирования геологических пластов.
[0004] Мощность, необходимая для работы датчиковых узлов, может обеспечиваться через батареи и/или электрогенераторы. Например, в системах ОДК, кабель может быть подключен к поверхностному бую или сейсмическому судну, содержащему генератор, например, дизель-генератор. Генератор может обеспечивать питание для эксплуатации датчиков либо непосредственно, либо опосредованно (например, через аккумуляторные батареи). В системе на основе автономных датчиковых узлов, аккумуляторные батареи могут быть включены в каждый узел для обеспечения питания узла.
Сущность изобретения
[0005] Настоящее изобретение, в общем случае, относится к получению сейсмических данных и, в частности, к океанским донным системам получения сейсмических данных.
[0006] Один вариант осуществления изобретения предусматривает способ сбора морских сейсмических данных. Способ, в общем случае, содержит эксплуатацию датчикового узла в неактивном режиме, причем неактивный режим выполнен с возможностью экономии энергопотребления датчиковым узлом, и определение, ожидаются ли сейсмические данные на датчиковом узле. Способ дополнительно содержит эксплуатацию датчикового узла в активном режиме в ответ на определение, что сейсмические данные ожидаются, и сбор сейсмических данных, при нахождении в активном режиме.
[0007] Другой вариант осуществления изобретения предусматривает способ проведения сейсморазведки. Способ, в общем случае, содержит размещение множества датчиковых узлов на морском дне, причем запускают эксплуатацию датчиковых узлов в неактивном режиме, запуск эксплуатации катера с сейсмическим источником, причем катер с сейсмическим источником выполнен с возможностью генерации сигнала на датчиковые узлы, и избирательное регулирование режима работы одного или более датчиковых узлов из неактивного режима в активный режим на основании близости одного или более датчиковых узлов к катеру с источником, причем близость определяют на основании сигнала.
[0008] Еще один вариант осуществления изобретения предусматривает океанский донный сейсмический датчиковый узел, в общем случае, содержащий процессор, по меньшей мере, один акустический датчик, по меньшей мере, один датчик движения частиц и память. Память содержит программу выбора режима, которая, при выполнении процессором, выполнена с возможностью осуществлять операции, содержащие эксплуатацию датчикового узла в неактивном режиме, причем неактивный режим выполнен с возможностью снижать энергопотребление датчикового узла, определение, ожидаются ли сейсмические данные на датчиковом узле, в ответ на определение, что сейсмические данные ожидаются, эксплуатацию датчикового узла в активном режиме, и сбор сейсмических данных, при нахождении в активном режиме.
Краткое описание чертежей
[0009] Чтобы лучше понять, каким образом можно обеспечить вышеупомянутые признаки и преимущества и решить задачи настоящего изобретения, следует обратиться к более подробному описанию изобретения, кратко изложенного выше, приведенному со ссылкой на варианты осуществления, которые проиллюстрированы в прилагаемых чертежах.
[0010] Однако следует заметить, что прилагаемые чертежи иллюстрируют лишь типичные варианты осуществления этого изобретения и поэтому не призваны ограничивать его объем, поскольку изобретение допускает другие, столь же эффективные варианты осуществления.
[0011] Фиг. 1 - пример сейсморазведки согласно варианту осуществления изобретения.
[0012] Фиг. 2 - пример сейсморазведки согласно другому варианту осуществления изобретения.
[0013] Фиг. 3 - еще один пример сейсморазведки согласно варианту осуществления изобретения.
[0014] Фиг. 4 иллюстрирует датчиковый узел согласно варианту осуществления изобретения.
[0015] Фиг. 5 иллюстрирует устройство-концентратор согласно варианту осуществления изобретения.
[0016] Фиг. 6 - блок-схема иллюстративных операций, осуществляемых датчиковым узлом, согласно варианту осуществления изобретения.
[0017] Фиг. 7A-7B демонстрируют иллюстративный выходной сигнал акустического датчика, согласно варианту осуществления изобретения.
[0018] Фиг. 8 иллюстрирует вид в плане сейсморазведки согласно варианту осуществления изобретения.
[0019] Фиг. 9 - блок-схема иллюстративных операций, осуществляемых при проведении сейсморазведки согласно варианту осуществления изобретения.
Подробное описание предпочтительных вариантов осуществления
[0020] Варианты осуществления изобретения предусматривают способы, системы и устройство для экономии энергии при проведении океанской донной сейсморазведки. Датчиковые узлы, расположенные на дне океана, могут быть выполнены с возможностью работать, по меньшей мере, в неактивном режиме и неактивном режиме. Когда катер с сейсмическим источником приближается к датчиковому узлу, узел может регулировать свой режим работы из неактивного режима в активный режим. Когда катер с сейсмическим источником больше не находится вблизи датчикового узла, возможно возвращение в неактивный режим для экономии энергии.
[0021] Теперь обратимся к вариантам осуществления изобретения. Однако следует понимать, что изобретение не ограничивается конкретными описанными вариантами осуществления. Напротив, для реализации и практического применения изобретения можно рассматривать любую комбинацию нижеследующих признаков и элементов, относящихся к различным вариантам осуществления или нет. Кроме того, в различных вариантах осуществления, изобретение обеспечивает многочисленные преимущества над уровнем техники. Однако, хотя варианты осуществления изобретения могут обеспечивать преимущества над другими возможными решениями и/или над уровнем техники, достижение или недостижение конкретного преимущества данным вариантом осуществления не ограничивает изобретение. Таким образом, нижеследующие аспекты, признаки, варианты осуществления и преимущества являются всего лишь иллюстративными и не считаются элементами или ограничениями нижеследующей формулы изобретения, если это в явном виде не указано в формуле изобретения. Аналогично, ссылку на “изобретение” не следует рассматривать как обобщение какого-либо раскрытого здесь предмета изобретения и не следует рассматривать как элемент или ограничение нижеследующей формулы изобретения, если это в явном виде не указано в формуле изобретения.
[0022] Один вариант осуществления изобретения реализован в виде программного продукта для использования с компьютеризированной системой. Программа программного продукта задает функции вариантов осуществления (в том числе, описанные здесь способы) и может содержаться на различных компьютерно-считываемых носителях. Иллюстративные компьютерно-считываемые носители включают в себя, но без ограничения: (i) неперезаписываемые носители данных для постоянного хранения информации (например, постоянные запоминающие устройства в компьютере, например, диски CD-ROM, читаемые приводом CD-ROM); (ii) перезаписываемые носители данных для временного хранения информации (например, флоппи-диски в дисководе или жесткие диски); (iii) среду передачи данных для переноса информации на компьютер, например, беспроводную сеть. Последний вариант осуществления, в частности, включает в себя загрузку информации из интернета и других сетей. Такие компьютерно-считываемые носители, несущие машиночитаемые инструкции, которые определяют функции настоящего изобретения, представляют варианты осуществления настоящего изобретения.
[0023] В целом, процедуры, выполняемые для реализации вариантов осуществления изобретения, могут входить в состав операционной системы или конкретного приложения, компонента, программы, модуля, объекта или последовательности инструкций. Компьютерная программа настоящего изобретения обычно состоит из большого количества инструкций, которые транслируются "родным" компьютером в машиночитаемый формат и, таким образом, исполнимые инструкции. Кроме того, программы состоят из переменных и структур данных, которые размещаются локально относительно программы или находятся в памяти или на запоминающих устройствах. Кроме того, различные программы, описанные далее, можно идентифицировать на основании применения, для которого они реализованы в конкретном варианте осуществления изобретения. Однако очевидно, что любая нижеследующая конкретная номенклатура программ используется лишь для удобства, и, таким образом изобретение не подлежит ограничению использованием исключительно в каком-либо конкретном приложении, идентифицированном и/или предусмотренном такой номенклатурой.
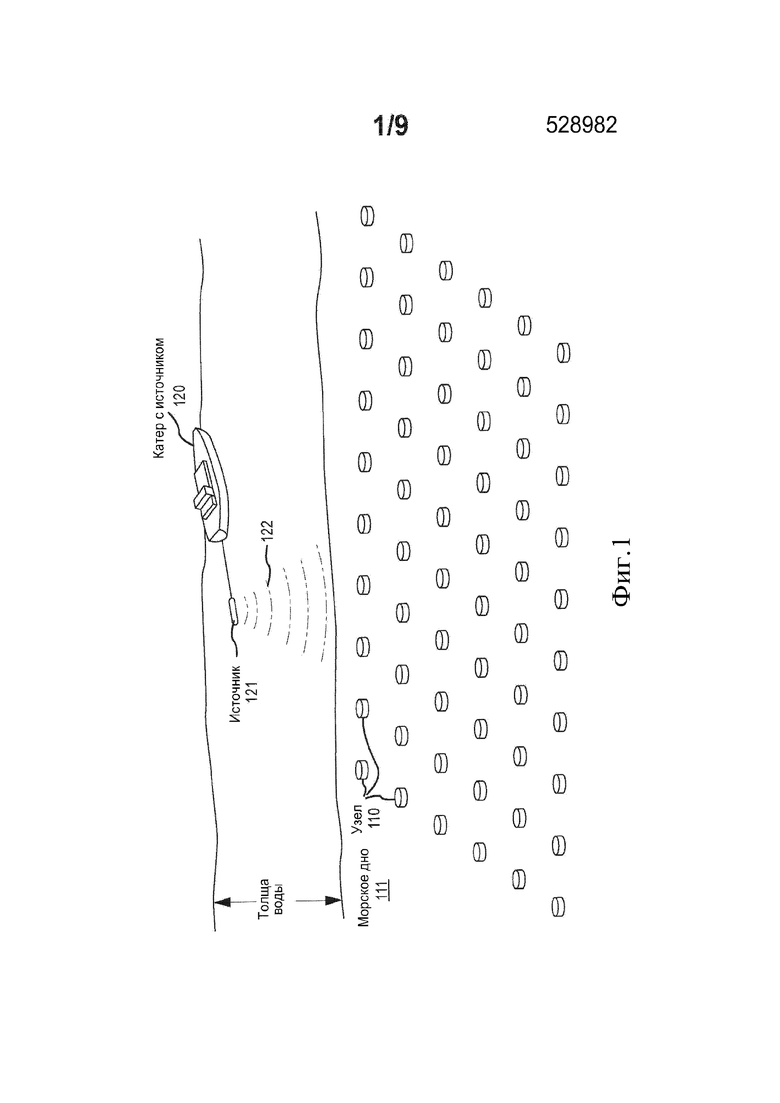
[0024] На фиг. 1 показана иллюстративная сейсморазведка согласно варианту осуществления изобретения. На морском дне 111 может быть установлено множество автономных датчиковых узлов 110. Для установки автономных датчиковых узлов 110 можно использовать любое пригодное средство. Например, в одном варианте осуществления, датчиковые узлы 110 могут быть установлены на морском дне с использованием дистанционно управляемого транспортного средства (ROV, не показано). Альтернативно, каждый из автономных датчиковых узлов 110 может быть присоединен к тросу и устанавливаться на морском дне непосредственно с катера. В еще одном варианте осуществления, каждый автономный датчиковый узел может быть оборудован и запрограммирован для навигации через толщу воды в заранее определенные положения на морском дне и из них.
[0025] Хотя здесь идет речь о морском дне, варианты осуществления изобретения не ограничиваются использованием в морских условиях. Напротив, варианты осуществления изобретения можно использовать в любых морских условиях, в том числе, океанах, озерах, реках и т.д. Соответственно, используемый в дальнейшем термин "море", морское дно, и пр., следует в широком смысле, подразумевающем все водоемы.
[0026] Согласно фиг. 1, катер 120 с источником может быть выполнен с возможностью буксировать сейсмический источник 121 при проведении сейсморазведки. В одном варианте осуществления, сейсмический источник 121 может представлять собой пневмопушку, выполненную с возможностью выпускать заряд сжатого воздуха в толщу воды к морскому дну 111. Как показано на фиг. 1, заряд сжатого воздуха генерирует сейсмические волны 122, которые могут распространяться к морскому дну 111 и проникать в пласты под морским дном и/или отражаться от них. Отражения от пластов под морским дном могут регистрироваться узлами 110 как сейсмические данные, которые затем можно обрабатывать для формирования изображений пластов под морским дном. Геологи могут анализировать эти изображения для идентификации областей, которые с высокой степенью вероятности содержат углеводороды или другие вещества, представляющие интерес.
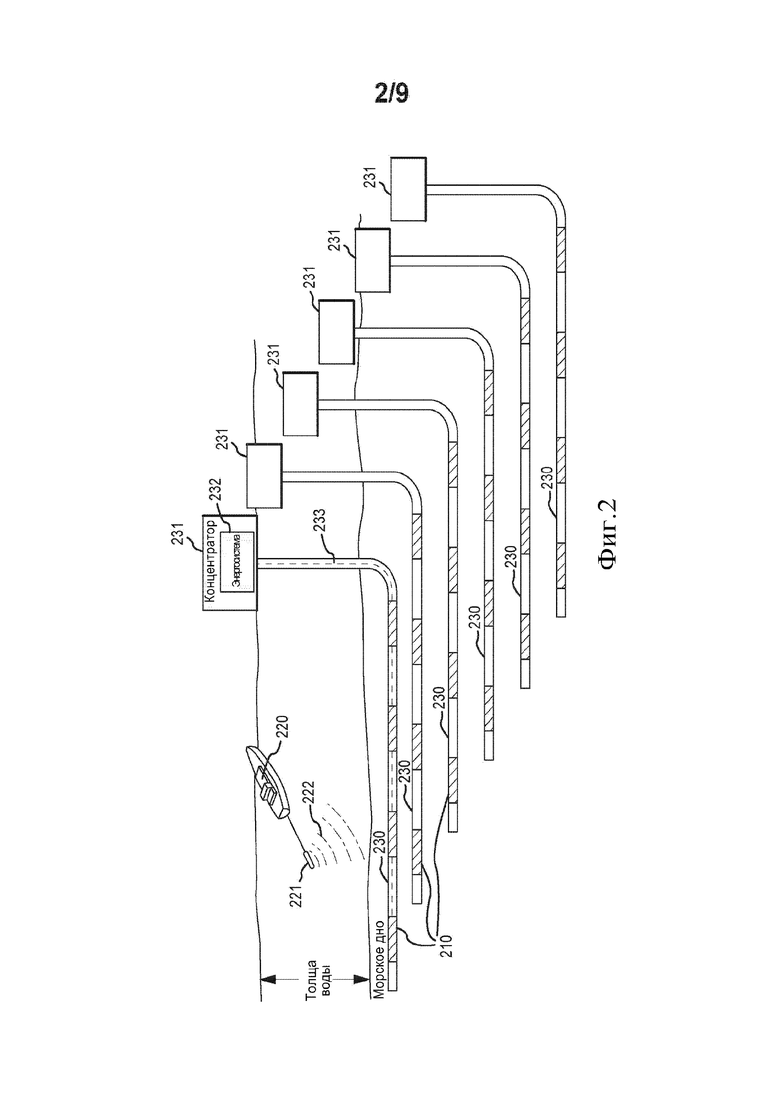
[0027] Фиг. 2 иллюстрирует другой пример сейсморазведки согласно варианту осуществления изобретения. Как показано на фиг. 2, множество датчиковых узлов 210 может располагаться в каждом из одного или более донных кабелей (ОДК) 230. В одном варианте осуществления, ОДК могут быть подключены к соответствующему поверхностному бую 231. Поверхностные буи могут включать в себя системы хранения сейсмических данных, выполненные с возможностью хранения сейсмических данных, собранных датчиковыми узлами 210. Поверхностные буи 231 также могут включать в себя энергосистему 232. Энергосистема 232, в одном варианте осуществления, может включать в себя один или более из генератора, например, дизель-генератора, одной или более аккумуляторных батарей, топливного элемента и пр.
[0028] Кабель 233 может быть включен в каждый из ОДК 230 для переноса мощности, данных, инструкций и пр. от поверхностного буя 231 на датчиковые узлы 210 в ОДК. В одном варианте осуществления, кабель 233 может включать в себя множество линий передачи. Например, первое множество линий передачи может быть выполнено с возможностью переноса данных между датчиковыми узлами и буем 231, второе множество линий данных может быть выполнено с возможностью переноса инструкций между датчиковыми узлами и буем 231, и третьи одна или более линий передачи могут переносить мощность от буя 231 на датчиковые узлы. В альтернативных вариантах осуществления, один и тот же набор линий передачи можно использовать для переноса одного или более из сейсмических данных, инструкций и/или мощности. Кроме того, хотя здесь рассмотрен единый кабель 233, в альтернативных вариантах осуществления, можно использовать множество отрезков кабеля для переноса сейсмических данных, инструкций и мощности между датчиковыми узлами 210 и соответствующим буем 231.
[0029] В одном варианте осуществления изобретения, датчиковые узлы 210 могут быть соединены друг с другом последовательно. Поэтому каждый узел может быть выполнен с возможностью приема и переноса инструкций, данных, мощности и т.д. от первого узла ко второму узлу. В альтернативном варианте осуществления, датчиковые узлы 210 могут быть соединены параллельно через кабель 233. Другими словами, каждый датчиковый узел 210 может быть напрямую подключен к поверхностному бую 231 через кабель 233. В других вариантах осуществления, датчиковые узлы могут быть соединены в любой комбинации последовательных и параллельных соединений друг с другом, и прямого и косвенного соединения с поверхностным буем.
[0030] Хотя на фиг. 2 показано, что каждый кабель 230 соединен с своим собственным соответствующим поверхностным буем 231, в альтернативных вариантах осуществления, к одному бую 231 может быть подключено несколько кабелей 230. В других вариантах осуществления изобретения, поверхностные буи 231 можно исключить, и кабели 230 могут быть подключены к катеру регистрации, который может включать в себя оборудование регистрации и генерации мощности для поддержки датчиковых узлов 210.
[0031] Фиг. 2 дополнительно иллюстрирует катер 220 с источником, сейсмический источник 221 и сейсмические волны 222, которые соответствуют катеру 120 с источником, сейсмическому источнику 121 и сейсмическим волнам 122, соответственно. Хотя в каждой из фиг. 1 и 2 показан один источник 121 и 221, в альтернативных вариантах осуществления, при проведении сейсморазведки можно использовать множество источников. Когда используется множество источников, источники могут располагаться в решетке источников, которая буксируется катером с источником.
[0032] Хотя датчиковые узлы 210 изображены заключенными в оболочку океанского донного кабеля, в альтернативных вариантах осуществления, датчиковые узлы 210 могут не быть заключены, как показано. В таких альтернативных вариантах осуществления, датчиковые узлы могут быть независимыми отдельными устройствами, подвергающимися воздействию воды, и могут быть подвешены на едином кабеле или отрезках кабеля. Соответственно, термин “океанский донный кабель” означает любую пригодную компоновку датчиковых узлов, в которой множество датчиковых узлов физически подключены друг к другу, независимо от того, заключены ли они в оболочку кабеля.
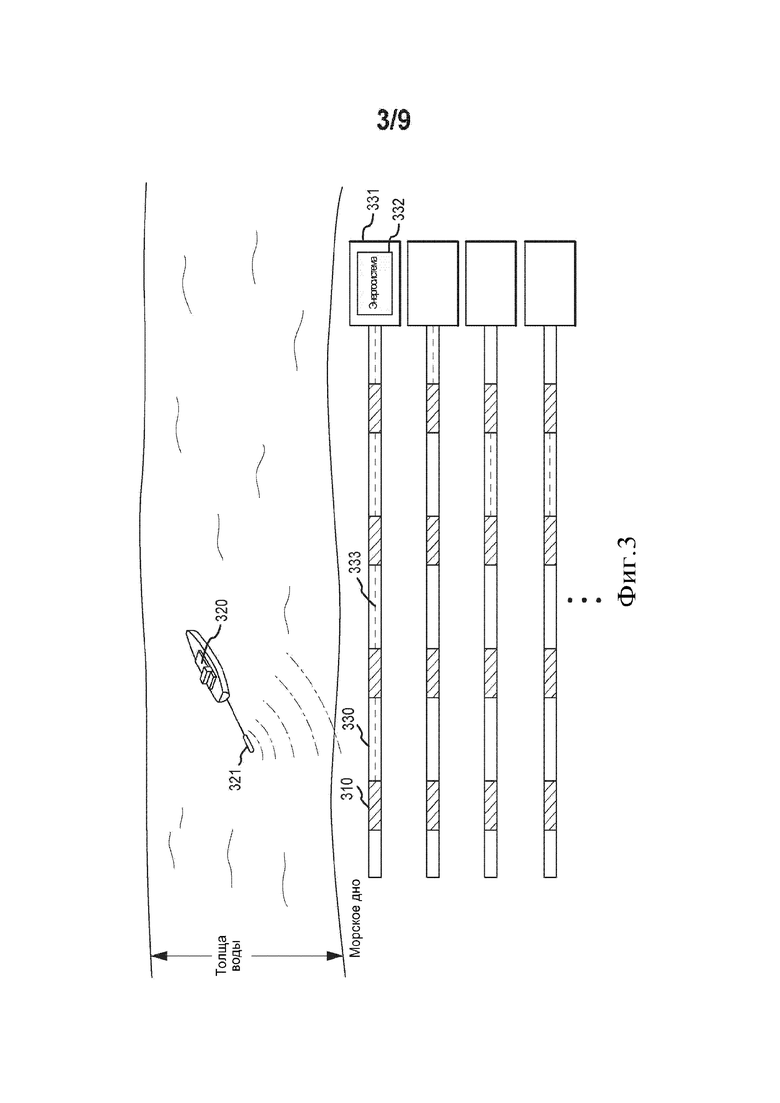
[0033] Фиг. 3 иллюстрирует еще один вариант осуществления изобретения. Аналогично фиг. 2, сейсморазведка, показанная на фиг. 3, также может включать в себя катер 320 с источником, буксирующий один или более сейсмических источников 321 и множество океанских донных кабелей 330, каждый из которых содержит множество узлов 310. Однако, в отличие от фиг. 2, океанские донные кабели 330 могут быть подключены к подводному концентратору 331 вместо поверхностного буя. В одном варианте осуществления, как показано на фиг. 3, подводный концентратор 331 может располагаться на морском дне. Альтернативно, в других вариантах осуществления, подводный концентратор может быть выполнен с возможностью плавать на заранее заданном расстоянии над морским дном или на заранее заданном расстоянии под поверхностью воды. Использование подводных концентраторов 330 может быть особенно преимущественным, например, в арктических условиях, где поверхность моря может замерзать и/или может включать в себя движущиеся массы льда, которые могут сталкиваться с поверхностными буями и разрушать их.
[0034] Как в случае поверхностного буя 231, показанного на фиг. 2, подводный концентратор 331 также включает в себя энергосистему 332 (которая аналогична энергосистеме 232), и силовой кабель 333 (который аналогичен силовому кабелю 233) для обеспечения питания узлов 310.
[0035] Фиг. 4 иллюстрирует более детальный вид датчикового узла 400 согласно варианту осуществления изобретения. Датчиковый узел может быть примером любого из датчиковых узлов 110, 210 и 310, проиллюстрированных, соответственно, на фиг. 1, 2 и 3, но не ограничивается этими вариантами осуществления. Как показано на фиг. 4, датчиковый узел 400 может включать в себя центральный процессор (CPU) 411, память 412, один или более сейсмических датчиков 420, хранилище 416, одно или более часовых устройств 430 и устройство 419 сетевого интерфейса и энергонакопительную систему 440. Хотя на фиг. 4 показан один CPU 411, в альтернативных вариантах осуществления, в узле 400 может быть реализовано несколько CPU.
[0036] Устройством 419 сетевого интерфейса может быть любое входное/выходное устройство, выполненное с возможностью обеспечивать сетевые соединения между датчиковым узлом 400 и другим устройством, например, другим датчиковым узлом, поверхностным буем или донным концентратором и т.п., через сеть, например, беспроводную сеть, кабели 233 и 333 показанные на фиг. 2 и 3, и т.п. В одном варианте осуществления, устройство 419 сетевого интерфейса может быть сетевым адаптером или другой картой сетевого интерфейса (NIC).
[0037] Хранилище 416, предпочтительно, представляет собой запоминающее устройство прямого доступа (DASD). Хотя оно показано как единичный блок, оно может быть комбинацией стационарных и/или сменных запоминающих устройств, например, стационарных приводов диска, приводов флоппи-диска, лентопротяжных механизмов, сменных карт памяти или оптического запоминающего устройства. Память 412 и хранилище 416 могут быть частью одного виртуального адресного пространства, охватывающего несколько первичных и вторичных запоминающих устройств.
[0038] Сейсмические датчики 420 могут быть выполнены с возможностью регистрации сейсмических сигналов. В одном варианте осуществления, сейсмические датчики могут включать в себя один или более датчиков 414 движения частиц и один или более акустических датчиков 415, как показано на фиг. 4. Акустические датчики 415 могут быть выполнены с возможностью измерения волнового поля давления. В одном варианте осуществления, акустическим датчиком может быть гидрофон. Датчики движения частиц могут быть выполнены с возможностью обнаружения, по меньшей мере, одного компонента движения частиц, связанного с акустическим сигналом. Примеры датчиков движения частиц включают в себя геофоны, датчики смещения частиц, датчики скорости частиц, акселерометры или их комбинацию.
[0039] Часовые устройства 430 можно использовать для определения времен прихода различных акустических сигналов. Как показано на фиг. 4, часовые устройства 430 могут включать в себя часовое устройство 417 высокой точности и часовое устройство 418 низкой точности, согласно одному варианту осуществления. Часовое устройство 417 высокой точности можно использовать для эксплуатации датчикового узла в режиме получения или активном режиме, и часовое устройство 418 низкой точности можно использовать для эксплуатации устройства в неактивном или спящем или энергосберегающем режиме, что будет более подробно описано ниже.
[0040] Энергонакопительная система 440 может быть выполнена с возможностью обеспечения питания для работы датчикового узла 400. В одном варианте осуществления, энергонакопительная система 440 может быть системой аккумуляторных батарей, включающей в себя одну или более батарей, выполненных, например, из никель-кадмиевых (NiCd), никель-цинковых (NiZn), никель-металлогидридных (NiMH) и/или литий-ионных (Li-ion) элементов. В альтернативном варианте осуществления, энергонакопительная система может включать в себя топливный элемент. Иллюстративные виды топлива, которые можно использовать в качестве топлива в топливном элементе, включают в себя водород, углеводороды, например, природный газ или дизельное топливо и спирты, например метанол. В некоторых вариантах осуществления, комбинация разных типов энергонакопительных систем может интегрироваться в энергонакопительной систему 440 для обеспечения питания датчикового узла 400.
[0041] В одном варианте осуществления изобретения, энергонакопительная система может пополняться из внешнего источника. Например, в батарейном накопителе энергии, включенном в вариант осуществления ОДК, кабель (например, кабели 233 и 333) можно использовать для периодической подзарядки энергонакопительной системы.
[0042] Память 412, предпочтительно, представляет собой оперативную память, достаточно большую, чтобы удерживать необходимые программы и структуры данных изобретения. Хотя память 412 показана как единичный объект, следует понимать, что память 412 может фактически содержать множество модулей, и память 412 может существовать на нескольких уровнях, от высокоскоростных регистров и блоков кэш-памяти до более низкоскоростных, но более крупных микросхем DRAM.
[0043] Иллюстративно, память 412 содержит операционную систему 413. Иллюстративные операционные системы, которые предпочтительно использовать, включают в себя Linux (Linux это товарный знак Linus Torvalds в США, других странах или и там и там). В более общем случае, здесь можно использовать любую операционную систему, поддерживающую раскрытые функции.
[0044] Также показана память 412, содержащая программу 423 выбора режима, которая, при выполнении на CPU 411, обеспечивает поддержку выбора режима эксплуатации для датчикового узла 400. Например, программа 423 выбора режима может быть выполнена с возможностью определять заранее заданный режим, выбранный из набора заранее заданных режимов работы для эксплуатации датчикового узла. Иллюстративный режимы работы может включать в себя активный режим или рабочий режим и спящий или неактивный или энергосберегающий режим, что будет более подробно описано ниже. Хотя программа 423 выбора режима показана отдельной от операционной системы 413 на фиг. 4, в альтернативных вариантах осуществления, программа 423 выбора режима может быть частью операционной системы или другой программы.
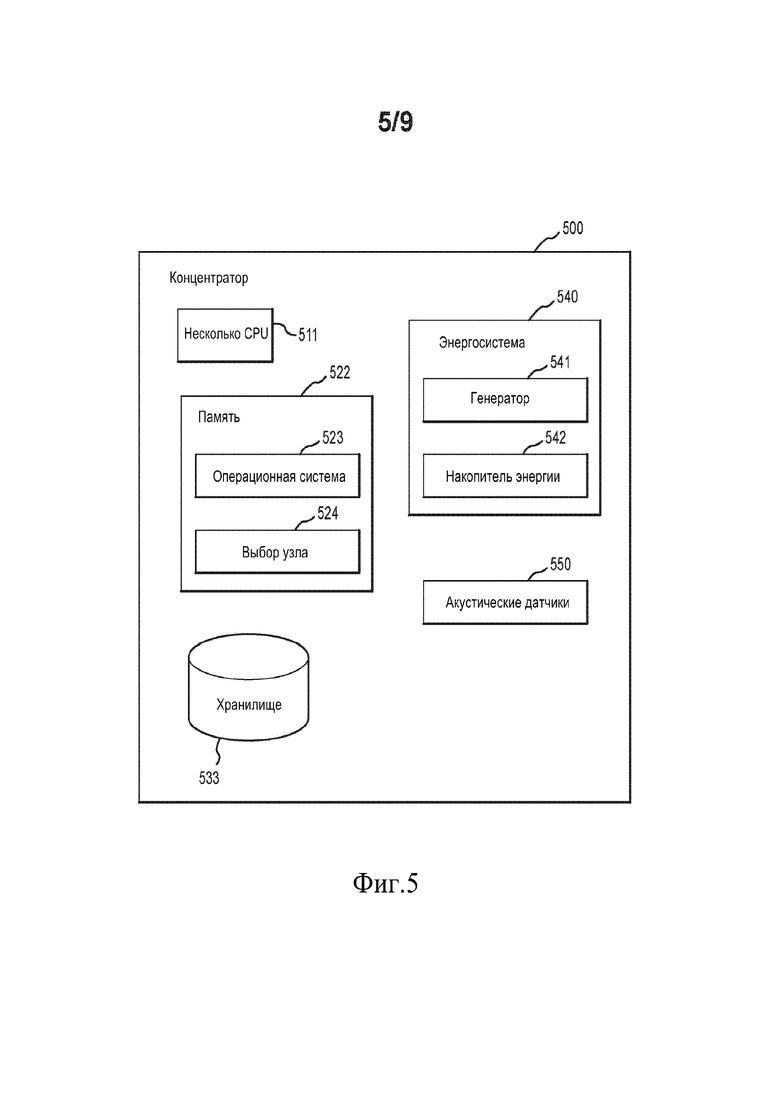
[0045] На фиг. 5 показан пример иллюстративного устройства-концентратора 500, согласно варианту осуществления изобретения. Устройство-концентратор 500 может быть примером поверхностного буя 231, показанного на фиг. 2, и донного концентратора 331, показанного на фиг. 3. Концентратор 500 может физически располагаться аналогично датчиковому узлу 400. Соответственно, концентратор 500 показан, в общем случае, содержащим один или более CPU 511, память 522 и запоминающее устройство 533.
[0046] Память 522 может представлять собой оперативную память, достаточно большую, чтобы удерживать необходимые программы и структуры данных, которые располагаются на концентраторе 500. Как показано на фиг. 5, память 522 может включать в себя операционную систему 523 и программу 524 выбора узла. В одном варианте осуществления, программа 524 выбора узла может быть выполнена с возможностью предписывать одному или более датчиковым узлам, связанным с устройством-концентратором, входить в один из заранее заданных режимов работы, что будет более подробно описано ниже.
[0047] Концентратор 500 также может включать в себя энергосистему 540. Как показано на фиг. 5, энергосистема 540 может включать в себя электрогенератор 541 и энергонакопительную систему 542. Энергонакопительная система 542 аналогично может быть энергонакопительной системой 440, показанной на фиг. 4, и может включать в себя, например, одну или более батарей. Электрогенератор может быть электрогенератором любого типа, например, дизель-генератором, топливным элементом, солнечными панелями и пр. В целом, энергия, генерируемая генератором 541 и/или энергия, запасенная в энергонакопительной системе 542, может поступать на один или более датчиковых узлов. Например, датчиковые узлы могут быть выполнены с возможностью работы на основании такой подаваемой мощности, в одном варианте осуществления. Альтернативно, такую подаваемую мощность можно использовать для подзарядки энергонакопительной системы 440 в датчиковых узлах.
[0048] В одном варианте осуществления, концентратор 500 может включать в себя один или более акустических датчиков 550. Акустические датчики 550 могут облегчать связь между концентратором 500 и катером с источником, что будет более подробно описано ниже.
[0049] В ходе сейсморазведочных работ, проиллюстрированных на фиг. 1-3, суммарная площадь морского дна, которая может быть покрыта разведочными операциями, может составлять несколько сотен, а то и тысяч, квадратных миль. Установка автономных датчиковых узлов и/или океанских донных кабелей на морском дне может занимать несколько дней, а то и недель. Фактические разведка и сбор сейсмических данных сами по себе могут продолжаться несколько месяцев. Кроме того, такие события, как плохая погода, отказы в системах установки датчиковых узлов и пр. могут привносить большие задержки, которые в ряде случаев могут длиться несколько дней.
[0050] С учетом большой продолжительности времени, в течение которого датчиковые узлы могут оставаться на океанском дне, важно иметь достаточную мощность для работы датчиковых узлов, пока они находятся на морском дне. Однако суммарная доступная мощность в системах накопления и генерации энергии датчиковых узлов и концентраторов может быть только достаточно для работы датчиковых узлов в течение нескольких недель. Варианты осуществления изобретения предусматривают способы, системы и устройство для эффективного использования доступной мощности для увеличения срока службы датчиковых узлов, пока они находятся на дне океана.
[0051] В одном варианте осуществления изобретения, датчиковые узлы могут быть выполнены с возможностью работы в одном из нескольких заранее заданных режимов работы. Например, один режим работы может включать в себя активный режим. В активном режиме, все или большинство компонентов датчикового узла могут быть полностью запитаны. Вход в активный режим может осуществляться тогда, когда ожидается сбор сейсмических данных.
[0052] Датчиковые узлы также могут быть выполнены с возможностью работы в спящем/неактивном/энергосберегающем режиме (далее именуемом просто неактивным режимом). В неактивном режиме, датчиковый узел может быть выполнен с возможностью отключения питания одного или более устройств и/или эксплуатации определенных устройств в режиме малой мощности. Например, согласно фиг. 4, программа 423 выбора режима может быть выполнена с возможностью побуждать CPU 411 входить в энергосберегающий режим работы, находясь в неактивном режиме. В одном варианте осуществления, эксплуатация CPU 411 в режиме малой мощности может предусматривать динамическое масштабирование напряжения и/или динамическое масштабирование частоты, которое может изменять напряжение и/или тактовую частоту ядра CPU, таким образом, снижая энергопотребление CPU. В целом, любая технология, которая может снижать энергопотребление CPU, может быть реализована для снижения общего энергопотребления.
[0053] В одном варианте осуществления, программа 423 выбора режима может быть выполнена с возможностью выбирать конкретное часовое устройство для эксплуатации узла 400 на основании режима. Например, в активном режиме, программа выбора режима может выбирать часовое устройство 417 высокой точности для эксплуатации узла 400. Это можно делать поскольку, в активном режиме, сбор сейсмических данных может выполняться, и, таким образом может быть желательно использовать часовое устройство с более высокой точностью. Однако, поскольку часовое устройство 41 высокой точности может работать на более высоких частотах, оно может расходовать большую мощность, чем часовое устройство низкой точности. Соответственно, в неактивном режиме, программа 423 выбора режима может побуждать выбор часового устройства низкой точности для эксплуатации узла 400.
[0054] В одном варианте осуществления, программа 423 выбора режима может быть выполнена с возможностью отключать мощность одного или более устройств узла 400 на основании режима работы. Например, вход в неактивный режим осуществляется, когда сбор сейсмических данных не ожидается. Соответственно, можно отключать питание одного или более устройств, используемых для сбора сейсмических данных. Например, в одном варианте осуществления, в неактивном режиме питание датчиков движения частиц может отключаться, таким образом, значительно снижая энергопотребление узла 400. В одном варианте осуществления, питание запоминающего устройства 416 также может отключаться в неактивном режиме, поскольку сбора и сохранения сейсмических данных не ожидается.
[0055] Посредством избирательного отключения питания определенных устройств узла 400 и/или эксплуатации определенных устройств в режиме малой мощности при нахождении в неактивном режиме, варианты осуществления изобретения значительно снижают энергопотребление узла, таким образом, значительно увеличивая срок службы узла на морском дне при сборе сейсмических данных.
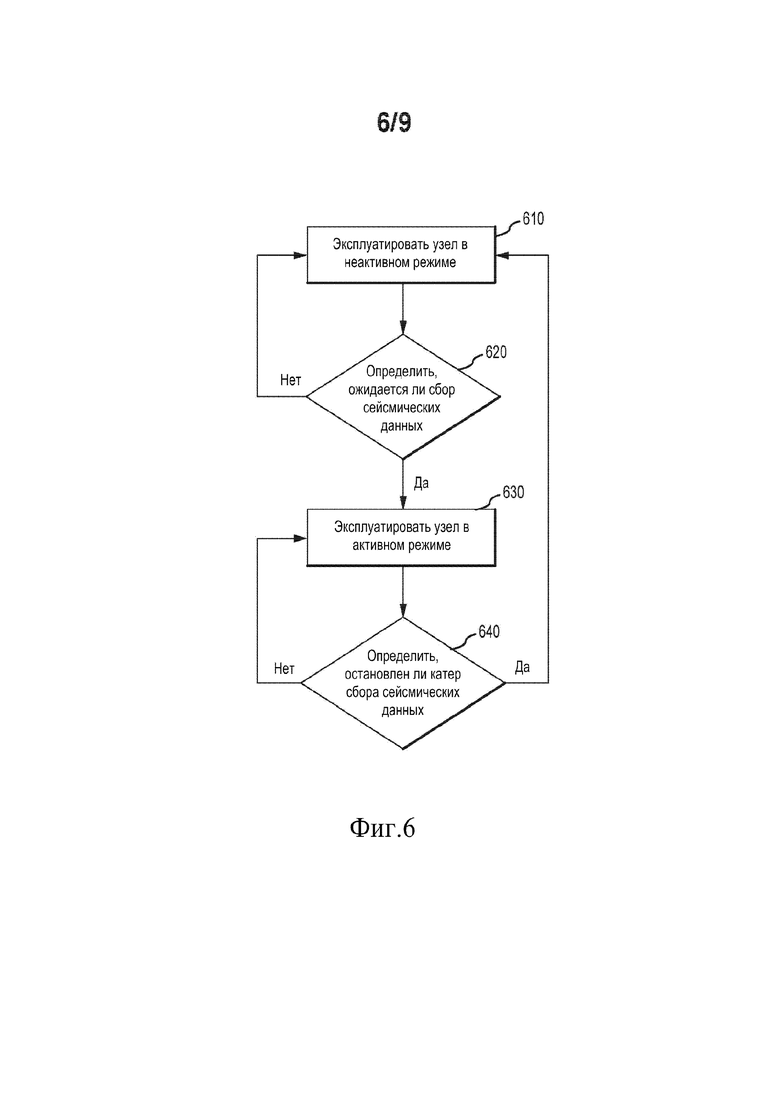
[0056] На фиг. 6 показана блок-схема иллюстративных операций, которые могут осуществляться программой 423 выбора режима, согласно варианту осуществления изобретения. Операции могут начинаться на этапе 610 с эксплуатации узла 400 в неактивном режиме. Как рассмотрено выше, эксплуатация узла 400 в неактивном режиме может предусматривать отключение питания одного или более устройств узла и/или эксплуатацию одного или более устройств в энергосберегающем режиме. На этапе 620, программа выбора режима может определять, ожидается ли сбор сейсмических данных.
[0057] Если на этапе 620 определено, что ожидается сбор сейсмических данных, то на этапе 630 программа выбора режима может эксплуатировать узел в активном режиме. Как рассмотрено выше, эксплуатация узла в активном режиме может предусматривать подачу питания на большинство, а, возможно, все устройства в узле. Кроме того, в активном режиме, снижение энергопотребления не всегда приоритетно. Соответственно, узловым устройствам, которые ранее находились в узле с низким энергопотреблением, может быть разрешено работать в режимах с более высоким энергопотреблением. Например, CPU 411 может работать при настройке наивысшей мощности, вместо часового устройства 418 низкой точности и пр. можно использовать часовое устройство 417 высокой точности.
[0058] Если же на этапе 620 определено, что сбор сейсмических данных не ожидается, то программа выбора режима может поддерживать узел в неактивном режиме (этап 610), как показано на фиг. 6.
[0059] На этапе 630, программа выбора режима может определять, остановлен ли сбор сейсмических данных. Если определено, что сбор сейсмических данных остановлен, процесс может переходить к этапу 610, на котором узел эксплуатируется в энергосберегающем режиме посредством программы 423 выбора режима. С другой стороны, если определено, что сбор сейсмических данных не остановлен, то программа выбора режима может продолжать эксплуатацию узла в активном режиме, как показано на фиг. 6.
[0060] Определение, ожидается ли сбор сейсмических данных (этап 620 на фиг. 6) может предусматривать связь между одним или более из датчиковых узлов, катером с сейсмическим источником и/или устройством-концентратором (например, поверхностным буем 231 и донным концентратором 331). Например, в одном варианте осуществления, датчиковые узлы могут быть выполнены с возможностью приема первого сигнала непосредственно от приближающегося катера с источником. После обнаружения первого сигнала, программа 423 выбора узла для узла может определять, что ожидается сбор сейсмических данных.
[0061] В альтернативном варианте осуществления, устройство-концентратор (например, концентратор 500 на фиг. 5) может быть выполнен с возможностью приема первого сигнала от катера с источником. После обнаружения первого сигнала, устройство-концентратор может переносить второй сигнал на один или более датчиковых узлов, связанных с устройством-концентратором. Второй сигнал может переноситься на один или более связанных узлов, например, через кабель, соединяющий устройство-концентратор с одним или более датчиковых узлов (например, кабели 233 и 333). В других вариантах осуществления, второй сигнал может быть электромагнитным сигналом или акустическим сигналом, который распознается одним или более связанными датчиковыми узлами. После приема второго сигнала, программа 423 выбора узла для датчикового узла может определять, что ожидается сбор сейсмических данных.
[0062] В одном варианте осуществления изобретения, первый сигнал, переносимый от катера с источником на датчиковые узлы или устройство-концентратор может быть акустическим сигналом. Акустический сигнал может генерироваться одним или более устройствами-источниками, которые буксируются катером с источником, согласно одному варианту осуществления. Датчиковые узлы и/или устройство-концентратор могут быть выполнены с возможностью принимать акустический сигнал и определять, что сигнал был сгенерирован катером с источником. Другими словами, датчиковые узлы и/или устройство-концентратор могут отличать сигналы, принятые от катера с источником, от другого шума, например внешнего шума, шума от морских животных, плещущихся в воде, шума от проводимых поблизости буровых работ и пр.
[0063] В одном варианте осуществления, акустические датчики в датчиковом узле и устройстве-концентраторе могут активно принимать сигналы, даже находясь в неактивном режиме, что позволяет им принимать акустические сигналы от катера с источником. Хотя здесь, в порядке примера, описана эксплуатация акустических датчиков в неактивном режиме, в альтернативных вариантах осуществления для приема сигналов от катера с источником можно использовать любой тип датчика. В целом, не все доступные датчики работают в режиме энергосбережения, одновременно поддерживая способность приема данных от катера с источником.
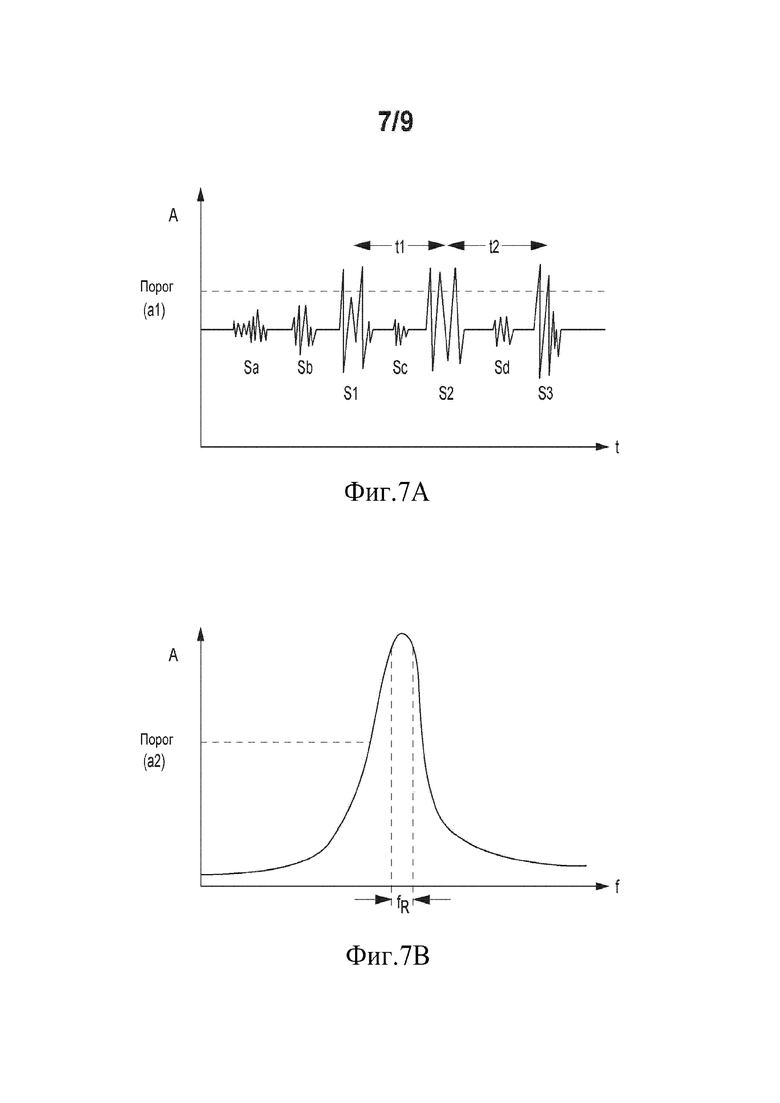
[0064] Фиг. 7A и 7B демонстрируют иллюстративный выходной сигнал акустического датчика, который можно использовать для идентификации сигналов от катера с источником. Фиг. 7A иллюстрирует выходной сигнал датчика как зависимость амплитуды (A) от времени (t). В одном варианте осуществления, сигнал можно идентифицировать как сигнал от катера с источником, только если сигнал выше заранее заданной пороговой амплитуды a1, показанной на фиг. 7A. Например, сигналы Sa и Sb на фиг. 7A ниже порога a1, и, таким образом, может отбрасываться как шум. С другой стороны, сигнал S1, выше заранее заданного порога a1 и, таким образом, может распознаваться как сигнал от катера с источником.
[0065] В некоторых вариантах осуществления, для дополнительного исключения возможности вторжения шума, датчиковые узлы и/или устройства-концентраторы могут быть выполнены с возможностью определения, принята ли заранее заданная последовательность сигналов. Например, согласно фиг. 7A, сигнал S2 принимается по истечении периода времени примерно t1 после сигнала S1, и сигнал S3 принимается по истечении периода времени примерно t2 после сигнала S2. Датчиковые узлы и/или устройства-концентраторы могут быть выполнены с возможностью идентификации заранее заданной последовательности сигналов с заранее заданными разделением, длительностью, частотой и пр. для определения, принят ли сигнал от катера с источником, что препятствует активации узлов в ответ на шум.
[0066] Фиг. 7B иллюстрирует выходной сигнал акустического датчика как зависимость амплитуды (A) от частоты (f). В одном варианте осуществления, датчиковые узлы и/или устройства-концентраторы может быть выполнен с возможностью определения, превышает ли сигнал заранее заданный порог a2 амплитуды, и что он попадает в заранее заданный диапазон Fr частот. В случае выполнения пороговых условий для амплитуды и частоты, сигнал можно идентифицировать в качестве сигнала от катера с источником.
[0067] Описанные здесь методы обнаружения сигнала предоставлены только в целях иллюстрации. В более общем случае, любой метод корреляции сигнала с источником с использованием, например, комбинации порогов амплитуды, диапазонов частот, заранее заданных последовательностей и пр. можно использовать для отличения сигналов катера с источником от шума. Кроме того, хотя акустические сигналы описаны как средство связи между катером с источником и узлами/устройствами-концентраторами, в альтернативных вариантах осуществления, для осуществления связи с использованием аналогичных методов различения шума можно использовать сигналы любого другого типа, включающие в себя электромагнитные сигналы.
[0068] Возвращаясь к этапу 640 на фиг. 6, определение, что получение сейсмических данных остановлено, может предусматривать определение, что катер с источником больше не активен вблизи датчикового узла (или устройства-концентратора). Один способ для определения этого предусматривает определение, истек ли заранее заданный период времени после приема акустического сигнала, имеющего заранее заданные характеристики, например, диапазон частот, амплитуду, правильность и пр.
[0069] На фиг. 8 показан вид в плане иллюстративной сейсморазведки согласно варианту осуществления изобретения. Как показано, катер 800 с сейсмическим источником движется в направлении D по решетке датчиковых узлов 810. В текущем положении P1 катера 800 с источником, множество узлов в зоне Z1, представленной сплошной окружностью, может находиться в активном режиме для сбора сейсмических данных. Другими словами, все узлы в пределах заранее заданного радиуса катера с источником могут находиться в активном режиме. Все узлы, полностью находящиеся за пределами зоны Z1, могут находиться в неактивном режиме. В одном варианте осуществления, радиус зоны Z1 может представлять расстояние, на которое целесообразно передавать первый сигнал от катера с источником до датчиковых узлов и/или устройства-концентратора.
[0070] Фиг. 8 также иллюстрирует предыдущее положение P2 катера 800 и предыдущую активную зону Z2. Как показано на фиг. 8, активная зона, или зона, в которой датчиковые узлы находятся в активном режиме, можно рассматривать как скользящие совместно с катером с источником. Хотя на фиг. 8 показана круглая активная зона, в альтернативных вариантах осуществления, активная зона может иметь любую другую форму, правильную или нет. В целом, является ли данный датчиковый узел активным узлом или нет, может зависеть от близости датчикового узла и/или устройства-концентратора к катеру с источником.
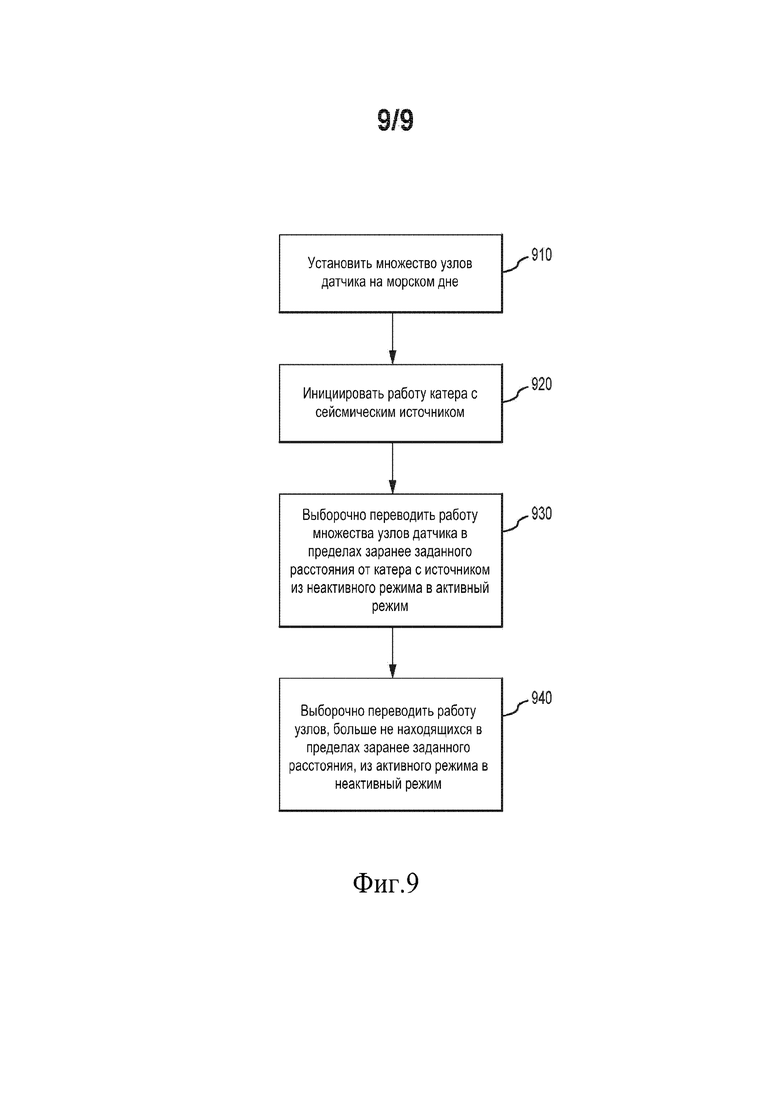
[0071] На фиг. 9 показана блок-схема иллюстративных операций, осуществляемых при проведении сейсморазведки согласно варианту осуществления изобретения. Операции могут начинаться на этапе 910 путем установки множества датчиковых узлов на морском дне, в котором датчиковые узлы инициированы в неактивном режиме. На этапе 920, получение сейсмических данных может инициироваться путем эксплуатации катера с сейсмическим источником. На этапе 930, при перемещении катера с источником, множество датчиковых узлов в пределах заранее заданного расстояния до катера с источником можно избирательно регулировать для эксплуатации в активном режиме для облегчения сбора сейсмических данных. На этапе 940, при перемещении катера с источником, датчиковые узлы, которые больше не находятся в пределах заранее заданного расстояния от катера с источником можно регулировать для эксплуатации в неактивном режиме.
[0072] Хотя вышеприведенное описание относится к вариантам осуществления настоящего изобретения, можно предложить другое и дополнительные варианты осуществления изобретения, не выходя за рамки его базового объема, который определяется нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ПЕРЕМЕННОЙ ПЛАВУЧЕСТИ И ПОДЪЕМА К ПОВЕРХНОСТИ ДЛЯ ОБЕСПЕЧЕНИЯ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2017 |
|
RU2744984C2 |
| Заякоренная профилирующая подводная обсерватория | 2015 |
|
RU2617525C1 |
| ЗАЯКОРЕННАЯ ПРОФИЛИРУЮЩАЯ ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2014 |
|
RU2545159C1 |
| СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ В РЕАЛЬНОМ ВРЕМЕНИ | 2023 |
|
RU2823651C1 |
| УСОВЕРШЕНСТВОВАННЫЙ СПОСОБ И УСТРОЙСТВО ДЛЯ ВОДНОЙ СЕЙСМОРАЗВЕДКИ | 2009 |
|
RU2538042C2 |
| СПОСОБ КОНТРОЛЯ ЛИНИИ ЭЛЕКТРОПИТАНИЯ, СОДЕРЖАЩЕЙСЯ В СЕЙСМИЧЕСКОМ КАБЕЛЕ, СООТВЕТСТВУЮЩАЯ СИСТЕМА И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ИНФОРМАЦИИ | 2015 |
|
RU2672768C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЁМНИКА ПРИ СЕЙСМОРАЗВЕДКЕ | 2002 |
|
RU2293362C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| Способ акустической локализации узлов сети транспондеров для определения положения гибкой протяженной буксируемой антенны | 2021 |
|
RU2797156C2 |


Изобретение относится к области геофизики и может быть использовано при проведении морских сейсморазведочных работ. Варианты осуществления изобретения предусматривают способы, системы и устройство для экономии энергии при проведении донной сейсморазведки. Датчиковые узлы, расположенные на дне океана, могут быть выполнены с возможностью работать, по меньшей мере, в активном режиме и неактивном режиме. Когда катер с сейсмическим источником приближается к датчиковому узлу, узел может регулировать свой режим работы из неактивного режима в активный режим. Когда катер с сейсмическим источником больше не находится вблизи датчикового узла, возможно возвращение в неактивный режим для экономии энергии. Технический результат – повышение точности получаемых данных. 3 н. и 20 з.п. ф-лы, 10 ил.
1. Способ сбора морских сейсмических данных, содержащий этапы, на которых:
эксплуатируют датчиковый узел в неактивном режиме, причем неактивный режим выполнен с возможностью экономии энергопотребления датчиковым узлом;
определяют, ожидаются ли сейсмические данные на датчиковом узле;
в ответ на определение того, что сейсмические данные ожидаются, эксплуатируют датчиковый узел в активном режиме; и
собирают сейсмические данные при нахождении в активном режиме,
причем определение того, ожидаются ли сейсмические данные на датчиковом узле, содержит прием сигнала от одного из катера с источником и устройства-концентратора, связанного с датчиковым узлом, причем сигнал указывает приближение катера с сейсмическим источником.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
определяют, не ожидаются ли больше сейсмические данные на узле; и
в ответ на определение того, что сейсмические данные больше не ожидаются, эксплуатируют датчиковый узел в неактивном режиме.
3. Способ по п. 1, в котором эксплуатация датчикового узла в неактивном режиме содержит этап, на котором эксплуатируют одно или более устройств датчикового узла в режиме малой мощности.
4. Способ по п. 1, в котором эксплуатация датчикового узла в неактивном режиме содержит этап, на котором отключают питание одного или более устройств датчикового узла.
5. Способ по п. 1, в котором сигнал задается по меньшей мере одним из:
заранее заданной пороговой амплитуды;
заранее заданного диапазона частот; и
заранее заданной последовательности сигналов.
6. Способ по п. 1, в котором сигнал является акустическим сигналом.
7. Способ по п. 6, в котором эксплуатация в неактивном режиме содержит этап, на котором эксплуатируют по меньшей мере один акустический датчик для обнаружения акустического сигнала.
8. Способ по п. 1, при этом датчиковый узел является автономным океанским донным узлом.
9. Способ по п. 1, при этом датчиковый узел входит в состав океанского донного кабеля, содержащего множество датчиковых узлов.
10. Способ проведения сейсморазведки, содержащий этапы, на которых:
размещают множество датчиковых узлов на морском дне, причем запускают эксплуатацию датчиковых узлов в неактивном режиме;
запускают эксплуатацию катера с сейсмическим источником, причем катер с сейсмическим источником выполнен с возможностью генерации сигнала на датчиковые узлы; и
избирательно регулируют режим работы одного или более датчиковых узлов из неактивного режима в активный режим на основании близости упомянутых одного или более датчиковых узлов к катеру с источником, причем близость определяют на основании упомянутого сигнала.
11. Способ по п. 10, дополнительно содержащий этапы, на которых избирательно регулируют режим работы упомянутых одного или более датчиковых узлов из активного режима в неактивный режим на основании близости упомянутых одного или более датчиковых узлов к катеру с источником.
12. Способ по п. 11, в котором регулировка режима работы из активного режима в неактивный режим содержит этап, на котором определяют, что сигнал не был принят от катера с источником в течение заранее заданного периода времени.
13. Способ по п. 10, в котором эксплуатация датчикового узла в неактивном режиме содержит этап, на котором эксплуатируют одно или более устройств датчикового узла в режиме малой мощности.
14. Способ по п. 10, в котором эксплуатация датчикового узла в неактивном режиме содержит этап, на котором отключают питание одного или более устройств датчикового узла.
15. Океанский донный сейсмический датчиковый узел, содержащий:
процессор;
по меньшей мере один акустический датчик;
по меньшей мере один датчик движения частиц; и
память, содержащую программу выбора режима, которая, при выполнении процессором, выполнена с возможностью осуществлять операции, содержащие:
эксплуатацию датчикового узла в неактивном режиме, причем неактивный режим выполнен с возможностью снижать энергопотребление датчикового узла;
определение того, ожидаются ли сейсмические данные на датчиковом узле;
в ответ на определение того, что сейсмические данные ожидаются, эксплуатацию датчикового узла в активном режиме; и
сбор сейсмических данных при нахождении в активном режиме,
причем определение того, ожидаются ли сейсмические данные на датчиковом узле, содержит прием сигнала от судна, причем сигнал указывает приближение судна с сейсмическим источником.
16. Датчиковый узел по п. 15, в котором программа выбора режима дополнительно выполнена с возможностью:
определять, не ожидаются ли больше сейсмические данные на узле; и
в ответ на определение, что сейсмические данные больше не ожидаются, эксплуатировать датчиковый узел в неактивном режиме.
17. Датчиковый узел по п. 15, в котором эксплуатация в неактивном режиме содержит эксплуатацию процессора в режиме малой мощности.
18. Датчиковый узел по п. 15, в котором эксплуатация в неактивном режиме содержит отключение питания упомянутого по меньшей мере одного датчика движения частиц.
19. Датчиковый узел по п. 15, в котором сигнал задается по меньшей мере одним из:
заранее заданной пороговой амплитуды;
заранее заданного диапазона частот; и
заранее заданной последовательности сигналов.
20. Датчиковый узел по п. 15, в котором сигнал является акустическим сигналом.
21. Датчиковый узел по п. 20, в котором эксплуатация в неактивном режиме содержит эксплуатацию по меньшей мере одного акустического датчика для обнаружения акустического сигнала.
22. Датчиковый узел по п. 15, при этом датчиковый узел является автономным океанским донным узлом.
23. Датчиковый узел по п. 15, при этом датчиковый узел входит в состав океанского донного кабеля.
| US 2012294112 A1, 22.11.2012 | |||
| US 2011317517 A1, 29.12.2011 | |||
| US 2007286022 A1, 13.12.2007 | |||
| CN 102809760 A, 05.12.2012. |

