Изобретение относится к специальным самоходным транспортным средствам высокой проходимости и может быть использовано в боевых сухопутных роботах. Известны самоходные транспортные средства высокой проходимости по патентам SU 0640897 А, 05.01.1979; US 3747717 А, 24.07.1973; US 3842926 A, 22.10.1974; US 3057319 A, 09.10.1962; JP 60148780 A, 06.08.1985.
Известно колесное транспортное средство высокой проходимости, содержащее раму, пару колес с бортовыми редукторами, рычаги для балансирной подвески каждого колеса, дифференциальный механизм и двигатель, установленные на раме, ведомые звенья дифференциального механизма соединены с бортовыми редукторами колес, а ведущее звено соединено с двигателем перемещения колес в режиме качения /авт. свид. СССР №149042, 1967, B62D 57/028/.
Данное транспортное средство высокой проходимости не может осуществлять движение в режиме шагающего хода, а лишь обеспечивает автоматическое соблюдение симметрии нагрузки на колеса при отклонениях бортовых редукторов от среднего положения.
Известно также транспортное средство высокой проходимости, имеющее колесно-шагающий движитель, содержащее раму, первую пару колес, вторую пару колес, оси с рычагами для балансирной подвески каждого колеса, установленные на раме, двигатели для перемещения колес в ведущем режиме качения, привод для перемещения колес в режиме шагающего движения /авт. свид. СССР №640897,1979, B62D 57/028/.
Известное транспортное средство высокой проходимости имеет независимую балансирную подвеску для каждого колеса, а следовательно, ограниченный уровень проходимости при преодолении рвов и трещин большой ширины на поверхности грунта.
Известны патенты изобретателя Шмакова Юрия Михайловича на колесно-шагающие транспортные средства по патентам РФ №2355597, 2331542, 2352491, 2443590.
Например, в патенте №2352491 «КОЛЕСНО-ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО» описано четырехопорное шасси, в котором каждая опора состоит из двухтандемно расположенных колес на балансирах. Ступицы колес жестко связаны упругим поворотным рычагом. Ступицы внешних тандемных колес снабжены разнесенным шарниром и шкворнем со стержнем, подвижно в окружном направлении связанным с прилегающим балансиром. Ступицы внутренних тандемных колес выполнены с осью, подвижно в окружном направлении связанной с прилегающим балансиром. Штоки поперечно расположенных гидроцилиндров выполнены свободными в окружном направлении и жестко связаны с основаниями внутренних балансиров. Тандемные балансиры расположены параллельно, кинематически связаны и образуют совместно с колесами и поворотным рычагом шарнирный параллелограмм. Ступицы тандемных колес противоположных бортов совместно с примыкающими с двух сторон деталями образуют силовое кольцо. Технической результат заключается в улучшении маневренности, управляемости и устойчивости шагающего транспортного средства.
Известна также торсионная подвеска, например описанная в патентах RU 2102252 С1, 30.01.1998; DE 1216711 А, 12.05.1986; DE 1289437 A, 13.08.1969; 2102252, B60G 11/18, 1997. Например, в подвеске по патенту РФ №2200676 «Торсионная подвеска колес транспортного средства снабжена торсионными валами, каждый из которых выполнен составным трубчато-стержневым, жестко закрепленным посредством многогранной головки наружной трубы к кронштейну. В свою очередь, на свободную головку сердечника жестко посажены поперечный рычаг и крестовина, которая установлена с возможностью взаимодействия с шипами, выполненными на торцевой поверхности наружной трубы, имеющей большую жесткость, чем промежуточная труба и сердечник, обладающие одинаковой жесткостью. Техническим результатом является повышение надежности и плавности хода транспортного средства».
Известны прыгающие транспортные средства, например, Sand Flea Jumping Robot, американской компании Boston Dynamics. Робот содержит обычное четырехколесное шасси и отдельный прыжковый движитель, установленный в нижней части рамы робота. Колесное шасси состоит из 4-х колес и управляется оператором по радиоканалу.
Прыжковый движитель содержит два прыжковых рычага, средства взвода и пружинный двигатель. Перед прыжком робот обязательно останавливается, прыжковые рычаги выдвигаются из днища и упираются в грунт, придавая корпусу робота нужный угол возвышения перед прыжком, аналогично прыжку обычного кузнечика. Пружинный двигатель взводится, а затем производит резкий поворот прыжковых рычагов, при котором робот совершает прыжок. Робот способен прыгать на высоту до 10 метров (30 футов) при наличии твердого основания - скала, бетон, асфальт. При этом электронная система стабилизации будет сохранять ориентацию, благодаря чему оператор, через видеоканал, сможет хорошо контролировать приземление (http://www.stepandstep.ru/catalog/your-videos/150009/prygayuschiy-robot.html).
Недостатками прыжковой системы данного робота является невозможность осуществления прыжка в движении, требования одинаково высокой жесткости поверхности для опоры прыжковых рычагов, а также практическое отсутствие средств стабилизации положения корпуса робота в полете после прыжка и до приземления.
Известны также прыгающие транспортные средства по патентам RU 93042139 А, 20.08.1996; US 3853195 А, 10.12.1974; US 3855979 A, 24.12.1974; US 3715000 A, 06.02.1973. Например, ПРЫГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО по патенту РФ 2249527 включает корпус с основанием, прыжковый двигатель, кабину для экипажа со шлюзовой камерой, солнечные панели и подпружиненные колеса. Прыжковый двигатель состоит из наводящего устройства и направляющей трубы, внутри которой помещены толкатель, выполненный из материала с эффектом памяти формы, и индукционный нагреватель. Два колеса выполнены заодно с индивидуальным электроприводом (мотор-колеса) и соединены с основанием при помощи ног, состоящих каждая из двух штанг, шарнирно соединенных с основанием и между собой. При этом на штангах установлены пружинные амортизаторы и ограничители, не допускающие увеличение угла между штангами более 45°. Другие два колеса установлены с возможностью поворота в сторону движения транспортного средства. Кроме того, дополнительно имеются горизонтальные стабилизаторы с рулями высоты, закрепленные на боковых поверхностях корпуса, и в хвостовой части - киль с рулем поворота. В результате упрощается управление транспортным средством, повышаются его устойчивость, амортизирующие свойства и экономичность.
Недостатком данного решения является слабая эффективность прыжковых двигателей на основе толкателей, выполненных из материала с эффектом памяти формы и индукционного нагревателя. Вызывают сомнения применение аэродинамических рулей в качестве средств стабилизации полета, так как рули малоэффективны в короткий период времени прыжка.
Наиболее близко к заявляемому изобретению изобретение по патенту Козлова О.Е. РФ №2176607 «ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ». Это изобретение принято за прототип. Согласно патенту транспортное средство включает раму, первую и вторую пары колес, продольные рычаги балансирной подвески каждой пары колес с валами, которые установлены на раме, двигатели для перемещения каждого из упомянутых колес в ведущем режиме качения и привод для перемещения колес в режиме шагающего движения. Средство снабжено симметричным дифференциальным зубчатым механизмом, который имеет ведущее звено и два ведомых звена, ведущее звено выполнено в виде корпуса и кинематической связью соединено с приводом для перемещения одной из упомянутых пар колес в режиме шагающего движения. Ведомые звенья выполнены в виде конических колес с общей геометрической осью и соответственно соединены с валами упомянутых рычагов одной пары колес. Дифференциальный механизм снабжен средством блокировки одного из ведомых звеньев относительно ведущего звена.
Недостатком прототипа является отсутствие возможности совершения прыжковых движений при преодолении препятствий и невозможность самопереворачивания рамы при опрокидывании.
Техническим результатом заявляемого изобретения является повышение маневренности, проходимости и живучести транспортного средства за счет возможности совершения прыжковых движений при преодолении препятствий, возможности совершения лазательных движений при преодолении эскарпов, контрэскарпов и траншей, а также возможности самопереворачивания рамы при опрокидывании.
Найденные решения дают возможность осуществлять наведение неподвижно закрепленного на раме вооружения в широком диапазоне углов вертикальной наводки и круговое горизонтальное наведение, что позволяет отказаться от использования башен и иных средств наведения оружия, снижает массогабаритные и стоимостные характеристики роботов, повышает их живучесть и надежность.
Заявляемый технический результат достигается следующим путем:
1. Длина и положение рычагов подвески в корпусе, а также внешний диаметр колес удовлетворяют ряду определенных соотношений.
2. В конструкции подвески используется высокоэнергоемкие полимерные торсионные втулки, сделанные, например, из полиуретана, углепластика или кевлара, а также управляемые электронной системой управления движением приводы поворота продольных рычагов подвески и средства блокировки валов рычагов подвески.
3. Электронная система управления движением содержит набор программ управления, обеспечивающих автоматическое выполнение совершения прыжковых, лазательных и шаговых движений.
Новым в изобретении является следующее.
1. Длина и положение рычагов подвески в корпусе, а также внешний диаметр колес обеспечивают выполнение следующих условий:
- в положении рычагов подвески, так, чтобы колеса находились над крышей транспортного средства, окружности колес превышают уровень крыши транспортного средства, образуя клиренс, обеспечивающий движение или стабилизацию корпуса в таком положении;
- в положении рычагов подвески в плоскости, проходящей через оси продольных рычагов подвески, так чтобы рычаги подвески при этом были повернуты в одном направлении, между окружностями колес имеется зазор, позволяющий колесам свободно вращаться;
- центр тяжести транспортного средства находится между осями валов задних рычагов подвески и осями задних колес или между осями валов передних рычагов подвески и осями передних колес.
Соблюдение данных условий обеспечивает транспортному средству:
- свойство самопереворачиваемости, т.е. возвращения в исходное положение при случайном переворачивании транспортного средства только за счет манипуляции рычагами подвески с колесами;
- свойство движения в перевернутом положении;
- свойство опускания на днище;
- свойство подъема корпуса на высоту рычагов подвески;
- свойство лазания при преодолении препятствий.
2. Вал рычага подвески соединен с приводом поворота продольных рычагов подвески через полимерную торсионную втулку, сделанную, например, из полиуретана, углепластика или кевлара, причем вал рычага подвески проходит через осевой канал в полимерной торсионной втулке, при этом привод поворота продольных рычагов подвески управляется электронной системой управления движением.
3. На вал рычага подвески одет соединительный диск и/или зубчатое колесо, соединенный с валом рычага подвески, например, с помощью шлицевого соединения. К соединительному диску крепится средство блокировки вала рычага подвески и один торец полимерной торсионной втулки, которая вторым своим торцом соединяется с червячным колесом привода поворота продольного рычага подвески, при этом средство блокировки вала рычага подвески управляется электронной системой управления движением.
Отличия 2 и 3 придают транспортному средству способность к совершению прыжковых движений и амортизации толчков при движении по неровным поверхностям.
4. Каждое колесо имеет отдельный электропривод.
5. Через вал рычага подвески проходит передаточный вал, соединенный одной стороной зубчатой или цепной передачей с двигателем транспортного средства, а другой стороной зубчатой или цепной передачей с колесом. Отличия 4 и 5 известны, но в составе пункта 3 обладают новизной.
6. Процессор управления движением содержит программу управления при колесном движении путем управления поворотом продольных рычагов подвески.
7. Процессор управления движением содержит программу управления при шагании путем управления поворотом продольных рычагов подвески.
8. Процессор управления движением содержит программу изменения высоты корпуса в движении и на месте путем управления поворотом продольных рычагов подвески.
9. Процессор управления движением содержит программу изменения угла наклона корпуса по вертикали путем управления поворотом продольных рычагов подвески на разные углы, при этом поворот корпуса по горизонтали на нужный угол осуществляется вращением колес левого и правого борта с разной скоростью.
10. Процессор управления движением содержит программу совершения прыжка на месте
Отличия 6-10 известны и используются в роботах различных конструкций, но в сочетании с пунктом 1 нигде не описаны и обладают новизной.
11. Процессор управления движением содержит программу совершения прыжка в движении, при этом стабилизация рамы в прыжке осуществляется путем управления поворотом продольных рычагов подвески с помощью электроприводов на основе данных отдатчиков угловых и линейных ускорений.
12. Процессор управления движением содержит программы преодоления стандартных препятствий - эскарпа, контрэскарпа и траншеи - путем управления поворотом продольных рычагов подвески.
13. Процессор управления движением содержит программу самопереворачивания путем управления поворотом продольных рычагов подвески.
Отличия 11-13 неизвестны и в роботах различных конструкций не использовались, в сочетании с пунктом 1 обладают новизной.
На прилагаемых чертежах изображено транспортное средство высокой проходимости (в дальнейшем ТС или транспортное средство).
На фигурах 1-13 цифрами обозначены:
1 - рама или корпус;
2 - двигатель или привод вращения колес;
3 - продольный рычаг подвески;
4 - колесо;
5 - вал;
6 - привод поворота;
7 - средство блокировки;
8 - электропривод;
9 - электронная система управления движением;
10 - процессор;
11 - датчик угловых и линейных ускорений;
12 - полимерная торсионная втулка;
13 - соединительный диск или зубчатое колесо;
14 - осевой канал;
15 - передаточный вал;
16 - зубчатая или цепная передача;
17 - червячное колесо;
18 - днище;
19 - крыша;
20 - верхние точки окружностей колес.
Описание устройства.
ТС (Фиг.1-3) включает раму или корпус 1, двигатели или приводы 2 вращения колес 4 и четыре продольных рычага подвески 3, на одном конце которых установлены колеса 4, а другие концы соединены с валами 5 продольных рычагов подвески 3. Валы 5 установлены в раме 1 и соединены с приводами поворота 6 продольных рычагов подвески 3 и средствами блокировки 7 валов 5 продольных рычагов подвески 7. ТС содержит электронную систему управления движением 9, содержащую процессор 10, соединенный с датчиками угловых и линейных ускорений 11.
На Фиг.1-а также показана электронная система управления движением 9, содержащая процессор 10, соединенный с датчиками угловых и линейных ускорений 11.
На Фиг.1-b показан вид ТС сбоку при направлении рычагов подвески 3 передних вперед, задних назад. В этом положении ТС обладает максимальной длиной межколесной базы и максимальной продольной устойчивостью. На фиг.1-е показано положение ТС на днище 18 при положении рычагов подвески 3 в вертикальном верхнем положении. При этом положении продольных рычагов подвески 3, колеса 4 находятся над крышей 19 транспортного средства, причем окружности колес превышают уровень крыши 19 транспортного средства, образуя «верхний» клиренс Zh, обеспечивающий при необходимости движение в перевернутом положении (как на фиг.12-с) или его стабилизацию перед самопереворачиванием.
На фиг.1-d показано положение продольных рычагов подвески 3 в плоскости, проходящей через оси валов 5 продольных рычагов подвески 3. При этом продольные рычаги подвески 3 повернуты в одном направлении, а между окружностями колес 4 имеется зазор Zk, позволяющий колесам 4 свободно вращаться, при этом центр тяжести транспортного средства (ЦТ) находится между осями Or1 валов 5 задних продольных рычагов подвески 3 и осями Ok1 задних колес 4.
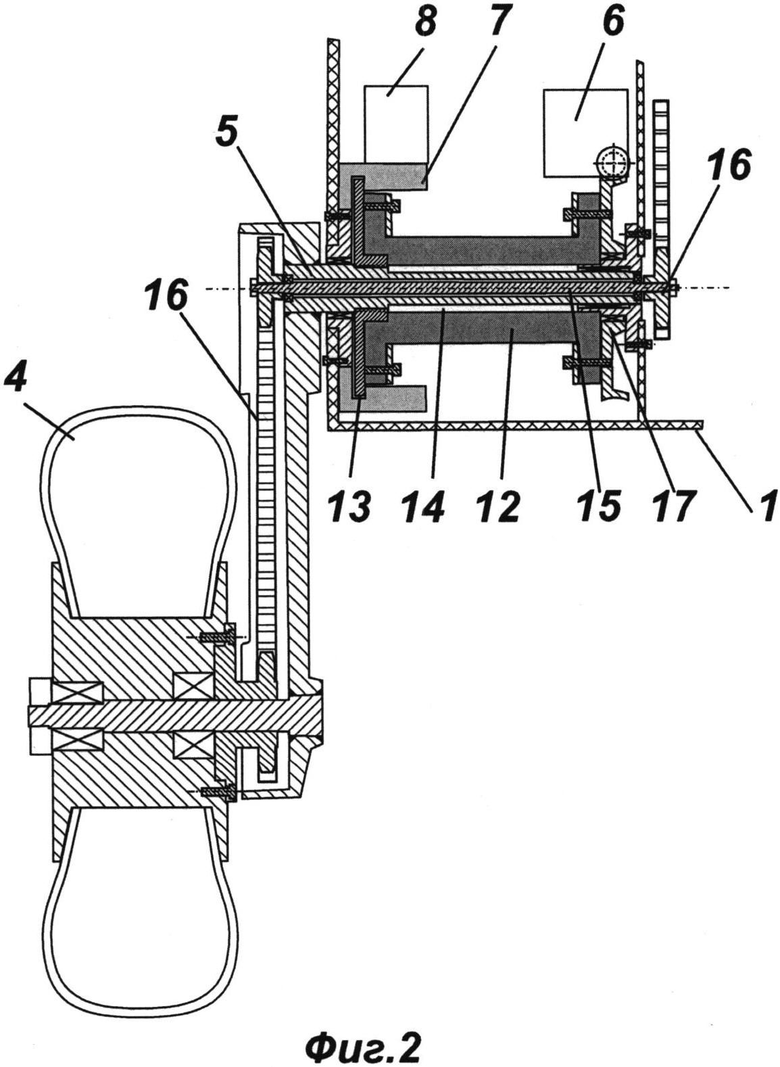
На Фиг.2 показано устройство подвески. Вал 5 рычага подвески 3 соединен с приводом поворота 6 продольных рычагов подвески 3 через полимерную торсионную втулку 12, сделанную, например, из полиуретана, углепластика или кевлара. Вал 5 рычага подвески 3 проходит через осевой канал 14 в полимерной торсионной втулке 12, при этом привод поворота 6 продольных рычагов подвески 3 управляется электронной системой управления движением 9.
На вал 5 рычага подвески 3 одет соединительный диск и/или зубчатое колесо 13, соединенное с валом 5 рычага подвески 3, например, с помощью шлицевого соединения.
К соединительному диску 13 крепится средство блокировки 7 вала 5 продольного рычага подвески 3 и один торец полимерной торсионной втулки 12. Вторым своим торцом полимерная торсионная втулка 12 соединяется с червячным колесом 17 привода поворота 6 продольного рычага подвески 3. При этом средство блокировки 7 вала 5 рычага подвески 3 управляется электронной системой управления движением 9.
На Фиг.1 показан вариант, в котором каждое колесо 4 имеет отдельный электрический привод 2.
На Фиг.2 показан вариант, в котором каждое колесо 4 приводится во вращение с помощь передаточного вала 15, который проходит через вал 5. При этом передаточный вал 15 соединен одной стороной зубчатой или цепной передачей 16 с двигателем транспортного средства 2, а другой стороной зубчатой или цепной передачей 16 с колесом 4.
Транспортное средство высокой проходимости содержит электронную систему управления движением, в памяти которой имеются следующие программы:
1. Программа управления при колесном движении путем управления поворотом продольных рычагов подвески.
2. Программа управления при шагании путем управления поворотом продольных рычагов подвески.
3. Программа изменения высоты корпуса в движении и на месте путем управления поворотом продольных рычагов подвески.
4. Программа изменения угла наклона корпуса по вертикали путем управления поворотом продольных рычагов подвески на разные углы, при этом поворот корпуса по горизонтали на нужный угол осуществляется вращением колес левого и правого борта с разной скоростью.
5. Программа совершения прыжка на месте.
6. Программа совершения прыжка в движении, при этом стабилизация рамы в прыжке осуществляется путем управления поворотом продольных рычагов подвески с помощью электроприводов на основе данных отдатчиков угловых и линейных ускорений.
7. Программа преодоления стандартных препятствий - эскарпа, контрэскарпа и траншеи - путем управления поворотом продольных рычагов подвески.
8. Программа самопереворачивания путем управления поворотом продольных рычагов подвески.
Устройство работает следующим образом.
При колесном движении по дороге или пересеченной местности колесо 4, наезжая на неровности дороги, поворачивает рычаг подвески 3, который передает вращающий момент на вал 5, а затем через соединительный диск 13 на полимерную торсионную втулку 12, а через нее на червячное колесо 17. Привод поворота 6 продольного рычага подвески 3 при этом удерживает червячное колесо 17 в заданном положении. Вследствие этого, вращающий момент от рычага подвески 3 закручивает полимерную торсионную втулку 12 на определенный угол и накапливает в ней энергию. Эта энергия может затем расходоваться, например, при обратном повороте вала 5 или в средстве блокировки 7 вала 5 продольного рычага подвески 3, если оно будет способно работать как энергопоглотитель (в данной заявке устройство средства блокировки 7 вала 5 не рассматривается). Таким образом, осуществляется амортизация корпуса при колесном движении. При повороте червячного колеса 17 приводом поворота 6 полимерная торсионная втулка 12 поворачивается, поворачивая вал 5 и рычаг подвески 3. Таким образом, устанавливается положение рычагов подвески.
Изменяя положения рычагов подвески, можно изменять угол наклона ТС в вертикальной плоскости от +45-60 градусов (Фиг.3) до -45-60 градусов (Фиг. 4). Конструкция ТС обеспечивает ему возможность изменения угла наклона корпуса по вертикали, а также поворота корпуса «по танковому». Это позволяет обеспечить наведение оружия без использования башни.
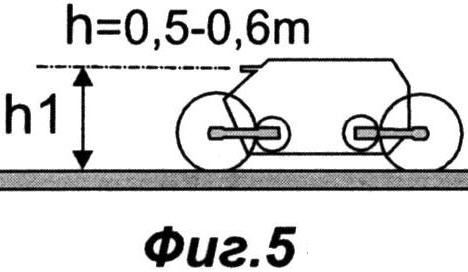
Колесное движение осуществляется при горизонтальном положении рычагов подвески или при положении, близком к этому (Фиг.5). В таком режиме передние рычаги подвески 3 направлены вперед, а задние рычаги подвески 3 направлены назад. Транспортное средство при высоте корпуса 0.5-0.6 м и диаметре колес 0.4 м при таком положении рычагов будет иметь максимальную высоту порядка 0,7-0,8 м, а гипотетическую высоту линии прицеливания (например, это важно для боевых роботов) на уровне 0,5-0,6 м.
При повороте передних рычагов подвески 3 на 30-40 градусов по часовой стрелке, а задних рычагов подвески 3 на такой же угол, но против часовой стрелки (Фиг.6) транспортное средство опускается на днище. При этом его высота составит 0,5-0,6 м, а высота линии прицеливания будет равна 0,3-0,4 м. Робот на базе данного ТС в таком положении как бы лежит, маскируясь неровностями рельефа.
При повороте передних и задних рычагов подвески 3 на 90 градусов вниз (Фиг.7) транспортное средство приподнимается на максимальную высоту. При этом его высота составит 1,0-1,2 м (в зависимости от длины рычагов 3), а высота линии прицеливания будет равна 0,8-1,0 м. Робот на базе данного ТС в таком положении как бы стоит. В таком положении его поле зрения максимально, а линия прицеливания превышает среднюю высоту травяного покрова в 75% климатических поясов. Если корпус ТС не обеспечивает плавучести, то такое положение позволит ТС преодолевать спокойный брод глубиной 0,5-0,6 м.
При ведении боевых действий робот на базе данного ТС сможет оперативно изменять свою высоту, что будет способствовать повышению его боевых возможностей.
При колесно-шагающем движении, используя приводы поворота 6 продольных рычагов подвески 3, осуществляют вращение рычагов 3 в одном направлении. При этом двигатели или приводы вращения колес 2 могут работать. Такой режим движения может использоваться при преодолении глубокого снежного покрова, при движении на болоте и другой труднопроходимой местности.
На фигуре 8 показаны фазы совершения ТС прыжка на месте. Все команды управления формирует система управления движением 9 с помощью процессора 10. Двигатели или приводы 2 колес 4 при этом не работают.
В фазах а) и b) ТС переводится в положение лежания на днище. Затем средства блокировки 7 валов 5 всех продольных рычагов подвески 3 блокируют и удерживают соединительные диски 13 в исходном положении, а приводы поворота 6 продольных рычагов подвески 3 при этом вращают червячные колеса 17 на заданный угол, соответствующий требуемой высоте прыжка на месте.
Вследствие этого, вращающие моменты от приводов поворота 6 закручивают полимерные торсионные втулки 12 на определенный угол, то в них накапливается энергия, необходимая для прыжка ТС. Полимерные торсионные втулки обладают высокой энергоемкостью, обеспечивающей прыжок ТС на высоту до 1.0 метра. Направления закручивания определяет процессор 10 системы управления движением по заранее разработанной программе. Высоту прыжка задает оператор ТС, а все остальные параметры вычисляет система управления движением 9.
В момент совершения прыжка (фаза с) фиг.8) процессор 10 подает сигналы на электроприводы 8 средств блокировки 7, которые синхронно разблокируют все соединительные диски 13. Энергия, накопленная в закрученных полимерных втулках 12, быстро поворачивает рычаги подвески 3 каждого борта навстречу друг другу (фазы с) и d) фиг.8). При этом ТС совершает прыжок на месте, как показано на фиг.8 в фазах е-h. После завершения прыжка рычаги подвески 3 приводятся в исходное положение электронной системой управления движением 9.
Возможность совершения прыжка на месте позволяет ТС кратковременно поднимать высоту линии прицеливания или высоту обзора на уровень порядка 1.8-2.0 м. Такая способность может быть полезна при ведении боя в местности, покрытой высокой растительностью - например, на кукурузном поле. Кратковременный прыжок на месте позволит обозреть местность, обнаружить противника, а затем при повторном прыжке нанести по нему прицельный удар.
На фигуре 9 показано совершение прыжка ТС в движении. Все команды управления формирует система управления движением 9 с помощью процессора 10. Двигатели или приводы 2 колес 4 при этом работают. Фазы совершения прыжка аналогичны фазам прыжка на месте, показанным на фиг.8. Отличием процесса является поворот продольных рычагов подвески в направлении движения (фазы b), с) в фазе закрутки полимерных торсионных втулок 12. Поэтому в момент совершения прыжка продольные рычаги подвески 3 совершают одинаковый поворот в направлении, противоположном направлению движения - фазы d) и е). После отрыва ТС от поверхности продольные рычаги подвески 3 приводятся в положение приземления фазы f) и g), и ТС совершает приземление.
Программа совершения прыжка в движении следит за положением корпуса с помощью датчиков угловых и линейных ускорений. Стабилизация рамы в прыжке осуществляется путем управления поворотом продольных рычагов подвески 3 с помощью электроприводов на основе данных от датчиков угловых и линейных ускорений. Например, при выявлении кренов, осуществляется синхронный поворот всех продольных рычагов подвески 3, так чтобы был создан противоположно направленный момент вращения, выравнивающий положение корпуса. Например, если происходит крен корпуса на левый борт вниз, производится быстрый подъем рычагов правого борта и одновременно опускание продольных рычагов подвески 3 левого борта. Момент инерции от поднимаемых продольных рычагов подвески 3 с колесами 4 способен эффективно балансировать положение корпуса, выравнивая его в полете. Аналогичным способом можно выравнивать положение корпуса по тангажу. Например, в случае опасного наклона корпуса вниз, можно опустить передние продольные рычаги подвески 3 и поднять задние продольные рычаги подвески. При промежуточных кренах, процессор 10 вычисляет необходимые корректировки по заданной программе и осуществляет стабилизацию полета ТС в прыжке. Это позволит избежать переворотов ТС и падений в непредусмотренном положении. Расчеты показывают, что предложенное ТС будет способно совершать горизонтальные прыжки в движении протяженностью до 4-х метров. При этом, чем выше скорость движения ТС, тем большую длину в прыжке он сможет преодолеть.
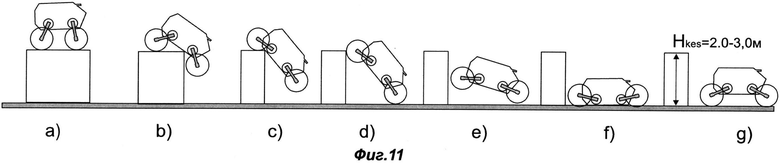
На фигурах 10 и 11 показаны фазы преодоления эскарпа и контрэскарпа. Как видно из натурного моделирования, предлагаемое транспортное средство при высоте корпуса 0.5-0.6 м и диаметре колес 0.4 м способно преодолевать эскарпы высотой 1.0-1.2 метра, а контрэскарпы до 2.0-3.0 м, что превосходит показатели проходимости наилучших современных танков высотой 2.7-3.0 метра. При прыжках с контрэскарпа положение ТС в полете стабилизируется путем балансировки продольными рычагами подвески, как было описано ранее.
На фигуре 12 показаны фазы самопереворачивания ТС. При перевороте ТС на крышу или на бок в фазе а) производится сведение колес (фазы b) и с)) и выравнивание положения ТС. Затем в фазе d) производится подъем передних колес и опускание задних колес. Если соблюдается условие, при котором центр тяжести транспортного средства находится между осями валов задних рычагов подвески и осями задних колес, произойдет самопереворачивание ТС по фазам е), f) и g) и ТС примет нормальное положение в фазе h).
Способность к самопереворачиванию значительно повышает живучесть и проходимость ТС, делает его нечувствительным к ошибкам операторов. Это свойство является важнейшим и уникальным свойством заявляемого ТС. Ни одно другое ТС или современное транспортное средство, состоящее на вооружении, не способно к совершению таких действий и при переворачивании неизбежно выходит из строя или требует серьезного ремонта.
На фигуре 13 показан вариант укладки ТС предлагаемого типа в кузове автомобиля Камаз-53212. При весе в 100 кг одним грузовиком можно будет перевозить до сорока ТС.
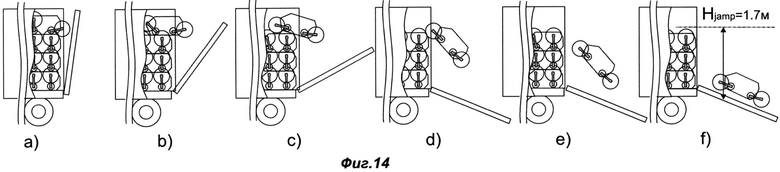
На фигуре 14 показан вариант самовыгрузки ТС из кузова автомобиля. При разгрузке ТС совершают прыжки с верхних ярусов на наклонный борт автомобиля.
Возможность компактной перевозки позволяет в короткие сроки создать высокую концентрацию роботов на месте боевых действий.
Предлагаемая конструкция ТС обеспечивает ему:
- возможность самопереворачиваемости, т.е. возвращения в исходное положение при
- случайном переворачивании транспортного средства;
- возможность движения в перевернутом положении;
- возможность опускания на днище;
- возможность подъема корпуса на высоту рычагов подвески;
- возможность лазания при преодолении препятствий;
- возможность компактной укладки при транспортировке.
Как видно из результатов натурного моделирования, предлагаемое транспортное средство при высоте корпуса 0.5-0.6 м и диаметре колес 0.4 м способно преодолевать эскарпы высотой 1.0-1.2 метра, а контрэскарпы до 2.0-3.0 м, что превосходит показатели проходимости наилучших современных танков.
Способность к самопереворачиванию значительно повышает живучесть и проходимость ТС, делает его нечувствительным к ошибкам операторов. Это свойство является важнейшим и уникальным свойством заявляемого ТС. Ни одно другое ТС или современное транспортное средство, состоящее на вооружении, не способно к совершению таких действий и при переворачивании неизбежно выходит из строя или требует серьезного ремонта.
Предложенная конструкция ТС найдет применение в небольших и дешевых боевых роботах, массовое применение которых позволит заменить живых людей на поле боя.
Массовое применение подразделений боевых минироботов позволит успешно противостоять не только высокоточному оружию, но и многомиллионным армиям агрессоров, сохраняя при этом самое ценное, что есть в нашей стране - жизни наших сограждан.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМ ДВИЖИТЕЛЕМ | 2018 |
|
RU2684956C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С УПРАВЛЕНИЕМ КРЕНОМ | 2003 |
|
RU2264306C2 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ МОБИЛЬНОГО РОБОТА НА СКЛАДЕ | 2019 |
|
RU2748441C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2176607C1 |
| БОЕВАЯ МАШИНА-РОБОТ | 2016 |
|
RU2624116C1 |
| Съемная ходовая часть вездеходного комплекса | 2024 |
|
RU2834096C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1998 |
|
RU2156203C2 |
| МНОГОЦЕЛЕВОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2005 |
|
RU2297927C2 |
| ПРЫГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО (Д) | 2003 |
|
RU2250173C2 |









Изобретение относится к специальным самоходным транспортным средствам высокой проходимости. Транспортное средство включает корпус, приводы вращения колес, четыре продольных рычага подвески, а также электронную систему управления движением. На одном конце рычагов установлены колеса, а другие концы соединены с валами рычагов подвески, установленными в раме и соединенными с торсионами, приводами поворота продольных рычагов подвески и средствами блокировки валов рычагов подвески. Длина и положение рычагов подвески в корпусе, а также внешний диаметр колес обеспечивают выполнение различных условий работы. В положении рычагов подвески, так, чтобы колеса находились над крышей транспортного средства, окружности колес превышают уровень крыши транспортного средства, образуя клиренс, обеспечивающий движение или стабилизацию корпуса в таком положении. В положении рычагов подвески в плоскости, проходящей через оси продольных рычагов подвески, так чтобы рычаги подвески при этом были повернуты в одном направлении, между окружностями колес имеется зазор, позволяющий колесам свободно вращаться. Достигается повышение маневренности и проходимости транспортного средства, за счет возможности совершения прыжковых движений при преодолении препятствий, возможности совершения лазательных движений при преодолении препятствий, а также возможности самопереворачивания рамы при опрокидывании. 12 з.п. ф-лы, 14 ил.
1. Транспортное средство высокой проходимости, включающее раму или корпус, двигатели или приводы вращения колес и четыре продольных рычага подвески, на одном конце которых установлены колеса, а другие концы соединены с валами рычагов подвески, установленными в раме и соединенными с торсионами, приводами поворота продольных рычагов подвески и средствами блокировки валов рычагов подвески, а также электронную систему управления движением, содержащую процессор, соединенный с датчиками угловых и линейных ускорений, отличающееся тем, что длина и положение рычагов подвески в корпусе, а также внешний диаметр колес обеспечивают выполнение следующих условий: в положении рычагов подвески, так, чтобы колеса находились над крышей транспортного средства, окружности колес превышают уровень крыши транспортного средства, образуя клиренс, обеспечивающий движение или стабилизацию корпуса в таком положении, а в положении рычагов подвески в плоскости, проходящей через оси продольных рычагов подвески, так чтобы рычаги подвески при этом были повернуты в одном направлении, между окружностями колес имеется зазор, позволяющий колесам свободно вращаться, при этом центр тяжести транспортного средства находится между осями валов задних рычагов подвески и осями задних колес или между осями валов передних рычагов подвески и осями передних колес.
2. Транспортное средство высокой проходимости по п.1, отличающееся тем, что вал рычага подвески соединен с приводом поворота продольных рычагов подвески через полимерную торсионную втулку, сделанную, например, из полиуретана, углепластика или кевлара, причем вал рычага подвески проходит через осевой канал в полимерной торсионной втулке, при этом привод поворота продольных рычагов подвески управляется электронной системой управления движением.
3. Транспортное средство высокой проходимости по п.2, отличающееся тем, что на вал рычага подвески одет соединительный диск и/или зубчатое колесо, соединенный с валом рычага подвески, например, с помощью шлицевого соединения, к которому крепится средство блокировки вала рычага подвески и один торец полимерной торсионной втулки, которая вторым своим торцом соединяется с червячным колесом привода поворота продольного рычага подвески, при этом средство блокировки вала рычага подвески управляется электронной системой управления движением.
4. Транспортное средство высокой проходимости по п.3, отличающееся тем, что каждое колесо имеет отдельный электропривод.
5. Транспортное средство высокой проходимости по п.3, отличающееся тем, что через вал рычага подвески проходит передаточный вал, соединенный одной стороной зубчатой или цепной передачей с двигателем транспортного средства, а другой стороной зубчатой или цепной передачей с колесом.
6. Транспортное средство высокой проходимости по п.1, отличающееся тем, что электронная система управления движением содержит программу управления при колесном движении путем управления поворотом продольных рычагов подвески.
7. Транспортное средство высокой проходимости по п.1, отличающееся тем, что электронная система управления движением содержит программу управления при шагании путем управления поворотом продольных рычагов подвески.
8. Транспортное средство высокой проходимости по п.1, отличающееся тем, что электронная система управления движением содержит программу изменения высоты корпуса в движении и на месте путем управления поворотом продольных рычагов подвески.
9. Транспортное средство высокой проходимости по п.1, отличающееся тем, что электронная система управления движением содержит программу изменения угла наклона корпуса по вертикали путем управления поворотом продольных рычагов подвески на разные углы, при этом поворот корпуса по горизонтали на нужный угол осуществляется вращением колес левого и правого борта с разной скоростью.
10. Транспортное средство высокой проходимости по п.1, отличающееся тем, что электронная система управления движением содержит программу совершения прыжка на месте.
11. Транспортное средство высокой проходимости по п.1, отличающееся тем, что электронная система управления движением содержит программу совершения прыжка в движении, при этом стабилизация рамы в прыжке осуществляется путем управления поворотом продольных рычагов подвески с помощью электроприводов на основе данных от датчиков угловых и линейных ускорений.
12. Транспортное средство высокой проходимости по п.1, отличающееся тем, что электронная система управления движением содержит программы преодоления стандартных препятствий - эскарпа, контрэскарпа и траншеи - путем управления поворотом продольных рычагов подвески.
13. Транспортное средство высокой проходимости по п.1, отличающееся тем, что электронная система управления движением содержит программу самопереворачивания путем управления поворотом продольных рычагов подвески.
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2176607C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| US 3747717 A, 24.07.1973 | |||
| JPS 60148780 A, 06.08.1985 | |||
| US 3057319 A, 09.10.1962 | |||

