ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к измерению давления. Более конкретно, но не в качестве ограничения, настоящее изобретение относится к измерению давления на наружной поверхности эластичного контейнера.
ОПИСАНИЕ ИЗВЕСТНОГО УРОВНЯ ТЕХНИКИ
Для того чтобы обеспечить ирригацию части организма во время операции используются хирургические системы. К примеру, во время операции удаления катаракты для того, чтобы обеспечить ирригацию глазного яблока используется офтальмологическая хирургическая система.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В различных вариантах реализации изобретения устройство для подачи находящейся под давлением ирригационной жидкости содержит нажимную пластину и модуль датчика давления. Нажимная пластина выполнена с возможностью перемещения по отношению к модулю датчика давления для того, чтобы оказать давление на эластичный контейнер (к примеру, пакет с ирригационной жидкостью), который находится между нажимной пластиной и модулем датчика давления. Модуль датчика давления содержит датчик усилия для измерения усилия, действующего на модуль датчика давления со стороны эластичного контейнера в связи с тем, что давление приложено к эластичному контейнеру со стороны нажимной пластины, а в некоторых вариантах реализации изобретения модуль датчика давления содержит контактную пластину пакета, и датчик усилия измеряет усилие, действующее на контактную пластину пакета со стороны эластичного контейнера, расположенного между контактной пластиной пакета и нажимной пластиной.
В некоторых вариантах реализации изобретения модуль датчика давления содержит шарнирное соединение на конце контактной пластины пакета, и датчик усилия расположен для измерения усилия, действующего на датчик усилия со стороны контактной пластины пакета в связи с тем, что контактная пластина пакета поворачивается по отношению к шарнирному соединению в тех случаях, когда указанное усилие действует на контактную пластину пакета со стороны эластичного контейнера, расположенного между контактной пластиной пакета и нажимной пластиной.
В некоторых вариантах реализации изобретения модуль датчика давления содержит более чем один датчик усилия, расположенный на противостоящей стороне контактной пластины пакета в связи с тем, что сторона контактной пластины пакета соприкасается с эластичным контейнером. Выходные данные от датчиков усилия могут быть, к примеру, включены, усреднены или сравнены для того, чтобы определить относительное усилие на модуле датчика давления.
В некоторых вариантах реализации изобретения датчик усилия может содержать емкостный датчик, соприкасающийся с эластичным контейнером. В некоторых вариантах реализации изобретения ряд емкостных датчиков (который может включать в себя более чем один емкостный датчик) помещен в контакте с эластичным контейнером (в результате чего некоторые участки эластичного контейнера находятся в контакте с различными датчиками ряда емкостных датчиков).
Также предполагаются другие датчики усилия. К примеру, датчик усилия может содержать измерительный наконечник с поверхностью, выполненной с возможностью соприкосновения с эластичным контейнером. В некоторых вариантах реализации изобретения модуль датчика давления содержит мембрану и внутренний тензодатчик с жидкостью, отделяющей мембрану от внутреннего тензодатчика таким образом, что усилие, действующее на мембрану, передается внутреннему тензодатчику через жидкость. В некоторых вариантах реализации изобретения пакет, наполненный жидкостью, размещается между мембраной и эластичным контейнером для того, чтобы распределить усилие, направленное от эластичного контейнера к мембране.
В различных вариантах реализации изобретения способ измерения давления, связанного с эластичным контейнером, включает размещение эластичного контейнера между нажимной пластиной и модулем датчика давления, перемещение по меньшей мере одной нажимной пластины и модуля датчика давления для того, чтобы оказывать давление на эластичный контейнер, и измерение давления на эластичном контейнере за счет использования датчика усилия на модуле датчика давления.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Для более полного понимания настоящего изобретения делается ссылка на следующее далее описание в сочетании с прилагаемыми чертежами, на которых:
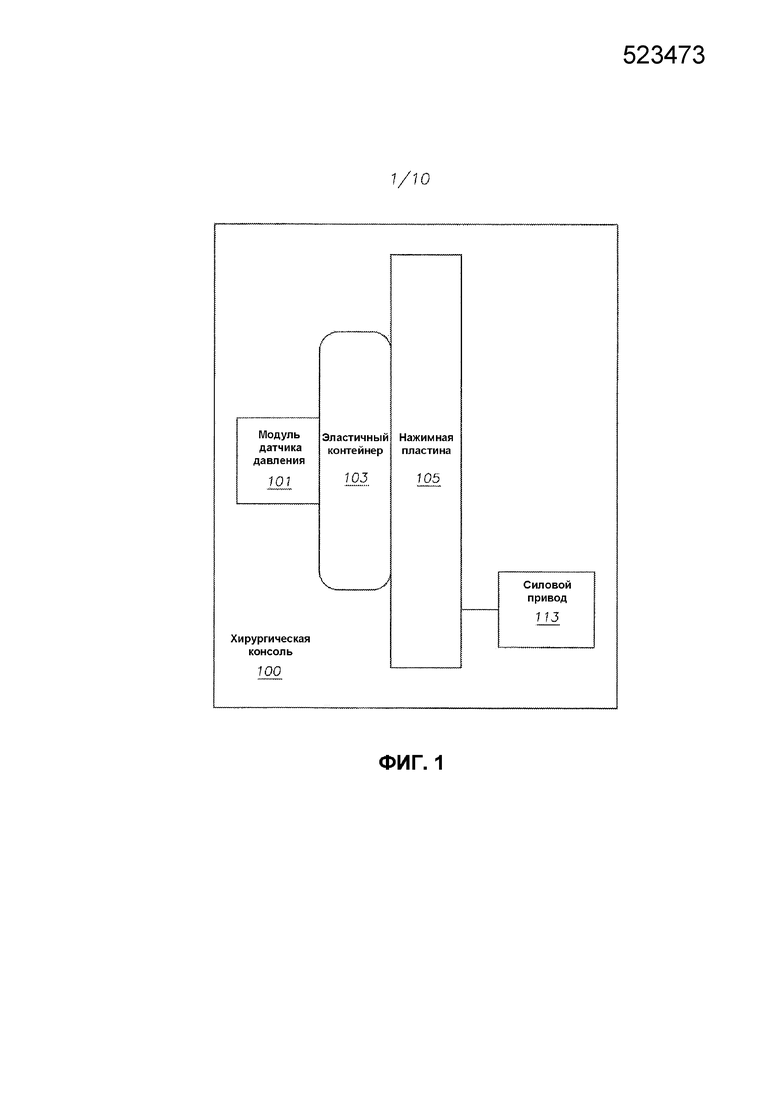
Фиг. 1 иллюстрирует эластичный контейнер между модулем датчика давления и нажимной пластиной согласно варианту реализации изобретения;
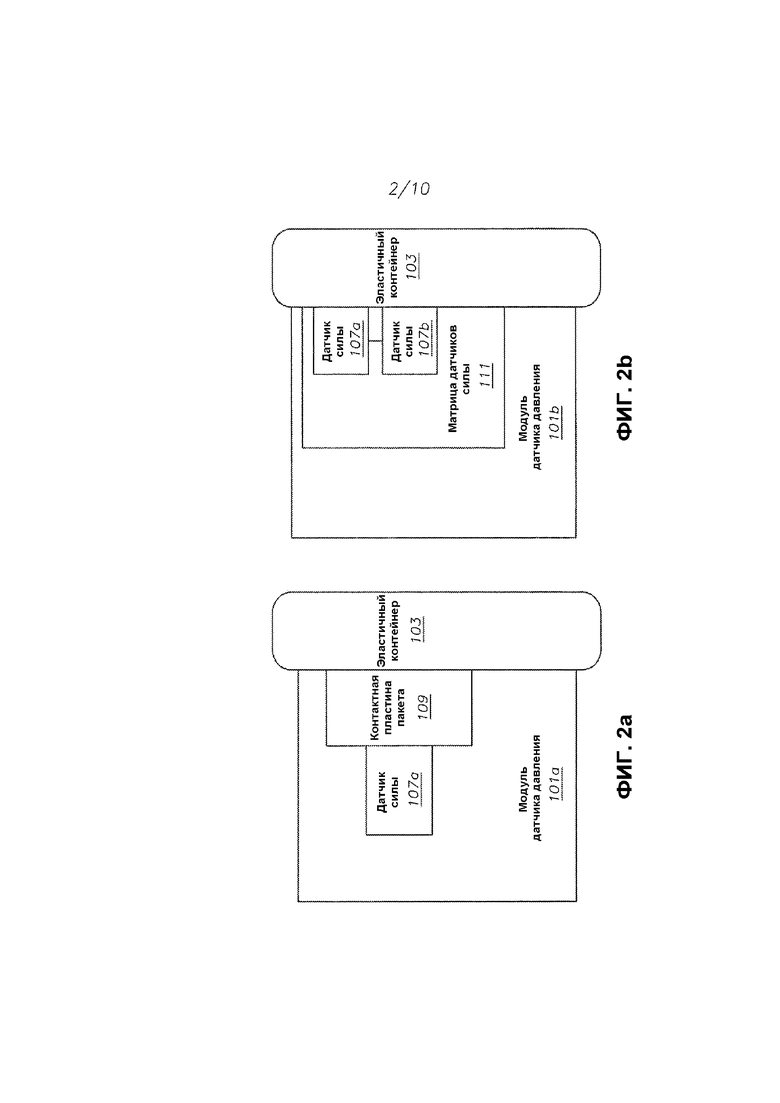
Фиг. 2a-b иллюстрируют модули датчиков давления в соответствии с различными вариантами реализации изобретения;
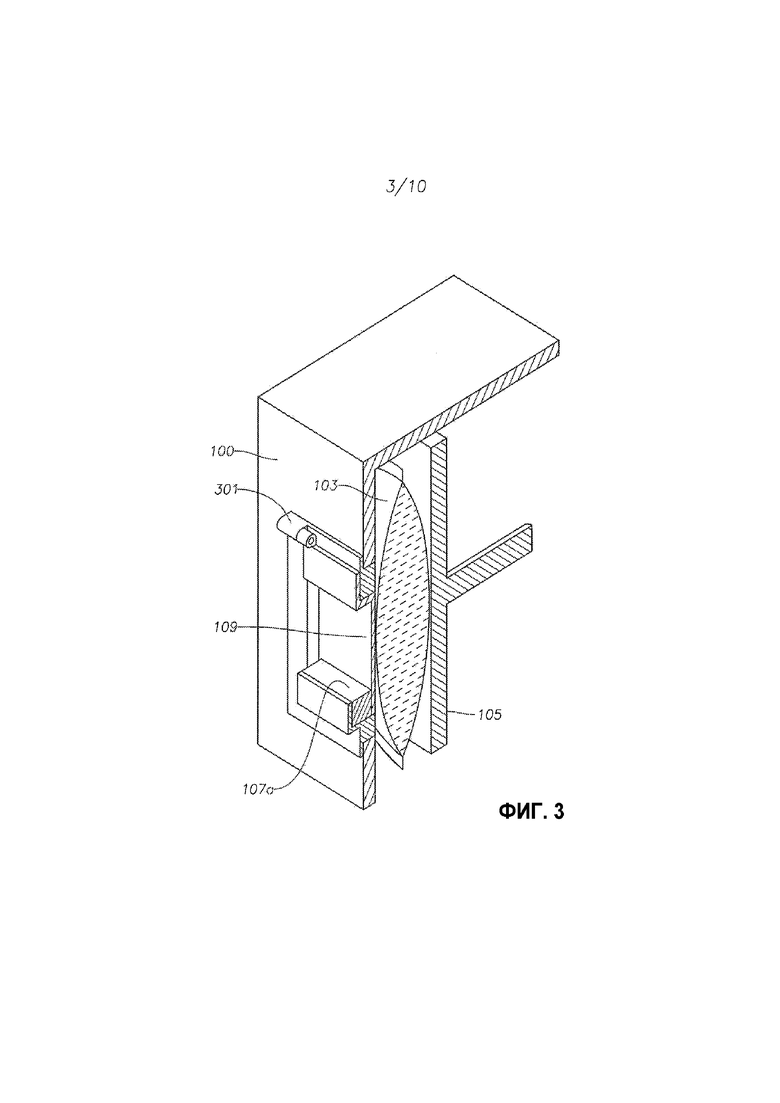
Фиг. 3 иллюстрирует систему измерения давления с шарнирно закрепленной контактной пластиной пакета согласно варианту реализации изобретения;
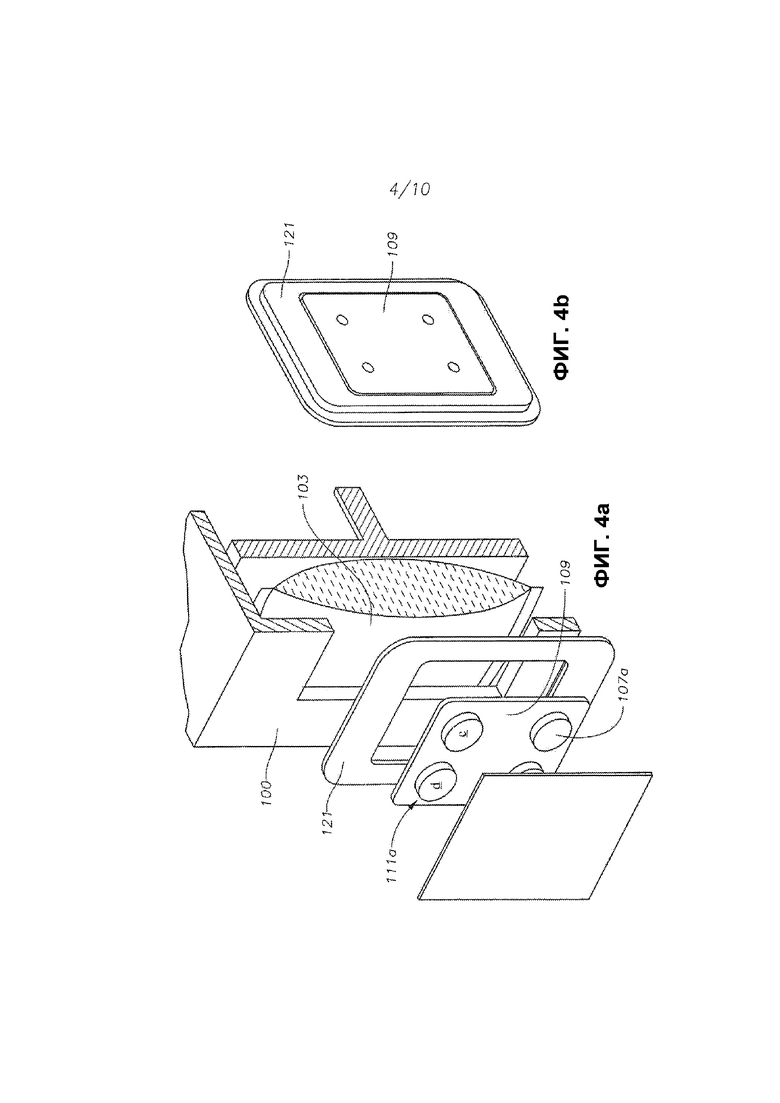
Фиг. 4a-b иллюстрируют систему измерения давления с контактной пластиной пакета и множеством датчиков усилия согласно варианту реализации изобретения;
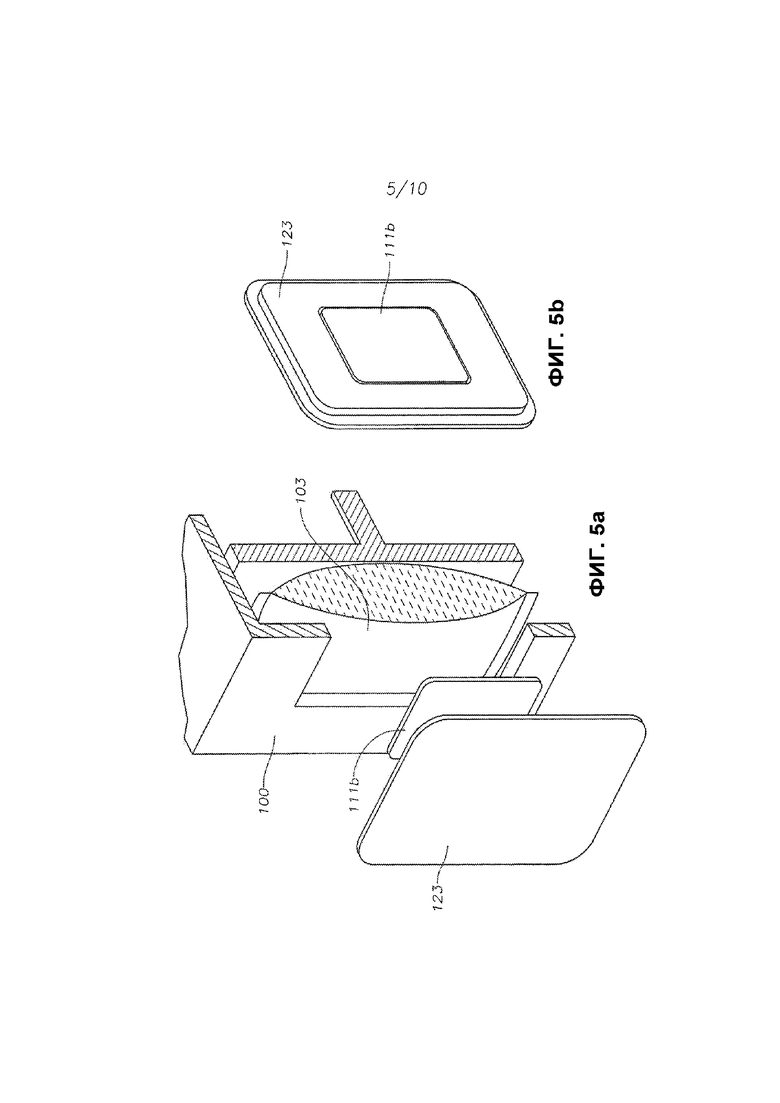
Фиг. 5a-b иллюстрируют систему измерения давления с рядом емкостных датчиков согласно варианту реализации изобретения;
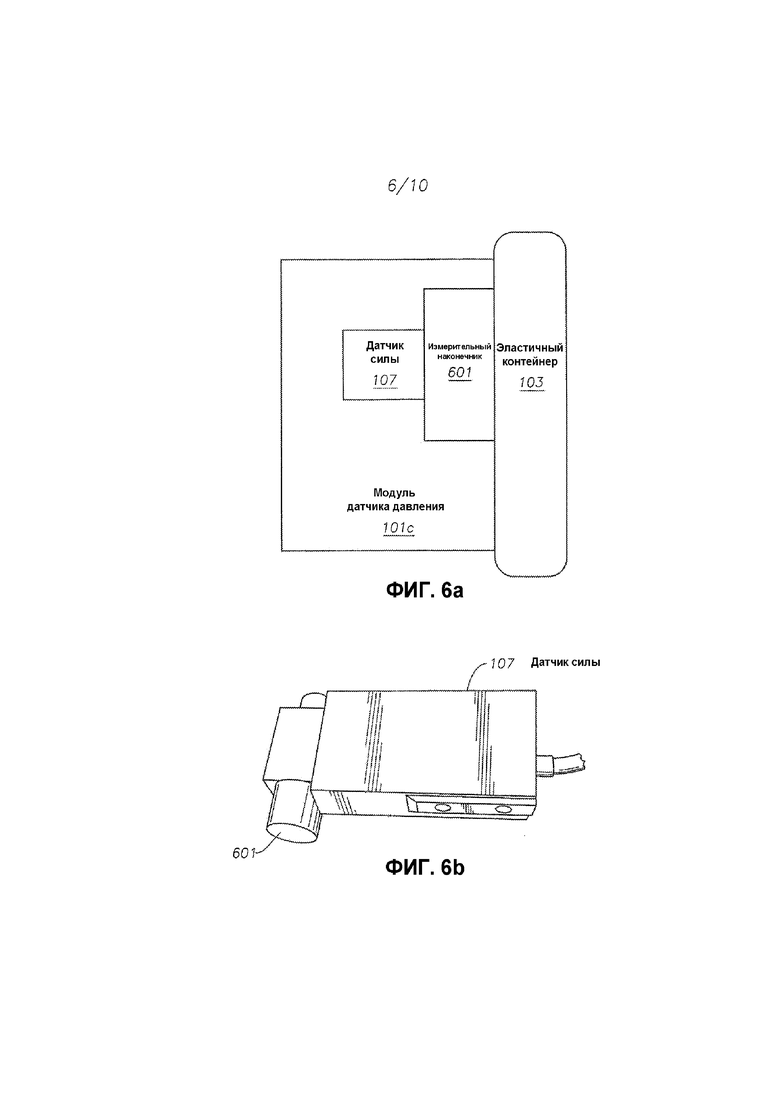
Фиг. 6a-b иллюстрируют систему измерения давления, в которой используется тензодатчик и измерительный наконечник, соприкасающийся с эластичным контейнером согласно варианту реализации изобретения;
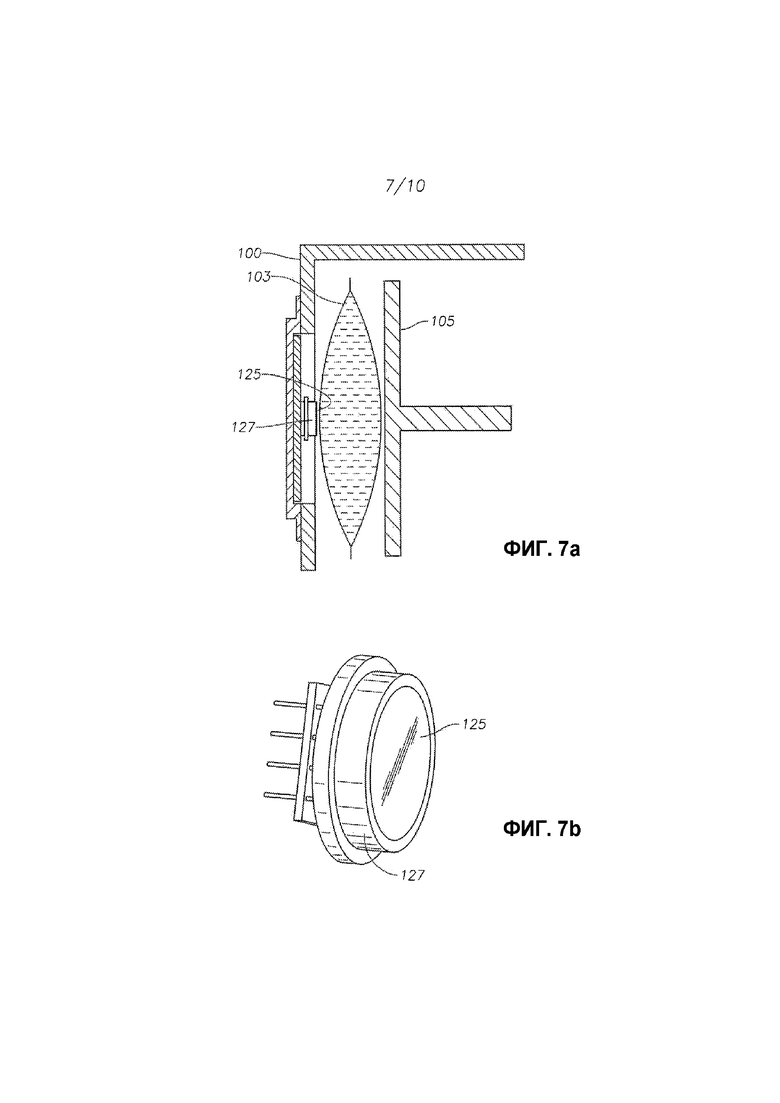
Фиг. 7a-b иллюстрируют систему измерения давления с датчиком давления, имеющим мембрану, согласно варианту реализации изобретения;
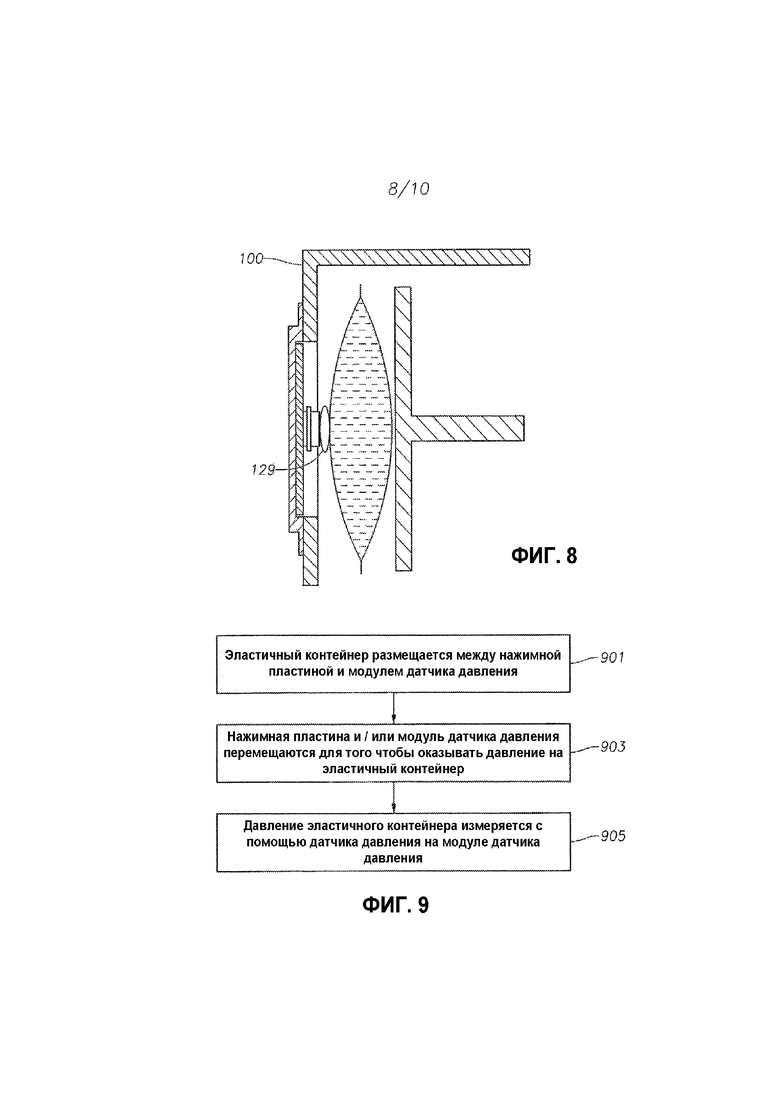
Фиг. 8 иллюстрирует систему измерения давления с дополнительным пакетом для распределения давления, который расположен между мембраной датчика давления и эластичным контейнером согласно варианту реализации изобретения;
Фиг. 9 иллюстрирует функциональную схему последовательности операций способа для измерения давления, связанного с эластичным контейнером, согласно варианту реализации изобретения;
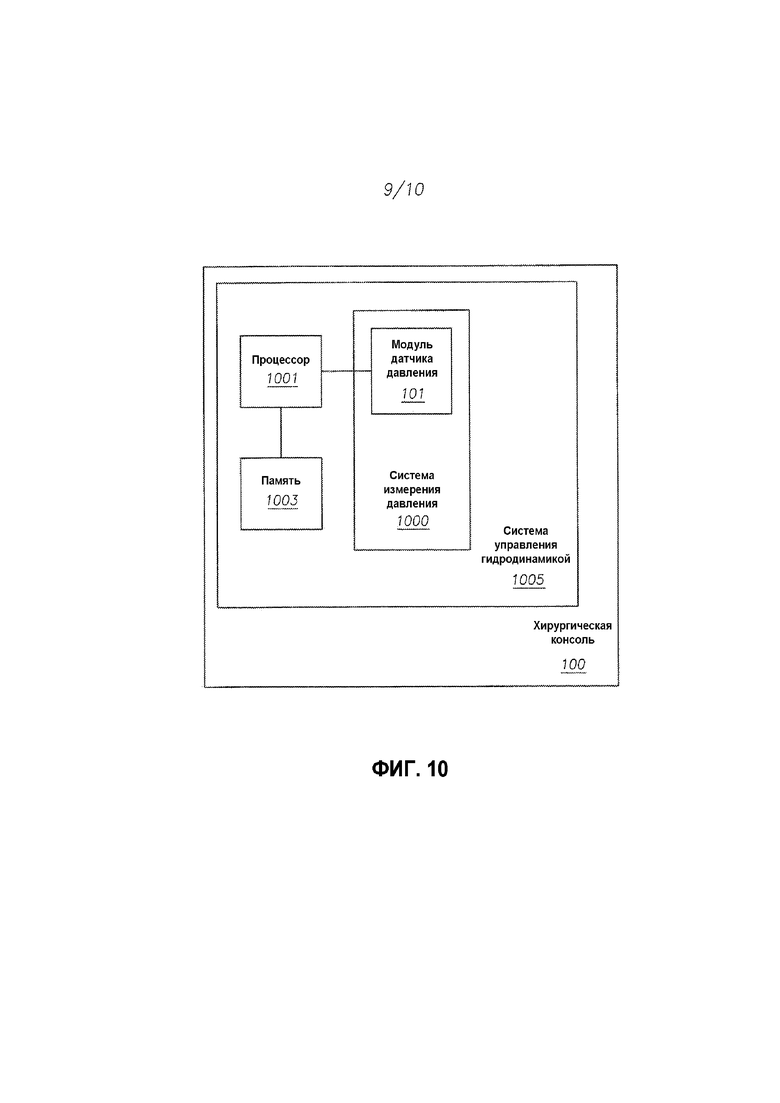
Фиг. 10 иллюстрирует систему измерения давления согласно варианту реализации изобретения; и
Фиг. 11 иллюстрирует cистему управления гидродинамикой, которая содержит модуль датчика давления.
Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются только пояснительными и приводятся в качестве примера, и предназначены для обеспечения дополнительного разъяснения настоящего заявленного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Фиг. 1 иллюстрирует вариант реализации изобретения эластичного контейнера 103, который расположен между модулем датчика давления 101 и нажимной пластиной 105. В различных вариантах реализации изобретения хирургическая консоль 100 (к примеру, офтальмологическая хирургическая консоль) используется для доставки находящейся под давлением ирригационной жидкости к части тела (такой как глаз) во время хирургической операции (например, как описано в патенте США №7806865, серийный номер 12/469354, от Daniel J. Wilson, поданной 20 мая 2009, содержание которого включено в настоящее описание посредством ссылки во всей своей полноте, как если бы целиком и полностью изложено в данном документе). В некоторых вариантах реализации изобретения находящаяся под давлением система содержит нажимную пластину 105 и модуль датчика давления 101. Нажимная пластина 105 выполнена с возможностью перемещения по отношению к модулю датчика давления 101 для того, чтобы оказать давление на эластичный контейнер 103 (к примеру, пакет с ирригационной жидкостью, такой как BSS™ (сбалансированный солевой раствор)), который находится между нажимной пластиной 105 и модулем датчика давления 101. В некоторых вариантах реализации изобретения нажимная пластина 105 может содержать жесткий материал (к примеру, жесткий пластик, металл и т.д.) или может содержать эластичный материал (к примеру, эластичную полосу, описанную в патенте США №7806865). Нажимная пластина 105 представляет поверхность, которая контактирует с по меньшей мере частью эластичного контейнера 103 для сжатия эластичного контейнера 103. В некоторых вариантах реализации изобретения значение величины площади контактной поверхности между эластичным контейнером 103 и нажимной пластиной 105 является вычисленным и сохраняется в консоли.
В некоторых вариантах реализации изобретения нажимная пластина 105 может быть перемещена с помощью силового привода 113 (такого как электрический двигатель (к примеру, шаговый двигатель), пневматический цилиндр, электромагнит и т.д.). В некоторых вариантах реализации изобретения нажимная пластина 105 нажимается/оттягивается с контролируемой скоростью при помощи шагового двигателя или электромагнита под контролем cистемы управления гидродинамикой 1005 (к примеру, см. Фиг. 10). В некоторых вариантах реализации изобретения cистема управления гидродинамикой использует определение давления эластичного контейнера 103 (к примеру, которое определяется с помощью модуля датчика давления 101) для того, чтобы управлять перемещением нажимной пластины 105. К примеру, перемещение нажимной пластины возможно замедлить, остановить или изменить направление перемещения на обратное для уменьшения давления в эластичном контейнере 103 или же скорость перемещения нажимной пластины может быть, наоборот, увеличена для того, чтобы увеличить давление в эластичном контейнере 103. Скорость перемещения нажимной пластины также поддерживается в тех случаях, когда желаемое давление эластичного контейнера 103 измеряется при помощи модуля датчика давления 101.
Фиг. 2a-b иллюстрируют различные варианты реализации изобретения модулей датчиков давления 101 (конкретные варианты реализации изобретения модуля показаны, как ссылочные позиции 101а, 101b и т.д., а модуль указан, в большинстве случаев, как ссылочная позиция "101"). Модуль датчика давления 101а содержит один или более датчиков усилия 107 (к примеру, датчики усилия 107 а, b, и т.д.) для того, чтобы измерить усилие, которое действует на модуль датчика давления 101а со стороны эластичного контейнера 103 в связи с тем, что давление прикладывается к эластичному контейнеру 103 со стороны нажимной пластины 105. В различных вариантах реализации изобретения датчики усилия являются наружными по отношению к системе циркуляции жидкости пациента (и, по этой причине, являются неинвазивными к системе подачи жидкости). Датчики усилия могут содержать тензодатчики (к примеру, тензорезисторные тензодатчики или тензодатчики на гидравлической или пневматической основе), пьезокристаллические датчики и т.д. Как иллюстрировано на Фиг. 2а, в некоторых вариантах реализации изобретения модуль датчика давления 101а содержит контактную пластину пакета 109, а датчик усилия 107а измеряет усилие, которое действует на контактную пластину пакета 109 со стороны эластичного контейнера 103, расположенного между контактной пластиной пакета 109 и нажимной пластиной 105. При использовании, площадь контакта между эластичным контейнером 103 и контактной пластиной пакета 109, и усилие, измеренное датчиком усилия 107а, давление, связанное с эластичным контейнером 103, могут быть определены (к примеру, в соответствии с формулой: Давление = Усилие/Площадь). Давление, связанное с эластичным контейнером, представляет собой давление, которое является идентичным с давлением внутри эластичного контейнера, давление, которое является пропорциональным давлению внутри эластичного контейнера, или может включать в себя давление, которое коррелирует с давлением внутри эластичного контейнера (к примеру, измеренное модулем датчика давления давление может быть записано для известного давления эластичного контейнера (например, в управляемом модельном эксперименте), и корреляции могут быть использованы для аппроксимации фактического давления в эластичном контейнере на основе измеренного давления от модуля датчика давления во время фактического использования). Как иллюстрировано на Фиг. 2b, в некоторых вариантах реализации изобретения модуль датчика давления 101b не содержит контактную пластину пакета 109. В некоторых вариантах реализации изобретения модуль датчика давления 101b содержит один или более датчиков усилия 107а,b в ряде датчиков усилия 111, которые измеряют усилие в различных точках эластичного контейнера 103.
На Фиг. 3 проиллюстрирован вид в разрезе варианта реализации изобретения системы измерения давления (показанного на части хирургической консоли 100) с шарнирно закрепленной контактной пластиной пакета 109. В некоторых вариантах реализации изобретения модуль датчика давления 101 содержит шарнирное соединение 301 на конце контактной пластины пакета 109, а датчик усилия 107а (к примеру, тензодатчик) расположен для измерения усилия, действующего на датчик усилия 107а со стороны контактной пластины пакета 109 в связи с тем, что контактная пластина пакета 109 поворачивается по отношению к шарнирному соединению 301 в тех случаях, когда к контактной пластине пакета 109 со стороны эластичного контейнера 103, расположенного между нажимной пластиной 105 и контактной пластиной пакета 109 прилагается усилие. В некоторых вариантах реализации изобретения шарнирное соединение содержит фиксированный стержень (к примеру, фиксированный по отношению к хирургической консоли 100) через центр в полой цилиндрической части контактной пластины пакета 109, что обеспечивает возможность контактной пластине пакета 109 вращаться относительно фиксированного стержня. Также предполагаются другие конфигурации шарнирного соединения. В некоторых вариантах реализации изобретения усилие, действующее на датчик усилия 107а, является связанным с площадью контакта между эластичным контейнером 103, который охватывает большую площадь, чем площадь контактной пластины пакета 109, которая находится непосредственно над датчиком усилия 107а (большая площадь контакта между эластичным контейнером и контактной пластиной пакета учитывается при определении давления эластичного контейнера на основании измеренного усилия от датчика усилия 107а (например, давление эластичного контейнера = измеренное усилие от датчика усилия 107а, умноженное на два (потому что половина усилия проходит через шарнирное соединение)/площадь контакта между эластичным контейнером и контактной пластиной пакета 109)). Также могут быть использованы другие расчеты (к примеру, уравнения для давления могут изменяться, принимая во внимание расположение датчика усилия 107а относительно шарнирного соединения, расстояние между площадью контакта (между эластичным контейнером и контактной пластиной пакета) и центром контактной пластины пакета, и т.д.). В некоторых вариантах реализации изобретения к примеру, со сложными конструкциями контактной пластины пакета, эластичного контейнера, и датчика усилия, давление эластичного контейнера в сопоставлении с измеренным усилием смоделировано (например, с помощью нескольких известных давлений эластичного контейнера и определения их результирующего усилия для того, чтобы сформировать уравнение (или диаграмму), связывающее измеренное усилие с давлением эластичного контейнера).
Фиг. 4a-b иллюстрируют вариант реализации изобретения системы измерения давления (показанный на части хирургической консоли 100) с контактной пластиной пакета 109, которая имеет ряд датчиков усилия 111а (к примеру, содержит множество датчиков усилия 107а-d). В некоторых вариантах реализации изобретения монтажная пластина 121 используется для крепления контактной пластины пакета 109 к хирургической консоли 100. В некоторых вариантах реализации изобретения модуль датчика давления 101 содержит более чем один датчик усилия 107, расположенный на противостоящей стороне контактной пластины пакета 109 в связи с тем, что сторона контактной пластины пакета 109 соприкасается с эластичным контейнером 103. Выходные данные от датчиков усилия 107a-d в ряде датчиков 111а могут быть, к примеру, включены, усреднены или сравнены для того, чтобы определить относительное усилие на модуле датчика давления 101. В некоторых вариантах реализации изобретения для того, чтобы определить давление эластичного контейнера, измеренное усилие на каждом датчике 107 суммируется, а итоговая сумма делится на величину площади контактной пластины пакета 109. Как было отмечено выше, в некоторых вариантах реализации изобретения уравнение (или диаграмма), которые связывают измеренное усилие и соответствующее давление внутри эластичного контейнера, могут быть смоделированы (на основе известных давлений и их результирующей измеренных усилий).
Фиг. 5a-b иллюстрируют вариант реализации изобретения системы измерения давления (показанный на части хирургической консоли 100) с рядом датчиков усилия 111b (к примеру, содержащий ряд емкостных датчиков). В некоторых вариантах реализации изобретения датчик усилия 107 содержит один или более емкостных датчиков в ряде 111b, которые соприкасаются с эластичным контейнером 103. Также предполагаются другие типы датчиков (к примеру, проводящий полимер). В некоторых вариантах реализации изобретения ряд емкостных датчиков 111b размещен в контакте с эластичным контейнером 103 (в результате чего некоторые участки эластичного контейнера 103 находятся в контакте с различными датчиками 107 ряда емкостных датчиков 111b). В некоторых вариантах реализации изобретения монтажная пластина 123 используется для крепления ряда 111b к хирургической консоли 100. Выходные данные от емкостных датчиков в ряде емкостных датчиков 111b могут быть, к примеру, включены, усреднены или сравнены для того, чтобы определить относительное усилие на модуле датчика давления 101. В некоторых вариантах реализации изобретения для того, чтобы определить давление эластичного контейнера, измеренное усилие на емкостных датчиках суммируется, а итоговая сумма делится на величину площади контактной пластины пакета 109. Как было отмечено выше, в некоторых вариантах реализации изобретения уравнение (или диаграмма), которые связывают измеренное усилие и соответствующее давление внутри эластичного контейнера, могут быть смоделированы (на основе известных давлений и их результирующей измеренных усилий). Также предполагаются другие датчики усилия 107 и другие конструкции датчиков усилия.
В некоторых вариантах реализации изобретения как проиллюстрировано на Фиг. 6а-b, модуль датчика давления 101c содержит датчик усилия 107 с измерительным наконечником 601, который имеет поверхность, выполненную с возможностью соприкосновения с эластичным контейнером 103. Измерительный наконечник 601 представляет собой механически перемещаемый объект без фиксации положения (к примеру, рычаг, кнопка, пружинящий язычок и т.д.), который перемещается в ответ на действие усилия. Степень передвижения является пропорциональной действующему усилию. Измерительный наконечник 601 подвергается воздействию (к примеру, пружинящий язычок или рычаг при непосредственном контакте с эластичным контейнером 103) или может быть покрыт эластичным покрытием (например, мембраной), которое защищает измерительный наконечник 601, но в то же время передает наружное усилие (к примеру, со стороны эластичного контейнера 103 к измерительному наконечнику). В некоторых вариантах реализации изобретения измерительный наконечник содержит эластичное покрытие с эластичной круглой плоской поверхностью диаметром приблизительно 0,5 дюйма. Также предполагаются другие диаметры и формы (к примеру, приблизительно, в пределах от 0,1 до 1 дюйма в диаметре, приблизительно, в пределах от 1 дюйма до 5 дюймов в диаметре, и т.д.). В некоторых вариантах реализации изобретения давление пакета является пропорциональным выходному усилию на измерительном наконечнике или покрытии (которое по меньшей мере частично находится в зависимости от площади измерительного наконечника (или площади эластичного покрытия в месте соприкосновения с измерительным наконечником)). Как было отмечено выше в некоторых вариантах реализации изобретения давление определяется с помощью моделирования путем определения усилия, измеренного с помощью датчика усилия 107, и сравнивания его с фактическим давлением пакета (которое является известным в варианте моделирования). Уравнение или диаграмма выводятся для использования в реальных условиях эксплуатации для определения давления пакета с помощью измеренного фактического усилия на измерительном наконечнике или покрытии.
Как иллюстрировано на Фиг. 7а-b, модуль датчика давления 101 содержит мембрану 125 и тензодатчик 127. Модуль датчика давления 101 содержит текучую среду (к примеру, жидкости (например, воду или масло), гель, воздух и т.д.) которая отделяет мембрану 125 от внутреннего тензодатчика таким образом, что усилие, действующее на мембрану 125, распределяется по внутреннему тензодатчику через жидкость. В некоторых вариантах реализации изобретения тензодатчики могут содержать тензорезистор или могут быть на гидравлической или пневматической основе (также предполагаются и другие типы тензодатчиков).
Как иллюстрировано на Фиг. 8, пакет 129, наполненный жидкостью, размещается между мембраной 125 и эластичным контейнером для того, чтобы распределить давление, направленное со стороны эластичного контейнера на мембрану 125. К примеру, если эластичный контейнер 103 имеет участки неровности на поверхности в связи с неравномерно распределенным давлением (например, складки на поверхности), пакет 129 распределяет усилие, действующее со стороны участка неровности на тензодатчик (вместо, к примеру, части или всей складки в эластичном контейнере, которое нажимает на датчик и обусловливает локально неточные показания). Пакет может быть заполнен жидкостью (к примеру, водой или маслом), гелем, воздухом и т.д. Пакет может быть соединенным с мембраной 125 (к примеру, с помощью клея) или может свободно удерживаться рядом с мембраной 125.
Фиг. 9 иллюстрирует способ измерения давления, связанного с эластичным контейнером 103. Элементы, которые представлены в функциональной схеме, являются только иллюстративными. Различные предлагаемые элементы могут быть опущены, дополнительные элементы могут быть добавлены и/или различные элементы могут быть выполнены в другом порядке, чем представленный ниже.
Как проиллюстрировано в блоке 901, эластичный контейнер 103 размещен между нажимной пластиной 105 и модулем датчика давления 101. К примеру, пакет раствора BSS™ удерживается во взвешенном состоянии (например, за горловину, как показано на Фиг. 3) между нажимной пластиной 105 и модулем датчика давления 101. В некоторых вариантах реализации изобретения эластичный контейнер лежит горизонтально между нажимной пластиной 105 и модулем датчика давления 101. Также предполагаются другие ориентации и конфигурации соединения.
Как проиллюстрировано в блоке 903, по меньшей мере одна нажимная пластина 105 и модуль датчика давления 101 перемещаются относительно другой нажимной пластины 105 и модуля датчика давления 101 для того, чтобы оказать давление на эластичный контейнер 103. К примеру, двигатель нажимает жесткую нажимную пластину 105 для того, чтобы уменьшить пространство между нажимной пластиной 105 и модулем датчика давления 101. В качестве еще одного примера, нажимная пластина 105 представляет собой эластичную полосу, которую натягивают (к примеру, смотри патент США №7806865) для того, чтобы сжать эластичный контейнер 103 между нажимной пластиной 105 и модулем датчика давления 101.
Как проиллюстрировано в блоке 905, давление эластичного контейнера 103 измеряется при помощи датчиков усилия на модуле датчика давления 101. Датчики усилия/давления измеряют усилие, действующее со стороны поверхности эластичного контейнера 103, для того, чтобы определить внутреннее давление в эластичном контейнере 103.
Как проиллюстрировано на Фиг. 10, в некоторых вариантах реализации изобретения система измерения давления 1000 содержит один или более процессоров (к примеру, процессор 1001) или же соединена с ними. Процессор 1001 может содержать одиночные устройства обработки данных или множество устройств обработки данных. Такое устройство обработки данных может представлять собой микропроцессор, контроллер (который может представлять собой микроконтроллер), процессор для цифровой обработки сигналов, микрокомпьютер, центральный обрабатывающий модуль, матрицу логических элементов с эксплуатационным программированием, программируемое логическое устройство, машину, обладающую внутренними состояниями, логические схемы, схему управления, аналоговую схему, цифровую схему, и/или любое устройство, которое обрабатывает сигналы (аналоговые и/или цифровые), на основании инструкций по эксплуатации. Память 1003, которая соединена с процессором 1001 и/или встроена в него, может представлять собой одиночное запоминающее устройство или множество запоминающих устройств. Такое запоминающее устройство может представлять собой постоянное запоминающее устройство, оперативное запоминающее устройство, энергозависимую память, энергонезависимая память, статическое запоминающее устройство, динамическое запоминающее устройство, флэш-память, кэш-память, и/или любое устройство, которое хранит цифровую информацию. Следует обратить внимание на то обстоятельство, что когда процессоры 1001 выполняют одну или более из своих функций с помощью машины, обладающей внутренними состояниями, аналоговых схем, цифровых схем и/или логической схемы, память 1003, которая сохраняет соответствующие инструкции по эксплуатации, может быть встроена внутри или снаружи в схему, содержащую машину, обладающую внутренними состояниями, аналоговые схемы, цифровые схемы и/или логические схемы. Память 1003 сохраняет, а процессор 1001 выполняет инструкции по эксплуатации, которые соответствуют по меньшей мере некоторым из элементов, проиллюстрированных и описанных в соответствии с чертежами.
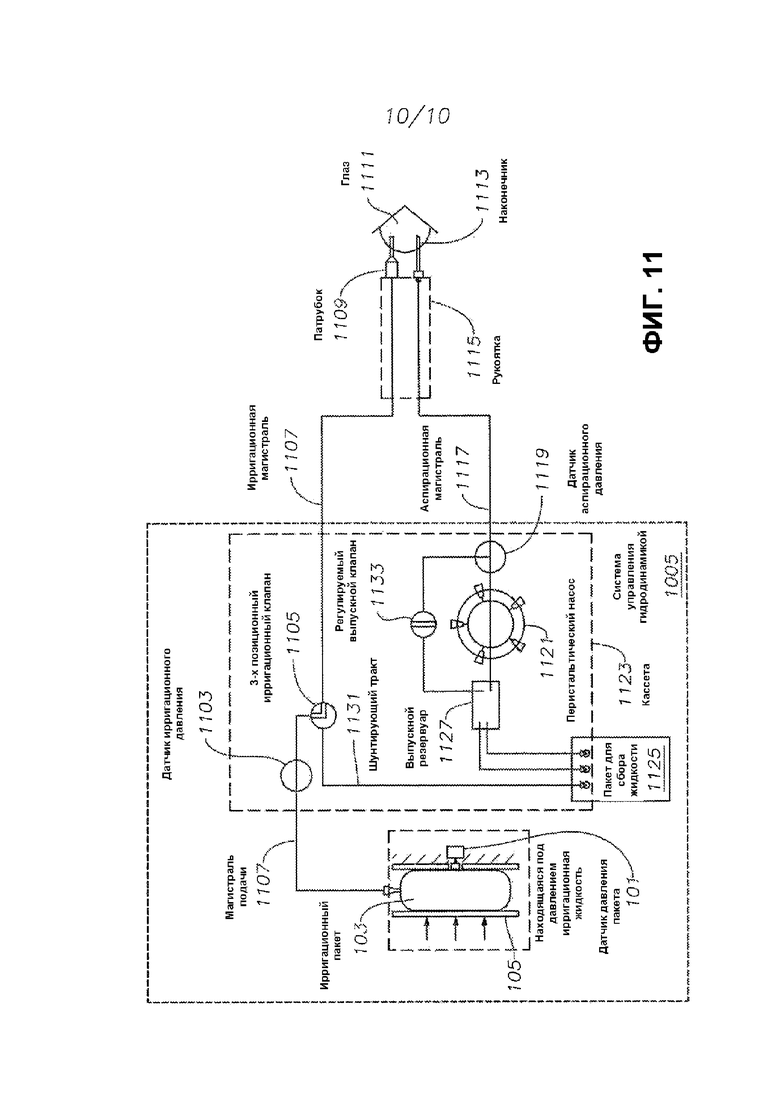
Фиг. 11 иллюстрирует cистему управления гидродинамикой 1005, которая содержит модуль датчика давления 101. В некоторых вариантах реализации изобретения cистема управления гидродинамикой 1005 содержит находящуюся под давлением ирригационную систему, которая содержит нажимную пластину 105, прикладывающую давление к эластичному контейнеру 103 (к примеру, ирригационному пакету BSS™), и модуль датчика давления 101 для измерения наружного давления на наружной стороне эластичного контейнера 103. Ирригационная жидкость из эластичного контейнера 103 протекает через магистраль подачи 1107, датчик ирригационного давления 1103, ирригационный клапан 1105 (к примеру, трехпозиционный ирригационный клапан), ирригационную магистраль 1107, рукоятку 1115, через патрубок 1109, и далее к глазному яблоку 1111. В некоторых вариантах реализации изобретения cистема управления гидродинамикой 1005 использует давление от модуля датчика давления 101 вместо или в дополнение к отдельному датчику ирригационного давления в ирригационной магистрали 1107. К примеру, модуль датчика давления 101 представляет дублирующий или отказоустойчивый датчик давления, который используется для того, чтобы остановить или ограничить скорость нажимной пластины 105 в тех случаях, когда результат измерения модулем датчика давления 101 давления на эластичном контейнере 103 является выше заранее определенного максимального давления. В некоторых вариантах реализации изобретения давление в ирригационной системе (к примеру, давление ирригационной жидкости в ирригационной магистрали и/или при введении в глазное яблоко пациента из ирригационного канала в рукоятке) определяется с использованием результата измерения давления от модуля датчика давления 101. Результат измерения давления используется для контроля системы управления работающего шагового двигателя при перемещении нажимной пластины для того, чтобы получить и далее поддерживать требуемое давление в пакете (которое соответствует давлению в ирригационной системе). Также предполагаются другие варианты применения показаний давления от модуля датчика давления 101, (к примеру, для того, чтобы определить, когда пакет является пустым или почти пустым, и чтобы определить, имеется ли пакет в наличии, а также подтвердить показания датчика ирригационного давления и т.д.).
В некоторых вариантах реализации изобретения модуль датчика давления 101 используется для определения скорости потока ирригационного раствора. К примеру, величина давления от модуля датчика давления 101 коррелируется с величинами различных скоростей потока жидкости, и эти данные сохраняются в системе (например, в памяти 1003), в результате чего при измерении давления во время работы соответствующие данные скорости потока извлекаются и используются с помощью cистемы управления гидродинамикой 1005. Жидкость возвращается в cистему управления гидродинамикой 1005 путем аспирирования через наконечник 1113 сквозь рукоятку 1115 по аспирационной магистрали 1117 в кассету 1123. Аспирационная жидкость протекает через датчик аспирационного давления 1119 и перистальтический насос 1121 (который обеспечивает всасывание для аспирации) в выпускной резервуар 1127 и далее в пакет для сбора жидкости 1125. Жидкость может протекать через регулируемый выпускной клапан 1133 в тех случаях, когда регулируемый выпускной клапан открыт (к примеру, во время выпуска или спуска). В некоторых вариантах реализации изобретения ирригационная жидкость протекает через шунтирующий тракт 1131 от ирригационного клапана 1105 (к примеру, во время проведения спуска).
Специалистом в данной области техники в представленных вариантах реализации изобретения могут быть сделаны различные модификации. Другие варианты реализации изобретения будут очевидны для специалистов в данной области из рассмотрения настоящего подробного описания и практического применения в соответствии с настоящим изобретением, описанным в настоящем документе. Предполагается, что настоящее подробное описание и примеры следует рассматривать только как приводимые в качестве примера, а истинный объем и сущность изобретения указаны в следующей формуле изобретения и ее эквивалентах.
Группа изобретений относится к медицине. Хирургическая консоль содержит: нажимную пластину; и модуль датчика давления, содержащий датчик усилия; при этом нажимная пластина выполнена с возможностью перемещения относительно модуля датчика давления; и модуль датчика давления выполнен с возможностью измерения усилия, приложенного к модулю датчика давления эластичным контейнером, расположенным между модулем датчика давления и нажимной пластиной, причем указанное усилие используется для определения давления, связанного с эластичным контейнером. Способ измерения давления связан с эластичным контейнером, согласно которому: размещают эластичный контейнер между нажимной пластиной и модулем датчика давления; перемещают нажимную пластину и модуль датчика давления для приложения давления к эластичному контейнеру; и измеряют давление, связанное с эластичным контейнером, с помощью модуля датчика давления. Хирургическая система содержит: хирургическую консоль, эластичный контейнер, представляющий собой ирригационный пакет, помещенный между нажимной пластиной и контактирующей с пакетом пластиной хирургической консоли, ирригационную магистраль, сообщающуюся по текучей среде с ирригационным пакетом и выполненную с возможностью такого соединения с рукояткой, что жидкость из ирригационного пакета проходит по ирригационной магистрали в рукоятку. При этом хирургическая система выполнена с возможностью сравнения давления, измеренного модулем датчика давления хирургической консоли, с предварительно заданным максимальным давлением для управления перемещением нажимной пластины хирургической консоли для регулирования потока ирригационной жидкости из ирригационного пакета в ирригационную магистраль. Применение данной группы изобретений позволит расширить арсенал технических средств. 3 н. и 17 з.п. ф-лы, 11 ил.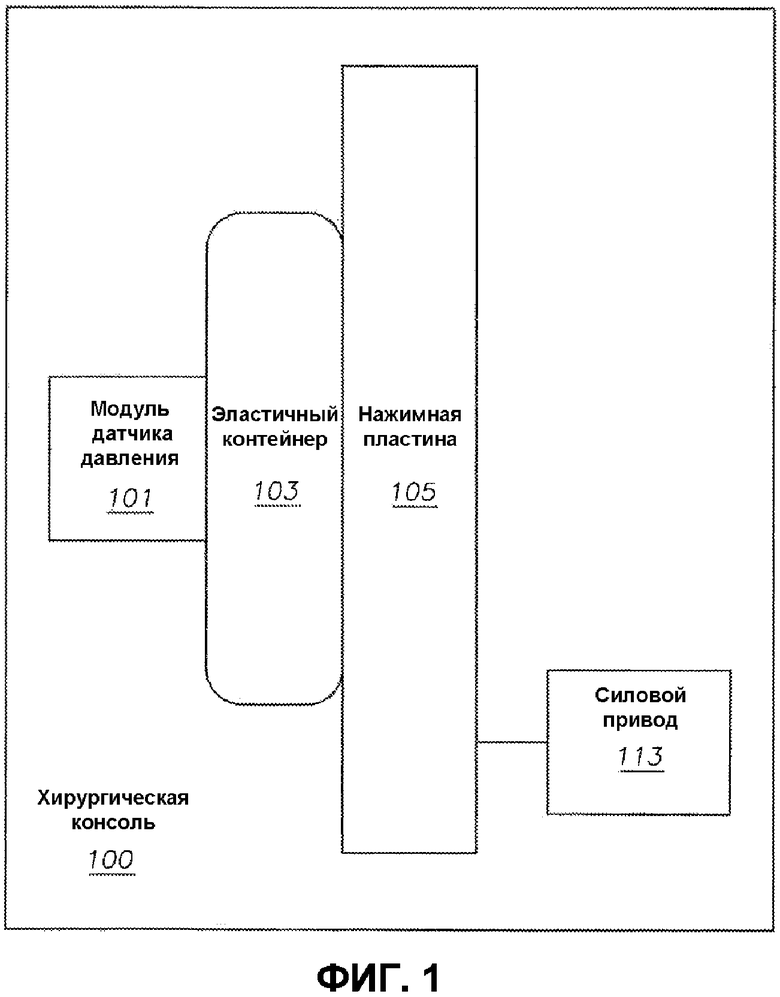
1. Хирургическая консоль, содержащая:
нажимную пластину; и
модуль датчика давления, содержащий датчик усилия;
при этом нажимная пластина выполнена с возможностью перемещения относительно модуля датчика давления; и
модуль датчика давления выполнен с возможностью измерения усилия, приложенного к модулю датчика давления эластичным контейнером, расположенным между модулем датчика давления и нажимной пластиной, причем указанное усилие используется для определения давления, связанного с эластичным контейнером.
2. Хирургическая консоль по п. 1, в которой модуль датчика давления содержит контактирующую с пакетом пластину;
при этом датчик усилия измеряет усилие, приложенное контактирующей с пакетом пластиной к датчику усилия, причем усилие, создаваемое контактирующей с пакетом пластиной, является усилием контакта с эластичным контейнером, расположенным между контактирующей с пакетом пластиной и нажимной пластиной.
3. Хирургическая консоль по п. 2, в которой давление, связанное с эластичным контейнером, определяется с использованием, по меньшей мере, измеренного усилия и площади контакта между эластичным контейнером и контактирующей с пакетом пластиной.
4. Хирургическая консоль по п. 2, в которой модуль датчика давления дополнительно содержит шарнирное соединение на конце контактирующей с пакетом пластины;
причем датчик усилия выполнен с возможностью измерения усилия, приложенного контактирующей с пакетом пластиной к датчику усилия, когда контактирующая с пакетом пластина поворачивается относительно шарнирного соединения при приложении эластичным контейнером, расположенным между контактирующей с пакетом пластиной и нажимной пластиной, усилия к контактирующей с пакетом пластине.
5. Хирургическая консоль по п. 2, в котрой модуль датчика давления содержит множество датчиков усилия, расположенных на противоположной стороне контактирующей с пакетом пластины, когда сторона контактирующей с пакетом пластины контактирует с эластичным контейнером.
6. Хирургическая консоль по п. 1, в которой датчик усилия содержит емкостный датчик, контактирующий с эластичным контейнером.
7. Хирургическая консоль по п. 1, в которой датчик усилия содержит измерительный наконечник, выполненный с возможностью регистрирования усилия от эластичного контейнера.
8. Хирургическая консоль по п. 1, в которой датчик усилия содержит мембрану и тензодатчик с жидкостью, отделяющей мембрану от тензодатчика таким образом, что усилие, приложенное к мембране, с помощью жидкости передается на тензодатчик.
9. Хирургическая консоль по п. 8, дополнительно содержащая пакет, наполненный жидкостью, при этом пакет расположен между мембраной и эластичным контейнером для распределения давления от эластичного контейнера по мембране.
10. Способ измерения давления, связанного с эластичным контейнером, согласно которому:
размещают эластичный контейнер между нажимной пластиной и модулем датчика давления;
перемещают, по меньшей мере, одну нажимную пластину и модуль датчика давления для приложения давления к эластичному контейнеру; и
измеряют давление, связанное с эластичным контейнером, с помощью модуля датчика давления.
11. Способ по п. 10, согласно которому модуль датчика давления содержит контактирующую с пакетом пластину; причем
при измерении давления, связанного с эластичным контейнером, с помощью модуля датчика давления измеряют, по меньшей мере, одним датчиком усилия на модуле датчика давления усилие, приложенное к, по меньшей мере, одному датчику усилия контактирующей с пакетом пластиной, при этом усилие от контактирующей с пакетом пластины является усилием контакта с эластичным контейнером, расположенным между контактирующей с пакетом пластиной и нажимной пластиной.
12. Способ по п. 11, согласно которому модуль датчика давления дополнительно содержит шарнирное соединение на конце контактирующей с пакетом пластины;
при этом при измерении давления, связанного с эластичным контейнером, с помощью модуля датчика давления измеряют, по меньшей мере, одним датчиком усилия на модуле датчика давления усилие, приложенное к, по меньшей мере, одному датчику усилия контактирующей с пакетом пластиной, когда контактирующая с пакетом пластина поворачивается относительно шарнирного соединения при приложении эластичным контейнером, расположенным между контактирующей с пакетом пластиной и нажимной пластиной, усилия к контактирующей с пакетом пластине.
13. Способ по п. 11, согласно которому при измерении давления, связанного с эластичным контейнером, с помощью модуля датчика давления измеряют давление модулем датчика давления с помощью множества датчиков усилия, расположенных на противоположной стороне контактирующей с пакетом пластины, когда сторона контактирующей с пакетом пластины контактирует с эластичным контейнером;
при этом давление, связанное с эластичным контейнером, определяют с использованием совокупного усилия, измеряемого с помощью множества датчиков усилия, и площади контакта между эластичным контейнером и контактирующей с пакетом пластиной.
14. Способ по п. 10, согласно которому при измерении давления, связанного с эластичным контейнером, с помощью модуля датчика давления измеряют давление, по меньшей мере, одним емкостным датчиком на модуле датчика давления при контакте с эластичным контейнером.
15. Способ по п. 10, согласно которому при измерении давления, связанного с эластичным контейнером, с помощью модуля датчика давления измеряют с помощью ряда емкостных датчиков усилие от эластичного контейнера в нескольких точках контакта с эластичным контейнером.
16. Способ по п. 10, согласно которому при измерении давления, связанного с эластичным контейнером, с помощью модуля датчика давления измеряют, по меньшей мере, одним датчиком усилия, имеющим измерительный наконечник на модуле датчика давления, усилие напротив поверхности измерительного наконечника, выполненного с возможностью контактирования с эластичным контейнером.
17. Способ по п. 10, согласно которому при измерении давления, связанного с эластичным контейнером, с помощью модуля датчика давления усилие измеряют с помощью тензодатчика с жидкостью, отделяющей мембрану от тензодатчика, таким образом, что усилие, воздействующее на мембрану, передается на тензодатчик с помощью жидкости.
18. Способ по п. 17, согласно которому при измерении давления, связанного с эластичным контейнером, с помощью модуля датчика давления усилие измеряют с помощью пакета, наполненного жидкостью, при этом пакет размещают между мембраной и эластичным контейнером для распределения давления от эластичного контейнера по мембране.
19. Хирургическая система, содержащая:
хирургическую консоль по любому из пп. 1-9,
эластичный контейнер, представляющий собой ирригационный пакет, помещенный между нажимной пластиной и контактирующей с пакетом пластиной хирургической консоли,
ирригационную магистраль, сообщающуюся по текучей среде с ирригационным пакетом и выполненную с возможностью такого соединения с рукояткой, что жидкость из ирригационного пакета проходит по ирригационной магистрали в рукоятку;
при этом хирургическая система выполнена с возможностью сравнения давления, измеренного модулем датчика давления хирургической консоли, с предварительно заданным максимальным давлением для управления перемещением нажимной пластины хирургической консоли для регулирования потока ирригационной жидкости из ирригационного пакета в ирригационную магистраль.
20. Хирургическая система по п. 19, дополнительно содержащая отдельный датчик ирригационного давления, соединенный с ирригационной магистралью, и выполненная с возможностью сравнения давления, измеренного модулем датчика давления хирургической консоли, с давлением, измеренным отдельным датчиком ирригационного давления.
| US 20060285986 A1, 21.12.2006 | |||
| US 20020077587 A1, 20.06.2002 | |||
| US 5733256 A1, 31.03.1998 | |||
| US 20110046558 A1, 24.02.2011 | |||
| ЗАПРАВКА МИКРОХИРУРГИЧЕСКОЙ СИСТЕМЫ | 2006 |
|
RU2459635C1 |

