Область техники
[0001] Представленное изобретение относится к самоходному транспортному средству. В частности, изобретение относится к самоходному транспортному средству, содержащему раму корпуса транспортного средства, по меньшей мере пару из правого и левого движущих устройств, и устройство подвески, которое подвешивает пару из правого и левого движущих устройств на раме корпуса транспортного средства.
Уровень техники
[0002] В настоящее время движущее устройство гусеничного типа, способное осуществлять стабильную операцию передвижения, используют на рабочем транспортном средстве, движущемся по мягкой земле или неровной земле, такой как склон. При этом известна технология, которая улучшает эффективность контакта с землей гусеничного движущего устройства за счет соединения пары из правого и левого гусеничных движущих устройств друг с другом посредством балансирной балки и подвешивания балансирной балки на раме корпуса транспортного средства с возможностью поворота относительно продольного направления, служащего в качестве оси, таким образом, чтобы гусеничное движущее устройство двигалось, следуя по склону земли в горизонтальном направлении (например, Патентная литература 1). Кроме того, известна технология, в которой нижняя часть рамы шасси, оборудованная с возможностью поворота верхним поворотным корпусом, содержащим рабочий инструмент, и кабина снабжены четырьмя телескопическими рычагами, каждый из которых имеет ходовое гусеничное движущее устройство, предоставленное на его нижнем конце, причем четыре телескопических рычага движутся телескопическим образом, следуя за неровным участком неровной земли таким образом, чтобы верхний поворотный корпус удерживался горизонтально (например, Патентная литература 2).
Патентная литература
[0003] Патентная литература 1: JP H11-291960 A
Патентная литература 2: JP 2000-335457 A
Техническая проблема
[0004] Однако, в Патентной литературе 1, когда транспортное средство движется по склону, эффективность контакта с землей гусеничного движущего устройства является недостаточной, высокой является возможность вызвать риск, такой как боковое скольжение и переворот, а удобство управления или эффективность передвижения в некоторых случаях может ухудшаться. Кроме того, в Патентной литературе 2, поскольку четыре телескопических рычага движутся телескопическим образом, чтобы следовать за неровным участком неровной земли, операция является сложной. Кроме того, поскольку гусеничное движущее устройство следует по неровному участку неровной земли медленно, удобство управления или эффективность передвижения может ухудшаться.
[0005] В данном случае, цель изобретения состоит в том, чтобы создать самоходное транспортное средство, способное осуществлять стабильную операцию передвижения по неровной земле с неровным участком или склоном и улучшая эффективность передвижения.
Решение проблемы
[0006] Соответственно, самоходное транспортное средство представленного изобретения содержит: раму корпуса транспортного средства; пару из правого и левого передних гусеничных движущих устройств; пару из правого и левого задних гусеничных движущих устройств; переднее устройство подвески, которое подвешивает пару из правого и левого передних гусеничных движущих устройств на раме корпуса транспортного средства; и заднее устройство подвески, которое подвешивает пару из правого и левого задних гусеничных движущих устройств на раме корпуса транспортного средства, при этом переднее устройство подвески в виде единого целого подвешивает пару из правого и левого передних гусеничных движущих устройств на раме корпуса транспортного средства и предоставляет возможность колебания или подъема пары из правого и левого передних гусеничных движущих устройств в вертикальном направлении относительно рамы корпуса транспортного средства.
[0007] Кроме того, переднее устройство подвески содержит: качающуюся опорную часть, которую поддерживает рама корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, вращающийся рычаг, который проходит в горизонтальном направлении и поддерживается качающейся опорной частью с возможностью поворота в центре вращающегося рычага в горизонтальном направлении, правый качающийся рычаг, который поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и имеет конец, соединенный с правым передним гусеничным движущим устройством, левый качающийся рычаг, который поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и имеет конец, соединенный с левым передним гусеничным движущим устройством, правый соединительный рычаг, который имеет один конец, соединенный с правым концом вращающегося рычага, и другой конец, соединенный с правым качающимся рычагом, и левый соединительный рычаг, который имеет один конец, соединенный с левым концом вращающегося рычага, и другой конец, соединенный с левым качающимся рычагом, и при этом самоходное транспортное средство дополнительно содержит амортизирующий механизм, который предоставлен между рамой корпуса транспортного средства и качающейся опорной частью.
[0008] Кроме того, переднее устройство подвески содержит: раму тележки, которая поддерживается рамой корпуса транспортного средства с возможностью поворота вокруг вала рулевого управления, служащего в качестве оси и предоставленного в вертикальном направлении, и пару из правого и левого соединительных механизмов, которая соединяет, соответственно, пару из правого и левого передних гусеничных движущих устройств с правой и левой сторонами рамы тележки, и при этом пара из правого и левого соединительных механизмов предоставляет возможность подъема пары из правого и левого передних гусеничных движущих устройств в направлении вала рулевого управления.
[0009] Кроме того, переднее устройство подвески содержит: раму тележки, которая поддерживается рамой корпуса транспортного средства с возможностью поворота вокруг вала рулевого управления, служащего в качестве оси и предоставленного в вертикальном направлении, пару из правого и левого соединительных механизмов, которая соединяет, соответственно, пару из правого и левого передних гусеничных движущих устройств с правой и левой сторонами рамы тележки с возможностью подъема в направлении вала рулевого управления, и подъемное устройство, которое поднимает переднее гусеничное движущее устройство.
[0010] Кроме того, переднее устройство подвески содержит: вращающийся рычаг, который проходит в горизонтальном направлении и поддерживается рамой корпуса транспортного средства с возможностью поворота в центре вращающегося рычага в горизонтальном направлении, правый качающийся рычаг, который поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и имеет конец, соединенный с правым передним гусеничным движущим устройством, левый качающийся рычаг, который поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и имеет конец, соединенный с левым передним гусеничным движущим устройством, правый соединительный рычаг, который имеет один конец, соединенный с правым концом вращающегося рычага, и другой конец, соединенный с правым качающимся рычагом, и левый соединительный рычаг, который имеет один конец, соединенный с левым концом вращающегося рычага, и другой конец, соединенный с левым качающимся рычагом.
Предпочтительные результаты изобретения
[0011] Согласно самоходному транспортному средству изобретения, поскольку самоходное транспортное средство содержит: раму корпуса транспортного средства, пару из правого и левого передних гусеничных движущих устройств, пару из правого и левого задних гусеничных движущих устройств, переднее устройство подвески, которое подвешивает пару из правого и левого передних гусеничных движущих устройств на раме корпуса транспортного средства, и заднее устройство подвески, которое подвешивает пару из правого и левого задних гусеничных движущих устройств на раме корпуса транспортного средства, при этом переднее устройство подвески в виде единого целого подвешивает пару из правого и левого передних гусеничных движущих устройств на раме корпуса транспортного средства и предоставляет возможность колебания или подъема пары из правого и левого передних гусеничных движущих устройств в вертикальном направлении относительно рамы корпуса транспортного средства, можно предоставить самоходное транспортное средство, которое может устойчиво двигаться по неровной земле с неровным участком или склоном и обладает улучшенной эффективностью передвижения. Кроме того, конфигурация является простой, количество составных элементов уменьшено, а производительность или технологичность технического обслуживания являются удовлетворительными.
[0012] Кроме того, переднее устройство подвески содержит: качающуюся опорную часть, которую поддерживает рама корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, вращающийся рычаг, который проходит в горизонтальном направлении и поддерживается качающейся опорной частью с возможностью поворота в центре вращающегося рычага в горизонтальном направлении, правый качающийся рычаг, который поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и имеет конец, соединенный с правым передним гусеничным движущим устройством, левый качающийся рычаг, который поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и имеет конец, соединенный с левым передним гусеничным движущим устройством, правый соединительный рычаг, который имеет один конец, соединенный с правым концом вращающегося рычага, и другой конец, соединенный с правым качающимся рычагом, и левый соединительный рычаг, который имеет один конец, соединенный с левым концом вращающегося рычага, и другой конец, соединенный с левым качающимся рычагом, и при этом самоходное транспортное средство дополнительно содержит амортизирующий механизм, который предоставлен между рамой корпуса транспортного средства и качающейся опорной частью. Согласно данной конфигурации, поскольку правое и левое передние гусеничные движущие устройства быстро следуют уклону склона или изменению неровного участка неровной земли в вертикальном направлении, улучшается эффективность передвижения, удобство управления или комфорт во время движения по неровной земле с неровным участком. Кроме того, поскольку можно уменьшить боковое скольжение правого и левого передних гусеничных движущих устройств, когда транспортное средство движется по склону, улучшается эффективность передвижения, когда транспортное средство движется по склону. Кроме того, поскольку можно устранить столкновение между рамой корпуса транспортного средства, правым передним гусеничным движущим устройством и левым передним гусеничным движущим устройством, правое переднее гусеничное движущее устройство и левое переднее гусеничное движущее устройство устойчиво контактируют с землей и, таким образом, улучшается эффективность передвижения или комфорт во время движения. Таким образом, можно предоставить самоходное транспортное средство, которое может устойчиво двигаться по неровной земле с неровным участком или склоном и обладает улучшенной эффективностью передвижения.
[0013] Кроме того, переднее устройство подвески содержит: раму тележки, которая поддерживается рамой корпуса транспортного средства с возможностью поворота вокруг вала рулевого управления, служащего в качестве оси и предоставленного в вертикальном направлении, и пару из правого и левого соединительных механизмов, которая соединяет, соответственно, пару из правого и левого передних гусеничных движущих устройств с правой и левой сторонами рамы тележки, при этом пара из правого и левого соединительных механизмов предоставляет возможность подъема пары из правого и левого передних гусеничных движущих устройств в направлении вала рулевого управления. Согласно данной конфигурации эффективность передвижения для неровной земли с неровным участком является удовлетворительной. Кроме того, поскольку, когда транспортное средство движется поперек склона, можно уменьшить боковое скольжение правого и левого передних гусеничных движущих устройств, улучшается эффективность передвижения, когда транспортное средство движется поперек склона. Кроме того, эффективность передвижения улучшается, поскольку можно легко выполнять операцию передвижения с поворотом по неровной земле с неровным участком или склоном. Кроме того, поскольку можно сократить полную длину транспортного средства, дополнительно улучшается эффективность передвижения. Таким образом, можно предоставить самоходное транспортное средство, которое может устойчиво двигаться по неровной земле с неровным участком или склоном и обладает улучшенной эффективностью передвижения.
[0014] Кроме того, переднее устройство подвески содержит: раму тележки, которая поддерживается рамой корпуса транспортного средства с возможностью поворота вокруг вала рулевого управления, служащего в качестве оси и предоставленного в вертикальном направлении, пару из правого и левого соединительных механизмов, которая соединяет, соответственно, пару из правого и левого передних гусеничных движущих устройств с правой и левой сторонами рамы тележки с возможностью подъема в направлении вала рулевого управления, и подъемное устройство, которое поднимает переднее гусеничное движущее устройство. Согласно данной конфигурации эффективность передвижения для неровной земли с неровным участком является удовлетворительной. Кроме того, поскольку, когда транспортное средство движется поперек склона, можно уменьшить боковое скольжение правого и левого передних гусеничных движущих устройств, улучшается эффективность передвижения, когда транспортное средство движется поперек склона. Кроме того, эффективность передвижения улучшается, поскольку можно легко выполнять операцию передвижения с поворотом по неровной земле с неровным участком или склоном. Кроме того, эффективность передвижения дополнительно улучшается, поскольку можно поднимать правое и левое передние гусеничные движущие устройства, чтобы следовать наклону склона или неровному участку неровной земли. Таким образом, можно предоставить самоходное транспортное средство, которое выполняет стабильную операцию передвижения по неровной земле с неровным участком или склоном и обладает улучшенной эффективностью передвижения.
[0015] Кроме того, переднее устройство подвески содержит: вращающийся рычаг, который проходит в горизонтальном направлении и поддерживается рамой корпуса транспортного средства с возможностью поворота в центре вращающегося рычага в горизонтальном направлении, правый качающийся рычаг, который поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и имеет конец, соединенный с правым передним гусеничным движущим устройством, левый качающийся рычаг, который поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и имеет конец, соединенный с левым передним гусеничным движущим устройством, правый соединительный рычаг, который имеет один конец, соединенный с правым концом вращающегося рычага, и другой конец, соединенный с правым качающимся рычагом, и левый соединительный рычаг, который имеет один конец, соединенный с левым концом вращающегося рычага, и другой конец, соединенный с левым качающимся рычагом. Согласно данной конфигурации, поскольку правое и левое передние гусеничные движущие устройства быстро следуют уклону склона или изменению неровного участка неровной земли в вертикальном направлении, улучшается эффективность передвижения, удобство управления или комфорт во время движения по неровной земле с неровным участком. Кроме того, поскольку, когда транспортное средство движется по склону, можно уменьшить боковое скольжение правого и левого передних гусеничных движущих устройств, улучшается эффективность передвижения, когда транспортное средство движется по склону. Таким образом, можно предоставить самоходное транспортное средство, которое может устойчиво выполнять операцию передвижения по неровной земле с неровным участком или склоном и обладает улучшенной эффективностью передвижения.
Краткое описание чертежей
[0016] Фиг. 1 представляет собой вид сбоку справа, иллюстрирующий самоходное транспортное средство, которое является примером варианта осуществления изобретения.
Фиг. 2 представляет собой вид сбоку справа, иллюстрирующий раму корпуса транспортного средства.
Фиг. 3 представляет собой вид в перспективе, иллюстрирующий раму корпуса транспортного средства.
Фиг. 4 представляет собой вид сбоку справа, иллюстрирующий переднее гусеничное движущее устройство.
Фиг. 5 представляет собой частично увеличенное изображение в поперечном разрезе, иллюстрирующее переднее гусеничное движущее устройство.
Фиг. 6 представляет собой частично увеличенное изображение в поперечном разрезе, иллюстрирующее переднее гусеничное движущее устройство.
Фиг. 7 представляет собой вид сбоку справа, иллюстрирующий заднее гусеничное движущее устройство.
Фиг. 8 представляет собой частично увеличенное изображение в поперечном разрезе, иллюстрирующее заднее гусеничное движущее устройство.
Фиг. 9 представляет собой вид сбоку справа, иллюстрирующий переднее устройство подвески.
Фиг. 10 представляет собой изображение в направлении X с Фиг. 9.
Фиг. 11 представляет собой вид в перспективе, иллюстрирующий переднее устройство подвески.
Фиг. 12 представляет собой вид сбоку справа, иллюстрирующий заднее устройство подвески.
Фиг. 13 представляет собой изображение в направлении XIII с Фиг. 12.
Фиг. 14 представляет собой вид сбоку справа, иллюстрирующий рабочее состояние переднего устройства подвески.
Фиг. 15 представляет собой изображение в направлении XV с Фиг. 14.
Фиг. 16 представляет собой блок-схему конфигурации, иллюстрирующую пример конфигурации контроллера.
Фиг. 17 представляет собой вид сбоку справа, иллюстрирующий пример самоходного транспортного средства согласно еще одному варианту осуществления.
Фиг. 18 представляет собой вид сбоку справа, иллюстрирующий раму корпуса самоходного транспортного средства с Фиг. 17.
Фиг. 19 представляет собой вид в перспективе, иллюстрирующий раму корпуса транспортного средства с Фиг. 18.
Фиг. 20 представляет собой вид сбоку справа, иллюстрирующий переднее устройство подвески.
Фиг. 21 представляет собой изображение в направлении XXI с Фиг. 20.
Фиг. 22 представляет собой вид в перспективе, иллюстрирующий переднее устройство подвески.
Фиг. 23 представляет собой вид сбоку справа, иллюстрирующий заднее устройство подвески.
Фиг. 24 представляет собой изображение в направлении XXIV с Фиг. 23.
Фиг. 25 представляет собой вид сбоку справа, иллюстрирующий рабочее состояние переднего устройства подвески.
Фиг. 26 представляет собой изображение в направлении XXVI с Фиг. 25.
Фиг. 27 представляет собой вид сбоку справа, иллюстрирующий рабочее состояние амортизирующего механизма.
Фиг. 28 представляет собой вид сбоку справа, иллюстрирующий рабочее состояние амортизирующего механизма.
Фиг. 29 представляет собой схематичное изображение, иллюстрирующее рабочее состояние амортизирующего механизма.
Фиг. 30 представляет собой вид сбоку справа, иллюстрирующий пример самоходного транспортного средства согласно еще одному варианту осуществления.
Фиг. 31 представляет собой вид сверху Фиг. 30.
Фиг. 32 представляет собой вид сбоку справа, иллюстрирующий главным образом конфигурацию рамы корпуса транспортного средства и устройства подвески.
Фиг. 33 представляет собой вид сверху Фиг. 32.
Фиг. 34 представляет собой вид в перспективе, иллюстрирующий раму корпуса транспортного средства.
Фиг. 35 представляет собой вид сбоку справа, иллюстрирующий переднее гусеничное движущее устройство.
Фиг. 36 представляет собой вид сбоку, иллюстрирующий переднее гусеничное движущее устройство, если смотреть с внутренней стороны транспортного средства.
Фиг. 37 представляет собой частично увеличенное изображение в поперечном разрезе, иллюстрирующее переднее гусеничное движущее устройство.
Фиг. 38 представляет собой вид сбоку, иллюстрирующий переднее устройство подвески, если смотреть с внутренней стороны транспортного средства.
Фиг. 39A и 39B представляют собой схематичные изображения, иллюстрирующие работу переднего устройства подвески Фиг. 38, причем Фиг. 39A иллюстрирует состояние, когда соединительный механизм с Фиг. 38 удлинен, а Фиг. 39B иллюстрирует состояние, когда соединительный механизм с Фиг. 38 укорочен.
Фиг. 40 представляет собой вид сбоку справа, иллюстрирующий заднее гусеничное движущее устройство.
Фиг. 41 представляет собой заднее изображение, иллюстрирующее заднее гусеничное движущее устройство и заднее устройство подвески.
Фиг. 42 представляет собой схематичный вид сбоку справа, иллюстрирующий операцию поворота самоходного транспортного средства.
Фиг. 43 представляет собой схематичный вид сверху Фиг. 42.
Фиг. 44 представляет собой схематичный вид сбоку справа, иллюстрирующий операцию поворота самоходного транспортного средства.
Фиг. 45 представляет собой схематичный вид сверху Фиг. 44.
Фиг. 46 представляет собой блок-схему конфигурации, иллюстрирующую пример конфигурации контроллера.
Фиг. 47 представляет собой вид сбоку справа, иллюстрирующий пример переднего устройства подвески согласно еще одному варианту осуществления.
Фиг. 48 представляет собой вид сбоку, иллюстрирующий переднее устройство подвески с Фиг. 47, если смотреть с внутренней стороны транспортного средства.
Фиг. 49A и 49B представляют собой схематичные изображения, иллюстрирующие работу переднего устройства подвески Фиг. 48, причем Фиг. 49A иллюстрирует состояние, когда соединительный механизм с Фиг. 48 удлинен, а Фиг. 49B иллюстрирует состояние, когда соединительный механизм с Фиг. 48 укорочен.
Фиг. 50 представляет собой блок-схему конфигурации, иллюстрирующую пример конфигурации контроллера согласно еще одному варианту осуществления.
Фиг. 51 представляет собой вид сбоку, иллюстрирующий пример переднего устройства подвески согласно еще одному варианту осуществления, если смотреть с внутренней стороны транспортного средства.
Фиг. 52 представляет собой вид сбоку, иллюстрирующий пример переднего устройства подвески согласно еще одному варианту осуществления, если смотреть с внутренней стороны транспортного средства.
Фиг. 53 представляет собой вид сбоку, иллюстрирующий пример переднего устройства подвески согласно еще одному варианту осуществления, если смотреть с внутренней стороны транспортного средства.
Фиг. 54 представляет собой вид сбоку, иллюстрирующий пример переднего устройства подвески согласно еще одному варианту осуществления, если смотреть с внутренней стороны транспортного средства.
Фиг. 55 представляет собой вид сбоку справа, иллюстрирующий главным образом конфигурацию рамы корпуса транспортного средства и устройства подвески примера самоходного транспортного средства согласно еще одному варианту осуществления.
Фиг. 56 представляет собой вид сбоку справа, иллюстрирующий пример самоходного транспортного средства согласно еще одному варианту осуществления.
Описание вариантов осуществления изобретения
[0017] Самоходное транспортное средство согласно изобретению содержит раму корпуса транспортного средства, по меньшей мере пару из правого и левого движущих устройств и устройство подвески, которое подвешивает пару из правого и левого движущих устройств на раме корпуса транспортного средства, при этом устройство подвески в виде единого целого подвешивает пару из правого и левого движущих устройств на раме корпуса транспортного средства и предоставляет возможность колебания или подъема пары из правого и левого движущих устройств относительно рамы корпуса транспортного средства. Самоходное транспортное средство согласно изобретению, обладающее подобным признаком, может быть реализовано посредством нескольких вариантов осуществления. Далее варианты осуществления изобретения будут приведены в качестве примера со ссылкой на чертежи, и будет сделано подробное их описание. Дополнительно, в описании, «переднее» обозначает направление движения вперед самоходного транспортного средства, «заднее» обозначает направление движения назад, «правое и левое» обозначает «правое и левое» в направлении движения вперед, а «верх и низ» обозначает «верх и низ» самоходного транспортного средства. Фиг. 1 представляет собой вид сбоку справа, иллюстрирующий самоходное транспортное средство 1A, которое является примером варианта осуществления изобретения. Фиг. 2 представляет собой вид сбоку справа, иллюстрирующий раму 10A корпуса транспортного средства. Фиг. 3 представляет собой вид в перспективе, иллюстрирующий раму 10A корпуса транспортного средства, если смотреть сверху по диагонали вперед.
[0018] Как проиллюстрировано на Фиг. 1-3, самоходное транспортное средство 1A содержит раму 10A корпуса транспортного средства, передние гусеничные движущие устройства 30A, которые служат в качестве пары из правого и левого движущих устройств, предоставленных в передней части, переднее устройство 50A подвески, которое подвешивает пару из правого и левого передних гусеничных движущих устройств 30A на раме 10A корпуса транспортного средства, задние гусеничные движущие устройства 70A, которые служат в качестве пары из правого и левого движущих устройств, предоставленных в задней части, и заднее устройство 90A подвески, которое подвешивает пару из правого и левого задних гусеничных движущих устройств 70A на раме 10A корпуса транспортного средства. Кроме того, самоходное транспортное средство 1A также содержит аккумулятор BA, который хранит электричество, контроллер CA, который содержит вычислительный блок и блок хранения и управляет устройствами внутри рамы 10A корпуса транспортного средства.
[0019] Верхняя сторона рамы 10A корпуса транспортного средства покрыта оболочкой 110A главного корпуса. Оболочка 110A главного корпуса покрывает раму 10A корпуса транспортного средства. Оболочка 110A главного корпуса содержит передние крылья 111A, которые предоставлены над передними гусеничными движущими устройствами 30A, и задние крылья 112A, которые предоставлены над задними гусеничными движущими устройствами 70A. Между передним гусеничным движущим устройством 30A и задним гусеничным движущим устройством 70A предоставлено водительское сиденье 113A. Водительское сиденье 113A прикреплено к раме 10A корпуса транспортного средства.
[0020] Для управления операцией передвижения самоходного транспортного средства 1A на передней стороне водительского сиденья 113A предоставлена рукоять 114A. Рукоять 114A содержит вал 115A рулевого управления, рукояточный руль 116A, который предоставлен на верхнем конце вала 115A рулевого управления, выступая наружу в горизонтальном направлении, и ручку 117А акселератора, которая служит в качестве акселератора, предоставленного на одном конце рукояточного руля 116A.
[0021] Вал 115A рулевого управления поддерживается рамой 10A корпуса транспортного средства с возможностью поворота. Нижний конец вала 115A рулевого управления снабжен датчиком рукояти (не проиллюстрирован), выявляющим угол поворота вала 115A рулевого управления.
[0022] Ручка 117А акселератора поддерживается рукояточным рулем 116A с возможностью поворота. Ручка 117А акселератора содержит датчик ручки акселератора (не проиллюстрирован), выявляющий угол поворота ручки 117А акселератора.
[0023] Под водительским сиденьем 113A предоставлены правая и левая подножки 118A. Самоходное транспортное средство 1A представляет собой самоходное транспортное средство седлового типа. Водитель сидит на водительском сиденье 113A в то время, как ноги помещаются на правой и левой подножках 118A.
[0024] Далее будет описана рама 10A корпуса транспортного средства. Дополнительно, поскольку рама 10A корпуса транспортного средства имеет горизонтальную симметричную форму, при необходимости правый составной элемент будет соответствующим образом обозначаться ссылочным обозначением R, а левый составной элемент будет соответствующим образом обозначаться ссылочным обозначением L.
[0025] Как проиллюстрировано на Фиг. 2 и 3, рама 10A корпуса транспортного средства получается за счет соединения множества стальных элементов посредством сварки или т.п. Стальной элемент представляет собой цилиндрическую трубу или листообразную пластину. Рама 10A корпуса транспортного средства содержит основную часть 11A рамы, которая проходит в продольном направлении и имеет нижнюю часть, образованную с формой лодочного дна, переднюю часть 12A рамы, которая проходит вверх от передней части основной части 11A рамы, заднюю часть 13A рамы, которая проходит вверх от задней части основной части 11A рамы, и т.п.
[0026] Базовая часть 11A рамы образует главную часть рамы 10A корпуса транспортного средства и используется для прикрепления переднего устройства 50A подвески, заднего устройства 90A подвески и т.п., что будет описано позже. Базовая часть 11A рамы содержит пару правой и левой главных рам 14A (14AR, 14AL), которая проходит вперед и назад, пару правой и левой нижних рам 15A (15AR, 15AL), переднюю опорную пластину 16A, которая образована с листовой формой и используется для прикрепления части переднего устройства 50A подвески, что будет описано позже, заднюю опорную пластину 17A, которая образована с листовой формой и используется для прикрепления части заднего устройства 90A подвески, что будет описано позже, множество усиливающих рам 20A, 21A, 22A, и 23A и т.п.
[0027] Передние концы правой и левой главных рам 14AR и 14AL изогнуты внутрь в направлении по ширине самоходного транспортного средства 1A таким образом, чтобы передние концы соединялись друг с другом. Кроме того, задние концы правой и левой главных рам 14AR и 14AL изогнуты внутрь таким образом, чтобы задние концы соединялись друг с другом.
[0028] Правая и левая нижние рамы 15AR и 15AL расположены, соответственно, под правой и левой главными рамами 14AR и 14AL параллельны, соответственно, правой и левой главным рамам 14AR и 14AL, и предоставлены с продолжением в продольном направлении. Оба конца правой и левой нижних рам 15AR и 15AL, соответственно, наклонены вверх и соединены, соответственно, с правой и левой главными рамами 14AR и 14AL.
[0029] Между центральными частями правой и левой нижних рам 15AR и 15AL расположены два вращающихся вала 18A и 19A, которые продолжаются в горизонтальном направлении. Вращающиеся валы 18A и 19A расположены параллельно с разделением друг от друга в продольном направлении предварительно определенным зазором, и оба их конца выступают в направлении внешней стороны нижних рам 15AR и 15AL. По этой причине, вращающиеся валы 18A и 19A, соответственно, используются для присоединения переднего устройства 50A подвески и заднего устройства 90A подвески к раме 10A корпуса транспортного средства.
[0030] Дополнительно, вращающиеся валы 18A и 19A между правой и левой нижними рамами 15AR и 15AL образованы таким образом, чтобы иметь диаметры больше, чем диаметры, например, главной рамы 14A или нижней рамы 15A. Таким образом, вращающиеся валы 18A и 19A улучшают жесткость рамы 10A корпуса транспортного средства за счет жесткого соединения правой и левой нижних рам 15AR и 15AL.
[0031] Между правой главной рамой 14AR и правой нижней рамой 15AR и между левой главной рамой 14AL и левой нижней рамой 15AL, соответственно, образованы две усиливающие рамы 20A и 21A. Более конкретно, усиливающая рама 20A проходит вверх и назад из области соединительной части вращающегося вала 18A относительно нижней рамы 14A и соединяется по существу с центром главной рамы 14A в продольном направлении. Усиливающая рама 21A проходит вверх и вперед из области соединительной части вращающегося вала 19A относительно нижней рамы 15A и соединяется по существу с центром главной рамы 14A в продольном направлении. По этой причине, за счет усиливающих рам 20A и 21A улучшается прочность поблизости от места расположения вращающихся валов 18A и 19A.
[0032] Дополнительно, базовая часть 11A рамы имеет продольную симметричную форму. Затем два вращающихся вала 18A и 19A расположены в продольном симметричном положении. Кроме того, базовая часть 11A рамы снабжена конструкцией, аналогичной ферменной конструкции, образованной главной рамой 14A, нижней рамой 15A и усиливающими рамами 20A и 21A на боковом изображении. Таким образом, базовая часть 11A рамы обладает большой прочностью, поскольку область вращающихся валов 18A и 19A эффективно усиливается, а прочность выравнивается.
[0033] Передняя опорная пластина 16A представляет собой прямоугольный листообразный элемент, содержит сквозное отверстие 24A, образованное в центре, и расположена на переднем уклоне между правой и левой нижними рамами 15AR и 15AL. Как правый, так и левый концы передней опорной пластины 16A соединены, соответственно, с правой и левой нижними рамами 15AR и 15AL. Как передний, так и задний концы передней опорной пластины 16A снабжены усиливающей рамой 22A, которая проходит вдоль конца, подлежащего соединению с правой и левой нижними рамами 15AR и 15AL. Затем часть переднего устройства 50A подвески, которое будет описано позже, прикрепляют к передней опорной пластине 16A.
[0034] Задняя опорная пластина 17A является аналогичной передней опорной пластине 16A и расположена в продольном симметричном положении, имея в то же время иное расположение. Задняя опорная пластина 17A представляет собой прямоугольный листообразный элемент, содержит сквозное отверстие 25A, образованное в центре, и расположена на заднем уклоне между правой и левой нижними рамами 15AR и 15AL. Как правый, так и левый концы задней опорной пластины 17A соединены, соответственно, с правой и левой нижними рамами 15AR и 15AL. Как передний, так и задний концы задней опорной пластины 17A снабжены усиливающей рамой 23A, которая проходит вдоль конца, подлежащего соединению с правой и левой нижними рамами 15AR и 15AL. Затем, часть заднего устройства 90A подвески, которое будет описано позже, прикрепляют к задней опорной пластине 17A.
[0035] Передняя часть 12A рамы образована множеством цилиндрических стальных элементов и имеет по существу прямоугольную форму, продолжающуюся вверх на боковом изображении. Передняя часть 12A рамы используется для поддержки с возможностью вращения рукояти 114A (не проиллюстрировано). В верхней части передней части 12A рамы предоставлена передняя труба 26A. Передняя труба 26A представляет собой цилиндрическую трубу, имеющую отверстие, образованное на обоих ее концах, и расположена таким образом, что передняя часть является низкой, а задняя часть является высокой. Дополнительно, передняя труба 26A находится в центре рамы 10A корпуса транспортного средства в горизонтальном направлении. По этой причине вал 115A рулевого управления вставляют через переднюю трубу 26A сверху таким образом, чтобы рукоять 114A поддерживалась с возможностью поворота.
[0036] Задняя часть 13A рамы образована множеством цилиндрических стальных элементов и имеет по существу кубическую форму. Водительское сиденье 113A (не проиллюстрировано) прикреплено к верхней части задней части 13A рамы. Кроме того, внутри задней части 13A рамы размещены различные устройства, такие как аккумулятор BA (не проиллюстрировано).
[0037] Дополнительно, рама 10A корпуса транспортного средства не ограничена описанной выше конфигурацией. Рама 10A корпуса транспортного средства может использоваться для прикрепления к нему переднего устройства 50A подвески и заднего устройства подвески 90B и обладать достаточной жесткостью для самоходного транспортного средства. Например, рама 10A корпуса транспортного средства вместо цилиндрической трубы может быть образована полым квадратным столбчатым элементом или стальным элементом, имеющим L-образное или H-образное поперечное сечение. Кроме того, может быть использована конфигурация, в которой поперек рамы натянут листообразный элемент для того, чтобы улучшить прочность или чтобы разместить различные устройства.
[0038] Далее будут описаны передние гусеничные движущие устройства 30A, служащие в качестве пары из правого и левого движущих устройств. Дополнительно, поскольку правое и левое передние гусеничные движущие устройства 30A имеют горизонтальную симметричную форму, ниже типовым образом будет описано правое переднее гусеничное движущее устройство 30A. Описание конфигурации левого переднего гусеничного движущего устройства 30A будет пропущено. Кроме того, при необходимости для правого переднего гусеничного движущего устройства 30A будет соответствующим образом добавлено ссылочное обозначение R, а для левого переднего гусеничного движущего устройства 30A будет соответствующим образом добавлено ссылочное обозначение L. Фиг. 4 представляет собой вид сбоку справа, иллюстрирующий переднее гусеничное движущее устройство 30A. Фиг. 5 представляет собой частично увеличенное изображение в поперечном разрезе, иллюстрирующее переднее гусеничное движущее устройство 30A. Фиг. 5 используется для описания конфигурации крепления ведущего колеса 31A, правая сторона показывает внешнюю сторону транспортного средства, левая сторона показывает внутреннюю часть транспортного средства, верхняя сторона показывает переднюю сторону транспортного средства, а нижняя сторона показывает заднюю сторону транспортного средства. Фиг. 6 представляет собой частично увеличенное изображение в поперечном разрезе, иллюстрирующее переднее гусеничное движущее устройство 30A. Фиг. 6 используется для описания конфигурации крепления ведущего колеса 31A, правая сторона показывает внешнюю сторону транспортного средства, левая сторона показывает внутреннюю часть транспортного средства, верхняя сторона показывает верхнюю сторону транспортного средства, а нижняя сторона показывает нижнюю сторону транспортного средства.
[0039] Как проиллюстрировано на Фиг. 4, переднее гусеничное движущее устройство 30A содержит ведущее колесо 31A, которое предоставлено в верхней части, ведомые колеса 32A, которые предоставлены ниже ведущего колеса 31A с расположением в передней и задней частях, четыре вспомогательных катка 33A, которые предоставлены между двумя ведомыми колесами 32A, гусеничную ленту 34A, крепежную раму 35A, двигатель 36A, который служит в качестве приводного устройства для приведения в движение гусеничного движущего устройства, и корпус 37A редуктора.
[0040] Гусеничная лента 34A обернута вокруг ведущего колеса 31A, двух ведомых колес 32A и четырех вспомогательных катков 33A таким образом, чтобы контактировать с их наружной периферией. Крепежная рама 35A образована тремя цилиндрическими трубами и образована с направленной вверх по существу треугольной формой. Ведущее колесо 31A поддерживается с возможностью вращения на верхней вершине треугольной формы крепежной рамы 35A. Ведомые колеса 32A поддерживаются с возможностью вращения поблизости от двух нижних вершин треугольной формы крепежной рамы 35A, а четыре вспомогательных катка 33A поддерживаются с возможностью вращения между двумя ведомыми колесами 32A. Двигатель 36A и корпус 37A редуктора расположены на крепежной раме 35A на внутренней стороне транспортного средства, а движущая мощность двигателя 36A передается на ведущее колесо 31A через корпус 37A редуктора таким образом, чтобы приводить в движение переднее гусеничное движущее устройство 30A.
[0041] Более конкретно, как проиллюстрировано на Фиг. 5, двигатель 36A прикреплен к переднему концу корпуса 37A редуктора, продолжающегося в продольном направлении, и расположен на внутренней стороне транспортного средства, а ведущий вал 38A двигателя 36A выступает в корпус 37A редуктора. Ведущее колесо 31A находится на заднем конце корпуса 37A редуктора снаружи транспортного средства, конец вращающегося вала 39A, прикрепленный к ведущему колесу 31A на внутренней стороне транспортного средства, выступает в корпус 37A редуктора. Внутри корпуса 37A редуктора звездочки (не проиллюстрировано), соответственно, прикрепляют к ведущему валу 38A двигателя 36A и вращающемуся валу 39A ведущего колеса 31A. Затем звездочки соединяют друг с другом взаимосвязанным образом посредством бесконечной цепи (не проиллюстрировано).
[0042] Таким образом, переднее гусеничное движущее устройство 30A выполнено с возможностью передачи мощности двигателя 36A на ведущий вал 38A, звездочки, цепь и вращающийся вал 39A. По этой причине переднее гусеничное движущее устройство 30A приводится в движение таким образом, что ведущее колесо 31A вращается за счет мощности, передаваемой на вращающийся вал 39A.
[0043] Дополнительно, конец вращающегося вала 39A ведущего колеса 31A снаружи транспортного средства проходит в крепежную раму 35A, а крепежная рама 35A соединена с возможностью вращения с вращающимся валом 39A. То есть переднее гусеничное движущее устройство 30A выполнено с возможностью поворота в продольном направлении вокруг вращающегося вала 39A, служащего в качестве оси.
[0044] Кроме того, как проиллюстрировано на Фиг. 5 и 6, на заднем конце корпуса 37A редуктора на внутренней стороне транспортного средства образован кронштейн 40A, который образован двумя верхним и нижним листообразными элементами, выступающими в направлении внутренней части транспортного средства. Два верхний и нижний листообразные элементы кронштейна 40A содержат сквозное отверстие 41A, образованное в вертикальном направлении. Переднее гусеничное движущее устройство 30A соединено с передним устройством 50A подвески, как будет описано позже, посредством кронштейна 40A с возможностью поворота в горизонтальном направлении относительно вертикального направления, служащего в качестве оси. Затем, один конец устройства рулевого управления (не проиллюстрировано), расположенного в раме 10A корпуса транспортного средства, соединен с кронштейном 40AR правого переднего гусеничного движущего устройства 30AR, а другой конец устройства рулевого управления соединен с кронштейном 40AL левого переднего гусеничного движущего устройства 30AL. Поскольку правое и левое передние гусеничные движущие устройства 30AR и 30AL качаются взаимосвязанным образом в горизонтальном направлении посредством устройства рулевого управления, самоходным транспортным средством 1A можно управлять.
[0045] Переднее гусеничное движущее устройство 30A образовано таким образом, чтобы гусеничная лента 34A между двумя ведомыми колесами 32A контактировала с землей. То есть переднее гусеничное движущее устройство 30A имеет направленную вверх треугольную форму, нижняя сторона которой становится контактирующей с землей частью, а треугольная форма образована таким образом, что нижняя сторона изогнута в направлении вниз. Дополнительно, треугольная форма образована таким образом, что верхняя вершина, снабженная ведущим колесом 31A, смещена назад, а вершина, снабженная передним ведомым колесом 32A, находится над вершиной, снабженной задним ведомым колесом 32A.
[0046] Поскольку переднее гусеничное движущее устройство 30A имеет описанную выше конфигурацию, гусеничная лента 34A легко захватывается выпуклой частью, выступающей вверх от земли, когда движущее устройство поднимается поверх выпуклой части, и, таким образом, стабилизируется операция передвижения. Кроме того, поскольку переднее гусеничное движущее устройство 30A поддерживается с возможностью поворота в продольном направлении, улучшается эффективность контакта с землей для земли, и за счет поворота переднего гусеничного движущего устройства 30A получается амортизирующее действие. Таким образом, транспортное средство может устойчиво двигаться, и улучшается комфорт во время движения.
[0047] Дополнительно, переднее гусеничное движущее устройство 30A также содержит устройство регулировки натяжения (не проиллюстрировано), которое регулирует натяжение гусеничной ленты 34A за счет перемещения положения ведомого колеса 32A относительно крепежной рамы 35A, тормозное устройство (не проиллюстрировано), которое останавливает вращение ведущего колеса 31A, амортизирующий механизм, который устраняет поворот переднего гусеничного движущего устройства 30A в продольном направлении вокруг вращающегося вала 39A, служащего в качестве оси, и т.п. Между крепежной рамой 35A и корпусом 37A редуктора предоставлен амортизирующий механизм. Соответственно, переднее гусеничное движущее устройство 30A устойчиво контактирует с землей, и улучшается эффективность передвижения или комфорт во время движения. Кроме того, поскольку амортизирующий механизм может уменьшать нагрузку на переднее устройство 50A подвески, такую как столкновение или закручивание соединительной части, когда переднее гусеничное движущее устройство 30A контактирует с неровным участком неровной земли, улучшается долговечность.
[0048] Далее будет описана пара из правого и левого задних гусеничных движущих устройств 70A, служащих в качестве движущих устройств. Дополнительно, поскольку правое и левое задние гусеничные движущие устройства 70A имеют горизонтальную симметричную форму, ниже типовым образом будет описано правое заднее гусеничное движущее устройство 70A. Описание конфигурации левого заднего гусеничного движущего устройства 70A будет пропущено. Кроме того, при необходимости правому заднему гусеничному движущему устройству 70A будет соответствующим образом добавлено ссылочное обозначение R, а левому заднему гусеничному движущему устройству 70A будет соответствующим образом добавлено ссылочное обозначение L. Фиг. 7 представляет собой вид сбоку справа, иллюстрирующий заднее гусеничное движущее устройство 70A, а Фиг. 8 представляет собой частично увеличенное изображение в поперечном разрезе, иллюстрирующее заднее гусеничное движущее устройство 70A. Фиг.8 используется для описания конфигурации крепления ведущего колеса 71A, правая сторона показывает внешнюю сторону транспортного средства, левая сторона показывает внутреннюю часть транспортного средства, верхняя сторона показывает переднюю сторону транспортного средства, а нижняя сторона показывает заднюю сторону транспортного средства.
[0049] Как проиллюстрировано на Фиг. 7, заднее гусеничное движущее устройство 70A содержит ведущее колесо 71A, которое предоставлено в верхней части, ведомые колеса 72A, которые предоставлены ниже ведущего колеса 71A с расположением в передней и задней частях, четыре вспомогательных катка 73A, которые предоставлены между двумя ведомыми колесами 72A, гусеничную ленту 74A, крепежную раму 75A, двигатель 76A, который служит в качестве приводного устройства для приведения в движение гусеничного движущего устройства, и т.п.
[0050] В данном случае, на боковом изображении заднее гусеничное движущее устройство 70A по аналогии с передним гусеничным движущим устройством 30A образовано с направленной вверх треугольной формой. Соединение между задним гусеничным движущим устройством 70A и задним устройством 90A подвески, которое будет описано ниже, отличается от соединения переднего гусеничного движущего устройства 30A, а в соединении не используется кронштейн 40A. Кроме того, отличается место расположения двигателя 76A заднего гусеничного движущего устройства 70A. По этой причине будет соответствующим образом пропущено описание такой же конфигурации, как конфигурация переднего гусеничного движущего устройства 30A.
[0051] Как проиллюстрировано на Фиг. 8, двигатель 76A находится на крепежной раме 75A на внутренней стороне транспортного средства и прикреплен к качающемуся рычагу 94A заднего устройства 90A подвески, как будет описано позже (к фланцевой части 102A первого плеча 100A). Ведущее колесо 71A прикреплено к ведущему валу 78A двигателя 76A. Заднее гусеничное движущее устройство 70A приводится в движение таким образом, чтобы вращался ведущий вал 78A двигателя 76A.
[0052] Дополнительно, конец ведущего вала 78A двигателя 76A снаружи транспортного средства проходит в крепежную раму 75A, а крепежная рама 75A соединена с возможностью вращения с ведущим валом 78A. То есть заднее гусеничное движущее устройство 70A выполнено с возможностью поворота в продольном направлении вокруг ведущего вала 78A, служащего в качестве оси.
[0053] По аналогии с передним гусеничным движущим устройством 30A заднее гусеничное движущее устройство 70A образовано таким образом, чтобы гусеничная лента 74A между двумя ведомыми колесами 72A контактировала с землей. Дополнительно, контактирующая с землей часть заднего гусеничного движущего устройства 70A шире, чем контактирующая с землей часть переднего гусеничного движущего устройства 30A. Таким образом, поскольку гусеничная лента 74A имеет более широкую контактирующую с землей часть, транспортное средство может устойчиво двигаться.
[0054] Кроме того, поскольку заднее гусеничное движущее устройство 70A поддерживается с возможностью поворота в продольном направлении, улучшается эффективность контакта с землей для земли, а за счет поворота переднего гусеничного движущего устройства 30A получается амортизирующее действие. Таким образом, транспортное средство может устойчиво двигаться, и улучшается комфорт во время движения.
[0055] Дополнительно, по аналогии с передним гусеничным движущим устройством 30A заднее гусеничное движущее устройство 70A также содержит устройство регулировки натяжения (не проиллюстрировано), которое регулирует натяжение гусеничной ленты 74A за счет перемещения положения ведомого колеса 72A относительно крепежной рамы 75A, тормозное устройство (не проиллюстрировано), которое останавливает вращение ведущего колеса 71A, амортизирующий механизм, который устраняет поворот заднего гусеничного движущего устройства 70A в продольном направлении вокруг ведущего вала 78A, служащего в качестве оси, и т.п. Как будет описано позже, амортизирующий механизм предоставлен между крепежной рамой 75A и качающимся рычагом 94A заднего устройства 90A подвески. Соответственно, заднее гусеничное движущее устройство 70A устойчиво контактирует с землей, и улучшается эффективность передвижения или комфорт во время движения. Кроме того, поскольку амортизирующий механизм может уменьшать нагрузку на заднее устройство 90A подвески, такую как столкновение или закручивание соединительной части, когда заднее гусеничное движущее устройство 70A контактирует с неровным участком неровной земли, улучшается долговечность.
[0056] В данном случае, двигателями 36A и 76A, служащими в качестве приводных устройств, приводящих в движение передние и задние гусеничные движущие устройства 30A и 70A, являются электрические двигатели, приводимые в действие за счет электрической энергии аккумулятора BA, и под управлением контроллера CA. электричество (электрическая энергия) из аккумулятора BA в двигатели 36A и 76A или управляющий сигнал из контроллера CA передается с помощью гибкого многожильного кабеля. Затем, когда двигатели 36A и 76A приводятся в действие за счет электрической энергии аккумулятора BA, передние и задние гусеничные движущие устройства 30A и 70A приводятся в действие таким образом, чтобы самоходное транспортное средство 1A двигалось. Дополнительно, двигатели 36A и 76A, служащие в качестве приводных устройств передних и задних гусеничных движущих устройств 30A и 70A предоставлены, соответственно, внутри передних и задних гусеничных движущих устройств 30A и 70A.
[0057] Таким образом, поскольку нет необходимости предоставления между рамой 10A корпуса транспортного средства и передними и задними гусеничными движущими устройствами 30A и 70A механизма передачи, такого как ведущий вал, может быть упрощена конфигурация передачи приводной мощности. Соответственно, уменьшается количество составных элементов, а производительность или технологичность технического обслуживания становится удовлетворительной.
[0058] Кроме того, как будет описано позже, передние и задние гусеничные движущие устройства 30A и 70A могут в значительной степени колебаться в вертикальном направлении передним и задним устройствами 50A и 90A подвески. Таким образом, необходимо подавать электрическую энергию из аккумулятора BA, расположенного на раме 10A корпуса транспортного средства, в двигатели 36A и 76A передних и задних гусеничных движущих устройств 30A и 70A, не нарушая колебания в вертикальном направлении. Соответственно, когда используют гибкий многожильный кабель, передние и задние гусеничные движущие устройства 30A и 70A могут приводиться в действие, не нарушая колебания в вертикальном направлении.
[0059] Кроме того, передние и задние гусеничные движущие устройства 30A и 70A не ограничены описанной выше конфигурацией. Например, гусеничное движущее устройство может иметь квадратную или трапециевидную форму на боковом изображении. Кроме того, переднее гусеничное движущее устройство 30A и заднее гусеничное движущее устройство 70A могут иметь такую же форму. С подобной конфигурацией уменьшается количество составных элементов, и улучшается производительность.
[0060] Кроме того, может быть использована конфигурация, в которой между ведущими колесами 31A и 71A и двигателями 36A и 76A предоставлено изменяющее скорость устройство, и движущая мощность двигателей 36 и 76 передается ведущим колесам 31A и 71A через изменяющее скорость устройство. С подобной конфигурацией передние и задние гусеничные движущие устройства 30A и 70A кроме того могут легко приводиться в действие с требуемой мощностью.
[0061] Кроме того, соединение взаимосвязанным образом между ведущими колесами 31A и 71A и двигателями 36A и 76A передних и задних гусеничных движущих устройств 30A и 70A не ограничено описанной выше конфигурацией. Например, двигатели 36A и 76A могут быть расположены на ведущих колесах 31A и 71A снаружи транспортного средства, а двигатели 36A и 76A могут быть расположены во внутриколесном виде внутри ведущих колес 31A и 71. Кроме того, по аналогии с передним гусеничным движущим устройством 30A заднее гусеничное движущее устройство 70A может иметь конфигурацию, в которой двигатель 76A и ведущее колесо 71A соединены друг с другом взаимосвязанным образом через корпус редуктора. С подобной конфигурацией улучшается степень свободы в компоновке двигателя.
[0062] Кроме того, по аналогии с задним гусеничным движущим устройством 70A переднее гусеничное движущее устройство 30A может иметь конфигурацию, в которой ведущее колесо 31A прикреплено к ведущему валу 38A двигателя 36A. Дополнительно, переднее гусеничное движущее устройство 30A смещает положение двигателя 36A вперед за счет соединения двигателя 36A и ведущего колеса 31A друг с другом взаимосвязанным образом через корпус 37A редуктора. С подобной конфигурацией обеспечивается пространство, допускающее поворот переднего гусеничного движущего устройства 30A в горизонтальном направлении. Таким образом, требуется конфигурация, в которой положение двигателя 36A смещено вперед, как описано выше, с точки зрения механизма рулевого управления. Соответственно, можно предотвратить увеличение размера самоходного транспортного средства 1A.
[0063] Кроме того, двигатели 36A и 76A, служащие в качестве приводных устройств передних и задних гусеничных движущих устройств 30A и 70A, не ограничены электрическими двигателями. Например, могут использоваться гидравлические двигатели, приводимые в действие за счет давления текучей среды. Например, при использовании гидравлического двигателя самоходное транспортное средство 1A образовано таким образом, что внутри рамы 10A корпуса транспортного средства предоставлены двигатель, служащий в качестве пускового двигателя, насос, приводимый в действие двигателем, резервуар для хранения масла, служащего в качестве гидравлической жидкости, и т.п. Насос соединен с гидравлическими двигателями передних и задних гусеничных движущих устройств 30A и 70A посредством гибкого шланга через гидравлическое устройство. Затем, движущая мощность двигателя передается гидравлическому двигателю через насос таким образом, чтобы приводить в действие передние и задние гусеничные движущие устройства 30A и 70A. Дополнительно, гидравлическое устройство содержит клапаны, такие как переключающий клапан, предохранительный клапан и клапан регулировки нормы расхода или гидравлическое оборудование, такое как фильтр. При регулировке контроллером CA различных клапанов может изменяться скорость протекания, давление масла, направление притока и т.п. гидравлического масла в каждый гидравлический двигатель. Затем, гидравлические двигатели, служащие в качестве приводных устройств передних и задних гусеничных движущих устройств 30A и 70A предоставлены, соответственно, внутри передних и задних гусеничных движущих устройств 30A и 70A.
[0064] Таким образом, согласно подобной конфигурации, поскольку нет необходимости предоставления между рамой 10A корпуса транспортного средства и передними и задними гусеничными движущими устройствами 30A и 70A механизма передачи, такого как ведущий вал, может быть упрощена конфигурация передачи приводной мощности. Соответственно, уменьшается количество составных элементов, а производительность или технологичность технического обслуживания становится удовлетворительной.
[0065] Кроме того, как описано выше, передние и задние гусеничные движущие устройства 30A и 70A могут в значительной степени колебаться в вертикальном направлении передним и задним устройствами 50A и 90A подвески, как будет описано позже. Таким образом, необходимо подавать гидравлическое масло из насоса, расположенного на раме 10A корпуса транспортного средства, в гидравлические двигатели передних и задних гусеничных движущих устройств 30A и 70A, не нарушая колебания в вертикальном направлении. Соответственно, при использовании гибкого шланга передние и задние гусеничные движущие устройства 30A и 70A могут приводиться в действие, не нарушая колебания в вертикальном направлении.
[0066] Дополнительно, когда в приводных устройствах передних и задних гусеничных движущих устройств 30A и 70A используют гидравлические двигатели, легко может быть получена большая мощность. Между тем, когда в приводных устройствах передних и задних гусеничных движущих устройств 30A и 70A используют электрические двигатели, управление может быть легко выполняемым, а ответная реакция становится удовлетворительной.
[0067] Далее будет описано переднее устройство 50A подвески. Дополнительно, поскольку переднее устройство 50A подвески имеет горизонтальную симметричную форму, при необходимости правый составной элемент будет соответствующим образом обозначаться ссылочным обозначением R, а левый составной элемент будет соответствующим образом обозначаться ссылочным обозначением L. Фиг. 9 представляет собой вид сбоку справа, иллюстрирующий переднее устройство 50A подвески. Фиг. 10 представляет собой изображение в направлении X Фиг. 9. Фиг. 11 представляет собой вид в перспективе, иллюстрирующий переднее устройство 50A подвески, если смотреть снизу по диагонали вперед.
[0068] Как проиллюстрировано на Фиг. 9-11, переднее устройство 50A подвески содержит вращающийся рычаг 51A, двигатель 52A, который служит в качестве устройства вращения, поворачивающего вращающийся рычаг 51A, пару из правого и левого соединительных рычагов 53A (53AR, 53AL), пару из правого и левого качающихся рычагов 54A (54AR, 54AL) и т.п. Дополнительно, на Фиг. 11 пропущено описание рамы 10A корпуса транспортного средства. Кроме того, на Фиг. 9-11, линия L1A представляет собой линию, проходящую через центр вращающегося вала 18A, а линия L2A представляет собой линию, проходящую через центр поворота вращающегося рычага 51A.
[0069] Вращающийся рычаг 51A представляет собой квадратный столбчатый элемент, продолжающийся в горизонтальном направлении, который содержит вращающийся вал 55A, расположенный в центре в горизонтальном направлении. Вращающийся рычаг 51A поддерживается кронштейном 56A с возможностью поворота вокруг вращающегося вала 55A, служащего в качестве оси (линия L2A). Кронштейн 56A прикреплен к нижней поверхности передней опорной пластины 16A рамы 10A корпуса транспортного средства. Таким образом, вращающийся рычаг 51A поддерживается рамой 10A корпуса транспортного средства посредством кронштейна 56A с возможностью поворота относительно вертикального направления в качестве оси. Дополнительно, вращающийся вал 55A расположен перпендикулярно передней опорной пластине 16A, и вращающийся вал 55A наклонен в продольном направлении.
[0070] Двигатель 52A прикреплен к верхней поверхности передней опорной пластины 16A рамы 10A корпуса транспортного средства, в то время как ось привода (не проиллюстрировано) направлена вниз. Дополнительно, ведущий вал двигателя 52A соединен с вращающимся валом 55A вращающегося рычага 51A через изменяющее скорость устройство (не проиллюстрировано), содержащее шестерни и т.п. Таким образом, двигатель 52A способен поворачивать вращающийся рычаг 51A вокруг вращающегося вала 55A, служащего в качестве оси.
[0071] В данном случае, вращающийся рычаг 51A не ограничен описанной выше конфигурацией. Вращающийся рычаг 51A может продолжаться в горизонтальном направлении и может поддерживаться рамой 10A корпуса транспортного средства с возможностью поворота в центре вращающегося рычага в горизонтальном направлении. Например, может быть использована конфигурация, в которой вращающийся вал 55A не наклонен в продольном направлении, то есть вращающийся вал 55A расположен перпендикулярно, или конфигурация, в которой вращающийся вал 55A расположен горизонтально. Дополнительно, необходимо располагать вращающийся рычаг 51A таким образом, чтобы вращающийся вал 55A располагался по существу в вертикальном направлении с точки зрения эффективного обеспечения и использования пространства внутри рамы 10A корпуса транспортного средства. С подобной конфигурацией переднее устройство 50A подвески может быть расположено вдоль рамы 10A корпуса транспортного средства и, таким образом, может эффективно использоваться внутреннее пространство рамы 10A корпуса транспортного средства.
[0072] Кроме того, соединение между вращающимся рычагом 51A и ведущим валом двигателя 52A не имеет особых ограничений, и вращающийся вал 55A и ведущий вал двигателя 52A могут быть соединены непосредственно друг с другом.
[0073] В данном случае двигателем 52A является электрический двигатель, который приводится в движение за счет электрической энергии аккумулятора BA и которым управляет контроллер CA. Дополнительно, устройство, которое поворачивает вращающийся рычаг 51A, может быть выполнено с возможностью поворота вращающегося рычага 51A на предварительно определенный угол в предварительно определенном направлении вращения и не ограничено электрическим двигателем.
[0074] Например, также может быть задействован гидравлический двигатель, приводимый в действие давлением текучей среды. По аналогии со случаем, когда двигателями 36A и 76A, служащими в качестве приводных устройств передних и задних гусеничных движущих устройств 30A и 70A, являются гидравлические двигатели, при использовании гидравлических двигателей, самоходное транспортное средство 1A содержит двигатель, который служит в качестве пускового двигателя, насос, который приводится в движение двигателем, резервуар, который хранит масло в качестве гидравлической жидкости, и т.п. Гидравлический двигатель, который служит в качестве устройства, которое поворачивает вращающийся рычаг 51A, соединен с насосом через гидравлическое устройство, содержащее гидравлическое оборудование, такое как переключающий клапан. Затем, когда переключающим клапаном гидравлического устройства и т.п. управляет контроллер CA, гидравлический двигатель поворачивается на требуемый угол в требуемом направлении. Затем, вращающийся рычаг 51A поворачивается за счет вращения гидравлического двигателя.
[0075] Кроме того, вместо гидравлического двигателя устройством, которое поворачивает вращающийся рычаг 51A, может быть гидравлический цилиндр, содержащий поршневой шток, гильзу цилиндра и т.п. При использовании гидравлического цилиндра один конец соединяют с вращающимся рычагом 51A, а другой конец присоединяют к раме 10A корпуса транспортного средства. Затем, когда по аналогии с гидравлическим двигателем переключающим клапаном гидравлического устройства управляет контроллер CA, гидравлический цилиндр передвигаться телескопическим образом. Затем, вращающийся рычаг 51A поворачивается за счет телескопического движения гидравлического цилиндра.
[0076] Дополнительно, необходимо, чтобы источники привода передних и задних гусеничных движущих устройств 30A и 70A были аналогичны источнику привода устройства вращения, поворачивающего вращающийся рычаг 51A, с точки зрения, может ли быть уменьшено количество составных элементов, может ли легко достигаться производительность, и может ли быть уменьшена масса транспортного средства. То есть когда двигателями 36A и 76A, служащими в качестве приводных устройств передних и задних гусеничных движущих устройств 30A и 70A, являются электрические двигатели, необходимо, чтобы устройством вращения, вращающим вращающийся рычаг 51A, был электрический двигатель, приводимый в действие за счет электрической энергии. Между тем, когда двигателями 36A и 76A являются гидравлические двигатели, необходимо, чтобы устройством вращения, вращающим вращающийся рычаг 51A, был гидравлический двигатель или гидравлический цилиндр, приводимый в действие давлением текучей среды.
[0077] Соединительный рычаг 53A (53AR, 53AL) представляет собой телескопический штангообразный амортизирующий механизм, содержащий цилиндр и т.п., и представляет собой так называемый амортизатор. Один конец правого соединительного рычага 53AR соединен с правым концом вращающегося рычага 51A через шаровое соединение 57AR, служащее в качестве универсального шарнира. Другой конец правого соединительного рычага 53AR соединен с правым качающимся рычагом 54AR через шаровое соединение 58AR, служащее в качестве универсального шарнира.
[0078] По аналогии с правым соединительным рычагом 53AR один конец левого соединительного рычага 53AL соединен с левым концом вращающегося рычага 51A через шаровое соединение 57AL, служащее в качестве универсального шарнира. Кроме того, другой конец левого соединительного рычага 53AL соединен с левым качающимся рычагом 54AL через шаровое соединение 58AL, служащее в качестве универсального шарнира. То есть один конец соединительного рычага 53A соединен с вращающимся рычагом 51A через шаровое соединение 57A, а другой его конец соединен с качающимся рычагом 54A через шаровое соединение 58A.
[0079] В данном случае соединительный рычаг 53A не ограничен описанной выше конфигурацией. Один конец соединительного рычага 53A может быть соединен с вращающимся рычагом 51A, а другой его конец может быть соединен с поворачивающимся рычагом 54A. Например, вместо шарового соединения в качестве универсального шарнира может быть выполнено соединение, использующее универсальный шарнир крестового типа. Кроме того, соединительным рычагом 53A может быть не телескопический штангообразный амортизирующий механизм, а это может быть рычаг, образованный стальным элементом. Однако, для того, чтобы осуществлять стабильную операцию передвижения и улучшать во время движения комфорт, необходимо, чтобы соединительный рычаг 53A содержал амортизирующий механизм, и использовался телескопический штангообразный амортизирующий механизм, выполняющий функцию амортизатора.
[0080] Качающийся рычаг 54A (54AR, 54AL) содержит опорную часть 59A, первое плечо 60A, второе плечо 61A и т.п. Затем, качающийся рычаг 54A образован по существу с L-образной формой на боковом изображении таким образом, что первое плечо 60A и второе плечо 61A продолжаются из опорной части 59A.
[0081] Опорная часть 59A имеет цилиндрическую форму, продолжающуюся в горизонтальном направлении, и поддерживается вращающимся валом 18A рамы 10A корпуса транспортного средства с возможностью поворота.
[0082] Первое плечо 60A представляет собой штангообразный элемент, который проходит вперед от внешней периферии опорной части 59A, и его конец соединен с передним гусеничным движущим устройством 30A. Конец первого плеча 60A разветвляется на верхнюю и нижнюю вилки, а между вилками прикреплен вращающийся вал 62A. Затем, вращающийся вал 62A вставляют через сквозное отверстие 41A кронштейна 40A переднего гусеничного движущего устройства 30A. Таким образом, переднее гусеничное движущее устройство 30A соединяют с концом первого плеча 60A посредством кронштейна 40A с возможностью поворота в горизонтальном направлении относительно вертикального направления, служащего в качестве оси (вращающийся вал 62A). Дополнительно, вращающийся вал 62A проходит через центр вращающегося вала 39A переднего гусеничного движущего устройства 30A на боковом изображении.
[0083] Второе плечо 61A представляет собой штангообразный элемент, который проходит вниз от внешней периферии опорной части 59A, и его конец соединен с одним концом соединительного рычага 53A через шаровое соединение 58A, служащее в качестве универсального шарнира. Дополнительно, второе плечо 61A находится на внутренней стороне транспортного средства относительно первого плеча 60A. Кроме того, длина второго плеча 61A короче, чем длина первого плеча 60A. Таким образом, качающийся рычаг 54A поддерживается рамой 10A корпуса транспортного средства через опорную часть 59A с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси (линия L1A). Кроме того, качающийся рычаг 54A соединен с передним гусеничным движущим устройством 30A посредством первого плеча 60A. В дополнение, качающийся рычаг 54A соединен с одним концом соединительного рычага 53A посредством второго плеча 61A.
[0084] В данном случае качающийся рычаг 54A не ограничен описанной выше конфигурацией. Качающийся рычаг 54A может поддерживаться рамой 10A корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и его конец может быть соединен с передним гусеничным движущим устройством 30A, и соединен с концом соединительного рычага 53A. Например, качающийся рычаг 54A может иметь конфигурацию, в которой первое плечо 60A и второе плечо 61A расположены на одной линии на боковом изображении. Кроме того, второе плечо 61A может продолжаться из первого плеча 60A. Дополнительно, когда рассматривается передача усилия на соединительный рычаг 53A, как будет описано позже, первое плечо 60A и второе плечо 61A могут продолжаться из опорной части 59A, а второе плечо 61A и соединительный рычаг 53A могут быть соединены друг с другом с образованием по существу прямого угла на боковом изображении.
[0085] Кроме того, первое плечо 60A и второе плечо 61A не ограничены описанными выше формами и могут иметь, например, изогнутые формы. Кроме того, второе плечо 61A может продолжаться вверх от внешней периферии опорной части 59. Дополнительно, когда рассматривается работа качающегося рычага 54A, как будет описано позже, необходимо, чтобы расстояние от вращающегося вала 18A, служащего в качестве центра поворота качающегося рычага 54A, до соединительной части между первым плечом 60A и передним гусеничным движущим устройством 30A было длиннее, чем расстояние от вращающегося вала 18A до соединительной части между вторым плечом 61A и соединительным рычагом 53A. То есть необходимо, чтобы расстояние от вращающегося вала 18A до соединительной части между качающимся рычагом 54A и передним гусеничным движущим устройством 30A было длиннее, чем расстояние от вращающегося вала 18A до соединительной части между качающимся рычагом 54A и соединительным рычагом 53A.
[0086] Далее будет описано заднее устройство 90A подвески. Дополнительно, поскольку заднее устройство 90A подвески имеет горизонтальную симметричную форму, при необходимости правый составной элемент будет соответствующим образом обозначаться ссылочным обозначением R, а левый составной элемент будет соответствующим образом обозначаться ссылочным обозначением L. Фиг. 12 представляет собой вид сбоку справа, иллюстрирующий заднее устройство 90A подвески. Фиг. 13 представляет собой изображение в направлении XIII Фиг. 12. Дополнительно, на Фиг. 12 и 13 линия L3A представляет собой линию, проходящую через центр вращающегося вала 19A, а линия L4A представляет собой линию, проходящую через центр поворота вращающегося рычага 91A.
[0087] Как проиллюстрировано на Фиг. 12 и 13, заднее устройство 90A подвески содержит вращающийся рычаг 91A, двигатель 92A, который служит в качестве устройства вращения, поворачивающего вращающийся рычаг 91A, пару из правого и левого соединительных рычагов 93A (93AR, 93AL), пару из правого и левого качающихся рычагов 94A (94AR, 94AL) и т.п.
[0088] В данном случае заднее устройство 90A подвески является продольно симметричным переднему устройству 50A подвески относительно линии L1A за исключением формы качающегося рычага 94A. Соединение между качающимся рычагом 94A и задним гусеничным движущим устройством 70A отличается от соединения между передним гусеничным движущим устройством 30A и качающимся рычагом 54A переднего устройства 50A подвески, причем соединение выполнено без кронштейна 40A. То есть, поскольку отличается только форма конца первого плеча 100A качающегося рычага 94A, описание такой же конфигурации, как конфигурация переднего устройства 50A подвески, будет соответствующим образом пропущено.
[0089] Вращающийся рычаг 91A поддерживается кронштейном 96A с возможностью поворота вокруг вращающегося вала 95A, служащего в качестве оси, причем кронштейн 96A прикреплен к нижней поверхности задней опорной пластины 17A рамы 10A корпуса транспортного средства. Затем, вращающийся рычаг 91A поддерживается рамой 10A корпуса транспортного средства посредством кронштейна 96A с возможностью поворота вокруг по существу вертикального направления, служащего в качестве оси. Дополнительно, вращающийся вал 95A наклонен в продольном направлении.
[0090] Двигатель 92A прикреплен к верхней поверхности задней опорной пластины 17A рамы 10A корпуса транспортного средства. Ведущий вал (не проиллюстрировано) двигателя 92A соединен с вращающимся валом 95A вращающегося рычага 91A через изменяющее скорость устройство (не проиллюстрировано), содержащее шестерни и т.п. По этой причине двигатель 92A способен поворачивать вращающийся рычаг 91A вокруг вращающегося вала 95A, служащего в качестве оси.
[0091] Соединительный рычаг 93A представляет собой амортизатор телескопического штангообразного амортизирующего механизма. Один конец соединительного рычага 93A соединен с вращающимся рычагом 91A через шаровое соединение 97A. Другой конец соединительного рычага 93A соединен с качающимся рычагом 94A через шаровое соединение 98A. Качающийся рычаг 94A образован по существу с L-образной формой на боковом изображении таким образом, что первое плечо 100A и второе плечо 101A продолжаются из опорной части 99A. Опорная часть 99A имеет цилиндрическую форму, продолжающуюся в горизонтальном направлении, и поддерживается вращающимся валом 19A рамы 10A корпуса транспортного средства с возможностью поворота. Первое плечо 100A представляет собой штангообразный элемент, который проходит назад от внешней периферии опорной части 99A, а его конец снабжен фланцевой частью 102A, которая является плоской в вертикальном направлении. Затем, двигатель 76A заднего гусеничного движущего устройства 70A прикреплен к поверхности фланцевой части 102A на внутренней стороне транспортного средства (см. Фиг. 8). Таким образом, заднее гусеничное движущее устройство 70A соединено с концом первого плеча 100A.
[0092] Дополнительно, соединение между первым плечом 100A и задним гусеничным движущим устройством 70A не ограничено описанной выше конфигурацией. Например, может быть использована конфигурация, в которой конец первого плеча 100A прикреплен к главному корпусу двигателя 76A заднего гусеничного движущего устройства 70A. Кроме того, когда заднее гусеничное движущее устройство 70A содержит корпус редуктора по аналогии с передним гусеничным движущим устройством 30A, конец первого плеча 100A может быть прикреплен к корпусу редуктора.
[0093] Второе плечо 101A представляет собой штангообразный элемент, который проходит вниз от внешней периферии опорной части 99A, и его конец соединен с одним концом соединительного рычага 93A через шаровое соединение 98A, служащее в качестве универсального шарнира. Затем, качающийся рычаг 94A поддерживается рамой 10A корпуса транспортного средства через опорную часть 99A с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси. Кроме того, качающийся рычаг 94A соединен с задним гусеничным движущим устройством 70A посредством первого плеча 100A. Кроме того, качающийся рычаг 94A соединен с одним концом соединительного рычага 93A посредством второго плеча 101A.
[0094] Далее будет описана работа переднего устройства 50A подвески и заднего устройства 90A подвески. Дополнительно, поскольку переднее устройство 50A подвески и заднее устройство 90A подвески имеют продольно симметричную форму за исключением соединения конструкций с гусеничными движущими устройствами 30A и 70A, переднее устройство 50A подвески будет типовым образом описано ниже, а описание заднего устройства 90A подвески будет пропущено. Фиг. 14 представляет собой вид сбоку справа, иллюстрирующий рабочее состояние переднего устройства 50A подвески. Фиг. 15 представляет собой изображение в направлении XV Фиг. 14. Дополнительно, Фиг. 14 иллюстрирует состояние, когда правое переднее гусеничное движущее устройство 30AR качается вниз, а левое переднее гусеничное движущее устройство 30AL качается вверх, а описание левого соединительного рычага 53AL и левого качающегося рычага 54AL переднего устройства 50A подвески будет пропущено.
[0095] Переднее устройство 50A подвески способно качать подвешенные правое и левое передние гусеничные движущие устройства 30AR и 30AL в противоположных направлениях в вертикальном направлении взаимосвязанным образом. В состоянии Фиг. 10, когда вращающийся рычаг 51A поворачивается двигателем 52A в направлении против часовой стрелки (влево), правое переднее гусеничное движущее устройство 30AR качается вниз вокруг вращающегося вала 18A, служащего в качестве оси, а левое переднее гусеничное движущее устройство 30AL качается вверх вокруг вращающегося вала 18A, служащего в качестве оси, как проиллюстрировано на Фиг. 14 и 15.
[0096] Более конкретно, как проиллюстрировано на Фиг. 15, когда вращающийся рычаг 51A поворачивается в направлении против часовой стрелки (влево) на угол θA двигателем 52A, правый соединительный рычаг 53AR передвигается назад. Когда правый соединительный рычаг 53AR передвигается назад, второе плечо 61AR правого качающегося рычага 54AR поворачивается назад (на Фиг. 14, в направлении по часовой стрелке) вокруг вращающегося вала 18A, служащего в качестве оси. Правое второе плечо 61AR поворачивается в виде единого целого с правым первым плечом 60AR наряду с правой опорной частью 59AR. По этой причине, когда правое второе плечо 61AR поворачивается назад, правое первое плечо 60AR поворачивается вниз (на Фиг. 14, в направлении по часовой стрелке) вокруг вращающегося вала 18A, служащего в качестве оси, а правое переднее гусеничное движущее устройство 30AR качается вниз.
[0097] Между тем, когда вращающийся рычаг 51A поворачивается в направлении против часовой стрелки (влево) на угол θA двигателем 52A, левый соединительный рычаг 53AL передвигается вперед. Когда левый соединительный рычаг 53AL передвигается вперед, второе плечо 61AL левого качающегося рычага 54AL поворачивается вперед (на Фиг. 14, в направлении против часовой стрелки) вокруг вращающегося вала 18A, служащего в качестве оси. Когда левое второе плечо 61AL поворачивается вперед, левое первое плечо 60AL поворачивается вверх (на Фиг. 14, в направлении против часовой стрелки) вокруг вращающегося вала 18A, служащего в качестве оси, а левое переднее гусеничное движущее устройство 30L поворачивается вверх. Дополнительно, когда вращающийся рычаг 51A поворачивается в направлении по часовой стрелке (вправо) двигателем 52A, переднее устройство 50A подвески выполняет операцию, противоположную описанной выше операции, и, таким образом, ее описание будет пропущено.
[0098] Таким образом, подвешенные правое и левое передние гусеничные движущие устройства 30AR и 30AL качаются передним устройством 50A подвески в противоположных направлениях в вертикальном направлении взаимосвязанным образом. Это обусловлено тем, что правое и левое передние гусеничные движущие устройства 30AR и 30AL соединены друг с другом через вращающийся рычаг 51A, поддерживаемый рамой 10A корпуса транспортного средства с возможностью поворота вокруг по существу вертикального направления, служащего в качестве оси.
[0099] В данном случае переднее гусеничное движущее устройство 30A колеблется в вертикальном направлении без передвижения в горизонтальном направлении и поворота относительно продольного направления, служащего в качестве оси. Затем, контактирующая с землей часть переднего гусеничного движущего устройства 30A все время удерживается параллельно раме 10A корпуса транспортного средства и скользит в вертикальном направлении относительно рамы 10A корпуса транспортного средства. Таким образом, правое и левое передние гусеничные движущие устройства 30AR и 30AL способны быстро следовать уклону склона или изменению неровного участка неровной земли в вертикальном направлении. Соответственно, эффективность передвижения, удобство управления или комфорт во время движения становятся удовлетворительными.
[0100] Кроме того, поскольку правое и левое передние гусеничные движущие устройства 30AR и 30AL колеблются в вертикальном направлении двигателем 52A, водителю нет необходимости выполнять операцию в соответствии с перемещением массы тела или т.п. Таким образом, поскольку водитель может легко качать правое и левое передние гусеничные движущие устройства 30AR и 30AL в вертикальном направлении, уменьшается тяжесть операции управления водителем, и операция управления может выполняться комфортно и непрерывно в течение длительного периода времени.
[0101] Кроме того, переднее устройство 50A подвески выполнено с возможностью подвешивания в виде единого целого правого и левого передних гусеничных движущих устройств 30AR и 30AL на раме 10A корпуса транспортного средства. Поскольку данная конфигурация является более простой, чем конфигурация, в которой гусеничные движущие устройства подвешены независимо, а количество составных элементов уменьшается, производительность или технологичность технического обслуживания становятся удовлетворительными.
[0102] Кроме того, даже когда правое и левое передние гусеничные движущие устройства 30AR и 30AL колеблются в вертикальном направлении, чтобы следовать наклону склона, когда транспортное средство движется по склону, контактирующая с землей часть переднего гусеничного движущего устройства 30A все время удерживается параллельно раме 10A корпуса транспортного средства. Таким образом, боковая часть со стороны гребня, контактирующей с землей части переднего гусеничного движущего устройства 30A может вгрызаться в склон с использованием в то же время в качестве кромки. Например, когда транспортное средство движется по склону, при этом правая сторона самоходного транспортного средства 1A является высокой, а левая его сторона является низкой, правая часть контактирующей с землей части переднего гусеничного движущего устройства 30A может вгрызаться в склон с использованием в то же время в качестве кромки. Таким образом, переднее гусеничное движущее устройство 30A не может легко проскальзывать на склоне в боковом направлении, и, таким образом, эффективность передвижения или комфорт во время движения, когда транспортное средство движется по склону, становятся удовлетворительными.
[0103] В данном случае, как проиллюстрировано на Фиг. 9, соединительный рычаг 53A и второе плечо 61A соединены друг с другом по существу под прямым углом на боковом изображении. Таким образом, усилие, генерируемое за счет поворота вращающегося рычага 51A, может эффективно передаваться от соединительного рычага 53A в виде усилия колебания качающегося рычага 54A в вертикальном направлении (поворота вокруг вращающегося вала 18A, служащего в качестве оси) и, таким образом, тяжелое переднее гусеничное движущее устройство 30A может легко колебаться в вертикальном направлении. По этой причине двигатель 52A может быть уменьшенного размера.
[0104] Кроме того, расстояние (длина первого плеча 60A) от центра вращения опорной части 59A (линия L1A, проходящая через центр вращающегося вала 18A) до соединительной части между первым плечом 60A и передним гусеничным движущим устройством 30A длиннее, чем расстояние (длина второго плеча 61A) от центра вращения опорной части 59A (линия L1A, проходящая через центр вращающегося вала 18A) до соединительной части между вторым плечом 61A и соединительным рычагом 53A. Таким образом, даже когда величина движения соединительного рычага 53A в продольном направлении, то есть величина поворота вращающегося рычага 51A, является небольшой, величина поворота качающегося рычага 54A вокруг вращающегося вала 18A, служащего в качестве оси, может увеличиваться. То есть переднее гусеничное движущее устройство 30A может сильно качаться за счет небольшого поворота вращающегося рычага 51A, и, таким образом, переднее устройство 50A подвески может быть уменьшенного размера.
[0105] Кроме того, вращающийся вал 18A находится по существу в центре рамы 10A корпуса транспортного средства в продольном направлении, а соединительный рычаг 53A и качающийся рычаг 54A расположены с продолжением вперед от вращающегося вала 18A. То есть переднее устройство 50A подвески изогнуто в соединительной части между соединительным рычагом 53A и качающимся рычагом 54A (концом второго плеча 61A), а соединительный рычаг 53A и качающийся рычаг 54A расположены бок-о-бок на изображении сверху. Таким образом, поскольку длина переднего устройства 50A подвески в продольном направлении может быть укорочена таким образом, чтобы можно было сократить полную длину самоходного транспортного средства 1A, улучшается эффективность передвижения.
[0106] Кроме того, вращающийся вал 18A находится по существу в центре рамы 10A корпуса транспортного средства в продольном направлении. То есть опорная часть 59A поддерживается по существу центром рамы 10A корпуса транспортного средства в продольном направлении с возможностью поворота, а качающийся рычаг 54A расположен с продолжением вперед по существу от центра рамы 10A корпуса транспортного средства в продольном направлении. Таким образом, поскольку переднее устройство 50A подвески (качающийся рычаг 54A) не сильно выступает в направлении передней стороны самоходного транспортного средства 1A, а полная длина самоходного транспортного средства 1A может быть укорочена, улучшается эффективность передвижения.
[0107] Кроме того, качающийся рычаг 54A переднего устройства 50A подвески и качающийся рычаг 94A заднего устройства 90A подвески находятся по существу рядом с центром рамы 10A корпуса транспортного средства в продольном направлении и поддерживаются с возможностью поворота. По этой причине, усилие, прикладываемое со стороны переднего устройства 50A подвески и заднего устройства 90A подвески к раме 10A корпуса транспортного средства, легко концентрируется поблизости от центра. В данном случае базовая часть 11A рамы, снабженная вращающимися валами 18A и 19A, имеет продольно симметричную форму и конструкцию, аналогичную ферменной конструкции, образованной за счет усиливающих рам 20A и 21A, присоединенных поблизости от вращающихся валов 18A и 19A. То есть базовая часть 11A рамы обладает большой прочностью, поскольку эффективно укрепляется положение, в котором легко концентрируется усилие, и выравнивается прочность. Таким образом, рама 10A корпуса транспортного средства обладает достаточной прочностью и может сдерживать увеличение массы.
[0108] Кроме того, вращающийся вал 18A находится в нижней части по существу центра рамы 10A корпуса транспортного средства в продольном направлении, второе плечо 61A предоставлено с расположением вертикально вниз от опорной части 59A, а вращающийся рычаг 51A и соединительный рычаг 53A расположены под рамой 10A корпуса транспортного средства. То есть главные составные элементы переднего устройства 50A подвески расположены под рамой 10A корпуса транспортного средства. Дополнительно, качающийся рычаг 54A находится на боковой стороне рамы 10A корпуса транспортного средства. Таким образом, переднее устройство 50A подвески не занимает внутреннюю часть рамы 10A корпуса транспортного средства, внутреннее пространство рамы 10A корпуса транспортного средства может эффективно использоваться, а полная длина самоходного транспортного средства 1A может быть укорочена. По этой причине внутри рамы 10A корпуса транспортного средства могут быть расположены, например, аккумулятор и т.п.
[0109] Кроме того, правый и левый соединительные рычаги 53AR и 53AL представляют собой амортизаторы телескопических штангообразных амортизирующих механизмов, выполненных в виде цилиндров, а правое и левое передние гусеничные движущие устройства 30AR и 30AL подвешены на раме 10A корпуса транспортного средства через амортизатор. Таким образом, удар по раме 10A корпуса транспортного средства и правому и левому передним гусеничным движущим устройствам 30AR и 30AL может быть уменьшен за счет правого и левого соединительных рычагов 53AR и 53AL. По этой причине, поскольку правое и левое передние гусеничные движущие устройства 30AR и 30AL, соответственно, устойчиво контактируют с землей, улучшается эффективность передвижения или комфорт во время движения.
[0110] В данном случае колебание переднего гусеничного движущего устройства 30A в вертикальном направлении, то есть вращение двигателя 52A может выполняться в ответ на действие водителя. Однако, существует множество случаев, в которых водитель не может легко приводить в действие правое и левое передние гусеничные движущие устройства 30AR и 30AL, поворачивая их таким образом, чтобы движущие устройства следовали по склону или по неровному участку неровной земли. Таким образом, необходимо управлять двигателем 52A, служащим в качестве устройства вращения, с помощью различных датчиков и контроллера, как будет описано позже. Дополнительно, в качестве конфигурации, в которой двигатель 52A приводится в действие в ответ на действие водителя, поблизости от ручки 117А акселератора рукоятки 116A рычага предоставлено, например, рабочее устройство, а двигатель 52A приводится в действие в ответ на приведение водителем в действие рабочего устройства. В качестве рабочего устройства может использоваться, например, узел переключателя, такой как рычажный переключатель или кнопочный переключатель. С подобной конфигурацией, поскольку водитель может приводить в действие рабочее устройство посредством захвата ручки 117А акселератора, операция передвижения самоходного транспортного средства 1A и работа рабочего устройства может выполняться в одно и то же время и, таким образом, безопасность и удобство управления становятся удовлетворительными. Дополнительно, рабочее устройство не имеет особых ограничений. Желательны конфигурация и расположение, при которых рабочее устройство может приводиться в действие в то время, как водитель выполняет операцию передвижения самоходного транспортного средства 1A.
[0111] Далее будут описаны операция передвижения и операция управления самоходным транспортным средством 1A. Как описано выше, передние и задние гусеничные движущие устройства 30A и 70A приводятся в действие в то время, как ведущие колеса 31A и 71A вращаются двигателями 36A и 76A. По этой причине, когда передние и задние гусеничные движущие устройства 30A и 70A приводятся в действие, самоходное транспортное средство 1A может передвигаться вперед и назад. Кроме того, самоходным транспортным средством 1A можно управлять, когда с помощью устройства рулевого управления (не проиллюстрировано) правое и левое передние гусеничные движущие устройства 30AR и 30AL качаются взаимосвязанным образом в горизонтальном направлении относительно рамы 10A корпуса транспортного средства. По этой причине, когда передними и задними гусеничными движущими устройствами 30A и 70A или устройством рулевого управления управляет контроллер CA, выполняются операция передвижения и операция управления самоходным транспортным средством 1A.
[0112] Более конкретно, операция управления выполняется посредством управления устройством рулевого управления на основании выявленного значения датчика рукояти, выявляющего угол поворота вала 115A рулевого управления, а управление передними и задними гусеничными движущими устройствами 30A и 70A происходит на основании выявленного значения датчика ручки акселератора, выявляющего угол поворота ручки 117А акселератора.
[0113] Дополнительно, в описанной выше конфигурации управление передними и задними гусеничными движущими устройствами 30A и 70A происходит на основании выявленного значения датчика ручки акселератора, соответствующего величине воздействия водителя на ручку 117А акселератора, но изобретение не ограничено данной конфигурацией. Может быть использована конфигурация, в которой управление передними и задними гусеничными движущими устройствами 30A и 70A происходит на основании выявленного значения датчика ручки акселератора, соответствующего по меньшей мере величине воздействия водителя. Например, управление передними и задними гусеничными движущими устройствами 30A и 70A может происходить на основании выявленного значения датчика рукояти и выявления значения датчика ручки акселератора. То есть гусеничные движущие устройства 30AR, 30AL, 70AR и 70AL могут приводиться в действие с различной скоростью в состоянии передвижения с поворотом. С подобной конфигурацией самоходное транспортное средство 1A может выполнять операцию передвижения с поворотом с учетом разницы радиуса поворота внутренних движущих устройств и, таким образом, может плавно поворачивать в состоянии передвижения. Кроме того, как проиллюстрировано на Фиг. 16, может быть использована конфигурация, в которой предоставлены различные датчики, выявляющие состояние при передвижении самоходного транспортного средства 1A, а управление транспортным средством происходит на основании выявленных значений различных датчиков. Дополнительно, может быть использована конфигурация, в которой вал 115A рулевого управления и устройство рулевого управления соединены друг с другом взаимосвязанным образом, и устройство рулевого управления приводится в действие в ответ на приведение в действие вала 115A рулевого управления.
[0114] Датчик, выявляющий состояние при передвижении самоходного транспортного средства 1A, представляет собой датчик S1A угла, который выявляет угол поворота вращающегося рычага 51A переднего устройства 50A подвески относительно рамы 10A корпуса транспортного средства, датчик S2A угла, который выявляет угол поворота качающегося рычага 54A переднего устройства 50A подвески относительно рамы 10A корпуса транспортного средства, датчик S3A угла, который выявляет угол поворота вращающегося рычага 91A заднего устройства 90A подвески относительно рамы 10A корпуса транспортного средства, датчик S4A угла, который выявляет угол поворота качающегося рычага 94A заднего устройства 90A подвески относительно рамы 10A корпуса транспортного средства, датчик S5A вращения гусеницы, который выявляет число оборотов ведущих колес 31A и 71A передних и задних гусеничных движущих устройств 30A и 70A, датчик S6A крутящего момента, который выявляет крутящие моменты на выходных валах двигателей 36A и 76A передних и задних гусеничных движущих устройств 30A и 70A, датчик S7A наклона, который выявляет угол наклона рамы 10A корпуса транспортного средства относительно горизонтальной плоскости, и т.п. Затем, контроллер CA управляет гусеничными движущими устройствами 30AR, 30AL, 70AR и 70AL и двигателями 52A и 92A, служащими в качестве вращающих устройств, на основании выявленных значений различных датчиков, а также датчика S8A рукояти и датчика S9A ручки акселератора.
[0115] В данном случае контроллер CA может рассчитать состояние (положение) колебания каждого из гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL в вертикальном направлении относительно рамы 10A корпуса транспортного средства на основании углов поворота датчиков S1A-S4A углов. Таким образом, состояние колебания в вертикальном направлении (положение в вертикальном направлении) каждого из гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL относительно рамы 10A корпуса транспортного средства может быть выявлено посредством выявленных значений (углов поворота) датчиков S1A-S4A углов. Кроме того, состояние контакта с землей (дорожное состояние) каждого из гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL может быть выявлено посредством датчика S5A вращения гусеницы и датчика S6A крутящего момента. Кроме того, посредством датчика S7A наклона может быть выявлен угол наклона самоходного транспортного средства 1A относительно горизонтальной плоскости, то есть положение самоходного транспортного средства 1A при движении. Кроме того, посредством датчика S8A рукояти и датчика S9A ручки акселератора может выявляться управление водителем передвижением.
[0116] Таким образом, с помощью различных датчиков может подробно проверяться состояние при передвижении самоходного транспортного средства 1A. По этой причине эффективность передвижения самоходного транспортного средства 1A улучшается, поскольку контроллер CA может управлять гусеничными движущими устройствами 30AR, 30AL, 70AR и 70AL в ответ на состояние при передвижении самоходного транспортного средства 1A за счет приведения водителем в действие рукояти и акселератора. Кроме того, когда управление двигателями 52A и 92A, служащими в качестве вращающих устройств, происходит на основании выявленных значений датчиков S1A-S4A углов или выявленных значений датчиков S1A-S4A углов и датчика S7A наклона, рама 10A корпуса транспортного средства может удерживаться горизонтально, и, таким образом, улучшается эффективность передвижения или комфорт во время движения по неровной земле.
[0117] Дополнительно, тип различных датчиков не имеет особых ограничений. Например, для выявления угла поворота используют потенциометр или кодовый датчик. В качестве датчика S7A наклона используют гиродатчик. Дополнительно, для выявления по меньшей мере угла крена в качестве наклона в горизонтальном направлении может использоваться датчик S7A наклона, который может также использоваться для выявления угла продольного наклона в качестве наклона в продольном направлении. С подобной конфигурацией угол наклона самоходного транспортного средства 1A относительно горизонтальной плоскости может проверяться более подробно, и, таким образом, может быть улучшена эффективность передвижения и устойчивость самоходного транспортного средства 1A.
[0118] Кроме того, контроллер CA может периодически сохранять выявленные значения различных датчиков и может управлять устройствами на основании выявленных значений различных датчиков и изменять их величины. Например, контроллер CA может быть выполнен с возможностью расчета состояния колебания в вертикальном направлении (положения в вертикальном направлении) каждого из гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL относительно рамы 10A корпуса транспортного средства на основании выявленных значений датчиков S1A-S4A углов и с возможностью расчета скорости колебания (скорости в вертикальном направлении) каждого из гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL на основании периодического изменения смещения при колебании. С подобной конфигурацией состояния колебания гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL могут проверяться по смещению при колебании и скорости колебания. Таким образом, поскольку подробное состояние при передвижении самоходного транспортного средства 1A может проверяться, эффективность передвижения самоходного транспортного средства 1A улучшается.
[0119] Кроме того, конфигурации различных датчиков для проверки состояния передвижения не имеют особых ограничений. Например, датчиком для выявления состояния колебания каждого из гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL в вертикальном направлении может быть датчик, который выявляет расстояние между рамой 10A корпуса транспортного средства и землей. В связи с этим может использоваться выявляющий расстояние датчик, ультразвуковой датчик расстояния или инфракрасный датчик расстояния. Дополнительно, желательно, чтобы датчик для выявления состояния колебания мог быть выполнен в виде датчиков S1A-S4A углов. В данном случае состояние колебания в вертикальном направлении каждого из гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL может проверяться по сравнению с датчиком расстояния с высокой точностью.
[0120] Кроме того, на раме 10A корпуса транспортного средства или на каждом из гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL может быть предоставлен датчик ускорения. С подобной конфигурацией состояние при передвижении самоходного транспортного средства 1A может выявляться с более высокой точностью.
[0121] Кроме того, могут быть предоставлены различные датчики, и количество датчиков не ограничено. Например, датчики S1A-S4A углов, каждый из которых служит в качестве датчика колебания, выявляющего состояние колебания в вертикальном направлении каждого из гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL относительно рамы 10A корпуса транспортного средства, могут представлять собой конфигурацию, содержащую S1A и S3A, или конфигурацию, содержащую S2A и S4A. Дополнительно, могут быть предоставлены различные датчики. С подобной конфигурацией состояние при передвижении самоходного транспортного средства 1A может проверяться с более высокой точностью.
[0122] Кроме того, расположение различных датчиков не имеет особых ограничений. Например, желательно прикреплять датчики S1A-S4A углов к раме 10A корпуса транспортного средства. С подобной конфигурацией на многожильный кабель, соединенный с датчиками S1A-S4A углов, не влияет вращение вращающихся рычагов 51A и 91A или колебание качающихся рычагов 54A и 94A. Соответственно, может быть предотвращено отсоединение кабеля, и легко монтировать многожильный кабель. Желательно, чтобы датчик S7A наклона был расположен в центре самоходного транспортного средства 1A в направлении по ширине. Более желательно, чтобы датчик наклона был предоставлен в центре самоходного транспортного средства 1A в продольном направлении или в передней и задней частях самоходного транспортного средства 1A. То есть желательно, чтобы датчик S7A наклона был предоставлен в центре самоходного транспортного средства 1A в продольном направлении, или желательно, чтобы он был предоставлен, чтобы соответствовать каждому из переднего устройства 50A подвески и заднего устройства 90A подвески. В случае, когда датчик S7A наклона предоставлен в центре самоходного транспортного средства 1A в продольном направлении, угол наклона самоходного транспортного средства 1A относительно горизонтальной плоскости (положение при движении самоходного транспортного средства 1A) может эффективно выявляться одним датчиком S7A наклона. Кроме того, когда датчик S7A наклона предоставлен, чтобы соответствовать каждому из переднего устройства 50A подвески и заднего устройства 90A подвески, угол наклона самоходного транспортного средства 1A относительно горизонтальной плоскости (положение при движении самоходного транспортного средства 1A) может выявляться с более высокой точностью.
[0123] Кроме того, может предоставляться устройство предупреждения, которым управляет контроллер CA на основании выявленных значений различных датчиков. Например, может предоставляться устройство предупреждения, которым управляют на основании выявленного значения датчика S7A наклона. С подобной конфигурацией можно упреждать склон, который неожиданно появляется, когда водитель ведет транспортное средство, и, таким образом, предотвращать ситуацию, в которой легко возникают боковое скольжение и переворот. Соответственно, дополнительно улучшается безопасность. Дополнительно, устройство предупреждения не имеет особых ограничений и может использоваться для предупреждения водителя. Например, устройство предупреждения может предупреждать водителя с помощью звука или света. Кроме того, может использоваться генерирующее предупреждающий звук устройство или устройство с мигающей лампой. Кроме того, устройством предупреждения может быть устройство аварийной остановки, которое останавливает передние и задние гусеничные движущие устройства 30A и 70A.
[0124] Кроме того, управление движением самоходного транспортного средства 1A с использованием контроллера CA не ограничено описанной выше управляющей конфигурацией. Например, может предоставляться управление включением/выключением, которое приводит в действие двигатели 52A и 92A, служащие в качестве вращающих устройств, на основании угла крена в виде наклона самоходного транспортного средства 1A в горизонтальном направлении, обнаруженного датчиком S7A наклона, или смещений при колебаниях гусеничных движущих устройств 30AR, 30AL, 70AR и 70AL, обнаруженных датчиками S1A-S4A углов. То есть может предоставляться управление включением/выключением, которое приводит в действие двигатели 52A и 92A в ответ на состояние при передвижении.
[0125] С подобной управляющей конфигурацией, например, транспортное средство движется с прекращением приведения в действие двигателей 52A и 92A, когда неровный участок или уклон проезжей дороги меньше, чем предварительно определенное значение, и транспортное средство движется с приведением в действие двигателей 52A и 92A, когда неровный участок или уклон больше, чем предварительно определенное значение. Поскольку время приведения в действие двигателей 52A и 92A в состоянии передвижения уменьшается, самоходное транспортное средство 1A может двигаться с большой эффективностью использования энергии. Дополнительно, управление включением/выключением для приведения в движение двигателей 52A и 92A не ограничено управлением с использованием контроллера CA и может выполняться в ответ на действие водителя.
[0126] Дополнительно, переднее устройство 50A подвески не ограничено описанной выше конфигурацией, но может содержать вращающийся рычаг 51A, который проходит в горизонтальном направлении и поддерживается рамой 10A корпуса транспортного средства с возможностью поворота в центре вращающегося рычага в горизонтальном направлении, правый качающийся рычаг 54AR, который поддерживается рамой 10A корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и конец которого соединен с правым передним гусеничным движущим устройством 30AR, левый качающийся рычаг 54AL, который поддерживается рамой 10A корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и конец которого соединен с левым передним гусеничным движущим устройством 30AL, правый соединительный рычаг 53AR, один конец которого соединен с правым концом вращающегося рычага 51A, а другой конец соединен с правым качающимся рычагом 54AR, и левый соединительный рычаг 53AL, один конец которого соединен с левым концом вращающегося рычага 51A, а другой конец соединен с левым качающимся рычагом 54AL.
[0127] Например, второе плечо 61A качающегося рычага 54A переднего устройства 50A подвески проходит вниз от опорной части 59A, но может продолжаться вверх. С подобной конфигурацией второе плечо 61A не выступает в направлении нижней стороны рамы 10A корпуса транспортного средства. Соответственно, можно предотвратить контакт второго плеча 61A с препятствием в состоянии передвижения. Кроме того, поскольку можно опустить центр тяжести за счет уменьшения высоты самоходного транспортного средства 1A, улучшается эффективность передвижения. Дополнительно, когда требуется опустить центр тяжести, необходимо, чтобы тяжелый аккумулятор или топливный бак находился в нижней части рамы 10A корпуса транспортного средства. Дополнительно, описанный выше эффект получается даже в заднем устройстве 90A подвески по аналогии с передним устройством 50A подвески.
[0128] В данном случае амортизирующий механизм не ограничен амортизатором, выполненным в виде цилиндра или т.п. Может быть использована любая конструкция, способная уменьшить удар. Например, может быть использована конструкция, полученная за счет комбинации пружины и цилиндра.
[0129] Кроме того, переднее и заднее устройства 50A и 90A подвески могут не содержать двигатели 52A и 92A, служащие в качестве вращающих устройств. В случае подобной конфигурации, когда водитель наклоняет раму 10A корпуса транспортного средства в любую из правой и левой сторон, передние и задние гусеничные движущие устройства 30A и 70A могут колебаться в вертикальном направлении. Например, когда водитель передвигает массу тела вправо таким образом, чтобы рама 10A корпуса транспортного средства наклонялась вправо, правые переднее и заднее гусеничные движущие устройства 30AR и 70AR качаются вверх, а левые переднее и заднее гусеничные движущие устройства 30AL и 70AL качаются вниз.
[0130] Таким образом, когда транспортное средство движется по склону, самоходное транспортное средство 1A наклоняется в направлении стороны гребня склона таким образом, чтобы рама 10A корпуса транспортного средства оставалась по существу горизонтальной. Соответственно, боковая часть со стороны гребня, контактирующей с землей части переднего гусеничного движущего устройства 30A и боковая часть со стороны гребня, контактирующей с землей части заднего гусеничного движущего устройства 70A могут вгрызаться в склон с использованием в то же время в качестве кромки. По этой причине, поскольку на склоне вряд ли возникнет боковое скольжение передних и задних гусеничных движущих устройств 30A и 70A, эффективность передвижения или комфорт во время движения, когда транспортное средство движется по склону, являются удовлетворительными.
[0131] В этот момент, в случае подобной конфигурации, водитель обычно сдвигает массу тела в горизонтальном направлении, чтобы использовать равновесие рамы 10A корпуса транспортного средства в горизонтальном направлении в состоянии передвижения. Таким образом, когда принимают в расчет удобство управления для продолжительной операции передвижения в течение длительного периода времени, требуется конфигурация, содержащая двигатели 52A и 92A, служащие в качестве вращающих устройств. Соответственно, водитель может вести транспортное средство более комфортно в течение длительного периода времени.
[0132] Кроме того, самоходное транспортное средство 1A согласно варианту осуществления не ограничено конфигурацией, в которой в состоянии передвижения используют четыре передние, задние, правые и левы гусеничных движущих устройства 30AR, 30AL, 70AR и 70AL. Можно использовать по меньшей мере пару правых и левых движущих устройств. Например, в данном случае, хотя не проиллюстрировано на чертежах, может использоваться самоходное транспортное средство, в котором предоставлено только одно из задних гусеничных движущих устройств 70AR и 70AL самоходного транспортного средства 1A. В самоходном транспортном средстве одно заднее гусеничное движущее устройство 70A расположено в центре задней части рамы 10A корпуса транспортного средства в горизонтальном направлении самоходного транспортного средства 1A, и транспортное средство передвигается тремя гусеничными движущими устройствами. Устройство подвески заднего гусеничного движущего устройства 70A самоходного транспортного средства не имеет особых ограничений. Однако, желательно, чтобы заднее гусеничное движущее устройство было подвешено на раме 10A корпуса транспортного средства с помощью устройства подвески с возможностью сильных колебаний в вертикальном направлении. Например, заднее гусеничное движущее устройство 70A может быть подвешено посредством толкающего рычага, один конец которого соединен с рамой 10A корпуса транспортного средства с возможностью поворота относительно горизонтального направления, служащего в качестве оси, а другой конец соединен с задним гусеничным движущим устройством 70A. С подобной конфигурацией транспортное средство может устойчиво двигаться по склону или по неровной земле даже в случае трех движущих устройств. Кроме того, может быть уменьшено количество составных элементов, и, таким образом, улучшаются производительность и технологичность технического обслуживания.
[0133] Кроме того, самоходным транспортным средством согласно варианту осуществления может быть самоходное транспортное средство 1B, проиллюстрированное на Фиг. 17-19. Фиг. 17 представляет собой вид сбоку справа, иллюстрирующий пример самоходного транспортного средства 1B согласно еще одному варианту осуществления, Фиг. 18 представляет собой вид сбоку справа, иллюстрирующий раму 10B корпуса самоходного транспортного средства 1B Фиг. 17, а Фиг. 19 представляет собой вид в перспективе, иллюстрирующий раму 10B корпуса транспортного средства Фиг. 18, если смотреть сверху по диагонали вперед. Дополнительно, самоходное транспортное средство 1B согласно еще одному варианту осуществления отличается от самоходного транспортного средства 1A тем, что отличаются рама 10A корпуса транспортного средства, переднее и заднее устройства 50A и 90A подвески и т.п. Затем, составные элементы, такие же как составные элементы самоходного транспортного средства 1A будут обозначаться такими же ссылочными обозначениями, а их описание будет соответствующим образом пропущено.
[0134] Как проиллюстрировано на Фиг. 17-19, самоходное транспортное средство 1B содержит раму 10B корпуса транспортного средства, передние гусеничные движущие устройства 30A, которые служат в качестве пары из правого и левого движущих устройств, предоставленных в передней части рамы корпуса транспортного средства, переднее устройство 50B подвески, которое подвешивает пару из правого и левого передних гусеничных движущих устройств 30A на раме 10B корпуса транспортного средства, задние гусеничные движущие устройства 70A, которые служат в качестве пары из правого и левого движущих устройств, предоставленных в задней части рамы корпуса транспортного средства, и заднее устройство 90B подвески, которое подвешивает пару из правого и левого задних гусеничных движущих устройств 70A на раме 10B корпуса транспортного средства. Кроме того, самоходное транспортное средство 1B также содержит аккумулятор BB, который хранит электричество, контроллер CB, который содержит вычислительный блок и блок хранения и управляет устройствами внутри рамы 10B корпуса транспортного средства.
[0135] Кроме того, самоходное транспортное средство 1B содержит оболочку 110B главного корпуса, которая содержит передние крылья 111B, задние крылья 112B и т.п., водительское сиденье 113B, рукоять 114B, которая содержит вал 115B рулевого управления, рукояточный руль 116B, ручку 117B акселератора и т.п., датчик рукояти (не проиллюстрировано), датчик ручки акселератора (не проиллюстрировано), правую и левую подножки 118B и т.п. Аккумулятор BB, контроллер CB, оболочка 110B главного корпуса, передние крылья 111B, задние крылья 112B, водительское сиденье 113B, рукоять 114B, вал 115B рулевого управления, рукояточный руль 116B, ручка 117B акселератора, датчик рукояти, датчик ручки акселератора и правая и левая подножки 118B соответствуют аккумулятору BA, контроллеру CA, оболочке 110A главного корпуса, передним крыльям 111A, задним крыльям 112A, водительскому сиденью 113A, рукояти 114A, валу 115A рулевого управления, рукояточному рулю 116A, ручке 117А акселератора, датчику рукояти, датчику ручки акселератора и правой и левой подножкам 118A самоходного транспортного средства 1A. По этой причине описание данных конфигураций будет пропущено.
[0136] Далее будет описана рама 10B корпуса транспортного средства. Дополнительно, поскольку рама 10B корпуса транспортного средства имеет горизонтальную симметричную форму, при необходимости правый составной элемент будет соответствующим образом обозначаться ссылочным обозначением R, а левый составной элемент будет соответствующим образом обозначаться ссылочным обозначением L. Дополнительно, рама 10B корпуса транспортного средства отличается от рамы 10A корпуса самоходного транспортного средства 1A тем, что переднее и заднее устройства 50A и 90A подвески прикреплены иным образом.
[0137] Как проиллюстрировано на Фиг. 18 и 19, рама 10B корпуса транспортного средства получается за счет соединения множества стальных элементов посредством сварки или т.п. Стальной элемент представляет собой цилиндрическую трубу или листообразную пластину. Рама 10B корпуса транспортного средства содержит базовую часть 11B рамы, которая проходит в продольном направлении и имеет нижнюю часть, образованную с формой лодочного дна, переднюю часть 12B рамы, которая проходит вверх от передней части базовой части 11B рамы, заднюю часть 13B рамы, которая проходит вверх от задней части базовой части 11B рамы, и т.п.
[0138] Базовая часть 11B рамы составляет главную часть рамы 10B корпуса транспортного средства и используется для прикрепления переднего устройства 50B подвески, заднего устройства 90B подвески и т.п., как будет описано позже. Базовая часть 11B рамы содержит пару правой и левой главных рам 14B (14BR, 14BL), которая проходит в продольном направлении, пару правой и левой нижних рам 15B (15BR, 15BL), множество усиливающих рам 16B, 17B, 24B и 25B и т.п.
[0139] Передние концы правой и левой главных рам 14BR и 14BL соединены друг с другом с помощью усиливающей рамы 16B, продолжающейся в горизонтальном направлении. Кроме того, задние концы правой и левой главных рам 14BR и 14BL соединены друг с другом с помощью усиливающей рамы 17B, продолжающейся в горизонтальном направлении.
[0140] Правая и левая нижние рамы 15BR и 15BL расположены под правой и левой главными рамами 14BR и 14BL, соответственно, и снабжены продолжением в продольном направлении, по существу параллельном правой и левой главным рамам 14BR и 14BL. Оба конца правой и левой нижних рам 15BR и 15BL, соответственно, наклонены вверх для соединения с правой и левой главными рамами 14BR и 14BL.
[0141] Два вращающихся вала 18B и 19B, продолжающихся в горизонтальном направлении, расположены между центральными частями правой и левой нижних рам 15BR и 15BL. Вращающиеся валы 18B и 19B отделены друг от друга в продольном направлении предварительно определенным зазором, с параллельным расположением друг с другом, а оба конца их выступают в направлении внешней стороны нижних рам 15BR и 15BL. По этой причине вращающиеся валы 18B и 19B используют для соединения переднего устройства 50B подвески и заднего устройства 90B подвески, как будет описано позже, с рамой 10B корпуса транспортного средства.
[0142] Кроме того, вращающиеся валы 18B и 19B между правой и левой нижними рамами 15BR и 15BL образованы таким образом, чтобы иметь диаметры больше, чем диаметры, например, главной рамы 14B или нижней рамы 15B. Таким образом, вращающиеся валы 18B и 19B повышают жесткость рамы 10B корпуса транспортного средства за счет жесткого соединения правой и левой нижних рам 15BR и 15BL.
[0143] На передней стороне вращающегося вала 18B и задней стороне вращающегося вала 19B предоставлены оси 20B коромысел и 21B, продолжающиеся в горизонтальном направлении с параллельным расположением с вращающимися валами 18B и 19B. Оба конца осей 20B и 21B коромысел прикреплены, соответственно, к правой и левой нижним рамам 15BR и 15BL. По этой причине оси 20B и 21B коромысел используют для поддержки с возможностью вращения коромысел 212B и 232B, как будет описано позже.
[0144] В положении, соответствующем передним концам правой и левой главных рам 14BR и 14BL, и вблизи от соединительных частей передних концов правой и левой нижних рам 15BR и 15BL предоставлен опорный вал 22B, который проходит в горизонтальном направлении с параллельным расположением с вращающимися валами 18B и 19B. Оба конца опорного вала 22B прикреплены, соответственно, к правой и левой главным рамам 14BR и 14BL. Между тем, в положении, соответствующем задним концам правой и левой главных рам 14BR и 14BL, и вблизи от соединительных частей задних концов правой и левой нижних рам 15BR и 15BL предоставлен опорный вал 23, который проходит в горизонтальном направлении с параллельным расположением с вращающимися валами 18B и 19B. Оба конца опорного вала 23B прикреплены, соответственно, к правой и левой главным рамам 14BR и 14BL. По этой причине опорные валы 22B и 23B используют для поддержки с возможностью вращения корпусов 200B и 220B двигателей, служащих в качестве качающихся опорных частей, как будет описано позже.
[0145] Между правой главной рамой 14BR и правой нижней рамой 15BR и между левой главной рамой 14BL и левой нижней рамой 15BL предоставлены, соответственно, две усиливающие рамы 24B и 25B. Более конкретно, усиливающая рама 24B проходит вверх и назад из области соединительной части между вращающимся валом 18B и нижней рамой 15B, подлежащей соединению по существу с центром главной рамы 14B в продольном направлении. Усиливающая рама 25B проходит вверх и вперед из области соединительной части между вращающимся валом 19B и нижней рамой 15B, подлежащей соединению по существу с центром главной рамы 14B в продольном направлении. По этой причине за счет усиливающих рам 24B и 25B улучшается прочность поблизости от мест расположения вращающихся валов 18B и 19B.
[0146] Дополнительно, базовая часть 11B рамы имеет продольно симметричную форму. По этой причине два вращающихся вала 18B и 19B, две оси 20B и 21B коромысел и два опорных вала 22B и 23B расположены, соответственно, в продольно симметричных положениях. Кроме того, на боковом изображении базовая часть 11B рамы снабжена ферменной конструкцией, образованной главной рамой 14B, нижней рамой 15B и усиливающими рамами 24B и 25B. Таким образом, базовая часть 11B рамы обладает большой прочностью, поскольку эффективно усиливается область вращающихся валов 18B и 19B, и выравнивается прочность.
[0147] Передняя часть 12B рамы образована множеством цилиндрических стальных элементов и имеет по существу прямоугольную форму, наклоненную таким образом, что на боковом изображении передняя часть является высокой, а задняя часть является низкой. Передняя часть 12B рамы используется для поддержки с возможностью вращения рукояти 114B (не проиллюстрировано). В верхней части передней части 12B рамы предоставлена передняя труба 26B. Передняя труба 26B представляет собой цилиндрическую трубу, имеющую отверстие, образованное на обоих ее концах, и расположена таким образом, что передняя часть является низкой, а задняя часть является высокой. Дополнительно, передняя труба 26B находится в центре рамы 10B корпуса транспортного средства в горизонтальном направлении. По этой причине вал 115B рулевого управления вставляют в переднюю трубу 26B сверху таким образом, что рукоять 114B поддерживается с возможностью поворота. Кроме того, передняя часть 12B рамы вмещает различные устройства, такие как аккумулятор BB (не проиллюстрировано).
[0148] Задняя часть 13B рамы образована множеством цилиндрических стальных элементов и имеет по существу кубическую форму. Водительское сиденье 113B (не проиллюстрировано) прикреплено к верхней части задней части 13B рамы. Кроме того, внутри задней части 13B рамы размещены различные устройства, такие как аккумулятор BB (не проиллюстрировано).
[0149] Дополнительно, рама 10B корпуса транспортного средства не ограничена описанной выше конфигурацией. Рама 10B корпуса транспортного средства может использоваться для прикрепления переднего устройства 50B подвески и заднего устройства 90B подвески и имеет достаточную жесткость для самоходного транспортного средства. Например, вместо цилиндрической трубы рама 10B корпуса транспортного средства может быть образована полым квадратным столбчатым элементом или стальным элементом, имеющим L-образное или H-образное поперечное сечение. Кроме того, может быть использована конфигурация, в которой поперек рамы натянут листообразный элемент для того, чтобы улучшить прочность или чтобы разместить различные устройства.
[0150] Далее будет описано переднее устройство 50B подвески. Дополнительно, поскольку переднее устройство 50B подвески имеет горизонтальную симметричную форму, при необходимости правый составной элемент будет соответствующим образом обозначаться ссылочным обозначением R, а левый составной элемент будет соответствующим образом обозначаться ссылочным обозначением L. Фиг. 20 представляет собой вид сбоку справа, иллюстрирующий переднее устройство 50B подвески. Фиг. 21 представляет собой изображение в направлении XXI Фиг. 20. Фиг. 22 представляет собой вид в перспективе, иллюстрирующий переднее устройство 50B подвески, если смотреть снизу по диагонали вперед.
[0151] Как проиллюстрировано на Фиг. 20-22, переднее устройство 50B подвески содержит вращающийся рычаг 51B, двигатель 52B, который служит в качестве устройства вращения, поворачивающего вращающийся рычаг 51B, корпус 200B двигателя, который служит в качестве качающейся опорной части, пару из правого и левого соединительных рычагов 53B (53BR, 53BL), пару из правого и левого качающихся рычагов 54B (54BR, 54BL), амортизатор 210B, который служит в качестве амортизирующего механизма, и т.п. Дополнительно, на Фиг. 22 описание рамы 10B корпуса транспортного средства пропущено. Кроме того, на Фиг. 20-22, линия L1B представляет собой линию, проходящую через центр вращающегося вала 18B, линия L2B представляет собой линию, проходящую через центр поворота вращающегося рычага 51B, линия L3B представляет собой линию, проходящую через центр опорного вала 22B, а линия L4B представляет собой линию, проходящую через центр оси 20B коромысла. В данном случае вращающийся рычаг 51B, двигатель 52B, пара из правого и левого соединительных рычагов 53B и пара из правого и левого качающихся рычагов 54B соответствуют вращающемуся рычагу 51A, двигателю 52A, паре правого и левого соединительных рычагов 53A и паре правого и левого качающихся рычагов 54A переднего устройства 50A подвески самоходного транспортного средства 1A. Соответственно, описание одинаковой конфигурации будет соответствующим образом пропущено.
[0152] Корпус 200B двигателя представляет собой корпус, имеющий по существу цилиндрическую форму с квадратной нижней частью, который содержит по существу квадратную нижнюю стенку 201B и четыре боковые стенки 202B. Нижняя поверхность нижней стенки 201B снабжена кронштейном 203B, который имеет U-образную форму на боковом изображении. Кронштейн 203B содержит нижнюю стенку 204B и переднюю и заднюю боковые стенки 205B и 206B, причем верхние концы передней и задней боковых стенок 205B и 206B прикреплены к нижней стенке 201B.
[0153] Двигатель 52B вставляют в корпус 200B двигателя сверху, при этом ведущий вал (не проиллюстрировано) направляют вниз и прикрепляют к нижней стенке 201B корпуса 200B двигателя. Правая и левая боковые стенки 202B корпуса 200B двигателя образованы таким образом, что в задней стороне верхних частей образовано сквозное отверстие 207B для проникновения верхних частей в горизонтальном направлении. Через сквозное отверстие 207B вставляют опорный вал 22B рамы 10B корпуса транспортного средства. Таким образом, корпус 200B двигателя поддерживается рамой 10B корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси (линия L3B). Дополнительно, корпус 200B двигателя расположен таким образом, что верхняя часть наклонена назад.
[0154] Вращающийся рычаг 51B представляет собой квадратный столбчатый элемент, продолжающийся в горизонтальном направлении, который содержит вращающийся вал 55B, расположенный в центре в горизонтальном направлении. Между нижней стенкой 201B корпуса 200B двигателя и нижней стенкой 204B кронштейна 203B находится вращающийся рычаг 51B, который поддерживается нижней стенкой 204B кронштейна 203B с возможностью поворота вокруг вращающегося вала 55B, служащего в качестве оси. То есть вращающийся рычаг 51B поддерживается корпусом 200B двигателя с возможностью поворота относительно по существу вертикального направления, служащего в качестве оси (линия L2B). Дополнительно, вращающийся вал 55B расположен перпендикулярно нижней стенке 201B корпуса 200B двигателя, а вращающийся вал 55B наклонен в продольном направлении.
[0155] Кроме того, нижняя стенка 201B корпуса 200B двигателя содержит сквозное отверстие (не проиллюстрировано), а ведущий вал двигателя 52B соединен с вращающимся валом 55B вращающегося рычага 51B через изменяющее скорость устройство (не проиллюстрировано), содержащее шестерни и т.п. По этой причине двигатель 52B способен поворачивать вращающийся рычаг 51B вокруг вращающегося вала 55B, служащего в качестве оси.
[0156] В данном случае корпус 200B двигателя, служащий в качестве качающейся опорной части, не ограничен описанной выше конфигурацией. Корпус 200B двигателя может поддерживаться рамой 10B корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси. Например, также может использоваться имеющий цилиндрическую нижнюю часть корпус. Кроме того, корпус 200B двигателя и кронштейн 203B могут быть объединены друг с другом.
[0157] Кроме того, вращающийся рычаг 51B не ограничен описанной выше конфигурацией. Вращающийся рычаг 51B может продолжаться в горизонтальном направлении и может поддерживаться корпусом 200B двигателя, служащим в качестве качающейся опорной части с возможностью поворота в центре вращения в горизонтальном направлении. Например, также может использоваться столбчатый элемент, продолжающийся в горизонтальном направлении.
[0158] Кроме того, соединение между вращающимся рычагом 51B и ведущим валом двигателя 52B не имеет особых ограничений, но вращающийся вал 55B и ведущий вал двигателя 52B могут быть соединены непосредственно друг с другом.
[0159] В данном случае двигатель 52B представляет собой электрический двигатель, который приводится в действие за счет электрической энергии аккумулятора BB и которым управляет контроллер CB. Дополнительно, устройство, которое поворачивает вращающийся рычаг 51B, может быть выполнено с возможностью поворота вращающегося рычага 51B на предварительно определенный угол в предварительно определенном направлении вращения и не ограничено электрическим двигателем. Например, по аналогии с двигателем 52A самоходного транспортного средства 1A, двигатель 52B может представлять собой гидравлический двигатель, приводимый в действие давлением текучей среды.
[0160] Соединительный рычаг 53B (53BR, 53BL) представляет собой столбчатый элемент. Один конец правого соединительного рычага 53BR соединен с правым концом вращающегося рычага 51B через шаровое соединение 57BR, служащее в качестве универсального шарнира. Другой конец правого соединительного рычага 53BR соединен с правым качающимся рычагом 54BR через шаровое соединение 58BR, служащее в качестве универсального шарнира.
[0161] По аналогии с правым соединительным рычагом 53BR, один конец левого соединительного рычага 53BL соединен с левым концом вращающегося рычага 51B через шаровое соединение 57BL, служащее в качестве универсального шарнира. Кроме того, другой конец левого соединительного рычага 53BL соединен с левым качающимся рычагом 54BL через шаровое соединение 58BL, служащее в качестве универсального шарнира. То есть соединительный рычаг 53B образован так, что один его конец соединен с вращающимся рычагом 51B через шаровое соединение 57B, а другой его конец соединен с качающимся рычагом 54B через шаровое соединение 58B.
[0162] В данном случае соединительный рычаг 53B не ограничен описанной выше конфигурацией. Соединительный рычаг 53B может быть образован так, что один его конец соединен с вращающимся рычагом 51B, а другой его конец соединен с качающимся рычагом 54B. Например, вместо шарового соединения в качестве универсального шарнира может быть выполнено соединение, использующее универсальный шарнир крестового типа.
[0163] Качающийся рычаг 54B (54BR, 54BL) содержит опорную часть 59B, первое плечо 60B, второе плечо 61B и т.п. В данном случае качающийся рычаг 54B имеет такую же конфигурацию, как у качающегося рычага 54A самоходного транспортного средства 1A. На боковом изображении качающийся рычаг 54B образован по существу с L-образной формой таким образом, что первое плечо 60B и второе плечо 61B продолжаются из опорной части 59B. Опорная часть 59B имеет цилиндрическую форму, продолжающуюся в горизонтальном направлении, и поддерживается вращающимся валом 18B рамы 10B корпуса транспортного средства с возможностью поворота. Первое плечо 60B представляет собой штангообразный элемент, который проходит вперед от внешней периферии опорной части 59B, и к его концу прикреплен вращающийся вал 62B. По этой причине по аналогии с соединением между передним гусеничным движущим устройством 30A и передним устройством 50A подвески самоходного транспортного средства 1A, переднее гусеничное движущее устройство 30A соединено с концом первого плеча 60B посредством кронштейна 40A с возможностью поворота в горизонтальном направлении относительно вертикального направления, служащего в качестве оси (вращающийся вал 62B) (см. Фиг. 5). Второе плечо 61B представляет собой штангообразный элемент, который проходит вниз от внешней периферии опорной части 59B, а его конец соединен с одним концом соединительного рычага 53B через шаровое соединение 58B, служащее в качестве универсального шарнира.
[0164] По этой причине качающийся рычаг 54B поддерживается рамой 10B корпуса транспортного средства через опорную часть 59B с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси (линия L1B). Кроме того, качающийся рычаг 54B соединен с передним гусеничным движущим устройством 30A через первое плечо 60B. В дополнение, качающийся рычаг 54B соединен с одним концом соединительного рычага 53B через второе плечо 61B.
[0165] Амортизатор 210B представляет собой телескопический штангообразный амортизирующий механизм, содержащий цилиндр и т.п., который расположен с продолжением в продольном направлении в центре рамы 10B корпуса транспортного средства в горизонтальном направлении. Один конец амортизатора 210B соединен с задней стенкой 206B кронштейна 203B с возможностью поворота относительно горизонтального направления, служащего в качестве оси. Другой конец амортизатора 210B соединен с коромыслом 212B рычажного механизма 211B. По этой причине амортизатор 210B образован так, что один его конец соединен с корпусом 200B двигателя, служащим в качестве качающейся опорной части, а другой его конец соединен с рамой 10B корпуса транспортного средства через рычажный механизм 211B.
[0166] В данном случае рычажный механизм 211B содержит коромысло 212B и пару правой и левой тяговых штанг 213B (213BR, 213BL). Верхний конец коромысла 212B поддерживается рамой 10B корпуса транспортного средства с возможностью поворота вокруг оси 20B коромысла, служащего в качестве оси (линия L4B). Другой конец амортизатора 210B соединен с нижним концом коромысла 212B с возможностью поворота относительно горизонтального направления, служащего в качестве оси.
[0167] Пара правой и левой тяговых штанг 213B (213BR, 213BL) расположена на обеих правой и левой сторонах коромысла 212B с билатерально симметричным расположением друг относительно друга. Один конец тяговой штанги 213B соединен между верхним и нижним концами коромысла 212B с возможностью поворота относительно горизонтального направления, служащего в качестве оси. Другой конец тяговой штанги 213B соединен с задней стенкой 206B кронштейна 203B с возможностью поворота относительно горизонтального направления, служащего в качестве оси. В данном случае ось вращения тяговой штанги 213B в задней стенке 206B является такой же, как ось вращения амортизатора 210B в задней стенке 206B. То есть амортизатор 210B и тяговая штанга 213B соосно соединены с задней стенкой 206B. По этой причине амортизатор 210B, который расположен, как описано выше, может уменьшать столкновение между рамой 10B корпуса транспортного средства и правым и левым передними гусеничными движущими устройствами 30AR и 30AL, но подробное их описание будет сделано ниже.
[0168] Далее будет описано заднее устройство 90B подвески. Дополнительно, поскольку заднее устройство 90B подвески имеет горизонтальную симметричную форму, при необходимости правый составной элемент будет соответствующим образом обозначаться ссылочным обозначением R, а левый составной элемент будет соответствующим образом обозначаться ссылочным обозначением L. Фиг. 23 представляет собой вид сбоку справа, иллюстрирующий заднее устройство 90B подвески. Фиг. 24 представляет собой изображение в направлении XXIV Фиг. 23.
[0169] Как проиллюстрировано на Фиг. 23 и 24, заднее устройство 90B подвески содержит вращающийся рычаг 91B, двигатель 92B, который служит в качестве устройства вращения, поворачивающего вращающийся рычаг 91B, корпус 220B двигателя, который служит в качестве качающейся опорной части, пару из правого и левого соединительных рычагов 93B (93BR, 93BL), пару из правого и левого качающихся рычагов 94B (94BR, 94BL), амортизатор 230B, который служит в качестве амортизирующего механизма, и т.п. Дополнительно, на Фиг. 23 и 24 линия L5B представляет собой линию, проходящую через центр вращающегося вала 19B, линия L6B представляет собой линию, проходящую через центр поворота вращающегося рычага 91B, линия L7B представляет собой линию, проходящую через центр опорного вала 23B, а линия L8B представляет собой линию, проходящую через центр оси 21B коромысла.
[0170] В данном случае заднее устройство 90B подвески является продольно симметричным переднему устройству 50B подвески относительно линии L1B за исключением формы качающегося рычага 94B. Соединение между качающимся рычагом 94B и задним гусеничным движущим устройством 70A отличается от соединения между передним гусеничным движущим устройством 30A и качающимся рычагом 54B переднего устройства 50B подвески, а соединение выполнено без кронштейна 40A. То есть только конец первого плеча 100B качающегося рычага 94B имеет иную форму. Соответственно, описание такой же конфигурации, как конфигурация переднего устройства 50B подвески, будет соответствующим образом пропущено.
[0171] Корпус 220B двигателя поддерживается рамой 10B корпуса транспортного средства с возможностью колебания в вертикальном направлении вокруг опорного вала 23B, служащего в качестве оси. Двигатель 92B прикреплен к корпусу 220B двигателя. Вращающийся рычаг 91B поддерживается кронштейном 223B корпуса 220B двигателя с возможностью поворота вокруг вращающегося вала 95B, служащего в качестве оси. Дополнительно, вращающийся вал 95B наклонен в продольном направлении.
[0172] Ведущий вал (не проиллюстрировано) двигателя 92B соединен с вращающимся валом 95B вращающегося рычага 91B через изменяющее скорость устройство (не проиллюстрировано), содержащее шестерни и т.п. По этой причине двигатель 92B способен поворачивать вращающийся рычаг 91B вокруг вращающегося вала 95B, служащего в качестве оси.
[0173] Один конец соединительного рычага 93B соединен с вращающимся рычагом 91B через шаровое соединение 97B. Другой конец соединительного рычага 93B соединен с качающимся рычагом 94B через шаровое соединение 98B. Дополнительно, качающийся рычаг 94B имеет такую же конфигурацию, как конфигурация качающегося рычага 94A самоходного транспортного средства 1A. На боковом изображении качающийся рычаг 94B образован по существу с L-образной формой таким образом, что первое плечо 100B и второе плечо 101B продолжаются из опорной части 99B. Опорная часть 99B имеет цилиндрическую форму, продолжающуюся в горизонтальном направлении, и поддерживается вращающимся валом 19B рамы 10B корпуса транспортного средства с возможностью поворота. Первое плечо 100B представляет собой штангообразный элемент, который проходит назад от внешней периферии опорной части 99B, а на его конце предоставлена фланцевая часть 102B, имеющая плоскую поверхность, образованную в вертикальном направлении. По этой причине по аналогии с соединением между задним гусеничным движущим устройством 70A и задним устройством 90A подвески самоходного транспортного средства 1A, двигатель 76A заднего гусеничного движущего устройства 70A прикреплен к поверхности фланцевой части 102B на внутренней стороне транспортного средства (см. Фиг. 8). Таким образом, заднее гусеничное движущее устройство 70A соединено с концом первого плеча 100B. Второе плечо 101B представляет собой штангообразный элемент, который проходит вниз от внешней периферии опорной части 99B, а его конец соединен с одним концом соединительного рычага 93B через шаровое соединение 98B, служащее в качестве универсального шарнира.
[0174] По этой причине качающийся рычаг 94B поддерживается рамой 10B корпуса транспортного средства через опорную часть 99B с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси. Кроме того, качающийся рычаг 94B соединен с задним гусеничным движущим устройством 70A через первое плечо 100B. В дополнение, качающийся рычаг 94B соединен с одним концом соединительного рычага 93B посредством второго плеча 101B.
[0175] Заднее устройство 90B подвески содержит амортизатор 230B, который уменьшает столкновение между рамой 10B корпуса транспортного средства и правым и левым задними гусеничными движущими устройствами 70AR и 70AL, и рычажный механизм 231B. Рычажный механизм 231B содержит коромысло 232B и пару правой и левой тяговых штанг 233B (233BR, 233BL). Один конец амортизатора 230B соединен с кронштейном 223B с возможностью поворота относительно горизонтального направления, служащего в качестве оси. Другой конец амортизатора 230B соединен с коромыслом 232B. Верхний конец коромысла 232B поддерживается осью 21B коромысла рамы 10B корпуса транспортного средства с возможностью поворота. Другой конец амортизатора 230B соединен с нижним концом коромысла 232B с возможностью поворота относительно горизонтального направления, служащего в качестве оси. Один конец тяговой штанги 233B соединен между верхним и нижним концами коромысла 232B с возможностью поворота относительно горизонтального направления, служащего в качестве оси. Другой конец тяговой штанги 233B соединен с кронштейном 223B с возможностью поворота относительно горизонтального направления, служащего в качестве оси. В данном случае амортизатор 230B и тяговая штанга 233B соосно соединены с кронштейном 223B.
[0176] Далее будет описана работа переднего устройства 50B подвески и заднего устройства 90B подвески. Дополнительно, поскольку переднее устройство 50B подвески и заднее устройство 90B подвески имеют продольно симметричную форму за исключением конструкции соединения с гусеничными движущими устройствами 30A и 70A, переднее устройство 50B подвески будет описано типовым образом, а описание заднего устройства 90B подвески будет пропущено. Фиг. 25 представляет собой вид сбоку справа, иллюстрирующий рабочее состояние переднего устройства 50B подвески. Фиг. 26 представляет собой изображение в направлении XXVI Фиг. 25. Дополнительно, Фиг. 25 представляет собой изображение, иллюстрирующее состояние, когда правое переднее гусеничное движущее устройство 30AR качается вниз, а левое переднее гусеничное движущее устройство 30AL качается вверх, причем описание левого соединительного рычага 53BL и левого качающегося рычага 54BL переднего устройства 50B подвески будет пропущено.
[0177] Переднее устройство 50B подвески способно качать в вертикальном направлении подвешенные правое и левое передние гусеничные движущие устройства 30AR и 30AL в противоположных направлениях. В состоянии Фиг. 21, когда вращающийся рычаг 51B поворачивается двигателем 52B в направлении против часовой стрелки (влево), правое переднее гусеничное движущее устройство 30AR качается вниз вокруг вращающегося вала 18B, служащего в качестве оси, а левое переднее гусеничное движущее устройство 30AL качается вверх вокруг вращающегося вала 18B, служащего в качестве оси, как проиллюстрировано на Фиг. 25 и 26.
[0178] Более конкретно, как проиллюстрировано на Фиг. 26, когда вращающийся рычаг 51B поворачивается двигателем 52B в направлении против часовой стрелки (влево) на угол θB, правый соединительный рычаг 53BR передвигается назад. Когда правый соединительный рычаг 53BR передвигается назад, второе плечо 61BR правого качающегося рычага 54BR поворачивается назад (на Фиг. 25 в направлении по часовой стрелке) вокруг вращающегося вала 18B, служащего в качестве оси. Правое второе плечо 61BR поворачивается в виде единого целого с правым первым плечом 60BR наряду с правой опорной частью 59BR. По этой причине, когда правое второе плечо 61BR поворачивается назад, правое первое плечо 60Br поворачивается вниз (на Фиг. 25 в направлении по часовой стрелке) вокруг вращающегося вала 18B, служащего в качестве оси, а правое переднее гусеничное движущее устройство 30AR качается вниз.
[0179] Между тем, когда вращающийся рычаг 51B поворачивается двигателем 52B в направлении против часовой стрелки (влево) на угол θB, левый соединительный рычаг 53BL передвигается вперед. Когда левый соединительный рычаг 53BL передвигается вперед, второе плечо 61BL левого качающегося рычага 54BL поворачивается вперед (на Фиг. 25 в направлении против часовой стрелки) вокруг вращающегося вала 18B, служащего в качестве оси. Когда левое второе плечо 61BL поворачивается вперед, левое первое плечо 60BL поворачивается вверх (на Фиг. 25 в направлении против часовой стрелки) вокруг вращающегося вала 18B, служащего в качестве оси, а левое переднее гусеничное движущее устройство 30AL качается вверх. Дополнительно, когда вращающийся рычаг 51B поворачивается двигателем 52B в направлении по часовой стрелке (вправо), переднее устройство 50B подвески выполняет операцию, противоположную описанной выше операции, и, таким образом, ее описание будет пропущено.
[0180] Таким образом, с помощью переднего устройства 50B подвески подвешенные правое и левое передние гусеничные движущие устройства 30AR и 30AL взаимосвязанным образом качаются в противоположных направлениях в вертикальном направлении. Это обусловлено тем, что правое и левое передние гусеничные движущие устройства 30AR и 30AL соединены друг с другом через вращающийся рычаг 51B, поддерживаемый корпусом 200B двигателя, служащим в качестве качающейся опорной части, с возможностью поворота в центре вращающегося рычага в горизонтальном направлении.
[0181] В данном случае переднее гусеничное движущее устройство 30A колеблется в вертикальном направлении без передвижения в горизонтальном направлении и поворота относительно продольного направления, служащего в качестве оси. По этой причине контактирующая с землей часть переднего гусеничного движущего устройства 30A все время удерживается параллельно раме 10B корпуса транспортного средства и скользит в вертикальном направлении относительно рамы 10B корпуса транспортного средства. Таким образом, правое и левое передние гусеничные движущие устройства 30AR и 30AL способны быстро следовать наклону склона или изменению неровного участка неровной земли в вертикальном направлении. Соответственно, эффективность передвижения, удобство управления или комфорт во время движения становятся удовлетворительными.
[0182] Кроме того, поскольку правое и левое передние гусеничные движущие устройства 30AR и 30AL качаются двигателем 52B в вертикальном направлении, водителю нет необходимости выполнять операцию в соответствии с перемещением массы тела или т.п. Таким образом, поскольку водитель может легко качать правое и левое передние гусеничные движущие устройства 30AR и 30AL в вертикальном направлении, уменьшается тяжесть операции управления водителем, и операция управления может выполняться комфортно и непрерывно в течение длительного периода времени.
[0183] Кроме того, переднее устройство 50B подвески выполнено с возможностью подвешивания на раме 10B корпуса транспортного средства правого и левого передних гусеничных движущих устройств 30AR и 30AL в виде единого целого. Поскольку данная конфигурация является более простой, чем конфигурация, в которой гусеничные движущие устройства подвешены независимо, и уменьшается количество составных элементов, производительность или технологичность технического обслуживания становятся удовлетворительными.
[0184] Кроме того, даже когда правое и левое передние гусеничные движущие устройства 30AR и 30AL колеблются в вертикальном направлении, чтобы следовать наклону склона, когда транспортное средство движется по склону, контактирующая с землей часть переднего гусеничного движущего устройства 30A все время удерживается параллельно раме 10B корпуса транспортного средства. Таким образом, боковая часть со стороны гребня, контактирующей с землей части переднего гусеничного движущего устройства 30A может вгрызаться в склон с использованием в то же время в качестве кромки. Например, когда транспортное средство движется по склону, при этом правая сторона самоходного транспортного средства 1B является высокой, а его левая сторона является низкой, правая часть контактирующей с землей части переднего гусеничного движущего устройства 30A может вгрызаться в склон с использованием в то же время в качестве кромки. Таким образом, переднее гусеничное движущее устройство 30A не может легко проскальзывать в боковом направлении на склоне, и, таким образом, эффективность передвижения или комфорт во время движения, когда транспортное средство движется по склону, становятся удовлетворительными.
[0185] В данном случае, как проиллюстрировано на боковом изображении на Фиг. 20, соединительный рычаг 53B и второе плечо 61B соединены друг с другом по существу под прямым углом. Таким образом, усилие, генерируемое за счет поворота вращающегося рычага 51B, может эффективно передаваться от соединительного рычага 53B в виде усилия колебания качающегося рычага 54B в вертикальном направлении (поворота вокруг вращающегося вала 18B, служащего в качестве оси), и, таким образом, тяжелое переднее гусеничное движущее устройство 30A может легко колебаться в вертикальном направлении. По этой причине двигатель 52B может быть уменьшенного размера.
[0186] Кроме того, расстояние (длина первого плеча 60B) от центра вращения опорной части 59B (линия L1B, проходящая через центр вращающегося вала 18B) до соединительной части между первым плечом 60B и передним гусеничным движущим устройством 30A длиннее, чем расстояние (длина второго плеча 61B) от центра вращения опорной части 59B (линия L1B, проходящая через центр вращающегося вала 18B) до соединительной части между вторым плечом 61B и соединительным рычагом 53B. Таким образом, даже когда величина движения соединительного рычага 53B в продольном направлении, то есть величина поворота вращающегося рычага 51B является небольшой, величина поворота качающегося рычага 54B вокруг вращающегося вала 18B, служащего в качестве оси, может увеличиваться. То есть переднее гусеничное движущее устройство 30A может сильно качаться за счет небольшого поворота вращающегося рычага 51B, и, таким образом, переднее устройство 50B подвески может быть уменьшенного размера.
[0187] Кроме того, вращающийся вал 18B находится по существу в центре рамы 10B корпуса транспортного средства в продольном направлении, а соединительный рычаг 53B и качающийся рычаг 54B расположены с продолжением вперед от вращающегося вала 18B. То есть переднее устройство 50B подвески изогнуто в соединительной части между соединительным рычагом 53B и качающимся рычагом 54B (конец второго плеча 61B), а соединительный рычаг 53B и качающийся рычаг 54B расположены на изображении сверху бок-о-бок. Таким образом, поскольку длина переднего устройства 50B подвески в продольном направлении может быть укорочена так, что может быть укорочена полная длина самоходного транспортного средства 1B, улучшается эффективность передвижения.
[0188] Кроме того, вращающийся вал 18B находится по существу в центре рамы 10B корпуса транспортного средства в продольном направлении. То есть опорная часть 59B поддерживается по существу центром рамы 10B корпуса транспортного средства в продольном направлении с возможностью поворота, а качающийся рычаг 54B расположен с продолжением вперед по существу от центра рамы 10B корпуса транспортного средства в продольном направлении. Таким образом, поскольку переднее устройство 50B подвески (качающийся рычаг 54B) не сильно выступает в направлении передней стороны самоходного транспортного средства 1B, а полная длина самоходного транспортного средства 1B может быть укорочена, улучшается эффективность передвижения.
[0189] Кроме того, качающийся рычаг 54B переднего устройства 50B подвески и качающийся рычаг 94B заднего устройства 90B подвески находятся по существу рядом с центром рамы 10B корпуса транспортного средства в продольном направлении и поддерживаются с возможностью поворота. По этой причине усилие, прикладываемое со стороны переднего устройства 50B подвески и заднего устройства 90B подвески к раме 10B корпуса транспортного средства, легко концентрируется поблизости от центра. В данном случае базовая часть 11B рамы, снабженная вращающимися валами 18B и 19B, имеет продольно симметричную форму, а за счет усиливающих рам 24B и 25B, присоединенных поблизости от вращающихся валов 18B и 19B, образована ферменная конструкция. То есть базовая часть 11B рамы обладает большой прочностью, поскольку эффективно укрепляется положение, в котором легко концентрируется усилие, и прочность выравнивается. Таким образом, рама 10B корпуса транспортного средства обладает достаточной прочностью, и может исключать увеличение массы.
[0190] Кроме того, вращающийся вал 18B находится в нижней части по существу центра рамы 10B корпуса транспортного средства в продольном направлении, а второе плечо 61B предоставлено с расположением вертикально вниз от опорной части 59B. Кроме того, вращающийся рычаг 51B, соединительный рычаг 53B, амортизатор 210B и рычажный механизм 211B расположены под рамой 10B корпуса транспортного средства. То есть главные составные элементы переднего устройства 50B подвески расположены под рамой 10B корпуса транспортного средства. Дополнительно, качающийся рычаг 54B находится на боковой стороне рамы 10B корпуса транспортного средства. Таким образом, переднее устройство 50B подвески не занимает внутреннюю часть рамы 10B корпуса транспортного средства, внутреннее пространство рамы 10B корпуса транспортного средства может эффективно использоваться, а полная длина самоходного транспортного средства 1B может быть укорочена. По этой причине внутри рамы 10B корпуса транспортного средства могут быть расположены, например, аккумулятор и т.п.
[0191] В данном случае колебание переднего гусеничного движущего устройства 30A в вертикальном направлении, то есть вращение двигателя 52B может выполняться в ответ на действие водителя. Однако, существует множество случаев, в которых водитель не может легко приводить в действие правое и левое передние гусеничные движущие устройства 30A, качая их таким образом, чтобы движущие устройства следовали уклону или неровному участку неровной земли. Таким образом, по аналогии с самоходным транспортным средством 1A, необходимо управлять двигателем 52B, служащим в качестве устройства вращения, с помощью различных датчиков и контроллера CB. Дополнительно, в качестве конфигурации, в которой двигатель 52B приводится в действие в ответ на действие водителя, может использоваться такая же конфигурация, как рабочая конфигурация двигателя 52A самоходного транспортного средства 1A, и, таким образом, ее описание будет пропущено.
[0192] Далее будет описана работа амортизаторов 210B и 230B, служащих в качестве амортизирующих механизмов. Дополнительно, поскольку амортизатор 210B переднего устройства 50B подвески и амортизатор 230B заднего устройства 90B подвески продольно симметричны друг другу, ниже будет типовым образом описан амортизатор 210B переднего устройства 50B подвески, а описание амортизатора 230B заднего устройства 90B подвески будет пропущено. Фиг. 27-29 представляют собой вид сбоку справа, иллюстрирующий рабочее состояние амортизатора 210B, и описаны только главные части. Дополнительно, Фиг. 27 иллюстрирует состояние, когда самоходное транспортное средство 1B движется по плоской земле. Фиг. 28 иллюстрирует состояние, когда переднее гусеничное движущее устройство 30A поднимается поверх выпуклой части земли. В данном случае переднее гусеничное движущее устройство 30A качается вверх, и качающийся рычаг 54B качается вверх. Фиг. 29 схематично иллюстрирует амортизатор 210B и т.п. перед и после колебания переднего гусеничного движущего устройства 30A. В данном случае состояние без колебания обозначено пунктирной линией, состояние колебания обозначено сплошной линией, некачающийся элемент показан ссылочным обозначением a, а качающийся элемент показан ссылочным обозначением b.
[0193] Как описано выше, один конец амортизатора 210B соединен с корпусом 200B двигателя, служащим в качестве качающейся опорной части, а другой его конец соединен с рамой 10B корпуса транспортного средства через рычажный механизм 211B. По этой причине амортизатор 210B может уменьшить столкновение между рамой 10B корпуса транспортного средства и правым и левым передними гусеничными движущими устройствами 30AR и 30AL.
[0194] Например, направленная вверх и назад ударная нагрузка, генерируемая выпуклой частью земли, прикладывается к переднему гусеничному движущему устройству 30A, когда транспортное средство движется вперед. В это время в состоянии на Фиг. 27 правое и левое передние гусеничные движущие устройства 30AR и 30AL вследствие ударной нагрузки качаются вверх вокруг вращающегося вала 18B, служащего в качестве оси (линия L1B). По этой причине правый и левый качающиеся рычаги 54B поворачиваются вверх, как проиллюстрировано на Фиг. 28, в соответствии с поворотом правого и левого передних гусеничных движущих устройств 30AR и 30AL. Дополнительно на Фиг. 28 правый и левый качающиеся рычаги 54B поворачиваются в направлении против часовой стрелки на угол αB вокруг вращающегося вала 18B, служащего в качестве оси (линия L1B).
[0195] Когда правый и левый качающиеся рычаги 54B поворачиваются вверх, правый и левый соединительные рычаги 53B (не проиллюстрировано) передвигаются вперед. Когда правый и левый соединительные рычаги 53B передвигаются вперед, вращающийся рычаг 51B вдавливается вперед, не поворачиваясь в то же время вокруг вращающегося вала 55B, служащего в качестве оси (линия L2B). Поскольку вращающийся рычаг 51B вдавливается вперед, корпус 200B двигателя, поддерживающий вращающийся рычаг 51B, поворачивается вперед и вверх вокруг опорного вала 22B, служащего в качестве оси (линия L3B). По этой причине амортизатор 210B, соединенный с корпусом 200B двигателя, тянется вперед.
[0196] В данном случае другой конец амортизатора 210B соединен с рычажным механизмом 211B. Поскольку правая и левая тяговые штанги 213B рычажного механизма 211B образованы таким образом, что одни их концы соединены с корпусом 200B двигателя, правая и левая тяговые штанги передвигаются вперед, когда корпус 200B двигателя поворачивается вверх. Поскольку правая и левая тяговые штанги 213B передвигаются вперед, коромысло 212B поворачивается вперед и вверх вокруг оси 20B коромысла, служащей в качестве оси (линия L4B). По этой причине амортизатор 210B, соединенный с концом коромысла 212B, вдавливается вперед. Таким образом, амортизатор 210B занимает положение, в котором передний конец (соединительная часть с корпусом 200B двигателя) тянется вперед, а задний конец (соединительная часть с коромыслом 212B) вдавливается вперед.
[0197] Дополнительно правая и левая тяговые штанги 213B, которые прикладывают усилие к заднему концу амортизатора 210B, образованы так, что один конец соединен с корпусом 200B двигателя, который является соосным с передним концом амортизатора 210B, а другой конец соединен между верхним и нижним концами коромысла 212B. То есть расстояние D1 от центра вращения коромысла (линия L4B, проходящая через центр оси 20B коромысла) до соединительной части между коромыслом 212B и амортизатором 210B длиннее, чем расстояние D2 от центра вращения коромысла (линия L4B, проходящая через центр оси коромысла 20) до соединительной части между коромыслом 212B и правой и левой тяговыми штангами 213B. Кроме того, один конец каждой правой и левой тяговых штанг 213B и амортизатор 210B соосно соединены с корпусом 200B двигателя. Таким образом, амортизатор 210B укорачивается, когда правое и левое передние гусеничные движущие устройства 30AR и 30AL качаются вверх. По этой причине, поскольку амортизатор 210B уменьшает усилие, действующее в направлении укорачивания, уменьшается столкновение, генерируемое, когда правое и левое передние гусеничные движущие устройства 30AR и 30AL качаются вверх.
[0198] Таким образом, столкновение, генерируемое между рамой 10B корпуса транспортного средства и правым и левым передними гусеничными движущими устройствами 30AR и 30AL, может быть уменьшено посредством амортизатора 210B. По этой причине, поскольку правое и левое передние гусеничные движущие устройства 30AR и 30AL устойчиво контактируют с землей, улучшается эффективность передвижения или комфорт во время движения. Кроме того, поскольку амортизатор 210B представляет собой простую конструкцию, выполненную в виде телескопического штангообразного элемента, уменьшается количество составных элементов, а производительность или технологичность технического обслуживания являются удовлетворительными.
[0199] Кроме того, рычажный механизм 211B используют для укорачивания амортизатора 210B, когда правое и левое передние гусеничные движущие устройства 30AR и 30AL качаются вверх, а корпус 200B двигателя поворачивается вверх и вперед. Таким образом, амортизатор 210B, служащий в качестве амортизирующего механизма, может эффективно уменьшать столкновение, будучи в то же время укороченным. То есть амортизатор 210B может быть выполнен с возможностью уменьшения столкновения в одном направлении. Поскольку конфигурация является простой, производительность или технологичность технического обслуживания являются удовлетворительными.
[0200] Дополнительно, амортизатор 210B, служащий в качестве амортизирующего механизма, не ограничен описанной выше конфигурацией. Если столкновение может быть уменьшено, может использоваться, например, комбинация пружины и цилиндра.
[0201] Кроме того, рычажный механизм 211B не ограничен описанной выше конфигурацией. Рычажный механизм может использоваться для укорачивания амортизатора 210B, когда правое и левое передние гусеничные движущие устройства 30AR и 30AL качаются вверх, а корпус 200B двигателя поворачивается вверх и вперед. Например, вращающийся вал тяговой штанги 213B может отличаться от вращающегося вала амортизатора 210B в корпусе 200B двигателя. Кроме того, может использоваться конфигурация с использованием одной тяговой штанги 213B.
[0202] Кроме того, расположение амортизатора 210B не ограничено описанной выше конфигурацией. Например, амортизатор 210B может быть расположен с возможностью соединения с рамой 10B корпуса транспортного средства и корпусом 200B двигателя, служащим в качестве качающейся опорной части. Например, хотя не проиллюстрировано на чертежах, один конец амортизатора 210B может быть соединен с рамой 10B корпуса транспортного средства без использования рычажного механизма 211B. В описанной выше конфигурации задний конец амортизатора 210B может быть соединен с осью 20B коромысла. Дополнительно, в случае подобной конфигурации необходимо, чтобы амортизатор 210B был выполнен с возможностью уменьшения столкновения, генерируемого, когда амортизатор удлиняется, и, таким образом, конфигурация амортизатора 210B становится усложненной. Кроме того, амортизатор 210B может быть расположен на передней стороне корпуса 200B двигателя. Например, один конец амортизатора 210B может быть соединен с передней стенкой 205B кронштейна 203B корпуса 200B двигателя, а другой конец амортизатора 210B может быть соединен с рамой 10B корпуса транспортного средства на передней и верхней сторонах соединительной части кронштейна 203B одного конца. В случае подобной конфигурации амортизатор 210B может уменьшить столкновение, будучи в то же время укороченным. Однако, поскольку амортизатор 210B расположен с продолжением вперед от корпуса 200B двигателя, полная длина рамы 10B корпуса транспортного средства увеличивается, и, таким образом, эффективность передвижения ухудшается. Таким образом, с точки зрения производительности, технологичности технического обслуживания и эффективности передвижения необходимо присоединять амортизатор 210B к раме 10B корпуса транспортного средства через рычажный механизм 211B.
[0203] В данном случае, поскольку операция передвижения и операция управления самоходным транспортным средством 1B аналогичны операции передвижения и операции управления самоходным транспортным средством 1A, ее описание будет пропущено.
[0204] Дополнительно, переднее устройство 50B подвески не ограничено описанной выше конфигурацией. Переднее устройство подвески может содержать корпус 200B двигателя, который служит в качестве качающейся опорной части, поддерживаемой рамой 10B корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, вращающийся рычаг 51B, который проходит в горизонтальном направлении и поддерживается корпусом 200B двигателя с возможностью поворота в центре вращающегося рычага в горизонтальном направлении, качающийся рычаг 54BR, который поддерживается рамой 10B корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и конец которого соединен с правым передним гусеничным движущим устройством 30AR, качающийся рычаг 54BL, который поддерживается рамой 10B корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и конец которого соединен с левым передним гусеничным движущим устройством 30AL, правый соединительный рычаг 53BR, один конец которого соединен с правым концом вращающегося рычага 51B, а другой конец соединен с правым качающимся рычагом 54BR, и левый соединительный рычаг 53BL, один конец которого соединен с левым концом вращающегося рычага 51B, а другой конец соединен с левым качающимся рычагом 54BL. В данном случае амортизатор 210B, служащий в качестве амортизирующего механизма, может предоставляться между рамой 10B корпуса транспортного средства и корпусом 200B двигателя.
[0205] Например, второе плечо 61B качающегося рычага 54B переднего устройства 50B подвески проходит вниз от опорной части 59B, но может продолжаться вверх. С подобной конфигурацией второе плечо 61B не выступает в направлении нижней стороны рамы 10B корпуса транспортного средства. Соответственно, когда транспортное средство движется, можно предотвратить контакт второго плеча 61B с препятствием. Кроме того, поскольку за счет уменьшения высоты самоходного транспортного средства 1B можно опустить центр тяжести, улучшается эффективность передвижения. Дополнительно, когда требуется опустить центр тяжести, необходимо, чтобы тяжелый аккумулятор или топливный бак находился в нижней части рамы 10B корпуса транспортного средства. Дополнительно, по аналогии с передним устройством 50B подвески описанный выше эффект получается даже в заднем устройстве 90B подвески.
[0206] Кроме того, по аналогии с передними и задними устройствами 50A и 90A подвески самоходного транспортного средства 1A, передние и задние устройства 50B и 90B подвески могут не содержать двигателей 52B и 92B, служащих в качестве вращающих устройств. Поскольку подобная конфигурация является аналогичной конфигурации самоходного транспортного средства 1A, ее описание будет пропущено. Кроме того, по аналогии с самоходным транспортным средством 1A, самоходное транспортное средство 1B может передвигаться по меньшей мере с помощью пары из правого и левого движущих устройств, и могут устанавливаться конфигурации, иные чем переднее и заднее устройства 50B и 90B подвески, как в примере самоходного транспортного средства 1A.
[0207] Например, по аналогии с самоходным транспортным средством 1A, самоходным транспортным средством 1B может быть самоходное транспортное средство, в котором предоставлено только одно из задних гусеничных движущих устройств 70AR и 70AL самоходного транспортного средства 1B.
[0208] Кроме того, операции управления самоходными транспортными средствами 1A и 1B выполняются с помощью так называемого известного механизма рулевого управления, в котором правое и левое передние гусеничные движущие устройства 70AR и 70AL, служащие в качестве движущих устройств, поворачиваются взаимосвязанным образом в горизонтальном направлении посредством устройства рулевого управления, но изобретение не ограничено данной конфигурацией. Например, транспортным средством можно управлять за счет разницы в скорости движения между движущими устройствами.
[0209] Кроме того, самоходным транспортным средством согласно варианту осуществления может быть самоходное транспортное средство 1C, проиллюстрированное на Фиг. 30-33. Фиг. 30 представляет собой вид сбоку справа, иллюстрирующий пример самоходного транспортного средства 1C согласно еще одному варианту осуществления. Фиг. 31 представляет собой вид сверху Фиг. 30, Фиг. 32 представляет собой вид сбоку справа, иллюстрирующий главным образом конфигурации рамы 10C корпуса транспортного средства и устройства 50C и 90C подвески, Фиг. 33 представляет собой вид сверху Фиг. 32, а Фиг. 34 представляет собой вид в перспективе, иллюстрирующий раму 10C корпуса транспортного средства, если смотреть сверху диагонально вперед.
[0210] Как проиллюстрировано на Фиг. 30-34, самоходное транспортное средство 1C содержит передние гусеничные движущие устройства 30C, которые служат в качестве пары из правого и левого движущих устройств, предоставленных в передней части рамы 10C корпуса транспортного средства, переднее устройство 50C подвески, которое подвешивает пару из правого и левого передних гусеничных движущих устройств 30C на раме 10C корпуса транспортного средства, задние гусеничные движущие устройства 70C, которые служат в качестве пары из правого и левого движущих устройств, предоставленных в задней части рамы корпуса транспортного средства, и заднее устройство 90C подвески, которое подвешивает пару из правого и левого задних гусеничных движущих устройств 70C на раме 10C корпуса транспортного средства. Кроме того, самоходное транспортное средство 1C содержит двигатель EC, который служит в качестве пускового двигателя, насос (не проиллюстрировано), который приводится в движение двигателем EC, контроллер (не проиллюстрировано), который содержит вычислительный блок и блок хранения и управляет различными устройствами.
[0211] Рама 10C корпуса транспортного средства покрыта оболочкой 110C главного корпуса. Оболочку 110C главного корпуса используют для покрытия рамы 10C корпуса транспортного средства. Оболочка 110C главного корпуса содержит передние крылья 111C, которые предоставлены над передними гусеничными движущими устройствами 30C, и задние крылья 112C, которые предоставлены над задними гусеничными движущими устройствами 70C.
[0212] Водительское сиденье 113C предоставлено на оболочке главного корпуса 110 между передним гусеничным движущим устройством 30C и задним гусеничным движущим устройством 70C.
[0213] На передней стороне водительского сиденья 113C предоставлена рукоять 114C, которая управляет операцией передвижения самоходного транспортного средства 1C. Рукоять 114C содержит вал 115C рулевого управления, рукояточный руль 116C, который предоставлен на верхнем конце вала 115C рулевого управления, выступая наружу в горизонтальном направлении, ручку 117C акселератора, которая служит в качестве акселератора, предоставленного на одном конце рукояточного руля 116C, и т.п.
[0214] Вал 115C рулевого управления поддерживается рамой 10C корпуса транспортного средства с возможностью поворота. Нижний конец вала 115C рулевого управления снабжен датчиком рукояти (не проиллюстрировано), выявляющим угол поворота вала 115C рулевого управления.
[0215] Ручка 117C акселератора поддерживается рукояточным рулем 116C с возможностью поворота. Ручка 117C акселератора содержит датчик ручки акселератора (не проиллюстрировано), выявляющий угол поворота ручки 117C акселератора.
[0216] Под водительским сиденьем 113C предоставлены правая и левая подножки 118C. Самоходное транспортное средство 1C представляет собой самоходное транспортное средство седлового типа. Водитель сидит на водительском сиденье 113C в то время, как ноги помещаются на правой и левой подножках 118C.
[0217] Далее будет описана рама 10C корпуса транспортного средства. Дополнительно, поскольку рама 10C корпуса транспортного средства имеет горизонтальную симметричную форму, при необходимости правый составной элемент будет соответствующим образом обозначаться ссылочным обозначением R, а левый составной элемент будет соответствующим образом обозначаться ссылочным обозначением L.
[0218] Как проиллюстрировано на Фиг. 32-34, рама 10C корпуса транспортного средства получается за счет соединения множества стальных элементов посредством сварки или т.п. Стальной элемент представляет собой цилиндрическую или квадратную цилиндрическую трубу. Рама 10C корпуса транспортного средства содержит главную раму 11C, которая проходит в продольном направлении, пару правой и левой боковых рам 12C (12CR, 12CL), которые предоставлены на обеих правой и левой сторонах главной рамы 11C параллельно ей и продолжаются в продольном направлении, множество усиливающих рам 13C, 14C, 15C, 16C и 17C, которые вытянуты поперек главной рамы 11C или правой и левой боковых рам 12CR и 12CL, листообразную переднюю опорную пластину 18C, которую используют для прикрепления переднего устройства 50C подвески, и т.п.
[0219] Как проиллюстрировано на Фиг. 32, главная рама 11C и боковая рама 12C содержат переднюю часть 19C, которая проходит горизонтально в продольном направлении, переднюю наклонную часть 20C, которая наклонена от передней части 19C таким образом, что передняя часть является высокой, а задняя часть является низкой, центральную часть 21C, которая проходит горизонтально в продольном направлении от передней наклонной части 20C, заднюю наклонную часть 22C, которая наклонена от центральной части 21C таким образом, что передняя часть является низкой, а задняя часть является высокой, и заднюю часть 23C, которая наклонена от задней наклонной части 22C таким образом, что передняя часть является низкой, а задняя часть является высокой. Данные элементы образованы за счет изгиба главной рамы 11C и боковых рам 12C.
[0220] Правая и левая боковые рамы 12CR и 12CL образованы таким образом, чтобы передние концы были соединены друг с другом и задние концы были соединены друг с другом, а на изображении сверху соединительные части были образованы с U-образной формой. Передние и задние концы главной рамы 11C соединены, соответственно, с передними и задними соединительными частями.
[0221] На изображении сверху усиливающая рама 13C имеет по существу U-образную форму и расположена по существу горизонтально. В данном случае один конец соединен с правой боковой рамой 12CR в задней наклонной части 22C, а другой конец соединен с левой боковой рамой 12CL в задней наклонной части 22C. Кроме того, усиливающая рама 13C также соединена с правой и левой боковыми рамами 12CR и 12CL и главной рамой 11C в передней наклонной части 20C.
[0222] На изображении сверху усиливающая рама 14C имеет по существу U-образную форму и расположена по существу горизонтально над усиливающей рамой 13C. В данном случае один конец соединен с правой боковой рамой 12CR в задней наклонной части 22C, а другой конец соединен с левой боковой рамой 12CL в задней наклонной части 22C. Кроме того, усиливающая рама 14C также соединена с правой и левой боковыми рамами 12CR и 12CL и главной рамой 11C в передней наклонной части 20C.
[0223] На изображении сверху усиливающая рама 15C имеет кольцевую форму, продолжающуюся в продольном направлении, и расположена по существу горизонтально над усиливающей рамой 14C, подлежащей соединению с правой и левой боковыми рамами 12CR и 12CL и центральной рамой 11C в передней наклонной части 20C, и подлежащей соединению с правой и левой боковыми рамами 12CR и 12CL и центральной рамой 11C в задней части 23C.
[0224] На изображении сзади усиливающая рама 16C образована с обратной U-образной формой и расположена по существу перпендикулярно. В данном случае один конец соединен с правой боковой рамой 12CR в задней наклонной части 22C, а другой конец соединен с левой боковой рамой 12CL в задней наклонной части 22C. Кроме того, усиливающая рама 16C также соединена с усиливающими рамами 14C и 15C.
[0225] На изображении сзади усиливающая рама 17C представляет собой листообразный элемент, имеет кольцевую форму, продолжающуюся в горизонтальном направлении, и расположена по существу перпендикулярно на задней стороне усиливающей рамы 16C. В данном случае правый и левый концы усиливающей рамы соединены, соответственно, с правой и левой боковыми рамами 12CR и 12CL, а центральная нижняя часть соединена с центральной рамой 11C. Кроме того, усиливающая рама 17C также соединена с усиливающей рамой 15C.
[0226] Вращающийся вал 24C, продолжающийся в горизонтальном направлении, прикреплен к центральной раме 11C в задней наклонной части 22C, и оба конца вращающегося вала 24C соединены с усиливающей рамой 13C.
[0227] В задней наклонной части 22C над вращающимся валом 24C к центральной раме 11C прикреплен вращающийся вал 25C, который проходит в горизонтальном направлении и является параллельным вращающемуся валу 24C, при этом оба конца вращающегося вала 25C соединены с усиливающей рамой 14C.
[0228] Кроме того, центр рамы 10C корпуса транспортного средства в горизонтальном направлении снабжен вращающимся валом 26C, который проходит в продольном направлении и соединен с верхними частями усиливающей рамы 16C и усиливающей рамы 17C. По этой причине вращающиеся валы 24C, 25C и 26C используют для соединения заднего устройства 90C подвески, как будет описано позже.
[0229] На изображении сверху передняя опорная пластина 18C имеет по существу прямоугольную форму, продолжающуюся в продольном направлении, а ее верхняя поверхность прикреплена к боковой раме 12C и к центральной раме 11C в передней части 19C. Передняя опорная пластина 18C содержит сквозное отверстие 27C, образованное в вертикальном направлении. По этой причине сквозное отверстие 27C используют для соединения переднего устройства 50C подвески, как будет описано позже.
[0230] Дополнительно, рама 10C корпуса транспортного средства не ограничена описанной выше конфигурацией. Рама 10C корпуса транспортного средства может использоваться для прикрепления к ней переднего устройства 50C подвески и заднего устройства 90C подвески и обладать достаточной жесткостью для самоходного транспортного средства. Например, вместо цилиндрической трубы рама 10C корпуса транспортного средства может быть образована полым квадратным столбчатым элементом или стальным элементом, имеющим L-образное или H-образное поперечное сечение.
[0231] Далее будет описано переднее гусеничное движущее устройство 30C, служащее в качестве пары из правого и левого движущих устройств. Дополнительно, поскольку правое и левое передние гусеничные движущие устройства 30C имеют горизонтальную симметричную форму, правое переднее гусеничное движущее устройство 30C будет типовым образом описано ниже. Описание конфигурации левого переднего гусеничного движущего устройства 30C будет пропущено. Кроме того, для правого переднего гусеничного движущего устройства 30C при необходимости будет соответствующим образом добавлено ссылочное обозначение R, а для левого переднего гусеничного движущего устройства 30C будет соответствующим образом добавлено ссылочное обозначение L. Фиг. 35 представляет собой вид сбоку справа, иллюстрирующий переднее гусеничное движущее устройство 30C, а Фиг. 36 представляет собой вид сбоку (вид сбоку слева), иллюстрирующий переднее гусеничное движущее устройство 30C, если смотреть с внутренней стороны транспортного средства. Кроме того, Фиг. 37 представляет собой частично увеличенное изображение в поперечном разрезе, иллюстрирующее переднее гусеничное движущее устройство 30C и используется для описания конфигурации крепления ведущего колеса 31C. В данном случае правая сторона показывает внутреннюю часть транспортного средства, а левая сторона показывает внешнюю сторону транспортного средства.
[0232] Как проиллюстрировано на Фиг. 35 и 36, переднее гусеничное движущее устройство 30C содержит ведущее колесо 31C, которое предоставлено в верхней части, ведомые колеса 32C, которые предоставлены в передней и задней частях, четыре вспомогательных катка 33C, которые предоставлены между двумя ведомыми колесами 32C, гусеничную ленту 34C, крепежную раму 35C, соединительную раму 36C, гидравлический двигатель 37C и т.п.
[0233] Гусеничная лента 34C обернута вокруг ведущего колеса 31C, двух ведомых колес 32C и четырех вспомогательных катков 33C таким образом, чтобы контактировать с их наружной периферией.
[0234] Ведомое колесо 32C и вспомогательный каток 33C поддерживаются с возможностью вращения крепежной рамой 35C, а к ней прикреплен гидравлический двигатель 37C.
[0235] Соединительная рама 36C имеет направленную вверх треугольную форму и находится на внутренней стороне транспортного средства, как крепежной раме 35C. По этой причине поблизости от верхней вершины треугольной формы предоставлено сквозное отверстие 38C.
[0236] Как проиллюстрировано на Фиг. 37, гидравлический двигатель 37C, служащий в качестве приводного устройства переднего гусеничного движущего устройства 30C, находится на внутренней стороне транспортного средства, как ведущее колесо 31C, и прикреплен к крепежной раме 35C. Ведущее колесо 31C прикреплено к переднему концу ведущего вала 39C гидравлического двигателя 37C. Ведущее колесо 31C вращается гидравлическим двигателем 37C.
[0237] Крепежная рама 35C содержит вращающийся вал 40C, который является соосным с ведущим валом 39C гидравлического двигателя 37C. Вращающийся вал 40C вставляют через сквозное отверстие 38C соединительной рамы 36C. Крепежная рама 35C поддерживается соединительной рамой 36C с возможностью поворота вокруг вращающегося вала 40C, служащего в качестве оси. Таким образом, переднее гусеничное движущее устройство 30C поддерживается соединительной рамой 36C с возможностью поворота в продольном направлении вокруг вращающегося вала 40C, служащего в качестве оси.
[0238] В данном случае крепежная рама 35C содержит дугообразную выемку 41C, образованную вокруг вращающегося вала 40C, а стержень 42C, который вертикально устанавливают в соединительную раму 36C, вставляют в выемку 41C. Когда крепежная рама 35C поворачивается относительно соединительной рамы 36C, стержень 42C скользит внутри выемки 41C. По этой причине, диапазон поворота крепежной рамы 35C вокруг вращающегося вала 40C, служащего в качестве оси, регулируется стержнем 42C и выемкой 41C. То есть диапазон поворота переднего гусеничного движущего устройства 30C в продольном направлении вокруг вращающегося вала 40C, служащего в качестве оси, является регулируемым.
[0239] Переднее гусеничное движущее устройство 30C имеет по существу ромбовидную форму, в которой вершина находится в переднем, заднем, верхнем и нижнем положениях и которая проходит в продольном направлении. По этой причине гусеничную ленту 34C около нижней вершины используют в качестве контактирующей с землей части 43C для контакта с землей. Дополнительно, ромбовидная форма образована таким образом, что передняя вершина смещена вверх относительно задней вершины.
[0240] Кроме того, поблизости от двух нижних вершин треугольной формы соединительной рамы 36C предоставлены вращающиеся валы 44C и 45C, которые продолжаются вертикально в направлении внутренней части транспортного средства. Два вращающихся вала 44C и 45C используют для соединения переднего устройства 50C подвески, как будет описано позже.
[0241] Поскольку переднее гусеничное движущее устройство 30C имеет описанную выше конфигурацию, гусеничная лента 34C легко захватывается выпуклой частью, выступающей вверх от земли, когда движущее устройство поднимается поверх выпуклой части, и, таким образом, стабилизируется операция передвижения. Кроме того, когда контактирующая с землей часть 43C образована с меленьким размером, уменьшается фрикционное сопротивление относительно земли во время операции движения с поворотом и, таким образом, операция движения с поворотом улучшается.
[0242] Кроме того, поскольку переднее гусеничное движущее устройство 30C поддерживается с возможностью поворота в продольном направлении, улучшается эффективность контакта с землей, и получается амортизирующее действие, генерируемое за счет поворота переднего гусеничного движущего устройства 30C. Таким образом, транспортное средство может устойчиво двигаться, и улучшается комфорт во время движения.
[0243] Кроме того, ведущее колесо 31C находится в верхней части переднего гусеничного движущего устройства 30C, ведущее колесо 31C прикреплено к переднему концу ведущего вала 39C гидравлического двигателя 37C, вращающего ведущее колесо 31C, и уменьшается выступающая величина гидравлического двигателя 37C в направлении внутренней части транспортного средства. То есть гидравлический двигатель 37C находится во внутриколесном виде. Таким образом, между правым и левым передними гусеничными движущими устройствами 30CR и 30CL под рамой корпуса транспортного средства 10 может быть образовано большое пространство. По этой причине в этом пространстве может быть расположен соединительный механизм переднего устройства 50C подвески, как будет описано позже. Поскольку пространство эффективно используется, ширина транспортного средства не увеличивается.
[0244] Кроме того, поскольку диапазон поворота переднего гусеничного движущего устройства 30C в продольном направлении вокруг вращающегося вала 40C, служащего в качестве оси, является регулируемым, может предотвращаться излишний поворот, и может предотвращаться выход из строя переднего гусеничного движущего устройства 30C и переднего устройства 50C подвески.
[0245] Дополнительно, переднее гусеничное движущее устройство 30C также содержит устройство регулировки натяжения (не проиллюстрировано), которое регулирует натяжение гусеничной ленты 34C за счет перемещения положения ведомого колеса 32C относительно крепежной рамы 35C, тормозное устройство (не проиллюстрировано), которое останавливает вращение ведущего колеса 31C, амортизатор, который служит в качестве амортизирующего механизма, устраняющего колебание переднего гусеничного движущего устройства 30C в продольном направлении относительно соединительной рамы 36C, и т.п. Амортизатор предоставлен между крепежной рамой 35C и соединительной рамой 36C, при этом переднее гусеничное движущее устройство 30C устойчиво контактирует с землей. Соответственно, улучшается эффективность передвижения или комфорт во время движения. Кроме того, поскольку амортизатор может уменьшать нагрузку на переднее устройство 50C подвески, такую как столкновение или закручивание соединительной части, когда переднее гусеничное движущее устройство 30C контактирует с неровным участком неровной земли, улучшается долговечность.
[0246] Далее будет описано переднее устройство 50C подвески. Дополнительно, поскольку переднее устройство 50C подвески имеет горизонтальную симметричную форму, правый составной элемент при необходимости будет соответствующим образом обозначаться ссылочным обозначением R, а левый составной элемент будет соответствующим образом обозначаться ссылочным обозначением L. Фиг. 38 представляет собой вид сбоку (вид сбоку слева), иллюстрирующий переднее гусеничное движущее устройство 30C и переднее устройство 50C подвески, если смотреть с внутренней стороны транспортного средства. Фиг. 39A и 39B представляют собой схематичные изображения, иллюстрирующие работу переднего устройства 50C подвески Фиг. 38, Фиг. 39A иллюстрирует состояние, когда соединительный механизм Фиг. 38 удлинен, а Фиг. 39B иллюстрирует состояние, когда соединительный механизм Фиг. 38 укорочен.
[0247] Как проиллюстрировано на Фиг. 33, 35 и 38, переднее устройство 50C подвески содержит раму 51C тележки, рычажные механизмы 52C, которые служат в качестве пары из правого и левого соединительных механизмов, соединяющих правое и левое передние гусеничные движущие устройства 30CR и 30CL, соответственно, с правой и левой сторонами рамы 51C тележки, и т.п. Дополнительно, на Фиг. 38 будет пропущено описание левого рычажного механизма 52CL и левого переднего гусеничного движущего устройства 30CL.
[0248] На изображении сверху рама 51C тележки имеет по существу прямоугольную кубическую форму, продолжающуюся в продольном направлении, а вращающийся вал 53C, используемый в качестве вала рулевого управления, установлен вертикально в центр верхней поверхности в горизонтальном направлении. Вращающийся вал 53C вставляют через сквозное отверстие 27C передней опорной пластины 18C. По этой причине рама 51C тележки соединена с передней опорной пластиной 18C с возможностью поворота вокруг вращающегося вала 53C, служащего в качестве оси. То есть рама 51C тележки поддерживается рамой 10C корпуса транспортного средства с возможностью поворота относительно вертикального направления, служащего в качестве оси. Дополнительно, линия L1C на Фиг. 35, 38 и 39 показывает центр вращающегося вала 53C (центр вращения рамы 51C тележки), соответствует осевому направлению вала рулевого управления и предоставлена в вертикальном направлении.
[0249] Кроме того, вращающийся вал 54C (54CR, 54CL) и вращающийся вал 55C (55CR, 55CL) предоставлены на правой и левой боковых поверхностях рамы 51C тележки с продолжением вертикально. Вращающийся вал 54C и вращающийся вал 55C предоставлены в линейных симметричных положениях относительно линии L1C.
[0250] Дополнительно, рама 51C тележки не ограничена описанной выше конфигурацией и может поддерживаться рамой 10C корпуса транспортного средства с возможностью поворота вокруг вала рулевого управления, служащего в качестве оси, в вертикальном направлении. Кроме того, направление вращающегося вала 53C, служащего в качестве вала рулевого управления рамы 51C тележки, не ограничено вертикальным направлением. Вращающийся вал 53C может иметь угол продольного наклона, при котором передняя часть является низкой, а задняя часть является высокой. Таким образом, когда вращающийся вал 53C имеет угол продольного наклона, улучшаются эффективность передвижения и долговечность. Дополнительно, когда вращающийся вал 53C расположен в вертикальном направлении, конфигурация переднего устройства 50C подвески является простой, а производительность является высокой.
[0251] Рычажный механизм 52C содержит первый рычажный элемент 56C, второй рычажный элемент 57C, третий рычажный элемент 58C, четвертый рычажный элемент 59C и пятый рычажный элемент 60C. Первый рычажный элемент 56C, второй рычажный элемент 57C, третий рычажный элемент 58C и четвертый рычажный элемент 59C имеют одинаковую форму и образованы в виде штангообразного элемента, изогнутого с по существу дугообразной формой. Пятый рычажный элемент 60C представляет собой прямой штангообразный элемент, который не изогнут. Когда концы пяти рычажных элементов 56C, 57C, 58C, 59C и 60C соединены, получается рычажный механизм 52C.
[0252] Один конец первого рычажного элемента 56C соединен с вращающимся валом 54C рамы 51C тележки. Один конец второго рычажного элемента 57C соединен с другим концом первого рычажного элемента 56C, а другой его конец соединен с вращающимся валом 44C соединительной рамы 36C переднего гусеничного движущего устройства 30C. Один конец третьего рычажного элемента 58C соединен с вращающимся валом 55C рамы 51C тележки. Один конец четвертого рычажного элемента 59C соединен с другим концом третьего рычажного элемента 58C, а другой его конец соединен с вращающимся валом 45C соединительной рамы 36C переднего гусеничного движущего устройства 30C. Один конец пятого рычажного элемента 60C соединен с соединительной частью 61C между первым рычажным элементом 56C и вторым рычажным элементом 57C, а другой его конец соединен с соединительной частью 62C между третьим рычажным элементом 58C и четвертым рычажным элементом 59C. Дополнительно, пятый рычажный элемент 60C расположен на внутренней стороне транспортного средства, как первый рычажный элемент 56C, второй рычажный элемент 57C, третий рычажный элемент 58C и четвертый рычажный элемент 59C.
[0253] В данном случае рычажный механизм 52C имеет вертикально симметричную конструкцию относительно пятого рычажного элемента 60C. По этой причине расстояние между вращающимся валом 54C и соединительной частью 61C, расстояние между соединительной частью 61C и вращающимся валом 44C, расстояние между вращающимся валом 55C и соединительной частью 62C и расстояние между соединительной частью 62C и вращающимся валом 45C равны друг другу. Кроме того, расстояние между вращающимся валом 44C, соединенным со вторым рычажным элементом 57C, и вращающимся валом 45C, соединенным с четвертым рычажным элементом 59C, равно расстоянию между вращающимся валом 55C и вращающимся валом 54C рамы 51C тележки. Кроме того, первый рычажный элемент 56C, второй рычажный элемент 57C, третий рычажный элемент 58C и четвертый рычажный элемент 59C соединены друг с другом таким образом, чтобы изогнутая форма выступала вперед.
[0254] Между первым рычажным элементом 56C и пятым рычажным элементом 60C и между вторым рычажным элементом 57C и пятым рычажным элементом 60C, соответственно, предоставлены амортизаторы 63C и 64C. Каждый из амортизаторов 63C и 64C представляет собой телескопический штангообразный амортизирующий механизм, содержащий пружину, цилиндр и т.п. Один конец амортизатора 63C прикреплен с возможностью поворота к кронштейну 65C первого рычажного элемента 56C, а другой его конец прикреплен с возможностью поворота к кронштейну 66C пятого рычажного элемента 60C. Один конец амортизатора 64C прикреплен с возможностью поворота к кронштейну 67C второго рычажного элемента 57C, а другой его конец прикреплен с возможностью поворота к кронштейну 68C пятого рычажного элемента 60C.
[0255] Два амортизатора 63C и 64C расположены в вертикально симметричных положениях, при этом два амортизатора 63C и 64C во время удлинения и укорачивания генерируют одинаковое амортизирующее усилие. Дополнительно, вращающийся вал 40C переднего гусеничного движущего устройства 30C находится на линии L1C, и на ней также расположен центр контактирующей с землей части 43C переднего гусеничного движущего устройства 30C.
[0256] В данном случае, как проиллюстрировано на Фиг. 39A и 39B, рычажный механизм 52C движется телескопическим образом в вертикальном направлении, изгибаясь в то же время вперед и деформируясь таким образом, чтобы переднее гусеничное движущее устройство 30C могло подниматься в вертикальном направлении. В данном случае рычажный механизм 52C предоставляет переднему гусеничному движущему устройству 30C возможность подъема в вертикальном направлении вдоль линии L1C (вала рулевого управления).
[0257] Это обусловлено тем, что верхний рычажный механизм, содержащий первый рычажный элемент 56C, третий рычажный элемент 58C, пятый рычажный элемент 60C и амортизатор 63C, и нижний рычажный механизм, содержащий второй рычажный элемент 57C, четвертый рычажный элемент 59C, пятый рычажный элемент 60C и амортизатор 64C, являются вертикально симметричными друг другу, а амортизатор 63C и амортизатор 64C генерируют одинаковое амортизирующее усилие.
[0258] Таким образом, переднее гусеничное движущее устройство 30C может подниматься относительно изменения неровного участка неровной земли, а эффективность передвижения для неровной земли с неровным участком является удовлетворительной. Кроме того, поскольку рычажный механизм 52C, служащий в качестве соединительного механизма, содержит амортизаторы 63C и 64C, служащие в качестве амортизирующих механизмов, уменьшается столкновение между рамой 10C корпуса транспортного средства и передним гусеничным движущим устройством. Соответственно, переднее гусеничное движущее устройство 30C устойчиво контактирует с землей, и улучшается эффективность передвижения или комфорт во время движения.
[0259] Кроме того, переднее устройство 50C подвески используется для подъема переднего гусеничного движущего устройства 30C в вертикальном направлении и не содержит элемент выдвижения вперед или назад в отличие от заднего устройства 90C подвески, обеспечивающий возможность вертикального поворота, как будет описано позже. Таким образом, поскольку полная длина самоходного транспортного средства 1C может быть укорочена, может легко выполняться операция движения с поворотом, и улучшается эффективность передвижения.
[0260] Далее будет описана пара из правого и левого задних гусеничных движущих устройств 70C, служащих в качестве движущих устройств. Дополнительно, поскольку правое и левое задние гусеничные движущие устройства 70C имеют горизонтальную симметричную форму, ниже типовым образом будет описано правое заднее гусеничное движущее устройство 70C. Описание конфигурации левого заднего гусеничного движущего устройства 70C будет пропущено. Кроме того, правому заднему гусеничному движущему устройству 70C при необходимости будет соответствующим образом добавлено ссылочное обозначение R, а левому заднему гусеничному движущему устройству 70C будет соответствующим образом добавлено ссылочное обозначение L. Фиг. 40 представляет собой вид сбоку справа, иллюстрирующий заднее гусеничное движущее устройство 70C, а Фиг. 41 представляет собой заднее изображение, иллюстрирующее заднее гусеничное движущее устройство 70C и заднее устройство 90C подвески.
[0261] Как проиллюстрировано на Фиг. 40, заднее гусеничное движущее устройство 70C содержит ведущее колесо 71C, которое предоставлено в верхней части, ведомые колеса 72C, которые предоставлены под ведущим колесом 71C с расположением в передней и задней частях, четыре вспомогательных катка 73C, которые предоставлены между двумя ведомыми колесами 72C, гусеничную ленту 74C, крепежную раму 75C, гидравлический двигатель 77C и т.п.
[0262] В данном случае заднее гусеничное движущее устройство 70C имеет форму, отличающуюся от формы переднего гусеничного движущего устройства 30C на боковом изображении. Соединение между задним гусеничным движущим устройством 70C и задним устройством 90C подвески выполнено без соединительной рамы 36C. По этой причине описание такой же конфигурации, как конфигурация переднего гусеничного движущего устройства 30C, будет соответствующим образом пропущено.
[0263] По аналогии с гидравлическим двигателем 37C переднего гусеничного движущего устройства 30C, гидравлический двигатель 77C, служащий в качестве приводного устройства заднего гусеничного движущего устройства 70C, находится на ведущем колесе 71C на внутренней стороне транспортного средства и прикреплен к крепежной раме 75C. Ведущее колесо 71C прикреплено к переднему концу ведущего вала 79C гидравлического двигателя 77C. Ведущее колесо 71C вращается гидравлическим двигателем 77C.
[0264] Кроме того, по аналогии с крепежной рамой 35C переднего гусеничного движущего устройства 30C, крепежная рама 75C содержит вращающийся вал 80C, который является соосным с ведущим валом 79C гидравлического двигателя 77C. В данном случае вращающийся вал 80C используют для соединения заднего устройства 90C подвески, как будет описано позже, при этом заднее гусеничное движущее устройство 70C соединено с задним устройством 90C подвески с возможностью поворота в продольном направлении вокруг вращающегося вала 80C, служащего в качестве оси.
[0265] Кроме того, крепежная рама 75C содержит дугообразную выемку 81C, образованную вокруг вращающегося вала 80C, а в выемку 81C вставляют стержень 82C, предоставленный в заднем устройстве 90C подвески, как будет описано позже. Когда крепежная рама 75C поворачивается относительно заднего устройства 90C подвески, стержень 82C скользит внутри выемки 81C. По этой причине, диапазон поворота крепежной рамы 75C вокруг вращающегося вала 80C, служащего в качестве оси, регулируется стержнем 82C и выемкой 81C. То есть по аналогии с передним гусеничным движущим устройством 30C, регулируется диапазон поворота заднего гусеничного движущего устройства 70C в продольном направлении вокруг вращающегося вала 80C, служащего в качестве оси.
[0266] Кроме того, заднее гусеничное движущее устройство 70C расположено таким образом, что переднее ведомое колесо 72C находится на верхней стороне относительно заднего ведомого колеса 72C. По этой причине гусеничная лента 74C, на которой расположены заднее ведомое колесо 72C и четыре вспомогательных катка 73C, становится контактирующей с землей частью 83C для контакта с землей. То есть заднее гусеничное движущее устройство 70C образовано таким образом, что контактирующая с землей часть 83C шире, чем переднее гусеничное движущее устройство 30C.
[0267] Поскольку заднее гусеничное движущее устройство 70C имеет описанную выше конфигурацию, гусеничная лента 74C легко захватывается выпуклой частью, выступающей вверх от земли, когда движущее устройство поднимается поверх выпуклой части, и, таким образом, стабилизируется операция передвижения. Кроме того, поскольку контактирующая с землей часть 83C гусеничной ленты 74C образовано широко, транспортное средство может устойчиво двигаться.
[0268] Кроме того, поскольку заднее гусеничное движущее устройство 70C соединено с задним устройством 90C подвески с возможностью поворота в продольном направлении, улучшается эффективность контакта с землей, а за счет поворота заднего гусеничного движущего устройства 70C получается амортизирующее действие. Таким образом, транспортное средство может устойчиво двигаться, и улучшается комфорт во время движения. Кроме того, поскольку за счет амортизирующего действия может быть уменьшена нагрузка на заднее устройство 90C подвески, такая как столкновение или закручивание соединительной части, улучшается долговечность.
[0269] Кроме того, ведущее колесо 71C находится в верхней части заднего гусеничного движущего устройства 70C, ведущее колесо 71C прикреплено к переднему концу ведущего вала 79C гидравлического двигателя 77C, вращающего ведущее колесо 71C, и уменьшается выступающая величина гидравлического двигателя 77C в направлении внутренней части транспортного средства. То есть гидравлический двигатель 77C расположен во внутриколесном виде. Таким образом, между правым и левым задними гусеничными движущими устройствами 70CR и 70LC под рамой 10C корпуса транспортного средства может быть образовано большое пространство. Тогда в этом пространстве может быть расположен соединительный механизм заднего устройства 90C подвески, как будет описано позже. Поскольку пространство используется эффективно, ширина транспортного средства не увеличивается.
[0270] Кроме того, поскольку регулируется диапазон поворота заднего гусеничного движущего устройства 70C в продольном направлении вокруг вращающегося вала 80C, служащего в качестве оси, может предотвращаться излишний поворот, и, таким образом, может предотвращаться выход из строя заднего гусеничного движущего устройства 70C и заднего устройства 90C подвески.
[0271] Дополнительно, по аналогии с передним гусеничным движущим устройством 30C, заднее гусеничное движущее устройство 70C также содержит устройство регулировки натяжения (не проиллюстрировано), которое регулирует натяжение гусеничной ленты 74C за счет перемещения положения ведомого колеса 72C относительно крепежной рамы 75C, тормозное устройство (не проиллюстрировано), которое останавливает вращение ведущего колеса 71C, амортизатор, который служит в качестве амортизирующего механизма, устраняющего колебание заднего гусеничного движущего устройства 70C в продольном направлении относительно заднего устройства 90C подвески, и т.п. Амортизатор предоставлен между крепежной рамой 75C и задним устройством 90C подвески, а заднее гусеничное движущее устройство 70C устойчиво контактирует с землей. Соответственно, улучшается эффективность передвижения или комфорт во время движения. Кроме того, поскольку амортизатор может уменьшать нагрузку на заднее устройство 90C подвески, такую как столкновение или закручивание соединительной части, когда заднее гусеничное движущее устройство 70C контактирует с неровным участком неровной земли, улучшается долговечность.
[0272] В данном случае передние и задние гусеничные движущие устройства 30C и 70C приводятся в действие за счет движущей мощности двигателя EC. Движущая мощность двигателя EC передается насосу (не проиллюстрировано), предоставленному на раме 10C корпуса транспортного средства, и дополнительно передается гидравлическим двигателям 37C и 77C через пропорциональный электромагнитный клапан (не проиллюстрировано). По этой причине, когда гидравлические двигатели 37C и 77C приводятся в действие, передние и задние гусеничные движущие устройства 30C и 70C приводятся в действие таким образом, что самоходное транспортное средство 1C может двигаться. Дополнительно, необходимо передавать движущую мощность передним и задним гусеничным движущим устройствам 30C и 70C через гибкий элемент, например, гибкий шланг. Передние и задние гусеничные движущие устройства 30C и 70C могут значительно подниматься или колебаться в вертикальном направлении передними и задними устройствами 50C и 90C подвески. Таким образом, необходимо передавать движущую мощность между рамой 10C корпуса транспортного средства и передними и задними гусеничными движущими устройствами 30C и 70C, не нарушая поднимание или колебание в вертикальном направлении. Когда для передачи движущей мощности используют гибкий элемент, движущая мощность может передаваться передним и задним гусеничным движущим устройствам 30C и 70C, не нарушая поднимание или колебание в вертикальном направлении.
[0273] Дополнительно, передача движущей мощности передним и задним гусеничным движущим устройствам 30C и 70C не ограничена описанной выше конфигурацией. Например, может быть предоставлено, соответственно, четыре пропорциональных электромагнитных клапана, соответствующих гусеничным движущим устройствам 30CR, 30CL, 70CR и 70CL, и, соответственно, может осуществляться управление четырьмя пропорциональными электромагнитными клапанами.
[0274] Кроме того, передние и задние гусеничные движущие устройства 30C и 70C не ограничены описанной выше конфигурацией. Например, может использоваться гусеничное движущее устройство, имеющее квадратную или трапециевидную форму на боковом изображении. Кроме того, переднее гусеничное движущее устройство 30C и заднее гусеничное движущее устройство 70C могут иметь одинаковую форму. С подобной конфигурацией уменьшается количество составных элементов, и, таким образом, улучшается производительность.
[0275] Кроме того, может быть использована конфигурация, в которой между ведущими колесами 31C и 71C и гидравлическими двигателями 37C и 77C предоставлено изменяющее скорость устройство, и движущая мощность гидравлических двигателей 37C и 77C передается ведущим колесам 31C и 71C через изменяющее скорость устройство. С подобной конфигурацией передние и задние гусеничные движущие устройства 30C и 70C кроме того могут легко приводиться в действие с требуемой мощностью.
[0276] Кроме того, соединение между гидравлическими двигателями 37C и 77C и ведущими колесами 31C и 71C передних и задних гусеничных движущих устройств 30C и 70C не ограничено описанной выше конфигурацией. Например, гидравлические двигатели 37C и 77C могут быть расположены на ведущих колесах 31C и 71C снаружи транспортного средства и могут соединяться друг с другом через шестерни. С подобной конфигурацией улучшается степень свободы в компоновке гидравлических двигателей 37C и 77C.
[0277] Кроме того, приводные устройства передних и задних гусеничных движущих устройств 30C и 70C не ограничены гидравлическими двигателями 37C и 77C. Например, вместо гидравлического двигателя ведущие колеса 31C и 71C могут вращаться с помощью электрического двигателя. В случае использования электрического двигателя движущая мощность передается от двигателя EC гусеничному движущему устройству за счет электричества (электрической энергии) и, таким образом, используют гибкий элемент, например, гибкий многожильный кабель. С подобной конфигурацией по аналогии с гидравлическими двигателями 37C и 77C, не ухудшаются подъем и колебание передних и задних гусеничных движущих устройств 30C и 70C в вертикальном направлении.
[0278] Дополнительно, при использовании гидравлического двигателя в приводных устройствах передних и задних гусеничных движущих устройств 30C и 70C, передние и задние гусеничные движущие устройства могут легко приводиться в действие за счет большой мощности. Кроме того, когда в приводных устройствах передних и задних гусеничных движущих устройств 30C и 70C используют электрический двигатель, управление является легким, а ответная реакция становится удовлетворительной.
[0279] Далее будет описано заднее устройство 90C подвески. Дополнительно, поскольку заднее устройство 90C подвески имеет горизонтальную симметричную форму, правый составной элемент при необходимости будет соответствующим образом обозначаться ссылочным обозначением R, а левый составной элемент будет соответствующим образом обозначаться ссылочным обозначением L.
[0280] Как проиллюстрировано на Фиг. 40 и 41, заднее устройство 90C подвески содержит четыре толкающих рычага 91C и 92C (91CR, 91CL, 92CR, 92CL), которые предоставлены таким образом, что два толкающих рычага расположены на каждой из правой и левой сторон заднего устройства подвески, качающийся рычаг 93C, правый и левый амортизаторы 94C (94CR, 94CL) и т.п.
[0281] толкающий рычаг 91C содержит две квадратные цилиндрических трубы (упоминаемых далее, как квадратные трубы), продолжающиеся в продольном направлении. Одна квадратная труба толкающего рычага 91C дважды изогнута в противоположных направлениях по существу в центре в продольном направлении и смещена в направлении внутренней части транспортного средства от участка изгиба до переднего конца. Другая квадратная труба толкающего рычага 91C проходит прямо без какой-либо границы изгиба и расположена на квадратной цилиндрической трубе с границей изгиба снаружи транспортного средства. По этой причине две квадратные трубы толкающего рычага 91C образованы таким образом, что участок от заднего конца до границы изгиба одной из квадратных труб соединен. Как передний, так и задний концы толкающего рычага 91C снабжены сквозным отверстием, образованным в горизонтальном направлении. Дополнительно, поскольку толкающий рычаг 92C имеет такую же форму, его описание будет пропущено.
[0282] Вращающийся вал 24C рамы 10C корпуса транспортного средства вставляют через сквозное отверстие переднего конца толкающего рычага 91C. По этой причине передней конец толкающего рычага 91C поддерживается рамой 10C корпуса транспортного средства с возможностью поворота вокруг вращающегося вала 24C, служащего в качестве оси. Кроме того, вращающийся вал 25C вставляют через сквозное отверстие переднего конца толкающего рычага 92C. По этой причине передней конец толкающего рычага 92C поддерживается рамой 10C корпуса транспортного средства с возможностью поворота вокруг вращающегося вала 25C, служащего в качестве оси.
[0283] Соединительный стержень 95C вставляют через сквозное отверстие заднего конец толкающего рычага 91C. Затем один конец соединительного элемента 96C квадратной цилиндрической трубы, имеющий сквозное отверстие, образованное на обоих ее концах, соединяют с задним концом толкающего рычага 91C через соединительный стержень 95C.
[0284] Вращающийся вал 80C, предоставленный на крепежной раме 75C заднего гусеничного движущего устройства 70C, вставляют через сквозное отверстие заднего конец толкающего рычага 92C и сквозное отверстие другого конца соединительного элемента 96C. Затем заднее гусеничное движущее устройство 70C соединяют с задним концом толкающего рычага 92C с возможностью поворота вокруг вращающегося вала 80C, служащего в качестве оси.
[0285] Дополнительно, конец соединительного стержня 95C снаружи транспортного средства снабжен стержнем 82C заднего гусеничного движущего устройства 70C в перпендикулярном направлении. По этой причине, как описано выше, диапазон поворота заднего гусеничного движущего устройства 70C в продольном направлении вокруг вращающегося вала 80C, служащего в качестве оси, относительно заднего устройства 90C подвески регулируется стержнем 82C и выемкой 81C.
[0286] В данном случае толкающие рычаги 91C и 92C не ограничены описанной выше конфигурацией. В данном случае один конец может поддерживаться рамой 10C корпуса транспортного средства с возможностью поворота относительно горизонтального направления, служащего в качестве оси, а заднее гусеничное движущее устройство 70C может быть соединено с другим концом с возможностью поворота относительно горизонтального направления, служащего в качестве оси.
[0287] Например, каждый из толкающих рычагов 91C и 92C может быть образован в виде единственной квадратной трубы. Кроме того, рама 10C корпуса транспортного средства и заднее гусеничное движущее устройство 70C могут быть соединены друг с другом только толкающим рычагом 92C. С подобной конфигурацией может быть уменьшено количество составных элементов, и, таким образом, улучшается производительность. Однако, поскольку в случае подобной конфигурации уменьшается прочность, необходимо, чтобы требуемую прочность имел механизм, соединяющий заднее гусеничное движущее устройство 70C с рамой 10C корпуса транспортного средства.
[0288] Качающийся рычаг 93C содержит листообразную пластину 97C, которая на изображении сзади имеет направленную вверх треугольную форму, цилиндрическую трубу 98C, которая проходит в продольном направлении от центра листообразной пластины 97C в горизонтальном направлении, столбчатый вал 99C, который прикреплен к нижнему концу пластины 97C и проходит в горизонтальном направлении, и т.п. Вращающийся вал 26C рамы 10C корпуса транспортного средства вставляют через цилиндрическую трубу 98C. По этой причине качающийся рычаг 93C поддерживается рамой 10C корпуса транспортного средства с возможностью поворота вокруг вращающегося вала 26C, служащего в качестве оси.
[0289] В данном случае качающийся рычаг 93C не ограничен описанной выше конфигурацией. Качающийся рычаг 93C предоставлен с продолжением в горизонтальном направлении и поддерживается рамой 10C корпуса транспортного средства в центре в горизонтальном направлении с возможностью поворота относительно продольного направления, служащего в качестве оси.
[0290] Амортизатор 94C представляет собой телескопический штангообразный амортизирующий механизм, содержащий пружину, цилиндр и т.п. Один конец левого амортизатора 94CL соединен с левым концом вала 99C качающегося рычага 93C через шаровое соединение 100CL, служащее в качестве универсального шарнира. Другой конец левого амортизатора 94CL соединен с левым толкающим рычагом 91CL через шаровое соединение 101CL, служащее в качестве универсального шарнира.
[0291] Один конец правого амортизатора 94CR соединен с правым концом вала 99C качающегося рычага 93C через шаровое соединение 100CR, служащее в качестве универсального шарнира. Другой конец правого амортизатора 94CR соединен с правым толкающим рычагом 91CL через шаровое соединение 101CR, служащее в качестве универсального шарнира.
[0292] В данном случае амортизатор 94C не ограничен описанной выше конфигурацией. Один конец амортизатора 94C может быть соединен с поворачивающимся рычагом 93C через универсальный шарнир, а другой его конец может быть соединен с задним гусеничным движущим устройством 70C через универсальный шарнир. Дополнительно, описанная выше конфигурация представляет собой конфигурацию, у которой один конец амортизатора 94C соединен с задним гусеничным движущим устройством 70C через толкающий рычаг 91C.
[0293] Например, может быть выполнено соединение с использованием вместо шарового соединения универсального шарнира крестового типа в качестве универсального шарнира. Кроме того, вместо амортизатора 94C, служащего в качестве телескопического амортизирующего механизма, может использоваться рычаг, образованный стальным элементом. Однако, для того, чтобы осуществлять стабильную операцию передвижения и улучшать комфорт во время движения, желательно использовать амортизатор 94C, служащий в качестве телескопического амортизирующего механизма. С подобной конфигурацией, поскольку нет необходимости в предоставлении отдельного амортизирующего механизма между рамой 10C корпуса транспортного средства и задним гусеничным движущим устройством 70C, уменьшается количество составных элементов, и улучшается производительность.
[0294] По этой причине подвешенные правое и левое задние гусеничные движущие устройства 70CR и 70CL взаимосвязанным образом колеблются в вертикальном направлении задним устройством 90C подвески в противоположных направлениях. Это обусловлено тем, что правое и левое задние гусеничные движущие устройства 70CR и 70CL соединены друг с другом через качающийся рычаг 93C, поддерживаемый рамой 10C корпуса транспортного средства, с возможностью поворота вокруг вращающегося вала 26C, служащего в качестве оси и продолжающегося в продольном направлении.
[0295] Кроме того, заднее гусеничное движущее устройство 70C колеблется в вертикальном направлении без передвижения в горизонтальном направлении и поворота относительно продольного направления, служащего в качестве оси. По этой причине контактирующая с землей часть 83C заднего гусеничного движущего устройства 70C все время удерживается параллельно раме 10C корпуса транспортного средства. То есть заднее гусеничное движущее устройство 70C скользит в вертикальном направлении относительно рамы 10C корпуса транспортного средства на изображении сзади. Это обусловлено тем, что правое и левое задние гусеничные движущие устройства 70CR и 70LC соединены толкающими рычагами 91CR, 92CR, 91CL и 92CL, одни концы которых поддерживаются рамой 10C корпуса транспортного средства с возможностью поворота вокруг вращающегося вала 24C или вращающегося вала 25C, продолжающихся в горизонтальном направлении, служащем в качестве оси, а другие концы которых, соответственно, поддерживаются задним гусеничным движущим устройством 70C с возможностью поворота вокруг вращающегося вала 80C, продолжающегося в горизонтальном направлении, служащем в качестве оси.
[0296] Таким образом, заднее гусеничное движущее устройство 70C может быстро следовать за изменением неровного участка неровной земли в вертикальном направлении, при этом эффективность передвижения или комфорт во время движения являются удовлетворительными. Кроме того, заднее устройство 90C подвески выполнено с возможностью подвешивания на раме 10C корпуса транспортного средства правого и левого задних гусеничных движущих устройств 70CR и 70CL в виде единого целого. Поскольку данная конфигурация является более простой, чем конфигурация, в которой гусеничные движущие устройства подвешены независимо, уменьшается количество составных элементов, а производительность или технологичность технического обслуживания становятся удовлетворительными.
[0297] Дополнительно, заднее устройство 90C подвески не ограничено описанной выше конфигурацией. Заднее гусеничное движущее устройство 70C может быть выполнено с возможностью подвешивания на раме 10C корпуса транспортного средства. Более желательно, заднее гусеничное движущее устройство 70C может быть выполнено с возможностью колебания в вертикальном направлении. Например, заднее устройство 90C подвески может не содержать толкающий рычаг 91C, качающийся рычаг 93C, амортизатор 94C и соединительный элемент 96C. То есть может быть использована конфигурация, в которой правое и левое задние гусеничные движущие устройства 70CR и 70CL подвешены на раме 10C корпуса транспортного средства с помощью толкающих рычагов 92CR и 92CL, служащих в качестве соединительных элементов, а между рамой 10C корпуса транспортного средства и толкающим рычагом 92C соединен амортизатор, который является аналогичным амортизатору 94C. Таким образом, правое и левое задние гусеничные движущие устройства 70CR и 70CL подвешены независимо на раме 10C корпуса транспортного средства. С подобной конфигурацией заднее устройство 90C подвески имеет простую конфигурацию, и, таким образом, улучшаются производительность и технологичность технического обслуживания.
[0298] Кроме того, один конец толкающего рычага 92C заднего устройства 90C подвески поддерживается рамой 10C корпуса транспортного средства, а другой его конец поддерживается задним гусеничным движущим устройством 70C. Однако, заднее устройство 90C подвески может иметь конфигурацию, в которой вместо толкающего рычага 92C между рамой 10C корпуса транспортного средства и задним гусеничным движущим устройством 70C предоставлена пара верхнего и нижнего рычагов (верхний рычаг и нижний рычаг), используемых в известной независимой двухрычажной подвеске. С подобной конфигурацией улучшается прочность соединения между рамой 10C корпуса транспортного средства и задним гусеничным движущим устройством 70C. Однако, поскольку с подобной конфигурацией уменьшается величина возможного колебания заднего гусеничного движущего устройства 70C в вертикальном направлении (величина движения в вертикальном направлении), требуется конфигурация с использованием толкающего рычага 92C.
[0299] Далее будут описаны операция передвижения и операция управления самоходным транспортным средством 1C. Как описано выше, ведущие колеса 31CR, 31CL, 71CR и 71CL приводятся в действие с возможностью вращения гидравлическими двигателями 37CR, 37CL, 77CR и 77CL гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL.
[0300] Гидравлические двигатели 37CR, 37CL, 77CR и 77CL приводятся в действие с помощью насосов (не проиллюстрировано), приводимых в действие за счет движущей мощности двигателя EC. Кроме того, когда пропорциональными электромагнитными клапанами (не проиллюстрировано), предоставленными между гидравлическими двигателями 37CR, 37CL, 77CR и 77CL и насосами, управляет контроллер (не проиллюстрировано), управление гидравлическими двигателями 37CR, 37CL, 77CR и 77CL происходит независимо. То есть движущая мощность двигателя EC независимо передается от насосов гидравлическим двигателям 37CR, 37CL, 77CR и 77CL через пропорциональные электромагнитные клапаны.
[0301] С подобной конфигурацией гусеничные движущие устройства 30CR, 30CL, 70CR и 70CL могут приводиться в действие независимо таким образом, чтобы самоходное транспортное средство 1C могло передвигаться вперед или назад и поворачивать.
[0302] Когда транспортное средство движется вперед или назад, переднее, заднее, правое и левое гусеничные движущие устройства 30CR, 30CL, 70CR и 70CL приводятся в действие с одинаковой скоростью в одном и том же направлении.
[0303] Во время операции поворота, правое переднее гусеничное движущее устройство 30CR и левое переднее гусеничное движущее устройство 30CL приводятся в действие с различной скоростью. Вследствие разницы скоростей между правым и левым передними гусеничными движущими устройствами 30CR и 30CL, переднее гусеничное движущее устройство 30C и переднее устройство 50C подвески поворачиваются вместе относительно рамы 10C корпуса транспортного средства вокруг вращающегося вала 53C переднего устройства 50C подвески, служащего в качестве оси. То есть переднее гусеничное движущее устройство 30C и переднее устройство 50C подвески поворачиваются вокруг вращающегося вала 53C. Таким образом, направление переднего гусеничного движущего устройства 30C относительно рамы 10C корпуса транспортного средства изменяется таким образом, чтобы могло изменяться направление движения самоходного транспортного средства 1C.
[0304] По этой причине, поскольку направление переднего гусеничного движущего устройства 30C относительно рамы 10C корпуса транспортного средства изменяется таким образом, что изменяется направление движения самоходного транспортного средства 1C, направление движения самоходного транспортного средства 1C может надежно изменяться.
[0305] Дополнительно, когда правое и левое передние гусеничные движущие устройства 30CR и 30CL приводятся в действие с различной скоростью, правое и левое задние гусеничные движущие устройства 70CR и 70CL также могут приводиться в действие с различной скоростью. С подобной конфигурацией самоходное транспортное средство 1C может поворачивать с маленьким радиусом, и, таким образом, операция поворота может быстро выполняться. Кроме того, самоходное транспортное средство 1C может производить нулевой поворот, и, таким образом, улучшается эффективность передвижения.
[0306] В данном случае переднее гусеничное движущее устройство 30C подвешено на раме 10C корпуса транспортного средства с помощью переднего устройства 50C подвески с возможностью большого подъема в вертикальном направлении. Кроме того, заднее гусеничное движущее устройство 70C подвешено на раме 10C корпуса транспортного средства с помощью заднего устройства 90C подвески с возможностью сильных колебаний в вертикальном направлении. Таким образом, переднее гусеничное движущее устройство 30C и заднее гусеничное движущее устройство 70C могут передвигаться или колебаться в вертикальном направлении, следуя по склону или неровному участку неровной земли. Соответственно, улучшается эффективность передвижения по неровной земле.
[0307] Кроме того, когда самоходное транспортное средство 1C движется на неровной земле, гусеничные движущие устройства 30CR, 30CL, 70CR и 70CL располагаются в разных положениях в вертикальном направлении. Однако, даже в подобном состоянии операция поворота может легко выполняться. Затем будет описана операция поворота самоходного транспортного средства 1C.
[0308] Фиг. 42 представляет собой схематичный вид сбоку справа, иллюстрирующий состояние, когда левые переднее и заднее гусеничные движущие устройства 30CL и 70CL расположены на верхней стороне относительно правых передних и задних гусеничных движущих устройств 30CR и 70CR. На Фиг. 42, пропущено описание амортизаторов 63C и 64C переднего устройства 50C подвески и описание толкающего рычага 91C, качающегося рычага 93C, амортизатора 94C и т.п. заднего устройства 90C подвески. Фиг. 43 представляет собой схематичный вид сверху Фиг. 42. На Фиг. 43, круг C1C представляет собой круг вокруг вращающегося вала 53C, линия L2C показывает центр контактирующей с землей части 43C переднего гусеничного движущего устройства 30C в продольном направлении, линия L3C показывает центр левого переднего гусеничного движущего устройства 30CL в направлении по ширине, а линия L4C показывает центр правого переднего гусеничного движущего устройства 30CR в направлении по ширине.
[0309] Как проиллюстрировано на Фиг. 42 и 43, поскольку правое и левое задние гусеничные движущие устройства 70CR и 70CL расположены в разных положениях в вертикальном направлении, левое заднее гусеничное движущее устройство 70CL расположено с задней стороны правого заднего гусеничного движущего устройства 70CR.
[0310] Дополнительно, даже когда правое и левое передние гусеничные движущие устройства 30CR и 30CL расположены в разных положениях в вертикальном направлении, не происходит смещение в продольном направлении. То есть на изображении сверху правое и левое передние гусеничные движущие устройства 30CR и 30CL все время являются аксиально симметричными друг с другом относительно вращающегося вала 53C. Это зависит от рычажного механизма 52C переднего устройства 50C подвески.
[0311] Это именно тот случай, в котором операция поворота не выполняется легко, когда правое и левое гусеничное движущее устройство смещаются друг от друга в продольном направлении в конфигурации, в которой для поворота правое и левое гусеничные движущие устройства приводятся в действие с различной скоростью. Например, когда выполняется операция правого поворота, когда левое заднее гусеничное движущее устройство 70CL находится на задней стороне относительно правого заднего гусеничного движущего устройства 70CR, операция поворота выполняется не плавно вследствие задержки правого заднего гусеничного движущего устройства 70CR. И наоборот, имеется случай, когда операция поворота выполняется легко по сравнению с нормальным состоянием (случай, когда правое и левое задние гусеничные движущие устройства 70CR и 70CL расположены в одном и том же положении в вертикальном направлении), когда в подобном состоянии выполняется операция левого поворота. Таким образом, не может выполняться операция необходимого поворота и, таким образом, управление усложняется.
[0312] Однако, правое и левое передние гусеничные движущие устройства 30CR и 30CL на изображении сверху все время являются аксиально симметричными друг с другом относительно вращающегося вала 53C без отличия в продольном направлении даже в разных положениях в вертикальном направлении. Таким образом, когда правое и левое передние гусеничные движущие устройства 30CR и 30CL приводятся в действие с различной скоростью таким образом, чтобы переднее гусеничное движущее устройство 30C и переднее устройство 50C подвески поворачивались относительно вращающегося вала 53C, требуемый поворот может выполняться без какого-либо влияния положений правого и левого передних гусеничных движущих устройств 30CR и 30CL в вертикальном направлении.
[0313] Это обусловлено тем, что усилие, передаваемое от правого и левого передних гусеничных движущих устройств 30CR и 30CL на землю, эффективно используется для поворота. Направления передачи усилия левого переднего гусеничного движущего устройства 30CL и правого переднего гусеничного движущего устройства 30CR относительно земли соответствуют направлениям линии L3C и линии L4C. линия L3C и линия L4C контактируют с кругом C1C вокруг вращающегося вала 53C в точке пересечения с линией L2C. Таким образом, усилие, передаваемое на землю в направлениях линии L3C и линии L4C, может использоваться для поворота вокруг вращающегося вала 53C без всяких потерь, и, таким образом, может легко выполняться требуемый поворот. Дополнительно, это обусловлено тем, что направление подъема переднего гусеничного движущего устройства 30C регулируется в направлении линии L1C, соответствующей направлению вала рулевого управления, рычажным механизмом 52C переднего устройства 50C подвески. Соответственно, контактирующая с землей часть 43C переднего гусеничного движущего устройства 30C движется вдоль линии L1C в вертикальном направлении. По этой причине линия L2C обычно проходит через центр (линию L1C) вращающегося вала 53C.
[0314] В данном случае Фиг. 44 представляет собой схематичный вид сбоку справа, иллюстрирующий состояние, когда переднее гусеничное движущее устройство 30C и переднее устройство 50C подвески поворачиваются вокруг вращающегося вала 53C на 900 в направлении влево (направление против часовой стрелки) из состояния Фиг. 42. Фиг. 45 представляет собой схематичный вид сверху Фиг. 44. Дополнительно, стрелка Фиг. 45 обозначает направление усилия, передаваемого от переднего гусеничного движущего устройства 30C, на землю в состоянии поворота.
[0315] Правое переднее гусеничное движущее устройство 30CR вращает гусеничную ленту 34CR в направлении движения вперед, когда транспортное средство поворачивает в направлении влево. Поскольку усилие, передаваемое от правого переднего гусеничного движущего устройства 30CR в землю, прикладывается в направлении контакта с кругом C1C вокруг вращающегося вала 53C, большая часть усилия может использоваться для поворота в направлении влево (направление против часовой стрелки). И наоборот, левое переднее гусеничное движущее устройство 30CL вращает гусеничную ленту 34CL в направлении движения назад, когда транспортное средство поворачивает в направлении влево. Поскольку усилие, передаваемое от левого переднего гусеничного движущего устройства 30CL в землю, прикладывается в направлении контакта с кругом C1C вокруг вращающегося вала 53C, большая часть усилия может использоваться для поворота в направлении влево (направление против часовой стрелки).
[0316] Таким образом, направление движения самоходного транспортного средства 1C может изменяться в то время, как правое и левое передние гусеничные движущие устройства 30CR и 30CL легко поворачиваются, даже когда правое и левое передние гусеничные движущие устройства 30CR и 30CL расположены в разных положениях в вертикальном направлении. То есть направление переднего гусеничного движущего устройства 30C относительно рамы 10C корпуса транспортного средства легко изменяется в требуемом направлении на неровной земле с неровным участком или уклоном, и, таким образом, улучшается эффективность передвижения.
[0317] Кроме того, рычажный механизм 52C переднего устройства 50C подвески изогнут в направлении передней стороны рамы 10C корпуса транспортного средства на внешней стороне рамы 51C тележки. То есть рычажный механизм 52C изогнут наружу от самоходного транспортного средства 1C. Таким образом, нет необходимости обеспечивать пространство для изгиба рычажного механизма 52C на внутренней стороне транспортного средства, и, таким образом, полная длина самоходного транспортного средства 1C может быть укорочена.
[0318] Кроме того, поскольку можно уменьшить боковое скольжение передних и задних гусеничных движущих устройств 30C и 70C, когда самоходное транспортное средство 1C движется поперек склона, эффективность передвижения, когда транспортное средство движется поперек склона, являются удовлетворительными. Переднее устройство 50C подвески может подниматься в вертикальном направлении без передвижения переднего гусеничного движущего устройства 30C в горизонтальном направлении и поворота переднего гусеничного движущего устройства относительно продольного направления, служащего в качестве оси. По этой причине контактирующая с землей часть 43C переднего гусеничного движущего устройства 30C все время удерживается параллельно раме 10C корпуса транспортного средства. То есть переднее гусеничное движущее устройство 30C скользит в вертикальном направлении относительно рамы 10C корпуса транспортного средства. Кроме того, заднее устройство 90C подвески может колебаться в вертикальном направлении без передвижения заднего гусеничного движущего устройства 70C в горизонтальном направлении и поворота заднего гусеничного движущего устройства относительно продольного направления, служащего в качестве оси. По этой причине контактирующая с землей часть 83C заднего гусеничного движущего устройства 70C все время удерживается параллельно раме 10C корпуса транспортного средства. То есть заднее гусеничное движущее устройство 70C скользит в вертикальном направлении относительно рамы 10C корпуса транспортного средства.
[0319] Таким образом, контактирующая с землей часть 43C переднего гусеничного движущего устройства 30C все время удерживается параллельно раме 10C корпуса транспортного средства, даже когда переднее гусеничное движущее устройство 30C поднимается в вертикальном направлении, чтобы следовать наклону склона, когда транспортное средство движется поперек склона. Кроме того, по аналогии с передним гусеничным движущим устройством 30C, контактирующая с землей часть 83C заднего гусеничного движущего устройства 70C все время удерживается параллельно раме 10C корпуса транспортного средства. Таким образом, когда самоходное транспортное средство 1C наклоняется в направлении стороны гребня склона таким образом, что рама 10C корпуса транспортного средства остается по существу горизонтальной, боковая часть со стороны гребня, контактирующей с землей части 43C переднего гусеничного движущего устройства 30C и боковая часть со стороны гребня, контактирующей с землей части 83C заднего гусеничного движущего устройства 70C могут вгрызаться в склон, с использованием в то же время в качестве кромок. По этой причине, поскольку на склоне вряд ли возникает боковое скольжение передних и задних гусеничных движущих устройств 30C и 70C, эффективность передвижения или комфорт во время движения, когда транспортное средство движется по склону, являются удовлетворительными.
[0320] Далее будет описана операция передвижения самоходного транспортного средства 1C. Как описано выше, самоходное транспортное средство 1C может передвигаться вперед или назад и поворачивать за счет независимого управления гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL с использованием контроллера.
[0321] Более конкретно, регулирование пропорциональных электромагнитных клапанов происходит на основании выявленного значения датчика рукояти, выявляющего угол поворота вала 115C рулевого управления и выявления значения датчика ручки акселератора, выявляющего угол поворота ручки 117C акселератора таким образом, чтобы изменять направления передвижения и скорости гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL. Таким образом, поскольку операция передвижения самоходного транспортного средства 1C может выполняться за счет регулирования пропорционального электромагнитного клапана, производительность или технологичность технического обслуживания являются удовлетворительными.
[0322] Дополнительно, в описанной выше конфигурации управление гусеничными движущими устройствами 30CR, 30CL, 70CR и 70CL происходит на основании выявленных значений, полученных от датчика рукояти и датчика ручки акселератора, и соответствующей величины воздействия водителя на рукоять 114C и ручку 117C акселератора, но изобретение не ограничено данной конфигурацией. Управление гусеничными движущими устройствами 30CR, 30CL, 70CR и 70CL может происходить на основании по меньшей мере выявленных значений, полученных от датчика рукояти и датчика ручки акселератора, и соответствующей величины воздействия водителя. Например, как проиллюстрировано на Фиг. 46, могут быть предоставлены различные датчики, выявляющие состояние при передвижении самоходного транспортного средства 1C, а управление может выполняться на основании выявленных значений различных датчиков.
[0323] Датчик, выявляющий состояние при передвижении самоходного транспортного средства 1C, включает датчик S1C угла поворота рулевого механизма, который выявляет угол поворота переднего устройства 50C подвески относительно рамы 10C корпуса транспортного средства, два датчика S2CR и S2CL первого рычага, которые выявляют, соответственно, угол поворота второго рычажного элемента 57C относительно первого рычажного элемента 56C в соединительной части 61C правого и левого рычажных механизмов 52C, два датчика S3CR и S3CL второго рычага, которые выявляют, соответственно, угол поворота четвертого рычажного элемента 59C относительно третьего рычажного элемента 58C в соединительной части 62C правого и левого рычажных механизмов 52C, четыре датчика S4CR, S4CL, S5CR и S5CL вращения гусениц, которые выявляют, соответственно, число оборотов ведущих валов 39CR, 39CL, 79CR и 79CL гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL, четыре датчика S6CR, S6CL, S7CR и S7CL крутящего момента, которые выявляют, соответственно, крутящие моменты на выходных валах гидравлических двигателей 37CR, 37CL, 77CR и 77CL гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL. Затем контроллер CC управляет гусеничными движущими устройствами 30CR, 30CL, 70CR и 70CL на основании выявленных значений различных датчиков наряду с датчиком S8C рукояти и датчик S9C ручки акселератора.
[0324] В данном случае направление движения самоходного транспортного средства 1C может быть выявлено посредством датчика S1C угла поворота рулевого механизма. Кроме того, состояния подъема гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL в вертикальном направлении могут быть обнаружены посредством датчиков S2CR и S2CL первого рычага и датчиков S3CR и S3CL второго рычага. На основании выявленных значений (углов поворота) датчиков S2CR и S2CL первого рычага и датчиков S3CR и S3CL второго рычага, контроллер CC рассчитывает смещения подъема гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL. То есть датчики S2CR и S2CL первого рычага и датчики S3CR и S3CL второго рычага представляют собой датчики подъема, которые могут выявлять телескопическое состояние при передвижении рычажного механизма 52C в вертикальном направлении и выявляют состояния подъема гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL на основании состояния рычажного механизма 52C. Кроме того, состояния контакта с землей (дорожные условия) гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL могут выявляться посредством датчиков S4CR, S4CL, S5CR и S5CL вращения гусениц и датчиков S6CR, S6CL, S7CR и S7CL крутящего момента. Кроме того, операция передвижения водителя может выявляться датчиком S8C рукояти и датчиком S9C ручки акселератора.
[0325] Таким образом, состояние при передвижении самоходного транспортного средства 1C может подробно проверяться с помощью различных датчиков. По этой причине, поскольку контроллер CC может управлять гусеничными движущими устройствами 30CR, 30CL, 70CR и 70CL в ответ на состояние при передвижении самоходного транспортного средства 1C для операций водителя с рукоятью и акселератором, эффективность передвижения самоходного транспортного средства 1C улучшается.
[0326] Дополнительно, тип различных датчиков не имеет особых ограничений. Например, для выявления угла поворота используют потенциометр или кодовый датчик.
[0327] Кроме того, контроллер CC может периодически сохранять выявленные значения различных датчиков и может управлять устройствами на основании выявленных значений различных датчиков и изменять их величины. Например, контроллер CC может быть выполнен с возможностью расчета смещения подъема гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL на основании выявленных значений датчиков S2CR и S2CL первого рычага и датчиков S3CR и S3CL второго рычага и с возможностью расчета скоростей подъема гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL на основании периодического изменения смещения подъема. С подобной конфигурацией состояния подъема гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL может проверяться за счет смещения подъема и скорости подъема. Таким образом, поскольку может проверяться подробное состояние при передвижении самоходного транспортного средства 1C, улучшается эффективность передвижения самоходного транспортного средства 1C.
[0328] Кроме того, конфигурации различных датчиков для проверки состояния передвижения не имеют особых ограничений. Например, датчиком подъема, который выявляет состояния подъема гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL в вертикальном направлении, может быть датчик, который выявляет расстояние между рамой 10C корпуса транспортного средства и землей. В связи с этим может использоваться выявляющий расстояние датчик, ультразвуковой датчик расстояния или инфракрасный датчик расстояния. Дополнительно, датчиком подъема желательно могут быть датчики S2CR и S2CL первого рычага и датчики S3CR и S3CL второго рычага. В данном случае состояния подъема гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL в вертикальном направлении по сравнению с датчиком расстояния могут выявляться более точно.
[0329] Кроме того, датчик ускорения может быть предоставлен в раме 10C корпуса транспортного средства, раме 51C тележки или на гусеничных движущих устройствах 30CR, 30CL, 70CR и 70CL. С подобной конфигурацией может проверяться более подробное состояние при передвижении самоходного транспортного средства 1C.
[0330] Кроме того, для выявления угла наклона самоходного транспортного средства 1C относительно горизонтальной плоскости может быть дополнительно предоставлен датчик наклона. В связи с этим может использоваться датчик наклона, гиродатчик или т.п. Дополнительно, датчик наклона может использоваться для выявления по меньшей мере угла крена в качестве наклона в горизонтальном направлении. Кроме того, в качестве наклона в продольном направлении может выявляться угол продольного наклона. С подобной конфигурацией, поскольку угол наклона самоходного транспортного средства 1C относительно горизонтальной плоскости может выявляться более подробно, может улучшаться эффективность передвижения и устойчивость самоходного транспортного средства 1C.
[0331] Кроме того, могут предоставляться различные датчики, и количество датчиков не ограничено. Например, может быть предоставлен только один из датчиков S2CR и S2CL первого рычага и датчиков S3CR и S3CL второго рычага, служащих в качестве датчиков подъема. Кроме того, может быть предоставлен датчик, который выявляет угол поворота первого рычажного элемента 56C или третьего рычажного элемента 58C относительно рамы 51C тележки, или датчик, который выявляет угол поворота второго рычажного элемента 57C или четвертого рычажного элемента 59C относительно соединительной рамы 36C переднего гусеничного движущего устройства 30C. Дополнительно, может быть желательно предоставлять множество различных датчиков. С подобной конфигурацией состояние при передвижении самоходного транспортного средства 1C может проверяться с более высокой точностью. Кроме того, заднее гусеничное движущее устройство 70C или заднее устройство 90C подвески может содержать описанный выше датчик.
[0332] Кроме того, может предоставляться устройство предупреждения, которым управляет контроллер CC на основании выявленных значений различных датчиков. Например, может предоставляться устройство предупреждения, которым управляют на основании выявленного значения датчика наклона. С подобной конфигурацией можно упреждать уклон, который неожиданно появляется, когда водитель ведет транспортное средство, и, таким образом, предотвращать ситуацию, в которой легко возникают боковое скольжение и переворот. Соответственно, дополнительно улучшается безопасность. Дополнительно, устройство предупреждения не имеет особых ограничений, и может использоваться для предупреждения водителя. Например, устройство предупреждения может предупреждать водителя с помощью звука или света. Кроме того, может использоваться генерирующее предупреждающий звук устройство или устройство с мигающей лампой. Кроме того, устройством предупреждения может быть устройство аварийной остановки, которое останавливает передние и задние гусеничные движущие устройства 30 и 70.
[0333] Дополнительно, переднее устройство 50C подвески не ограничено описанной выше конфигурацией и может быть выполнено с возможностью подъема в вертикальном направлении переднего гусеничного движущего устройства 30C вдоль вращающегося вала 53C (линия L1C), служащего в качестве вала рулевого управления. В данном случае направление подъема переднего гусеничного движущего устройства 30C определяется конфигурацией рычажного механизма 52C, служащего в качестве соединительного механизма.
[0334] Например, соединительный механизм может не содержать в рычажном механизме 52C пятый рычажный элемент 60C. В это время вместо амортизаторов 63C и 64C могут быть предоставлены амортизатор, который выдвигается в вертикальном направлении в то время, как один конец соединен с возможностью вращения с рамой 51C тележки, а другой конец соединен с возможностью вращения с третьим рычажным элементом 58C, и амортизатор, который выдвигается в вертикальном направлении в то время, как один конец соединен с возможностью вращения с соединительной рамой 36C, а другой конец соединен с возможностью вращения с четвертым рычажным элементом 59C. С подобной конфигурацией, улучшается производительность, поскольку может быть уменьшено количество составных элементов. Дополнительно, поскольку в случае подобной конфигурации уменьшается прочность соединительного механизма, необходимо содержание пятого рычажного элемента 60C.
[0335] Кроме того, вместо амортизаторов 63C и 64C может предоставляться соединительный механизм таким образом, чтобы рычажный механизм 52C содержал амортизатор, который выдвигается в вертикальном направлении в то время, как один конец соединен с возможностью поворота с первым рычажным элементом 56C, а другой конец соединен с возможностью поворота со вторым рычажным элементом 57C. С подобной конфигурацией улучшается производительность, поскольку может быть уменьшено количество составных элементов.
[0336] Кроме того, соединительный механизм может иметь конфигурацию, в которой в рычажном механизме 52C соединительная часть 62 между третьим рычажным элементом 58C и четвертым рычажным элементом 59C изогнута назад. То есть соединительным механизмом может быть так называемый механизм пантограф, соответствующий рычажному механизму, имеющему на боковом изображении по существу ромбовидную форму. С подобной конфигурацией улучшается производительность или технологичность технического обслуживания, поскольку соединительный механизм становится простым. Кроме того, улучшается устойчивость телескопического движения рычажного механизма.
[0337] Кроме того, соединительный механизм может иметь конфигурацию, в которой первый рычажный элемент 56C и второй рычажный элемент 57C рычажного механизма 52C соединены, соответственно, с пятым рычажным элементом 60C, а его третий рычажный элемент 58C и четвертый рычажный элемент 59C соединены, соответственно, с пятым рычажным элементом 60C. То есть первый рычажный элемент 56C, второй рычажный элемент 57C, третий рычажный элемент 58C и четвертый рычажный элемент 59C могут быть соединены друг с другом через пятый рычажный элемент 60C. С подобной конфигурацией улучшается производительность или технологичность технического обслуживания, поскольку конфигурация соединительной части становится простой.
[0338] Кроме того, соединительный механизм представляет собой телескопический цилиндр, содержащий поршневой шток, который содержит поршневую головку и гильзу цилиндра, имеющую нижнюю часть определенного типа, в которую можно вставлять поршневую головку. В данном случае один конец цилиндра может быть прикреплен к раме 51C тележки, а другой его конец может быть прикреплен к соединительной раме 36C переднего гусеничного движущего устройства 30C с возможностью поворота относительно горизонтального направления, служащего в качестве оси. Дополнительно, по аналогии с амортизаторами 63C и 64C, цилиндр может содержать пружину. С подобной конфигурацией поскольку соединительный механизм становится простым, улучшается производительность или технологичность технического обслуживания.
[0339] Кроме того, амортизаторы 63C и 64C, служащие в качестве амортизирующих механизмов, не ограничены описанной выше конфигурацией. Может быть предоставлена любая конструкция, способная уменьшить столкновение между рамой 10C корпуса транспортного средства и передним гусеничным движущим устройством 30C, а может использоваться конструкция, содержащая только пружину или цилиндр.
[0340] В данном случае переднее устройство 50C подвески может содержать подъемное устройство, которое поднимает правое и левое передние гусеничные движущие устройства 30R и 30L. Например, также может использоваться переднее устройство 50D подвески, проиллюстрированное на Фиг. 47, 48 и 49. В данном случае Фиг. 47 представляет собой вид сбоку справа, иллюстрирующий пример переднего устройства 50D подвески согласно еще одному варианту осуществления, Фиг. 48 представляет собой вид сбоку, иллюстрирующий переднее устройство 50D подвески Фиг. 47, если смотреть с внутренней стороны транспортного средства, Фиг. 49A и 49B представляют собой схематичные изображения, иллюстрирующие работу переднего устройства 50D подвески Фиг. 48, Фиг. 49A иллюстрирует состояние, когда соединительный механизм Фиг. 48 удлинен, а Фиг. 49B иллюстрирует состояние, когда соединительный механизм Фиг. 48 укорочен.
[0341] Как проиллюстрировано на Фиг. 47 и 48, переднее устройство 50D подвески содержит раму тележки 51D, рычажные механизмы 52D, которые служат в качестве пары из правого и левого соединительных механизмов, соединяющих правое и левое передние гусеничные движущие устройства 30CR и 30CL, соответственно, с правой и левой сторонами рамы 51D тележки, цилиндры 400DR и 400DL, которые служат в качестве подъемного устройства, поднимающего правое и левое передние гусеничные движущие устройства 30CR и 30CL, и т.п. Дополнительно, на Фиг. 47 и 48 пропущено описание левого рычажного механизма 52DL, левого переднего гусеничного движущего устройства 30CL и левого цилиндра 400DL.
[0342] Рама 51D тележки является аналогичной раме 51C тележки переднего устройства 50C подвески. Рама 51D тележки имеет по существу прямоугольную кубическую форму, продолжающуюся на изображении сверху в продольном направлении, а вращающийся вал 53D, используемый в качестве вала рулевого управления, вертикально проходит от центра верхней поверхности в горизонтальном направлении. Вращающийся вал 53D вставляют через сквозное отверстие 27C передней опорной пластины 18C. По этой причине рама 51D тележки соединена с передней опорной пластиной 18C с возможностью поворота вокруг вращающегося вала 53D, служащего в качестве оси. То есть рама тележки 51 поддерживается рамой 10C корпуса транспортного средства с возможностью поворота относительно вертикального направления, служащего в качестве оси. Дополнительно, линия L1D на Фиг. 47, 48 и 49 показывает центр вращающегося вала 53D (центр вращения рамы 51D тележки), соответствует осевому направлению вала рулевого управления и предоставлена в вертикальном направлении.
[0343] Кроме того, на правой и левой боковых поверхностях рамы 51D тележки вертикально предоставлены вращающийся вал 54D (54DR, 54DL) и вращающийся вал 55D (55DR, 55DL). Вращающийся вал 54D и вращающийся вал 55D предоставлены в линейных симметричных положениях относительно линии L1D.
[0344] Дополнительно, рама 51D тележки не ограничена описанной выше конфигурацией и может поддерживаться рамой 10C корпуса транспортного средства с возможностью поворота вокруг вала рулевого управления, расположенного в вертикальном направлении и служащего в качестве оси. Кроме того, направление вращающегося вала 53D, служащего в качестве вала рулевого управления рамы 51D тележки, не ограничено вертикальным направлением, и вращающийся вал 53D может иметь угол продольного наклона, при котором передняя часть является низкой, а задняя часть является высокой. Таким образом, когда вращающийся вал 53D имеет угол продольного наклона, улучшаются эффективность передвижения и долговечность. Дополнительно, когда вращающийся вал 53D расположен в вертикальном направлении, конфигурация переднего устройства 50D подвески становится простой, а производительность является высокой.
[0345] Рычажный механизм 52D содержит первый рычажный элемент 56D, второй рычажный элемент 57D, третий рычажный элемент 58D, четвертый рычажный элемент 59D и пятый рычажный элемент 60D. Первый рычажный элемент 56D, второй рычажный элемент 57D, третий рычажный элемент 58D и четвертый рычажный элемент 59D имеют одинаковую форму и образованы в виде штангообразного элемента, изогнутого с по существу дугообразной формой. Пятый рычажный элемент 60D содержит два листообразных элемента, продолжающихся в продольном направлении и имеющим по существу прямоугольную форму на боковом изображении. При соединении пяти рычажных элементов 56D, 57D, 58D, 59D и 60D, получается рычажный механизм 52D.
[0346] Один конец первого рычажного элемента 56D соединен с вращающимся валом 54D рамы 51D тележки, а другой его конец соединен с соединительной частью 61D поблизости от переднего конца пятого рычажного элемента 60D. Один конец второго рычажного элемента 57D соединен с соединительной частью 62D поблизости от переднего конца пятого рычажного элемента 60D, а другой его конец соединен с вращающимся валом 44C соединительной рамы 36C переднего гусеничного движущего устройства 30C. Один конец третьего рычажного элемента 58D соединен с вращающимся валом 55D рамы 51D тележки, а другой его конец соединен с соединительной частью 63D по существу в центре пятого рычажного элемента 60D в продольном направлении. Один конец четвертого рычажного элемента 59D соединен с соединительной частью 64D по существу в центре пятого рычажного элемента 60D в продольном направлении, а другой его конец соединен с вращающимся валом 45C соединительной рамы 36C переднего гусеничного движущего устройства 30C.
[0347] В данном случае пятый рычажный элемент 60D содержит листообразный элемент, расположенный на внутренней стороне транспортного средства, и листообразный элемент, расположенный снаружи транспортного средства. Затем между двумя листообразными элементами пятого рычажного элемента 60D помещают концы других рычажных элементов 56D, 57D, 58D, и 59D, и пятый рычажный элемент 60D соединяют с другими рычажными элементами 56D, 57D, 58D и 59D. Рычажные элементы 56D, 57D, 58D и 59D, соответственно, могут поворачиваться вокруг соединительных частей 61D, 62D, 63D и 64D, служащих в качестве осей. Кроме того, два листообразных элемента пятого рычажного элемента 60D соединены друг с другом посредством сварки соединительного элемента (не проиллюстрировано) на переднем конце, заднем конце и между соединительной частью 61D и соединительной частью 63D.
[0348] В данном случае рычажный механизм 52D имеет вертикально симметричную конструкцию относительно пятого рычажного элемента 60D. По этой причине расстояние между вращающимся валом 54D и соединительной частью 61D, расстояние между соединительной частью 62D и вращающимся валом 44C, расстояние между вращающимся валом 55D и соединительной частью 63D, и расстояние между соединительной частью 64D и вращающимся валом 45C равны друг другу. Кроме того, расстояние между вращающимся валом 44C и вращающимся валом 45C, расстояние между вращающимся валом 54D и вращающимся валом 55D, расстояние между соединительной частью 61D и соединительной частью 63D, и расстояние между соединительной частью 62D и соединительной частью 64D равны друг другу. Кроме того, первый рычажный элемент 56D, второй рычажный элемент 57D, третий рычажный элемент 58D и четвертый рычажный элемент 59D соединены друг с другом таким образом, что изогнутая форма выступает вперед.
[0349] цилиндр 400D, служащий в качестве подъемного устройства, содержит поршневой шток 401D, который имеет поршневую головку (не проиллюстрировано), гильзу цилиндра 402D, имеющую нижнюю часть определенного типа, в которую можно вставлять поршневую головку, и т.п. цилиндр 400D прикреплен в вертикальном направлении к центру листообразного элемента пятого рычажного элемента 60D, который расположен на внутренней стороне транспортного средства. И цилиндр 400D проходит в продольном направлении.
[0350] Более конкретно, гильза 402D цилиндра содержит кронштейны 403D, предоставленные поблизости от отверстия и дна, кронштейны 403D являются неподвижными за счет использования болта на листообразном элементе пятого рычажного элемента 60D, который расположен на внутренней стороне транспортного средства. Нижняя часть гильзы 402D цилиндра находится поблизости от задней части пятого рычажного элемента 60D, и цилиндр 400D может двигаться телескопическим образом в продольном направлении вдоль пятого рычажного элемента 60D. Дополнительно, цилиндр 400D прикреплен к пятому рычажному элементу 60D через резиновый лист (не проиллюстрировано).
[0351] Конец поршневого штока 401D напротив поршневой головки соединен с первым рычажным элементом 56D и вторым рычажным элементом 57D через амортизатор 404D и рычажный механизм 405D, служащие в качестве соединительного элемента. Амортизатор 404D представляет собой телескопический штангообразный амортизирующий механизм, содержащий пружину, цилиндр и т.п., и один его конец прикреплен к концу поршневого штока 401D. Рычажный механизм 405D имеет вертикально симметричную конструкцию и содержит дугообразный опорный элемент 406D, который изогнут вперед, две соединительные штанги 407D и 408D, которые соединены с опорным элементом 406D, и т.п. Опорный элемент 406D прикреплен к амортизатору 404D. Один конец соединительной штанги 407D соединен с верхним концом опорного элемента 406D, а другой его конец соединен с кронштейном 65D первого рычажного элемента 56D. Один конец соединительной штанги 408D соединен с нижним концом опорного элемента 406D, а другой его конец соединен с кронштейном 66D второго рычажного элемента 57D. Две соединительные штанги 407D и 408D расположены в вертикально симметричных положениях, а рычажный механизм 405D имеет вертикально симметричную форму относительно пятого рычажного элемента 60D.
[0352] Таким образом, рычажный механизм 405D выполнен с возможностью равной передачи усилия, генерируемого за счет телескопического движения цилиндра 400D, первому рычажному элементу 56D и второму рычажному элементу 57D в вертикально симметричном направлении. Дополнительно, вращающийся вал 40C переднего гусеничного движущего устройства 30C находится на линии L1D, и на ней также расположен центр контактирующей с землей части 43C переднего гусеничного движущего устройства 30C.
[0353] Как проиллюстрировано на Фиг. 49A и 49B, когда цилиндр 400D движется телескопическим образом в продольном направлении, рычажный механизм 405D движется телескопическим образом в вертикальном направлении, а рычажный механизм 52D, сгибаемый вперед, деформируется в продольном направлении, двигаясь телескопическим образом в вертикальном направлении. По этой причине переднее гусеничное движущее устройство 30C поднимается в вертикальном направлении в ответ на телескопическое движение цилиндра 400D. В данном случае рычажный механизм 52D выполнен с возможностью подъема переднего гусеничного движущего устройства 30C в вертикальном направлении вдоль линии L1D (вала рулевого управления).
[0354] Это обусловлено тем, что верхний рычажный механизм, содержащий первый рычажный элемент 56D, третий рычажный элемент 58D и пятый рычажный элемент 60D, и нижний рычажный механизм, содержащий второй рычажный элемент 57D, четвертый рычажный элемент 59D и пятый рычажный элемент 60D, являются вертикально симметричными друг другу, а усилие, генерируемое за счет телескопического движения цилиндра 400D, одинаково прикладывается к верхнему и нижнему рычажным механизмам в вертикально симметричном направлении.
[0355] Кроме того, переднее устройство 50D подвески используется для подъема переднего гусеничного движущего устройства 30C в вертикальном направлении и в отличие от заднего устройства 90C подвески не содержит элемент выдвижения вперед или назад, обеспечивающий возможность колебания гусеничного движущего устройства в вертикальном направлении. Таким образом, поскольку полная длина самоходного транспортного средства 1C может быть укорочена, может легко выполняться операция движения с поворотом, и улучшается эффективность передвижения.
[0356] В данном случае цилиндр 400D, служащий в качестве подъемного устройства, поднимающего переднее гусеничное движущее устройство 30C, приводится в движение за счет движущей мощности двигателя EC. Движущая мощность двигателя EC передается насосу (не проиллюстрировано), предоставленному на раме 10C корпуса транспортного средства, и дополнительно передается в цилиндр 400D через пропорциональный электромагнитный клапан (не проиллюстрировано). По этой причине, когда регулирование пропорционального электромагнитного клапана происходит таким образом, что цилиндр 400D движется телескопическим образом, переднее гусеничное движущее устройство 30C может подниматься.
[0357] Таким образом, поскольку переднее гусеничное движущее устройство 30C может подниматься, следуя по склону или неровному участку неровной земли, и может быть получен такой же эффект, как эффект на переднем устройстве 50C подвески, транспортное средство может устойчиво двигаться по неровной земле. Дополнительно, будет пропущен такой же эффект, как эффект на переднем устройстве 50C подвески. Соответственно, можно получить эффект, при котором направление переднего гусеничного движущего устройства 30C относительно рамы 10C корпуса транспортного средства легко изменяется в требуемом направлении на неровной земле с неровным участком или уклоном, или эффективность передвижения или комфорт во время движения, когда транспортное средство движется поперек склона, являются удовлетворительными.
[0358] Дополнительно, поскольку подъемное устройство, поднимающее переднее гусеничное движущее устройство 30C, выполнено просто в виде одного цилиндра 400D, производительность и технологичность технического обслуживания являются удовлетворительными. Кроме того, подъемным устройством являются цилиндр 400D, и тяжелое переднее гусеничное движущее устройство 30C также может легко подниматься. Кроме того, поскольку цилиндр 400D соединен с рычажным механизмом 52D через амортизатор 404D, служащий в качестве амортизирующего механизма, уменьшается столкновение между рамой 10C корпуса транспортного средства и передним гусеничным движущим устройством. Соответственно, переднее гусеничное движущее устройство 30C устойчиво контактирует с землей, и улучшается эффективность передвижения или комфорт во время движения. Кроме того, цилиндр 400D прикреплен к рычажному механизму 52D через резиновый лист, служащий в качестве упругого тела, и по аналогии с амортизатором 404D резиновый лист уменьшает столкновение между рамой 10C корпуса транспортного средства и передним гусеничным движущим устройством 30C.
[0359] В данном случае цилиндр 400D может приводиться в действие в ответ на действие водителя. Например, может быть использована конфигурация, в которой на каждой из правой и левой подножек 118C предоставлена педаль, а цилиндр 400D приводится в действие в ответ на величину шагового воздействия водителя на правую и левую педаль. Однако, существует множество случаев, в которых водитель не может легко приводить в действие с подъемом правое и левое передние гусеничные движущие устройства 30C таким образом, чтобы правое и левое передние гусеничные движущие устройства следовали уклону или неровному участку неровной земли. Таким образом, необходимо управлять цилиндром 400D, служащим в качестве подъемного устройства с помощью различных датчиков и контроллера. С такой конфигурацией, например, как проиллюстрирована на Фиг. 50, для выявления состояния передвижения самоходного транспортного средства 1C могут быть предоставлены различные датчики, а управление может выполняться на основании выявленных значений различных датчиков.
[0360] Датчик, выявляющий состояние при передвижении самоходного транспортного средства 1C, включает в себя датчик угла S1D поворота рулевого механизма, который выявляет угол поворота переднего устройства 50D подвески относительно рамы 10C корпуса транспортного средства, два правых и левых датчика S2DR и S2DL первого рычага, которые выявляют угол поворота второго рычажного элемента 57D относительно первого рычажного элемента 56D в правом и левом рычажном механизме 52D, два правых и левых датчика S3DR и S3DL второго рычага, которые выявляют угол поворота четвертого рычажного элемента 59D относительно третьего рычажного элемента 58D в правом и левом рычажном механизме 52D, четыре датчика S4CR, S4CL, S5CR и S5CL вращения гусениц, которые выявляют число оборотов ведущих валов 39CR, 39CL, 79CR и 79CL гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL, четыре датчика S6CR, S6CL, S7CR и S7CL крутящего момента, которые выявляют крутящие моменты на выходных валах гидравлических двигателей 37CR, 37CL, 77CR и 77CL гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL, датчик S10D наклона, который выявляет угол наклона рамы 10C корпуса транспортного средства относительно горизонтальной плоскости, и т.п.
[0361] Дополнительно, два правых и левых датчика S2DR и S2DL первого рычага и два правых и левых датчика S3DR и S3DL второго рычага соответствуют двум правым и левым датчикам S2SR и S2SL первого рычага и двум правым и левым датчикам S3SR и S3SL второго рычага, проиллюстрированным на Фиг. 46. По этой причине конфигурация, проиллюстрированная на Фиг. 50, получается за счет дополнительного предоставления датчика S10D наклона и цилиндров 400D, служащих в качестве подъемного устройства в конфигурации, проиллюстрированной на Фиг. 46. По этой причине контроллер CC управляет гусеничными движущими устройствами 30CR, 30CL, 70CR и 70CL и цилиндрами 400D, служащими в качестве подъемного устройства, на основании выявленных значений различных датчиков наряду с датчиком S8 рукояти и датчиком S9 ручки акселератора.
[0362] С подобной конфигурацией состояние при передвижении самоходного транспортного средства 1C может подробно проверяться с помощью различных датчиков. По этой причине, поскольку контроллер CC может управлять гусеничными движущими устройствами 30CR, 30CL, 70CR и 70CL в ответ на состояние при передвижении самоходного транспортного средства 1C за счет приведения водителем в действие рукояти и акселератора, эффективность передвижения самоходного транспортного средства 1C улучшается. Кроме того, поскольку управление цилиндрами 400D, служащими в качестве подъемного устройства, происходит на основании выявленного значения датчика S10D наклона, рама 10C корпуса транспортного средства может удерживаться горизонтально, и, таким образом, улучшается эффективность передвижения или комфорт во время движения для неровной земли.
[0363] Кроме того, управление движением самоходного транспортного средства 1C посредством контроллера CC не ограничено описанной выше управляющей конфигурацией. Например, может предоставляться управление включением/выключением, которое приводит в действие цилиндры 400D, служащие в качестве подъемного устройства, на основании угла крена в качестве наклона в горизонтальном направлении самоходного транспортного средства 1C, обнаруженного датчиком S10D наклона, или смещения подъема гусеничных движущих устройств 30CR, 30CL, 70CR и 70CL, обнаруженного посредством датчиков S2DR и S2DL первого рычага и датчиков SDR и S3DL второго рычага. То есть может предоставляться управление включением/выключением, которое приводит в действие цилиндры 400D в ответ на состояние при передвижении.
[0364] С подобной управляющей конфигурацией, например, когда неровный участок или уклон проезжей дороги меньше, чем предварительно определенное значение, транспортное средство движется с прекращением в то же время приведения в действие цилиндров 400D, и только когда неровный участок или уклон больше, чем предварительно определенное значение, транспортное средство движется в то время, как цилиндры 400D приводятся в действие. Поскольку время приведения в действие цилиндров 400D в состоянии передвижения уменьшается, самоходное транспортное средство 1C может двигаться с большой эффективностью использования энергии. Дополнительно, управление включением/выключением для приведения в движение цилиндров 400D не ограничено управлением с использованием контроллера CC и может выполняться в ответ на действие водителя.
[0365] Дополнительно, переднее устройство 50D подвески, содержащее подъемное устройство для подъема правого и левого передних гусеничных движущих устройств 30CR и 30CL не ограничено описанной выше конфигурацией, и переднее гусеничное движущее устройство 30C может подниматься в вертикальном направлении вдоль вращающегося вала 53D (линия L1D), служащего в качестве вала рулевого управления. В данном случае направление подъема переднего гусеничного движущего устройства 30C определяется конфигурацией рычажного механизма 52D, служащего в качестве соединительного механизма, и конфигурацией цилиндра 400D, служащего в качестве подъемного устройства.
[0366] Например, в рычажном механизме 52D, первый рычажный элемент 56D соединен со вторым рычажным элементом 57D через пятый рычажный элемент 60D, а третий рычажный элемент 58D соединен с четвертым рычажным элементом 59D через пятый рычажный элемент 60D. Однако, по аналогии с рычажным механизмом 52C переднего устройства 50C подвески, может быть выполнено соединение без использования пятого рычажного элемента 60D.
[0367] Кроме того, соединительный механизм может иметь конфигурацию, в которой третий рычажный элемент 58D и четвертый рычажный элемент 59D в рычажном механизме 52D согнуты назад. То есть соединительным механизмом может быть так называемый механизм пантограф, соответствующий рычажному механизму, имеющему на боковом изображении по существу ромбовидную форму. С подобной конфигурацией, поскольку соединительный механизм становится простым, улучшается производительность или технологичность технического обслуживания. Кроме того, улучшается устойчивость телескопического движения рычажного механизма.
[0368] Кроме того, переднее устройство 50D подвески может иметь конфигурацию, в которой вместо соединительных штанг 407D и 408D в рычажном механизме 405D предоставлен амортизатор, служащий в качестве амортизирующего механизма. То есть амортизатор может быть предоставлен между опорным элементом 406D и кронштейном 65D и между опорным элементом 406D и кронштейном 66D. С подобной конфигурацией, поскольку столкновение между рамой 10C корпуса транспортного средства и передним гусеничным движущим устройством 30C может уменьшаться более эффективно, транспортное средство движется устойчиво, и улучшается комфорт во время движения.
[0369] Кроме того, подъемное устройство не ограничено цилиндром 400D. Например, как проиллюстрировано на Фиг. 51, подъемное устройство может содержать цилиндр 410D, который предоставлен между рамой 51D тележки и передним гусеничным движущим устройством 30C. Один конец цилиндра 410D прикреплен к раме 51D тележки с возможностью поворота относительно горизонтального направления, служащего в качестве оси. Другой конец цилиндра 410D прикреплен к соединительной раме 36C переднего гусеничного движущего устройства 30C через амортизатор 411D, служащий в качестве амортизирующего механизма с возможностью поворота относительно горизонтального направления, служащего в качестве оси.
[0370] Кроме того, в конфигурации, проиллюстрированной на Фиг. 51, предоставлены амортизаторы 412D и 413D, служащие в качестве амортизирующих механизмов. Один конец амортизатора 412D прикреплен с возможностью вращения к кронштейну 65D первого рычажного элемента 56D, а другой его конец прикреплен с возможностью вращения к пятому рычажному элементу 60D. Один конец амортизатора 413D прикреплен с возможностью вращения к кронштейну 66D второго рычажного элемента 57D, а другой его конец прикреплен с возможностью вращения к пятому рычажному элементу 60D. Два амортизатора 412D и 413D расположены в вертикально симметричных положениях относительно пятого рычажного элемента 60D. И два амортизатора 412D и 413D при передвижении телескопическим образом генерируют одинаковое амортизирующее усилие.
[0371] Таким образом, когда цилиндр 410D передвигается телескопическим образом, переднее гусеничное движущее устройство 30C может подниматься в вертикальном направлении вдоль вращающегося вала 53D (линия L1D), служащего в качестве вала рулевого управления. С подобной конфигурацией усилие, генерируемое за счет телескопического движения цилиндра 410D, служащего в качестве подъемного устройства, прикладывается в вертикальном направлении, и, таким образом, переднее гусеничное движущее устройство 30C может подниматься более эффективно. Таким образом, поскольку конфигурация цилиндра 410D может быть уменьшенного размера, производительность улучшается. Кроме того, за счет амортизаторов 411D, 412D и 413D, служащих в качестве амортизирующих механизмов, уменьшается столкновение между рамой 10C корпуса транспортного средства и передним гусеничным движущим устройством. Таким образом, переднее гусеничное движущее устройство 30C устойчиво контактирует с землей, и улучшается эффективность передвижения или комфорт во время движения. Дополнительно, пятый рычажный элемент 60D данного примера укорочен таким образом, что частично удалена задняя часть, оборудованная гильзой 402D цилиндра.
[0372] Кроме того, подъемное устройство может содержать два цилиндра 420D и 421D, как проиллюстрировано на Фиг. 52. Один конец цилиндра 420D прикреплен с возможностью поворота к кронштейну 65D первого рычажного элемента 56D через амортизатор 422D, служащий в качестве амортизирующего механизма, а другой его конец прикреплен с возможностью поворота к пятому рычажному элементу 60D. Один конец цилиндра 421D прикреплен с возможностью поворота к кронштейну 66D второго рычажного элемента 57D через амортизатор 423D, служащий в качестве амортизирующего механизма, а другой его конец прикреплен с возможностью поворота к пятому рычажному элементу 60D. Два цилиндра 420D и 421D расположены в вертикально симметричных положениях относительно пятого рычажного элемента 60D. Кроме того, два цилиндра 420D и 421D соединены бок-о-бок внутри гидравлического контура, и два цилиндра 420D и 421D все время выполняют одинаковую телескопическую операцию.
[0373] Таким образом, когда цилиндры 420D и 421D движутся телескопическим образом, переднее гусеничное движущее устройство 30C поднимается в вертикальном направлении вдоль вращающегося вала 53D (линия L1D), служащего в качестве вала рулевого управления. С подобной конфигурацией цилиндры 420D и 421D могут быть уменьшенного размера, и улучшается производительность. Дополнительно, поскольку цилиндры 420D и 421D соединены бок-о-бок внутри гидравлического контура, нет необходимости в отдельном управлении цилиндрами, а управляющая конфигурация является простой. Кроме того, за счет амортизаторов 422D и 423D, служащих в качестве амортизирующих механизмов, уменьшается столкновение между рамой 10C корпуса транспортного средства и передним гусеничным движущим устройством. Соответственно, переднее гусеничное движущее устройство 30C устойчиво контактирует с землей, и улучшается эффективность передвижения или комфорт во время движения.
[0374] Кроме того, как проиллюстрировано на Фиг. 53, подъемное устройство может содержать первый двигатель 430D и второй двигатель 431D, служащие в качестве электрических двигателей. Первый двигатель 430D и второй двигатель 431D соединены с аккумулятором и контроллером CC (не проиллюстрировано). Первый двигатель 430D и второй двигатель 431D приводятся в действие за счет электрической энергии аккумулятора и под управлением контроллера CC.
[0375] Первый двигатель 430D прикреплен к листообразному элементу пятого рычажного элемента 60D, расположенному на внутренней стороне транспортного средства поблизости от соединительной части 61D и соединительной части 62D. Ведущий вал 432D первого двигателя 430D выступает в редуктор 433D, предоставленный между двумя листообразными элементами пятого рычажного элемента 60D. По этой причине ведущий вал 432D первого двигателя 430D взаимосвязанным образом соединен с соединительной частью 61D первого рычажного элемента 56D и соединительной частью 62D второго рычажного элемента 57D через множество шестерней (не проиллюстрировано) внутри редуктора 433D.
[0376] По этой причине, когда вращается ведущий вал 432D первого двигателя 430D, первый рычажный элемент 56D поворачивается вокруг соединительной части 61D относительно пятого рычажного элемента 60D, а второй рычажный элемент 57D поворачивается вокруг соединительной части 62D относительно пятого рычажного элемента 60D. В данном случае направления поворота первого рычажного элемента 56D и второго рычажного элемента 57D в ответ на вращение ведущего вала 432D первого двигателя 430D являются противоположными друг другу, а величины их поворота (углы поворота) равны друг другу. То есть, например, на Фиг. 53, когда первый рычажный элемент 56D поворачивается вокруг соединительной части 61D в направлении против часовой стрелки на угол θD, второй рычажный элемент 57D поворачивается вокруг соединительной части 62D в направлении по часовой стрелке на угол θD.
[0377] По аналогии с первым двигателем 430D, второй двигатель 431D прикреплен к листообразному элементу пятого рычажного элемента 60D, расположенному на внутренней стороне транспортного средства поблизости от соединительной части 63D и соединительной части 64D. Ведущий вал 434D второго двигателя 431D выступает в редуктор 435D, предоставленный между двумя листообразными элементами пятого рычажного элемента 60D. По этой причине ведущий вал 434D второго двигателя 431D взаимосвязанным образом соединен с соединительной частью 63D третьего рычажного элемента 58D и соединительной частью 64D четвертого рычажного элемента 59D через множество шестерней (не проиллюстрировано) внутри редуктора 435D.
[0378] По этой причине, когда вращается ведущий вал 434D второго двигателя 431D, третий рычажный элемент 58D поворачивается вокруг соединительной части 63D относительно пятого рычажного элемента 60D, а четвертый рычажный элемент 59D поворачивается вокруг соединительной части 64D относительно пятого рычажного элемента 60D. В данном случае направления поворота третьего рычажного элемента 58D и четвертого рычажного элемента 59D в ответ на вращение ведущего вала 434D второго двигателя 431D являются противоположными друг другу, а величины поворота (углы поворота) равны друг другу. То есть на Фиг. 53, например, когда третий рычажный элемент 58D поворачивается вокруг соединительной части 63D в направлении против часовой стрелки на угол θD, четвертый рычажный элемент 59D поворачивается вокруг соединительной части 64D в направлении по часовой стрелке на угол θD. Дополнительно, между каждым из первого рычажного элемента 56D и второго рычажного элемента 57D и пятого рычажного элемента 60D предоставлены амортизаторы 436D и 437D, которые аналогичны амортизаторам 412D и 413D, проиллюстрированным на Фиг. 51.
[0379] Таким образом, рычажный механизм 52D движется телескопическим образом в вертикальном направлении за счет управления направлениями поворота и величинами поворота первого двигателя 430D и второго двигателя 431D. И переднее гусеничное движущее устройство 30C поднимается в вертикальном направлении вдоль вращающегося вала 53D (линия L1D), служащего в качестве вала рулевого управления. С подобной конфигурацией подъемное устройство является легко управляемым, ответная реакция подъемного устройства является быстрой, и может выполняться требуемая операция подъема. Кроме того, за счет амортизаторов 436D и 437D, служащих в качестве амортизирующих механизмов, уменьшается столкновение между рамой 10C корпуса транспортного средства и передним гусеничным движущим устройством. Соответственно, переднее гусеничное движущее устройство 30C устойчиво контактирует с землей, и улучшается эффективность передвижения или комфорт во время движения.
[0380] Дополнительно, направление подъема переднего гусеничного движущего устройства 30C определяется длиной или расположением рычажных элементов 56D, 57D, 58D, 59D и 60D и конфигурацией первого двигателя 430D и второго двигателя 431D, служащих в качестве подъемного устройства. Каждая конфигурация соответствующим образом выполнена таким образом, чтобы переднее гусеничное движущее устройство 30C могло подниматься в вертикальном направлении вдоль вращающегося вала 53D (линия L1D), служащего в качестве вала рулевого управления.
[0381] Дополнительно, расположение первого двигателя 430D и второго двигателя 431D не ограничено описанной выше конфигурацией. Например, первый и второй двигатели могут быть расположены между листообразным элементом пятого рычажного элемента 60D, расположенным на внутренней стороне транспортного средства, и листообразным элементом пятого рычажного элемента 60D, расположенным снаружи транспортного средства. С подобной конфигурацией первый двигатель 430D и второй двигатель 431D не выступают, пространство может эффективно использоваться, а размер транспортного средства не увеличивается. Кроме того, первый двигатель 430D и второй двигатель 431D могут быть защищены пятым рычажным элементом 60D.
[0382] Кроме того, двигатель, служащий в качестве подъемного устройства, может представлять собой первый двигатель 430D или второй двигатель 431D. В данном случае первый двигатель 430D может поворачивать первый рычажный элемент 56D и второй рычажный элемент 57D в противоположных направлениях относительно пятого рычажного элемента 60D таким образом, чтобы величины поворота (углы поворота) были равны друг другу. Таким образом, переднее гусеничное движущее устройство 30C может подниматься в вертикальном направлении вдоль вращающегося вала 53D (линия L1D), служащего в качестве вала рулевого управления, только посредством первого двигателя 430D. Кроме того, второй двигатель 431D может поворачивать третий рычажный элемент 58D и четвертый рычажный элемент 59D в противоположных направлениях относительно пятого рычажного элемента 60D таким образом, чтобы величины поворота (углы поворота) были равны друг другу. Таким образом, переднее гусеничное движущее устройство 30C может подниматься в вертикальном направлении вдоль вращающегося вала 53D (линия L1D), служащего в качестве вала рулевого управления, только посредством второго двигателя 431D. Таким образом, переднее гусеничное движущее устройство 30C может подниматься посредством первого двигателя 430D или второго двигателя 431D. С подобной конфигурацией управление является простым, поскольку переднее гусеничное движущее устройство 30C может подниматься за счет управления одним двигателем.
[0383] Кроме того, первый двигатель 430D или второй двигатель 431D, служащие в качестве подъемного устройства, могут быть задействованы в качестве генератора таким образом, чтобы сохранять электрическую энергию в аккумуляторе. С подобной конфигурацией энергия подъема переднего гусеничного движущего устройства 30C может регенерироваться в виде электрической энергии, и, таким образом, самоходное транспортное средство 1C может выполнять экономически эффективное движение.
[0384] Кроме того, в качестве примера подобной конфигурации, первый двигатель 430D задействуется в качестве генератора таким образом, чтобы сохранять электрическую энергию в аккумуляторе, а второй двигатель 431D задействуется в качестве электрического двигателя. Когда переднее гусеничное движущее устройство 30C движется вниз, то есть рычажный механизм 52D удлиняется в вертикальном направлении, первый двигатель 430D останавливается, а второй двигатель 431D задействуется в качестве электрического двигателя. Соответственно, рычажный механизм 52D удлиняется за счет движущей мощности второго двигателя 431D. Когда переднее гусеничное движущее устройство 30C движется вверх, то есть рычажный механизм 52D укорачивается в вертикальном направлении, первый двигатель 430D задействуется в качестве генератора, а второй двигатель 431D останавливается, находясь в пассивном состоянии (состояние без крутящего момента) таким образом, что рычажный механизм 52D укорачивается. В данном случае, когда второй двигатель 431D останавливается, усилие поддержки рычажного механизма 52D посредством второго двигателя 431D исчезает, так что рычажный механизм 52D укорачивается за счет массы рамы 10C корпуса транспортного средства или водителя. Когда рычажный механизм 52D укорачивается за счет массы рамы 10C корпуса транспортного средства или водителя, первый двигатель 430D задействуется в качестве генератора таким образом, чтобы регенерировалась энергия.
[0385] Дополнительно, первый двигатель 430D и второй двигатель 431D могут избирательно эксплуатироваться в качестве электрического двигателя или генератора. С подобной конфигурацией переднее гусеничное движущее устройство 30C может двигаться вниз, а энергия может регенерироваться двумя двигателями. Соответственно, переднее гусеничное движущее устройство 30C может быстро передвигаться вниз, при этом улучшается эффективность регенерации энергии. Кроме того, поскольку два двигатели могут избирательно эксплуатироваться в качестве электрического двигателя и генератора в ответ на состояние при передвижении, самоходное транспортное средство 1C может выполнять экономически эффективное движение.
[0386] Дополнительно, приведение в действие первого двигателя 430D и второго двигателя 431D, и выбор электрического двигателя и генератора не имеет особых ограничений. В данном случае управление может выполняться в ответ на состояние при передвижении. Например, по аналогии с управлением цилиндром 400D, управление включением/выключением при приведении в действие первого двигателя 430D и второго двигателя 431D в качестве электрического двигателя, или управление выбором электрического двигателя и генератора может выполняться в ответ на состояние при передвижении.
[0387] В данном случае, поскольку существует потребность в эксплуатации первого двигателя 430D и второго двигателя 431D в качестве электрических двигателей для того, чтобы удерживать переднее гусеничное движущее устройство 30C в предварительно определенном положении подъема, повышается величина потребления электрической энергии. В данном случае, например, только когда переднее гусеничное движущее устройство 30C сильно поднимается, первый двигатель 430D и второй двигатель 431D задействуются в качестве электрических двигателей. В другом случае приведение в действие останавливается, чтобы прийти в пассивное состояние (состояние без крутящего момента). С подобной управляющей конфигурацией, поскольку уменьшается время приведения в действие первого двигателя 430D и второго двигателя 431D, служащих в качестве электрических двигателей, самоходное транспортное средство 1C может выполнять экономически эффективное движение. Дополнительно, рычажный механизм 52D поддерживается за счет амортизаторов 436D и 437D, служащих в качестве амортизирующих механизмов, в состоянии, когда первый двигатель 430D и второй двигатель 431D останавливаются.
[0388] Кроме того, когда прекращается эксплуатация первого двигателя 430D и второго двигателя 431D, служащих в качестве электрических двигателей, первый двигатель 430D и второй двигатель 431D можно задействовать в качестве генераторов. Когда транспортное средство движется по проезжей дороге, имеющей небольшую разницу высоты неровного участка, за счет амортизаторов 436D и 437D уменьшается столкновение, вызываемое неровным участком, но в ответ на неровный участок рычажный механизм 52D движется телескопическим образом. Таким образом, первый двигатель 430D и второй двигатель 431D могут быть задействованы в качестве генераторов таким образом, чтобы регенерировалась энергия. Дополнительно, изобретение не ограничено управлением первого двигателя 430D и второго двигателя 431D посредством контроллера CC. Например, в ответ на действие водителя может выполняться управление включением/выключением для приведения в действие или выбор управления для электрического двигателя или генератора.
[0389] Кроме того, подъемным устройством может быть комбинация описанного выше подъемного устройства. Например, может использоваться комбинация цилиндра 400D, проиллюстрированного на Фиг. 48, и первого двигателя 430D и второго двигателя 431D, проиллюстрированных на Фиг. 53. С подобной конфигурацией переднее гусеничное движущее устройство 30C может подниматься цилиндром 400D, первым двигателем 430D или вторым двигателем 431D, а энергия может регенерироваться посредством первого двигателя 430D или второго двигателя 431D. Таким образом, поскольку работа цилиндра 400D и работа первого двигателя 430D и второго двигателя 431D, служащих в качестве электрических двигателей или генераторов, может использоваться в ответ на подъем переднего гусеничного движущего устройства 30C в комбинации, энергия регенерации эффективность улучшается.
[0390] Кроме того, первый двигатель 430D и второй двигатель 431D не ограничены электрическими двигателями, но могут представлять собой гидравлические двигатели. В случае подобной конфигурации, например, один двигатель выполняется в качестве гидравлического двигателя, служащего в качестве подъемного устройства, поднимающего переднее гусеничное движущее устройство 30C, а другой двигатель выполняется в виде электрического двигателя, служащего в качестве генератора. Соответственно, энергия может регенерироваться.
[0391] Кроме того, амортизирующий механизм не ограничен амортизатором, содержащим пружину, цилиндр и т.п. Может быть предоставлена любая конструкция, способная уменьшить столкновение между рамой 10C корпуса транспортного средства и передним гусеничным движущим устройством 30C. И может использоваться конструкция, содержащая только пружину или цилиндр.
[0392] Кроме того, рычажный механизм может содержать механизм, удерживающий нейтральное положение, который прикладывает усилие к переднему гусеничному движущему устройству 30C в направлении, противоположном направлению подъема. Например, рычажный механизм 152D, проиллюстрированный на Фиг. 54, содержит три пружины 500D, 501D и 502D, служащие в рычажном механизме 52D Фиг. 48 в качестве упругих элементов.
[0393] Передняя часть пятого рычажного элемента 60D снабжена кронштейном 503D, который проходит вверх, и кронштейном 504D, который проходит вниз. Вместо цилиндра 400D предоставлена пружина 500D, которая расположена таким образом, что один конец прикреплен к пятому рычажному элементу 60D, а другой конец прикреплен к опорному элементу 407D. По этой причине пружина 500D расположена в центре пятого рычажного элемента 60D в вертикальном направлении, то есть в центре рычажного механизма 152D в вертикальном направлении. Один конец пружины 501D прикреплен к кронштейну 503D, а другой его конец прикреплен к соединительной части между соединительной штангой 407D и кронштейном 65D. Один конец пружины 502D прикреплен к кронштейну 504D, а другой его конец прикреплен к соединительной части между соединительной штангой 408D и кронштейном 66D. По этой причине две пружины 501D и 502D расположены в вертикально симметричных положениях относительно пятого рычажного элемента 60D.
[0394] Все три пружины 500D, 501D и 502D могут двигаться телескопическим образом в продольном направлении, а посредством пружин 500D, 501D и 502D, соответственно, вставляют телескопические штангообразные элементы 505D, 506D и 507D. штангообразные элементы 505D, 506D и 507D используют в качестве направляющих, когда пружины 500D, 501D и 502D двигаются телескопическим образом, и используют для предотвращения сгибания пружин 500D, 501D и 502D в укороченном состоянии. Дополнительно, все три пружины 500D, 501D и 502D прикреплены в укороченном состоянии, чтобы вызвать удлиняющее усилие (упругое усилие). Дополнительно, подъемное устройство содержит первый двигатель 430D и второй двигатель 431D, расположенные между листообразным элементом пятого рычажного элемента 60D, расположенным на внутренней стороне транспортного средства, и листообразным элементом пятого рычажного элемента 60D, расположенным снаружи транспортного средства.
[0395] В данном случае Фиг. 54 иллюстрирует состояние, когда самоходное транспортное средство 1C стоит на плоской земле, а переднее гусеничное движущее устройство 30C находится в нейтральном положении в вертикальном направлении. По этой причине рычажный механизм 152D содержится с удерживанием в то же время равновесия между упругим усилием пружины 500D, нагрузкой самоходного транспортного средства 1C, прикладываемой к рычажному механизму 152D, и упругими усилиями двух пружин 501D и 502D. Дополнительно, нейтральное положение показывает центр диапазона подъема переднего гусеничного движущего устройства 30C в вертикальном направлении.
[0396] Когда рычажный механизм 152D с подобной конфигурацией удлиняется в вертикальном направлении из состояния Фиг. 54, а переднее гусеничное движущее устройство 30C движется вниз, пружина 500D удлиняется таким образом, что упругого усилие уменьшается, и две пружины 501D и 502D укорачиваются таким образом, что увеличиваются упругие усилия. Таким образом, не сохраняется равновесие усилий пружин 500D, 501D и 502D, прикладываемых к рычажному механизму 152D. Соответственно, усилие укорачивания рычажного механизма 152D в вертикальном направлении, то есть на рычажный механизм 152D действует усилие передвижения переднего гусеничного движущего устройства 30C вверх.
[0397] Кроме того, когда рычажный механизм 152D укорачивается в вертикальном направлении из состояния Фиг. 54 таким образом, что переднее гусеничное движущее устройство 30C движется вверх, пружина 500D укорачивается таким образом, что увеличивается упругое усилие, и две пружины 501D и 502D удлиняются таким образом, что упругие усилия уменьшаются. Таким образом, не сохраняется равновесие усилий пружин 500D, 501D и 502D, прикладываемых к рычажному механизму 152D. Соответственно, усилие удлинения рычажного механизма 152D в вертикальном направлении, то есть на рычажный механизм 152D действует усилие передвижения переднего гусеничного движущего устройства 30C вниз.
[0398] Таким образом, описанный выше механизм, содержащий пружины 500D, 501D и 502D, используется для прикладывания усилия к переднему гусеничному движущему устройству 30C в направлении, противоположном направлению подъема, и данное усилие используется для возврата переднего гусеничного движущего устройства 30C в нейтральное положение. То есть описанный выше механизм представляет собой механизм, удерживающий нейтральное положение, которое удерживает переднее гусеничное движущее устройство 30C в нейтральном положении в вертикальном направлении. По этой причине, поскольку предоставлен подобный механизм, удерживающий нейтральное положение, можно предотвращать проблему, при которой переднее гусеничное движущее устройство 30C излишне следует за неровным участком неровной земли, когда транспортное средство движется по неровной земле с неровным участком, и улучшать эффективность передвижения. Кроме того, когда первый двигатель 430D и второй двигатель 431D задействуются в качестве генераторов в ответ на повышение переднего гусеничного движущего устройства 30C, то есть телескопическое движение рычажного механизма 152D, может эффективно регенерироваться энергия.
[0399] Дополнительно, механизм, удерживающий нейтральное положение, не ограничен описанной выше конфигурацией и может представлять собой механизм, который прикладывает усилие в направлении, противоположном направлению подъема, в ответ на повышение переднего гусеничного движущего устройства 30C. Например, может использоваться комбинация амортизатора, служащего в качестве амортизирующего механизма.
[0400] Кроме того, две пружины 501D и 502D могут быть образованы в виде одной новой пружины. Таким образом, могут быть получены две пружины. В данном случае новая пружина расположена соосно с пружиной 500d и продольно симметрично с пружиной 500D относительно опорного элемента 406D. В данном случае один конец прикреплен к опорному элементу 406D, а другой конец прикреплен к пятому рычажному элементу 60D. С подобной конфигурацией улучшается производительность или технологичность технического обслуживания, поскольку механизм, удерживающий нейтральное положение, становится простым. Дополнительно, в случае конфигурации, содержащей три пружины 500D, 501D и 502D, отдельно может регулироваться усилие пружины 501D, прикладываемое к первому рычажному элементу 56D, и усилие пружины 502D, прикладываемое ко второму рычажному элементу 57D. И может легко регулироваться установка для телескопической операции рычажного механизма 152D в вертикальном направлении.
[0401] Кроме того, вместо рычажного механизма 52D, проиллюстрированного на Фиг. 48, соединительный механизм может содержать телескопический цилиндр. На боковом изображении цилиндр расположен вдоль линии L1D. В данном случае один конец прикреплен к раме 51D тележки, а другой конец прикреплен к соединительной раме 36C переднего гусеничного движущего устройства 30C с возможностью поворота относительно горизонтального направления, служащего в качестве оси. С подобной конфигурацией, поскольку соединение между передним гусеничным движущим устройством 30C и рамой 51D тележки, и подъем переднего гусеничного движущего устройства 30C могут выполняться с помощью одного механизма цилиндра, улучшается производительность или технологичность технического обслуживания. Дополнительно, один конец цилиндра может быть снабжен амортизатором, служащим в качестве амортизирующего механизма, а цилиндр может быть прикреплен к переднему гусеничному движущему устройству 30C через амортизатор.
[0402] Кроме того, по аналогии с подъемным устройством переднего гусеничного движущего устройства 30C, заднее гусеничное движущее устройство 70C также может содержать устройство колебания, которое предоставляет возможность колебания в вертикальном направлении. Например, в качестве устройства колебания предоставлен цилиндр для вынужденного поворота качающегося рычага 93C заднего устройства 90C подвески, проиллюстрированного на Фиг. 40 и 41, относительно рамы 10C корпуса транспортного средства. В данном случае, поскольку правое и левое задние гусеничные движущие устройства 70CR и 70CL соединены друг с другом через качающийся рычаг 93C, правое и левое задние гусеничные движущие устройства 70CR и 70CL могут колебаться в вертикальном направлении за счет поворота качающегося рычага 93C.
[0403] цилиндр, служащий в качестве устройства колебания, расположен с продолжением по существу в вертикальном направлении таким образом, что один конец прикреплен к качающемуся рычагу 93C с возможностью поворота относительно продольного направления, служащего в качестве оси. Кроме того, другой конец цилиндра прикреплен к раме 10C корпуса транспортного средства с возможностью поворота относительно продольного направления, служащего в качестве оси. По этой причине, когда цилиндр движется телескопическим образом, качающийся рычаг 93C поворачивается относительно рамы 10C корпуса транспортного средства.
[0404] Таким образом, поскольку предоставлено устройство колебания, которое поворачивает заднее гусеничное движущее устройство 70C в вертикальном направлении, правое и левое задние гусеничные движущие устройства 70CR и 70CL могут колебаться в вертикальном направлении, чтобы следовать неровному участку земли или наклону склона. Эффективность передвижения для неровной земли дополнительно улучшается.
[0405] Кроме того, как проиллюстрировано на Фиг. 55, самоходным транспортным средством согласно варианту осуществления может быть самоходное транспортное средство 2C, в котором заднее гусеничное движущее устройство 70C и заднее устройство 90C подвески самоходного транспортного средства 1C имеют такие же конфигурации, как конфигурации переднего гусеничного движущего устройства 30C и переднего устройства 50C подвески. С подобной конфигурацией уменьшается количество составных элементов, и, таким образом, улучшается производительность. Кроме того, самоходное транспортное средство 2C может выполнять различные операции передвижения. Например, транспортное средство может выполнять операцию поворота с меньшим радиусом или операцию передвижения в боковом направлении без изменения направления рамы 210C корпуса транспортного средства.
[0406] В данном случае заднее устройство подвески самоходного транспортного средства 2C расположено таким образом, что рычажный механизм 52C изогнут в направлении, противоположном переднему устройству 50C подвески. То есть рычажный механизм 52C изогнут в направлении задней стороны рамы 210C корпуса транспортного средства на внешней стороне рамы 51C тележки. Таким образом, все рычажные механизмы 52C и 52C переднего и заднего устройств подвески согнуты наружу от самоходного транспортного средства 2C. В данном случае, поскольку нет необходимости обеспечивать пространство для изгиба рычажных механизмов 52C и 52C на внутренней стороне транспортного средства, полная длина самоходного транспортного средства 2C может быть укорочена. Дополнительно, переднее и заднее устройства подвески самоходного транспортного средства 2C может представлять собой переднее устройство 50D подвески с подъемным устройством.
[0407] Кроме того, самоходное транспортное средство согласно варианту осуществления не ограничено конфигурацией, содержащей четыре переднее, заднее, правое и левое гусеничные движущие устройства 30CR, 30CL, 70CR и 70CL по аналогии с самоходными транспортными средствами 1C и 2C. транспортное средство может двигаться за счет использования по меньшей мере пары из правого и левого движущих устройств. Например, как проиллюстрировано на Фиг. 56, может использоваться самоходное транспортное средство 3C, в котором предоставлено только одно из задних гусеничных движущих устройств 70CR и 70CL самоходного транспортного средства 1C. Самоходное транспортное средство 3C имеет конфигурацию, в которой одно заднее гусеничное движущее устройство 70C расположено в центре рамы 10C корпуса транспортного средства в горизонтальном направлении самоходного транспортного средства 1C. Заднее гусеничное движущее устройство 70C самоходного транспортного средства 3C находится между парой правого и левого толкающих рычагов 391C и 391C, продолжающихся в продольном направлении и подвешенных на раме 310C корпуса транспортного средства с помощью толкающих рычагов 391C и 391C. Правый и левый толкающие рычаги 391C и 391C расположены таким образом, что одни концы соединены с рамой 310C корпуса транспортного средства с возможностью поворота относительно горизонтального направления, служащего в качестве оси (вращающийся вал 324C), а другие концы соединены с задним гусеничным движущим устройством 70C с возможностью поворота относительно горизонтального направления, служащего в качестве оси (вращающийся вал 380C). Таким образом, правый и левый толкающие рычаги 391C и 391C подвешивают заднее гусеничное движущее устройство 70C на раме 310C корпуса транспортного средства с возможностью колебания в вертикальном направлении.
[0408] Дополнительно, между правым и левым толкающими рычагами 391C и 391C и рамой 310C корпуса транспортного средства присоединены амортизаторы 394C и 394C, которые аналогичны амортизатору 94C. То есть самоходное транспортное средство 3C выполнено с возможностью передвижения тремя гусеничными движущими устройствами, образованными таким образом, что передние части снабжены парой правого и левого передних гусеничных движущих устройств 30C, а задние части снабжены одним задним гусеничным движущим устройством 70C.
[0409] С подобной конфигурацией транспортное средство может устойчиво двигаться по склону или по неровной земле даже на трех движущих устройствах. Кроме того, поскольку может быть уменьшено количество составных элементов, улучшаются производительность и технологичность технического обслуживания.
[0410] Кроме того, движущие устройства самоходных транспортных средств 1A, 1B, 1C, 2C и 3C согласно варианту осуществления не ограничены движущим устройством гусеничного типа, но могут представлять собой движущее устройство колесного типа. С подобной конфигурацией, поскольку движущее устройство имеет простую конфигурацию, может быть уменьшено количество составных элементов, и улучшаются производительность и технологичность технического обслуживания. Дополнительно, когда транспортное средство движется по мягкой земле или т.п., желательным является движущее устройство гусеничного типа, имеющее высокую эффективность сцепления с землей.
[0411] Кроме того, самоходные транспортные средства 1A, 1B, 1C, 2C и 3C согласно варианту осуществления не ограничены самоходным транспортным средством седлового типа, но могут представлять собой самоходное транспортное средство, которое имеет кабину, так чтобы водитель сидел в ней на сиденье. На передней стороне сиденья предоставлена рукоять, имеющая круглый рукояточный руль на верхнем конце вала рулевого управления. Под рукоятью предоставлена педаль акселератора, приводимая в действие ногой. С подобной конфигурацией с помощью кабины обеспечивается безопасность водителя.
[0412] Вместо рулевого управления и педали акселератора, могут быть предоставлены пара из правого и левого рычагов управления, одни концы которых поддерживаются с возможностью вращения рамой корпуса транспортного средства для наклона в продольном направлении. Рычаг управления расположен с каждой из правой и левой сторон водителя, сидящего на транспортном средстве. Правой рукой водитель приводит в действие правый рычаг управления, а левой рукой приводит в действие левый рычаг управления.
[0413] Например, в самоходном транспортном средстве 1A управление приведением в действие правых переднего и заднего гусеничных движущих устройств 30AR и 70AR происходит на основании наклона (угла поворота) правого рычага управления в продольном направлении, а управление приведением в действие левых переднего и заднего гусеничных движущих устройств 30AL и 70AL происходит на основании наклона (угла поворота) левого рычага управления в продольном направлении. С подобной конфигурацией, поскольку водитель может выполнять операцию передвижения рабочего транспортного средства только посредством операций наклона правого и левого рычага управления, операция передвижения может легко выполняться.
[0414] Дополнительно, когда операция передвижения выполняется посредством правого и левого рычагов управления, водитель не может легко удерживать положение за счет захвата рычага управления. Таким образом, необходимо использовать самоходное транспортное средство, в котором водитель сидит на сиденье.
[0415] Кроме того, самоходные транспортные средства 1A, 1B, 1C, 2C и 3C согласно варианту осуществления не ограничены самоходным транспортным средством, на котором сидит водитель, как описано выше. То есть может использоваться автоматическое самоходное транспортное средство, которое может приводиться в действие из удаленного места. Например, может быть использована конфигурация, в которой предоставлено устройство связи, соединенное с контроллером CA самоходного транспортного средства 1A, а самоходное транспортное средство 1A приводится в действие с помощью внешнего рабочего устройства из удаленного места. В данном случае устройство связи используют для беспроводной передачи и получения информации. Соответственно, самоходное транспортное средство может передавать и получать информацию внешнему рабочему устройству и от него. С подобной конфигурацией, поскольку работающий может приводить в действие самоходное транспортное средство 1A из удаленного места, повышается рабочая эффективность, и может обеспечиваться безопасность работающего.
[0416] Дополнительно, в случае подобной удаленной операции самоходное транспортное средство 1A может дополнительно содержать устройство захвата изображений, способное захватывать по меньшей мере изображение в направлении движения таким образом, чтобы захваченное изображение могло проверяться внешним рабочим устройством. С подобной конфигурацией работающий может приводить в действие самоходное транспортное средство 1A из удаленного места посредством проверки состояния передвижения самоходного транспортного средства 1A даже в месте, где самоходное транспортное средство не может быть видно.
[0417] Кроме того, изобретение не ограничено описанными выше примерами и может включать все модификации в пределах объема правовых притязаний изобретения.
Промышленная применимость
[0418] Самоходное транспортное средство согласно изобретению не имеет особых ограничений. Изобретение может быть применено ко всем самоходным транспортным средствам, например, к рабочему транспортному средству, такому как трактор, комбайн, рассадопосадочная машина, строительная машина и лесотехническая машина, используемая на неровной земле, транспортировочное транспортное средство, такое как грузоподъемник, и легковой автомобиль.
Перечень ссылочных обозначений
[0419] 1A, 1B, 1C, 2C, 3C - самоходное транспортное средство
10A, 10B, 10C, 210C, 310C - рама корпуса транспортного средства
30A, 30C - переднее гусеничное движущее устройство (движущее устройство)
50A, 50B, 50C, 50D - переднее устройство подвески
51A, 51B - вращающийся рычаг
51C, 51D - рама тележки
52C, 52D - рычажный механизм (соединительный механизм)
53A, 53B - соединительный рычаг
54A, 54B - качающийся рычаг
70A, 70C - заднее гусеничное движущее устройство (движущее устройство)
90A, 90B, 90C - заднее устройство подвески
91A, 91B - вращающийся рычаг
93A, 93B - соединительный рычаг
94A, 94B - качающийся рычаг
200B, 220B - корпус двигателя (качающаяся опорная часть)
210B, 230B - амортизатор (амортизирующий механизм)
400D, 410D, 420D, 421D - цилиндр (подъемное устройство)
430D - первый двигатель (подъемное устройство)
431D - второй двигатель (подъемное устройство)
| название | год | авторы | номер документа |
|---|---|---|---|
| СНЕГОХОД | 2009 |
|
RU2517918C2 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| СИСТЕМА ДЛЯ ВЫЕМКИ ГРУНТА ИЗ-ПОД ЗАГЛУБЛЕННОЙ ТРУБЫ | 2003 |
|
RU2327839C2 |
| КОНСТРУКЦИЯ ДЛЯ ПРЕДОТВРАЩЕНИЯ ВЫПАДЕНИЯ ДЛЯ КРЕПЕЖНОГО СРЕДСТВА ЗАЩИТНОГО ЭЛЕМЕНТА В РЕЖУЩЕМ СТАНКЕ | 2010 |
|
RU2557033C2 |
| СНЕГОХОД-ТРАНСФОРМЕР | 2010 |
|
RU2442716C1 |
| ПОДВЕСКА СНЕГОХОДА | 2014 |
|
RU2672346C2 |
| СИСТЕМА УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2018 |
|
RU2689909C1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2554900C2 |





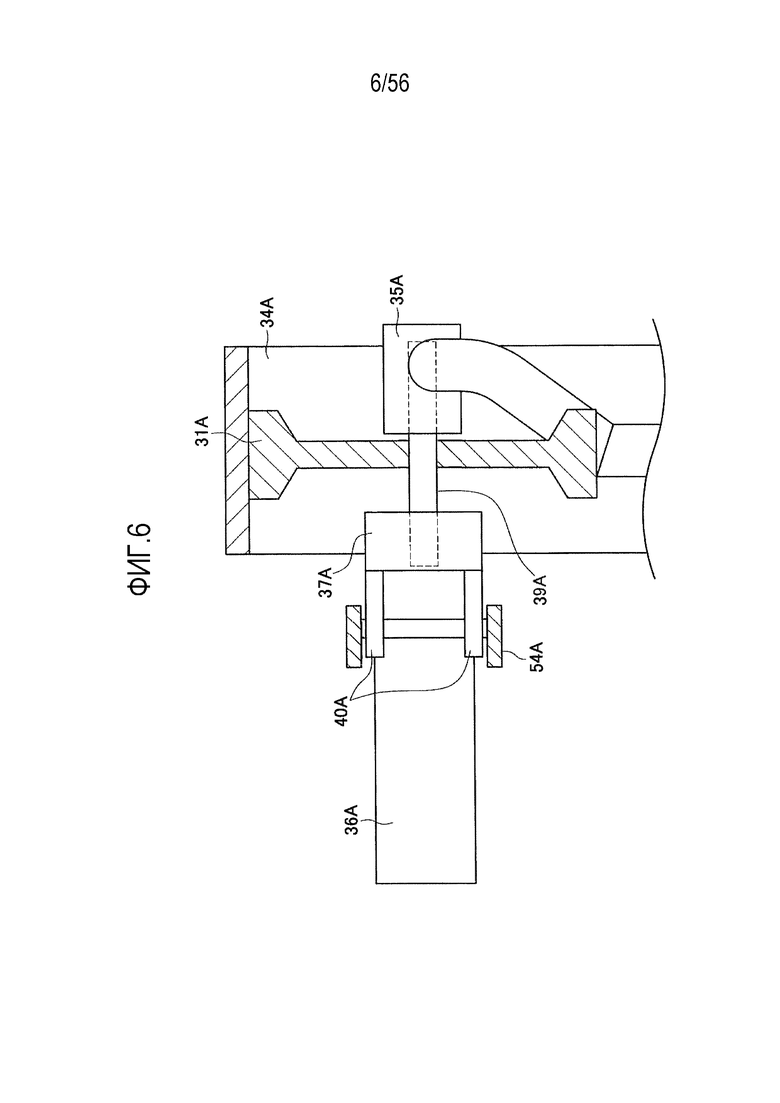


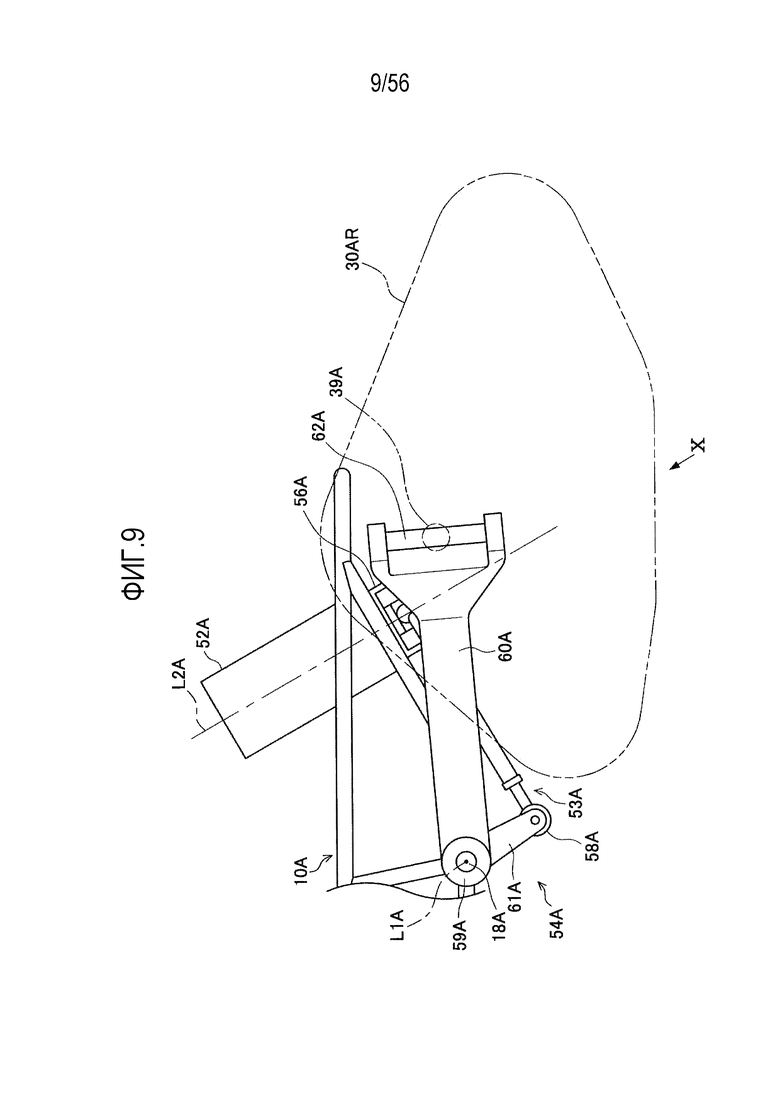




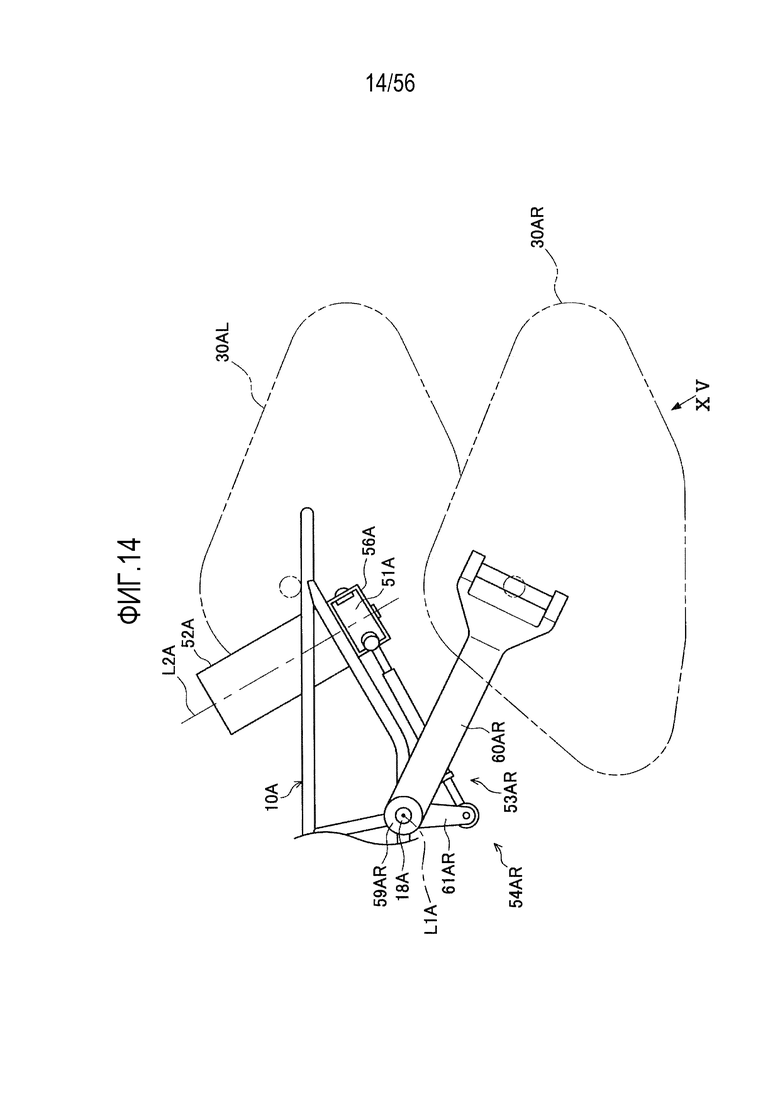












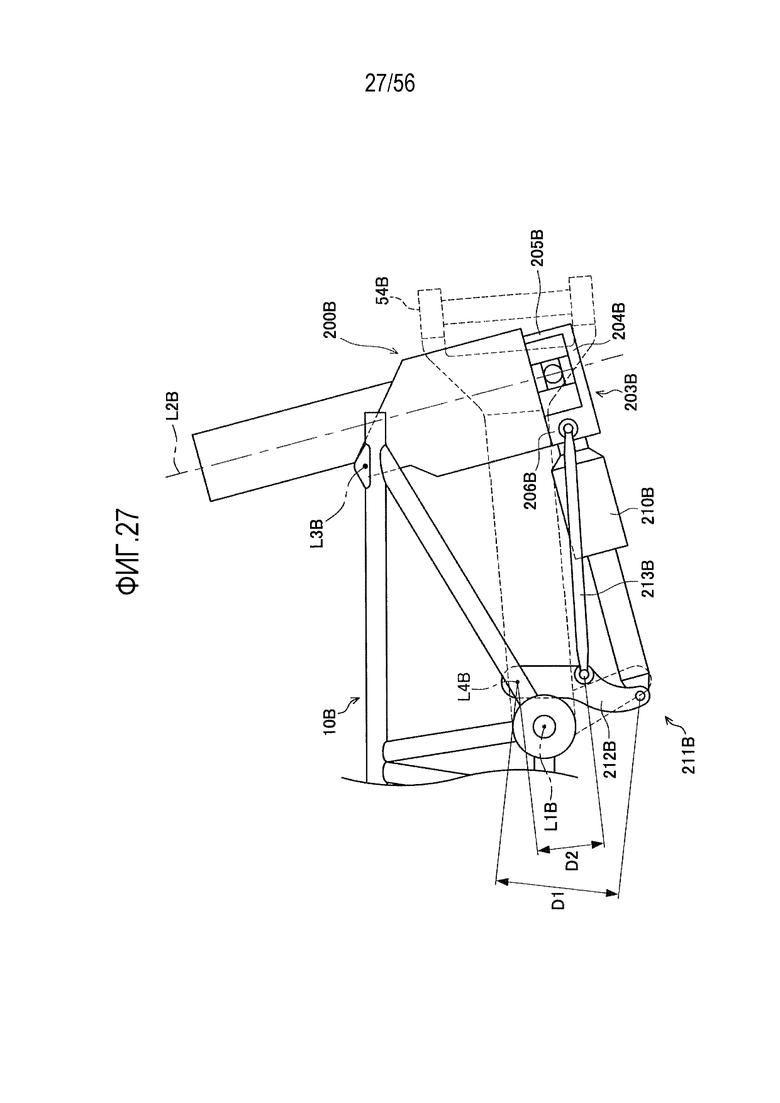


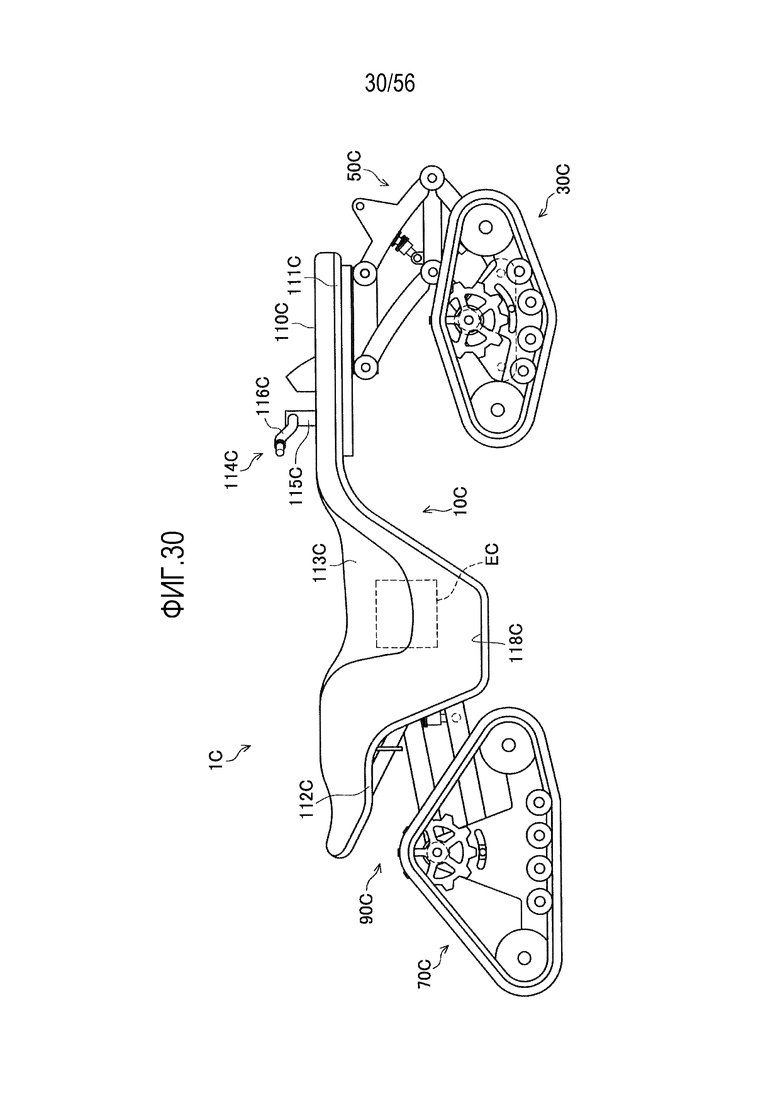


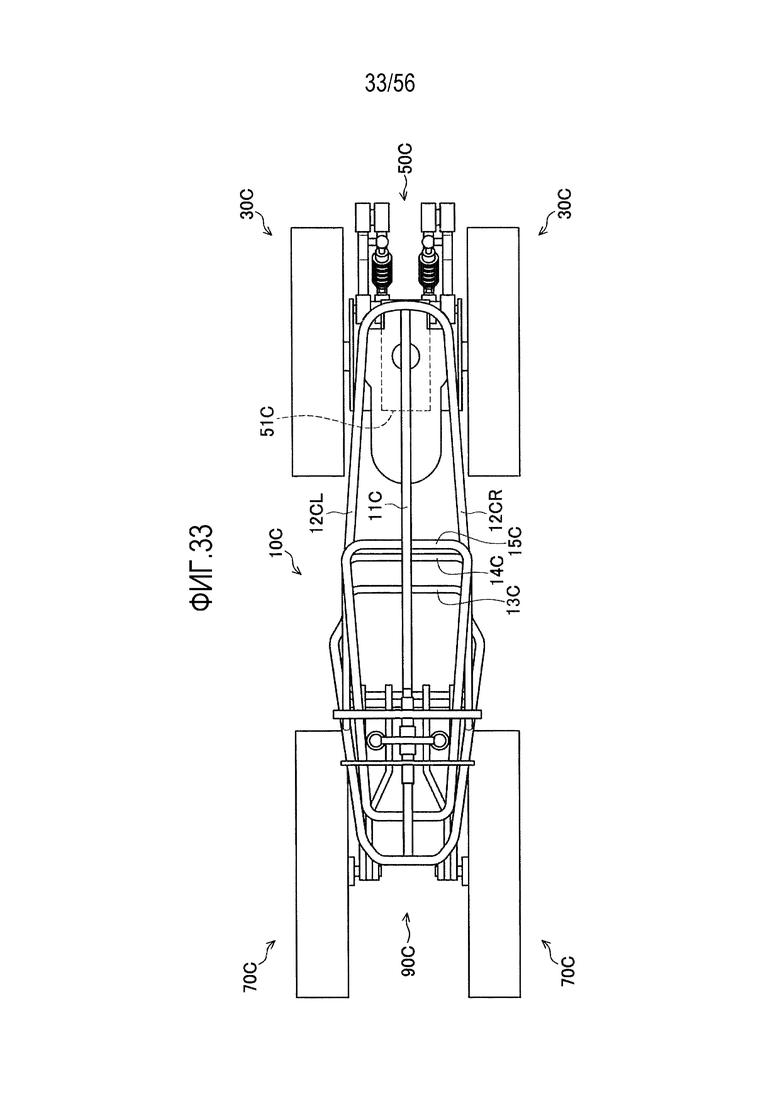





















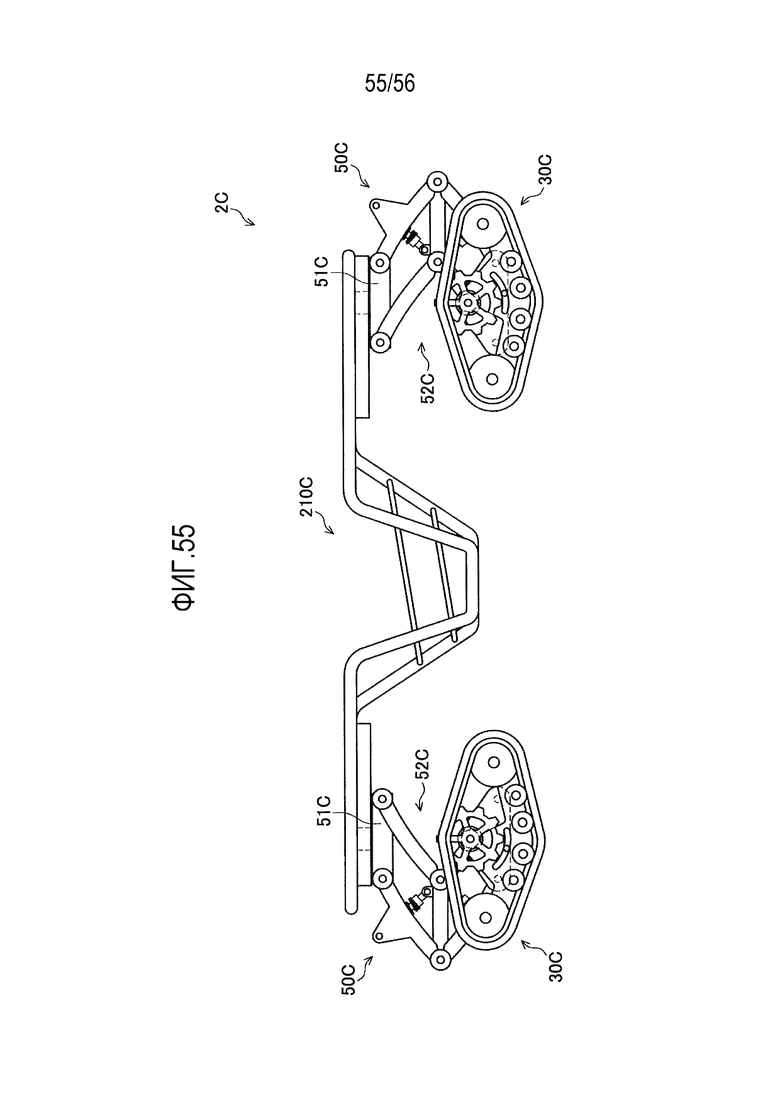

Изобретение относится к самоходному транспортному средству. Транспортное средство содержит раму корпуса транспортного средства, пару из правого и левого передних и задних гусеничных движущих устройств, переднее устройство подвески, которое подвешивает пару из правого и левого передних гусеничных движущих устройств на раме корпуса транспортного средства, и заднее устройство подвески, которое подвешивает пару из правого и левого задних гусеничных движущих устройств на раме корпуса транспортного средства. Переднее устройство подвески в виде единого целого подвешивает пару из правого и левого передних гусеничных движущих устройств на раме корпуса транспортного средства и предоставляет возможность колебания пары из правого и левого передних гусеничных движущих устройств в вертикальном направлении относительно рамы корпуса транспортного средства. Достигается повышение стабильности и плавности передвижения. 56 ил.
Самоходное транспортное средство, содержащее раму корпуса транспортного средства; пару из правого и левого передних гусеничных движущих устройств; пару из правого и левого задних гусеничных движущих устройств; переднее устройство подвески, которое подвешивает пару из правого и левого передних гусеничных движущих устройств на раме корпуса транспортного средства; и заднее устройство подвески, которое подвешивает пару из правого и левого задних гусеничных движущих устройств на раме корпуса транспортного средства, при этом переднее устройство подвески в виде единого целого подвешивает пару из правого и левого передних гусеничных движущих устройств на раме корпуса транспортного средства и обеспечивает возможность колебания или подъема пары из правого и левого передних гусеничных движущих устройств в вертикальном направлении относительно рамы корпуса транспортного средства; причем переднее устройство подвески содержит качающуюся опорную часть, которая поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, вращающийся рычаг, который проходит в горизонтальном направлении и поддерживается качающейся опорной частью с возможностью поворота в центре вращающегося рычага в горизонтальном направлении, правый качающийся рычаг, который поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и имеет конец, соединенный с правым передним гусеничным движущим устройством, левый качающийся рычаг, который поддерживается рамой корпуса транспортного средства с возможностью колебания в вертикальном направлении относительно горизонтального направления, служащего в качестве оси, и имеет конец, соединенный с левым передним гусеничным движущим устройством, правый соединительный рычаг, один конец которого соединен с правым концом вращающегося рычага, а другой конец соединен с правым качающимся рычагом, и левый соединительный рычаг, один конец которого соединен с левым концом вращающегося рычага, а другой конец соединен с левым качающимся рычагом, при этом самоходное транспортное средство дополнительно содержит амортизирующий механизм, расположенный между рамой корпуса транспортного средства и качающейся опорной частью.
| Способ запирания двухоперационного тиристора | 1976 |
|
SU577618A1 |
| Машина для мойки корнеклубнеплодов | 1975 |
|
SU585834A1 |
| US 2954833 A1, 04.10.1960 | |||
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2006 |
|
RU2305045C1 |

