УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к факоэмульсификации и хирургии, в частности, к управлению потоком текучей среды во время операции.
Человеческий глаз функционирует для того, чтобы обеспечить зрение посредством пропускания света сквозь прозрачную наружную часть, называемую роговицей, и фокусировки изображения на сетчатке посредством хрусталика. Качество сфокусированного изображения зависит от многих факторов, включающих размер и форму глаза, а также прозрачность роговицы и хрусталика. В тех случаях, когда возраст или заболевание являются причиной того, что хрусталик становится менее прозрачным, зрение ухудшается из-за уменьшения количества света, которое может быть пропущено к сетчатке. Эта патология в хрусталике глаза является известной в медицине как катаракта. Общепринятым лечением этого состояния является хирургическое удаление хрусталика и замена функции хрусталика с помощью искусственной интраокулярной линзы (ИОЛ).
В Соединенных Штатах большинство катарактных хрусталиков удаляют при помощи хирургического метода, который называется факоэмульсификацией. Типичный хирургический инструмент, который является подходящим для операций факоэмульсификации катарактных хрусталиков, состоит из рукоятки с ультразвуковым приводом, прикрепленной пустотелой режущей иглы, окруженной ирригационным патрубком, и электронного пульта управления. Рукоятка соединена с пультом управления электрическим кабелем и гибким трубопроводом. Через электрический кабель пульт управления изменяет уровень мощности, которая передается с помощью рукоятки прикрепленной режущей игле. С помощью гибкого трубопровода осуществляется подача ирригационной жидкости в глаз и отсасывание аспирационной жидкости из глаза через рукоятку.
Во время операции факоэмульсификации тонкий конец режущей иглы и конец ирригационного патрубка вводят в передний сегмент глазного яблока через небольшой разрез в наружных тканях глазного яблока. Хирург осуществляет взаимодействие тонким концом режущей иглы с хрусталиком глаза таким образом, что вибрирующий тонкий конец измельчает хрусталик на фрагменты. Полученные в результате фрагменты аспирируются из глазного яблока через внутренний канал режущей иглы вместе с ирригационной жидкостью, которая поступает в глазное яблоко во время операции, а далее в емкость для отходов.
В течение всего времени операции ирригационная жидкость вливается в глазное яблоко, проходит между ирригационным патрубком и режущей иглой и выходит внутри глазного яблока из наконечника ирригационного патрубка и/или из одного или более портов или отверстий, выполненных в ирригационном патрубке вблизи его конца. Эта ирригационная жидкость имеет особо важное значение в связи с тем, что она предотвращает коллапс глазного яблока во время удаления эмульгированного хрусталика. Ирригационная жидкость также защищает ткани глазного яблока от тепла, которое выделяется при вибрировании ультразвуковой режущей иглы. Более того, ирригационная жидкость удерживает во взвешенном состоянии фрагменты эмульгированного хрусталика для аспирации из глазного яблока.
Повсеместно применяемые системы применяют в качестве источника ирригационной жидкости заполненные жидкостью бутылки или подвешенные на штативе для внутривенных вливаний (IV) пакеты. Скорости подачи ирригационной жидкости к глазу и соответствующее давление жидкости регулируются путем регулирования высоты штатива для внутривенных вливаний (IV) над операционным полем. К примеру, поднятие штатива для внутривенных вливаний (IV) приводит к соответствующему увеличению давления напора и увеличению давления жидкости в глазном яблоке, в результате чего соответствующим образом увеличивается скорость подачи ирригационной жидкости. Таким же образом, опускание штатива для внутривенных вливаний (IV) приводит к соответствующему уменьшению давления в глазном яблоке и соответствующей скорости подачи ирригационной жидкости в глазное яблоко.
Скорости потока аспирации жидкости из глаза, как правило, регулируются при помощи аспирационного насоса. Действие насоса вызывает аспирацию протекающей жидкости через внутренний канал режущей иглы. Аспирация протекающей жидкости приводит к образованию вакуума в аспирационной магистрали. Аспирация протекающей жидкости и/или вакуум направлены на достижение желаемого достаточного результата при удалении хрусталика. Высота штатива для внутривенных вливаний (IV) и ирригационный насос регулируются для достижения надлежащего баланса во внутриглазной камере при попытке сохранить относительно постоянное давление жидкости в операционном поле внутри глазного яблока.
В то время как во время операции факоэмульсификации является желательным стабильное давление жидкости в глазном яблоке, обычным явлением в ходе операции факоэмульсификации является появление различных скоростей потока жидкости, которые возникают в течение всего времени хирургической операции. Различные скорости потока жидкости приводят к различным потерям давления при прохождении ирригационной жидкости от источника подачи ирригационной жидкости к глазному яблоку, тем самым вызывая изменения давления в передней камере (также называется внутриглазным давлением или ВГД). Более высокие скорости потока жидкости приводят к большим потерям давления и снижению ВГД. В связи со снижением ВГД происходит уменьшение свободного пространства внутри глазного яблока.
Еще одно частое затруднение в ходе операции факоэмульсификации возникает из-за закупорки или окклюзии аспирационной иглы. В связи с тем, что ирригационная жидкость и эмульгированная ткань аспирируются из внутренней части глазного яблока через пустотелую режущую иглу, кусочки ткани, которые являются большими, чем диаметр отверстия иглы, могут закупорить тонкий конец иглы. В то время как наконечник является закупоренным, внутри тонкого конца создается давление вакуума. Полученное в результате падение давления в передней камере глазного яблока при удалении закупорки является известным как постокклюзионная волна. Эта постокклюзионная волна, в некоторых случаях, может привести к слишком быстрой аспирации относительно большого количества жидкости и ткани за пределы глазного яблока, что потенциально может стать причиной коллапса глазного яблока и/или причиной разрыва капсулы хрусталика.
Для того чтобы уменьшить эту волну, были испробованы различные технологии, такие как, к примеру, продувка аспирационной магистрали или ограничение иным способом повышения отрицательного давления в аспирационной системе. Тем не менее, сохраняется потребность в улучшенных факоэмульсификационных устройствах, в том числе в ирригационных системах, которые снижают постокклюзионную волну, а также поддерживают стабильное ВГД при всех различных параметрах потока жидкости.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном варианте реализации изобретения в соответствии с принципами настоящего изобретения настоящее изобретение представляет хирургическую систему, содержащую источник ирригационной жидкости, находящейся под давлением; ирригационную магистраль, выполненную с возможностью жидкостного соединения с источником ирригационной жидкости, находящейся под давлением; рукоятку, выполненную с возможностью жидкостного соединения с ирригационной магистралью; датчик ирригационного давления, расположенный внутри или вдоль источника ирригационной жидкости, находящейся под давлением или ирригационной магистрали; и контроллер для управления источником ирригационной жидкости, находящейся под давлением. Контроллер управляет источником ирригационной жидкости, находящейся под давлением на основе показаний датчика ирригационного давления и расчетной величины количества протекающей жидкости с корректировкой за счет поправочного коэффициента.
Хирургическая система также содержит дисплей и устройство ввода контроллера. Устройство ввода контроллера принимает желаемое значение внутриглазного давления, а контроллер управляет источником ирригационной жидкости, находящейся под давлением таким образом, чтобы поддерживать желаемое значение внутриглазного давления. Устройство ввода контроллера получает желаемый диапазон значений внутриглазного давления и контроллер управляет источником ирригационной жидкости, находящейся под давлением таким образом, чтобы поддерживать желаемый диапазон значений внутриглазного давления. Контроллер производит вычисление внутриглазного давления в глазном яблоке на основе показаний датчика ирригационного давления, датчика источника давления, или датчика аспирационного давления, или с учетом расчетной величины количества протекающей жидкости с корректировкой за счет поправочного коэффициента. Контроллер также производит вычисление расчетной величины количества протекающей жидкости на основе показаний датчика ирригационного давления, датчика источника давления и импеданса ирригационной магистрали.
Система также содержит аспирационную магистраль, выполненную с возможностью соединения по текучей среде с рукояткой; датчик аспирационного давления, расположенный в аспирационной магистрали или рядом с ней; и аспирационный насос, выполненный с возможностью отсасывания текучей среды через аспирационную магистраль. В таком случае контроллер производит вычисление расчетной величины количества протекающей жидкости на основе показаний датчика аспирационного давления, максимальной всасывающей способности насоса, достижимой с помощью аспирационного насоса, и импеданса аспирационного насоса.
Система также содержит эластичный пакет с жидкостью и две противостоящие пластины. Эластичный пакет расположен между двумя противостоящими пластинами. В указанном случае контроллер производит вычисление расчетной величины количества протекающей жидкости на основе перемещения или передвижения двух противостоящих пластин.
В некоторых вариантах реализации изобретения поправочный коэффициент рассчитывается в зависимости от истечения жидкости в области разреза и/или степени сжатия в патрубке, игле и патрубке, выбранных для операции, или характеристик потока жидкости в комбинации иглы и патрубка. Устройство ввода контроллера принимает информацию об игле и патрубке, а затем контроллер использует информацию об игле и патрубке для того, чтобы выбрать или рассчитать поправочный коэффициент. Устройство ввода контроллера может получить поправочный коэффициент в качестве входных данных от пользователя.
Контроллер использует показания датчика аспирационного давления для того, чтобы определить наличие окклюзии или возникновение прорыва окклюзии. В таком случае контроллер управляет источником ирригационной жидкости, находящейся под давлением, для приспосабливания к изменениям в потоке жидкости, которые возникают в результате окклюзии или прорыва окклюзии. Контроллер использует показания датчика ирригационного давления для того, чтобы определить наличие окклюзии или возникновение прорыва окклюзии. В таком случае контроллер управляет источником ирригационной жидкости, находящейся под давлением, для приспосабливания к изменениям в потоке жидкости, которые возникают в результате окклюзии или прорыва окклюзии.
В других вариантах реализации настоящего изобретения хирургическая система содержит: источник ирригационной жидкости, находящейся под давлением, при этом источник ирригационной жидкости, находящейся под давлением, содержит эластичный пакет, расположенный между двумя противостоящими пластинами, причем эластичный пакет содержит жидкость; датчик положения, расположенный в или на одной из двух противостоящих пластин, наряду с этим датчик положения предназначен для определения расстояния между двумя противостоящими пластинами; привод для перемещения по меньшей мере одной из двух противостоящих пластин с возможностью сдавливания эластичного пакета; и контроллер для управления относительным перемещением противостоящих пластин. Контроллер принимает показания от датчика положения, определяет расстояние между пластинами и обеспечивает оценку количества жидкости в эластичном пакете.
В других вариантах реализации настоящего изобретения хирургическая система содержит: источник ирригационной жидкости, находящейся под давлением, источник ирригационной жидкости, находящейся под давлением, содержащий эластичный пакет, расположенный между двумя противостоящими пластинами, эластичный пакет, содержащий жидкость; шарнирно сочлененную пластину, расположенную на поверхности одной из двух противостоящих пластин; датчик источника давления, расположенный между поверхностью шарнирно сочлененной пластины и поверхностью одной из двух противостоящих пластин, в результате чего поверхность шарнирно сочлененной пластины прижимает датчик источника давления вплотную к поверхности одной из двух противостоящих пластин.
Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются только пояснительными и приводятся в качестве примера, и предназначены для обеспечения дополнительного разъяснения заявленного изобретения. Изложены последующее описание, а также практическая реализация изобретения, и рассмотрены дополнительные преимущества и цели настоящего изобретения.
В одном варианте реализации изобретения в соответствии с принципами настоящего изобретения способ управления хирургической системой с путем потока жидкости, включает: прием показаний давления от датчика ирригационного давления, расположенного по пути потока жидкости; вычисление расчетной величины количества протекающей жидкости через хирургическую систему; корректирование расчетной величины количества протекающей жидкости с учетом поправочного коэффициента; и управление источником ирригационной жидкости, находящейся под давлением, на основе показаний давления и расчетной величины количества протекающей жидкости с учетом поправочного коэффициента.
В других вариантах реализации настоящего изобретения способ также включает один или более из следующего: получение желаемой величины внутриглазного давления; и управление источником ирригационной жидкости, находящейся под давлением, таким образом, чтобы поддерживать желаемую величину внутриглазного давления; получение желаемого диапазона внутриглазного давления; и управление источником ирригационной жидкости, находящейся под давлением, таким образом, чтобы поддерживать желаемый диапазон внутриглазного давления; расчет внутриглазного давления в глазном яблоке на основании показаний от датчика ирригационного давления; расчет внутриглазного давления в глазном яблоке на основе расчетной величины количества протекающей жидкости, скорректированной с учетом поправочного коэффициента; получение показаний от датчика аспирационного давления, расположенного по пути текучей среды, максимальной всасывающей способности насоса, достижимой аспирационным насосом, и импеданса аспирационного насоса; и определение количества протекающей жидкости на основе разности между показаниями от датчика аспирационного давления и максимальной всасывающей способности насоса, достижимой аспирационным насосом; получение показаний от датчика ирригационного давления, показаний от датчика источника давления, и импеданса пути потока жидкости между датчиком источника давления и датчиком ирригационного давления; и определение количества протекающей жидкости на основе разности между показаниями от датчика ирригационного давления и датчика источника давления; получение поправочного коэффициента от пользователя; получение информации об игле и патрубке; и использование информации об игле и патрубке для того, чтобы выбрать или рассчитать поправочный коэффициент; получение показаний давления от датчика аспирационного давления, расположенного по пути текучей среды; и определение с помощью показаний давления от датчика аспирационного давления наличия окклюзии или возникновения прорыва окклюзии; приспосабливание к изменениям потока текучей среды в результате окклюзии или прорыва окклюзии; получение показаний давления от датчика ирригационного давления; и определение с помощью показаний давления от датчика ирригационного давления наличия окклюзии или возникновения прорыва окклюзии.
В других вариантах реализации изобретения в соответствии с принципами настоящего изобретения способ вычисления количества жидкости при истечении в области разреза включает: вычисление количества протекающей ирригационной жидкости; вычисление количества протекающей аспирационной жидкости; и вычитание рассчитанной величины количества протекающей аспирационной жидкости из рассчитанной величины количества протекающей ирригационной жидкости; при этом рассчитанная величина количества протекающей ирригационной жидкости и рассчитанная величина количества протекающей аспирационной жидкости определяются в результате измерений перепадов давления.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Сопроводительные графические материалы, объединенные и составляющие часть этой спецификации, иллюстрируют некоторые варианты реализации настоящего изобретения и вместе с описанием раскрывают принципы изобретения ниже.
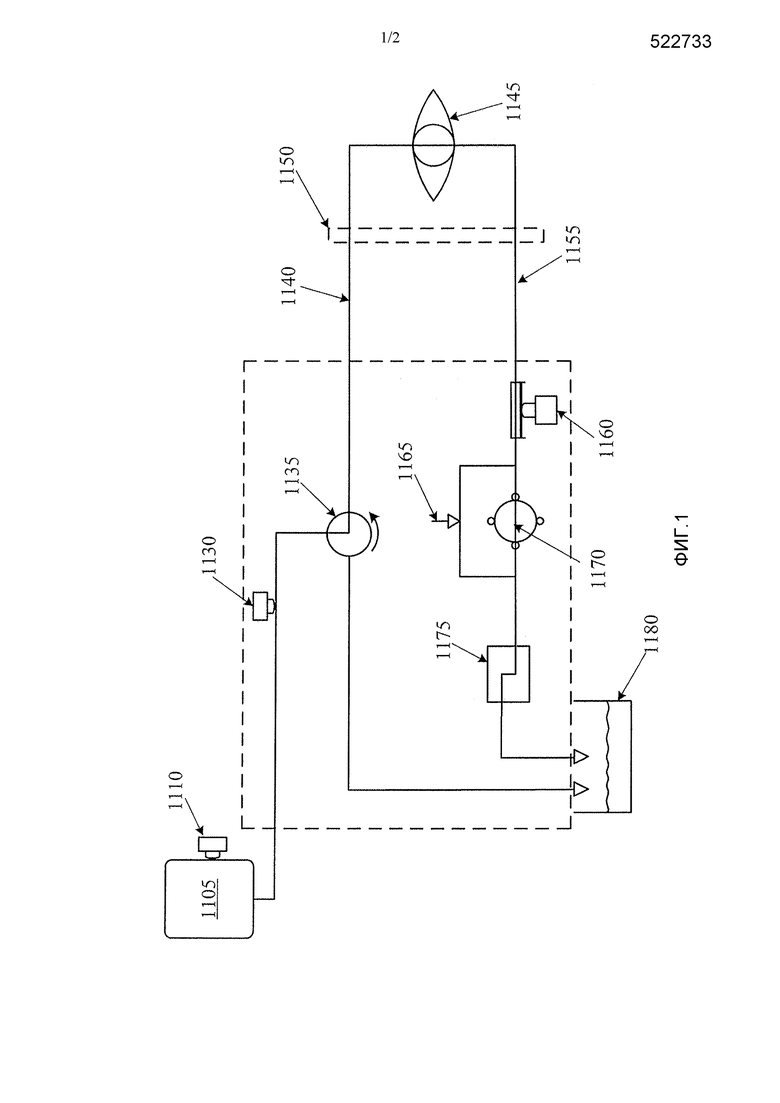
На Фиг. 1 проиллюстрирована схема составляющих элементов в системе циркуляции жидкости факоэмульсификационной системы, которая содержит источник ирригации, находящийся под давлением, в соответствии с принципами настоящего изобретения.
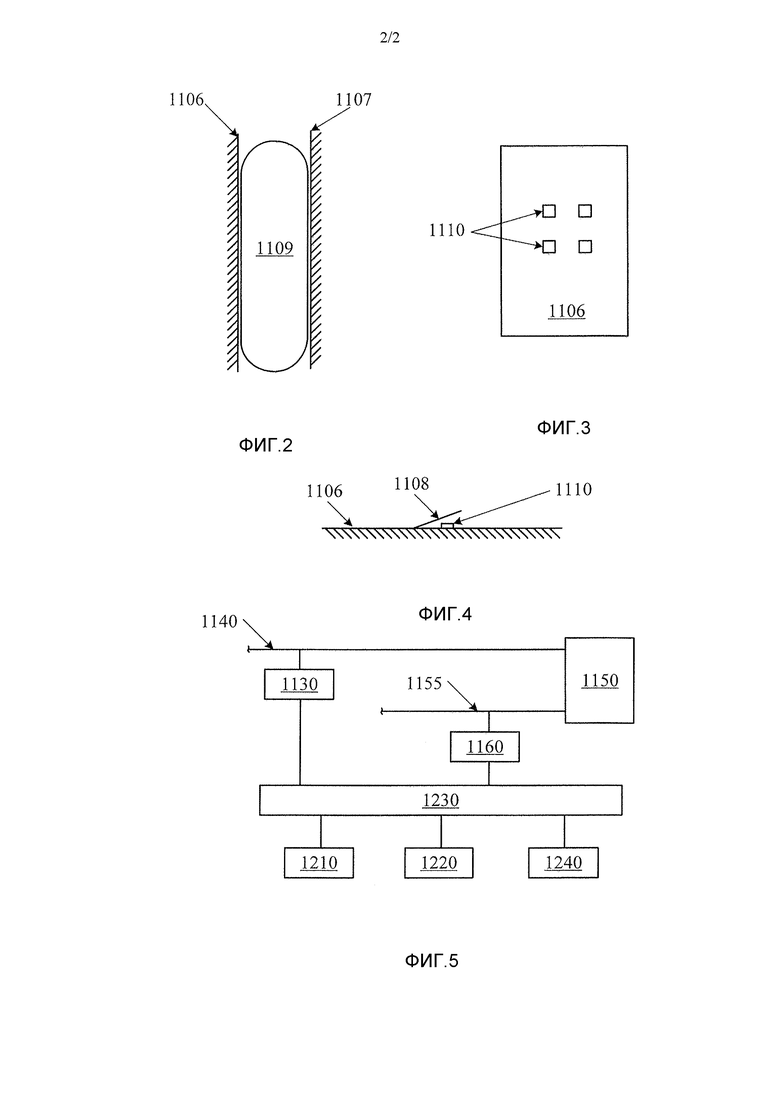
На Фиг. 2 проиллюстрирован источник ирригационной жидкости, находящейся под давлением в соответствии с принципами настоящего изобретения.
Фиг. 3 и 4 иллюстрируют шарнирно сочлененную конструкцию датчика давления для источника ирригационной жидкости, находящейся под давлением, в соответствии с принципами настоящего изобретения.
На Фиг. 5 проиллюстрирована схема составляющих элементов системы в системе управления источником ирригационной жидкости, находящейся под давлением.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Обратимся теперь к подробно описанным приводимым в качестве примера вариантам реализации изобретения, примеры которых проиллюстрированы в прилагаемых графических материалах. Везде, где это возможно, одинаковые ссылочные номера использованы на всех чертежах для обозначения одинаковых или подобных частей.
На Фиг. 1 проиллюстрирована схема составляющих элементов в системе циркуляции жидкости факоэмульсификационной системы, которая содержит источник ирригации, находящийся под давлением, в соответствии с принципами настоящего изобретения. На Фиг. 1 проиллюстрирована система циркуляции жидкости через глазное яблоко 1145 во время операции по удалению катаракты. Составляющие элементы содержат источник 1105 ирригационной жидкости, находящейся под давлением, датчик источника давления 1110, датчик ирригационного давления 1130, трехходовой клапан 1135, ирригационную магистраль 1140, рукоятку 1150, аспирационную магистраль 1155, датчик аспирационного давления 1160, выпускной клапан 1165, насос 1170, резервуар 1175 и пакет для сбора жидкости 1180. Ирригационная магистраль 1140 обеспечивает подачу ирригационной жидкости в глазное яблоко 1145 во время операции по удалению катаракты. По аспирационной магистрали 1155 удаляются текучая среда и эмульгированные частицы хрусталика из глазного яблока во время операции по удалению катаракты.
При выходе ирригационной жидкости из источника 1105 ирригационной жидкости, находящейся под давлением, она проходит через ирригационную магистраль 1140 и далее в глазное яблоко 1145. Датчик ирригационного давления 1130 измеряет давление ирригационной жидкости в ирригационной магистрали 1140. Датчик ирригационного давления 1130 может быть расположен в любом месте на всем протяжении ирригационной магистрали 1140 или канала для ирригационной жидкости. При варианте расположения в непосредственной близости к глазному яблоку 1145 датчик ирригационного давления также может быть встроен в ирригационный канал рукоятки 1150. В некоторых случаях ирригационная магистраль 1140 может содержать канал в жидкостной кассете и проходить через нее. В таком случае датчик ирригационного давления 1130 расположен в жидкостной кассете. Для целей настоящего описания ирригационная магистраль 1140 содержит гибкую трубку, канал через жидкостную кассету, жесткую трубку или другие жидкостные пути, через которые проходит ирригационная жидкость из источника 1105 ирригационной жидкости, находящейся под давлением, через рукоятку 1150 внутрь глазного яблока 1145. Датчик источника давления 1110 также измеряет давление ирригационной жидкости в источнике 1105 ирригационной жидкости, находящейся под давлением. Трехходовой клапан 1135 обеспечивает управление включением/выключением ирригации и обусловливает путь к пакету для сбора жидкости 1180. Датчик ирригационного давления 1130 и датчик источника давления 1110 реализованы любым из числа серийно производимых датчиков давления текучей среды. Датчик ирригационного давления 1130 и/или датчик источника давления 1110 представляют информацию о давлении в контроллер (проиллюстрированный на Фиг. 5), который управляет источником 1105 ирригационной жидкости, находящейся под давлением. Источник ирригационной жидкости, находящейся под давлением 1105, регулирует давление и/или скорость потока ирригационной жидкости, которая из него выходит.
В некоторых вариантах реализации настоящего изобретения источник 1105 ирригационной жидкости, находящейся под давлением, содержит эластичный пакет, который содержит ирригационную жидкость. В таком случае является возможным сжатие пакета для создания повышенного давления содержащейся в нем жидкости. К примеру, пакет располагается между двумя противостоящими пластинами, которые сжимаются для создания повышенного давления содержимого пакета (как более подробно описано в соответствии с Фиг. 2). В другом примере эластичная полоса охватывает пакет и натягивается для того, чтобы сжать пакет и создать повышенное давление его содержимого. В других вариантах реализации настоящего изобретения источник 1105 ирригационной жидкости, находящейся под давлением, содержит бутылку или другой контейнер, который может находиться под давлением. В дополнительных вариантах реализации настоящего изобретения источник 1105 ирригационной жидкости, находящейся под давлением, находится под давлением за счет использования насоса или сжатого газа.
Датчик источника давления 1110 может быть единственным датчиком давления или же может быть представлен в виде множества датчиков давления. Датчик источника давления 1110 входит в контакт с источником 1105 ирригационной жидкости, находящейся под давлением, для того, чтобы определить давление его содержимого. К примеру, когда источник 1105 ирригационной жидкости, находящейся под давлением, представляет собой эластичный пакет, расположенный между двумя противостоящими пластинами, датчик источника давления 1110 располагается на одной из пластин, прилегающих к пакету. При перемещении пластин пакет сжимается под давлением, а датчик источника давления 1110 измеряет это давление. В этом случае датчик источника давления 1110 представляет собой множество датчиков, расположенных на пластине или же единственный датчик, расположенный на пластине. В другом примере используется шарнирно сочлененная пластина, как это более подробно описано в соответствии с Фиг. 4.
Фиг. 2 иллюстрирует источник 1105 ирригационной жидкости, находящейся под давлением, представленный в виде эластичного пакета 1109 (к примеру, пакета для внутривенного вливания (IV)), расположенного между двумя противостоящими пластинами 1106 и 1107. Одна из двух пластин 1106 или 1107 является зафиксированной, в то время как другая пластина перемещается для сжатия или сжимает эластичный пакет 1109. К примеру, пластина 1106 является зафиксированной, а пластина 1107 перемещается для того, чтобы сжать эластичный пакет 1109. На Фиг. 3 проиллюстрировано, что пластина 1106 имеет множество датчиков источника давления 1110, расположенных на поверхности, обращенной к эластичному пакету 1109. Таким образом, показания от каждого из четырех проиллюстрированных датчиков источника давления 1110 приводят к более точным показаниям давления. В этом примере показания взяты от каждого из четырех датчиков источника давления 1110, а средняя величина показаний или ошибочные показания отброшены. На Фиг. 4 датчик источника давления 1110 (или множество датчиков) расположен на пластине 1106 под шарнирно сочлененной пластиной 1108. Плоская поверхность шарнирно сочлененной пластины 1108 контактирует с датчиком источника давления 1110. В некоторых случаях поверхность эластичного пакета 1109 может сминаться или иметь складки при сжимании между пластинами 1106 и 1107. Эти морщины или складки приводят к неточным показаниям давления, если морщины или складки находятся около датчика источника давления 1110. Применение множества датчиков, как это проиллюстрировано на Фиг. 3, является одним из способов решения этой проблемы. Использование шарнирно сочлененной пластины 1108 представляет собой другой способ. При применении шарнирно сочлененной пластины 1108 плоская однородная поверхность всегда контактирует с датчиком источника давления 1110.
На Фиг. 5 проиллюстрирована блок-схема, представляющая некоторые составляющие элементы факоэмульсификационной машины. Фиг. 5 иллюстрирует ирригационную магистраль 1140, датчик ирригационного давления 1130 в, вдоль, или соединенный с ирригационной магистралью 1140, аспирационную магистраль 1155, датчик аспирационного давления 1160 в, вдоль, или соединенный с аспирационной магистралью 1155, рукоятку 1150, контроллер 1230, устройство ввода команд для потока 1210 (к примеру, ножная педаль), дисплей 1220 и присоединенное устройство ввода контроллера 1240 для ввода данных или команд для программирования системы.
Ирригационная магистраль 1140 проходит от источника 1105 ирригационной жидкости, находящейся под давлением, до рукоятки 1150 и осуществляет подачу жидкости в рукоятку 1150 для ирригации глазного яблока во время хирургической операции (как проиллюстрировано на Фиг. 1). В одном примере стерильная жидкость представляет собой физиологический раствор, тем не менее могут быть применены другие жидкости. По меньшей мере часть ирригационной магистрали 1140 может быть выполнена из гибкой трубки, а в некоторых вариантах реализации изобретения путь 1140 выполнен из нескольких сегментов, при этом некоторые сегменты являются жесткими, а другие являются гибкими.
Датчик ирригационного давления 1130 соединен с ирригационной магистралью 1140 и выполняет функцию измерения ирригационного давления в ирригационной магистрали 1140. В некоторых вариантах реализации изобретения датчик 1130 представляет собой датчик давления, выполненный с возможностью обнаружения текущих условий давления. Датчик 1130 передает сигналы, показывающие измеренное давление, в контроллер 1230. После получения контроллер 1230 обрабатывает полученные сигналы для того, чтобы определить, является ли измеренное давление выше или ниже желаемого давления или же оно находится в пределах заранее установленного диапазона желаемого давления. Несмотря на то, что указанный датчик описан в качестве датчика давления, датчиком ирригационного давления 1130 может быть другой тип датчика, такой как датчик потока, который обнаруживает фактический расход жидкости, и может содержать дополнительные датчики для мониторинга дополнительных параметров. В некоторых вариантах реализации изобретения датчик 1130 содержит свою собственную функцию обработки, и обработанные данные затем передаются в контроллер 1230.
Аспирационная магистраль 1155 проходит от рукоятки к резервуару для сбора жидкости 1180 (как проиллюстрировано на Фиг. 1). По аспирационной магистрали 1155 удаляют жидкость, которую применяют для промывки глазного яблока, а также любые малейшие эмульгированные частицы.
Датчик аспирационного давления 1160 соединен с аспирационной магистралью 1155 и выполняет функцию измерения давления отводимой текучей среды в аспирационной магистрали 1155. Подобно датчику 1130, описанному выше, датчик 1160 представляет собой датчик давления, выполненный с возможностью обнаружения текущих условий давления. Он передает сигналы, показывающие измеренное давление, в контроллер 1230. Датчиком 1160, подобно датчику 1130, может быть любой подходящий тип датчика, такой как датчик потока, который обнаруживает фактический расход жидкости, и может содержать дополнительные датчики для мониторинга дополнительных параметров.
Рукоятка 1145 представляет собой ультразвуковую рукоятку, которая подает ирригационную жидкость в операционное поле. Рукоятка сконфигурирована, как известно в данной области техники, для того, чтобы принимать и работать с различными иглами или принадлежностями в зависимости от направления практического применения и выполняемых операций. Следует обратить внимание на то обстоятельство, что, хотя рассматривается ультразвуковая рукоятка, принципы настоящего изобретения предназначены для охватывания применения режущих рукояток для витрэктомии или других рукояток, известных в данной области техники. Только лишь для удобства это направление практического применения будет относиться только к рукоятке 1145, признавая факт того, что система работает таким же образом с другими рукоятками.
В проиллюстрированном примере устройством ввода команд для жидкости 1210 является, как правило, ножная педаль. Оно может принимать входные сигналы, указывающие на желаемую скорость потока, желаемое давление или другие характеристики жидкости. Оно выполнено с возможностью управления функциональными параметрами машины за счет применения множества основных параметров управления, в том числе регулирования скорости подачи ирригационной жидкости или давления в каждом из основных параметров управления. В некоторых вариантах реализации изобретения устройством ввода команд для потока является не ножная педаль, а другое устройство ввода, расположенное на машине где-нибудь в другом месте.
Устройство ввода контроллера 1240 позволяет пользователю вводить данные или команды, которые воздействуют на программирование системы. В этом варианте реализации изобретения устройство ввода контроллера 1240 соединено с дисплеем 1220. Тем не менее, оно может быть соединено непосредственно с контроллером способом, известным в данной области техники. К примеру, в некоторых вариантах реализации изобретения устройство ввода контроллера 1240 представляет собой стандартную клавиатуру компьютера, стандартное указывающее устройство, такое как мышь или шаровое устройство ввода графической информации, сенсорный экран или другое устройство ввода.
Как видно из Фиг. 5, контроллер 1230 соединен с дисплеем 1220, устройством ввода команд для потока 1210, рукояткой 1150, датчиком ирригационного давления 1130, датчиком аспирационного давления 1160 и устройством ввода контроллера 1240. Он сконфигурирован или запрограммирован для управления давлением ирригационной системы на основании заранее установленных программ или последовательностей.
При использовании, контроллер 1230 выполнен с возможностью приема сигналов от датчика ирригационного давления 1130 и обработки сигналов для того, чтобы определить, находится ли обнаруженное ирригационное давление за пределами допустимого диапазона, или выше, или ниже допустимых пороговых значений. Если контроллер 1230 обнаруживает недопустимое ирригационное давление, то он регулирует давление ирригационной системы для того, чтобы откорректировать давление до желаемого диапазона. Таким же образом, в еще одном примере, контроллер 1230 выполнен с возможностью приема сигналов от датчика аспирационного давления 1160 и обработки сигналов для того, чтобы определить, находится ли обнаруженное давление за пределами допустимого диапазона, или выше, или ниже допустимых пороговых значений. Если контроллер 1230 обнаруживает недопустимое давление, то он регулирует находящуюся под давлением ирригационную систему для того, чтобы откорректировать давление до желаемого диапазона. Таким образом, датчик ирригационного давления 1130 и/или датчик аспирационного давления 1160 применяют для регулирования давления жидкости в глазном яблоке (ВГД).
Возвращаясь к Фиг. 1, датчик аспирационного давления 1160 измеряет давление в аспирационной магистрали 1155 или аспирационном пути. Датчик аспирационного давления 1160 может быть расположен в любом месте аспирационной магистрали 1155 или аспирационного пути. При варианте расположения в непосредственной близости к глазному яблоку 1145 датчик аспирационного давления располагается в рукоятке 1150. Датчик аспирационного давления 1160 реализован в виде любого из числа серийно производимых датчиков давления текучей среды. Датчик аспирационного давления 1160 представляет информацию о давлении в контроллер (проиллюстрированный на Фиг. 5), который управляет источником 1105 ирригационной жидкости, находящейся под давлением.
Рукоятка 1150 располагается в области глазного яблока 1145 во время операции факоэмульсификации. Рукоятка 1150 имеет полую иглу, которая с помощью ультразвука вибрирует в глазном яблоке для того, чтобы разрушить больной хрусталик. Патрубок, расположенный вокруг иглы, обеспечивает подачу ирригационной жидкости из ирригационной магистрали 1140. Ирригационная жидкость проходит через пространство между наружной поверхностью иглы и внутренней поверхностью патрубка. Жидкость и частицы хрусталика аспирируются через полую иглу. Таким образом, внутренний канал полой иглы выполнен с возможностью соединения по текучей среде с аспирационной магистралью 1155. Насос 1170 отсасывает аспирированную текучую среду из глазного яблока 1145. Датчик аспирационного давления 1160 измеряет давление в аспирационной магистрали. Необязательно может быть применен выпускной клапан для того, чтобы снизить давление вакуума, созданного с помощью насоса 1170. Аспирационная жидкость проходит через резервуар 1175 и далее в пакет для сбора жидкости 1180.
Во время операции факоэмульсификации в тонком конце иглы на рукоятке 1150 может возникнуть закупорка частицами хрусталика. Это создает состояние, которое называется окклюзией. Во время окклюзии, как правило, из глазного яблока аспирируется меньше жидкости, а разрежение в аспирационной магистрали 1155 в результате окклюзии увеличивается. Соответственно, во время окклюзии, датчик аспирационного давления 1160 обнаруживает повышенный вакуум, который присутствует в аспирационной магистрали 1155. При прорыве окклюзии (иными словами, когда частицы хрусталика, которые являются причиной окклюзии, разбиваются с помощью ультразвуковой иглы), возникает постокклюзионная волна. Повышенный вакуум в аспирационной магистрали 1155 приводит к внезапному отсасыванию жидкости из глазного яблока, в результате чего происходит быстрое снижение ВГД и обмеление свободного пространства внутри глазного яблока. Это приводит к опасной ситуации, в которой могут быть повреждены различные структуры глазного яблока.
При прорыве окклюзии датчик аспирационного давления 1160 обнаруживает падение давления в аспирационной магистрали 1155. Таким же образом, датчик ирригационного давления 1130 также обнаруживает падение давления в ирригационной магистрали 1140, которое происходит в результате прорыва окклюзии. Сигналы от датчика ирригационного давления 1130 и/или датчика аспирационного давления 1160 используются контроллером 1230 для управления источником ирригации 1105, как более подробно описано ниже.
Ирригационная система, находящаяся под давлением, в соответствии с настоящим изобретением, выполнена с возможностью реагирования на постокклюзионную волну, вызванную прорывом окклюзии, за счет увеличения ирригационного давления в ирригационной магистрали 1140. При прорыве окклюзии и возникновении постокклюзионной волны источник 1105 ирригационной жидкости, находящейся под давлением, повышает в ответ давление ирригационной жидкости. Увеличение ирригационного давления источником 1105 ирригационной жидкости, находящейся под давлением, соответствует увеличению потребления жидкости, которое вызвано прорывом окклюзии. Таким образом, давление и полученное в результате свободное пространство в глазном яблоке 1145 поддерживается на относительно постоянном уровне, который выбран хирургом.
Точно так же, при возникновении окклюзии, ирригационное давление возрастает в связи с тем, что аспирация жидкости из глазного яблока уменьшается. Увеличение давления ирригационной жидкости, обнаруженное с помощью датчика ирригационного давления 1130, применяют для управления источником 1105 ирригационной жидкости, находящейся под давлением, для регулирования давления в глазном яблоке 1145, иными словами, для того, чтобы поддерживать давление в глазном яблоке 1145 в допустимых пределах. В таком случае датчик аспирационного давления 1160 также обнаруживает наличие окклюзии, и показания от него используются контроллером 1230 для управления источником 1105 ирригации, находящимся под давлением. В этом случае давление в источнике 1105 ирригационной жидкости, находящейся под давлением, не увеличивается, а остается таким же или снижается.
Как правило, управление источником 1105 ирригационной жидкости, находящейся под давлением, осуществляется на основании двух параметров: (1) показаний давления и (2) оценки ирригационного потока через систему (или результатов измерения фактического потока через систему). Показания давления могут поступать от датчика ирригационного давления 1130 (т.е. давление в ирригационной магистрали), датчика аспирационного давления 1160 (т.е. давление в аспирационной магистрали) или датчика источника давления 1110 (т.е. давление в источнике ирригации, находящемся под давлением).
В одном из вариантов реализации настоящего изобретения, управление источником 1105 ирригационной жидкости, находящейся под давлением, осуществляется на основе ирригационного давления и количества протекающей жидкости через систему с учетом корректировки на поправочный коэффициент (как подробно описано ниже). Ирригационное давление применяют для управления при прорыве окклюзии и для поддержания постоянного ВГД. Ирригационный поток также определяет ВГД. Количество протекающей жидкости через систему с учетом корректировки на поправочный коэффициент (что эквивалентно ирригационному потоку) применяют для управления истечением жидкости в области разреза и степенью сжатия в патрубке. В совокупности эти параметры применяют для поддержания постоянного ВГД во время операции.
Подсчитанное количество протекающей жидкости через систему представляет собой, как правило, количество протекающей жидкости от источника 1105 ирригации, находящегося под давлением, через ирригационную магистраль 1140, через рукоятку 1150, в глазное яблоко 1145, из глазного яблока 1145, через рукоятку 1150, через аспирационную магистраль 1155 и в пакет для сбора жидкости 1180. В процессе работы жидкость также теряется из системы в результате утечки из глазного яблока 1145 или раны, через которую вводится игла рукоятки 1150 (также называется "истечение жидкости в области разреза"). Таким образом, общее количество протекающей жидкости в системе является равным количеству жидкости, протекающей через глазное яблоко минус количество жидкости, которая теряется в связи с истечением жидкости в области разреза.
Подсчитанное количество протекающей жидкости основано на нескольких различных расчетах. К примеру, количество протекающей жидкости может быть подсчитано с помощью любого из следующего:
Измерение перепада давления для вычисления количества протекающей жидкости происходит на основании показаний датчика аспирационного давления, плюс импеданс насоса, плюс максимальное значение вакуума, достигаемого с помощью аспирационного насоса. Количество протекающей жидкости рассчитывается по разности между измеренным аспирационным давлением в датчике аспирационного давления 1160, максимальным значением вакуума, который создается с помощью насоса 1170 и импедансом насоса. Импеданс насоса 1170 является известным параметром, а максимальное значение вакуума, который создает насос, измеряется точно, как давление аспирации (с помощью датчика аспирационного давления 1160). Таким образом, количество протекающей жидкости рассчитывается по разности двух давлений в системе циркуляции жидкости и импеданса этой системы циркуляции жидкости. В этом случае два давления представляют собой результат измерения давления с помощью датчика аспирационного давления 1160 и максимального давления, достигаемого с помощью насоса 1170. Импеданс в этом примере представляет собой импеданс насоса 1170.
Измерение перепада давления для вычисления количества протекающей жидкости основано на давлении источника, измеренном на датчике источника давления 1110, давлении ирригации, измеренном на датчике ирригационного давления 1130, и импеданса ирригационной магистрали (или ирригационного пути) от источника ирригации 1105 до датчика ирригационного давления 1130. Количество протекающей жидкости рассчитывается с помощью разности давлений между источником ирригации 1105 и датчиком ирригационного давления 1130, и импеданса ирригационной магистрали 1140 от источника ирригации до датчика ирригационного давления. Таким образом, количество протекающей жидкости рассчитывается по разности двух давлений в системе циркуляции жидкости и импеданса этой системы циркуляции жидкости.
В тех случаях, когда источником 1105 ирригационной жидкости, находящейся под давлением, является эластичный пакет 1109, расположенный между двумя противостоящими пластинами 1106 и 1107 (как проиллюстрировано на Фиг. 2), перемещение пластин 1106 и 1107 соответствует количеству протекающей через систему жидкости. Количество протекающей жидкости и/или объем жидкости, которую применяют в ходе операции, рассчитывают непосредственно от расположения пластин 1106 и 1107. В целом, во время операции, пластины 1106 и 1107 перемещаются в направлении друг к другу для того, чтобы выжимать жидкость за пределы эластичного пакета 1109 с желаемым давлением или скоростью потока жидкости. Общее количество жидкости, которая выходит из эластичного пакета 1109, напрямую связано с расположением противостоящих пластин 1106 и 1107. Чем ближе друг к другу расположены пластины 1106 и 1107, тем большее количество жидкости вышло из эластичного пакета 1109. Таким образом, положение пластин 1106 и 1107 также применяют для указания количества оставшейся в эластичном пакете 1109 жидкости и обеспечения индикации для хирурга уровня жидкости в эластичном пакете 1109 (к примеру, путем отображения уровня жидкости на дисплее 1220).
Фактическое количество протекающей через систему жидкости также зависит от двух разных факторов: истечения жидкости в области разреза и степени сжатия в патрубке. Как было отмечено выше, рукоятка 1150 имеет патрубок, расположенный вокруг иглы. Патрубок обеспечивает подачу ирригационной жидкости из ирригационной магистрали 1140 в глазное яблоко 1145. Ирригационная жидкость проходит через пространство между наружной поверхностью иглы и внутренней поверхностью патрубка. Жидкость и частицы хрусталика аспирируются через полую иглу. Во время операции патрубок и игла вводятся в глазное яблоко через небольшой разрез. Таким образом, патрубок контактирует с тканью глазного яблока в области разреза (или раны). Истечение жидкости в области разреза отображает количество жидкости, которая выходит из глазного яблока через рану (или через пространство между патрубком и тканью глазного яблока, которая формирует рану). Во время операции жидкость выходит из глазного яблока через рану - такие потери жидкости выходят из системы (т.е. жидкость, которая выходит из глазного яблока, не проходит через аспирационную магистраль 1155). Истечение жидкости в области разреза, как правило, приводит к потере небольшого количества жидкости и, таким образом, к уменьшению общего количества протекающей через систему жидкости. В математическом выражении, количество протекающей ирригационной жидкости = количеству протекающей аспирационной жидкости + количество жидкости при истечении в области разреза.
Степень сжатия в патрубке в целом отображает состояние, при котором патрубок зажат или прижат вплотную к игле при введении в разрез. Сжатие патрубка происходит более часто при меньших разрезах и приводит или не приводит в результате к уменьшению истечения жидкости в области разреза. Сжатие патрубка ограничивает количество протекающей через систему жидкости. В связи с тем, что зажатие патрубка увеличивает сопротивление потока жидкости в системе, поток жидкости при сжатии патрубка уменьшается.
Как правило, потери, возникшие в результате истечения жидкости в области разреза и сжатия патрубка, зависят от типа применяемых хирургом иглы и патрубка, а также техники. Профили количества протекающей жидкости для различных комбинаций игл и патрубков определены экспериментально и полученные в результате данные включены в алгоритм или базу данных для применения в управлении источником 1105 ирригационной жидкости, находящейся под давлением. В качестве альтернативы, такие экспериментальные данные объединены для того, чтобы обеспечить широкий диапазон значений различных поправочных коэффициентов (как описано в следующем абзаце). Техника хирургов среди офтальмологов в значительной степени отличается. Во время операции некоторые хирурги могут перемещать иглу таким образом, что создается большая степень сжатия патрубка. Хирурги также предпочитают различные размеры игл и патрубков, а также различные размеры разрезов. Эти специфические факторы хирурга также влияют на истечение жидкости в области разреза и степень сжатия патрубка.
Поправочный коэффициент реализован для того, чтобы компенсировать эти два различных значения переменных, которые приводят к уменьшению количества протекающей через систему жидкости: истечение жидкости в области разреза и степень сжатия патрубка. Истечение жидкости в области разреза компенсировано с рассчитанным коэффициентом величины истечения жидкости в области разреза (который реализован в виде смещения, установленного в виде значения по умолчанию). Степень сжатия патрубка компенсирована при помощи рассчитанного коэффициента сжатия. Коэффициент величины истечения жидкости в области разреза и коэффициент сжатия патрубка образуют вместе поправочный коэффициент. Поправочный коэффициент является регулируемым хирургом. Поправочный коэффициент может быть сдвинут, что делается или для увеличения, или же для уменьшения давления в источнике 1105 ирригационной жидкости, находящейся под давлением. К примеру, поправочный коэффициент представляет собой целое число от нуля до семи (с нулевым значением не может быть никакой компенсации, а значение семь дает максимальную компенсацию).
Количество протекающей ирригационной жидкости рассчитывается, исходя из рассчитанного количества протекающей через систему жидкости с учетом поправочного коэффициента. Затем, количество протекающей ирригационной жидкости, как правило, равняется количеству протекающей аспирационной жидкости плюс количество жидкости при истечении в области разреза. Вследствие этого ирригационное давление рассчитывается, исходя из рассчитанного количества протекающей через систему жидкости с учетом поправочного коэффициента.
Как правило, для того, чтобы компенсировать уменьшение количества протекающей жидкости (или потери) в результате истечения жидкости в области разреза и сжатия патрубка, давление в источнике 1105 ирригационной жидкости, находящейся под давлением, слегка увеличивается. Такое увеличение давления может быть реализовано в алгоритме на основании поправочного коэффициента. В приведенном выше примере хирург выбирает значение параметра поправочного коэффициента три для того, чтобы обеспечить умеренную компенсацию при истечении жидкости в области разреза и сжатии патрубка. В этом примере установка параметра поправочного коэффициента в положение три соответствует небольшому увеличению давления в источнике 1105 ирригационной жидкости, находящейся под давлением. Другими словами, исходный уровень давления в источнике 1105 ирригационной жидкости, находящейся под давлением, слегка увеличивается для того, чтобы компенсировать эти факторы.
В другом примере поправочный коэффициент реализован за счет применения значения смещения по умолчанию, которое может быть отрегулировано с помощью хирурга. Номинальная константа представляет собой значение смещения по умолчанию в алгоритме. Хирург может изменить это значение по умолчанию в некоторое число раз (в диапазоне от нуля без компенсации до 2 для двойной компенсации). Значение смещения по умолчанию определено за счет применения экспериментальных данных, связанных с характеристиками потока жидкости при различных комбинациях игл и патрубков. Некоторые комбинации иглы и патрубка являются гораздо более распространенными, чем другие, поэтому для определения значения смещения по умолчанию были применены наиболее распространенные комбинации. В других примерах для того, чтобы определить значение смещения по умолчанию, применено агрегирование таких данных.
В еще одном примере хирург вводит тип патрубка с иглой через устройство ввода контроллера 1240. В том числе для того, чтобы отсканировать штриховой код с хирургического пакета, который содержит патрубок и иглу, применяют устройство для считывания штрихового кода. Контроллер 1230 при получении информации об игле и патрубке определяет характеристики потока жидкости, связанные с иглой и патрубком (или производит поиск характеристик потока жидкости в базе данных) и выбирает соответствующий поправочный коэффициент. Помимо всего прочего, для выбора правильного поправочного коэффициента могут быть использованы предпочтения врача и/или данные от предыдущих операций. К примеру, могут быть применены параметрические данные от предыдущих операций для того, чтобы определить технику врача и корректировать, изменять или выбирать поправочный коэффициент.
Независимо от того, каким образом определяют поправочный коэффициент, поправочный коэффициент применяют для компенсации потерь потока жидкости. Поправочный коэффициент применяют для управления источником 1105 ирригационной жидкости, находящейся под давлением, таким образом, чтобы обеспечить подачу такого количества жидкости, которое является равным количеству жидкости, потерянной в результате истечения жидкости в области разреза. Поправочный коэффициент применяют для управления источником 1105 ирригационной жидкости, находящейся под давлением, таким образом, чтобы обеспечить небольшое увеличение давления для того, чтобы преодолеть увеличение сопротивления потока, которое вызвано сжатием патрубка. Помимо всего прочего, в связи с тем, что ирригационный поток определяет ВГД, поправочный коэффициент применяют для регулировки ВГД, а также для компенсации потерь потока жидкости.
Вследствие этого управление источником 1105 ирригационной жидкости, находящейся под давлением, осуществляется на основании ирригационного давления и количества протекающей жидкости через систему с учетом корректировки на поправочный коэффициент. Ирригационное давление применяют для управления при прорыве окклюзии и для поддержания относительно постоянного ВГД. Количество протекающей жидкости через систему с учетом корректировки на поправочный коэффициент применяют для компенсации истечения жидкости в области разреза и сжатия в патрубке, а также поддержания относительно постоянного ВГД. В совокупности эти параметры применяют для поддержания относительно постоянного ВГД во время операции.
Определение значения ВГД осуществляется с применением датчика ирригационного давления. Перепад давления между датчиком ирригационного давления и глазным яблоком является известным в силу того, что являются известными характеристики канала, проходящего от датчика ирригационного давления до глазного яблока. К примеру, если датчик ирригационного давления находится в жидкостной кассете, которая подсоединена к рукоятке 1150 через отрезок ирригационной магистрали 1140, то являются известными как импеданс потока в отрезке ирригационной магистрали 1140, так и в ирригационном пути через рукоятку 1150 (или же могут быть измерены). Затем, в таком случае, ВГД определяется по показаниям датчика ирригационного давления. Показания ВГД также зависят от степени сжатия патрубка (в силу того, что патрубок находится на пути ирригации между датчиком ирригационного давления и глазным яблоком) и истечения жидкости в области разреза. Поправочный коэффициент применяют для регулирования ВГД в связи с этими потерями (или изменениями импеданса).
В одном из вариантов реализации настоящего изобретения хирург выбирает желаемый уровень ВГД. Затем источник 1105 ирригационной жидкости, находящейся под давлением, является управляемым для того, чтобы поддерживать желаемое ВГД. В связи с тем, что ВГД находится в зависимости от показаний датчика ирригационного давления, датчик ирригационного давления 1130 применяют для управления источником 1105 ирригационной жидкости, находящейся под давлением. В совокупности, ирригационное давление и количество протекающей жидкости через систему с учетом корректировки на поправочный коэффициент, также применяют для управления источником 1105 ирригационной жидкости, находящейся под давлением. Ирригационный поток также определяет ВГД. Количество протекающей через систему жидкости с учетом корректировки на поправочный коэффициент является эквивалентным ирригационному потоку. При наличии окклюзии (с момента определения датчиком ирригационного давления 1130 или датчиком аспирационного давления 1160), ВГД поддерживается за счет применения такой схемы управления. При прорыве окклюзии (с момента обнаружения за счет применения датчика ирригационного давления 1130 или датчика аспирационного давления 1160), источник 1105 ирригационной жидкости, находящейся под давлением, регулирует поддержку относительно постоянного ВГД.
В качестве альтернативы, в вышеприведенной схеме управления вместо датчика ирригационного давления 1130 могут быть применены датчик источника давления 1110 или датчик аспирационного давления 1160.
Управление источником 1105 ирригационной жидкости, находящейся под давлением, также описано в трех различных состояниях: устойчивом режиме работы (в тех случаях, когда отсутствует окклюзия иглы и количество протекающей через систему жидкости является относительно постоянным); состоянии окклюзии (в тех случаях, когда происходит окклюзия иглы, а количество протекающей через систему жидкости является недостаточным или отсутствует); и при прорыве окклюзии или постокклюзионной волне (в тех случаях, когда происходит внезапное и быстрое поступление потока жидкости через систему). Описаны примеры каждого состояния.
К примеру, при устойчивом режиме работы источник 1105 ирригационной жидкости, находящейся под давлением, является управляемым для того, чтобы поддерживать выбранное ВГД. Определение значения ВГД осуществляется с применением датчика ирригационного давления 1130. Показания давления от датчика ирригационного давления 1130 принимаются с помощью контроллера 1230. Желаемое значение ВГД также принимается с помощью контроллера 1230. Контроллер управляет работой источника 1105 ирригационной жидкости, находящейся под давлением, таким образом, чтобы поддерживать желаемое значение ВГД. При устойчивом режиме работы контроллер, как правило, управляет источником 1105 ирригационной жидкости, находящейся под давлением, для обеспечения подачи жидкости при относительно постоянном давлении для того, чтобы поддерживать ВГД. Помимо всего прочего, контроллер вычисляет расчетную величину количества протекающей жидкости с корректировкой за счет поправочного коэффициента. В этом примере, при устойчивом режиме работы, количество протекающей жидкости определяется путем измерения перепадов давления или перемещения пластин. В случае измерения перепадов давления, контроллер 1230 принимает показания давления, необходимые для измерения перепадов давления, и производит вычисления. В случае перемещения пластины контроллер 1230 принимает показания от датчиков положения или им подобных и определяет перемещение пластины. Поправочный коэффициент также принимается с помощью контроллера (в виде входных данных от хирурга, к примеру). В связи с тем, что поток ирригационной жидкости (расчетное количество протекающей через систему жидкости с корректировкой за счет поправочного коэффициента) связан с ВГД, контроллер 1230 управляет работой источника 1105 ирригационной жидкости, находящейся под давлением, для того, чтобы поддерживать скорость потока жидкости в соответствии с желаемой величиной ВГД. Конечным результатом является то, что поправочный коэффициент применяют для регулировки давления жидкости в источнике 1105 ирригационной жидкости, находящейся под давлением, для компенсации потерь потока жидкости.
При возникновении окклюзии тонкий конец иглы является полностью или частично закупоренным частицами хрусталика. При состоянии окклюзии количество протекающей через систему жидкости уменьшается. Определение значения ВГД осуществляется с применением датчика ирригационного давления 1130. Показания давления от датчика ирригационного давления 1130 принимаются с помощью контроллера 1230. Желаемое значение ВГД также принимается с помощью контроллера 1230. Контроллер управляет работой источника 1105 ирригационной жидкости, находящейся под давлением, таким образом, чтобы поддерживать желаемое значение ВГД. При состоянии окклюзии контроллер, как правило, управляет источником 1105 ирригационной жидкости, находящейся под давлением, для обеспечения подачи жидкости при относительно постоянном давлении для того, чтобы поддерживать ВГД. Поддержание давления в состоянии окклюзии означает, что пластины 1106 и 1107 поддерживают эластичный пакет 1109 при относительно постоянном давлении. Помимо всего прочего, контроллер вычисляет расчетную величину количества протекающей жидкости с корректировкой за счет поправочного коэффициента, как подробно описано выше. В связи с тем, что поток ирригационной жидкости (расчетное количество протекающей через систему жидкости с корректировкой за счет поправочного коэффициента) связан с ВГД, контроллер 1230 управляет работой источника 1105 ирригационной жидкости, находящейся под давлением, для того, чтобы поддерживать скорость потока жидкости в соответствии с желаемой величиной ВГД. Конечным результатом является то, что поправочный коэффициент используется для регулировки давления жидкости в источнике 1105 ирригационной жидкости, находящейся под давлением, для компенсации потерь потока жидкости (к примеру, при истечении жидкости в области разреза).
При прорыве окклюзии частицы хрусталика в тонком конце иглы удаляются, и возникает постокклюзионная волна жидкости в глазном яблоке, проходящая через просвет иглы. Во время прорыва окклюзии количество протекающей через систему жидкости увеличивается. Определение значения ВГД осуществляется с применением датчика ирригационного давления 1130. Показания давления от датчика ирригационного давления 1130 принимаются с помощью контроллера 1230. Желаемое значение ВГД также принимается с помощью контроллера 1230. Контроллер управляет работой источника 1105 ирригационной жидкости, находящейся под давлением, таким образом, чтобы поддерживать желаемое значение ВГД. Во время прорыва окклюзии контроллер, как правило, управляет источником 1105 ирригационной жидкости, находящейся под давлением, для обеспечения подачи жидкости при повышенном давлении для того, чтобы поддерживать ВГД. Поддержание давления во время прорыва окклюзии означает, что пластины 1106 и 1107 прикладывают усилие к эластичному пакету 1109 для повышения давления в ирригационной магистрали таким образом, чтобы обеспечить необходимое количество протекающей жидкости для удовлетворения потребности в жидкости при постокклюзионной волне. Помимо всего прочего, контроллер вычисляет расчетную величину количества протекающей жидкости с корректировкой за счет поправочного коэффициента, как подробно описано выше. В связи с тем, что поток ирригационной жидкости (расчетное количество протекающей через систему жидкости с корректировкой за счет поправочного коэффициента) связан с ВГД, контроллер 1230 управляет работой источника 1105 ирригационной жидкости, находящейся под давлением, для того, чтобы поддерживать скорость потока жидкости в соответствии с желаемой величиной ВГД. Конечным результатом является то, что поправочный коэффициент применяют для регулировки давления жидкости в источнике 1105 ирригационной жидкости, находящейся под давлением, для компенсации потерь потока жидкости (к примеру, при истечении жидкости в области разреза).
В еще одном варианте реализации изобретения настоящего изобретения истечение жидкости в области разреза определено как разность между количеством ирригационной жидкости и количеством аспирационной жидкости. Количество ирригационной жидкости измеряется непосредственно датчиком потока и может быть вычислено с применением измерения перепадов давления или же может быть рассчитано на основании перемещения пластины. Показания датчика источника давления 1110 и датчика ирригационного давления 1130 применяют для измерения перепадов давления. В этом случае импеданс потока жидкости между датчиком источника давления 1110 и датчиком ирригационного давления 1130 является известным (или может быть измерен). Вычисляется разность показаний давления, измеренного датчиком источника давления 1110 и датчиком ирригационного давления 1130, и определяется количество протекающей жидкости. В случае перемещения пластины количество протекающей жидкости определяется в зависимости от положения и/или перемещения пластин 1106 и 1107.
Количество аспирационной жидкости также измеряется с применением измерения перепадов давления. Количество протекающей жидкости рассчитывается по разности между измеренным аспирационным давлением в датчике аспирационного давления 1160, максимальным значением вакуума, который создается с помощью насоса 1170, и импедансом насоса. Импеданс насоса 1170 является известным параметром, а максимальное значение вакуума, который создает насос, измеряется точно, как давление аспирации (с помощью датчика аспирационного давления 1160). Таким образом, количество протекающей жидкости рассчитывается по разности двух давлений в системе циркуляции жидкости и импеданса этой системы циркуляции жидкости. В этом случае два давления представляют собой результат измерения давления с помощью датчика аспирационного давления 1160 и максимального давления, достигаемого с помощью насоса 1170. Импеданс в этом примере представляет собой импеданс насоса 1170.
Применяя вычисленные значения для количества протекающей ирригационной жидкости и количества протекающей аспирационной жидкости, можно найти количество жидкости при истечении в области разреза как разность между количеством протекающей ирригационной жидкости и количеством протекающей аспирационной жидкости. Это вычисление количества жидкости при истечении в области разреза применяют для более точного определения поправочного коэффициента. В одном варианте реализации настоящего изобретения поправочный коэффициент определяется динамически частично на основании вычисленного количества жидкости при истечении в области разреза.
В конечном счете, следует отметить, что положение пластин 1106 и 1107 применяют для отображения объема жидкости, используемой во время операции, оставшейся в эластичном мешке 1109. Как было отмечено выше, взаимное расположение противостоящих пластин 1106 и 1107 указывает на объем жидкости, который вышел из эластичного пакета 1109. В некоторых случаях, если имеющийся эластичный пакет 1109 содержит мало жидкости, то в источник 1105 ирригационной жидкости, находящейся под давлением, должен быть установлен новый пакет с ирригационной жидкостью. В связи с тем, что взаимное расположение противостоящих пластин 1106 и 1107 указывает на объем использованной жидкости, а также в связи с тем, что общий объем жидкости в эластичном пакете 1109 является известным, эти два параметра применяют для того, чтобы обеспечить индикацию для хирурга уровня жидкости в эластичном пакете 1109 (к примеру, путем отображения уровня жидкости на дисплее 1220). При низком уровне жидкости для хирурга подается предупреждающий сигнал для того, чтобы установить новый эластичный пакет 1109 с жидкостью в источник 1105 ирригационной жидкости, находящейся под давлением.
Исходя из вышеизложенного, является понятным, что настоящее изобретение представляет усовершенствованную факоэмульсификационную систему. Настоящее изобретение обеспечивает активное управление давлением в глазном яблоке во время хирургической операции. Настоящее изобретение проиллюстрировано в настоящем документе в качестве примера, и специалистом в данной области техники могут быть сделаны различные модификации.
Другие варианты реализации изобретения будут очевидны для специалистов в данной области техники из рассмотрения подробного описания и практического применения изобретения, раскрытого в настоящем документе. Предполагается, что подробное описание и примеры следует рассматривать только как приводимые в качестве примера, а истинный объем и сущность изобретения указаны в следующей формуле изобретения.
Группа изобретений относится к медицине. Хирургическая система, содержащая: источник находящейся под давлением ирригационной жидкости; ирригационную магистраль, выполненную с возможностью жидкостного соединения с источником находящейся под давлением ирригационной жидкости; рукоятку, выполненную с возможностью жидкостного соединения с ирригационной магистралью, причем рукоятка имеет ирригационный патрубок; датчик ирригационного давления, расположенный внутри или вдоль источника находящейся под давлением ирригационной жидкости либо внутри или вдоль ирригационной магистрали; и контроллер для управления источником находящейся под давлением ирригационной жидкости. При этом контроллер выполнен с возможностью управления источником находящейся под давлением ирригационной жидкости на основании показаний датчика ирригационного давления и расчетной величины количества протекающей жидкости с корректировкой за счет поправочного коэффициента. Причем поправочный коэффициент основан на степени сжатия ирригационного патрубка, ограничивающего количество протекающей ирригационной жидкости. Другой вариант хирургической системы содержит: источник находящейся под давлением ирригационной жидкости, при этом источник находящейся под давлением ирригационной жидкости содержит эластичный пакет, расположенный между двумя противостоящими пластинами, причем эластичный пакет содержит жидкость; датчик положения, расположенный в или на одной из двух противостоящих пластин, при этом датчик положения предназначен для определения расстояния между двумя противостоящими пластинами; привод для перемещения по меньшей мере одной из двух противостоящих пластин с возможностью сдавливания эластичного пакета; и контроллер для управления относительным перемещением противостоящих пластин. При этом контроллер принимает показания датчика положения, определяет расстояние между пластинами и обеспечивает оценку количества жидкости в эластичном пакете. Применение данной группы изобретений позволит поддержать стабильное внутриглазное давление при различных параметрах потока жидкости. 2 н. и 23 з.п. ф-лы, 5 ил.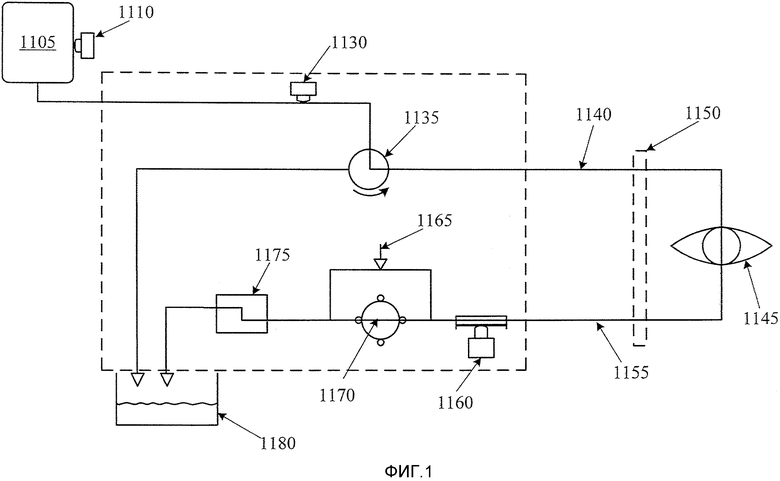
1. Хирургическая система, содержащая:
источник находящейся под давлением ирригационной жидкости;
ирригационную магистраль, выполненную с возможностью жидкостного соединения с источником находящейся под давлением ирригационной жидкости;
рукоятку, выполненную с возможностью жидкостного соединения с ирригационной магистралью, причем рукоятка имеет ирригационный патрубок;
датчик ирригационного давления, расположенный внутри или вдоль источника находящейся под давлением ирригационной жидкости либо внутри или вдоль ирригационной магистрали; и
контроллер для управления источником находящейся под давлением ирригационной жидкости,
при этом контроллер выполнен с возможностью управления источником находящейся под давлением ирригационной жидкости на основании показаний датчика ирригационного давления и расчетной величины количества протекающей жидкости с корректировкой за счет поправочного коэффициента, причем поправочный коэффициент основан на степени сжатия ирригационного патрубка, ограничивающего количество протекающей ирригационной жидкости.
2. Хирургическая система по п. 1, отличающаяся тем, что поправочный коэффициент дополнительно основывается на количестве жидкости, истекающей в области разреза.
3. Хирургическая система по п. 1, дополнительно содержащая:
дисплей; и
устройство ввода контроллера.
4. Хирургическая система по п. 3, отличающаяся тем, что устройство ввода контроллера принимает желаемое значение внутриглазного давления, а контроллер управляет источником находящейся под давлением ирригационной жидкости таким образом, чтобы поддерживать желаемое значение внутриглазного давления.
5. Хирургическая система по п. 3, отличающаяся тем, что устройство ввода контроллера выполнено с возможностью принимать желаемый диапазон значений внутриглазного давления, а контроллер выполнен с возможностью управлять источником находящейся под давлением ирригационной жидкости таким образом, чтобы поддерживать желаемый диапазон значений внутриглазного давления.
6. Хирургическая система по п. 1, отличающаяся тем, что контроллер выполнен с возможностью исчислять значения внутриглазного давления на основании показаний датчика ирригационного давления.
7. Хирургическая система по п. 1, отличающаяся тем, что контроллер выполнен с возможностью исчислять значения внутриглазного давления на основании расчетной величины количества протекающей жидкости с корректировкой за счет поправочного коэффициента.
8. Хирургическая система по п. 1, дополнительно содержащая:
аспирационную магистраль, выполненную с возможностью жидкостного соединения с рукояткой;
датчик аспирационного давления, расположенный внутри или вдоль аспирационной магистрали; и
аспирационный насос, выполненный с возможностью отсасывания жидкости через аспирационную магистраль.
9. Хирургическая система по п. 8, отличающаяся тем, что контроллер выполнен с возможностью исчислять расчетную величину количества протекающей жидкости на основании показаний, полученных от датчика аспирационного давления, максимально достижимой всасывающей способности аспирационного насоса и импеданса аспирационного насоса.
10. Хирургическая система по п. 1, дополнительно содержащая датчик давления источника для измерения давления источника находящейся под давлением ирригационной жидкости.
11. Хирургическая система по п. 10, отличающаяся тем, что контроллер выполнен с возможностью исчислять расчетную величину количества протекающей жидкости на основании показаний, полученных от датчика ирригационного давления, датчика давления источника и импеданса ирригационной магистрали.
12. Хирургическая система по п. 1, отличающаяся тем, что источник находящейся под давлением ирригационной жидкости содержит:
эластичный пакет с жидкостью; и
две противостоящие пластины;
при этом эластичный пакет расположен между двумя противостоящими пластинами.
13. Хирургическая система по п. 12, отличающаяся тем, что контроллер выполнен с возможностью исчислять расчетную величину количества протекающей жидкости на основании перемещения или передвижения двух противостоящих пластин.
14. Хирургическая система по п. 3, отличающаяся тем, что устройство ввода контроллера выполнено с возможностью принимать поправочный коэффициент от пользователя.
15. Хирургическая система по п. 3, отличающаяся тем, что устройство ввода контроллера выполнено с возможностью принимать информацию о выбранной для операции игле и ирригационном патрубке, и эта информация об игле и ирригационном патрубке используется в контроллере для выбора или исчисления поправочного коэффициента.
16. Хирургическая система по п. 15, отличающаяся тем, что контроллер выполнен с возможностью производить выбор или исчисление поправочного коэффициента на основании характеристик потока жидкости при сочетании иглы и ирригационного патрубка.
17. Хирургическая система по п. 10, отличающаяся тем, что контроллер выполнен с возможностью исчислять значения внутриглазного давления на основании показаний датчика давления источника.
18. Хирургическая система по п. 8, отличающаяся тем, что контроллер использует показания датчика аспирационного давления для установления наличия закупорки или прорыва закупорки.
19. Хирургическая система по п. 1, отличающаяся тем, что контроллер использует показания датчика ирригационного давления для установления наличия закупорки или прорыва закупорки.
20. Хирургическая система по п. 19, отличающаяся тем, что контроллер выполнен с возможностью управлять источником находящейся под давлением ирригационной жидкости с тем, чтобы принимать в расчет изменения в потоке жидкости, возникающие вследствие закупорки или прорыва закупорки.
21. Хирургическая система, содержащая:
источник находящейся под давлением ирригационной жидкости, при этом источник находящейся под давлением ирригационной жидкости содержит эластичный пакет, расположенный между двумя противостоящими пластинами, причем эластичный пакет содержит жидкость;
датчик положения, расположенный в или на одной из двух противостоящих пластин, при этом датчик положения предназначен для определения расстояния между двумя противостоящими пластинами;
привод для перемещения по меньшей мере одной из двух противостоящих пластин с возможностью сдавливания эластичного пакета; и
контроллер для управления относительным перемещением противостоящих пластин;
при этом контроллер принимает показания датчика положения, определяет расстояние между пластинами и обеспечивает оценку количества жидкости в эластичном пакете.
22. Хирургическая система по п. 21, дополнительно содержащая дисплей.
23. Хирургическая система по п. 22, отличающаяся тем, что показатели количества жидкости в эластичном пакете отображаются на дисплее.
24. Хирургическая система по п. 22, отличающаяся тем, что показатели низкого уровня жидкости отображаются на дисплее.
25. Хирургическая система по п. 21, отличающаяся тем, что контроллер выполнен с возможностью инициировать предупреждающий сигнал при низком значении количества жидкости в эластичном пакете.
| WO 2002017833 A1, 07.03.2002 | |||
| US 20100145302 A1, 10.06.2010 | |||
| US 20110295191 A1, 01.12.2011 | |||
| US 20100280435 A1, 04.11.2010 | |||
| US 5232439 A1, 03.08.1993 | |||
| US 20080125697 A1, 29.05.2008 | |||
| АСПИРАЦИОННЫЙ НАСОС ДЛЯ ОФТАЛЬМОХИРУРГИЧЕСКИХ СИСТЕМ | 2010 |
|
RU2434608C1 |
| Дебаланс для вибрационных машин | 1957 |
|
SU112035A1 |
| RU 2011152000 A, 27.06.2013. | |||

