Изобретение относится к способу и устройству, предназначенным для водной сейсморазведки. Общий принцип водной сейсморазведки такого типа включает развертывание на месте ряда параллельно расположенных и погруженных в воду сейсмических кабелей, сейсмоприемных линий или сейсмоприемных кос, на каждой из которых, с интервалом, размещены датчики, например гидрофоны и/или геофоны. Затем одно судно или несколько судов осуществляют буксировку кос со скоростью приблизительно 5 узлов, или приблизительно 9 км/ч, с разделением кос при помощи отводных щитков, называемых параванами.
В соответствии с тем же принципом другое судно или суда, называемые "источник", оснащенные средством возбуждения в морской среде волны, как правило, пневмопушкой, проходят на расстоянии от сейсмоприемных кос. После распространения соответствующим образом сформированных волн до морского дна и до различных геологических слоев производят замеры отраженных волн посредством упомянутых погруженных в воду улавливающих датчиков.
Судном-источником также может являться судно, буксирующее сейсмические косы. После этого всю информацию обрабатывают, получая трехмерное изображение геологии морского дна, как правило, служащее для прогнозирования запасов нефти.
Указанный метод применяют уже много лет, однако в отношении него действуют очень строгие ограничения, обусловленные, прежде всего, динамическими помехами измерения при улавливании волн, возникающими во время буксировки кос со скоростью 5 узлов.
Кроме того, возникающее вследствие буксировки сейсмических кос гидродинамическое сопротивление очень велико и составляет десятки тонн, например приблизительно 70 тонн, что приводит к необходимости использовать буксиры очень большой мощности.
Кроме того, вес и вызванное буксировкой гидродинамическое сопротивление вызывают у тянущего параваны кабеля динамическую деформацию, известную как "эффект струнной проволоки", приводящую к вибрациям во время буксировки. Она является причиной усталости и обрывов кабеля. С учетом остановки всего устройства стоимость замены чрезвычайно высока.
Сейсмические косы обычно погружены на небольшую глубину от 5 до 10 м, чем обусловлены как их повышенная чувствительность к метеорологическим условиям, шумам, порождаемым волнами и зыбью, так и вероятность повреждений из-за движения морских судов с большой осадкой, в частности танкеров, в том числе предназначенных для перевозки химикатов, а также контейнеровозов.
Более того, известные устройства сейсмической разведки в процессе выполнения замеров имеют теневые области. На практике сейсмические косы обычно имеют длину приблизительно 8 км, а интервал между ними составляет приблизительно 100 м, так что в случае использования приблизительно десяти параллельных кос это обеспечивает зону измерений 1×8 км.
При производстве замеров идеальной является изотропная система, то есть использующая зону с квадратной поверхностью, например 8×8 км. Однако указанные размеры не совпадают с возможностями буксировочных средств, если учесть вес, гидродинамическое сопротивление и логистику, необходимые для такой зоны измерений. Известны два подхода к исправлению сложившейся ситуации.
Первый подход, известный как "широкоазимутальная сейсморазведка", состоит в компенсации анизотропии благодаря использованию одного или двух судов, буксирующих комплект кос. Каждое из этих судов образует зону измерений 1×8 км. Кроме того, при этом используют от 2 до 8 судов-источников. Такая система имеет два основных недостатка. Во-первых, непомерно высокие расходы на оборудование, техническое обслуживание и эксплуатацию в результате использования от 2 до 8 судов-источников плюс один или два буксира плюс косы. Во-вторых, каждое судно-источник возбуждает волны по очереди, то есть в 2-8 раз реже, обеспечивая очень низкую частоту возбуждения.
Второй известный подход раскрыт в патенте GB 2435931, выданном на имя Western Geco, где описаны способ и соответствующее устройство, схематично представленное цепью геофонов, закрепленных на двухмерной структуре в виде сетки, или на трехмерной структуре. Эта система имеет периферию, названную периметром или внешней границей. Форму такой периферии поддерживают с помощью динамических средств сейсморазведки, например телеуправляемых аппаратов или маломерных судов, которые непрерывно буксируют, используя при этом сейсмический источник или группу сейсмических источников.
Несмотря на кажущуюся привлекательность таких теоретически правильно разработанных устройства и способа, реально использовать эту систему невозможно. На практике сформированная соответствующим образом конструкция имеет огромный вес и гидродинамическое сопротивление. Для ее поддержания необходимы нестандартные средства, непомерные как в техническом, так и в финансовом отношении. Кроме того, в конструкции системы предусмотрен только один вариант геометрии для цепи датчиков.
В соответствии с еще одним аспектом целью морской сейсмической разведки является прием или улавливание максимального количества сигналов и создание как можно более точной и достоверной геологической карты районов, расположенных под морским дном. Низкочастотные сигналы предоставляют информацию об очень глубоких продуктивных пластах и чрезвычайно ценны в этом отношении. Однако низкочастотные сигналы сильно ослаблены вследствие эффекта отражения от поверхности моря или ложных отраженных сигналов, "духов", и прежде всего из-за того, что в практике предшествующего уровня техники сейсмические косы погружают всего на несколько метров от поверхности. Итак, предприняты усилия по устранению "духов" и обеспечению "равномерного спектра".
Для исправления описанной ситуации используют метод "встречных зондов", состоящий в том, что на соответствующих глубинах, например 20 м и 26 м, размещают друг под другом две сейсмические косы с прикрепленными датчиками. Обработка комбинации двух сигналов, принятых от двух соответствующих кос, обеспечивает ослабление, или устранение последствий "духов". Однако помимо необходимости дополнительной обработки сигналов этому известному методу присущ серьезный недостаток, заключающийся в сильном снижении производительности и повышении затрат из-за двойного количества кос и датчиков.
Еще один известный метод, предназначенный для устранения "духов", предложен компанией PGS. Он состоит в использовании сейсмоприемных линий или сейсмических кос, на которых помимо измеряющих давление гидрофонов закреплены геофоны или акселерометры, позволяющие измерять скорость или ускорение волны.
Так как коэффициенты отражения в случае соответствующих измерений давления при помощи гидрофонов и скорости посредством геофонов противоположны по знаку и равны соответственно -1 и +1, то уничтожение "духов" теоретически возможно.
Этот известный метод имеет недостатки, заключающиеся в том, что необходимы большие вложения в датчики, и в том, что в результате буксировки со скоростью, составляющей приблизительно 5 узлов, возникают паразитные колебания и шумовые помехи, принимаемые геофонами или акселерометрами. Кроме того, оказалось, что производство замеров в диапазоне ниже 20-30 Гц при помощи используемых в этом методе геофонов и акселерометров невозможно.
Еще один известный метод заключается в использовании донной сейсморазведочной косы (ДСК). Для производства замеров донные косы необходимо уложить на морское дно, затем их поднимают на борт, буксируют к следующему пункту измерений и снова укладывают. Укладка требует тяжелых и сложных средств, например кабельных судов с динамическим позиционированием, а, кроме того, отнимает много времени. Следовательно, этот затратный и медленный способ невозможно рассматривать как достаточно рентабельный метод для удовлетворения предъявляемых в целом на рынке морской сейсмической разведки требований.
В документе FR 2795527 описана система подводной сейсмической разведки, в частности морского дна на больших глубинах. В этом методе разведки используют, по меньшей мере, одну измерительную гирлянду, в головной части которой предусмотрен погружной аппарат, а в хвостовой - инертный буй. Гирлянда состоит из не расширяющейся и не сжимающейся внутренней трубы и расширяющейся в радиальном направлении наружной трубы, расположенной коаксиально относительно внутренней трубы. Предусмотрены средства для введения жидкости в пространство между этими двумя трубами, регулирующие плавучесть гирлянды гидрофонов между отрицательным значением, при котором гирлянда покоится на дне моря, и положительным значением, при котором равновесное положение гирлянды над морским дном обеспечивает ее перемещение от одного места производства замеров к другому, во время которого операции по производству замеров не производятся. Следовательно, в указанном патентном документе рассмотрены только измерения, произведенные для покоящейся на дне моря гирлянды гидрофонов. На практике осуществление измерений в таких условиях не всегда выгодно с экономической точки зрения, не говоря уже о времени, затрачиваемом на каждую операцию по выполнению замеров - от момента, когда сейсмическую косу устанавливают на дне водоема, до перестановки ее в следующее место для выполнения замеров. Кроме того, вся конструкция имеет очень большой вес, так как донные косы, рассмотренные в указанном патентном документе, предназначены для установки на морском дне и, таким образом, имеют значительный вес в воде, а именно 8 кг - вес одного сенсорного модуля, или 2560 кг - вес датчиков одной косы, то есть 1462 кг приходится на километр одной кабельной линии, или в целом - 11 696 кг. Таким образом, вес донной косы в воде составляет 14 256 кг. Следовательно, чтобы удержать ее на глубине 100 м, необходимо вытеснить приблизительно 14 м3 жидкости, а это требует слишком большого расхода энергии - приблизительно 14 мегаджоулей.
В документе WO 00/67046 описан способ сейсмической разведки с использованием комплекта сейсмических кос. В соответствии с одним из вариантов его осуществления каждый из двух концов каждой сейсмической косы соединяют со средством для перемещения и перемещают косы до обеспечения требуемой конфигурации. Однако косы не располагают на заранее заданной глубине и выполняют замеры во время движения устройства, таким же образом, как при буксировке комплекта.
По сравнению с указанным выше, согласно изобретению предложены способ и устройство для водной сейсморазведки, решающие рассмотренные выше проблемы предшествующего уровня техники, и, в частности, обладающие, в частности, следующими преимуществами:
- обеспечен комплект сейсмических кос разной геометрии в соответствии с требованиями, без механических и гидродинамических ограничений, с учетом требований, в частности очень широкой геометрии, предназначенной для разведки на глубине и в сложных районах;
- обеспечен прием сигналов с "равномерным спектром" и минимальным уровнем шумов;
- отсутствие риска или опасности в связи с надводным судоходством;
- с одной стороны, использование только ограниченных по мощности средств для перемещения; с другой стороны, снижена потребность в судах-источниках;
- повышена экономичность капиталовложений, технического обслуживания и эксплуатации.
Изобретение предназначено для использования в любой акватории - на море, в озере или водохранилище, поэтому в описании и формуле изобретения, а также при использовании в надписях на чертежах термин "морской", в отношении отличающихся от моря акваторий, имеет значение "водный".
Исходя из указанного и в соответствии с одной из целей изобретения предложен способ водной сейсморазведки, включающий этапы:
- позиционируют погруженный в воду передвижной сейсмический источник, формирующий возмущение или возмущения, передаваемые через водную среду в виде волн, отражающихся от дна водоема и различных глубоких расположенных ниже геологических слоев;
- позиционируют, по меньшей мере, одну сейсмическую косу, предпочтительно ряд сейсмических кос, оснащенных рядом датчиков, улавливающих отраженные волны;
- указанный сейсмический источник приводят в действие однократно или многократно, создавая возмущение или ряд возмущений;
- указанные отраженные волны принимают, используя упомянутые датчики;
- изобретение, в частности, определено выполнением следующих действий;
- по меньшей мере, одну сейсмическую косу, содержащую датчики, устанавливают в пункте измерений в неподвижном или псевдонеподвижном положении - либо относительно водной среды, либо относительно дна водоема;
- по меньшей мере, одну сейсмическую косу во время измерения, с одной стороны, удерживают в состоянии натяжения посредством присоединенных к обоим ее концам телеуправляемых аппаратов, а с другой стороны, удерживают, по существу, на постоянной глубине более 5 м, предпочтительно в диапазоне от 20 м до 200 м, более предпочтительно в диапазоне от 50 м до 100 м;
- устройство в целом - с одной стороны, сейсмическую косу, а с другой стороны, сейсмический источник - перемещают к другому пункту измерений и снова выполняют действия согласно указанному способу.
Немаловажно, что по сравнению с различными способами и процессами, описанными в ссылках на предшествующий уровень техники, комплект сейсмических кос в процессе измерения не перемещают с помощью буксира, а удерживают в неподвижном или псевдонеподвижном положении.
В предпочтительном варианте осуществления изобретения датчики состоят либо только из гидрофонов, либо, в соответствии с предпочтительным вариантом, из комбинации гидрофонов и геофонов и/или акселерометров.
В соответствии с предпочтительным вариантом осуществления изобретения, носящим название "последовательная сейсморазведка", производят сбор данных, перемещая сейсмические косы между двумя пунктами измерений параллельно друг другу на расстояние или с шагом, лежащим в диапазоне от 100 до 600 м, предпочтительно в диапазоне от 200 до 400 м.
Как вариант, предусмотрен ряд, к примеру, из 5, 10 или 20 кос, расположенных параллельно друг другу.
Глубина погружения параллельных сейсмических кос составляет более 5 м, предпочтительно в диапазоне от 20 м до 200 м, или более предпочтительно в диапазоне от 50 м до 100 м. Сейсмические косы имеют длину от 4 км до 12 км, предпочтительно от 6 км до 10 км, предпочтительно 8 км, причем интервал между косами составляет от 100 м до 600 м, а датчики на косе устанавливают приблизительно через каждые 25 м, что составляет приблизительно 320 сенсорных модулей на одну косу, каждый модуль которой содержит гидрофон и геофон, или трехкоординатный акселерометр, или 4 датчика, и таким образом, общее количество датчиков составляет приблизительно 1280. В первом предпочтительном варианте конфигурации предусмотрена установка сенсорных модулей через каждые 12,5 м, с удвоением, таким образом, числа датчиков, приходящихся на одну сейсмическую косу. В другом предпочтительном варианте указанной конфигурации предусмотрено распределение датчиков по группам длиной 25 м или 12,5 м.
Предпочтительно предусмотрены средства, например телеуправляемые аппараты или их эквиваленты, обеспечивающие:
- удерживание каждой сейсмической косы в состоянии натяжения;
- удерживание каждой сейсмической косы в неподвижном положении;
- перемещение сейсмических кос.
Средства, удерживающие сейсмические косы на постоянной глубине, включают контейнеры с балластом, балласт, буи и/или подруливающие устройства.
Параллельные сейсмические косы позиционируют так, что в горизонтальной проекции их периметр образует прямоугольник, круг, овал, ромб или квадрат.
Предпочтительно, используют одно судно-источник, движущееся во время измерения, по существу, либо перпендикулярно, либо параллельно продольному направлению параллельных сейсмических кос.
Изобретение также относится к устройству для водной сейсморазведки, которое содержит:
- по меньшей мере, один погруженный в воду передвижной сейсмический источник, формирующий возмущение или возмущения, передаваемые через водную среду в виде волн, отражающихся от дна водоема и различных расположенных ниже геологических слоев;
- по меньшей мере, одну сейсмическую косу, предпочтительно ряд сейсмических кос, оснащенных рядом датчиков, предпочтительно гидрофонов и геофонов или акселерометров, улавливающих отраженные волны;
- средства для обнаружения и измерения волн;
- средства для перемещения сейсмического источника.
В соответствии с изобретением устройство также содержит:
- средства, обеспечивающие натяжение, по меньшей мере, одной сейсмической косы, присоединенные к обоим ее концам и обеспечивающие, с одной стороны, установку, по меньшей мере, одной сейсмической косы в пункте измерений в неподвижном или псевдонеподвижном положении, либо относительно водной среды, либо относительно дна водоема, а с другой стороны, перемещение, по меньшей мере, одной сейсмической косы от одного пункта измерений к следующему пункту измерений;
- средства, удерживающие сейсмическую косу при производстве замеров, по существу, на постоянной глубине более 5 м, предпочтительно от 20 м до 200 м, более предпочтительно от 50 м до 100 м;
- средства приведения источника в действие.
Средства для натяжения и перемещения, по меньшей мере, одной сейсмической косы предпочтительно состоят из телеуправляемых аппаратов или эквивалентных им средств, например маломерных судов, предпочтительно обеспечивающих натяжение приблизительно в несколько сот кгс, необходимое для поддержания приблизительно прямолинейной сглаженной формы сейсмической косы.
Стационарный относительно морской среды режим предполагает дрейф комплекта сейсмических кос. Следовательно, относительно окружающей воды сейсмические косы почти неподвижны. В «псевдостационарном режиме» происходит движение сейсмической косы в воде против осредненного течения, компенсирующее воздействие течения в продольном направлении в абсолютной системе координат, привязанной к морскому дну. Переменное остаточное течение вызывает только незначительное поступательное смещение сейсмической косы перпендикулярно ее направлению в абсолютной системе координат. В псевдонеподвижном режиме происходит движение сейсмических кос против осредненного течения, частично компенсирующее дрейф, вызванный осредненным течением. Несмотря на это, остаточное переменное течение вызывает незначительное поступательное смещение сейсмических кос, не влияющее на плотность сейсморазведки.
Датчики состоят из гидрофонов или из комбинации гидрофонов и геофонов.
Телеуправляемые аппараты или эквивалентные им средства, например маломерные суда, обеспечивают:
- удерживание каждой сейсмической косы в состоянии натяжения;
- удерживание каждой сейсмической косы в неподвижном положении;
- как вариант, перемещение сейсмических кос между двумя соседними пунктами измерений.
Согласно варианту осуществления изобретения для перемещения сейсмических кос используют течения в водоеме, в этом случае косы дрейфуют по течениям. Отсюда следует с очевидностью, что предусмотрено перемещение сейсмических кос за счет комбинации дрейфа по течению и тяговых усилий телеуправляемых аппаратов.
Средства, удерживающие сейсмические косы на постоянной глубине, включают контейнеры с балластом, балласт, буи и/или подруливающие устройства.
Изобретение раскрыто, но не ограничено, в приведенном ниже подробном описании вариантов его осуществления, а также ссылках на прилагаемые к чертежи:
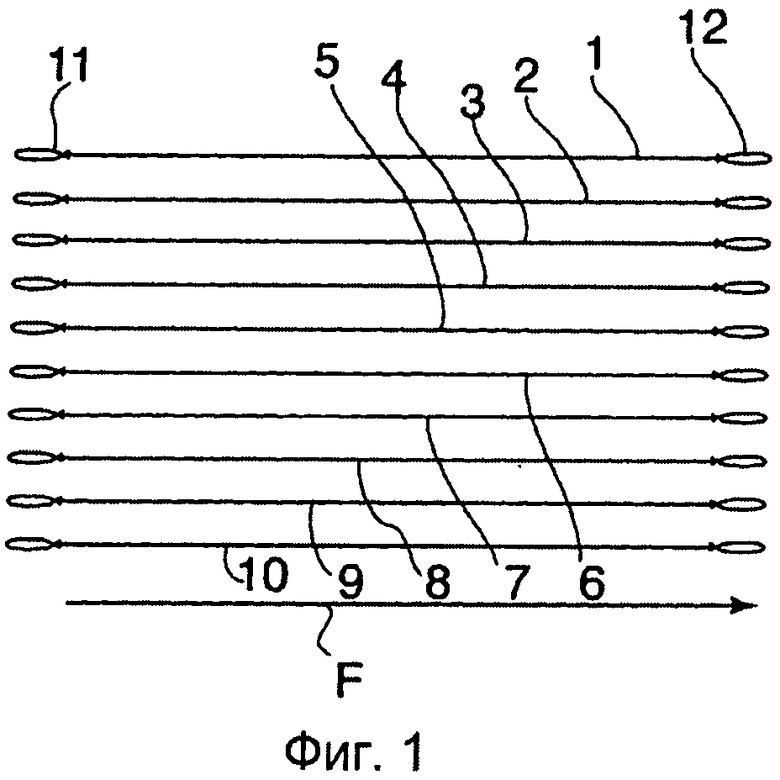
Фиг.1 - вид сверху на ряд позиционированных согласно изобретению параллельных сейсмических кос.
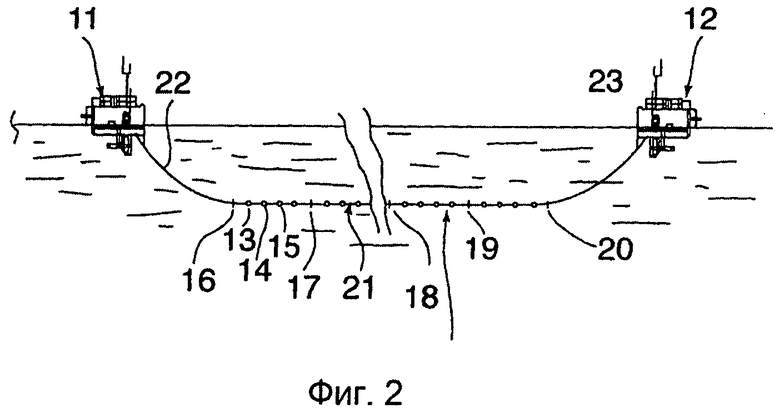
Фиг.2 - представлен вид сейсмической косы в вертикальной продольной плоскости со средствами ее позиционирования.
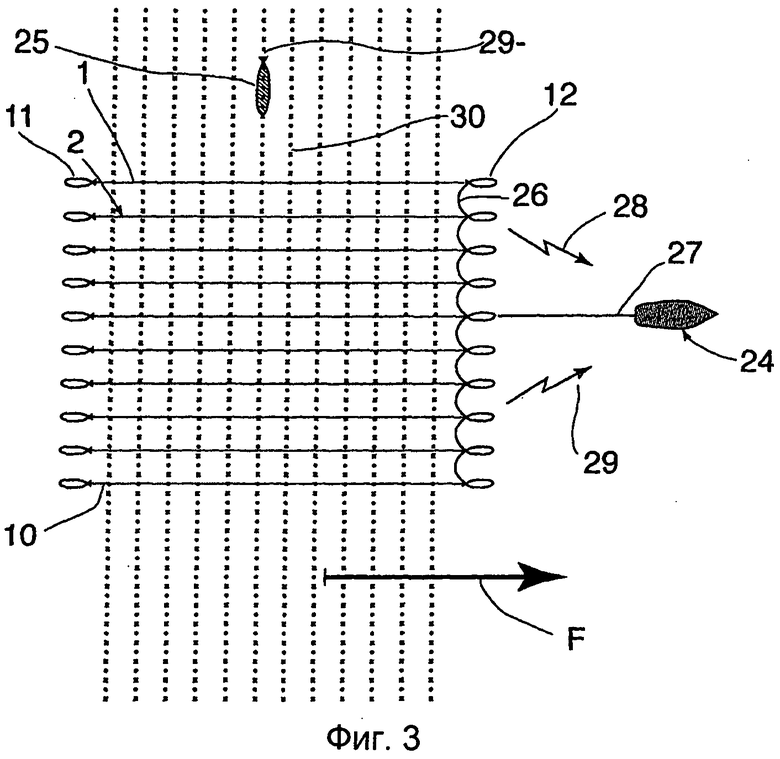
Фиг.3 - на виде сверху представлено предлагаемое устройство в целом, включая параллельные сейсмические косы, судно, производящее запись результатов замеров и судно-источник.
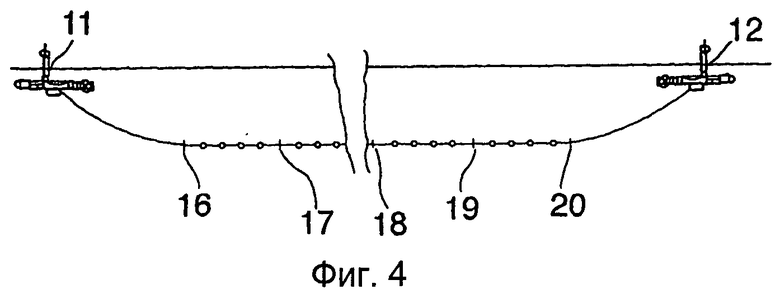
Фиг.4 - вариант фиг.2.
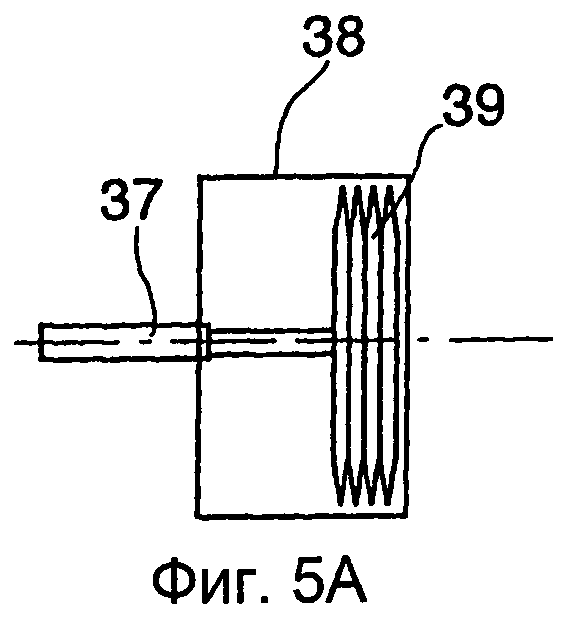
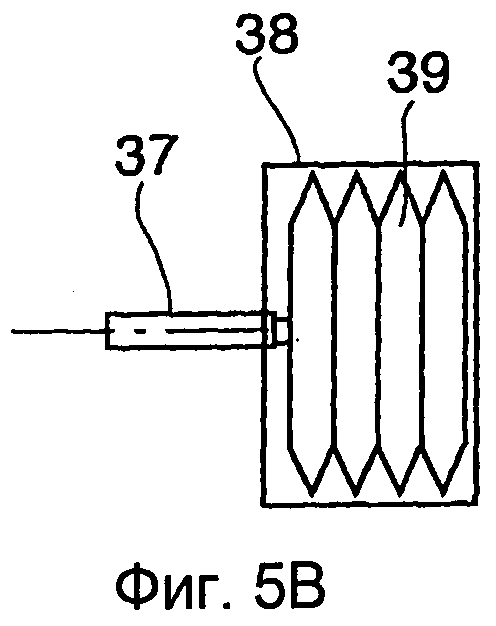
Фиг.5А и 5В - местные радиальные продольные разрезы, на которых представлены два состояния первого средства, служащего для удержания контейнера с балластом на постоянной глубине, соответственно средство, заполненное водой, и средство в порожнем состоянии.
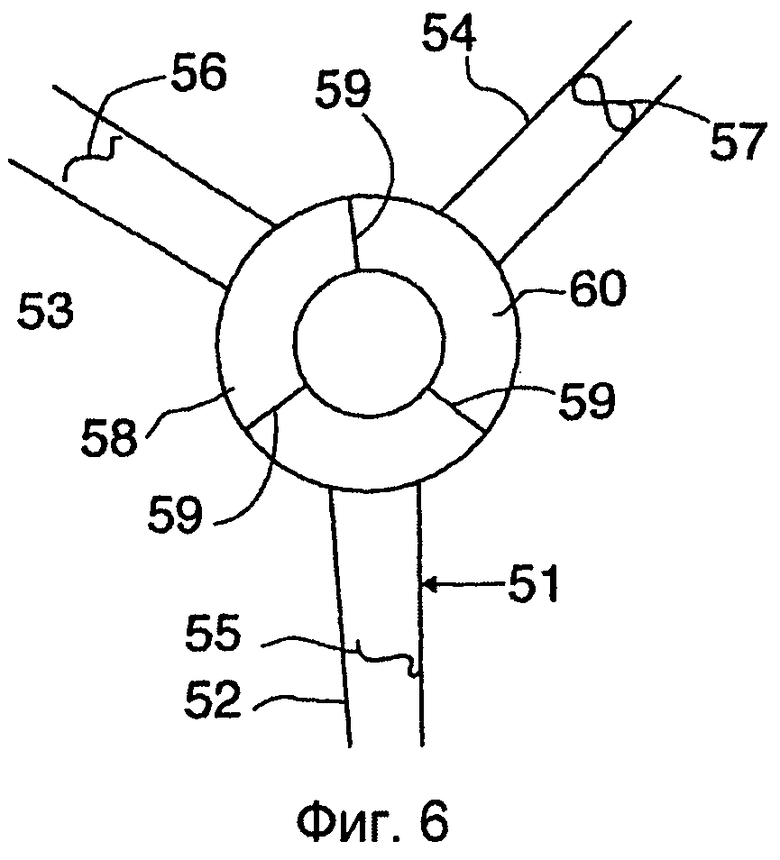
Фиг.6 - вид в поперечном разрезе второго средства, предназначенного для удерживания сейсмической косы на постоянной глубине.
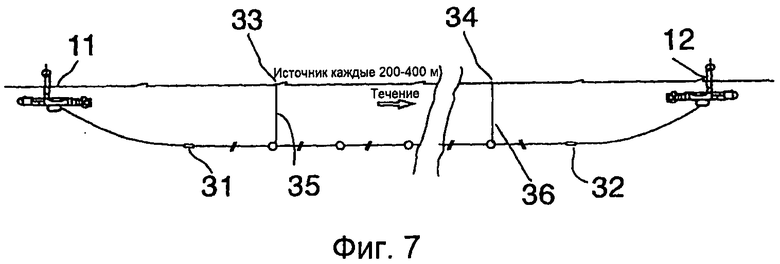
Фиг.7 - еще один вариант фиг.2 и 4.
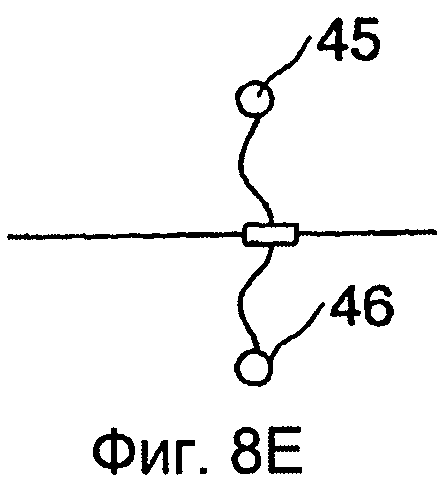
Фиг.8А-8Е - графическое представление вариантов крепления и соединения датчиков с сейсмической косой.
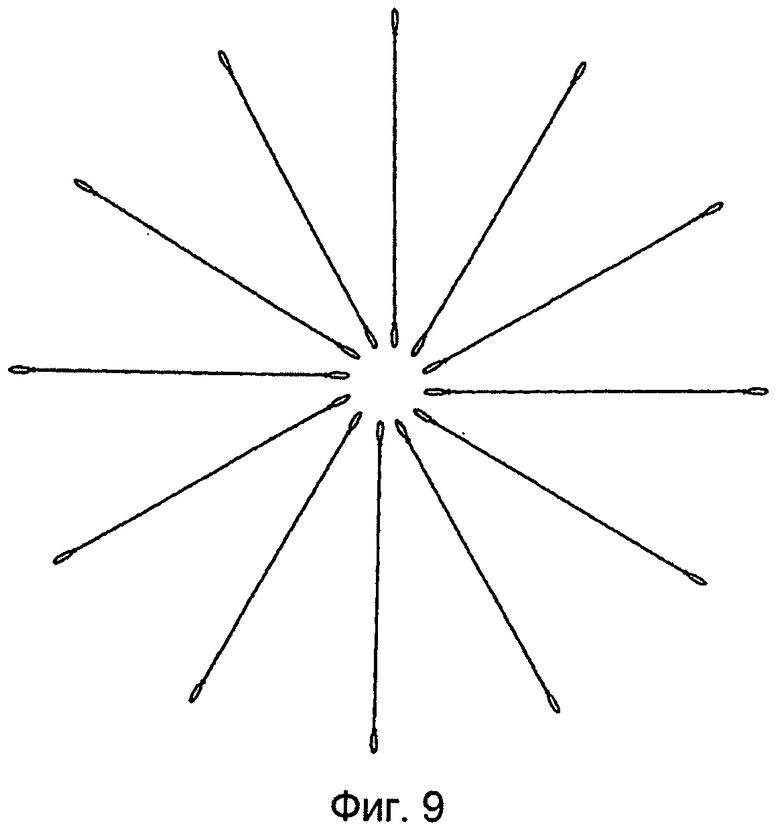
Фиг.9 - вид сверху на вариант расположения сейсмических кос звездой в стационарном режиме относительно морской среды.
Далее следует описание предлагаемого устройства и способа его использования при морской сейсморазведке, причем, само собой разумеется, что изобретение равным образом применимо к разведке в акватории любого типа, в том числе с небольшими модификациями, под шапками полярного льда.
В соответствии с фиг.1 предлагаемое устройство и способ его использования включают ряд погруженных в воду и параллельных друг другу сейсмических кос, называемых также сейсмоприемными линиями или сейсмоприемными косами и обозначенных на чертеже цифрами с 1 по 10. Сейсмические косы представляют собой косы известного типа, за исключением того, что их плавучесть, по существу, сведена к нулю, а механические и гидродинамические характеристики приведены в соответствие с их почти нулевой скоростью в воде, выражаясь в очень слабом натяжении и очень низком гидродинамическом сопротивлении. Каждая сейсмическая коса служит опорой для ряда сейсмических датчиков, например гидрофонов или гидрофонов с акселерометрами.
На обоих концах каждой сейсмической косы закреплено по устройству для позиционирования и натяжения косы, плавучего, погружного или полупогружного типа, представляющему собой, в частности, либо маломерное судно, либо телеуправляемый аппарат. Так, к обоим концам косы 1 прикреплено по телеуправляемому аппарату, соответственно 11 и 12. Для наглядности пары аппаратов, соединенные с концами других кос, на чертеже не обозначены.
В обозначенном на фиг.1 стрелкой F продольном направлении косы 1-10 расположены параллельно друг другу.
Косы независимы друг от друга, механическая связь между ними отсутствует.
Телеуправляемые аппараты оборудованы независимыми движителями. Схема действий: поддерживают неподвижную или псевдонеподвижную конфигурацию сейсмической косы, затем производят замеры, используя одно судно-источник, после чего конфигурацию косы и источник перемещают к другому пункту измерений.
Например, количество сейсмических кос, предусмотренное для позиционирования таким образом, составляет от 5 до 30, предпочтительно от 20 до 25, а длина кос составляет от 6 км до 12 км, предпочтительно приблизительно 8 км.
На фиг.2 показан местный вид в вертикальной продольной плоскости, то есть в плоскости, перпендикулярной поверхности акватории, одной из сейсмических кос, а именно косы 1, и соединенных с ней телеуправляемых аппаратов 11 и 12.
Сейсмическая коса 1 имеет закрепленные на ней сенсорные модули, из которых для наглядности на чертеже обозначены только первые три модуля 13, 14 и 15. Как вариант, имеется 320 сенсорных модулей, установленных с интервалом 25 м.
Кроме того, сейсмическая коса 1 содержит элементы, образующие контейнер с балластом, обозначенные цифрами с 16 по 20 и предназначенные для удержания косы на постоянной глубине погружения. Таким образом, сейсмическая коса содержит, по существу, прямолинейную, основную среднюю часть 21, служащую опорой для сенсорных модулей и контейнеров для балласта, и две криволинейные концевые части 22 и 23, соединяющие среднюю часть с каждым из телеуправляемых аппаратов 11, 12.
Телеуправляемые аппараты относятся к известному типу, они представляют собой, например, плавучие или полупогружные аппараты с движителем, предпочтительно дизельным, или электрическим двигателем, получающим питание по кабелю, соединенному с источником питания на главном судне.
Телеуправляемые аппараты имеют движители или подруливающие устройства, удерживающие сейсмическую косу в состоянии натяжения, в частности, для того, чтобы обеспечить несущей гидрофоны средней части 21:
- по существу, горизонтальное положение, как показано на фиг.2,
- и постоянную глубину расположения, благодаря использованию описанных далее средств, от 20 м до 200 м, предпочтительно от 50 м до 100 м.
Термин "глубина сейсмической косы" следует понимать как высоту воды над прямолинейной средней частью 21.
Устройство, состоящее из сейсмической косы и ее датчиков, сконструировано с обеспечением, по существу, нулевой плавучести, то есть средний удельный вес косы, по существу, приравнен к среднему удельному весу окружающей воды, либо с обеспечением небольшой положительной плавучести.
В соответствии с изобретением для сейсмических кос 1-10 предусмотрено:
- удерживание каждой косы в состоянии натяжения;
- поддержание заданной конфигурации, например, в соответствии с фиг.1, сейсмические косы параллельны друг другу;
- обеспечение неподвижности относительно морского дна или относительно морской среды, либо псевдонеподвижности, с учетом морских течений;
- и удерживание на заданной постоянной глубине.
Телеуправляемые аппараты имеют средства абсолютного позиционирования, например, типа GPS. Используя известные триангуляционные средства, например акустические, определяют относительное положение каждого датчика и, следовательно, при помощи GPS телеуправляемых аппаратов абсолютное положение каждого датчика.
На фиг.3 показан вид сверху на предлагаемое устройство, работа которого описана ниже. Как описано выше, комплект сейсмических кос 1 -10 в пункте измерений развертывают в конфигурацию из параллельных кос, например квадрат. Следовательно, сейсмические косы расположены параллельно друг другу, на постоянном и одинаковом расстоянии нескольких сотен метров, и неподвижны, либо относительно морского дна, либо относительно морской среды. В последнем случае на них действуют только течения.
Устройство также содержит главное судно 24 со средствами записи сигналов от сейсмических датчиков, то есть гидрофонов и геофонов, и от датчиков положения, расположенных на сейсмических косах и в телеуправляемых аппаратах. Главное судно 24 позиционируют относительно комплекта сейсмических кос в любой точке, но предпочтительно на продольной оси, проходящей через середину геометрической фигуры, образованной комплектом кос, в данном случае квадрата. Благодаря предпочтительному положению вблизи телеуправляемого аппарата, который также называют головной секцией, обеспечена оптимизация передачи сейсмических данных по радио. Во время измерений главное судно 24 располагают относительно комплекта сейсмических кос почти неподвижно, затем следует перемещение комплекта от одного пункта измерений к другому.
Кроме того, предусмотрено судно 25, несущее сейсмический источник известного типа, например пневматический источник колебаний. Направление прохода судна-источника 25 в соответствии с предпочтительным вариантом осуществления изобретения, как показано на фиг.3, смещено относительно комплекта сейсмических кос и перпендикулярно косам. Комплект сейсмических кос удерживают в неподвижном положении в течение времени, необходимого для осуществления судном-источником обычным образом серии возбуждения волн или ряда серий возбуждения волн, ниже обозначенных звездочками.
На главном судне 24 имеются средства для приема результатов замеров и информации, поступающей от датчиков на обработку.
Информацию, поступающую от датчиков, как от сейсмических датчиков, так и от датчиков положения, в первую очередь, временно хранят в телеуправляемых аппаратах, а затем передают на главное судно 24 тремя способами:
- либо при помощи электрических линий, с одной стороны, по сейсмической косе, с другой стороны, например, по линии 26 между косами 1 и 2, и, с другой стороны, между косами 1-10 и главным судном 24, по линии 27;
- либо по линии беспроводной связи, например, по радиоканалу или по другому каналу, обозначенными на чертеже стрелками 28 и 29; при таком решении проводные линии 26 между сейсмическими косами и линией 27, то есть между сейсмическими косами и измерительным судном 24, отсутствуют;
- либо посредством физического восстановления дисков или памяти данных, установленных в телеуправляемых аппаратах; в этом случае радиолинию используют для передачи данных по контролю качества, небольшого объема данных о положении и команд в обоих направлениях.
Согласно предпочтительному варианту осуществления изобретения главное судно 24 соединяют с телеуправляемыми аппаратами по каналам двусторонней радиосвязи для передачи данных о положении, сейсмических и управляющих данных. Таким образом, каждый телеуправляемый аппарат осуществляет обмен данными с другими аппаратами, судном-источником 25 и главным судном 24, записывающим эти данные. Например, судно-источник и главное судно принимают в реальном времени данные о позиционировании, относящиеся к сейсмическим косам, их датчикам и телеуправляемым аппаратам. Затем, с учетом данных в реальном времени, на основе данных о положении сейсмических кос судно-источник обеспечивает определение частоты возбуждения волн источником, определение направления линий, вдоль которых осуществляют возбуждение, и границ возбуждения относительно положения кос в реальном времени. Кроме того, телеуправляемые аппараты перемещают в реальном времени в соответствии с текущими условиями и/или условиями возбуждения волн.
Перед операциями возбуждения волн источником и измерением отраженных волн сейсмические косы устанавливают в соответствующее положение, используя одно судно или ряд транспортных судов. Сейсмические косы с датчиками наматывают на барабаны. Когда транспортное судно доходит до первого места производства замеров, опускают в воду телеуправляемый аппарат, например расположенный выше по течению аппарат, к этому аппарату, используя предварительно установленное на аппарате крепление, присоединяют конец сейсмической косы и разматывают косу. Сейсмическую косу протягивают либо при помощи расположенного выше по течению телеуправляемого аппарата, при этом транспортное судно неподвижно, либо ее разматывают благодаря движению вперед транспортного судна, при этом расположенный выше по течению аппарат неподвижен. После полного разматывания косы ее второй конец прикрепляют ко второму телеуправляемому аппарату, в данном случае к расположенному ниже по течению аппарату. После этого косу вместе с двумя телеуправляемыми аппаратами отсоединяют от судна. Во время этого маневра, включающего установку в воду, расположенный выше по течению телеуправляемый аппарат осуществляет прием информации от центральной системы, расположенной, например, на главном судне. Эта информация обеспечивает точное позиционирование телеуправляемого аппарата при помощи GPS. Требуемую глубину сейсмической косы получают, натягивая косу при помощи телеуправляемых аппаратов и воздействуя на соответствующие средства, например контейнеры с балластом, буи и/или балласт. Ту же процедуру применяют к другим позиционируемым относительно друг друга косам, обеспечивая требуемую конфигурацию, например квадрат, или другую геометрическую форму.
Предпочтительный вариант осуществления изобретения включает следующие этапы:
- изображенная на фиг.3 конфигурация образует пункт измерений, элементы которого, включая сейсмические косы, судно-источник 25 и измерительное судно 24, установлены на заданном расстоянии друг от друга и с заданной конфигурацией;
- комплект сейсмических кос и главное судно 24 удерживают в неподвижном положении, судно-источник 25 начинает серию возбуждений волн, двигаясь по линии 29, перпендикулярно продольному направлению сейсмических кос, обозначенному стрелкой F, периодически приводя в действие сейсмический источник. Расстояние, пройденное, таким образом, судном-источником 25, движущимся в сторону от комплекта неподвижных сейсмических кос, составляет приблизительно 16 км, при частоте возбуждения волн приблизительно 6 раз в минуту и продолжительности приблизительно 2 часа;
- волны, улавливаемые сейсмическими косами, принимают датчики, затем соответствующие сигналы передают для обработки на главное судно 24;
- после этого комплект перемещают к другому пункту измерений следующим образом:
- комплект сейсмических кос 1-10 перемещают параллельно самому себе посредством телеуправляемых аппаратов и их движителей, например, на расстояние от 25 м до 500 м, что соответствует шагу перемещения между двумя пунктами измерений;
- в течение этого времени главное судно 24 движется в продольном направлении, как указывает стрелка F, на ту же дистанцию или на расстояние, равное тому же шагу;
- кроме того, в течение этого времени судно-источник 25 возвращают к комплекту сейсмических кос, и помещают на новой смещенной поперечной линии 30, удаленной от предыдущей линии 29 на величину вышеупомянутого шага.
Следует заметить, что возможно перемещение сейсмической косы или сейсмических кос при каждом возбуждении волн источником, но чаще его осуществляют по завершении непрерывного ряда возбуждений:
- либо серии возбуждений, включающих, например, 600 возбуждений в соответствии со способом, который носит название "последовательная съемка", либо даже после нескольких серий возбуждений, например, в пределах определенной площади, в соответствии со способом площадной сейсморазведки участка поверхности, используемым в прибрежной среде. В этом случае комплект сейсмических кос удерживают в неподвижном или псевдонеподвижном положении в течение всего времени, необходимого для возбуждения судном-источником волн в пределах определенной площади или решетки возбуждений, например, как показано на фиг.3. линиями звездочек. Затем всю квадратную или прямоугольную конфигурацию сейсмических кос перемещают в продольном направлении на длину устройства или в поперечном направлении на его ширину, и аналогичным образом повторяют ряд возбуждений.
При позиционировании косы в точке измерения осуществляют ее натяжение при помощи прикрепленных к обоим ее концам телеуправляемых аппаратов, при этом телеуправляемые аппараты тянут косу в противоположных направлениях. На сейсмическую косу действуют тяговые усилия со стороны двух телеуправляемых аппаратов одной и той же сейсмической косы, но они не обязательно равны по абсолютной величине, поскольку это необходимо для борьбы с течением. Если для данной сейсмической косы учесть составляющие сил, действующих со стороны телеуправляемых аппаратов вдоль продольной оси, образованной пересечением вертикальной плоскости, проходящей через соответствующую косу, и горизонтальной плоскости, образованной акваторией, то силы, действующие в направлении продольного перемещения косы, то есть в направлении «расположенный ниже по течению аппарат - расположенный выше по течению аппарат», считают положительными, а силу Tav или минимальное натяжение сейсмической косы, действующую со стороны аппарата, расположенного ниже по течению, то есть за косой, если смотреть в направлении ее перемещения, отрицательной. Со стороны расположенного выше по течению аппарата действует сила Tam=Tav+F, где F - гидродинамическое сопротивление косы в потоке. Если течение отсутствует, или косам позволяют дрейфовать, то силы Tav и Tam равны и действуют в противоположных направлениях, так как F=0.
Другой вариант осуществления предлагаемого способа состоит в перемещении судна-источника 25 вдоль линии, которая параллельна сейсмическим косам (обозначена стрелкой F). Этот вариант менее предпочтителен, чем вариант прохода судна-источника перпендикулярно косам, обеспечивающий изотропные измерения и сейсмический пиксел, называемый также «бин», меньшего размера, например, 12,5 м×12,5 м, что ведет к повышению точности измерений.
На фиг.4 показан вариант осуществления изобретения согласно фиг.2 в виде сейсмической косы и двух соединенных с ней телеуправляемых аппаратов, выполненных в виде полупогружных аппаратов.
Удерживание сейсмической косы на постоянной глубине обеспечено при помощи описанных ниже средств. В соответствии с первым примером использованы контейнеры 16-20 с балластом, один из них изображен на фиг.5А и 5В, представляющих виды контейнеров в разрезе. Контейнеры содержат исполнительное устройство 37 и коробку 38, внутри которой установлен сильфон 39. В зависимости от того, в каком состоянии находится сильфон, в сжатом состоянии, или в состоянии покоя, происходит заполнение коробки водой или вытеснение воды из коробки.
В соответствии со вторым примером, показанным на фиг.6, средства для удержания косы 50 на заданной постоянной глубине включают подруливающие устройства 51 известного типа. Каждое подруливающее устройство содержит три трубы 52, 53 и 54, расположенные вокруг косы 50 радиально с шагом 120°. Внутри каждой трубы имеется винт, соответственно 55, 56 и 57, соединенный с двигателем. Предусмотрена компенсация эффекта вращения косы вокруг собственной оси посредством инклинометров, обеспечивающих опорное значение тяги на подруливающих устройствах при вертикальном положении. Кроме того, подруливающие устройства используют для поддержания интервала между сейсмическими косами, компенсируя или поддерживая в этом отношении телеуправляемые аппараты. Сейсмическая коса 50 окружена каркасом 58 цилиндрической формы, соединенным с косой 50 при помощи распорок 59. Благодаря пространству 60 между косой 50 и каркасом 58 вокруг косы 50 обеспечена циркуляция воды.
На фиг.7 показан еще один вариант осуществления изобретения с телеуправляемыми аппаратами, идентичными аппаратам с фиг.4. Эта сейсмическая коса соединена со следующими элементами:
- балласты, на чертеже показаны только два балласта 31 и 32;
- буи, расположенные через каждые 200-400 метров в продольном направлении сейсмической косы; на чертеже изображено только два буя 33 и 34; каждый буй соединен с сейсмической косой проводной линией, соответственно 35 и 36.
Как следует из фиг.7, это вариант предлагаемого способа, в котором выполняют удерживание комплекта сейсмических кос в неподвижном положении относительно водной среды, то есть в дрейфе в соответствии с местным течением.
Этот вариант также идеален для случая, когда сейсмическую косу удерживают в псевдонеподвижном положении относительно дна. Например, при скорости течения 1 узел происходит самостоятельное выравнивание сейсмических кос в направлении течения.
Один из «расположенных выше по течению телеуправляемых аппаратов», то есть аппаратов, которые ориентированы в направлении течения, формирует исходную точку и обеспечивает так называемое псевдодинамическое позиционирование комплекта сейсмических кос относительно заданного абсолютного положения. «Расположенные выше по течению телеуправляемые аппараты» других кос позиционируют на основе двух уставок:
- расположенной выше по течению линии телеуправляемых аппаратов, перпендикулярной косам, в случае квадратной или прямоугольной конфигурации;
- заданного постоянного разделительного интервала между расположенными выше по течению телеуправляемыми аппаратами.
Рассматриваемое устройство оборудовано средствами, обеспечивающими сохранение конфигурации сейсмических кос в соответствии с переменными параметрами течения, например его направлением и интенсивностью. При смене направления течения на противоположное предусмотрен обмен функциями между расположенными выше и ниже по течению телеуправляемыми аппаратами ввиду их функциональной идентичности.
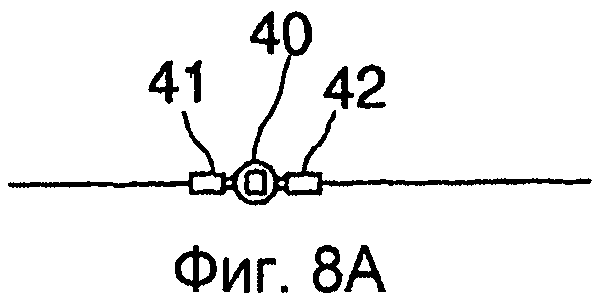
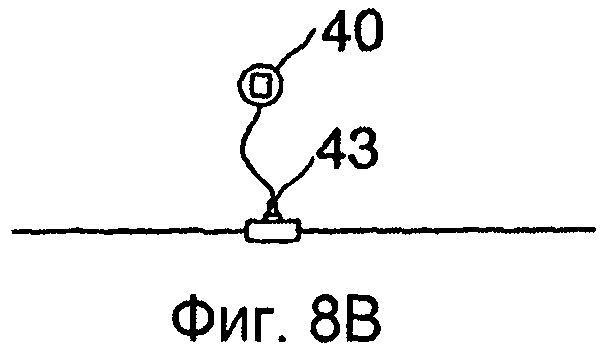
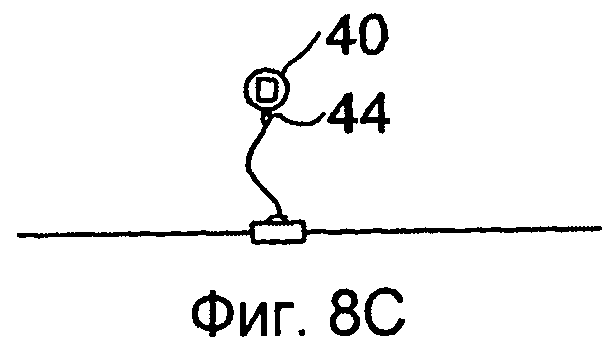
На фиг.8А-8Е схематично изображены варианты присоединения сейсмической косы 1 к каждому сенсорному модулю, предусматривающие возможность механического отсоединения сенсорных модулей.
На фиг.8А показана коробка 40 с датчиками, соединенная с сейсмической косой при помощи правого и левого соединителя 41 и 42; как вариант коробка 40 присоединена к косе при помощи неразъемного соединения.
На фиг.8В и 8С показан обычный вариант, в котором коробка с датчиками не закреплена на сейсмической косе, в результате чего снижены помехи и исключены артефакты измерения, происходящие вследствие присутствия и вибрации косы. Коробку датчиков соединяют с сейсмической косой при помощи ответвления или вывода длиной несколько метров через соединитель 43, расположенный на косе, как показано на фиг.8 В, или соединитель 44, установленный на коробке датчиков, как показано на фиг.8С.
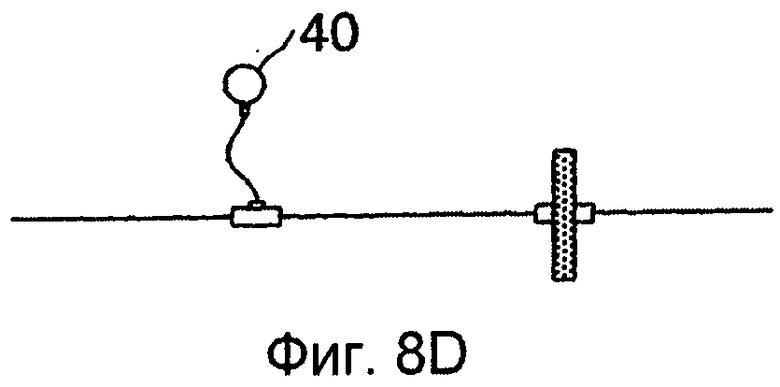
На фиг.8D изображен вариант, соответствующий фиг.8С, но здесь также показана система крепления буев в соответствии с вариантом, представленным на фиг.7.
На фиг.8Е показан вариант, который предпочтительней варианта с фиг.8D: две коробки 45 и 46 датчиков, содержащие только гидрофоны, прикреплены к сейсмической косе при помощи гибких связей, длиной, например, приблизительно 3 м, с каждой стороны косы, в вертикальном направлении.
Наконец, на фиг.9 представлен другой пример конфигурации сейсмических кос, в этом случае расположенных звездой, осуществимой только в стационарном режиме относительно морской среды. Возможны другие конфигурации: ромб, трапеция, прямоугольник и прочие геометрические фигуры.
Управление устройством предпочтительно осуществляют при помощи центральной логической системы, например вычислительной машины с запоминаемой программой, расположенной на главном судне и управляющей, например, сбором сейсмических данных, приведением в действие телеуправляемых аппаратов для их позиционирования и приведением в действие источника. Интеллект центральной вычислительной машины в виде программного обеспечения, доступного в режиме реального времени, осуществляет управление и координацию команд, обеспечивая наилучшую стационарность и требуемую геометрию сейсмической косы на протяжении серии измерений. В программном обеспечении учтены морские течения. С этой целью текущую скорость и величины, характеризующие направление течения, не только измеряют на месте или берут из опубликованных источников, но и прогнозируют на несколько дней вперед, с помощью океанографических и/или метеорологических служб и существующих моделей, с записью их в базу данных центральной вычислительной машины.
Предлагаемый способ и устройство обладают следующими преимуществами:
- благодаря использованию гидрофонов и геофонов, посредством комбинирования сигналов, полученных от датчиков двух типов, обеспечены равномерный спектр, устранение "духов", сбор информации, относящейся к очень низким частотам, и определение направления волн, с отсечением шумовых помех, исходящих от других сейсморазведочных судов;
- обеспечено меньшее натяжение сейсмической косы, чем в известных из предшествующего уровня техники устройствах, в которых косы буксируют со скоростью несколько узлов, следовательно, уровень шумов из-за буксировки значительно снижен, в частности, для геофонов и акселерометров;
- в варианте с неподвижной относительно дна водоема сейсмической косой ее перемещают со скоростью, противоположной скорости течения, в среднем приблизительно 1 узел, небольшой в сравнении со скоростью перемещения при обычных способах. Следовательно, влияющий на сейсмические датчики шум течения значительно снижен или, при отсутствии течения, нулевой. Более того, при погружении сейсмической косы на большую глубину, например, более 50 м, устройство обеспечивает значительное снижение уровня шума, приблизительно наполовину или на четверть, по сравнению со способами, известными из предшествующего уровня техники, при которых косу буксируют со скоростью 5 узлов, и на небольшой глубине приблизительно 6 м. Предлагаемый способ обеспечивает почти полную нечувствительность сигнала к шуму волн и состоянию моря;
- так как отношение сигнал/шум существенно увеличено, для предлагаемого устройства необходим только один источник, мощность которого в два или четыре раза меньше мощности обычного источника, что экономично;
- предлагаемое устройство обеспечивает большое количество геометрических конфигураций сейсмической косы, в частности очень широких конфигураций "широкий азимут" или очень длинных конфигураций, как указано выше. Предусмотрены разные конфигурации в зависимости от типа осуществляемой разведки, в частности для разведки сложных и глубоких геологических структур, например соляных куполов, разломов, перекрытия пластов и базальтовых слоев;
- благодаря этой же универсальности конфигурации предусмотрен обход препятствий предлагаемым устройством, не прерывая измерений, например, небольших островов или нефтепромысловых платформ. На практике в случае квадратной конфигурации предусмотрено разделение сейсмических кос на два комплекта, с пропуском одной части слева от препятствия, а другой справа;
- изобретение обеспечивает точные измерения благодаря уменьшенному размеру, приблизительно 12,5 м×12,5 м, и изотропии «бина» или сейсмического пиксела при сейсмическом картографировании, обеспечивающим эффективность сейсмической разведки и, в частности, например, подавление многократных волн, шумоподавление или визуализацию;
- в предлагаемом способе использовано только одно измерительное судно, более низкой, в сравнении с предшествующим уровнем техники, мощности, благодаря тому, что оно не выполняет буксировку комплекта сейсмических кос;
- в предлагаемом способе использовано только одно судно-источник; тем не менее, предусмотрена техника одновременного возбуждения при помощи пневмопушек или морских вибрационных источников и, таким образом, за счет использования ряда судов-источников, существенно увеличена производительность;
- согласно предварительной оценке снижение расходов при использовании предлагаемого устройства составляет приблизительно 35, по сравнению с описанной выше техникой широкоазимутальной сейсморазведки, а производительность, по сравнению с прокладкой донной косы, выше в 2-4 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2392643C2 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2005 |
|
RU2279696C1 |
| СЕЙСМИЧЕСКАЯ РАЗВЕДКА | 2003 |
|
RU2334999C2 |
| СИСТЕМА ШУМОПОДАВЛЕНИЯ СО СДВОЕННЫМ ДАТЧИКОМ ДЛЯ ПОДВОДНОЙ СЕЙСМОПРИЕМНОЙ КОСЫ | 2011 |
|
RU2569414C2 |
| ОПРЕДЕЛЕНИЕ ВЫСОТЫ ПОВЕРХНОСТИ СТОЛБА ЖИДКОСТИ | 2002 |
|
RU2321026C2 |
| СИСТЕМА И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2015 |
|
RU2598622C1 |
| Способ подводной подледной сейсморазведки и устройство для его осуществления | 2017 |
|
RU2696820C1 |
| Способ установки морского полигона донных станций | 2023 |
|
RU2797702C1 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА С РЕЖЕКЦИЕЙ ВОЛНЫ-СПУТНИКА И ДВИЖЕНИЯ | 2011 |
|
RU2546997C2 |
| СПОСОБ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ ДЛЯ ПОДАВЛЕНИЯ МНОГОКРАТНЫХ ПЕРЕОТРАЖЕНИЙ | 1994 |
|
RU2116657C1 |
Изобретение относится к области геофизики и может быть использовано при проведении морских сейсморазведочных работ. Заявлены способ и устройство для водной сейсморазведки. Способ предполагает позиционирование погруженного в воду передвижного сейсмического источника и формирование возмущений, передаваемых через водную среду в виде волн, отражающихся от дна водоема и различных расположенных ниже геологических слоев. Позиционируют, по меньшей мере, одну сейсмическую косу, предпочтительно ряд сейсмических кос, оснащенных рядом датчиков, улавливающих указанные отраженные волны, таким образом, что сейсмическая коса находится в состоянии натяжения при помощи присоединенных к обоим ее концам телеуправляемых аппаратов, а также удерживается на постоянной глубине при производстве замеров с помощью средств, удерживающих сейсмическую косу. Указанный сейсмический источник приводят в действие однократно или многократно, создавая возмущение или ряд возмущений. Принимают указанные отраженные волны, используя упомянутые датчики. Технический результат: повышение точности данных зондирования. 2 н. и 16 з.п. ф-лы, 14 ил.
1. Способ водной сейсморазведки, содержащий этапы:
- позиционируют, по меньшей мере, один погруженный в воду передвижной сейсмический источник, формирующий возмущение, передаваемое через водную среду в виде волн, отражающихся от дна водоема и различных геологических слоев;
- позиционируют, по меньшей мере, одну сейсмическую косу, предпочтительно ряд сейсмических кос, оснащенных рядом датчиков, улавливающих упомянутые выше отраженные волны;
- упомянутый сейсмический источник приводят в действие однократно или многократно, обеспечивая таким образом возмущение или возмущения;
- принимают отраженные волны, используя указанные датчики;
отличающийся тем, что
- по меньшей мере, одну сейсмическую косу устанавливают в пункте измерений в неподвижном или псевдонеподвижном положении, либо относительно водной среды, либо относительно дна водоема;
- по меньшей мере, одну сейсмическую косу при производстве замеров удерживают, с одной стороны, в состоянии натяжения при помощи присоединенных к обоим ее концам телеуправляемых аппаратов, а с другой стороны удерживают, по существу, на постоянной глубине более 5 м, предпочтительно от 20 м до 200 м, более предпочтительно от 50 м до 100 м;
- формируют, по меньшей мере, одно возмущение и принимают отраженные волны;
- прекращают операцию измерения;
- с одной стороны, сейсмическую косу, а с другой стороны, сейсмический источник перемещают к другому пункту измерений и т.д.
2. Способ по п.1, отличающийся тем, что датчики состоят из гидрофонов или из комбинации гидрофонов и геофонов и/или акселерометров.
3. Способ по п.1 или 2, отличающийся тем, что сейсмические косы перемещают между двумя пунктами измерений на расстояние, или с шагом, от 100 м до 600 м, предпочтительно от 200 м до 400 м.
4. Способ по любому из пп.1-2, отличающийся тем, что для перемещения указанных сейсмических кос предусмотрено использование морских течений.
5. Способ по любому из пп.1-2, отличающийся тем, что сейсмические косы перемещают, используя телеуправляемые аппараты, прикрепленные к каждому концу кос.
6. Способ по любому из пп.1-2, отличающийся тем, что обеспечено натяжение сейсмических кос за счет приведения в действие прикрепленных к каждому их концу телеуправляемых аппаратов, тянущих косы в противоположных направлениях.
7. Способ по любому из пп.1-2, отличающийся тем, что сейсмические косы имеют длину от 4 км до 12 км, предпочтительно от 6 км до 10 км, предпочтительно 8 км.
8. Способ по любому из п.п.1-2, отличающийся тем, что разделительный интервал между соседними сейсмическими косами составляет от 100 м до 600 м, предпочтительно от 250 м до 400 м.
9. Способ по любому из пп.1-2, отличающийся тем, что датчики установлены вдоль сейсмической косы приблизительно через каждые 25 м, что составляет приблизительно 320 датчиков на одну косу.
10. Способ по любому из пп.1-2, отличающийся тем, что сейсмические косы позиционируют так, что на виде сверху их периметр образует прямоугольник, круг, овал, ромб или квадрат.
11. Способ по любому из пп.1-2, отличающийся тем, что используют одно судно-источник, проходящее при производстве замеров по существу либо перпендикулярно, либо параллельно продольному направлению параллельных сейсмических кос.
12. Устройство для водной сейсморазведки, которое содержит:
- по меньшей мере, один погруженный в воду передвижной сейсмический источник, формирующий возмущение или возмущения, передаваемые через водную среду в виде волн, отражающихся от дна и различных геологических слоев;
- по меньшей мере, одну сейсмическую косу, предпочтительно ряд сейсмических кос, оснащенных рядом датчиков, улавливающих отраженные волны;
- средства для обнаружения и измерения указанных волн
- и средство для перемещения сейсмического источника, отличающееся тем, что оно, кроме того, содержит:
- средства, обеспечивающие натяжение, по меньшей мере, одной сейсмической косы, присоединенные к обоим ее концам и обеспечивающие, с одной стороны, позиционирование, по меньшей мере, одной сейсмической косы в пункте измерений в неподвижном или псевдонеподвижном положении, либо относительно водной среды, либо относительно дна водоема, а с другой стороны, перемещение, по меньшей мере, одной сейсмической косы от одного пункта измерений к следующему пункту измерений;
- средства, удерживающие сейсмическую косу при производстве замеров, по существу, на постоянной глубине более 5 м, предпочтительно от 20 м до 200 м, более предпочтительно от 50 м до 100 м;
- и средства приведения указанного источника в действие.
13. Устройство по п.12, отличающееся тем, что датчики состоят из комбинации гидрофонов и геофонов.
14. Устройство по п.12 или 13, отличающееся тем, что средства для перемещения и средства для натяжения состоят из телеуправляемых аппаратов, причем к обоим концам каждой сейсмической косы прикреплено по телеуправляемому аппарату.
15. Устройство по любому из пп.12-13, отличающееся тем, что, по меньшей мере, один из датчиков встроен в сейсмическую косу.
16. Устройство по любому из пп.12-13, отличающееся тем, что, по меньшей мере, один из датчиков присоединен к сейсмической косе при помощи гибкого соединения.
17. Устройство по любому из пп.12-13, отличающееся тем, что средства для удерживания сейсмической косы, по существу, на постоянной глубине содержат, по меньшей мере, один из следующих элементов: контейнер с балластом, балласт, подруливающее устройство и буй.
18. Устройство по любому из п.п.12-13, отличающееся тем, что сейсмические косы имеют, по существу, нулевую плавучесть.

